國 立 交 通 大 學
理學院 網路學習 學程
碩 士 論 文
掃 描 穿 隧 電 子 顯 微 鏡 之 即 時 控 制 軟 體 設 計
Program Design of The RealTime System for
Scanning Tunneling Microscope
研 究 生:陳永華
指導教授:簡紋濱 教授
掃描穿隧電子顯微鏡之即時控制軟體設計
Program Design of The RealTime System for
Scanning Tunneling Microscope
研 究 生:陳永華
Student:YungHua Chen
指導教授:簡紋濱
Advisor:WenBin Jian
國 立 交 通 大 學
理學院 網路學習 學程
碩 士 論 文
A Thesis Submitted to Degree Program of ELearning College of Science National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master in Degree Program of ELearning June 2009 Hsinchu, Taiwan, Republic of China中華民國九十八年六月
摘要
一個掃描穿隧式電子顯微鏡其主要架構包含:機械系統、電路系統以及電腦影像系 統三部分。本研究主要是以一台自製掃描穿隧式電子顯微鏡為基礎,發展其電腦影像系 統。除一般掃描圖像輸出的功能外,更針對實驗需求設計各種控制參數,以期加強實驗 研究者對於操控電子顯微鏡的即時性與多樣性。 經過初步實驗後的結果,我們發現影響掃描輸出圖形品質的因素,除了探針與機械 系統設計之外,軟體圖像的處理也很重要。從電路系統中所讀取到的資料必須經過適當 的處理,改善對比與色調部分,才能得到與其它商業機台相同品質的影像,此外為了讓 圖像品質能更提升,我們試著針對顯微鏡在室溫下工作的缺點,設計平坦化處理的演算 法,藉以解決探針熱漂移等問題,使得掃瞄結果更貼近真實情況。 另外為了讓影像品質更穩定,我們考慮到掃描探針製作上可能造成的缺陷,會直接 影響到取像的清析度,故本系統中設計讓探針掃描時可以有任意的行進角度,並且使用 者可以選擇兩種不同的探針移動方式,以解決探針尖端不對稱所造成輸出的影像模糊。 關鍵詞:掃描穿隧式電子顯微鏡、控制系統、電子顯微鏡軟體Abstract
The main structure of a scanning tunneling microscope involves three
parts—namely Mechanical part, Electrics part, and Computer program.
The purpose of the research is to develop a computer image system mainly based on a
homemade scanning tunneling microscope. Except for the ordinary function of outputting
scanned images, the design of the image system provides various parameters to satisfy the
needs of the experiment, two featuresreal time and variety.
According to the result of the experiment, the researcher found that the factors that
influence the quality of outputting images are not only the design of tips and mechanical
system but also the software that processes the images. In addition, the data retrieved from the
circuit system have to be processed adequately. That is, by improving the contrast and the tone of colors, the same images quality retrieved from commercial system can be achieved.
Besides, to improve the image quality, solve the problem of thermal drifting of tips, and make the scanning output more authentic, the researcher devised a deslope algorithm to overcome the difficulties which may occur when the scanning tunneling microscope working under the room temperature. Moreover, to make the image quality more stable, some possible defects of the making of scanning tips were taken into consideration because this may directly influence the clarity of
the retrieved images. Furthermore, to solve the problem of blur images resulted from asymmetry tips, the design the system allow the scanning tips to do arbitrary angle scanning,
and provides the users two different options of tips movements.
誌謝
本篇論文的完成,首先最需要感謝的是指導教授簡紋濱教授給予的指導,帶領我進 入研究的殿堂,尤其因為我在職進修的身份,其實沒有很多機會進入實驗室做研究,教 授也安排實驗室裡的同學特別給我協助,讓我可以透過網路連繫溝通,進行實驗與測試。 第二個最需要感謝的就是實驗室裡給我最多協助的許文澤同學,在自己的碩士研究 之外還能花那麼多的時間幫我做測試,沒有你的幫忙這篇論文是不可能那麼快完成的。 另外也要感謝專班的陳明璋教授,在這兩年中指導我們作研究的方法以及簡報的技巧, 這對我在口試時非常有幫助。還有陳永富教授、楊賜麟教授的建議與指正,使我受益良 多。感謝老婆在旁陪我渡過不知幾個寫論文的下午,並且在數學上給我協助,完成了系 統中角度運算的功能。 最後感謝我的父母在我的成長過程中對我的付出,使我不會有比別人少的學習機 會,可以完成碩士的學業,謝謝你們。 陳永華謹識于交通大學 July 21, 2009目錄
