Observer-Based Direct Adaptive Fuzzy-Neural
Control for Nonaffine Nonlinear Systems
Yih-Guang Leu, Wei-Yen Wang, Senior Member, IEEE, and Tsu-Tian Lee, Fellow, IEEE
Abstract—In this paper, an observer-based direct adaptive
fuzzy-neural control scheme is presented for nonaffine nonlinear systems in the presence of unknown structure of nonlinearities. A direct adaptive fuzzy-neural controller and a class of generalized nonlinear systems, which are called nonaffine nonlinear systems, are instead of the indirect one and affine nonlinear systems given by Leu et al. By using implicit function theorem and Taylor series expansion, the observer-based control law and the weight update law of the fuzzy-neural controller are derived for the nonaffine nonlinear systems. Based on strictly-positive-real (SPR) Lyapunov theory, the stability of the closed-loop system can be verified. Moreover, the overall adaptive scheme guarantees that all signals involved are bounded and the output of the closed-loop system will asymptotically track the desired output trajectory. To demonstrate the effectiveness of the proposed method, simulation results are illustrated in this paper.
Index Terms—Direct adaptive control, fuzzy-neural control,
nonaffine nonlinear systems, output feedback control.
I. INTRODUCTION
A
DAPTIVE control theory has been an active area of re-search for at least a quarter of a century [1]–[11]. For linear systems, there have been some researches on stability analysis of adaptive control systems, design of adaptive observers, and adaptive control of plants [2], [3]. Also, many researchers focus on robust adaptive control that guarantees signal boundedness in the presence of modeling errors and bounded disturbances [4]–[6]. For nonlinear systems, some adaptive control schemes via feedback linearization have been reported [7]–[11]. The fun-damental ideal of feedback linearization is to transform a non-linear system into a non-linear one. Then, non-linear control techniques are employed to acquire desired performance.Recently, since neural networks [12] and fuzzy logic [13] are universal approximators, some adaptive control schemes of non-linear systems via fuzzy logic and/or neural networks [14]–[19], [27]–[29], [37]–[40] have been proposed. Likewise, for a class of nonlinear continuous-time systems, adaptive control using
Manuscript received December 9, 2003; revised May 27, 2004. This work was supported by the National Science Council, Taiwan, R.O.C., under Grant NSC 92-2213-E-030-001.
Y.-G. Leu is with the Department of Electronic Engineering, Hwa Hsia In-stitute of Technology, Chung-Ho City, Taipei 23560, Taiwan, R.O.C. (e-mail: [email protected]).
W.-Y. Wang is with the Department of Electronic Engineering, Fu-Jen Catholic University, 24205 Taipei, Taiwan, R.O.C. (e-mail: [email protected])
T.-T. Lee is with the Department of Electrical Engineering, National Taipei University of Technology, Taipei 106, Taiwan, R.O.C. and also with the Depart-ment of Electrical and Control Engineering, National Chiao Tung University, Hsinchu 30010, Taiwan, R.O.C. (e-mail: [email protected]).
Digital Object Identifier 10.1109/TNN.2005.849824
neural networks has been proposed in [20] by feedback lin-earization. A dynamic recurrent neural-network-based adaptive observer for a class of nonlinear systems has been presented in [21]. In [22], [23], and [37], the output feedback controllers have been developed based on a high-gain observer used to estimate the time derivatives of the system output by using neural net-works. By using the high gain observer, the closed system may exhibit a peaking phenomenon in the transient behavior [23], [37]. The controller saturates to prevent peaking [23], [37]. In this paper, an observer-based adaptive fuzzy-neural controller is proposed and derived for avoiding the high gain observer and preventing the peaking phenomenon in the transient behavior.
