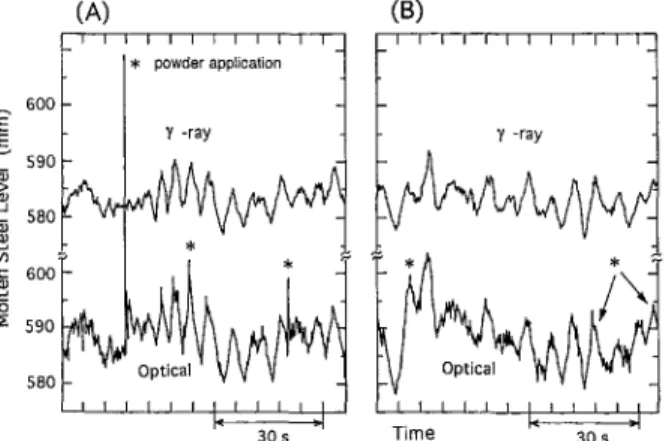
Fig. 7 Effect of numerical compensation on the measured curves repre-senting the molten steel level in CCP as measured by the optical distance meter with T value at 0.1 s: (A) before compensation and (B) after com-pensation of transient. The curves obtained using the y-ray level meter, are also shown for comparison. Timing at the powder application is indicated as *. The optical distance meter detected center of the target surface, while y-ray detected mean level of the target surface.
Acknowledgments
We are grateful for Pacific Metals Co., LTD during the exper-iments of CCP. The comments of C. Saloma were also appreci-ated.
References
Araki, T., Yokoyama, S., and Suzuki, N., 1994, "Simple Optical Di.stance Meter Using an Intermode-beat Modulation of He-Ne Laser and an Electrical Heterodyne Technique," Rev. Sci. Imtrum.. Vol. 65, pp. 1883-1888.
Araki, T., 1995, "An Optical Distance Meter Developed Using a Short Pulse Width Laser Diode and a Fast Avalanche Photo-diode," Rev. Sci. Instrum., Vol. 66, pp. 43-47.
Schunkc, B., Cowers, C, W., Hirsch, K., and Nielsen, P., 1993, "A Laser Diode as a Light Source for Calibrating the Time Base of a Streak Camera," Rev. Sci. Imtrum.. Vol. 64, pp. 3338-3339.
Seta, K., Ohishi, T., and Seino, S., 1985, "Optical Distance Measurement Using Inter-mode Beat of Laser," Japan. J. Appl. Phys., Vol. 24, pp.
1374-1.375.
Tatum, J. A., Jennings III, J. W., and MacFarlane, D. L., 1992, "Compact Inexpensive, Visible Laser Source of High Repetition Rate Picosecond Pulses," Rev. Sci. Instrum., Vol. 63, pp. 2950-2953.
distance due to a splash of the molten steel, appears in the optical method. The rapid increase of the recorded curve [parts ( 3 ) - ( 4 ) in Fig. 5] is caused by the bias of the powder.
Unexpected reflection of the optical beam arising from the application of the powder also leads to erroneous fluctuations in the measured level. On the other hand, the level recorded by the y ray sensor increased gradually between parts (3) and (4) because the sensor is unaffected by the powder application. Both the optical method and the y-ray method showed similar traces of the steel level, after the powder has been applied.
For further evaluation of the proposed method, the eddy cur-rent sensor was also employed. However, there is appreciable inconsistency on the recorded curves between these two meth-ods as shown in Fig. 6. This is because the optical distance meter detected the powder surface, while the eddy current sensor did not sense the powder.
C. Response Time. It is necessary to find the appropriate
response time to achieve a reliable monitoring of the steel level during CCP applications. Among the various r values, T = 0.1 s was found to be the most suitable to apply a high-speed CCP, although the measurement accuracy slightly decreases comparing with that at a larger r value. However, this response is so fast that the time dependent effects arising from the powder application and the fire-stirring are also detected as a strong spike noise as shown in Fig. 7. To remove such unwanted noises, the large and rapid level change that exceeds 10 mm/s was masked using numerical compensation [Fig. 7 ( B ) ] . How-ever, the unwanted spike noise was reasonably suppressed with-out numerical compensation when T value was set at 0.2 s (see Fig. 6 ) .
