可調式電風扇 8051 應用
8051 application of an adjustable Electric Fan
作者:張昊、李東儒、練書廷、黃泓勳、康智堯
系級:電機工程學系 三乙 學號:D0261574、D0392308、D0281793、D0189565、D0392355 開課老師:何子儀 課程名稱:微處理機實習 開課系所:電機工程學系 開課學年:103 學年度 第 2 學期
中文摘要
本專題主要在設計與製作一個以微控制器為基礎之可調式電風 扇,使其能夠具有上下移動,並且具有左右旋轉 360 度之功能,使電 扇作用的範圍更加廣泛。另外,在擁有一定轉速的情況下,亦同時具 有低功率損耗與節能的效益,藉由長按按鈕可獲得高轉速之方便性, 使本專題設計之電風扇達到具有智慧型之功能。本專題以微控制器為 核心,通過五個按鈕作為輸入,將訊號送到微控制器經運算處理後, 輸出控制訊號至驅動器藉以控制轉動,達到電扇全方位轉動與轉速控 制。所謂全方位轉動即是由馬達 1 控制電扇上下垂直移動,馬達 2 則 控制 360 度旋轉,然後馬達 3 控制扇葉轉動與轉速變化。最後,本專 題完成一個智慧電風扇之原型機,並且展示其各項功能與效能,實驗 結果驗證本專題設計之可實現性與真實性。 關鍵字:可調式、節能、微控制器、馬達Abstract
The main idea of this program is to design and make an adjustable fan basic on the micro controller which will make it able to move up side down and also turn around 360 degrees of rotation in order to make the function of the fan more widely. In addition, within a stable speed, low power wastage and energy conservation benefit, through long pressing the button conveniences, this program’s design can achieve intelligent function. As the core of the program, microcontroller, input with five buttons, send the signal to the main controller then calculate it. After that output the control signal to the actuator in order to control the rotation, make the fan achieve all-around rotation of the fan speed control. All-around rotation which means use motor 1 to control the vertical move of the fan, then use motor 2 to control the 360 degrees of the rotation, also use motor 3 to control the fan speed rotation changes. In the end, this program accomplished a prototypal intelligent fan and showed all
function and efficiency the fan has. The conclusion of the experiment will verify the realizability and authenticity of this program.
目 次