More recently, applications of fuzzy logic incorporated into neural networks in function approximation, decision sys-tems and nonlinear control syssys-tems have been proposed in [24]–[31], [34]–[36]. In [28], the observer-based indirect adap-tive fuzzy-neural controller for affine nonlinear systems has been proposed. Most of them deal with the control problem of the affine nonlinear systems. However, in practice, the control methods of affine nonlinear systems do not always hold and the control methods of the nonaffine nonlinear systems are nec-essary. In [28], the adaptive fuzzy-neural control systems are derived from the indirect adaptive control method, which uses fuzzy-neural networks as function approximators to estimate nonlinear functions of the nonlinear systems. Since nonlinear functions in nonaffine nonlinear systems are implicit functions with respect to the controller, the indirect adaptive control method in [28], which uses fuzzy-neural networks to estimate the nonlinear functions, cannot be employed to the nonaffine nonlinear systems again. On the other hand, direct adaptive fuzzy-neural controllers, in which fuzzy-neural networks are used to directly be controllers rather than to be nonlinear functions, are suitable for the nonaffine nonlinear systems. Theoretical justification on the use of the direct adaptive fuzzy controllers in [14] using a state feedback approach is valid if all of the system states are available for measurement. In prac-tice, however, the state feedback control does not always hold because system states are not always available. Estimations of states from the system output for output feedback control design of the direct adaptive fuzzy-neural controller is required. The goal of this paper is to develop an observer-based adaptive fuzzy-neural control scheme that extends the design method in [28] by using direct adaptive control instead of indirect is presented for the nonaffine nonlinear system in the presence of unknown structure of nonlinearities. By using implicit function theorem, and Taylor series expansion, the output feedback control law and the update laws are derived. Moreover, the overall adaptive scheme guarantees that all 1045-9227/$20.00 © 2005 IEEE
signals involved are bounded and the output of the closed-loop system will asymptotically track the desired output trajectory.
The paper is organized as follows. In Section II, the problem is formulated and a brief description of fuzzy-neural networks is presented. Design methodology of the direct adaptive fuzzy-neural controller is included in Section III. In Section IV, simu-lation results are presented to confirm the effectiveness and ap-plicability of the proposed method. Finally, Section V concludes the paper.
II. PROBLEMFORMULATION ANDFUZZY-NEURALNETWORK Consider the single-input–single-output (SISO) nonaffine nonlinear system of the form
(1) where is a vector of states, and and are the control input and system output, respectively. and are unknown smooth vector functions. In nonaffine systems, the nonlinear functions are implicit functions with respect to the controller .
Suppose that the nonaffine nonlinear system possesses a strong relative degree. Then, the system can be transformed into the following form [23]:
(2) where .. . .. . is a vector of the transformed states, and is a smooth function. Here, we assume that the structure of is unknown. Without
losing generality, we also assume that . In
addition, only the system output is assumed to be measurable. The control objective is to design an observer-based direct adaptive fuzzy-neural controller such that the system output follows a given bounded smooth signal , and all signals involved are bounded.
First, define the reference vector
, the output tracking
error , the tracking error vector , and
, where is
the feedback gain vector, chosen such that the characteristic
polynomial of is Hurwitz because is
controllable. Next, we describe the existence of the control solution for the system (1). According to implicit function theorem [32], there exists a unique ideal implicit feedback control for the system (1). Equation (2) can be rewritten as
(3) From the definitions of and , we obtain
(4)
By the assumption of for all
and the fact 0, we have
(5)
for all , where .
According to implicit function theorem [32], for each there
exists a unique solution such that 0.Under
the control , (4) can be rewritten as
(6) Because the characteristic polynomial of is Hur-witz, we have
(7) By using Taylor series expansion of the nonlinear system (2) around , we obtain
(8)
where , and stands for higher
order term. Suppose a control input is
(9) where is designed to approximate the control , and the control term is employed to compensate the modeling error. From (4), (8), and (9), we have
(10)
where , and denotes
the estimate of . According to (10), the control objective is to design a state observer for estimating the state vector in (10) in order to regulate to zero.
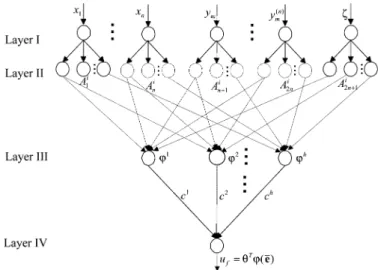
In addition, the configuration of the fuzzy-neural net-work shown in Fig. 1 consists of fuzzy logic and neural network. The fuzzy logic system can be divided into two
Fig. 1. Configuration of a fuzzy-neural approximator.