V Conclusion
We have developed an optical distance meter that is suitable for monitoring the level of molten steel during CCP. Because the achievable measurement range and accuracy were 1000 mm and 1 mm, respectively, the meter is suitable for use during in-process CCP. The measurement range of the optical method is more than ten times those that could be attained using either the y-ray and eddy current methods, so that continuous monitor-ing of the steel level can be done from the initiation of the casting process. This capability can be used to realize automatic start of casting and can contribute to increase of the casting quality.
Robust Kalman Filter Synthesis for
Uncertain Multiple Time-Delay
Stochastic Systems
Feng-Hsiag Hsiao ^ and Shing-Tai Pan^
The problem of robust Kalman filter synthesis is considered in this present .study for discrete multiple time-delay stochastic systems with parametric and noise uncertainties. A discrete multiple time-delay uncertain .stochastic system can be trans-formed into another uncertain stochastic system with no delay
by properly defining state variables. Minimax theory and Bell-man-Gronwall lemma are employed on the basis of the upper norm-hounds of parametric uncertainties and noise uncertain-ties. A robust criterion can consequently be derived which guar-antees the asymptotic stability of the uncertain stochastic .sys-tem. Designed procedures are finally elaborated upon with an illustrative example.
1 Introduction
The existence of delay, which is commonly encountered in various engineering systems, is often a source of instability. Moreover, multiple delays occur in most physical systems. For example, systems with computer control have delays, as it takes time for the computer to execute numerical operations. Besides, remote working, radar, electric networks, transport process, metal rolling systems, etc. all have delays. The output in these systems responds only to an input after some time interval. The problem of stability analysis of delay systems has consequently been a main concern of several previously published research efforts [ 1 - 9 ] . The introduction of time-delay factor generally complicates the analysis, and convenient methods to test stabil-ity have long been sought.
' Department of Electrical Engineering, Chang Gung College of Medicine and Technology, 259, Wen-Hwa 1st Road, Kwei-San, Taoyuan Shian, Taivt'an 333.
^National Chiao Tung University, Department of Control Engineering, 1001, Ta Hsueh Road, Hsinchu, Taiwan 300.
Contributed by the Dynamic Systems and Control Division of THE AMERICAN SOCIETY OF MECHANICAL ENGINEERS . Manuscript received by the DSCD Novem-ber 1993; revised manuscript received February 1995, Associate Technical Editor: A. Ray.
Journal of Dynamic Systems, Measurement, and Control DECEMBER 1996, Vol. 1 1 8 / 8 0 3
The Kalman filter is verified to be the optimal estimator against noise with normal distribution by minimizing a wide class of reconstruction error performance index [10], In many practical situations, however, noise covariances may not be ac-curately known, or else its distribution may not be normal. Numerous reports in regard to this subject have been published [10-14] from the minimax viewpoint by obtaining the sad-dlepoint solution for the least favorable distribution. The prob-lem of robust Kalman filter synthesis for discrete multiple time-delay stochastic systems with parametric uncertainties and un-certain noise covariances is worthwhile studying since it has not appeared in previous literature. A discrete multiple time-delay uncertain stochastic system can be transformed into an-other uncertain stochastic system with no delay by properly defining new state variables. Minimax theory and Bellman-Gronwall lemma are employed for deriving a robust criterion which guarantees the asymptotic stability of the uncertain sys-tem under parametric uncertainties and uncertain noise covari-ances. This paper may be viewed as a generalizafion of Chen and Dong [10] to the discrete multiple time-delay systems.
The organization of this paper is as follows: System descrip-tion is presented in Secdescrip-tion 2. The design procedure of a robust Kalman filter is proposed in Section 3. An example is provided in Section 4 for illustrating our main results. A conclusion is finally provided in Section 5.
