Dear Hsueh-Chun Lin , Paper ID : P0411
Paper Title : A Preliminary Activity Recognition of WSN Data on Ubiquitous Health Care for Physical Therapy Congratulations! We are pleased to inform you that your above paper has been accepted for presentation at 2011 International Conference on Data Engineering and Internet Technology (DEIT 2011) to be held 15-17 March 2011, Bali, Indonesia. After you complete the requirements below, your paper will appear in conference proceedings and will be indexed by both EI Compendex and ISTP, as well as included in the IEEE Xplore.
In order for your paper to be included in the proceedings indexed by Ei Compendex/ISTP, it is important that you closely follow each and every instruction below, as the acceptance is conditional on your accurate and timely reactions:
1. Revise your paper, appropriately addressing the reviewer comments (at the end of this email, if any) which are intended to help you improve your paper for final publication.
2. Strictly follow the IEEE format requirements (Create IEEE PDF eXpress account by going to: www.pdf-express.org and using Conference ID: deit11xp); incorrectly formatted papers cannot be published or indexed. Please refer to the conference website www.irast.org/conferences/DEIT/2011/Submissions.html for detailed formatting instructions and templates. Please do a thorough spelling check, e.g., by using the spelling tool in Microsoft Word. Closely follow the instructions at the conference website (Submission page) to convert your paper to IEEE Xplore-compliant pdf file using PDF eXpress and
l d fi l d f ll ibl b l b i i l k
upload your final camera-ready full paper as soon as possible, but latest by 14 January 2011. It is crucial to make sure your pdf file is IEEE Xplore-compliant using PDF eXpress. Otherwise your paper may not be included in the IEEE Xplore or indexed in EI/ISTP. Please also submit the IEEE Copyright form during your final paper submission.
3. Each paper must have 1 dedicated registration with full payment received by 14 January 2011 for the paper to be included in the proceedings (Please refer to the conference website regarding the details on registration fees. Multiple papers will require multiple registration fees.) Carefully observe the length limit of 4 pages for each paper. Extra pages beyond 4 pages will incur extra page fees. These payments must also be received by 14 January 2011 for the paper to be i l d d i th di
included in the proceedings.
4. You may pay with a credit card through the secure link provided by Paypal.com available at the conference website registration page.
If any of the above requirements are not met by the deadlines, your paper cannot be included in the conference proceedings or the conference program. Your kind cooperation will be greatly appreciated.
Thank you for choosing DEIT conferences to present your research results and we look forward to seeing you in Bali, Indonesia, 15-17 March 2011. We also hope that you will submit your excellent work to future DEIT conferences (further details will be announced later)
details will be announced later) Yours sincerely,
Program Chairs, DEIT 2011
http://irast.org/conferences/DEIT/2011/
IRAST
47-47 36th Street Suite 33427
Long Island City, NY 11101
[email protected] www.irast.org www.irast.net
A Preliminary Activity Recognition of WSN Data on
Ubiquitous Health Care for Physical Therapy
S.-Y. Chiang
Department of Information and Telecommunications Engineering
Ming Chuan University Gui-Shan, Taoyuan 333, Taiwan
Y.-C. Tu
Department of Information and Telecommunications Engineering
Ming Chuan University Gui-Shan, Taoyuan 333, Taiwan
Y.-C. Kan
Department of Communications Engineering Yuan Ze University
Chung-Li, Tao-Yuan 32003, Taiwan
H.-C. Lin
Department of Health Risk Management China Medical University
Taichung 40402, Taiwan
Abstract—The physical therapy with ubiquitous health care
(UHC) for geriatrics training or stroke patients requires continuous and routine rehabilitation during the cure period. The physiatrists are hereby the feedback clinical record to design necessary assistant programs. The successful treatment usually concerns whether the patients follow the therapeutic assignment without interruption. This study hence developed a set of wireless sensor network (WSN) devices including the accelerometer and gyroscope to measure the essential movement of human body. At this initial stage, the sensor data of static and dynamic postures for lying, sitting, standing, walking, and running were calibrated by the fuzzy algorithm with an overall accuracy rate of 99.33%. The approach may support for monitoring patient’s remedy process at home for ubiquitous health care of physical therapy.