中文摘要………01 英文摘要………02 目次………03 圖目錄………04 第一章 緒論………05 第二章 系統架構(硬體架構、硬體機構、軟體流程) ………06 第三章 系統功能………...14 第四章 實驗結果及操作說明………...14 第五章 結果與討論………...16 第六章 組員工作分配……….……...17 第七章 組員心得……….…...18 附錄(程式碼、Capture、Layout、實體圖)………...20 參考資料……….……….24圖目錄
圖 2.1 硬體設計圖………..06 圖 2.2 8051 實體圖……….07 圖 2.4 H 橋電路馬達驅動電路圖………..08 圖 2.6 集電環結構圖………..09 圖 2.7 1 號馬達流程圖………...10 圖 2.8 2 號馬達流程圖………...11 圖 2.9 3 號馬達流程圖………...12 圖 2.10 軟體流程圖………13 圖 4.1 主控制板實體圖………..15 圖 A.1 Capture 電路圖………22 圖 A.2 電路板 Layout 圖………22 圖 A.3 實體圖...23第一章緒論
現代的科技發展迅速,人們也越來越注重家電用品及電器裝置 其”便利性”及”節能環保”的問題,冷氣機雖然是可以讓我們快速 的解除炎熱的感受,但是它具有巨大的消耗功率以及造成環境問題, 然而電扇所帶來的影響遠遠小於冷氣,相較之下電扇既節能又能夠有 效率的降低環境暖化的問題。現在市面上的電風扇雖然都具有節能的 功能,但是仍然有些問題需要更進一步的改善,我們的專題設計就是 針對一些部份去解決並改善。本專題使用之一般平價的風扇,其葉扇 轉動所能及角度相當有限,本專題因此擬藉由為微控制器之運算控制 增加葉扇轉動角度,使電扇達到 360°的旋轉範圍;第二則是上下的 移動,通常使用較平價的電扇時,若要調整其高度必須透過手動的方 式,但是本設計把電扇的上下移動功能由手動的方式改成按鈕操控決 定其上下的高度,達到任意高度可調整的功能。第二章系統架構
此章節主要分為硬體架構,硬體流程以及軟體流程,並逐一論述。2.1 硬體架構
本專題硬體如圖 2.1 所示。主要用到 8051 單晶片,馬達驅動器, 集電環等,次要機械部分則為:齒輪、螺桿、軸承以及螺帽。圖 2.1 即為硬體設計圖。 圖 2.1 硬體設計圖2.1.1 8051 單晶片簡介
如圖 2.2 為 8051 實體圖,8051 是一種 8 位元的單晶片微控制 器,屬於 MCS-51 單晶片的一種,由英特爾公司於 1981 年製造到現在, 有更多的 IC 設計商,如 Atmel、飛利浦、華邦等公司相繼開發了功 能更多、更強大的兼容產品。 圖 2.2 8051 實體圖 8051 單晶片是同步式的順序邏輯系統,系統的工作完全是依賴系統 內部之時脈信號,藉以產生各種動作週期及同步信號。在 8051 單晶 片中已內建時脈產生器,在使用時只需接上石英晶體振盪器(或其它 振盪子)及電容,就可以讓系統產生正確的時脈信號。英特爾原來的 8051 系列的開發利用 NMOS 技術,但後來的版本中在其名稱加入字 母 C(例如,80C51),確定使用 CMOS 技術,這樣比 NMOS 節省能源, 使它們更適合於電池供電設備。2.1.2 馬達驅動器
本專題所用的馬達驅動電路為 H 橋驅動電路,H 橋驅動電路可將 其連接至負載及控制輸出端兩端電壓反相/電流方向達到控制順轉及 反轉之功能。這類電路常見於機器人及其他實作場合,例如直流馬達 的順反向控制、轉速控制及步進馬達控制(雙極型步進馬達還必須要 包含兩個 H 橋的馬達控制器)。 圖 2.3 即為 H 橋馬達驅動電路圖。當給予直流電時,以 12V 電壓 驅動。當輸入至 Q1 與 Q4 的訊號為 1,輸入到 Q2 與 Q3 的訊號為 0 時, Q1、Q4 電晶體導通,為飽和模式;Q2、Q3 電晶體為截止模式。此時 電流經 Q1 再經馬達至 Q4 再接地,馬達正轉。當輸入至 Q2 與 Q3 的訊 號為 1,輸入至 Q1 與 Q4 的訊號為 0 時,Q2、Q3 電晶體導通,為飽和 模式;Q1、Q4 電晶體為截止模式。此時電流經 Q2 再經馬達至 Q3 再 接地,馬達反轉。 M 0.1uf 330 330 330 330 Q1_9013 Q3_9013 Q2_9013 Q4_9013 圖 2.3 H 橋馬達驅動電路圖2.1.3 集電環