2 System Description
A discrete uncertain stochastic system with multiple time delays, which are not exact integer multiples of the sampling interval, is depicted by the following difference equations:
x,(k + I) = AoX„(k) + AAoik)x,(k) + X AiXp(k - hi)
m
+ Y, l^Aiik)x,{k - hi) + v{,k) (2.1fl) y{k) = C,x,(k) + AC„(k)x,(k) + e(k) (l.lb)
where Xp(k) is an « X 1 state vector, y(k) is a. p X 1 output vector, v(k) is an « X 1 random process vector, e(k) is a p X
1 random process vector; /?, (time delay) i = 1, 2, . . . , w are positive real numbers and AQ, A,, Cp (rank(Cp) = p) are con-stant matrices with appropriate dimensions. AAo(k), AAi(k) and ACp(k) denote linear time-varying parametric uncertainties with the following upper norm-bounds:
||AAo(fc)|| =s a \\AAi(k)\\ £ 77;, / = 1,2, ||AC,(fc)|| s p (2.2a) (2.2b) (2.2c)
where a, rji, and p are given constants. The process noise v(k) and measurement noise e(^) are uncorrelated random sequences with zero mean. Moreover, they have no time correlation or are "white" noise, that is,
E{v(i)v''(j)] = 0 if ii^j, (2.3a) E{e(i)e''(j)} = 0 if ii=j, (2.3b)
and have covariances or "noise levels" defined by
E{v(k)v''(k)} = « i (2.3c) E{e(k)e''(k)] ^R2 (2.3d)
where R^ and /?2 are symmetric, positive definite matrices and have the following norm-bounds:
\\Ri - RA\ s ei
11^2 - Rli S £2 804 / Vol. 118, DECEMBER 1996
(2.3e) (2.3/)
in which €i, e^ are given positive constants, i?io, R20 denote the nominal parts of the actual covariances of the process noise
v(k) and measurement noise e(k), respectively.
By defining an n(m + 1) X 1 new state vector
x(k) = [xl(k - h„)x'p(k - /2„,_i)
xl(k - h,) xl(k)Y,
(2.4) the uncertain multiple time-delay system (2.1) can then be transformed into the following uncertain system with no delay:x(k+ \)= Ax(k) + AA(k)x(k) + v(k) y(k) = Cx(k) + AC(k)x(k) + e(k)
in which A = 0 0 0 A„, AA(k) I 0 0 0 0 0 A i 0 0 0 0 / Ao. JTX/T) 0 0 (2.5a) (2.5b) (2.6a) 0 0
lAA„(k) AA„,_,(fc) AA,(k) AAo(k).
C = [0 0 AC(k) = [0 0 v(k) = 0 Cpjpx/ri ••• 0 ACp(k)]p^„ -- Gv(k), (2.6b) (2.6c) (2.6d) (2.6e) where n(m + 1) and G =
According to (2.3c) and (2.6e), the covariance of v(k) is given by
E[v(k)v^(k)} = GR,G^ = R, (2.7)
and Ri has the following norm-bound:
11^1 - ^loll s £, (2.8) where ^,0 = GRioG'' and e, = eiI|G|| WCl
Lemmal.l: Ifrank(Cp) = p , t h e pair {A, C) is observable. Proof: From (2.6c), obtained here is rank (C) = rank (Cp).
If rank (Cp) = p , the pair (A, C) is then observable if and only if rank C CA CA"-" ^xmk(0,.p) = n[\5]. (2.9) (/r-/j+l)pxjr.
The matrix On-p is easily observed to have the following form:
0„-„ = CpAoA,„ C,A„. LpA,„_] + C„AoA,„ C,A2 CpA] + CpAoA, C„Ai CpAo + C,Al (2.10) (iT~p+1 )px/r
and 0„-p has n linearly independent rows. Thus, rank (On-,,) = n. The proof is then complete.
3 Robust Kalman Filter
Prior to discussion of the design of robust Kalman filter for the uncertain system (2.5), let's consider first its nominal sys-tem (i.e., AA(fc) = 0, AC{k) = 0 and e, = €2 = 0):
x(k+ I) =Ax(k) + vik) y(k) = Cx{k) + e{k).
(3.1a) (3.1b) The optimal filter that estimates the state x(k) of system (3.1) is given by the Kalman filter:
i(fe + 1) = Axik) + F(k)[y(k) - Cxik)] (3.2a)
F(k) = AP(k)C'^[R2 + CP{k)CT' (3.2b)
where Kalman filter gain F(k) is chosen for minimizing the performance index J = \x and P(k) is the solution of the following equation:
P(k+\) = AP(k)A'' + R^
- AP(k)C''[R2 + CP(k)CT'CP(k)A''. (3.2c)
Objective here lies in formulating a robust Kalman filter for a given observable system (3.1) such that the filter still asymptoti-cally tracks the actual states in the presence of parametric uncer-tainties and uncertain noise covariances.
