Applying Snapback Repellers in Resource
Budget Models
Shu-Ming Chang
∗Hsun-Hui Chen
†Abstract
In ecology, Satake’s generalized resource budget model that modi-fied from Isagi’s resource budget model, Satake and Iwasa illustrated by computing the positive Lyapunov exponent that if the depletion coefficient is greater than one, then the system is chaotic. However, a positive Lyapunov exponent implies only sensitivity in Devaney’s chaos. Therefore, this work presents mathematical viewpoints and numerical analysis on Satake’s generalized resource budget model, to rigorously prove that the generalized resource budget model is chaotic in Devaney’s sense by using the snapback repeller theory and the topo-logical entropy theory. Moreover, this work also investigates that the behaviors are different between positive odd depletion coefficients and positive even depletion coefficients under numerical computations.
1
Introduction
Several explanations of the masting phenomenon have been proposed [3, 5, 6, 9, 10, 12, 13, 14, 15, 16, 17, 19, 20, 21, 22, 23, 32, 34, 37, 42, 43, 44]. They involve environmental fluctuations, weather conditions, swamping predators, the weight of young deer, bird populations, the reproductive success of bears, increased efficiency of wind pollination, attraction to seed distributions, cue masting, and the dispersing of animals.However, most of these hypotheses explain neither the mechanism of masting nor the mechanism by which the timing of reproduction varies among individuals [36].
∗Department of Applied Mathematics, National Chiao Tung University, Hsinchu 300,
Taiwan. Email: [email protected]
†Department of Applied Mathematics, National Chiao Tung University, Hsinchu 300,
1.1
Isagi’s Resource Budget Model
Isagi, Sugimura, Sumidaa and Ito proposed a simple model of the mechanism of masting that was based on the resource budget of an individual tree [18]. They assumed that a constant amount of photosynthate is produced by each tree annually, given that the environmental conditions are constant from year to year. Photosynthate (PS) is consumed for the growth and the maintenance
of the tree; any that is not used by the plant is stored in a pool within the tree. The amount of PS was constant from year to year. In one year when
the accumulated PS exceeded a threshold (LT), the amount of accumulated
PS minus LT was used for flowering, and is regarded as the cost of flowering
Cf. Hence, whenever the amount of photosynthate accumulated in preceding
years was large, the tree was inclined to flower more, and the amount of flowering in a year also depended on the amount of photosynthetic products that had accumulated in the previous years. The amount of accumulated
PS was decreased to LT after the flowering. The flowers were pollinated and
bore fruits at a cost of Ca. The ratio Ca/Cf was assumed to be constant
RC. After the fruiting had been completed, the amount accumulated was
LT − Ca = LT − RCCf. In the model, PS accumulates annually, until the
tree flowers again when the amount exceeds LT.
1.2
Satake’s Generalized Resource Budget Model
Let S(t) be the amount of energy reserved at the beginning of year t. If the
sum S(t) + PS is below the threshold LT, then the tree does not reproduce
and saves all of its reserved energy for the following year. If the sum exceeds
LT, then the tree uses energy for flowering. Isagi et al. [18] assumed that the
energy expenditure for flowering exactly equals the excess, S(t)+ PS − LT.
Satake and Iwasa generalized Isagi’s model [36], and the resource budget model was rewritten as
Y(t+1) = {
Y(t)+ 1 if Y(t) ≤ 0,
−κY(t)+ 1 if Y(t) > 0, t = 0, 1, . . . , (1)
where Y(0) ∈ R and κ denotes the degree of resource depletion after a
repro-ductive year divided by the excess amount of energy in reserve before that year, and is called the depletion coefficient. Notably, the quantity Y(t) is positive if and only if the tree exhibits some reproductive activity in year t.
The generalized resource budget model (1) includes only one parameter κ. It is clear that Y(t+1) goes to infinity eventually at κ < 0. On the other hand, Y(t+1) belongs in [−κ + 1, 1] as t large enough at κ ≥ 0. Satake and Iwasa [36] illustrated trajectories for three different values of κ. When
κ∈ [0, 1), Y(t+1) quickly converges to the stable equilibrium 1/(κ + 1). There
are a number of two-point cycles corresponding to different initial conditions when κ is exactly equal to 1. When κ > 1, Y(t+1) keeps fluctuating with a
chaotic time series. Further, the authors studied the model of coupling of trees and found perfectly synchronized periodic reproduction, synchronized reproduction with a chaotic time series, clustering phenomena, and chaotic reproduction of trees without synchronization over individuals.
Satake and Iwasa [36] identified chaos by computing a positive Lyapunov exponent as the depletion coefficient κ > 1. It is true [1, 35, 45, 46] that some investigations regard the positive Lyapunov exponent as the definition of chaos because sensitivity is the most important property of chaotic systems and is easily observed. However, a positive Lyapunov exponent just implies that the map has sensitive dependence on initial conditions [35, 46]. The goal here is to prove chaos by identifying density and transitivity rather than
sensitivity as in the chaos of Devaney (defined in Section 2.1).
In this paper we would like to point out that the generalized resource budget model (1) is chaotic in the sense of Devaney. This paper is organized as follows. In Section 2, we first list essential preliminaries. In Section 3, we prove the existence of the snapback repeller of the generalized resource budget model, whenever the depletion coefficient κ becomes greater than one. Numerical analysis of numerical simulations of the generalized resource budget model are presented in Section 4. Finally, a conclusion is given in Section 5.