摘要... i Abstract ... ii 誌謝...iii 目錄... iv 圖目錄... vi 第 1 章 緒論 ... 1 11 研究背景與動機 ... 2 12 目的 ... 2 第 2 章 顯微鏡技術與應用介紹 ... 3 21 顯微鏡之硬體簡介與其相關技術 ... 3 211 壓電效應... 3 212 探針... 5 213 防震措施... 6 22 STM 的取像方式... 6 第 3 章 系統架構... 9 31 機械系統... 9 32 電子控制系統... 11 33 電腦影像系統... 16 331 控制參數... 17 332 掃描指示圖... 19 333 繪製影像... 19 334 掃描流程... 20 335 輸出對比調整... 23 336 掃描區域旋轉功能... 24 337 參數設定檔... 25 338 存檔格式... 26 第 4 章 實驗結果與討論 ... 27 41 STM image... 27 42 坡度與平坦化... 28 43 探針行進路徑... 30 44 尺度與標準樣品 ... 30圖目錄
圖 2-1 壓電效應實驗... 4 圖 22 逆轉壓電效應實驗... 4 圖 23 三腳架型掃描探針驅動器... 5 圖 24 以電化學法製作 STM 掃描探針 ... 5 圖 25 製作完成之探針在 SEM 下的影像... 6 圖 26 定電流取像法之工作方式... 7 圖 27 定高度取像法之工作方式... 8 圖 31 STM 系統架構圖... 9 圖 32 碟型掃描器之結構... 10 圖 33 XY 軸方向的運動 ... 10 圖 34 Z 軸方向的運動... 10 圖 35 電子控制系統架構圖... 11 圖 36 (A)穿隧電流放大電路 (B)絕對值及反相電路... 12 圖 37 回饋系統電路 ... 13 圖 38 探針位置驅動電路... 14 圖 39 數位轉類比電路 ... 15 圖 310 類比轉數位電路 ... 15 圖 311 電腦影像系統畫面... 16 圖 312 參數畫面... 17 圖 313 掃描開始鈕 ... 18 圖 314 掃描指示圖 ... 19 圖 315 掃描輸出影像視窗... 20 圖 316 掃描任務流程圖 ... 22 圖 317 自動對比功能 ... 23 圖 318 自動對比演算流程圖... 24 圖 319 旋轉角度後之座標變化... 25 圖 320 任意點之座標關係... 25 圖 321 參數設定檔內容 ... 26 圖 41 (A) DVD 樣品在探針品質較佳時之掃描圖形 (B)相同樣品在探針品質較差時之掃 描圖形 ... 27 圖 42 (A)較尖銳探針掃描樣品表面時之路徑示意圖 (B)前端較鈍之探針掃描樣品表面時之路徑示意圖... 28 圖 43 (A)掃描時常見的輸出圖形 (B)將左圖之資料繪製成立體圖後之側視圖 ... 28 圖 44 (A)得到平坦化後之圖形;(B)將左圖之資料繪製成立體圖後之斜視圖... 29 圖 45 探針以不同角度掃描的輸出結果 ... 29 圖 46 造型不對稱的探針在不同移動方向下造成的影響... 30 圖 47 標準樣品之溝槽間距... 31
第1章 緒論
顯微技術在近代科學的發展上,一直有著舉足輕重的地位,每當人類可以看到更微 小的東西,許多科學技術就更往前邁進一大步,新的商業產品也就應運而生。近年來電 子元件的製程已達 65 奈米等級,甚至最新的四核心中央處理器已經達到 45 奈米製程。 因此,可以看出人類對於微小世界中的探索與操控,一直保持著高度的求知慾。 很早以前人們就會知道可以用玻璃球來放大物體,到了 13 世紀人們甚至會用透鏡 製作能夠改善視力的眼鏡。16 世紀的雷文霍克是首先以光學顯微鏡觀察血球細胞的人, 自此之後光學顯微鏡的倍率一直隨著技術的進步而增加,帶領人們進入到肉眼不可見的 微小世界,但是光學顯微鏡的解析度卻受到可見光波長的限制,只能達到 0.2 微米左右, 我們知道原子的大小大約為 0.2 奈米,為此科學家們一直在尋找解決的方式,其中包涵 使用紫外線及 Xray 等的不可見光作為介質的顯微技術研究,但是所提升的效果仍然有 限。 1920 年左右,電子波動學說的提出,發現電磁波與光波的特性相似,波長更短,此 後,科學家便開始發展使用電子束為介質的顯微鏡,也就是現在所謂的「電子顯微鏡」 (electron microscopy)。1931 年德國的工程師 Ernst Ruska 和 Max Knoll 製作出第一台的磁場穿透式電子顯微鏡(transmission electron microscope, TEM),到了 1940 年代,TEM 的 解析度已經可以達到 10 奈米左右。
掃描穿隧電流電子顯微鏡(scanning tunneling microscope, STM)是於 1982 年由 G. Binnig 和 H. Rohrer 在 IBM 的蘇黎世實驗室發展出來。STM 的原理是利用一個非常尖銳
的金屬探針靠近具有導電性的物質表面,產生量子理論中的穿隧電流,再利用控制壓電 材料來達到觀測物質表面的顯微技術。其解析度達到數個奈米以下,可此外 STM 更可 以利用探針尖端精確的操縱原子,因此目前它在奈米科技中是一項重要的測量及加工工 具。
11 研究背景與動機
Binnig 與 Rohrer 所設計的 STM 系統,是利用尖銳的探針接近原子等級平整的表面 到數奈米的距離下。由於探針與樣品之間的偏壓產生穿隧電流,其電流值的大小約幾奈 安培(nA),小於探針與樣品之間做點接觸所產生的電流,更小於微米等級穿隧結 (tunneling junction)的工作電流。在此條件下探針與樣品保持固定的距離,藉由掃描器可 以讓探針與樣品間產生水平位移(XY 方向),並藉回饋系統可以保持探針與樣品間固定 距離(垂直位移),測量掃描器伸縮的 Z 方向距離,來描繪出樣品表面的地形圖。 本研究是基於 Binnig 與 Rohrer 所設計的 STM 系統,其結構可分為三大部分,分別 為機械硬體系統、電子控制系統(包括與電腦連結介面)與電腦影像系統(包括資料處理軟 體與影像分析)。以此基本結構發展能即時控制 STM 系統之電腦影像軟體,並針對實驗 需求設計不同的掃描流程與參數,期望能透過軟體設計,加強實驗研究者對於操控 STM 的即時性與多樣性。12 目的
本研究主要將根據交通大學量子物理實驗室所設計之掃描穿隧式電子顯微鏡其電 子控制系統為基礎,發展視窗式的即時控制軟體,主要目的為滿足實驗研究之各種量測 需求。經過初步實驗所得知結果後,再針對探針在室溫下的工作缺點,設計不同的掃描 方式,解決探針熱漂移等已知之問題,以求能將掃描數據更貼近真實情況。第2章 顯微鏡技術與應用介紹
掃描穿隧電流顯微鏡(STM) 發展於 1980 年代初期, 由 G. Binnig 和 H. Rohrer 於 IBM 公司位於蘇黎士的實驗室所製造出來,兩人並因此獲得 1986 年的諾貝爾物理學獎。STM 是一套可以觀測物質表面原子排列狀態的掃描探針顯微術(scanning probe microscopy, SPM),近代科學家藉此技術探索到原子、分子以及奈米等級的物理現象,許多如物理、 化學、材料科學、表面科學等領域的研究工作也因此得到助益。STM 技術不僅可以用 在真空的環境下,在空氣和其他各種液體或氣體中也可操作,溫度範圍從 0˚K 到攝氏幾 百度皆可。 STM 技術是建立在量子隧道(quantum tunnelling)的概念上。在古典力學當中,一個 低位能階的粒子是不可能越過能量障壁到達另一邊,除非該粒子的動能超過該能量障 壁。但是從量子物理的觀點來看並非如此,粒子的狀態可用一波函數來描述,粒子出現 在任一空間中的機率與波函數的振幅成平方正比。因此當金屬探針非常接近(小於 10 埃) 金屬或半導體表面時,兩波函數重疊,加上偏壓的探針與導體間會產生電子隧道,電子 有一定的機率可穿過能量障壁而產生穿隧電流(tunneling current)。穿隧電流的大小,與 探針距離樣品表面的高度有關,當探針距離表面越近,電流越大,反之則越小。我們藉 由控制壓電材料來移動探針,使探針掃描時維持一定的高度(穿隧電流量),如此一來, 掃描探針的起伏即可代表目前表面的地形起伏。再結合探針橫向位置的變化,就可以描 繪出三維空間的表面地形。
21 顯微鏡之硬體簡介與其相關技術
211 壓電效應
1880 年 Peirre Curie 和 Jacques Curie 發現了壓電效應(peizoelectric effect),他們將 一塊長形的薄石英片(quartz plate)用兩片金泊夾住,一片接地,一片接電壓表,再對 石英施以垂直方向的拉力,則可在電壓表上測得電壓,如圖 21 所示即為當時的實驗 平台。
圖 2-1 壓電效應實驗 design by Pierre Curie (18591906). [6] 在此之後,Lippman 於 1881 年提出可以將這個實驗逆轉進行的想法:即在石英 片上施以電壓,應該會造成石英片的形變,Peirre Curie 和 Jacques Curie 透過實驗再次 證明了這個理論。如圖 22 所示他們設計一個實驗將石英片 Q 通以高壓 M,接著透過 1:100 的槓桿 ABD 放大變化的幅度,再透過 100 倍的光學顯微鏡從有刻度的玻璃片 v 觀察槓桿末端 A,最後他們在總放大倍數為 10000 倍的觀測下測得石英的形變量為 0.021 Å/V。 圖 22 逆轉壓電效應實驗。M 為外加電壓,Q 為石英片,ABD 為 100:1 之槓桿,A 端點接觸一有刻度的玻璃片,最後於 v 點使用光學顯微鏡觀察刻度變化。[7] 使用壓電材料所製成的探針驅動器是 STM 裡最核心的部份,為了讓探針可以在 三個維度的空間中移動,先後發展出幾種不同的掃描器,目前常見的有三腳架型(tripod scanner)、管型(tube scanner)、碟型(disk scanner)掃描器。如圖 23 所示為三腳架型掃 描器,設計上利用三個不同方向的壓電材料組成,驅動前端探針位置的改變。
圖 23 三腳架型掃描探針驅動器。由三組不同方向的壓電材料所構成,下方為掃描探 針,可驅動探針於三維空間中移動。
212 探針
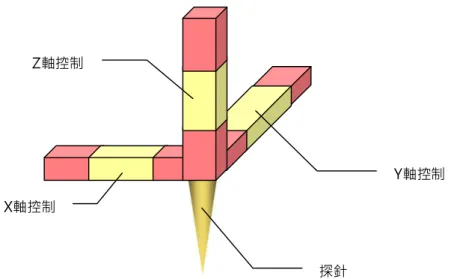
STM 的探針是用於偵測樣品表面與針尖原子之間的穿隧電流,因此探針必須為 可導電的材質,且為了得到原子級的解析度,探針的尖端與樣品表面接觸的部份應該 越小越好,因此,如何製作出如此細小的探針,是一個重要的課題。 圖 24 以電化學法製作 STM 掃描探針。右方為待製作的鎢線,左方為電極,在 KOH 溶液中通以直流電,則鎢線會開始被侵蝕,經過一段時間後斷落,則完成掃描探針。 [5] 常見的探針是由鎢絲經由電蝕法加工製成。如圖 24 所示,先將直徑約 0.5 mm 的鎢絲垂直放入氫氧化鉀的水溶液中約 0.5 cm,並在另一水中電極之間通以直流電 壓,此時產生的電化學反應會開始侵蝕鎢絲,當鎢絲斷落的瞬間將電壓切斷,即可形 成非常尖銳的 STM 探針,如圖 25 所示為一個經過電化學法製備而成的探針在 SEM Y軸控制 探針 Z軸控制 X軸控制下的影像。 圖 25 以電化學法製作完成之探針在 SEM 下的影像,其尖端為一直徑約 50 奈米的 球。[5]
213 防震措施
週遭環境的低頻震動與機器設備運轉的振動,會嚴重影響 STM 的取像品質, 防震措施成為一個重要的課題。震動抑制的方法有很多,如用磁浮方式將整個掃描 機台浮在空中,或採用空氣桌來隔絕外界的震動。較簡單的方法是使用彈簧避震裝 置及振盪阻尼(osillation damping)兩種裝置所構成,將掃描機台懸吊在彈簧避震裝置 當中以隔絕外界的震動。 整個 STM 的機械平台是由兩個部份所組成,包含一個外部框架和一個內層平 臺,兩者以防震裝置互相連接,以確保在掃描工作進行間不會受到外界干擾,影響 掃描取像的品質。22 STM 的取像方式
1. 定電流取像法(Constant Current Mode) 如圖 26 當電路獲得穿隧電流後,先將穿隧電流透過電流放大器放大,再送至 比較器電路與另一個參考值做比較,此參考值由操作者自訂。兩者比較後若穿隧電 流較大則表示探針太靠近樣品,較小則表示探針離樣品太遠,回饋電路根據兩者之 差值做放大,控制探針 Z 軸之驅動電路,將探針伸長(或退縮),以得到更多(或更少) 的穿隧電流,最終穿隧電流將會穩定在一個定值(參考值)。如此一來,配合移動改 變探針 XY 軸的位置,我們紀錄下 Z 軸的信號變化即可描繪出樣品的表面地形。圖 26 定電流取像法之工作方式。探針與樣品間藉由回饋電路保持固定的距離,紀錄 移動過程中 Z 軸的高度變化來繪製出地形圖。[8]
2. 定高度取像法(Constant Height Mode)
如圖 27 所示,定高度取像法固定掃描探針的高度,由於樣品表面地形的高度 變化,會導致樣品與探針的距離有所不同,藉由穿隧電流的大小來判讀出探針與樣 品間的距離,再配合移動探針的 XY 座標來掃描樣品,紀錄每一 XY 位置之穿隧 電流大小,來描繪出樣品表面的電流大小分佈圖,此分佈圖即代表樣品表面的地形 起伏。雖然掃描的速度較定電流取像法來得快,但是若樣品表面的起伏太大,將會 有探針撞擊樣品的危機。
讀取電流 穿隧電流 電流放大 偏壓 y x 圖 27 定高度取像法之工作方式。探針以恆高的方式移動,藉由得到穿隧電流的大小 來判斷出地形的起伏。[8] 3. 電流密度取像法(current imaging tunneling spectroscopy, CITS) 結合了上述兩種方法,主要仍以定電流取像為架構,並在其中改變偏壓為取像 變數,讓探針在回饋電路的控制下,在掃描過程中保持一定的高度。然後在每一座 標點,暫停回饋電路的作用,使得探針高度固定不動,接著調變偏壓,記錄不同偏 壓下之穿隧電流變化,即可得一電流電壓的變化曲線(IV curve)。以此法取像,因 回饋系統須不斷地開關,在每個座標點上進行多次的測量,極為費時,但 IV curve 可以用來做為表面電性的研究,亦可分析物質表面上奈米結構的電子能態分布。
第3章 系統架構
Binnig 與 Rohrer 所設計的 STM 系統,其架構可分為三大部分,如圖 31 所示,分 別為機械硬體系統、電子控制系統(包括與電腦連結介面)與電腦影像系統(包括資料處理 軟體與影像分析)。 圖 31 STM 系統架構圖31 機械系統
STM 機械硬體系統又可細分為探針驅動裝置與樣品座、掃描器元件、歩進器元件、 基台、彈簧避震元件、震盪阻泥元件、外框架與導電線路等部份。主要設計是為了要阻 隔外界的震動對掃描工作的影響,因為即使只是我們認為的微小震動,對奈米尺度的工 作而言,都是非常劇烈的震盪。 除此之外,本研究使用的機械系統的另一個重點就是探針驅動裝置,探針驅動裝置 主要由壓電材料與鎢金屬探針所組成,基本結構如圖 32 所示,我們使用蜂鳴片來製作 碟型掃描器(disk scanner),市售的蜂鳴片是在銅質金屬的基座上覆蓋一層壓電陶瓷,這 種元件一般使用在小型發聲電路或是作為行動電話之喇叭(speaker)。當蜂鳴片通以交流 信號時,壓電材料會以兩個不同方向形變,透過快速的形變震動空氣而產生聲音。我們 探針驅動裝置電子控制系統
電腦影像系統
機械系統
樣品將峰鳴片之壓電陶瓷利用工具切割為四等份,使得壓電陶瓷可以個別產生形變,中間再 接上陶瓷的探針座,最後在探針座頂端接上製作好的鎢金屬探針。 圖 32 碟型掃描器之結構。基座上的壓電材料經過等分切割後,上方安置探針座及鎢 金屬製成的探針。 若要控制掃描器使探針做 XY 軸的移動,可以在相對應的壓電陶瓷上加以極性相反 的正負電壓,使得壓電陶瓷會以不同方向形變,達到探針位置改變的效果,施加電壓後 之效果示意圖如圖 33 所示。 圖 33 XY 軸方向的運動[9] 若要控制掃描器使探針做 Z 軸的移動,則可在全部的壓電陶瓷上加以正或負電壓, 使得壓電陶瓷會以相同的方向形變,達到探針垂直位置改變的效果,示意圖如圖 34 所 示。 圖 34 Z 軸方向的運動[9] 掃描器頂端的探針與樣品之間還加上了一個直流偏壓(bias),當探針與樣品非常接近 時,可以從兩者之間量測到穿隧電流(tunnelling current)。穿隧電流的大小與偏壓、距離 X +X +Y Y 探針 探針座 壓電材料 基座
以及表面電性有關,一個品質良好的掃描影像需要一個穩定的穿隧電流,故直流偏壓的 大小需要因應不同的情況做即時的調整。
32 電子控制系統
本研究中使用的穿隧式電子顯微鏡目前僅提供定電流掃描模式(constant current mode),以這個模式所設計出來的電子控制系統其架構如圖 35 所示,包括一個電流放 大器、絕對值加反相電路、回饋系統、座標位置電路以及數位類比的轉換電路。 XYZ Position Current AMP Negative absolute D/A Feedback Loop A/D Set Vt Vx Vy Sample Bias Tunneling current Sample Vz X+ X Y+ Y Electronic System Vt 圖 35 電子控制系統架構圖 電子控制系統的主要工作是將探針與樣品間的穿隧電流藉由電流放大器讀取出 來,成為一個較大的值 Vt,傳至後端的絕對值反相電路。取絕對值的目的是為了考量到 實際掃描實驗時,因樣品偏壓的極性可能不同,穿隧電流可能是負值,但並不表示探針 與樣品的距離是負的,因此我們將穿隧電流取出後施以絕對值運算。取完絕對值後,再 將放大後的穿隧電流代表量值 Vt 反相,即可與回饋控制電路之另一個輸入 Set Vt 做差 值運算。差值運算由比較器組成,將穿隧電流與一固定考值比較,若穿隧電流較大,表 示樣品與探針較近(地形高起),則回饋控制電路會送出 Z 軸控制信號,控制壓電材料的 形變,使得探針向退後直到穿隧電流與參考值相同,意指彼此距離固定;若穿隧電流較 小,表示樣品與探針距離較遠,則回饋控制電路會送出相對應的 Z 軸控制信號,控制壓 電材料將探針向前伸長,直到相對距離固定。如此一來,藉由讀取回饋控制電路的 Z 軸控制信號,即可得知目前樣品的地形高度。
最後再透過類比與數位轉換將目前 Z 軸高度的電壓經過 ADC(analog to digit converter)轉換後,傳送到電腦端記錄,另一方面也接收電腦端的指令,電腦軟體會將下
個要量測的座標點之資料送出,經過 DAC(ditgit to analog converter)轉換為 X 軸以及 Y 軸的電壓,傳送到探針位置驅動電路(XYZ Position),藉以控制探針驅動裝置,移動探 針至下一個座標點。 以下就電路系統中各項功能之設計做個別說明: 圖 36 (a)穿隧電流放大電路。基本由 OPA 構成之電流放大器,電容器 C1~C3 可將背 景雜訊濾除。(b)絕對值及反相電路。可將因為偏壓極性不同而得到負值之穿隧電流修 正,反向電路之設計則是為了後端減法運算所需。
如圖 36(a)我們利用一個運算放大器(operation amplifier, OPA)設計穿隧電流放大電 路,主要目的是將奈安培(nA)大小的穿隧電流 It 做初步的放大,以利後端電路運算使用。 電路中必須考量雜訊的排除,因為穿隧電流的大小極低,一般電子電路中的雜訊如電 波、靜電荷、漏電流…等,都可能很容易的超過穿隧電流的量,若不加濾波與濾雜訊裝 置,放大後的 Vt 訊號中,雜訊可能大於穿隧電流而導致誤判探針與樣品之距離。經過 實驗檢驗,此電路可以將背景雜訊濾除至 10 mV 以下。 圖 36(b)為絕對值及反向電路,電路設計的理由是因為發現施加在樣品上的偏壓可 以是正電壓,也可以是負電壓。兩者都可以在探針上產生穿隧電流效應,實驗者可以嘗 試各種不同的參數,藉以分析樣品表面之電氣特性。若樣品偏壓為正電壓,得到的穿隧 電流即為正值;但若樣品電壓為負電壓,所得到的穿隧電流相對於整個電路系統而言, 為一負值,此一負穿隧電流是因偏壓極性關係所致,並非代表探針與樣品間之距離為負
值。因此我們利用運算放大器設計一絕對值運算電路,解決穿隧電流之正負極性問題。 解決穿隧電流之極性問題後,我們設計一個回饋電路系統,此電路主要工作是監控 穿隧電流,根據穿隧電流與參考值比較的結果調整探針垂直位置,藉此將探針穩定在一 個固定的高度,此即為定電流掃描模式的工作方式。 圖 37 回饋系統電路。前半部為減法運算,將參考值 Set Vt 與穿隧電流值 Vt 相減; 後半部為反相放大器,VR1、VR2 可以調整放大倍數,決定回饋給壓電材料 Z 軸高度 的回饋量。 如圖 37 回饋系統電路分為兩個部份,前半部為 OPA 所組成的差動放大器,其運算 是將前級電路放大後的穿隧電流值 Vt 與軟體設定之參考值 Set Vt 做比較,取其差值, 此差值表示探針需要修正的量,只有在穿隧電流與所設定的參考值相同時(差值為零), 表示探針高度不需修正,這也就是定電流掃描法的工作方式。後半部為一 OPA 組成的 反向放大器,可配合不同回饋電壓量之需求調整放大倍率,根據其放大後的結果 Vz, 後端的位置驅動電路將計算要送至壓電材料的電壓大小,改變探針的垂直方向高度。 舉例來說,若 Vt 與 Set Vt 的差值為正,表示穿隧電流小於所設定的參考值,放大 後的 Vz 值送至後端電路,其結果會將探針之垂直位置往樣品方向伸長;反之若 Vt 與 Set Vt 的差值為負,則表示穿隧電流小於參考值,最後結果會將探針之垂直位置向後退。 當探針垂直位置調整之後,電路得到新的穿隧電流,放大後的穿隧電流表示值 Vt 也將 改變,回饋系統將 Vt 與參考值 Set Vt 再次比較,其結果會得到新的 Vz,藉以重新調整 探針的位置。這樣的ㄧ個迴路(loop)會驅使探針與樣品間一直保持固定的距離,而這個 距離即為使用者設定的參考值 Set Vt 所代表的量。
inverter Amp. inverter Amp. Add OP Amp. Add OP Amp. Add OP Amp. Add OP Amp. Non inverter Amp. Non inverter Amp. X +X Y +Y Vx Vy Vz XYZ Position Non inverter Amp. 圖 38 探針位置驅動電路。主要由反向與非反向放大器組成,將控制電壓分為正負兩 個極性,分別控制相對位置的壓電材料。輸出端再掺入 Z 軸控制電壓,使得壓電材料 產生 Z 軸方向的高度變化。 如圖 38 探針位置驅動電路的輸出端所連接的是壓電陶瓷切割而成的碟型掃描器 (disk scanner),碟型掃描器有四個方向的壓電陶瓷接點,分別為+X、X、+Y 以及Y,
將 X 軸的控制電壓施加在+X、X 壓電陶瓷上,會使得壓電材料產生 X 方向的形變;而 Y 軸的控制電壓施加在+Y、Y 壓電陶瓷上,亦會使壓電材料產生 Y 方向的形變,探針 也因為形變的關係而傾向該方向。輸入端的 Vx、Vy 各經由反向放大及非反向放大後, 提供給碟型掃描器,使得壓電材料產生 X 方向與 Y 方向的形變,因而改變探針的位置。 Vz 則是先經由非反相放大後,再與±X、±Y 之電壓做加法運算,故 Vz 若為正,所 有輸出電壓皆增加一相對比例的電壓,壓電材料等量膨脹,探針高度變高;Vz 若為負, 所有輸出皆減少一相對比例的電壓,壓電材料等量縮小,探針高度變低。藉此達到控制 探針垂直位置之動作。
圖 39 數位轉類比電路。電腦端透過 USB I/O 晶片傳送數位資料,兩筆資料使用暫存 器整合為一筆 16 位元資料後轉換為類比電壓,控制線 C1~C4 決定輸出電壓的流向。
數位轉類比電路(圖 39)設計中為了讓系統有較高的解析度,我們採用的是 16 位元 的數位類比轉換晶片(DAC 16 bits),使得系統在±10V 的電壓範圍之下,有 0.305 mV 的 解析度。不過考量到電腦 USB 所連接的輸入輸出晶片(USB I/O chip)其輸出資料線(data bus)為 8 位元,我們在中間設計兩組暫存器(register),將所要傳送的數據資料以多工的 方式分成兩筆 8 位元資料,分別送至兩組暫存器,組合後再送至數位類比轉換晶片。 控制線 C0~C4 中除了 C0 為多工處理時高低位元組之分流控制線外,C1~C4 分別控 制轉換後類比電壓之流向,系統中由軟體所控制之參數分別為 X 軸電壓(Vx)、Y 軸電壓 (Vy)、穿隧電流參考值(Set Vt)以及樣品偏壓(Sample Bias)等四項。 555 OSC Vz USB I/O Chip USB Connector V輸入 GND Vref B1 B8 標誌 ENB ADC 16bits B1 B16 A/D Converter Vin 圖 310 類比轉數位電路。將 Vz 電壓透過轉換器轉為 16 位元的數位資料,再經由 USB I/O 晶片送至電腦端。 本研究系統設計採用定電流掃描模式,故軟體端必須紀錄每個座標點的 Z 軸電壓
值,如圖 310 所示此部份電路中設計一個 16 位元的類比轉數位 IC 將 Z 軸電壓值轉換 為 16 bits 的數位資料,再經由 USB 晶片傳回電腦端。轉換器另有一時脈輸入腳,外接 一振盪信號源,使得轉換工作是持續不斷的進行,轉換的取樣率為 10μs,電腦軟體端 無需多送一控制訊號,可以即時的讀取目前探針高度值,其讀取的電壓解析度一樣為 0.305 mV。
33 電腦影像系統
本研究所發展的電腦影像系統係根據前述電子控制系統之架構所設計,基本原則是 「控制探針移動在一個設定的平面上,並讀取出每一個座標點的 Z 軸高度」。不過為了 得到較好品質的地形影像,以及讓操作者能更即時的了解掃描工作的進行,並針對不同 的樣品特性嘗試不同偏壓方式及穿隧電流參考值,以得到較有研究價值的圖形,我們加 入了各種調整參數及輔助資訊,完成之軟體介面如圖 311 所示。 圖 311 電腦影像系統畫面 電腦影像系統的使用者操作介面(user interface)可分為三個主要視窗:控制參數視窗 (Property)、掃描指示圖視窗(ScanMap)、繪製影像視窗(STMxx)。本系統採用多重文件介面(multiple document interface, MDI)視窗設計,將掃描功能按鈕設計於上方之工具列 中,使用者可以進行多次的掃描任務,每次所繪製的地形影像會獨立顯示於不同編號的
子視窗(child window)中,並可隨時選擇任一子視窗進行儲存動作。以下分別描述各視窗 功能以及本系統之特色,並針對設計概念與方法做進一步的說明。
331 控制參數
可控制的參數共有九項,每項功能如圖 312 所示: 圖 312 參數畫面 在掃描任務開始前,使用者需要先設定穿隧電流的參考值大小(set current),此值代 表掃描任務進行時探針與樣品之間的固定距離,最小單位為 0.01 nA,該值越大,則探 針與樣品距離越近,反之則越遠。掃描時探針與樣品間的距離需保持多少必須經由實驗 測試得知,雖然探針較接近樣品時,穿隧電流較大,能夠確實量測出樣品表面細節,但 是若是測量距離設定太近,探針可能在移動時,會有撞針的危險。 接著需設定樣品偏壓的大小(bias),此值因為不同樣品的表面電性不同,會影響穿隧 電流的產生,所得到輸出的圖形特徵將有些微差異,使用者可自行調整。其次使用者可 透過 Area 屬性調整掃描區域的大小,掃描區域將被定義為一個 Area × Area 的正方形 區域,而最大掃描範圍受到壓電材料大小與探針基座高度影響,在機械系統完成時即固定。 Offset X 及 Offset Y 可以讓使用者改變掃描區域的中心位置。在一般情況下,大部 分的實驗操作都是先針對樣品做最大範圍的初步掃描,當初步掃描完成後,再根據輸出 影像中想要進一步觀測的部分進行深入(放大)掃描。因此設計此功能方便使用者指定掃 描區域之用。 解析度 Points 參數是指在掃描區域內,每邊欲讀取 Z 軸高度的數量,程式會將 Area 之值換算為測量範圍後,將此正方形區域的邊長等分為 Points 份。因此 Points 值越高, 圖形的解析度越高,得到的數據資料也越多,掃描時間相對的變長。 Dwelling Time 代表探針在每一個座標點停留的時間,時間設定愈小探針移動的速度 越快。但若掃描速度過快回饋電路所需的反應時間太少,探針無法完全與參考值達到回 饋穩定狀態,意指此時 Z 軸高度並不能正確代表樣品地形,可能會使得輸出影像模糊, 甚至造成探針與樣品撞擊的危險。若掃描時間過長也可能因為探針的熱漂移現象而得到 較模糊的影像。 旋轉值 Rotate 可以讓掃描區域逆時針旋轉,範圍從 0~360 度,此值設定後會重新計 算掃描區域的座標,並在掃描指示視窗中顯示出待掃描區域。當使用者調整完上述參數 後,即可按下開始掃描鈕,如圖 313 所示。 圖 313 掃描開始鈕 在掃描任務進行時,使用者被允許更動參數視窗內的部份參數,以即時的方式調整 穿隧電流與樣品偏壓,以得到較好的圖像品質。並且考慮到探針尖端可能會因為觸碰樣 品或是本身品質不良,造成穿隧電流品質不良、圖像不清楚或模糊,我們設計了一個 Pulse(脈衝)按鈕功能,此功能會在樣品與探針之間製造一個持續 1 毫秒的大電場,試圖 改變針尖原子的排列狀況,適當的使用可以改善部分圖形模糊不清的問題。
332 掃描指示圖
如圖 314 本視窗顯示三個資訊:一為左方的探針高度位置(probe position),在掃描 任務開始前,使用者必須做樣品安置及進針動作,此時探針會升到最長狀態,使用者操 作機台上之手動螺旋步進器,使得樣品接近探針,當兩者接近至一定距離之後,回饋系 統感測出穿隧電流,探針受控制而退後至與樣品保持一定距離,則進針動作完成。 圖 314 掃描指示圖。左方之線段表示探針目前高度資訊,用來作為進針步驟時之參 考;右方為最大掃描區域以及目前掃描區域,當掃描開始時代表探針的白色圓點將會 依由左至右、由上而下的順序移動。 二為右方的掃描區域指示圖(scanning area),此視窗標示出最大可掃描區域及目前指 定掃描區域,當掃描工作進行時指定掃描區域內會以圓點指示出目前探針位置,掃描時 將會以由左至右、由上至下的方向逐一讀取地形高度。 最下方為掃描資訊的顯示列,Counter 為一個倒數的變數,其最大值為本任務總共 欲讀取的座標點數量 Points × Points,使用者可從此得知目前掃描工作之進度。又因探 針在每一座標點上停留之時間為 Dwelling Time 毫秒,故探針掃描整個區域所需的總時 間是可以由此估算出來。333 繪製影像
本研究發展的特色為一即時的控制系統,故繪製影像的動作是在掃描的過程中同時 掃描方向進行,如圖 315 所示,但掃描工作是以毫秒為單位下進行大量進行電腦的 I/O 動作。當 Dweling Time 設定為 1 ms 時,一秒內將有 1000 次的 I/O 指令,而繪圖動作則因電腦速 度的不同可能會影響掃描時的讀取準確性。因此,為了得到品質較佳的圖形,不希望繪 圖的指令影響電腦輸入輸出指令動作,我們將繪製影像的程式安排在讀取一行資料後, 探針回程的時間當中進行。 圖 315 掃描輸出影像視窗。當探針讀取完一行資料後,將會即時繪製出一條輸出圖 形,圖中為程式測試階段所輸出的虛擬地形,深色部份代表地形較低的區域。
探針每趟自左方開始讀取 Z 軸資料自右方,所花時間為 Points × Dwelling Time 毫 秒,當探針要讀取下一行時,程式會控制探針回到下一行座標的最左方。在此回程當中 不會讀取 Z 軸資料,利用這短暫的期間,將會進行繪圖指令動作。因 Z 軸高度資料為一 16 bits 之值,其大小為 0 ~ 65535,繪圖指令會將其值重新對應到 0 ~ 255 的範圍並提高 對比,否則輸出圖形將無法辨別出地形的高地落差。同時為了讓輸出畫面較醒目,我們 會將顏色調整至偏紅色,此顏色為軟體調整的結果,電腦實際讀取出的 Z 軸資料僅為地 形高度值,並無樣品表面顏色。
334 掃描流程
掃描任務開始後,程式會先依設定之參數計算本次掃描任務中,探針移動路徑座標,接著輸出所設定之穿隧電流參考值(set current)與樣品偏壓值(bais),準備階段完成 後,即開始重覆輸出 Vx、Vy,與讀取 Z 軸高度之動作,每次輸出 Vx、Vy 的控制訊號 後,皆會等待一個 Dwelling Time 的短暫時間,待回饋系統將探針穩定在一個固定的高 度。最後將所得資料輸出在繪製影像當中。演算流程如圖 316 所示。
START Get Properties Bais, Current, X Range, Y Range Points, Delay...etc Calculate every coordinates of X & Y to Array Loop Points * Points Output Bais & Current to I/O Loop Output Xpos=ArrayX[i] Ypos=ArrayY[i] to I/O Read Z data to DataArray[i] from I/O Wait Delay (ms) Output DataArray to Image END 圖 316 掃描任務流程圖 ¬ Bais : 探針與樣品間的偏壓 ¬ Current : 回饋電路所參考的穿隧 電流 ¬ X&Y Range : 用來決定掃描範圍 ¬ Points : 每邊要掃描的點數 ¬ Delay : 探針停留每點的時間 ¬ more Delay times get more stable data from Tip. ¬ But the Tip will drift more
335 輸出對比調整
自動對比功能是為了解決探針熱漂移現象所設計之功能,在實際掃描實驗中我們發 現,探針在掃描一段時間之後,容易因為工作溫度的提高造成穿隧電流逐漸變大,回饋 電路系統為了維持固定的穿隧電流量,會將探針往後退(定電流掃描模式)。最後所得到 的影像就會是一個越來越高(亮)的地形圖,如圖 317 之左方視窗。 當此功能打開時,我們設計一個新的演算法,將熱漂移所得到的上坡地形,重新拉 回到斜率為零的方式顯示出來,如圖 317 之右方視窗所示。 圖 317 自動對比功能。左方視窗為前次掃描所得的圖形,下半部明顯偏亮,代表探 針因漂移現象而出現之上坡地形;右方視窗則為開啟自動對比功能後所輸出的圖形, 此為虛擬資料所代表之地形,為一平面上有一溝槽。 去除斜率的演算法是以每條線為單位,首先以迴圈方式計算每條線之 Z 軸之平均高 度,接著算出平均高度上升的斜率,再來以水平線為基準求出每條線需要修正的偏移 量,最後再用迴圈重新計算每條線要顯示的高度,即為平坦化的影像,演算流程如圖 318 所示。圖 318 自動對比演算流程圖
336 掃描區域旋轉功能
為了因應特殊的實驗需求,我們設計讓掃描區域可以作適當旋轉的功能,當掃描的 目標區域要做一個旋轉角度時,程式會透過三角函數計算掃描路徑中的 XY 軸座標,如 圖 319 所示我們重新計算旋轉後各端點的座標。
圖 319 旋轉角度後之座標變化。P 為邊長(Points 參數),r 為中心點與端點距離,A、 B、C、D 點為旋轉後之端點座標。 路徑陣列中存放的是探針每一步所要移動的座標位置,因此我們利用圖 320 的座 標關係來計算路徑中每一點的 XY 軸座標數據。每條掃描路徑中座標點的數量是由解析 度(points)參數決定,程式會將每條掃描線的起點與終點座標依解析度之設定等分,將 XY 位置座標分別儲存於掃描路徑陣列當中,以供後續程式輸出之用。 圖 320 任意點之座標關係。圖中表示範圍中某一行的起點與終點的座標關係,將 X 與 Y 座標差等分為 p 份後,計算出該行所有路徑座標。
337 參數設定檔
在掃描實驗中我們發現使用者經常會需要使用相同的參數掃描某件樣品,原因為該 樣品在某個設定的參數下所得的圖像品質較佳,這與樣品的電性有關,故使用者經常在 開啟掃描程式時,須要重新輸入前次掃描時所使用的參數。本系統設計將掃描參數視窗 的值於關閉程式時,自動存入設定檔中,並且在每次開啟程式時,自動將設定檔內容匯 入,增加實際操作上的便利性。圖 321 參數設定檔內容。本系統會自動儲存掃描參數,以便下次開啟檔案時可以使 用前次掃描參數。
338 存檔格式
檔案的儲存格式中,在檔頭裡包含本次掃描任務中的相關參數:解析度(points)、穿 隧電流參考值(set current)、掃描速率(dwelling time)、影像大小(area)等,檔案主體是掃 描工作中讀取到的地形高度資訊,每筆高度資料大小為 2 位元組,總數量為解析度的平 方倍。
第4章 實驗結果與討論
41 STM image
我們使用本研究所發展之軟體掃描一個 DVD 的樣品,並且成功的在掃描範圍為 1700 × 1700 nm 2 以及解析度為 250 點的設定之下繪製出 DVD 軌道的溝槽結構,如圖 41(a)。其中顏色較深部分即為 DVD 軌道溝槽,深度約為 30 nm。而圖 41(b)則為使用 不同之探針在相同的參數設定之下,掃描相同樣品所得到的輸出圖形,從圖中明顯可以 看出溝槽之寬度較(a)圖窄,並且表面的紋路與左圖比較起來更為平滑。 圖 41 (a) DVD 樣品在探針品質較佳時之掃描圖形,表面紋路較清楚,溝槽較寬;(b) 相同樣品在探針品質較差時之掃描圖形,可看出表面較平滑,溝槽較窄。 許多文獻中指出,探針的尖銳度會影響掃描路徑與樣品真實地形之間的差異。因 STM 系統的設計,是讓探針與樣品間保持一固定的距離,若當探針較尖銳時,掃描探 針移動的路徑將如圖 42(a)所示,與樣品真實地形之間只有些微的不同;而當探針尖端 較鈍的情況時,掃描路徑如圖 42(b)所示,掃描探針移動的路徑將無法真實呈現樣品之 地形。甚至可能無法完全伸入樣品之溝槽當中,造成溝槽深度上的量測誤差。 (a) (b)圖 42 (a)較尖銳探針掃描樣品表面時之路徑示意圖,在與樣品保持一定距離的狀況 下,其路徑較接近實際樣品表面;(b)前端較鈍之探針掃描樣品表面時之路徑示意圖, 其路徑與實際樣品表面差異較大。
42 坡度與平坦化
經過多次的掃描實驗,我們發現當探針掃描經過一段時間之後,容易因為工作溫度 的提升或是導電特性的變化,穿隧電流會逐漸升高,回饋電路為了得到固定的穿隧電流 量,會將探針向後退。以至於得到如圖 43(a)下半部越來越亮的圖形,若是以分析軟體 繪製出立體地形圖,則會看到如圖 43(b)的上坡地形。此為典型的探針漂移(drift)現象。 圖 43 (a)掃描時常見的輸出圖形,探針 Z 軸向上漂移,造成下半部偏亮;(b)將左圖 之資料繪製成立體圖後之側視圖,呈現很明顯的上坡地形。 自動對比功能與一般電腦影像處理中的增強色彩對比的功能不同,強調的是將斜率 去除的運算,也就是將上坡的地形平坦化,其輸出結果如圖 44 所示。不過此功能僅改 善系統執行時的顯示圖形,同時也為了保持原始資料的真實性,系統在儲存檔案功能 時,將會以自動對比處理前之原始資料為主,避免資料失真。 (a) (b)圖 44 (a)開啟自動對比功能,得到平坦化後之圖形;(b)將左圖之資料繪製成立體圖後 之斜視圖,樣品本身地形的起伏相對明顯許多。 掃描範圍旋轉功能之設計則可以解決經過自動對比的平坦化處理後,「若樣品本身 即為上坡地形該如何?」之疑慮,我們可以調整將掃描區域以旋轉 90 度的方式來掃描 相同的範圍,使得探針在漂移現象發生前,即將原掃描範圍的下方區域先行掃描,此時 原先 Y 軸方向的地形起伏將可即時表現出來。使用者可將兩者掃描圖形相互比較,排除 平坦化處理的疑慮。經過實驗我們發現,樣品表面在奈米尺度下不會有太多的坡度變 化,也就是說在一般掃描圖形中所出現的上坡地形,幾乎都是探針漂移現象所造成。如 此一來,經過平坦化後顯示出來的圖形,已經可以充分表示樣品表面之地形。 而旋轉掃描範圍除了可以做到上述功能之外,還可以讓使用者做任意角度的旋轉。 如圖 45 所示,在掃描實驗中使用者經常認為掃描輸出的圖形特徵不甚理想,於存檔後 會使用圖形處理軟體進行修正。本系統設計的旋轉掃描範圍功能,可以任意角度的方式 移動探針,除了可以達到使用者實驗上的需求外,實驗中我們也發現掃描樣品特徵時, 探針以與特徵相互垂直的方向掃描,可以得到較清析的圖形。如圖 45(b)中之溝槽左側 邊緣起伏較圖(a)為之清析明顯。 圖 45 探針以不同角度掃描的輸出結果。(a)一般掃描時出現的圖形;(b)掃描範圍向 左旋轉約 30 度後得到的圖形。 (a) (b) (a) (b)
43 探針行進路徑
不論在一般掃描方式或是在旋轉角度掃描方式下,探針皆是掃描完一條線之後,以 原路徑回到該行之起點,再往下移動到下一行繼續掃描。若以解析度為 100 點為例,整 個掃描任務中探針要讀取 Z 軸資料的筆數為 100 × 100 = 10000 點,而探針移動的步數 為 100 × 2 × 100 = 20000 步,其差別就在於探針回程的部分。 理論上來說,若改以 S 型的路徑移動探針,將可以最有效率的方式,掃描整個區域。 但經過實驗,我們發現結果出現的圖形並不清晰,探針向左移動與向右移動所繪製出的 圖形不易吻合,以 S 型路徑掃描後,容易出現橫向的紋路,我們認為是因為探針尖端原 子排列不對稱的關係。以電化學法侵蝕而成的鎢金屬探針,其最尖端可能不是對稱之造 型,如此一來在不同的移動方向下將會產生不同的掃描結果,如圖 46 所示,兩種路徑 的資料交錯排列的圖形,就會出現橫向的紋路。因此為了得到品質較佳的圖形,系統中 提供使用者兩種掃描的方式,一為速度較快的 S 型掃描;一為圖形較佳的 Z 型掃描,其 目的是要讓探針能在相同移動方向的條件下,讀取地形高度資料。 (a) (b) 圖 46 造型不對稱的探針在不同移動方向下造成的影響 。(a)左側面較不尖銳的探針向 左移動時會得到較差的圖形;(b)向右移動時則得到較佳的圖形。44 尺度與標準樣品
STM 掃描器之測量最大尺度決定於掃描探針驅動器及電子控制系統。本研究所使 用之探針驅動器為碟型掃描器(disk scanner),該掃描器驅動探針可及的最大範圍會受到 壓電陶瓷的大小以及基座(含探針)的高度影響,故每台 STM 製作完成時其可掃描範圍皆有些微差異,甚至更換探針後,尺度也將隨之改變。 我們採用一個已知的標準樣品來定義出掃描尺度,圖 47 為一個標準的 DVD 樣品 輸出圖形,已知其溝槽間距為 700 nm,則可推算此圖形的邊長約為 1200 nm,即可以此 為標準定義出尺度範圍。本系統設計一功能可讓實驗者輸入最大可掃描範圍之數值,以 此值作為參數視窗中 Area 參數之最大值。 圖 47 標準樣品之溝槽間距為 700 nm,可由此推判出目前掃描圖像之尺度大小。
700nm
第5章 結論
發展一個 STM 的電腦影像系統除了一般程式的設計基礎之外,必須先了解 STM 顯 微鏡的動作原理,除了探針與壓電材料等核心元件外,電路系統的運作方式以及控制訊 號的流向也都需要熟悉,故本系統是在經過一段時間資料的研讀後,方才進入軟體的規 劃設計階段。 第一個測試程式是將 Z 軸資料藉由 I/O 指令讀取出來後,直接轉換為灰階影像顯示 在視窗中,接著讓程式控制 X、Y 軸電壓使得探針於一個方形區域中掃描。此測試程式 的結果是在畫面中顯示一灰色的色塊,無法辨識出樣品表面,但是仔細觀察後發現此灰 色色塊中有些微的斑紋,並非完全相同之灰階顏色。探討其原因是因為從電路中讀取之 Z 軸值為 16 bits 資料,其範圍為 0~65535,程式為了將數值顯示在 256 色的灰階當中, 採以等比之方式縮小其範圍,但是樣品表面之地形起伏轉換為 Z 軸值後其變化量並不 大,可能僅在數千之內的範圍變化,故顯示於畫面中之顏色灰階值皆相似,肉眼無法清 楚識別。 經過初步的程式測試之後,我們改變等比縮小的方式,改採動態方式決定對應灰階 值。以此次掃描任務中地形變化的最高點(Zmax)至最低點(Zmin)為範圍,將此約數千 左右之範圍等比分為 256 色之灰階,並且調整調色盤設定,使得顯示顏色變為較為鮮明 的紅黃色系,如此一來輸出之圖形即可清楚辨識出樣品地形之特徵,而此時程式才算有 基本掃描之功能。 程式執行的速度一直是此系統設計的重點之一,因為長時間的掃描下探針會有嚴重 的漂移問題。為了讓探針能夠精準的在座標上停留一個 Dwelling Time(最小為 1 ms)並讀 取該點之 Z 軸高度,程式設計時必須克服高階語言常有的計時器精準度問題,再者,為 了不讓程式在執行掃描階段時執行過多運算指令,造成 CPU 負擔影響計時,掃描路徑 座標的計算於掃描開始前階段時,即先行運算存放於陣列當中,如此一來可以減少 CPU 的指令時間,提高程式的執行效率以得到較穩定清晰的輸出圖形。研究者認為,開發一個 STM 的電腦影像系統若能針對前述之事項加以設計規劃, 除基本掃描程式的功能外,甚至要完成一個商業級的應用程式也並非難事。經過與其他 業界之 STM 掃描軟體相互比較,我們也完成了許多附加功能,如旋轉掃描範圍、掃描 參數的儲存等等。另外我們也嘗試一些改善速度的新功能:例如在探針掃描路徑的回程 時間,讓探針以較快的方式移動,以提升整體掃描時間。經測試大約可省下正常的 1/3 時間,而此功能在實驗機台上已經固定預設被使用,縮短實驗時間,降低探針漂移之影 響。 將掃描工作的設定以更直覺的方式來操作,使用者可以在畫面中直接指定出與掃描 的區域,即可進行掃描任務。如此可以讓使用者進行掃描實驗時更快速的找出欲觀測之 樣品重點,得到有用的數據與圖形。另一方面也希望結合圖像分析軟體,讓使用者於掃 描完成後、甚至掃描過程中,即可分析影像中之地形資料。也建議未來研究人員可以針 對 STM 不同的掃描模式:定高度取像法與電流密度取像法之軟體流程進行研究,以期 設計出符合各種實驗研究所需之工具與介面。
![圖 2-1 壓電效應實驗 design by Pierre Curie (18591906). [6] 在此之後,Lippman 於 1881 年提出可以將這個實驗逆轉進行的想法:即在石英 片上施以電壓,應該會造成石英片的形變,Peirre Curie 和 Jacques Curie 透過實驗再次 證明了這個理論。如圖 22 所示他們設計一個實驗將石英片 Q 通以高壓 M,接著透過 1:100 的槓桿 ABD 放大變化的幅度,再透過 100 倍的光學顯微鏡從有刻度的玻璃片 v 觀察槓桿末端 A](https://thumb-ap.123doks.com/thumbv2/9libinfo/8488220.184567/13.892.382.552.101.430/實驗逆轉進行想法即在石英片上施以電壓應該會造成石英片通以高壓.webp)
![圖 26 定電流取像法之工作方式。探針與樣品間藉由回饋電路保持固定的距離,紀錄 移動過程中 Z 軸的高度變化來繪製出地形圖。[8]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8488220.184567/16.892.303.632.106.423/定電流品間回饋電路保持固定距離紀錄移動過程中軸的來繪製出.webp)