Keywords-UHC; WSN; Accelerometer, Gyroscope; Activity Recognition
I. INTRODUCTION
The motion detection is one of the most important issues of the health care system, particular for monitoring daily activity. Based on the physical therapy and medicine, the stroke patients usually need to continuously and routinely repeat specific motions during the remedy period of the rehabilitation treatment. If the physiatrists can acquire the rehabilitation records of patients during the cure process through the ubiquitous health care (or u-healthcare) with ambulatory measurement, it is helpful to design necessary assistant programs. The activity recognition hence can be a potential technique to achieve this scope.
The regular postures of human beings essentially include lying, sitting, standing, and so on. According to different circumstance, these activities can be caught and recognized by appropriate algorithms [1]. In general, the methods of image [2] and non-image [3][4] processing are the most popular categories to monitor the postures and motions of human body. However, as considering the privacy of people,
the cost of equipments, and convenience in an open environment, it is more reasonable to adopt the modern technology for the u-healthcare. The concept of u-healthcare is extended from the homecare personal area network that provides intelligent monitoring with ad hoc network. With the multi-tier telemedicine system due to the wireless body area network, the real-time analysis of sensors’ data was performed by computer-assisted rehabilitation. Thus the ambulatory monitoring was available to generate warnings on the user's state, level of activity, and environmental conditions [5].
In the past decade, the wireless sensor network (WSN) has been widely spread out for different types of healthcare. It detects various vital signals such as blood pressure, impulse, motion as well as variation of home environment [6][7]. Many studies approved this technique on a variety of home healthcare systems since it provides wearable, portable, and mobile functionalities for usage to ubiquitously combine patients’ healthcare information with clinical data in hospital [8]. For this approach to the physiotherapy and rehabilitation, it is helpful to measure patients’ motions by creating a pattern library of WSN data for activity recognition.
In this study, we developed the wearable sensor by integrating the accelerometer and the gyroscope with the WSN devices to detect the signals of body movements. The preliminary measurement was designed by locating the sensors on the chest and the left thigh to transport data. The fuzzy algorithm was applied for advanced data recognition.
II. WSNDEVICE DESIGN
One of the primary tasks of the u-healthcare for physical therapy is assisting physiatrists to record patients’ rehabilitation data continuously for tracking their essential motions during the cure period. It usually includes lying, sitting, standing, walking, and running which imply the spatial movement of specific body part. A gyroscope is a device for measuring orientation, based on the principles of conservation of angular momentum. With modern operating
procedures of micro-electro-mechanical system (MEMS), the microchip-packaged gyroscope is found in consumer electronic devices to detect any orientation sensitively. In the other hand, an accelerometer is to measure proper acceleration that is experienced relative to freefall. Its single- and multi-axis models are available to detect magnitude and direction of the acceleration as a vector quantity. Therefore, by integrating the WSN technique for data transportation, both of the MEMS devices could make the ambulatory measurement possible to approve the u-healthcare for physical therapy.
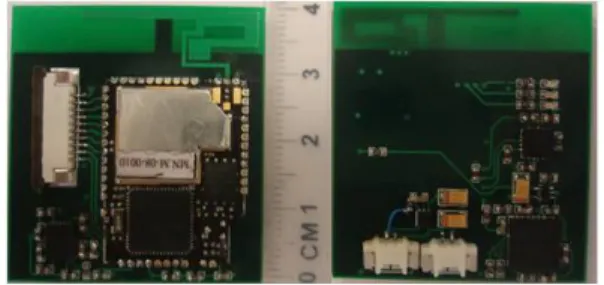
The proposed WSN sensors are designed by remodeling the MEMS modules of the accelerometer and gyroscope with the WSN mote and antenna to transport the signals. The practical devices in this study include (1) a battery-powered mote shown in Fig 1(a), which supports embedded micro control unit (MCU) and radio frequency (RF) for processing and delivering the sensed signals; (2) a triaxial accelerometer and a biaxial gyroscope shown in Fig 1(b), which can detect kinetic acceleration and angular velocity, respectively; and, in addition, a flash memory card which can temporarily store the sensed data. The models of devices are listed in Table 1.