Throughout this paper, we use that the composition of two functions is denoted by f◦g(x) = f(g(x)). The n-fold composition of f with itself recurs repeatedly in the sequel, fn, and it is denoted by fn(x) = f ◦ · · · ◦ f(x), where n is an iterative number.
2
Preliminaries
2.1
Devaney’s Chaos
The chaos of a map has been defined in several ways [24]. Although the comment “so many authors, so many definitions,” is true, a basic component of all definitions is the unpredictability of the behavior of the trajectory which is determined with some certain error. (The associated phenomenon is usually described in terms of sensitive dependence on initial conditions.) The definition of chaos of Devaney is considered herein because it is fundamental and widely accepted.
Definition 1 (Devaney’s chaos [11]). Let X be a metric space. A continuous
map f : X → X is said to be chaotic on X if
(Sensitivity) f has sensitive dependence on initial conditions, meaning that,
there exists δ > 0 such that, for any x ∈ X and any neighborhood Nx
of x, there exists y ∈ Nx and n∈ N such that |fn(x)− fn(y)| > δ;
(Density) periodic points are dense in X;
(Transitivity) f is topologically transitive. That is, for any pair of nonempty
open sets U, V ⊂ X, there exists k > 0 such that fk(U )∩ V ̸= ∅.
A chaotic map possesses three ingredients, which are: unpredictability, an element of regularity, and indecomposability. The system is unpredictable because of the sensitive dependence on initial conditions [11]. In the midst of this random behavior, however, is an element of regularity, which is exhibited by the periodic points that are dense. A chaotic system cannot be broken down or decomposed into two subsystems (two invariant open subsets) that do not interact under f because of topological transitivity.
2.2
Snapback Repellers
Generally, proving that a dynamical system has chaotic behavior is difficult. Most techniques for making such a determination involve computer simu-lations, which apply the arithmetic of the Lyapunov exponent, find a pe-riod doubling bifurcation, and perform other tasks that are associated with numerical dynamical systems. However, obtaining such results by rigorous mathematical proofs is difficult.
A dynamical system with diffeomorphism has chaotic behavior that can be proved by using known methods, such as the existence of Smale horseshoe, transversal homoclinic orbits, or heteroclinic orbits. Noninvertible maps have chaotic behavior that can be identified by the existence of snapback repellers. However, for general focus problems, applying the above methods without computer assistance is difficult. In most cases, the verification must be car-ried out with the aid of a computer [33].
In 1978, Marotto defined the snapback repeller [29]. The existence of snapback repellers is adopted to determine whether a system is chaotic.
Definition 2 ([30]). Let f : Rn → Rn be differentiable in B
r(x∗) and x∗ be
a fixed point of f with all eigenvalues of Df (x∗) exceeding 1 in norm, and
there exists a constant s > 1 such that ∥f(x) − f(y)∥ > s∥x − y∥ for all x, y ∈ Br(x∗). Suppose there exists a point x0 ∈ Br(x∗) with x0 ̸= x∗ and
some positive integer m such that fm(x
0) = x∗ and det(Dfm(x0))̸= 0. Then
x∗ is called a snapback repeller of f .
Remark
(1) In one-dimensional space R, the Jacobi matrix Df(x∗) = f′(x∗) and
det(Dfm(x0)) = (fm)′(x0)
= f′(fm−1(x0))· f′(fm−2(x0))· · · f′(f (x0))· f′(x0)
= f′(xm−1)· f′(xm−2)· · · f′(x1)· f′(x0),
where xj = fj(x0), 1≤ j ≤ m − 1.
(2) Let snapback repeller x∗, f , m, and x0 be the same as Definition 2.
x∗ is said to be a nondegenerate snapback repeller of f if there exist positive constants µ and δ0 such that Bδ0(x0) ⊂ Br0(x∗) and
∥fm(x)− fm(y)∥ ≥ µ∥x − y∥ for all x, y ∈ B
δ0(x0); x∗ is called a
regular snapback repeller of f if f (Br0(x∗)) is open and there exists
a positive constant δ∗0 such that Bδ0∗(x0)⊂ Br0(x∗) and x∗ is an interior point of fm(B
δ(x0)) for any positive constant δ ≤ δ0∗ [38, 40].
The snapback repeller in Marotto’s theorem is nondegenerate and regular.
Theorem 3 ([28, 38, 39, 40, 41]). Let snapback repeller x∗, f , m, and
x0 be the same as Definition 2. If f is C1 in some neighborhood of xj,
det(Df (xj))̸= 0, 0 ≤ j ≤ m − 1, and f has a snapback repeller x∗, then f
2.3
Topological Entropy
Topological entropy was defined by Adler, Konhein, and McAndrew for
topo-logically conjugate invariance in 1965 [2]. If the space is compact metric, then the following definition is equivalent to the definition of Adler, Konhein, and McAndrew [7], and it is more useful [4].
Definition 4 ([7, 8, 35]). Let f : X → X be a continuous map on the space
X with metric d. A set S ⊂ X is called (n, ϵ)-separated for f for n a positive integer and ϵ > 0 provided that for every pair of distinct points x, y ∈ S, x ̸= y, there is at least one k with 0 ≤ k < n such that d(fk(x), fk(y)) > ϵ.