parts: some fuzzy IF–THEN rules and a fuzzy inference en-gine. The fuzzy inference engine uses the fuzzy IF–THEN rules to perform a mapping form an input linguistic vector to an output linguistic variable . The th fuzzyIF–THENrule is written as
If is and and is and is
and and is
and is then is (11)
where and are fuzzy sets [14], [15]. By
using product inference, center-average and singleton fuzzifier, the output of the fuzzy-neural network can be expressed as
(12)
where is the membership function value of the fuzzy variable, is the total number of the IF-THENrules, is the
point at which 1, is an
adjustable parameter vector, and is
a fuzzy basis vector, where is defined as
(13)
When the inputs are given into the fuzzy-neural network shown in Fig. 1. The truth value (layer III) of the antecedent part of the th implication is calculated by (13). Among the commonly used deffuzzification strategies, the output (layer IV) of the fuzzy-neural network is expressed as (12). The fuzzy logic approximator based on the neural network can be established [25], [27]. Fig. 1 shows the configuration of the fuzzy-neural function approximator. The approximator has
four layers. At layer I, nodes, which are input ones, stand for the input linguistic variables. At layer II, nodes represent the values of the membership function value. At layer III, nodes are the values of the fuzzy basis vector . Each node of layer III performs a fuzzy rule. The links between layer III and layer IV are full connected by the weighting vector. , i.e., the adjusted parameters. At layer IV, the output stands for the value of .
III. DESIGN OFDIRECTADAPTIVEFUZZY-NEURAL CONTROLLERVIAOUTPUTFEEDBACK
In this section, our primary task is to design an observer that estimates the state vector in (10), to use the fuzzy-neural net-work to approximate the control and to the develop direct adaptive output-feedback update law to adjust the parameters of the fuzzy-neural network in order to achieve the control ob-jective.
First, we replace in (9) by the output of the fuzzy-neural network, in (12), i.e.
(14)
where .
Next, consider the following observer that estimates the state vector in (10):
(15)
where is the observer gain vector,
chosen such that the characteristic polynomial of is strictly Hurwitz because is observable. The control term
is employed to compensate the modeling error.
Although the state observer (15) includes the unknown func-tion , a significant part of our design is that in Theorems 1 and 2, and so we can eliminate the unknown function from the state observer (15). Therefore, the proposed state observer (28) in Theorem 2 of this paper does not require the function , which is assumed as an unknown function.
Define the observation errors as and .
Subtracting (15) from (10), we have
(16) where . Besides, the output error dynamics of (16) can be given as
(17) where is the Laplace variable, and
is the transfer function of (16).
In order to derive the direct adaptive output feedback update law, the following assumption must be required.
Assumption 1 [33]: Let and belong to compact
sets and
, respectively, where denotes the estimate of and and are the upper bounds
of and , respectively. It is known that the optimal parameter vector
lies in some convex region ,
where the radius is a design parameter.
According to Assumption 1, (16) can be rewritten as
(18)
where is an approximation error.
According to (14), (18) can be rewritten as
(19) where . Since only the output in (19) is assumed to be measurable, we use the strictly-positive-real (SPR) Lyapunov design approach to analyze the stability of (19) and generate the direct adaptive output-feedback update law for . Equation (19) can be rewritten as
(20)
where is a known stable
transfer function. In order to employ the SPR-Lyapunov design approach, (20) can be written as
(21)
where ,
, and . is chosen
so that is a proper stable transfer function and is a proper SPR transfer function. Suppose that
, where ,
such that is a proper SPR transfer function. The state–space realization of (21) can be written as
(22)
where ,
and .
For the purpose of stability analysis of the observer-based direct adaptive fuzzy-neural controller, the following assumptions and lemma must be required.
Lemma 1 [14], [27]: Suppose that the adaptive laws are
chosen as (23), shown at the bottom of the page, where the projection operator [14] is given as
Then and .
Assumption 2: The unknown function is bounded by (24) where and positive constants.
Assumption 3: is assumed to satisfy
(25) where is a positive constant.