TABLE I. THE MODELS OF WSN SENSOR DEVICES
Herein, the adopted accelerometer can detect acceleration within the range of ±3.6g with error in ±0.3% while it supports 350mA of current with sensitivity in 300mV/g for 3V of output voltage, in which g is the gravity(=9.81m/sec2). As the sensor works, the mote reads and transfers analog signals as analog-to-digital conversion (ADC) counts before writing into the transportable packet.
Figure 1. (a) WSN mote, (b) Accelerometer and gyroscope modules III. MEASUREMENT METHOD
In this study, we implemented two sets of WSN sensors for measuring desired body motions. As shown in Fig 2, the sensor A and B are fixed at the chest and the left thigh, respectively, in which the forward or backward direction is defined as z axis while the up-down and right-left directions represent x and y axes, respectively. Herein, several features are extracted for each of the six data streams (x, y, and z acceleration, x, y, and z angular speed).
Figure 2. Location of the sensors at body and relationship of tilt angles A. Feature Extraction
(1) Acceleration: includes gx, gy, and gz acceleration amplitude in gravity of x-, y-, and z-axis, respectively. (2) Angular velocity: involves angular velocities of x-,
y-, and z-axis, respectively.
(3) Tilt angle: represents the angle between x and z components of the acceleration vector (gx, gy, gz) in gravity can be calculated by θ=tan-1(g
z/gx)(180/π). (4) Mean value:determines the average value (μ) of the
number (n) of acceleration components (xi) in gravity during one second.
(5) Standard Deviation: performs the probability density function (PDF) of probability versus ADC count of the sensed data. The data distribution returns random variables since a range of output voltage might be mapped to the same gravity component as a more-to-one relationship. The PDF can be carried out by
2 1 n 1 i 2 i- ) (x n 1 ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ =
∑
= μ σ (1)Therefore, this feature includes σX, σY, and σZ that represent the standard deviation of acceleration in gravity x, y, and z-axis, respectively.
B. Evaluation of Acceleration
The WSN data of acceleration components sent by the sensors must be calibrated before the device is worn for measuring individual body posture. We hence evaluated these components due to lying, sitting, standing, walking, and running through an initial test.
C. Application of Fuzzy Algorithm
In this study, we apply the fuzzy algorithm to calibrate measured data. During the procedure, the acceleration per second was firstly classified into fuzzy sets and became the input feature of fuzzy system. Then, after fuzzification, we induced the fuzzy rules with the activity recognition pattern library. Consequently, with defuzzification, we could obtain the output of static postures or dynamic motions and store in the database.
Device Module Model No. Manufacturer MCU MSP430 Texas Industry Co.
RF CC2420 Texas Industry Co. Mote Tmote Mini Moteive Inc. Triaxial Accelerometer ADXL330 Analog Device Co.
IV. WSNDATA CALIBRATION AND ACTIVITY RECOGNITION
According to the sensed data, we extract the reasonable input features like μZ_B, σY_B, θA, θB and ωX_B as well as the desired output postures (e.g., lying, sitting and standing) and motions (e.g., walking and running).