集電環也叫導電環、滑環集、流環和匯流環等。它可以用在任何 需要連續旋轉,同時又需要從固定位置到旋轉位置傳輸電源和信號的 機電系統。如圖 2.4 為集電環結構圖,他能夠提高系統性能並簡化系 統結構避免導線在旋轉過程中纏繞打結甚至斷裂。 集電環的材質需要大的機械強度、電的良導體、耐腐蝕性、與電 刷接觸時必須具備耐磨性和穩定的接觸特性。一般鋼質集電環的耐磨 性好,機械強度大,因此大多用於因極性引起集電環磨損差較大的同 步馬達上。 圖 2.4 集電環結構圖2.2 硬體流程
本章節主要介紹三個馬達的控制流程,1 號馬達控制扇葉轉動, 2 號馬達控制電扇 360°旋轉,3 號馬達控制平板上下移動。2.2.1 硬體流程(1 號馬達)
圖 2.5 所示為 1 號馬達執行之軟體流程,此馬達控制扇葉轉動與 停止,按下開始按鈕後 1 號馬達開始轉動,長按開始鍵即可增加轉 速。當按下關閉按鈕後馬達停止轉動。開始 1號馬達轉動扇 葉旋轉 判斷是否放開啟動鈕 Y Y 結束 按下啟動鈕 馬達轉速回歸 按下關閉紐 1號馬達停止轉 動扇葉停止 馬達加速驅動 扇葉旋轉加速 是 否 圖 2.5 1 號馬達流程圖
2.2.2 硬體流程(2 號馬達)
2 號馬達控制平板 360°旋轉,長按旋轉按鈕即可持續轉動,旋轉 到指定位置後鬆開按鈕,平板即停止轉動。如圖 2.6 所示。開始 2號馬達轉動 判斷是否放開啟動鈕 Y Y 結束 按下旋轉鈕 2號馬達停止轉 動 平板停止轉動 驅動平板轉動 是 否 圖 2.6 2 號馬達流程圖
2.2.3 硬體流程(3 號馬達)
3 號馬達主要控制平板的上升與下降,長按上升鍵平板即可上 升。到達指定位置后鬆開按鈕,平板停止運動。長按下降鍵平板即可下降。到達指定位置後鬆開按鈕,平板停止運動。流程圖如圖 2.7 所 示。 開始 3號馬達順時針 轉動 判斷是否放開上升鈕 按下上升鈕 驅動平板上升 是 否 Y1 Y1 3號馬達停止轉 動 平板停止上升 3號馬達停止轉 動 Y3 結束 平板停止下降 3號馬達停止轉 動 3號馬達逆時針 轉動 判斷是否放開下降鈕 按下下降鈕 驅動平版下降 是 Y3 Y4 Y4 圖 2.7 3 號馬達流程圖
2.3 軟體流程
圖 2.8 為軟體流程圖,首先進行初始化按鈕設定。接著進入主程 式,設定 Port1 的輸出全部為 0,確保 2 號及 3 號馬達保持停止狀態。 接著掃描是否按下按鈕。若按下按鈕,則執行副程式,設定 0 與 1 的信號,控制驅動器 4 個 BJT 達到馬達的正反轉或是加速。執行完畢後 重新跳回主程式。若沒按下按鈕,主程式繼續掃描測試區。 開始 開啟1號馬達長 按加速 開啟2號馬達 3號馬達正轉 是否上升 是否旋轉 是否開啟 是否下降 是否關閉 關閉1號馬達使扇葉 停止旋轉 3號馬達反轉 設定Port1輸出全為0 ,2號及3 號馬達保持停止狀態 結束 否 是 是 是 是 是 否 否 否 否 圖 2.8 軟體流程
第三章 系統功能
本專題利用 8051 單晶片作為核心,由 5 個按鈕控制電扇的轉動、 加速、360°旋轉、上升及下降。藉此可達到全方位的轉動,扇葉具有 兩種速度可供選擇。而集電環則使升降馬達的單芯線不會因為馬達旋 轉造成打結。第四章 實驗結果及操作說明
由前圖 2.1 所示,在架設好硬體之後,按開啟按鈕,最上方的 1 號馬達開始轉動,扇葉跟著轉動。長按開啟鍵則使得扇葉加速,放開 速率回歸正常。再來按住旋轉按鈕,中間的 2 號馬達會轉動。由於 2 號馬達軸上有裝設齒輪,透過齒輪,2 號馬達的轉動會帶動整個上平 板轉動,進而達到電扇 360°旋轉。由於上平板的軸底部裝設軸承, 因此不必擔心會帶動中平板轉動,由於按過開啟鍵,因此電扇在水平 旋轉的同時扇葉也會同步轉動。放開旋轉按鈕 2 號馬達停止轉動,上 平板停止旋轉。 按住上升按鈕,使下方的 3 號馬達正轉。由於 3 號馬達與齒輪相 接,透過齒輪,3 號馬達正轉會帶動兩根螺桿旋轉,也帶動中平板上 升。同理電扇在上升的過程中扇葉也會轉動。放開上升按鈕馬達則停 止轉動,中平板停止上升。由於螺桿的下方有裝置軸承,因此不必擔 心螺桿的轉動會帶動下平板的轉動。同理按住下降按鈕,下方的 3 號馬達則會反轉,同理螺桿反轉, 中平板下降。放開下降按鈕馬達則停止轉動,中平板停止下降。 圖 4.1 為主控制板實體圖及使用說明。主要由 5 個按鈕及 8051 構成。 本專題同一時間只能按下一個按鈕,同時按下多個按鈕也只會執行一 件事情。 圖 4.1 主控制板實體圖
第五章 結果與討論
本專題實際操作效果良好,不僅能順利轉動,也能平穩的上升及 下降。更具備多種手調功能。唯一不足之處則是自己製作的集電環接 觸面不夠良好。在上平板 360°旋轉的過程中,送到 1 號扇葉馬達的 電流不是很穩定,再加上 12V 電池的驅動電流不夠大,因此有時在平 板旋轉的過程中,1 號扇葉馬達可能發生會停止轉動狀況。解決這一 問題的辦法在於選用工業製作精良的集電環以及改進驅動板電路。這 也是我們之後對本專題更進一步完善的措施。 未來展望則是利用手機 APP,控制電扇的轉動以及加上紅外線 Sensor 來感知人的移動,跟隨人的移動且自動調整吹風位置。第六章 組員工作劃分
組員名稱 工作分配 張昊 電路設計、程式設計、機械架構設計、專題規劃 李東儒 成品組裝、洗板與焊接、畫 Capture 電路圖 練書廷 材料採購、成品組裝黃泓勳 程式設計、電路設計、LAYOUT 康智堯 LAYOUT、洗板與焊接、電路設計
第七章 組員心得
張昊: 本專題真正的難度在於實體部分,其難點有:1.上升下降的設計 與實際效果分析。2.軸承與齒輪以及螺桿的尺寸搭配。3.集電環的設 計與製作。在軟體部分,我們通過設立一個測試區來不斷重複檢測按 鈕是否有被按下而進一步去執行按下按鈕后的程式,並且通過撰寫程 式使得輸出電流能夠高速或是低速轉動直流馬達。這是軟體部分較為 複雜難寫的點。總的來說,硬體實作比軟體程式難,但我們還是克服 了種種困難最終完成了本專題,我感到十分欣慰與自豪。 李東儒: 藉由這次的專題實驗,發現原本設定的題目之外,我們還有碰到 其他原本不在我們愈其中的問題,例如:集電環的使用,原本我們在 預設題目時,沒有考慮到電扇的轉動會使我們的電線打結,但是透過 詢問學長與參考網路上面的資料瞭解集電環的操作與原理,且基於成本的許時間的問題,我們最後決定自製簡易的集電環。而且還有一些 小部分的問題都是之前沒有料想到的,所以對於這樣的經驗。讓我了 解到除了解決問題本身之外,還需要具備其他更多的知識以克服往後 的實驗。 練書廷: 經由這次微處理器專題,我更了解到團隊合作的重要性。我想如 果只有我一個人可能完全做不出來任何一個像樣的東西吧。感謝這次 各組員的分工,雖然我無法在程式方面做出什麼貢獻,但在設計圖, 或是文書方面盡我所能。 黃泓勳: 本組的專題是可調式電風扇,當初看過組員設計的草圖之後,一 方面肯定組員們構思,另一方面則是對製造過程感到困惑,畢竟只是 第一次接觸組合語言,一時難把理論和實務結合,於是實習課的過程 中就變成了學習,layout 過去在電子學實習的時候操作過一次,但 是這次操作起來還是略顯生疏,程式方面多虧了幾位有想法的組員, 把腦海中的構思付諸到程式上,各個環節都兼顧到了,才產生出了這 樣的作品,自己雖然是學長身分,但也沒甚麼值得拿出來說嘴,同組
的學弟們貢獻都大得多,雖然有點自嘆不如,就把它當作一種學習經 驗,畢竟除了大三四的專題研究,其他課程可能也很難像這堂課一 樣,從設計、成型、簡報製作、正式的上台報告一應俱全,雖然流程 看起來好像很繁雜,但這樣的場景或許是我們日後求職的寫照,能在 大二就能接觸到這門必修,也算是不小的收穫。 康智堯: 很高興能夠完成這次的專題實做雖然只是幫忙 layout pcb 但能 看見成品也是有莫大的光榮感,也感謝其他組員的努力才能順利完 成。
附錄 A
程式碼
ORG 0000H TEST: MOV P1,#00000000B MOV P3,#11111111B JNB P3.1,DOWN JNB P3.0,UP JNB P3.2,TURN JNB P3.3,ON JNB P3.4,OFF SJMP TEST UP: MOV P1,#00000000B SETB P1.4 SETB P1.5 CLR P1.6 CLR P1.7 JNB P3.0,UP SJMP TEST DOWN: MOV P1,#00000000B SETB P1.6 SETB P1.7 CLR P1.5 CLR P1.4 JNB P3.1,DOWN SJMP TEST TURN: MOV P1,#00000000B SETB P1.2 SETB P1.3 CLR P1.0 CLR P1.1 JNB P3.2,TURN SJMP TESTON: MOV P2,#00000000B SETB P2.2 SETB P2.3 CLR P2.0 CLR P2.1 SJMP TEST OFF: MOV P2,#00000000B SJMP TEST END
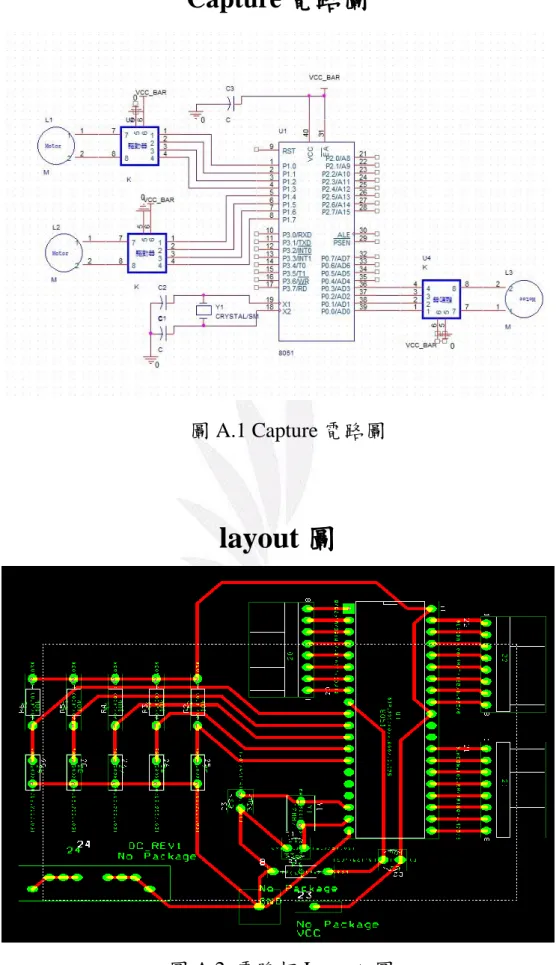
Capture 電路圖
圖 A.1 Capture 電路圖
layout 圖
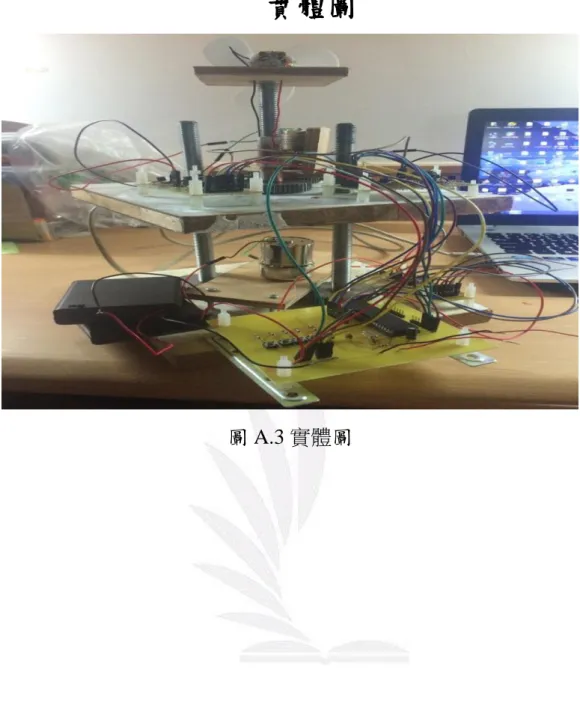
實體圖
參考文獻
[1] Brief H-Bridge Theory of Operation-April 1998, Written by Jim Brown September 2002, page format revised, links updated by Bob Jordan
[2] Embedded System of DC Motor Closed Loop Speed Control based on 8051 Microcontroller-Written by Reetam Mondal
[3]SynthesizableVHDModelof8051,http://www.cs.ucr.edu/~dalton/i8051/ i8051syn/
[4] ThadiappanKrisnan, “A Fast-Response DC Motor Speed Control System”,IEEE Transactions on Industry Applications, Vol-IA-10, Issue- 5, 1974, pp.643-651.
[5] Tze-Yee Ho, Li-Yuan Chen, Lung-Hsian Yang, Wei-Lun Lin,“The Design and Implementation of a Motor Drive with DTC,”Mechanicak and Electronics Engineering III,Journal of 2011 Applied Mechanics and Materials, P130-134,2841,October 2011.
[6] Tze-Yee Ho,Mu-Song Chen,Li-Yuan Chen, Lung-Hsian Yang,“The design of a PMSM motor drive with active power factor correction,” pp. 978-1-4577-0536-6/11, 2011 IEEE.
[7] P. Pillay, R. Krishnan,“Application characteristics of permanent magnet synchronous on brushless dc moctors for servo drives,” IEEE Transactions on Industry Applications, Vol.27, no.5, pp.986-996, Sep/Oct 1991.