Remark 1: Due to (6) and (7), and the existence of in
[32], the assumption of boundedness of in
Assumption 1 is reasonable. Since denotes
the estimation of , the assumption of boundedness of is also reasonable. The boundedness of
follows that of (or ). The would be dif-ferentiable, if we choose differentiable functions, for example, exponential functions, to be the fuzzy membership functions. From Lemma 1, the vector is adjustable and differentiable. Therefore, is differentiable. Since is bounded, is bounded. Therefore, Assumption 3 is reasonable. The goal of this paper is to develop a controller , where is designed to approximate the controller in [32] and the con-trol term is employed to compensate the modeling error, to guarantee that all signals involved are bounded and the output of the closed-loop system will asymptotically track the desired output trajectory.
On the basis of the previous discussions, the following theo-rems can be obtained.
Theorem 1: Consider the system (22) that satisfies
Assump-tions 1–3. Let be adjusted by the update law (23), and let be given as
if
if (26)
where . Then converges to zero as .
Proof: Given in the Appendix.
Theorem 2: Consider the nonlinear system (1) that satisfies
Assumptions 1–3. Suppose that the control law is
(27)
if or and
with the adaptive law (23). Let . The state observer (15) becomes
(28) Then all signals in the closed-loop system are bounded, and
converges to zero as .
Proof: Given in the Appendix.
According to the previous theorems, the design algorithm of the direct adaptive fuzzy-neural controller is described as the following.
Design Algorithm
Step 1) Select the feedback and observer
gain vectors , such that
the matrices and
are Hurwitz matrices, respec-tively.
Step 2) Choose appropriate values in
(26), and in (23). In order
to remedy the control chattering, (26) can be modified as
if and ,
if and ,
if
where is a positive constant.
Step 3) Solve the state observer in (28).
Step 4) Construct fuzzy sets for .
From (13), compute the fuzzy
basis vector .
Step 5) Obtain the control law (27), and
the update law (23).
Remark 2: The initial values of should be determined before solving the adaptive laws in (23). The value of in (23) is obtained by trial and error according to the values of . In addition to compute the controller in (27), we need to decide . The chosen value of is obtained by trial and error such that and based on Assumptions 2–3, without using any adaptive tuning procedure in this paper. Larger re-sults in larger control input according to (27). From (26), we see that the absolute value of the control term is the value of . The control term is employed to compensate for external disturbance and modeling error.
Remark 3: Regarding Step 4) of the design algorithm,
the number of fuzzy rules depends on the number of inputs and the number of fuzzy sets of each input. For example,
we can generate fuzzy rules for inputs,
in which each input has fuzzy sets. The input vector is . The member-ship function of each fuzzy set can be a bell-shaped form or others. Then, we can compute the values of the fuzzy bases from (13).
Fig. 2. Overall scheme of the proposed direct adaptive fuzzy-neural control.
To summarize, Fig. 2 shows the overall scheme of the ob-server-based direct adaptive fuzzy-neural control proposed in this paper.
IV. ILLUSTRATIVEEXAMPLES
This section presents the simulation results of the proposed direct adaptive fuzzy-neural controller to illustrate that the sta-bility of the closed-loop system is guaranteed, and all signal in-volved are bounded.
Example 1: Consider the nonlinear system
(29) The control objective is to control the state of the system to track the reference trajectory (case 1) and (case 2). The design parameters are
se-lected as , 5, and . The
feed-back and observer gain vectors are given as
and , respectively. The filter is given
as . The membership functions for ,
are given as
The initial states are chosen to be (case 1),
(case 2), (case 1),
and (case 2). The computer simulation
Fig. 3. Trajectories ofy(t) and y (t) (case 1) in Example 1.
Fig. 4. Trajectories ofx (t) and ^x (t) (case 1) in Example 1.
Fig. 5. Control inputu(t) (case 1) in Example 1.
the state observer can generate the estimated state very fast and correct. Moreover, as shown in Figs. 3 and 6, it is observed that the tracking error is small, and the convergence of tracking error is fast and well. The control signals for two cases are shown in Figs. 5 and 8. The computer simulation results show that the observer-based direct adaptive fuzzy-neural controller can per-form successful control and achieve desired perper-formance for the nonaffine nonlinear systems.
Example 2: Consider the nonlinear system [23]
(30)
Fig. 6. Trajectories ofy(t) and y (t) (case 2) in Example 1.
Fig. 7. Trajectories ofx (t) and ^x (t) (case 2) in Example 1.
Fig. 8. Control inputu(t) (case 2) in Example 1.