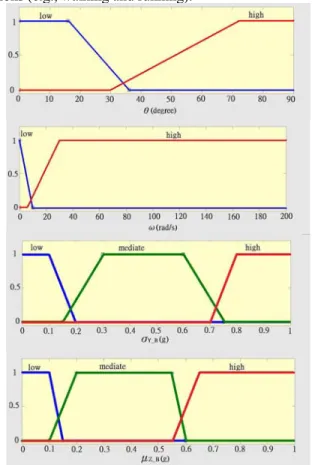
Figure 3. (From up to down) Membership function of (a) tilt angle, (b) angular velocity, (c) the standard varience of the probability density function due to measured acceleration components in gravity, (d) the mean
value of measured acceleration components in gravity A. Fuzzy Rules for Calibration
1) θA
The feature θA is defined by the angle between x and z axes and can be detected by the sensor A. Each set of the sensed θA data was collected per second to yield Gaussian distribution in which the peak value can be adopted as the input features of the fuzzy system. As shown in Fig 3a, we define two membership functions within the range from 0o to 36o as the low-angle and above 36o as the high-angle.
2) θB
The feature θB can be detected by the sensor B and follows the same data processing as θA. We can regulate the variation between θA and θB to determine the relative position of the chest and the left thigh and to recognize the postures of lying, sitting, and standing. For example, if the initial angles of θA and θB are identical to 0 as “standing,” then the condition of (θA=0o and θB=90o) will be “sitting”.
3) ωX_B
The feature ωX_B is provided by the gyroscope of the sensor B to judge the static posture or the dynamic motion. According to the practical test, the angular velocity was approaching 0 as steady status, but its absolute value would pass a level (> 10 rad/sec by referring Fig 3b) for the apparent motions. Hence, we can calibrate this rule with fuzzy variables as “the thigh is starting to move”.
4) σY_B
The dynamic motions such as walking and running can be calibrated by the standard deviation of sway conditions along the y direction due to the sensor B. The membership function of σY_B is shown in Fig 3c. The motion of changing posture is defined as “in moving” since it could be either “walking” or “running”. We use σY_B of gy data distribution as the level “in moving”. Herein, the motion is “in moving,” “walking,” or “running” when σY_B is less than 0.2g, between 0.2g and 0.6g, or greater than 0.6g, respectively.
5) μZ_B
Besides of σY_B, we can also consider μZ_B, which is the mean value of gz in absolute integer value, to categorize different types of activity recognition. The membership function of μZ_B is shown in Fig 3d that a variety of ranges present movement levels.
The input features above can calibrate sensed WSN data through the fuzzy system for the output movement. Fig 4 illustrates the membership function of output.
Figure 4. Output of activity recogntion pattern after defuzzification B. Fuzzification and Defuzzification
The first step of fuzzification is finding the membership function. In this test, as shown on Fig 3a, the θA and θB can be considered as the low angle if they are in the range between 0o and 36o; otherwise they are classified as the high angle that is grater than 36o. Similarly, the membership function shown in Fig 3b implies a cut for ωX_B to detect the motion is starting. Furthermore, for “walking” and “running”, Fig 3c and 3d provide the required membership functions for fuzzification of σY_B and μZ_B to find the criteria. At once the membership functions of input and output features are obtained, the fuzzy rules can be calibrated for the activity recognition pattern.
For defuzzication, the MATLAB toolbox was applied with the discretization technique to carry out the solution.
V. RESULTS
In this study, we recruited three volunteers who wore the developed WSN sensor A and B on the chests and thighs, respectively, to collect sensed data. Then, the movements of
static postures and dynamic motions were calibrated through fuzzy algorithm to yield the pattern library of activity recognition. Fig 5 shows the data distribution of acceleration components in gravity corresponding to a variety of movement sensed by the sensor A and B, respectively. The input features including ωX_B, θA, θB, σY_B, and μZ_B for the fuzzy system were extracted and the output movement for lying, sitting, standing, in moving, walking, and running were finally obtained. By comparing the calibrated data and real motions, we found the good recognition rate as results show in Table 2. In the test, most of test movements were recognized with successful rates approaching 99.33% in average while that of the static postures and dynamic motions were approximately 100% and 98.67%, respectively. These results approved accuracy and stability of the developed devices in this study.
Figure 5. (from up to down) Measured acceleration components in gravity during a period by (a) sensor A and (b) sensor B.