The number of different orbits of length n (as measured by ϵ) is defined by r(n, ϵ, f ) ={#(S) : S ⊂ X is a (n, ϵ)-separated set for f },
where #(S) is the cardinality of elements in S. Let htop(ϵ, f ) = lim sup
n→∞
log(r(n, ϵ, f ))
n ,
and define the topological entropy of f as htop(f ) = lim
ϵ→0,ϵ>0htop(ϵ, f ).
Consider the continuous map on the compact interval, the relationship between positive topological entropy (htop(f ) > 0) and Devaney’s chaos is
equivalent.
Theorem 5 ([25, 26, 27, 31]). Let f be a continuous map of a compact
interval I to itself. f has positive topological entropy if and only if f is chaotic in the sense of Devaney.
The basic result following that is used to help calculate the entropy, and relates the entropy of a map f to a n-fold composition of f , fn.
Theorem 6 ([35]). Assume f : X → X is uniformly continuous or X is
3
Mathematical Analysis
In this section we will prove that the generalized resource budget model is chaotic in the sense of Devaney (defined in Definition 1) by using the pre-liminaries, the snapback repeller theory and the topological entropy theory (mentioned in Definition 2 and Definition 4).
Theorem 7. The generalized resource budget model (1) is chaotic in the
sense of Devaney when the depletion coefficient κ is greater than 1.
Proof. The generalized resource budget model (1) can be represented in a
map g,
g(x) =
{
x + 1 if x≤ 0,
−κx + 1 if x > 0, (2)
where κ is the depletion coefficient. Then we would like to prove that the map g is chaotic in the sense of Devaney when κ > 1. In this proof there are three stages. First, try to find out a snapback repeller of g. There exists the snapback repeller of g when κ > κ0 with κ0 =
1 +√5
2 ≈ 1.6180. Therefore, a result will be revealed that the map g is chaotic in the sense of Devaney as κ > κ0 by Theorem 3. Second, improve the result in the first stage to
calculate snapback repellers of g2. There exists a snapback repeller of g2when
κ > κ1 with κ1 = ( 1 2 + √ 23 108 )1/3 + ( 1 2 − √ 23 108 )1/3 ≈ 1.3247. It implies
that g2 is chaotic in the sense of Devaney as κ > κ
1 by Theorem 3. Then,
according to Theorem 5 and 6, the map g2 has positive topological entropy,
htop(g2) > 0, and htop(g2) = 2·htop(g), meaning that, htop(g) > 0. Therefore,
the map g is chaotic in the sense of Devaney as κ > κ1 by Theorem 5 again.
Finally, apply the technique in the second stage to the map g2p with p∈ N. Here, it is not easy to find out snapback repellers of g2p
. We make a recurrent formula (3) for representing the map g2p
partially in a specific interval.
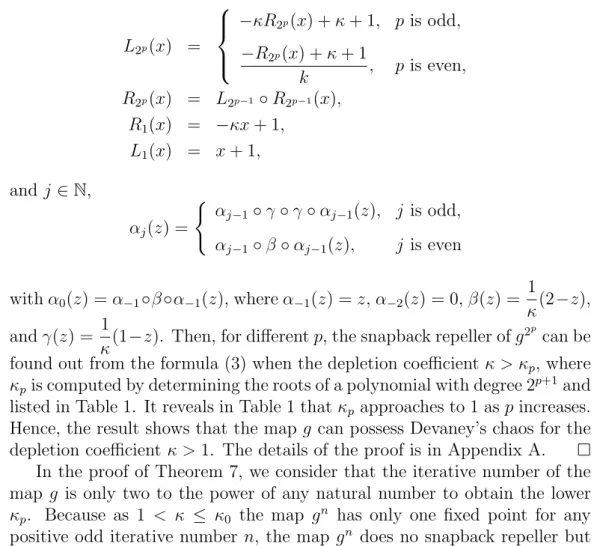
g2p(x) = L2p(x), x∈ [ αp−3 ( 1 κ ) , αp−2 ( 1 κ )] , R2p(x), x∈ [ αp−2 ( 1 κ ) , 1 ] , (3)
where L2p(x) = −κR2p(x) + κ + 1, p is odd, −R2p(x) + κ + 1 k , p is even, R2p(x) = L2p−1 ◦ R2p−1(x), R1(x) = −κx + 1, L1(x) = x + 1, and j ∈ N, αj(z) = { αj−1◦ γ ◦ γ ◦ αj−1(z), j is odd, αj−1◦ β ◦ αj−1(z), j is even with α0(z) = α−1◦β◦α−1(z), where α−1(z) = z, α−2(z) = 0, β(z) = 1 κ(2−z), and γ(z) = 1
κ(1−z). Then, for different p, the snapback repeller of g
2p
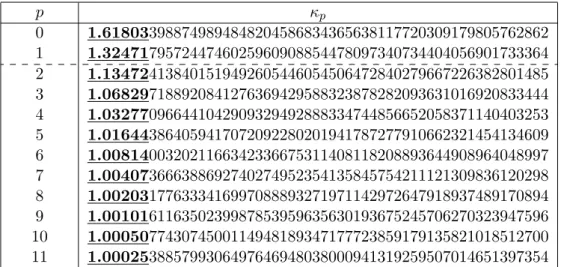
can be found out from the formula (3) when the depletion coefficient κ > κp, where
κp is computed by determining the roots of a polynomial with degree 2p+1and
listed in Table 1. It reveals in Table 1 that κp approaches to 1 as p increases.