The control objective is to control the state of the system
to track the reference trajectory . The
design parameters are selected as , 5, and
. The feedback and observer gain vectors are
given as and ,
respec-tively. The filter is given as . The
membership functions for , are the same as
those in Example 1. The initial states are chosen to be
and . The computer
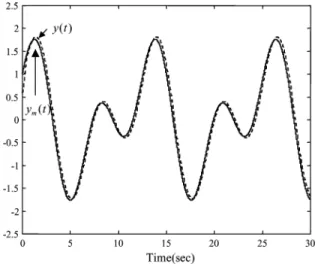
Fig. 9. Trajectories ofy(t) and y (t) in Example 2.
Fig. 10. Trajectories ofx (t) and ^x (t) in Example 2.
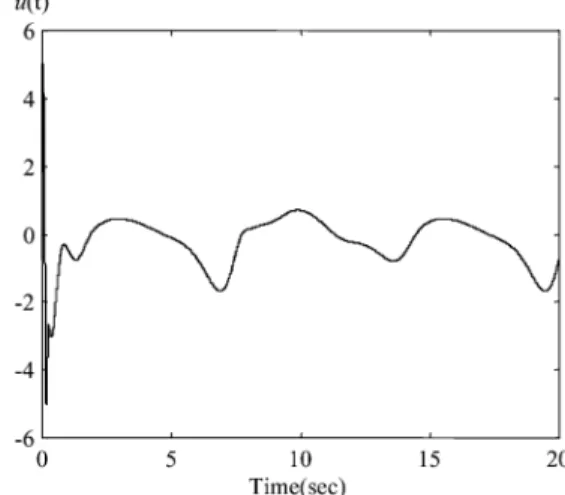
Fig. 11. Control inputu(t) in Example 2.
results, it is observed that the state observer can generate the estimated state very fast and correct. Moreover, it is also ob-served that the tracking error is small, and the convergence of
tracking error is fast and well. In comparison with the control input in [23], using the high gain observer and saturation method to overcome the peaking phenomenon in the transient behavior, the proposed control input shown in Fig. 11 is without satura-tion and smoother than that in [23], especially during the tran-sient period.
V. CONCLUSION
In this paper, an observer-based direct adaptive fuzzy-neural control scheme is presented for nonaffine nonlinear systems in the presence of unknown structure of nonlinearities. To design the output feedback control law, no exact knowledge of struc-ture of system nonlinearities is needed. In addition, the prelim-inary offline tuning of the weighting factors of the fuzzy-neural controller is not required. The overall adaptive scheme guar-antees that all signals involved are bounded and the output of the closed-loop system asymptotically tracks the desired output trajectory. Finally, this method has been applied to control the nonaffine nonlinear system to track a reference trajectory. The computer simulation results show that the observer-based direct adaptive fuzzy-neural controller can perform successful control and achieve desired performance. In the future, investigation on the adaptive tuning of the design parameters and designing multi-input–multi-output (MIMO) systems will be interesting research topics in this field.
APPENDIX
A. Proof of Theorem 1
Consider the Lyapunov-like function candidate
(A.1) where . Differentiating (A.1) with respect to time and inserting (22) in the previous equation yield
(A.2)
Because is SPR, there exists such that
(A.3) where . By using (A.3), (A.2) becomes
(A.4) By using Assumptions 2–3, (26) and the fact
, where , we have
Inserting (23) of Lemma 1 in (A.5) and after some manipulation yields
(A.6) Equations (26) and (A.6) only guarantee that and , but do not guarantee the convergence. Because all variables in the right-hand side of (22) are bounded, is bounded, i.e., . Integrating both side of (A.6) and after some manipulation yields
(A.7) Since the right side of (A.7) is bounded, so . Using
Barbalat’s lemma [3], we have 0. This
com-pletes the proof.
B. Proof of Theorem 2
First, from Theorem 1, we have 0 and
. Using (15) and the fact , we obtain
(B.1) Similarly, because is a Hurwitz matrix and is
bounded, is bounded. From , it follows that
and as . From , it
follows that . The boundedness of follows
that of and . This completes the proof. REFERENCES
[1] R. V. Monopoli, “Model reference adaptive control with an augmented error signal,” IEEE Trans. Autom. Control, vol. AC-19, no. 5, pp. 474–484, Oct. 1974.