VI. CONCLUSION REMARKS
In this study, we developed the wearable WSN sensor integrated with the accelerometer and gyroscope to detect the signals of body movements including static postures (e.g., lying, sitting, and standing) and dynamic motions (e.g., walking and running). The sensed data could be transported to the backend server via WSN by wearing the sensors on the
chest and the left thigh. The fuzzy algorithm was applied for calibrating these data while qualifying the input features involving the tilt angles, the angular velocity, the standard variation and the mean value of acceleration in gravity. With processes of fuzzification and defuzzification, the activity recognition pattern library was created and output movements were obtained. Comparing with the traditional threshold criteria, the proposed algorithm can consider more flexible range with judge rules as recognizing the sensed data. The results performed the successful recognition rate to 99.33% in average and this preliminary study possessed the potential in advanced application on the ubiquitous health care for physical therapy.
ACKNOWLEDGMENT
This work is supported under Grant CMU 97-181, NSC 98-2221-E-130-016 and NSC 99-2221-E-130-022.
REFERENCES
[1] H. Medjahed, D. Istrate, J. Boudy and B. Dorizzi, “Human Activities of Daily Living Recognition Using Fuzzy Logic for Elderly Home Monitoring,” Proc. of IEEE on FUZZ-IEEE, Aug. 2009, pp. 2001-2006.
[2] C. R. Wren, A. Azarbayejani, T. Darrell, and A. P. Pentland, “Real-Time Tracking of the Human Body,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 19, no. 7, July 1997, pp.780-785. [3] W.-S. Yeoh, I. Pek, Y.-H. Yong, X. Chen, and A. B. Waluyo,
“Ambulatory Monitoring of Human Posture and Walking Speed Using Wearable Accelerometer Sensors,” Proc. the IEEE on Engineering in Medicine and Biology Society, Canada, Aug. 2008, pp.5184-5187.
[4] W.-S. Yeoh, J.-K. Wu, I. Pek, Y.-H. Yong, X. Chen, and A. B. Waluyo, “Real-Time Tracking of Flexion Angle by Using Wearable Accelerometer Sensors,” Proc. the 5th International Workshop on Wearable and Implantable Body Sensor Networks, China, June 2008, pp.125-128.
[5] E. Jovanov, A. Milenkovic, C. Otto, and P.C. de Groen, “A wireless body area network of intelligent motion sensors for computer assisted physical rehabilitation,” J. of NeuroEngineering and Rehabilitation, 2005, vol. 2, no. 6, doi: 10.1186/1743-0003-2-6.
[6] G. Virone, A. Wood, L. Selavo, Q. Cao, L. Fang, T. Doan, Z. He, R. Stoleru, S. Lin, J.A. Stankovic, “An Assisted Living Oriented Information System Based on a Residential Wireless Sensor Network,” Proc. 1st Transdisciplinary Conf. on Distributed Diagnosis and Home Healthcare, April 2006, pp.95-100.
[7] J. Andréu, J. Viúdez and J.A. Holgado, “An Ambient Assisted-Living Architecture Based on Wireless Sensor Networks,” Proc. 3rd Symp. Ubiquitous Computing and Ambient Intelligence 2008, vol. 51/2009, pp. 239-248, DOI: 10.1007/978-3-540-85867-6_28.
[8] R. Steele, C. Secombe, and W. Brookes, “Using Wireless Sensor Networks for Aged Care: The Patient's Perspective,” Proc. Pervasive Health Conference and Workshops, May 2006, pp. 1-10.
TABLE II. THE SUCCESSFUL RATE OF ACTIVITY RECOGNITION TEST
Sample Standing Sitting Lying In Moving Walking Running Average
Sample 1 100 100 100 100 100 100 100
Sample 2 100 100 100 94 94 100 98
Sample 3 100 100 100 100 100 100 100
IEEE COPYRIGHT AND CONSENT FORM
To ensure uniformity of treatment among all contributors, other forms may not be substituted for this form, nor may any wording of the form be changed. This form is intended for original material submitted to the IEEE and must accompany any such material in order to be published by the IEEE. Please read the form carefully and keep a copy for your files.