Hence, the result shows that the map g can possess Devaney’s chaos for the depletion coefficient κ > 1. The details of the proof is in Appendix A.
In the proof of Theorem 7, we consider that the iterative number of the map g is only two to the power of any natural number to obtain the lower
κp. Because as 1 < κ ≤ κ0 the map gn has only one fixed point for any
positive odd iterative number n, the map gn does no snapback repeller but
x∗ = 1
1 + κ. At the same time, as 1 < κ≤ κ1 the map g
m has only one fixed
point for any positive even iterative number m but two to the power, the map gm does no snapback repeller but x∗∗ = 2
1 + κ. Hence, it is a unique way to obtain lower κp by finding out the snapback repeller of the map g2
p
with p∈ N.
It is fortunate for p = 0 or 1 that κ0 and κ1 can be solved exactly by
deter-mining roots of the polynomial with degree 2 and 4, respectively. However, there is no general formula to solve the roots of a polynomial with degree 2p+1 with p ≥ 2. Therefore, we use numerical computations to obtain κ
p in
digits. It has to extend the digits of the representation in computing since the degree 2p+1 of the polynomial is very large, even p is small (for example,
p = 10 and then the degree is 211= 2, 048). Further, it can be observed that the sequence {κp} converges linearly to κ∞ = 1 at a rate of convergence of
lim p→∞ κp+1− κ∞ κp− κ∞ = 1 2.
This section mathematically interprets that the generalized resource bud-get model (1) is chaotic in the sense of Devaney in Theorem 7 when the depletion coefficient κ > 1. The next section will analyze the generalized resource budget model in numerical simulations under a computer.
4
Numerical Simulations
The bifurcation diagram (Figure 1) of the generalized resource budget model (1) with iterations given by the same random initial condition for the different depletion coefficient κ from 1 to 5 that Theorem 7 yielded rigorous mathe-matical results to show that the model is chaotic in the sense of Devaney. However, it eventually converges to a period cycle in Figure 1 when the de-pletion coefficient κ is a positive even number. This is a strange result. From the derivate of the map (2) we knew that the period cycle is unstable. In act, that is true, and we will prove it later in Theorem 9.
Theorem 8. For any initial value Y(0) ∈ Q and the depletion coefficient
κ ∈ N, then the behavior of the generalized resource budget model (1) is a period cycle eventually.
Proof. Without loss of generality, the initial value Y(0) ∈ Q ∩ [−κ+1, 1]. Let Y(0) = n
m ∈ Q with m ∈ N and n ∈ Z. Let S =
{ j m ∈ [−κ + 1, 1] : j ∈ Z } , then Y(0) ∈ S. Y(1) = j m + 1 = j + m m , if Y (0) ∈ [−κ + 1, 0], (−κ)j m + 1 = (−κ)j + m m , if Y (0) ∈ (0, 1],
it implies that Y(1) ∈ S and Y(t) ∈ S, t = 2, 3, . . .. Let S
1 be a set,
{Y(0), Y(1)Y(2), . . . , Y(κm+1)}, then S
by |S|, and |S| = { j m ∈ [−κ + 1, 1] : j ∈ Z } = κm + 1.
Since S1 ⊆ S and |S| = κm + 1, |S1| ≤ |S| and there exists Y(i) ∈ S for
some i such that Y(i) = Y(κm+1) derived from the Pigeonhole Principle. It implies that Y(t) always is a period cycle of period at most κm + 1− i for
any rational initial value and the depletion coefficient κ∈ N.
Further, there is no doubt that Y(0) can only be expressed using finite
digits in binary representation in a computer. Therefore, for any simulation in the computer, the initial value is always a rational number such that the behavior of the generalized resource budget model (1) eventually goes a period cycle when the depletion coefficient κ∈ N. In fact, when the depletion coefficients κ are 2 and 4, these behaviors only converge to period cycles of period 3 and period 5 (see in Figure 1), respectively. Satake and Iwasa explained these phenomenon [36] as follows, if κ is exactly the same as an
integer, after a long transient the trajectory suddenly becomes a period cycle of period κ + 1; this pathological behavior would not be realized in real forest because there is always some noise.
However, pathological behaviors are totally different in positive even de-pletion coefficients and positive odd dede-pletion coefficients. In Figure 1, Y(t)
indeed converges to a period cycle of period κ + 1 and the period cycle is
{−κ + 1, . . . , 0, 1} when κ is a positive even number (see Figure 2 (a) & (c)).
This means that an even number under a computer’s binary representation lets any initial value Y(0) to carry that it converges to a “lower” period cycle.
But, the behavior is not like “lower” periodic when κ is a positive odd num-ber (also see Figure 2 (b) & (d)). Next, we will propose well explanations in Theorem 9 and Theorem 10 for κ as a positive even number and a positive odd number, respectively.
Theorem 9. Under a binary representation of finite digits, if the depletion
coefficient κ is a positive even number, then the behavior of the generalized resource budget model converges to a period cycle {−κ + 1, −κ + 2, . . . , 0, 1} of period κ + 1.