[2] K. S. Narendra and A. M. Annaswamy, Stable Adaptive Systems. En-glewood Cliffs, NJ: Prentice-Hall, 1989.
[3] S. S. Sastry and M. Bodson, Adaptive Control: Stability, Convergence,
and Robustness. Englewood Cliffs, NJ: Prentice-Hall, 1989. [4] P. A. Ioannou and K. S. Tsakalis, “A robust direct adaptive controller,”
IEEE Trans. Autom. Control, vol. AC-31, no. 11, pp. 1033–1043, Nov.
1986.
[5] P. A. Ioannou and A. Datta, “Robust adaptive control: A unified ap-proach,” Proc. IEEE, vol. 79, no. 12, pp. 1735–1768, Dec. 1991. [6] P. A. Ioannou and J. Sun, Robust Adaptive Control. Englewood Cliffs,
NJ: Prentice-Hall, 1996.
[7] A. Isidori, Nonlinear Control System. New York: Springer-Verlag, 1989.
[8] J. J. E. Slontine and W. Li, Applied Nonlinear Control. Englewood Cliffs, NJ: Prentice-Hall, 1991.
[9] S. S. Sastry and A. Isidori, “Adaptive control of linearizable systems,”
IEEE Trans. Autom. Control, vol. 34, no. 11, pp. 1123–1131, Nov. 1989.
[10] S. Monaco and D. Normand-Cyrot, “Minimum-phase nonlinear dis-crete-time systems and feedback stabilization,” in Proc. IEEE Conf.
Decision Control, Los Angeles, CA, 1987, pp. 979–986.
[11] B. Jakubezyk, “Feedback linearization of discrete time system,” Syst.
Control Lett., vol. 9, pp. 411–416, 1987.
[12] K. Hornik, M. Stinchcombe, and H. White, “Multilayer feedforward net-works are universal approximators,” Neural Netw., no. 2, pp. 359–366, 1989.
[13] L. X. Wang and J. M. Mendel, “Fuzzy basis functions, universal ap-proximation, and orthogonal least squares learning,” IEEE Trans. Neural
Netw., vol. 3, no. 5, pp. 807–814, Sep. 1992.
[14] L. X. Wang, Adaptive Fuzzy Systems and Control: Design and Stability
Analysis. Englewood Cliffs, NJ: Prentice-Hall, 1994.
[15] M. Jamshidi, N. Vadiee, and T. J. Ress, Fuzzy Logic and Control. En-glewood Cliffs, NJ: Prentice-Hall, 1993.
[16] M. Polycarpou and P. A. loannou, “Modeling, identification and stable adaptive control of continuous-time nonlinear dynamical systems using neural networks,” in Proc. Amer. Control Conf., 1992, pp. 36–40. [17] E. B. Kosmatopoulos, P. A. Ioannou, and M. A. Christodoulou,
“Identi-fication of nonlinear systems using new dynamic neural network struc-tures,” in Proc. IEEE Conf. Decision Control, Arizona, 1992, pp. 20–25. [18] C. A. Rovithakis and M. A. Christodoulou, “Adaptive control of un-known plants using dynamical neural networks,” IEEE Trans. Syst. Man,
Cybern., vol. 24, no. 3, pp. 400–411, Mar. 1995.
[19] F. C. Chen and H. K. Khalil, “Adaptive control of nonlinear systems using neural networks,” Int. J. Control, vol. 55, no. 3, pp. 1299–1317. [20] R. M. Sanner and J. J. E. Slontine, “Gaussian networks for direct
adap-tive control,” IEEE Trans. Neural Netw., vol. 1, no. 6, pp. 837–863, Nov. 1992.
[21] Y. K. Kim, F. L. Lewis, and C. T. Abdallah, “A dynamic recurrent neural-network-based adaptive observer for a class of nonlinear systems,”
Au-tomatica, vol. 33, no. 8, pp. 1539–1543, 1997.
[22] T. Zhang, S. S. Ge, and C. C. Hang, “Adaptive output feedback con-trol for general nonlinear systems using multilayer neural networks,” in
Proc. Amer. Control Conf., pp. 520–524.