The approach for the design of a robust Kalman filter is divided into two steps. In the first step, we only consider the system (3.1) under uncertain noise covariances, i.e..
x(k + 1) = Ax(k) + v(k) y(k) = Cx(k) + e(k) (3.3a) (33b) with W, e S , = {\\R, -i?,o|| s e , , f i , > 0 ) (3.4a) i?2 e 52 = {||«2 - ^2oll =s £2, ^2 > 0 } . (3Ab) The design of a robust Kalman filter for the system (3.3) can therefore be viewed as a saddlepoint problem which deals with the uncertain (but bounded) noise covariances problem. By means of minimax theory [13] and following the same proce-dure as that in Chen and Dong [10], the following lemma is obtained as:
Lemma 3.1 [10, 13]: The robust Kalman filter under noise
uncertainties is the Kalman filter in (3.2) with the worst noise covariances, R\a + 'ej and 7^20 + £2/; i-C-i
x(k+ \)= Ax(k) + F(k)[y(k) - Cx(k)] (3.5a) F(k) = AP(k)C''[(R2o H- £2/) + CP(k)CT' (3.5b) P(k + I) = AP(k)A'' + (Rio + ej) - AP(k)C''
[(«2o + £2/) + CP(k)C'']-'CP(k)A''. (3.5c)
'11/11 = ( 2 E[f''(k)f(k)]y'^ in which £ ( • ) denotes the expected value o f { ' ) .
Next, the Kalman filter in (3.5) may still not be robust if the system (3.1) is perturbed not only by noise uncertainties but also by parametric uncertainties (i.e. the uncertain system (2.5) is considered). Consequendy, it is necessary that more restric-tions must be imposed to let the Kalman filter in (3.5) be robust under parametric uncertainties.
Define the state reconstruction error x(k) ^ x(k) ~ x(k) and subtract (3.5a) from (2.5fl). Consequently obtained here is
x(k+ l ) = Jc(/t+ l)-x(k+ I) = (A - FC)(x(k) - Jc(k))
+ (AA(k) - FAC(k))x{k) + v(k) - Fe(k). (3.6) Yielded through a combination of (3.5o) with (3.6) is
x(k+ \)= Ax(k) + AA(k)x(k) + Hn(Jfc) (3.7) where (3.8a) x(k) = A = \x(k)' x(k) _ ' "A 0 0 A- FC ' AA(k) 0" _AA(k) - FAC(k) 0 H = 'I 0 " n(k) = \v(k)~ Ve(k)_ ' ( 3 . 8 / 7 ) (3.8c) (3.Sd) (3.8e)
A robust criterion is derived in the following for guaranteeing the asymptotic stability of the system (3.7). Prior to examina-tion of robust stability, Bellman-Gronwall lemma, which is use-ful in the proof of the next theorem, is given below.
Lemma 3.2 [16]: Let Z+ denote the set of nonnegative
inte-gers: {0, 1, 2, . . .} and Uk, fk, K be real-valued sequence on Z+. Let U.t.c, if Uk hk a 0, Vfe e Z+ •fk+'L hiUi, fe = 0, 1, 2, . . . (3.9) Uk ^ /* + L n (1 + hi)hj> i<j<k k = 0, 1,2, ... (3.10)
where 0 (1 + hj) is set equal to 1 when i = k - 1. i<-j<k
Note that
(a) If for some constant hu, hi s HM, V ; , then
Ukr^fk + KX(^+h^Y-'~'fi- (3.11)
i=0
(b) If for some c o n s t a n t / ^ , / < f^, V( then Uk^fM n (1 +h,). R2 G So — <i Ron — (3.12) 0.2 0 0 0.2 R20 + 0.2 0 0 0.2
Theorem 1: If the matrix A is diagonable and Hurwitz (i.e.,
all the eigenvalues of A are inside the unit circle) such that the state transition matrix A* satisfies the inequality:
(4.2/2) and ||A*|| < Mr" k=Q,\, 2, (3.13) ^ 1 0 — 0.4 0 0 0.1 Ron — 0.3 0 0 0.3
in which M a 1 and 0 < r < 1 and if the following inequality holds: where h = — r \r(l + h)\ <l
2 U + I,7, +Pll^l
(3.14) (3.15)By defining a new state vector Xp\K
xik) Xp{k) 1.5) (4.3)
the uncertain stochastic time-delay system (4.1) is then trans-formed into the following uncertain system with no delay:
then the Kalman filter in (3.5) is a robust filter under parametric and noise uncertainties, that is, the system (3.7) is asymptoti-cally stable.
Proof: See Appendix. 4 Example
The following uncertain stochastic time-delay system is con-sidered as:
x{k+ \)= Ax{k) + AA(/t)jr(/t) + v(k) y(k) = Cx(k) + AC(k)x(k) + e(k)
where A = r 0 - - ^ i
/ 1
Ao_ 0 0 0.2 0 1 - 0 . 1 0.2 0.01 - 0 . 2 - 0 . 1 , Xp(k + 1) = 0 0.2 " 0 0.2-o.r
- 0 . 1 _ 0.2 " 0.01 AA(k) = Xp(k) Xp(k - 1.5) + AAo(k)Xpa) + AAdk)Xp(k - 1.5) + v{k) (4.1a) 0 0 AA,(/c) AAo(fc) (4.4a) (AAb) (4.5a) {A.5b) y(k) with and where /?! e 5, = j Ru 0.1 0 " 0 0.1 Xp(k) + ACp(k)Xp(k) + ||AAo(fc)||^0.02' ||AA,(A:)|| < 0.01 ||ACp(^)|| :a 0.03 E[v(k)} = Ele(k)} = 0 E{v(k)v''{k)} = R, E{e(k)e^(k)] ^ R2 R)o ~ "C .1 0 " 0 0.1 s /?, < «io + e{k) '0.1 0 i4.1b) (4.2a) (4.2b) (4.2c) (4.2d) (4.2e) ( 4 . 2 / ) 0 " 0.1}
G = C = v(k) = Gv(k), ' 0 1 = ' 0 0 "0 0" 0 0 1 0 0 1 0 0.1 0 0 0 0.1 (4.5c) (4.5,i) (4.5e) AC(k) = [0 ACp(k)] . ( 4 . 5 / )Additionally, the pair {A, C} is definitely observable from the fact of Lemma 2.1.
The Kalman filter according to (3.5) is described as follows:
x(k+ I) = Ax(k) + F[y(k) - Cx(k)] (4.6a)
in which F = •-0.0015 -0.0068 0.1018 0.0015 -0.0208 -0.0095 0.0015 0.0495 J (4.6b) (4.2g)
The condition number M = 5.3438 and r = 0.5692 are obtained here through substituting F into (3.&b) and then applying the inequality (3.13). Yielded here through substituting \\F\\ and the upper norm-bounds (4.2fl)-(4.2c) into (3.15) is
M
h = -[2(a + Tj^) + P\\m r
'^ If A is a q X q diagonable and Hurwitz matrix, one obtains the following result:
iiAi = iiei'e-'ii s iieii m i
Mrwhere A = diag ( \ i , ^2 K) '""' ^ - II2II IIQ'II ('he condition number of A). The /th column of Q is an eigenvector corresponding to \ , . Moreover, r is chosen as the distance from the origin to the eigenvalue (of the matrix A) nearest the unit circle,
^ 2-norm case is considered in this example.
^ 5.3438 0.5692 and then |r(l -t- h) [2(0.02 + 0.01) -I- 0.03 X 0.1021] = 0.5921 0.5692 X (1 + 0.5921) = 0.9062 < 1.
The robust stability condition (3.14) is consequently satisfied. Namely, the Kalman filter in (4.6) is a robust filter in the
Time (sec) Time (sec)
Fig. 1 Simulation of robust Kalman filter under parametrical and noise uncertainties in the example with true state x = [X1X2X3X4]'^ with initial condition [1 0.9 0.35 0.75]'^ and state estimate x = [*iX2X3X4]'^ with initial condition [-0.95 0.85 - 0.45 - 1.45]'^
presence of parametric and noise uncertainties. Tlie result of simulation witli AA,(/c) 0.02 sin (k) 0 0 0.01 exp(-/t) 0.005 cos (k) 0 0 0.01 sin (k)
4 Ikcda, M., and Ashida, T., 1979, "Stabilization of Linear Systems with Time-Varying Delay," IEEE Trans. Automat. Control, Vol. 24, pp. 369-370.
5 Chou, J. H., Horng, I. R., and Ciien, B. S., 1989, "Dynamical Feedback Compensator for Uncertain Time-Delay Systems Containing Saturating Actua-tor," Intermit. .1. Control, Vol. 49, pp. 961-968.
6 Mori, T., 1985, "Criteria for Asymptotic Stability of Linear Time Delay Systems," IEEE Trans. Automat. Control, Vol. 30, pp. 158-161.
7 Mori, T., Fukuma, N., and Kuwahara, M., 1981, "Simple Stability Criteria Ibr Single and Composite Linear Systems with Time Delays," Internal J. Control, Vol. 34, pp. 1175-1184.
8 Patel, N. K., Das, P. C , and Prabhu, S. S., 1982, "Optimal Control of Systems Described by Delay Differential Equations," Internat. J. Control, Vol. 36, pp. 303-311.
9 Hsiao, F. H., Hsieh, J. G., and Wu, M. S., 1991, "Determination of the Tolerable Sector of Series Nonlinearities in Uncertain Time-Delay Systems Under Dynamical Output Feedback," ASME JOURNAL OF DYNAMIC SYSTEMS, MEASURE-MENT, AND CONTROI,, Vol. 113, pp. 5 2 5 - 5 3 1 .
10 Chen, B. S., and Dong, T. Y., 1988, "Robust StabiMty Analysis of Kalman Filter Under Parametric and Noise Uncertainties," Internat. J. Control, Vol. 48, pp. 2189-2199.
11 Nahi, N. E., 1978, "Bounding Filter; A Simple Solution to Lack of Exact A Priori Statistics," IEEE Trans. Information and Control, Vol. 39, pp. 212-224.
12 Kassam, S. A., Lim, T. L., and Cimini, L. J., 1980, IEEE Trans, on Geosci-ence and Remote Sensing, Vol. 18, pp. 331-336.
13 Poor, v., and Looze, D. P., 1981, "Minimax State Estimation for Linear Stochastic Systems with Noise Uncertainty," IEEE Trans. Automat. Control, Vol. 26, pp. 902-906.
14 Morris, J. M., "The Kalman Filter: A Robust Estimator for Some Classes of Linear Quadratic Problems," IEEE Trans, on Information Theory, Vol. 22, pp. 526-534.
15 Chen, C. T., 1984, Linear System Theory and Design, Saunders College Publishing, Orlando, FL.
16 Desoer, C. A., and Vidyasagar, M., 1975, Feedback Systems: Input-Output Properties, Academic Press, New York.
A P P E N D I X
Tiie solution x{k) to Eq. (3.7) is expressed as
x{k) = A'xiQ) + I A'-J-'/^AiJ)xU)
and
AC„(;fc) = [0 0.03 sin {k)\ is shown in the Fig. 1.
+ I A*-^-'//«(;•). (A.l) j=0
Taking norms on both sides of ( A . l ) , we obtain
5 Conclusion
A robust Kalman filter is introduced in this present study by properly defining new state variables for discrete multiple time-delay stochastic systems with parametric and noise uncertain-ties. Minimax theory and Bellman-Gronwall lemma are em-ployed on the basis of upper norm-bounds of parametric uncer-tainties and noise unceruncer-tainties. A robust criterion is conse-quently derived which guarantees the asymptotic stability of the uncertain stochastic system. Design procedures are finally elaborated upon with an illustrative example.
Acknowledgment
The authors wish to express sincere gratitude to the anony-mous referees for their constructive comments and helpful sug-gestions which led to substantial improvements of this paper. This research work was supported by the National Science Council of the Repubhc of China under contract NSC82-0113-E-155-055.
References
1 Alford, R. L., and Lee, E. B., 1986, "Sampled Data Hereditary Systems: Linear Quadratic Theory," IEEE Trans. Automat. Control, Vol. 31, pp. 60-65.
2 Feliachi, A., and Thowsen, A., 1981, "Memoryless Stabilization of Linear DelayDifferential Systems," IEEE Trans. Automat. Control, Vol. 26, pp. 5 8 6 -587.
3 Wang, S. S., Chen, B. S., and Lin, T. P., 1987, "Robust Stability of Uncertain Time-Delay Systems," Internat. J. Control, Vol. 46, pp. 963-976.
\\x{k)\\ = ||A*x(0) + I A*"^"'AA(;W;)
k-\
+ i : A * - - ' - ' H n ( 7 ) l | - | | A ' | | | | x ( 0 )
+ II|A'-^'-'||||AA(;)|||U(i)||
+ I A'-^""' II//II ||«(y)||. (A.2)
Similarly, taking norms on both sides of ( 3 . 8 c ) - ( 3 . 8 e ) , we have the following inequalities:||AA(^)|| < ||AA(^)|| + ||AA"(fc) - FAC(fe)||
< 2 ||AA(fe)|| + m ||AC(A:)!| == 2 I ||AA,.(/:)||
m
+ \\F\\ ||AC,(A:)|| < 2 ( a + I 77,) + p | | ^ | (A.3) 1=1
\m ^ 2 + iji^i (A.4)
\\n{k)\\ < |K*)II + \Hk)\\ < \\v{k)\\ + \Hk)\\
< [tr(/f,o + e,/)J"^ + [tr(i?2o + £ 2 / ) ] ' " . (A.5)
Substituting (3.13) and the inequalities ( A . 3 ) - ( A . 5 ) into (A.2) yields ft-l m \\x{k)\\ s Mr'||A:(0)|| + X Mr'^'^' {2(a + S J?,) 7 - 0 ;=i
+ p|l^|]|W;)ll + I Mr'-^-'(2 + Ij^l)
X {[tr(/e,o + e , / ) ] ' " + [tr(/f2o + e^/)]"^) Multiplying both sides of (A.6) by r"* leads to
k— I m ||x(A:)||r-' £ M||;c(0)|| + X Mr"^"' [2(cr + 1 7 ? , ) ; = 0 1=1 + p\\m\\xU)\\ + I A/r-^-' (2 + \\m J=o {[tr(«,o + e , / ) ] ' " + [tr (^20+ £ ? / ) ] ' " ) The inequality (A.7) can be changed to
\\x(k)\\r-'' < A^|x(0)|| + M- •(2 + imi) r - 1 X {[tr (/?,o + £ , / ) ] ' « + [tr (R20 + £2/)]'"} k-l m
+ I Mr-' [2(cr + I 77.) + /'WlllkOOIk^
j = o 1=1 (A.6) (A.7)X {[tr(ff,o+ £ , / ) ] " ' + [tr(ff2o + e2/)]'") (1 + h)' - I r{l + hY -
r'-in which
h{r - 1) (r - l ) [ r ( l + /z) - 1]
/ ! ^ M r - ' [ 2 ( f f + S 7 7 , ) + P W | ] .
(A.9)
Multiplying r* to both sides of (A.9), we get the following result:
\\x{k)\\ ^ MA\x{m +
M'-^(2
+ wm
X {[tr(/?,o + £ , / ) ] " ' + [tr(/?2o + £2/)]"'} + A/||x(0)||[r(l + /i)]* - M / | | x ( 0 ) | | + M(2 + ||F||) X {[tr(/?,o + £,/)]"^ + [tr(/;2o + £2/)]"'} - M(2 +11.^1){[tr(/?,o + £ i / ) ] ' " [ r ( l + /?)]' - r' r - 1 (A.8)Applying Lemma 3.2 to (A.8), we obtain the following in-equality:
Mk^r-' < M||;t(0)|| + M ^ ^ ^ (2 + WD
r - 1 X {[tr (i?,o + e i / ) ] " ' + [tr {R20 + £2/)]'"} + M||x(0)||[(l + h)' - 1] + /!M(2 + IIFll) . [ t r ( ^ 2 o + £ 2 / ) ] - ) ; ' ^ ^ , \ ; " ^ f ; ; : ' . (A.IO) (/• - l ) [ r ( l + h) - 1]As & approaches infinity, ||x(fc)|! will approach to a certain value M[2((T + i:»7/) + pl|J^I|]
M(2 + ll^l)
1 - r 1 + r + M[2ia + I r?J + p||^|] - 1
X { [ t r ( ^ , o + £ , / ) ] ' " + [tr(/?2o + £ 2 / ) ] " ' } , ( A . l l ) because 0 < r < 1 and | r ( l + h)\ < 1. Thus, the system (3.7) is robustly stable.
![Fig. 1 Simulation of robust Kalman filter under parametrical and noise uncertainties in the example with true state x = [X1X2X3X4]'^ with initial condition [1 0.9 0.35 0.75]'^ and state estimate x = [*iX2X3X4]'^ with initial condition [-0.95 0.85 - 0.45](https://thumb-ap.123doks.com/thumbv2/9libinfo/7874595.154969/5.918.109.449.52.354/simulation-kalman-parametrical-uncertainties-example-condition-estimate-condition.webp)