Proof. According to the result in Theorem 8, the behavior of the generalized
resource budget model always converges to a period cycle of period at most
κm+1 with Y(t) = n
m ∈ [0, 1] for some t and n, m ∈ N. Here, n
in the binary representation of ℓ finite digits. It implies that m has to be 2i for i ∈ {0, 1, 2, . . . , ℓ} and the period is at most κ2i + 1. Since κ is a positive even number, Y(t+1) = −κY(t) + 1 should be n1
m1 with n1 ∈ Z and
m1 = 2i−1 such that the behavior of Y(t+1) converges to a period cycle of
period at most κ2i−1 + 1. Again, the period κ2i−1 + 1 will be reduced to
κ + 1 in finite iterations. Hence, we completely understand that the behavior
of the generalized resource budget model eventually converges to the period cycle{−κ + 1, −κ + 2, . . . , 0, 1} of period κ + 1 under a binary representation of finite digits when the depletion coefficient κ is a positive even number. The details of the proof is in Appendix B.
It is a key point that under a binary representation a number can be represented in finite digits or not. For example, under the binary repre-sentation 0.2 = 0.0011 cannot be represented in finite digits. In fact, the behavior of Y(t) is a period cycle {0.2, 0.6, −0.2, 0.8, −0.6, 0.4} of period 6
when Y(0) = 0.2 and κ = 2, not {−1, 0, 1}.
However, when the depletion coefficient κ is a positive odd number, the following theorem explains that the behavior of Y(t) is totally different to the
positive even depletion coefficient.
Theorem 10. Under a binary representation of finite digits, if the depletion
coefficient κ is a positive odd number, then the behavior of the generalized resource budget model cannot converge to the period cycle {−κ + 1, −κ +
2, . . . , 0, 1} for almost all the initial values.
Proof. Although the behavior of the generalized resource budget model
con-verges to a period cycle of period at most κµ + 1 with Y(τ ) = ν
µ ∈ [0, 1]
for some τ and ν, µ ∈ N by the result in Theorem 8, under the binary rep-resentation of finite digits the behaviors of Y(t) are very different in a even
κ and a odd κ. There is no chance to reduce the period κµ + 1 as κ is a
positive odd number for almost all the initial values. The details of the proof is in Appendix C.
5
Conclusions
Satake and Iwasa proved that the generalized budget resource model is chaotic when κ > 1 by computing the Lyapunov exponent [36]. A map pos-sesses a positive Lyapunov exponent that implies only sensitive dependence on initial conditions. Although this result is very important and useful (it
enables a single quantity to be computed to determine whether the process is highly sensitive to initial conditions [35, 46]), it is just one of the necessary conditions in the definition of Devaney’s chaos. In this paper we clearly point out that the generalized resource budget model is chaotic in the sense of De-vaney as the depletion coefficient κ > 1 by the relationship among DeDe-vaney’s chaos, the topological entropy and the snapback repeller.
At the same time, it is completely understood that computational sim-ulations cause a lower period-(κ + 1) cycle when the depletion coefficient κ is a positive even number. Further, all the trajectories will converge to pe-riodic cycles when the initial value is a rational number and the depletion coefficient is a natural number. Based on these results of the generalized resource budget model for describing the growth of an individual tree, we will continue studying the model of coupling of trees in future.
Acknowledgments
The authors would like to thank the National Science Council of the Repub-lic of China, Taiwan, the National Center for Theoretical Sciences, and the Center of Mathematical Modeling and Scientific Computing (National Chiao Tung University in Taiwan) for partially supporting this research. Ted Knoy is appreciated for his editorial assistance. The authors wish to thank Pro-fessor Sze-Bi Hsu and ProPro-fessor Yu-Yun Chen for initiatively providing some associated materials in this paper. We would like to thank anonymous re-viewers and the editor for their comments.
References
[1] H. D. I. Abarbanel, R. Brown, and P. Bryant. Computing the Lyapunov spectrum of a dynamical system from an observed time series. Physical
Review A, 43(6):2787–2806, 1991.
[2] R. L. Adler, A. G. Konheim, and M. H. McAndrew. Topological en-tropy. Transactions of the American Mathematical Society, 114(2):309– 319, 1965.
[3] R. B. Allen and H. H. Platt. Annual seedfall variation in Nothofagus solandri (Fagaceae), New Zealand. Oikos, 57:199–206, 1990.
[4] L. Alseda, S. L. Kolyada, J. Llibre, and L. Snoha. Entropy and periodic points for transitive maps. Transactions of the American Mathematical
Society, 351(4):1551–1573, 1999.
[5] S. Appanah. General flowering in the climax rain forests of South-east Asia. J. Trop. Ecol., 1:225–240, 1985.
[6] P. S. Ashton, T. J. Givnish, and S. Appanah. Staggered flowering in the Dipterocarpaceae: new insights into floral induction and the evolution of mast fruiting in the aseasonal tropics. Am. Nat., 132:44–66, 1988. [7] R. Bowen. Entropy for group endomorphisms and homogeneous spaces.
Transactions of the American Mathematical Society, 153:401–414, 1971.
[8] M. Brin and G. Stuck. Introduction to dynamical systems. Cambridge University Press, New York, 2002.
[9] K. M. Christensen and T. G. Whitham. Indirect herbivore mediation of avian seed dispersal in pinyon pine. Ecology, 72:534–542, 1991.
[10] R. T. Corlett. Flora and reproductive phenology of the rain forest at Bukit Timah, Singapore. J. Trop. Ecol., 6:55–63, 1990.
[11] R. L. Devaney. An Introduction to Chaotic Dynamical Systems, Second
Edition. Addison-Wesley, Redwood City, Canada, 1989.
[12] K. D. Elowe and W. E. Dodge. Factors affecting black bear reproductive success and cub survival. J. Wildl. Manage., 53:962–968, 1989.
[13] G. A. Felhammer, T. P. Kilbane, and D. W. Sharp. Cumulative effect of winter on acorn yield and deer body weight. J. Wildl. Manage., 53:292–295, 1989.
[14] P. P. Feret, R. E. Dreh, S. A. Merkle, and R. G. Oderwald. Flower abundance, premature acorn abscission, and acorn production in Quer-cus alba L. Botanical Gazette, 143(2):216–218, 1982.
[15] L. W. Gysel. A 10-year analysis of beechnut production and use in Michigan. J. Wildl. Manag., 35:516–519, 1971.
[16] R. A. Ims. The ecology and evolution of reproductive synchrony. Trends
[17] R. A. Ims. On the adaptive value of reproductive synchrony as a predator-swamping strategy. Am. Nat., 136:485–498, 1990.
[18] Y. Isagi, K. Sugimura, A. Sumida, and H. Ito. How does masting happen and synchronize? J. theor. Biol., 187:231–239, 1997.
[19] D. H. Janzen. Seed predation by animals. Ann. Rev. Ecol. Syst., 2:465– 492, 1971.
[20] D. H. Janzen. Why bamboos wait so long to flower. Ann. Rev. Ecol.
Syst., 7:347–391, 1976.
[21] H. Kawada and K. Maruyama. Effects of seed bearing of a natural beech (Fagus crenata Blume) forest on amount of litter fall and its nutrients.
Jpn. J. Ecol., 36:3–10, 1986.
[22] D. Kelly. The evolutionary ecology of mast seeding. Trends Ecol. Evol., 9:465–471, 1994.
[23] W. D. Koenig, R. L. Mumme, W. J. Carmen, and M. T. Stanback. Acorn production by oaks in Central Coastal California: variation within and among years. Ecology, 75:99–109, 1994.
[24] S. F. Kolyada. Li-Yorke sensitivity and other concepts of chaos.
Ukrainian Mathematical Journal, 56(8):1242–1257, 2004.
[25] D. Kwietniak and M. Misiurewicz. Exact devaney chaos and entropy.
Qualitative Theory Dynamical Systems, 6(95):169–179, 2005.
[26] C. Li and G. Chen. Estimating the Lyapunov exponents of discrete systems. Chaos: An Interdisciplinary Journal of Nonlinear Science,
14(2):343–346, 2004.
[27] S. Li. ω-chaos and topological entropy. Transactions of the American
Mathematical Society, 339(1):243–249, 1993.
[28] Z. Li, Y. Shi, and W. Liang. Discrete chaos induced by heteroclinic cycles connecting repellers in Banach spaces. Nonlinear Analysis, 72(2):757– 770, 2010.
[29] F. R. Marotto. Snap-back repellers imply chaos in Rn. J. Math. Anal.
[30] F. R. Marotto. On redefining a snap-back repeller. Chaos, Solitons and
Fractals, 25:25–28, 2005.
[31] M. Misiurewicz. Horseshoes for mappings of the interval. Bull. Acad.
Polo. Sci. Ser. Sci. Math., 27:167–169, 1979.
[32] D. A. Norton and D. Kelly. Mast seeding over 33 years by Dacrydium cupressinum Lamb. (rimu) (podocarpaceae) in New Zealand: the im-portance of economies of scale. Func. Ecol., 2:399–408, 1988.
[33] C. C. Peng. Numerical computation of orbits and rigorous verification of existence of snapback repellers. Chaos, 17:013107, 2007.
[34] G. E. Rehfeldt, A. R. Stage, and R. T. Bingham. Strobili development in western white pine: productivity, prediction, and association with water. For. Sci., 17:454–461, 1971.
[35] C. Robinson. Dynamical Systems: Stability, Symbolic Dynamics, and
Chaos, Second Edition. CRC, Boca Raton, Florida, 1998.
[36] A. Satake and Y. Iwasa. Pollen coupling of forest trees: Forming syn-chronized and periodic reproduction out of chaos. J. theor. Biol., 203:63– 84, 2000.
[37] W. M. Sharp and V. G. Sprague. Flowering and fruiting in the white oaks. Pistillate flowering, acorn development, weather, and yields.
Ecol-ogy, 48:243–251, 1967.
[38] Y. Shi and G. Chen. Chaos of discrete dynamical systems in complete metric spaces. Chaos, Solitons and Fractals, 22:555–571, 2004.
[39] Y. Shi and G. Chen. Discrete chaos in Banach spaces. Science in China
Ser. A Mathematics, 48(2):222–238, 2005.
[40] Y. Shi and P. Yu. Chaos induced by regular snap-back repellers. J.
Math. Anal. Appl., 337:1480–1494, 2008.
[41] Y. Shi, P. Yu, and G. Chen. Chaotification of discrete dynamical systems in Banach spaces. Internat. J. Bifur. Chaos, 16:2615–2636, 2006. [42] J. W. Silvertown. The evolutionary ecology of mast seeding in trees.
[43] C. C. Smith, J. L. Hamrick, and C. L. Kramer. The advantage of mast years for wind pollination. Am. Nat., 136:154–166, 1990.