TITLE OF PAPER/ARTICLE/REPORT, INCLUDING ALL CONTENT IN ANY FORM, FORMAT, OR MEDIA (hereinafter, “the Work”): A Preliminary Activity Recognition of WSN Data on Ubiquitous Health Care for Physical Therapy
COMPLETE LIST OF AUTHORS: Shu-Yin Chiang, Yao-Chiang Kan, Ying-Ching Tu, Hsueh-Chun Lin
IEEE PUBLICATION TITLE (Journal, Magazine, Conference, Book): 2011 International Conference on Data Engineering and Internet Technology (DEIT 2011)
Copyright Transfer
1. The undersigned hereby assigns to The Institute of Electrical and Electronics Engineers, Incorporated (the “IEEE”) all rights under copyright that may exist in and to: (a) the above Work, including any revised or expanded derivative works submitted to the IEEE by the undersigned based on the Work; and (b) any associated written or multimedia components or other enhancements accompanying the Work.
Consent and Release
2. In the event the undersigned makes a presentation based upon the Work at a conference hosted or sponsored in whole or in part by the IEEE, the undersigned, in consideration for his/her participation in the conference, hereby grants the IEEE the unlimited, worldwide, irrevocable permission to use, distribute, publish, license, exhibit, record, digitize, broadcast, reproduce and archive, in any format or medium, whether now known or hereafter developed: (a) his/her presentation and comments at the conference; (b) any written materials or multimedia files used in connection with his/her presentation; and (c) any recorded interviews of him/her (collectively, the “Presentation”). The permission granted includes the transcription and reproduction of the Presentation for inclusion in products sold or distributed by IEEE and live or recorded broadcast of the Presentation during or after the conference.
3. In connection with the permission granted in Section 2, the undersigned hereby grants IEEE the unlimited, worldwide, irrevocable right to use his/her name, picture, likeness, voice and biographical information as part of the advertisement, distribution and sale of products incorporating the Work or Presentation, and releases IEEE from any claim based on right of privacy or publicity.
4. The undersigned hereby warrants that the Work and Presentation (collectively, the “Materials”) are original and that he/she is the author of the Materials. To the extent the Materials incorporate text passages, figures, data or other material from the works of others, the undersigned has obtained any necessary permissions. Where necessary, the undersigned has obtained all third party permissions and consents to grant the license above and has provided copies of such permissions and consents to IEEE. Please check this box if you do not wish to have video/audio recordings made of your conference presentation.
See reverse side for Retained Rights/Terms and Conditions, and Author Responsibilities.
General Terms
• The undersigned represents that he/she has the power and authority to make and execute this assignment.
• The undersigned agrees to indemnify and hold harmless the IEEE from any damage or expense that may arise in the event of a breach of any of the warranties set forth above. • In the event the above work is not accepted and published by the IEEE or is withdrawn by the author(s) before acceptance by the IEEE, the foregoing copyright transfer shall
become null and void and all materials embodying the Work submitted to the IEEE will be destroyed.
• For jointly authored Works, all joint authors should sign, or one of the authors should sign as authorized agent for the others.
(1)__HSUEH-CHUN LIN___________________________________________________________2011/1/17_______________________________
Author/Authorized Agent for Joint Authors Date
U.S. Government Employee Certification (where applicable)
This will certify that all authors of the Work are U.S. government employees and prepared the Work on a subject within the scope of their official duties. As such, the Work is not subject to U.S. copyright protection.
(2)_____________________________________________________________ ___________________________________
Authorized Signature Date
(Authors who are U.S. government employees should also sign signature line (1) above to enable the IEEE to claim and protect its copyright in international jurisdictions.)
Crown Copyright Certification (where applicable)
This will certify that all authors of the Work are employees of the British or British Commonwealth Government and prepared the Work in connection with their official duties. As such, the Work is subject to Crown Copyright and is not assigned to the IEEE as set forth in the first sentence of the Copyright Transfer Section above. The undersigned acknowledges, however, that the IEEE has the right to publish, distribute and reprint the Work in all forms and media.