[23] S. S. Ge, C. C. Hang, and T. Zhang, “Adaptive neural network control of nonlinear systems by state and output feedback,” IEEE Trans. Syst.
Man, Cybern. B, Cybern., vol. 29, no. 6, pp. 818–828, Dec. 1999.
[24] S. Horikawa, T. Furuhashi, and Y. Uchikawa, “On fuzzy modeling using fuzzy neural networks with the back-propagation algorithm,” IEEE
Trans. Neural Netw., vol. 3, no. 5, pp. 801–806, Sep. 1992.
[25] C. T. Lin and C. S. G. Lee, “Neural-network-based fuzzy logic con-trol and decision system,” IEEE Trans. Comput., vol. 40, no. 12, pp. 1320–1336, Dec. 1991.
[26] C. H. Wang, W. Y. Wang, T. T. Lee, and P. S. Tseng, “Fuzzy B-spline membership function and its application in fuzzy-neural control,” IEEE
Trans. Syst. Man, Cybern., vol. 25, no. 5, pp. 841–851, May 1995.
[27] Y. G. Leu, W. Y. Wang, and T. T. Lee, “Robust adaptive fuzzy-neural con-troller for uncertain nonlinear systems,” IEEE Trans. Robot. Automat., vol. 15, no. 5, pp. 805–817, Oct. 1999.
[28] Y. G. Leu, T. T. Lee, and W. Y. Wang, “Observer-based adaptive fuzzy-neural control for unknown nonlinear dynamical systems,” IEEE Trans.
Syst. Man, Cybern. B, Cybern., vol. 29, no. 5, pp. 583–591, Oct. 1999.
[29] W. Y. Wang, M. L. Chan, C. C. Hsu, and T. T. Lee, “Tracking-based sliding mode control for uncertain nonlinear systems via an adaptive fuzzy-neural approach,” IEEE Trans. Syst. Man, Cybern. B, Cybern., vol. 32, no. 4, pp. 483–492, Aug. 2002.
[30] L. X. Wang, “Stable adaptive fuzzy control of nonlinear systems,” IEEE
Trans. Fuzzy Syst., vol. 1, no. 2, pp. 146–155, May 1993.
[31] B. S. Chen, C. H. Lee, and Y. C. Chang, “H Tracking design of un-certain nonlinear SISO systems: Adaptive fuzzy approach,” IEEE Trans.
Fuzzy Syst., vol. 4, no. 1, pp. 32–43, Feb. 1996.
[32] H. K. Khalil, Nonlinear Systems. New York: Macmillan, 1992. [33] K. S. Tsakalis and P. A. Ioannou, Linear Time-Varying Systems.
En-glewood Cliffs, NJ: Prentice-Hall, 1993.
[34] W.-Y. Wang and Y.-H. Li, “Evolutionary learning of BMF fuzzy-neural networks using a reduced-form genetic algorithm,” IEEE Trans. Syst.
Man, Cybern. B, Cybern., vol. 33, no. 6, pp. 966–976, Dec. 2003.
[35] W. L. Tung and C. Quek, “Falcon: Neural fuzzy control and decision systems using FKP and PFKP clustering algorithms,” IEEE Trans. Syst.
Man, Cybern. B, Cybern., vol. 34, no. 1, pp. 686–695, Feb. 2004.
[36] W.-Y. Wang, C.-Y. Cheng, and Y.-G. Leu, “An on-line GA-based output-feedback direct adaptive fuzzy-neural controller for uncertain nonlinear systems,” IEEE Trans. Syst. Man, Cybern. B, Cybern., vol. 34, no. 1, pp. 334–345, Feb. 2004.
[37] S. S. Ge and J. Zhang, “Neural-network control of nonaffine nonlinear system with zero dynamics by state and output feedback,” IEEE Trans.
Neural Netw., vol. 14, no. 4, pp. 900–918, Jul. 2003.
[38] S. S. Ge and C. Wang, “Adaptive neural control of uncertain MIMO non-linear systems,” IEEE Trans. Neural Netw., vol. 15, no. 3, pp. 674–692, May 2004.
[39] Y. Li, S. Qiang, and X. Z. O. Kaynak, “Robust and adaptive backstepping control for nonlinear systems using RBF neural networks,” IEEE Trans.
Neural Netw., vol. 15, no. 3, pp. 693–701, May 2004.
[40] Q. Zhu and L. Guo, “Stable adaptive neurocontrol for nonlinear discrete-time systems,” IEEE Trans. Neural Netw., vol. 15, no. 3, pp. 653–662, May 2004.
Yih-Guang Leu received the M.S. and Ph.D. degrees
in electrical engineering from National Taiwan Uni-versity of Science and Technology, Taipei, Taiwan, R.O.C., in 1995 and 1999, respectively.
He is currently an Associate Professor in the Department of Electronics Engineering, Hwa Hsia Institute of Technology, Taipei, Taiwan, R.O.C. His current research interests and publications are in the areas of fuzzy logic control, robust adaptive control, and neural networks.
Wei-Yen Wang (M’00–SM’04) received the M.S.
and Ph.D. degrees in electrical engineering from National Taiwan University of Science and Tech-nology, Taipei, Taiwan, R.O.C., in 1990 and 1994, respectively.
Since 1990, he has served concurrently as a patent screening Member of the National Intellectual Prop-erty Office, Ministry of Economic Affairs, Taiwan. In 1994, he was appointed as Associate Professor in the Department of Electronic Engineering, St. John’s and St. Mary’s Institute of Technology, Taiwan. From 1998 to 2000, he worked in the Department of Business Mathematics, Soochow University, Taiwan. Currently, he is a Professor with the Department of Elec-tronic Engineering, Fu-Jen Catholic University, Taipei, Taiwan. His current re-search interests and publications are in the areas of fuzzy logic control, robust adaptive control, neural networks, computer-aided design, and digital control. He has authored or coauthored over 60 refereed journal and conference papers in the above areas.
Dr. Wang is an Associate Editor of the IEEE TRANSACTIONS ONSYSTEMS, MAN,ANDCYBERNETICSPARTB: CYBERNETICS.
Tsu-Tian Lee (M’87–SM’89–F’97) was born in
Taipei, Taiwan, R.O.C., in 1949. He received the B.S. degree in control engineering from the National Chiao Tung University (NCTU), Hsinchu, Taiwan, in 1970 and the M.S. and Ph.D. degrees in electrical engineering from the University of Oklahoma, Norman, in 1972 and 1975, respectively.
In 1975, he was appointed Associate Professor and in 1978 Professor and Chairman of the Department of Control Engineering, NCTU. In 1981, he became Professor and Director of the Institute of Control En-gineering, NCTU. In 1986, he was a Visiting Professor and in 1987, a Full Pro-fessor of Electrical Engineering at University of Kentucky, Lexington. In 1990, he was a Professor and Chairman of the Department of Electrical Engineering, National Taiwan University of Science and Technology (NTUST). In 1998, he became the Professor and Dean of the Office of Research and Development, NTUST. In 2000, he was with the Department of Electrical and Control En-gineering, NCTU, where he served as a Chair Professor. Since 2004, he has been with National Taipei University of Technology (NTUT), where he is now the President. He has published more than 200 refereed journal and conference papers in the areas of automatic control, robotics, fuzzy systems, and neural net-works. His current research involves motion planning, fuzzy and neural control, optimal control theory and application, and walking machines.
Dr. Lee received the Distinguished Research Award from National Science Council, R.O.C., in 1991–1992, 1993–1994, 1995–1996, and 1997–1998, respectively, the TECO Sciences and Technology Award from the TECO Foundation in 2003, the Academic Achievement Award in Engineering and Applied Science from the Ministry of Education, Republic of China, in 1998, and the National Endow Chair from Ministry of Education, Republic of China, in 2003. He is a fellow of the Institute of Electrical Engineers (IEE) and the New York Academy of Sciences (NYAS). His professional activities include serving on the Advisory Board of Division of Engineering and Applied Science, National Science Council, serving as the Program Director, Automatic Control Research Program, National Science Council, and serving as an Advisor of Ministry of Education, Taiwan, and numerous consulting positions. He has served as Member of Technical Program Committee and Member of Advisory Committee for many IEEE sponsored international conferences. He is now the Vice President for Membership, a member of the Board of Governors and the Newsletter Editor of the IEEE Systems, Man and Cybernetics Society.