[44] V. L. Sork, J. Bramble, and O. Sexton. Ecology of mast-fruiting in three species of North American deciduous oaks. Ecology, 74:528–541, 1993. [45] A. Wolf, J. B. Swift, H. L. Swinney, and J. A. Vastano. Determining
Lyapunov exponents from a time series. Physica, 16D:285–317, 1985. [46] Rodney C. L. Wolff. Local Lyapunov exponents: Looking closely at
chaos. Journal of the Royal Statistical Society. Series B
(Methodologi-cal), 54(2):353–371, 1992.
Appendix A
The proof of Theorem 7
Suppose κ > 1. First, x∗ = 1
1 + κ is a fixed point of the map g in (2) with
|g′(x∗)| = κ exceeding 1 (|g′(x)| = κ as x ∈ (0, 1)). Try to find out x
0 ∈ (0, 1)
such that g2(x0) = x∗. Then, x0 =
2κ + 1
κ2+ κ and x0 < 1, thus,
2κ + 1
κ2+ κ < 1 is
a necessary condition. It implies that as κ > 1 +
√
5
2 there exists a positive integer m = 2 such that gm(x
0) = x∗ and det (Dg2(x0)) = g′(x1)· g′(x0)̸= 0,
where x1 = g(x0). Therefore, x∗ is a snapback repeller of g as κ > κ0 =
1 +√5
2 . Hence, the map g is chaotic in the sense of Devaney as κ > κ0 by Theorem 3. Second, x∗∗ = 2 1 + κ is a fixed point of g 2 with |Dg2(x∗∗)| = κ exceeding 1. Here, |Dg2(x)| = κ as x ∈ ( 1 κ, 1 )
. Let h = g2 and be restricted in the domain [0, 1]. It means that
h(x) = κ2x− κ + 1, x ∈ [ 0, 1 κ ] , −κx + 2, x∈ [ 1 κ, 1 ] ,
Try to find out x0 ∈
(1
κ, 1
)
such that h2(x0) = x∗∗. Then, x0 =
2κ3+ κ2− 1
κ3(1 + κ)
and x0 < 1, thus,
2κ3+ κ2− 1
κ3(1 + κ) < 1 is a necessary condition. It implies that
as κ > ( 1 2 + √ 23 108 )1/3 + ( 1 2 − √ 23 108 )1/3
there exists a positive integer
m = 2 such that hm(x
0) = x∗∗ and det (Dh2(x0)) = h′(x1)· h′(x0) ̸= 0,
where x1 = h(x0). Therefore, x∗∗ is a snapback repeller of g2 as κ > κ1 =
( 1 2 + √ 23 108 )1/3 + ( 1 2 − √ 23 108 )1/3
. It shows that g2 is chaotic in the sense
of Devaney as κ > κ1 by Theorem 3. Then, according to Theorem 5 and
6, the map g2 has positive topological entropy, htop(g2) > 0, and htop(g2) =
2· htop(g), meaning that, htop(g) > 0. Hence, the map g is chaotic in the
sense of Devaney as κ > κ1 by Theorem 5 again.
Finally, we focus on the map g2p restricted in the domain Ip = [δ(κ), 1]
with 0 < δ(κ) < 1 for p ∈ N. For different p, the map g2p
defined in Ip is represented in (3). g2p(x) = L2p(x), x∈ [ αp−3 ( 1 κ ) , αp−2 ( 1 κ )] , R2p(x), x∈ [ αp−2 ( 1 κ ) , 1 ] , where L2p(x) = −κR2p(x) + κ + 1, p is odd, −R2p(x) + κ + 1 k , p is even, R2p(x) = L2p−1 ◦ R2p−1(x), R1(x) = −κx + 1, L1(x) = x + 1, and j ∈ N, αj(z) = { αj−1◦ γ ◦ γ ◦ αj−1(z), j is odd, αj−1◦ β ◦ αj−1(z), j is even
with α0(z) = α−1◦β◦α−1(z), where α−1(z) = z, α−2(z) = 0, β(z) = 1 κ(2−z), and γ(z) = 1 κ(1− z). Then, Ip = [ αp−3 ( 1 κ ) , 1 ]
, and we can obtain a fixed point xp of g2p in ( αp−2 ( 1 κ ) , 1 ) ⊂ Ip and check |Dg2 p (x)| > 1 as x ∈ ( αp−2 ( 1 κ ) , 1 ) . Try to find out x0 ∈ ( αp−2 ( 1 κ ) , 1 ) such that g2p ◦ g2p(x
0) = xp. Thus, there exists x0 under a necessary
condi-tion κ > κp, where κp is determined by a root of a polynomial with degree
2p+1. Let x 1 = Dg2 p (x0), then x1 ∈ ( αp−3 ( 1 κ ) , αp−2 ( 1 κ )) . At the same time, the derivates of L2p(x) and R2p(x) are not equal to zeros on the
do-main ( αp−3 ( 1 κ ) , αp−2 ( 1 κ )) and ( αp−2 ( 1 κ ) , 1 ) , respectively. Hence, det(D(g2p◦ g2p)(x0) ) = Dg2p(x1)· Dg2 p (x0) ̸= 0. It implies that xp is a
snapback repeller of g2p as κ > κp and g2
p
is chaotic in the sense of De-vaney as κ > κp by Theorem 3. According to Theorem 5 and 6, the map g2
p
has positive topological entropy, htop(g2 p
) > 0, and htop(g2 p
) = 2p · htop(g),
meaning that, htop(g) > 0. It shows that the map g is chaotic in the sense
of Devaney as κ > κp by Theorem 5 again. In Table 1 that κp approaches
to 1 as p increases. Hence, the map g can possess Devaney’s chaos for the depletion coefficient κ > 1.
Appendix B
The proof of Theroem 9
Under a binary representation with ℓ valid digits (ℓ ∈ N), for any non-integer number y > 0, it can be represented in 0.e1e2· · · eαd1d2· · · dβ or
e1e2· · · eα.d1d2· · · dβ for some positive integers α, β, with α + β ≥ ℓ, where
ei ∈ {0, 1}, i = 1, . . . , α and dj ∈ {0, 1}, j = 1, . . . , β. Then, κy will
be represented in ˜e1e˜2· · · ˜eα˜. ˜d2d˜3· · · ˜dβ or ˜e1e˜2· · · ˜eα˜.ˆe2eˆ3· · · ˆeαd˜1d˜2· · · ˜dβ for
some positive integer ˜α, with ˜α + α + β ≥ ℓ, where ˜ei ∈ {0, 1}, i = 1, . . . , ˜α,
˜
dj ∈ {0, 1}, j = 1, . . . , β and ˆek ∈ {0, 1}, k = 2, . . . , α, under the binary
representation of ℓ valid digits, since κ is a positive even number. It means that the number of nonzero digits at right hand side of the point will reduce at less one after to multiply κ as κ is a positive even number. The result is true even if y < 0. Further, the operation (plus one) does not effect the
number of nonzero digits at the right hand side of the point. Therefore, in the generalized resource budget model (1) with the positive even depletion coefficient κ, without loss of generalilty, for any initial value Y(0) ∈ (0, 1), the number of nonzero digits at the right hand side of the point of κY(0) has
to be less one or more than Y(0). It shows that nonzero digits at the right
hand side of the point of Y(t) will disappear when t is large enough (after to multiply κ ℓ times at most), meaning that the behavior of Y(t) goes to a
period cycles {−κ + 1, −κ + 2, . . . , 0, 1} of period κ + 1 in finite iterations.
Appendix C
The proof of Theroem 10
Under a binary representation with ℓ valid digits (ℓ ∈ N and ℓ > 3), for y ∈ (0, 1), let y = 0.d1d2· · · dβ with 1≤ β ≤ ℓ/2 and di ∈ {0, 1}, i = 1, . . . , β but
not all zeros. Assume that κ is lower than or equal to 2ℓ/2 and dβ = 1. Then,
Under the binary representation with ℓ valid digits κy will be represented in
e1e2· · · eα. ˜d1d˜2· · · ˜dβ−1dβ with 1≤ α ≤ ℓ/2 for some positive integer α, where
ei ∈ {0, 1}, i = 1, . . . , α, and ˜dj ∈ {0, 1}, j = 1, . . . , β − 1. It means that
the number of nonzero digits at right hand side of the point will not change after to multiply κ. The result is true even if y < 0. Further, the operation (plus one) does not effect the number of nonzero digits at the right hand side of the point. In fact, the number of valid digits in a computer is not so short that only some y satisfy the above result. Therefore, in the generalized resource budget model (1) with the positive odd depletion coefficient κ (not so large), the number of nonzero digits at the right hand side of the point of
κY(0) will not be less than Y(0) for almost all initial values Y(0) ∈ (0, 1). It
shows that nonzero digits at the right hand side of the point of Y(t) will no disappear for all t, meaning that the behavior of Y(t) cannot go to a period
p κp 0 1.618033988749894848204586834365638117720309179805762862 1 1.324717957244746025960908854478097340734404056901733364 2 1.134724138401519492605446054506472840279667226382801485 3 1.068297188920841276369429588323878282093631016920833444 4 1.032770966441042909329492888334744856652058371140403253 5 1.016443864059417072092280201941787277910662321454134609 6 1.008140032021166342336675311408118208893644908964048997 7 1.004073666388692740274952354135845754211121309836120298 8 1.002031776333416997088893271971142972647918937489170894 9 1.001016116350239987853959635630193675245706270323947596 10 1.000507743074500114948189347177723859179135821018512700 11 1.000253885799306497646948038000941319259507014651397354
Table 1: κpis computed by determining the roots of a polynomial with degree
2p+1 in Maple 12 with the representation extended to 100 digits. κ0 and
κ1 are listed above dotted line and solved exactly by the formulas of solving
roots in polynomials with the degree 2 and 4, respectively. However, there is no formula to solve exactly of a polynomial with the degree 2p+1 for p≥ 2.
1.5 2 2.5 3 3.5 4 4.5 5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 κ Y (t)
Figure 1: The bifurcation diagram of an individual tree. The horizontal axis represents the depletion coefficient κ, and the vertical axis represents Y(t) for
0 100 200 300 400 500 600 700 800 900 1000 −2 −1.5 −1 −0.5 0 0.5 1 (a) 0 500 1000 1500 2000 2500 3000 −2 −1.5 −1 −0.5 0 0.5 1 (b) 0 500 1000 1500 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 (c) 0 500 1000 1500 2000 2500 3000 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 (d)
Figure 2: For the depletion coefficient κ is a positive even number ((a) κ = 2 and (c) κ = 4) or not ((b) κ = 3 and (d) κ = 5), the generalized resource budget model Y(t) converges to a lower period cycle of period κ + 1 or not.