(3)_____________________________________________________________ ___________________________________
(Authors who are British or British Commonwealth Government employees should also sign line (1) above to indicate their acceptance of all terms other than the
copyright transfer.) rev. 060309
IEEE COPYRIGHT FORM
(continued)
RETAINED RIGHTS/TERMS AND CONDITIONS
1. Authors/employers retain all proprietary rights in any process, procedure, or article of manufacture described in the Work.
2. Authors/employers may reproduce or authorize others to reproduce the Work, material extracted verbatim from the Work, or derivative works for the author’s personal use or for company use, provided that the source and the IEEE copyright notice are indicated, the copies are not used in any way that implies IEEE endorsement of a product or service of any employer, and the copies themselves are not offered for sale. 3. Authors/employers may make limited distribution of all or portions of the Work prior to publication if they inform the IEEE in advance of the
nature and extent of such limited distribution.
4. In the case of a Work performed under a U.S. Government contract or grant, the IEEE recognizes that the U.S. Government has royalty-free permission to reproduce all or portions of the Work, and to authorize others to do so, for official U.S. Government purposes only, if the contract/grant so requires.
5. For all uses not covered by items 2, 3, and 4, authors/employers must request permission from the IEEE Intellectual Property Rights office to reproduce or authorize the reproduction of the Work or material extracted verbatim from the Work, including figures and tables.
6. Although authors are permitted to re-use all or portions of the Work in other works, this does not include granting third-party requests for reprinting, republishing, or other types of re-use. The IEEE Intellectual Property Rights office must handle all such third-party requests.
INFORMATION FOR AUTHORS
Author Responsibilities
The IEEE distributes its technical publications throughout the world and wants to ensure that the material submitted to its publications is properly available to the readership of those publications. Authors must ensure that their Work meets the requirements as stated in section 8.2.1 of the IEEE PSPB Operations Manual, including provisions covering originality, authorship, author responsibilities and author misconduct. More information on IEEE’s publishing policies may be found at http://www.ieee.org/web/publications/pubtoolsandpolicyinfo/index.html. Authors are advised especially of IEEE PSPB Operations Manual section 8.2.1.B12: "It is the responsibility of the authors, not the IEEE, to determine whether disclosure of their material requires the prior consent of other parties and, if so, to obtain it." Authors are also advised of IEEE PSPB Operations Manual section 8.1.1B: "Statements and opinions given in work published by the IEEE are the expression of the authors."
Author/Employer Rights
If you are employed and prepared the Work on a subject within the scope of your employment, the copyright in the Work belongs to your employer as a work-for-hire. In that case, the IEEE assumes that when you sign this Form, you are authorized to do so by your employer and that your employer has consented to the transfer of copyright, to the representation and warranty of publication rights, and to all other terms and conditions of this Form. If such authorization and consent has not been given to you, an authorized representative of your employer should sign this Form as the Author.
IEEE Copyright Ownership
It is the formal policy of the IEEE to own the copyrights to all copyrightable material in its technical publications and to the individual contributions contained therein, in order to protect the interests of the IEEE, its authors and their employers, and, at the same time, to facilitate the appropriate re-use of this material by others. The IEEE distributes its technical publications throughout the world and does so by various means such as hard copy, microfiche, microfilm, and electronic media. It also abstracts and may translate its publications, and articles contained therein, for inclusion in various compendiums, collective works, databases and similar publications.
Reprint/Republication Policy
The IEEE requires that the consent of the first-named author and employer be sought as a condition to granting reprint or republication rights to others or for permitting use of a Work for promotion or marketing purposes.
THIS FORM MUST ACCOMPANY THE SUBMISSION OF THE AUTHOR’S MANUSCRIPT. Questions about the submission of the form or manuscript must be sent to the publication’s editor.
Please direct all questions about IEEE copyright policy to: