行政院國家科學委員會專題研究計畫成果報告
無人遙控潛器操控之虛擬環境模擬與建構(
3/3)
A Simulation Environment for Remotely Operated Vehicles
Operation (3/3)
計畫編號:NSC 93-2611-E-110-002
執行期限:93 年 8 月 1 日至 94 年 7 月 31 日
主持人:陳信宏
國立中山大學海下技術研究所
計畫參與人員: 張旭輝 國立中山大學海下技術研究所
江金源 國立中山大學海下技術研究所
陳柏棋 國立中山大學海下技術研究所
一、中文摘要 本計畫之目的在於開發 ROV 感測資 訊監控介面以及開發 ROV 操控模擬訓練 介面,以提高 ROV 操作員的作業效率、 達到安全導航、以及達到更具彈性、更經 濟的ROV 操作訓練的目的。在此目標下, 本計畫完成建構虛擬實境介面顯示軟體、 ROV 動態數學模式、以及 ROV 操控訓練 模擬介面設計,同時也完成 ROV 操控之 虛擬實境介面顯示軟體與感測硬體介面的 整合,且根據實海域測試結果,本系統已 成功地擷取感測器資料,並且能夠忠實呈 現ROV 的運動狀態與水下位置。在 ROV 操控訓練系統發展方面,本計畫也完成了 操控訓練系統相關模組設計,包含場景編 輯系統、任務編輯系統、動態模擬系統、 以及碰撞偵測系統。ROV 操作員可依實際 作業需求設定場景的環境參數、地形,並 能於場景中自行設計物件,且操作員能利 用系統提供的任務指令,設計不同的操控 訓練任務。此外,以 ROV 動態數學模式 為基礎所發展的動態模擬系統,不僅能模 擬 ROV 的動態行為,而且能配合碰撞偵 測呈現 ROV 的碰撞反應。根據建構的操 控模擬系統,本論文也探討作業環境、軌 跡顯示輔助、以及定位誤差等因素對ROV 操控的影響程度,並運用田口方法及變異 分析來了解不同操作條件對 ROV 操控的 影響效果,實驗結果顯示能見度對於操作 員操控 ROV 進行任務的影響最大。整體 而言,本計畫已經達成預定進行之研究目 標,而且此套 ROV 監控與訓練系統將能 有效減輕操作員的作業負擔,也有助於提 升作業效率。 關鍵詞:無人遙控潛器、虛擬實境、水下 定位、操控訓練 AbstractThe major goal of this project is to develop two interfaces; one for ROV monitoring and navigation, and another for ROV pilot training. The developed monitoring and navigation interface includes sensor readings, 3D virtual environment display, 2D trajectories display, and functions of data recording and mission replay. The needed hardware such as compass, pressure sensor, ultra-short baseline positioning system, DGPS, and clinometer are integrated to the interface for aiding ROV pilots to guide the vehicle. According to the result of sea trial, it was found that this system can successfully receive all sensor data and display them in the monitoring interface. For the ROV training system, several modules have been built for achieving vivid and diverse simulations for pilot training. These modules include scene editor, mission editor, dynamic simulator and collision detection system. This training system allows the user to change ambient light intensity, visibility, current speed, and seafloor topography for
fulfilling specific training requirements, and provides the user with commands for mission planning. Besides, the dynamic simulator combining the nonlinear hydrodynamic equations of motion and collision detection system could simulate the effects of collision between ROV and other objects. By utilizing the ROV training system, the effects of underwater condition, ROV trajectory display, and ROV positioning error on the ROV maneuverability have been studied. It was found that the underwater visibility has greatest influence on the ROV pilot performance. In conclusion, the goals of this project are achieved and the results can help ROV pilots to guide ROV efficiently and safely.
Keywords: ROV, virtual environment,
underwater positioning, pilot training 二、動機與目的 當 ROV 進行水下作業時,操作員無 法直接目視ROV,所以 ROV 的狀態與動 作需要藉由感測資訊來判斷,例如水深、 影像、ROV 航向,ROV 水下定位、支援 工作船的艏向以及GPS 座標等等,這些資 訊的呈現方式,不僅會影響 ROV 的操控 效率,也會涉及 ROV 能否安全地被導引 至目的地。感測資訊若以單純的數字來呈 現,對於操作員掌握 ROV 位置與動態特 性的侷限很大,特別是對於實際操作經驗 不足的 ROV 操作員,更是難以將大串數 據資料直接轉換為 ROV 的三度空間位 置。舉例來說,在1999 年德基水庫失事直 昇機的搜尋過程中[1],操作員只能依靠深 度數據、航向數據、以及 ROV 的攝影機 所提供的影像來判斷 ROV 之位置,並下 達操作命令。但是因為水庫底部污泥混 濁,使得攝影機的視野大受影響,而且因 為不能掌握 ROV 的移動軌跡,所以常重 複搜尋相同的區域,以致浪費了許多寶貴 的時間及人力。 事實上,人類對於圖像的理解能力比 對文字的理解能力更快更直覺,所以如果 可以將感測器數據資料整合之後直接以圖 像方式呈現,將有助於 ROV 操作員理解 與掌握 ROV 的位置資訊。此外,在操控 ROV 的過程中,ROV 的位置資訊隨時在 改變,所以 ROV 的位置也最好能夠以動 態圖像的方式來呈現。所以為了提升ROV 的操控安全與操控效率,本研究不僅要發 展出一套可以提供 ROV 感測資訊的監控 介面,而且要利用虛擬環境在視覺上的優 點,將擷取的各種感測資訊整合在虛擬環 境中,讓操作員可以直覺地、輕易地掌握 ROV 的動態與行蹤。 此外, ROV 的操控需要藉由長時間 的演練才得以熟稔儀器的操作與 ROV 的 控制,但是 ROV 的實務操作經驗取得大 多經由實際水域操作來累積。受限於實地 操練所需的時間、空間、大量花費、後勤 支援、以及丟失貴重 ROV 的風險,大部 分的操控經驗都是從工作中累積得來的 (On the job),所以具備一套安全、有效 率、又節省成本的 ROV 操作訓練系統是 有其必要性的。所以本計畫另一個目標就 是要發展一套 PC-Based 任務模擬訓練介 面,不僅能克服天候、成本、以及儀器遺 失風險的缺點,更能在便利舒適的訓練環 境與精細的 ROV 動態模擬下,有效率地 提升操作員的作業技巧。 三、相關文獻 除了以文字方式呈現之外,ROV 感測 資訊最好是利用精細的動態圖形介面來呈 現,而動態圖形介面的呈現則需藉助於虛 擬實境(Virtual Reality)技術 [2-4]來提供 直覺地、互動地視覺效果。由於電子科技 的快速發展,使得電腦運算效率不斷增 快,電腦圖形處理的能力也與日遽增,促 使虛擬實境技術的應用越來越廣泛,包括 教育 [5-7]、醫學 [8, 9]、建築 [10-12]、 以及軍事 [13, 14] 都不難發現虛擬實境 技術的應用。此外,虛擬實境在海洋工程 領域也能扮演相當重要的角色,例如,能 見度對 ROV 的操控效率影響非常大,然 而電腦虛擬的作業環境卻能提供無限視野
[15],對於提升 ROV 的操作效率能有很大 的貢獻,雖然如此,虛擬實境技術在海洋 工程的相關應用也是從近年才有逐漸增加 的趨勢,例如在近海工業上利用虛擬場景 的模擬與相關儀器的配合來進行水下作業 [16, 17],以改善儀器操作人員對時間和空 間的感知能力,同時也可以節省成本與避 免不必要的危險發生。 虛擬實境在自主式潛器 AUV 的系統 發 展 與 模 擬 上 也 扮 演 相 當 重 要 的 角 色 [18]。由於以往 AUV 的導航、通訊、辨識 等等的控制演算皆是藉由實際海域作業來 診斷,不僅沒效率,也不經濟。此外,AUV 的功能日趨複雜,控制理論也越來越難達 成實際的應用,為了能快速診斷 AUV 複 雜控制演算的錯誤,同時提高演算系統的 強健性,需要一個精確、有效率、低成本、 以及高階使用者介面的模擬系統 [18],所 以虛擬實境技術在 AUV 的相關應用上, 大部分集中於 AUV 系統整合與軟體發展 為主 [19-21]。由於電腦運算的限制,時常 需要透過許多電腦共同執行演算模擬、資 料擷取、以及顯示,此外,AUV 的測試往 往涉及多位工程師與研究人員,所以分散 式虛擬環境運用於 AUV 設計的概念於焉 產生 [22, 23],透過網路的協助,工程師 與研究人員可以在分散式虛擬環境中共同 參與 AUV 的設計與測試。為了進一步獲 得 AUV 在實際環境的操作經驗,另一方 面又可以免於執行複雜的 ROV 動態模 擬,「合成世界」(Synthetic World; Hybrid Simulation Environment)的概念便被提出 [24-26]。不過由於 AUV 與 ROV 的操控特 性畢竟不一樣,所以這些應用於 AUV 的 人機介面發展較著重於跨平台、以及展示 AUV 在空間中的動態模擬,不像 ROV 與 操作者之間有相當密切的互動,所以上述 這些 AUV 虛擬測試系統在人機互性動上 的研究則著墨甚少。 在ROV 操控訓練相關研究方面,1995 年 Kuroda 等人於研究室中架構了一個虛 擬的水下環境,用來測試 Twin-Burger 的 效能[27]。1997 年,Pioch 等人利用 Open Inventor 來架構虛擬實境,為 ROV Talon
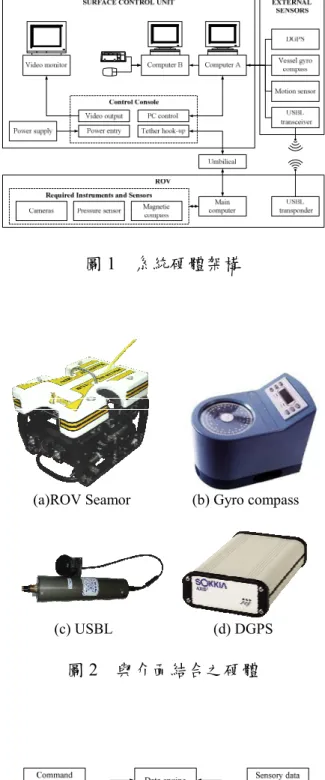
開發了一套操控訓練系統[28]。此外, Wang 等人在 2000 年也利用 LabVIEW 建 構了一套水下載具的操作訓練和控制系統 [29],強調其具有力量回饋控制功能,並 藉由動力回饋搖桿來模擬操作水下載具碰 撞障礙物時所產生的震動效果,不過此系 統的最大缺點是沒有計算水下載具的動態 模式,所以無法確實呈現水下載具被操作 時的動態行為。要結合虛擬實境發展ROV 的操控訓練介面,就必須能逼真模擬ROV 的動態特性。ROV 動態特性的研究,可以 從許多文獻找到相關資料[30, 31],不過最 常被引用的還是 Fossen 所發展出來的動 態數學模式[32]。為了更進一步描述 ROV 操縱過程中與障礙物碰撞的反應,也有相 關研究可供參考[33],這也是本計畫欲達 成的目標之一。 四、研究成果 本研究之成果主要是建立了 ROV 監 控與訓練介面軟體,包括 ROV 操控之虛 擬實境顯示介面、ROV 動態模擬、以及 ROV 操控訓練模擬介面。在完成軟體介面 與感測硬體整合之後,已進行實海域系統 測試,除了成功擷取感測資料並將之整合 於虛擬實境介面之外,也成功地輔助操作 員達成 ROV 導航的工作。以下就各項完 成之相關成果一一做介紹。 (一)硬體架構 圖 1 所示為 ROV 感測資訊監控介面 發展之硬體架構,主要的硬體包含ROV、 水面控制單元、以及外部定位感測器。 ROV 上配備前視彩色 CCD 攝影機,可以 提供水下動態影像畫面。ROV 上也內建壓 力計和磁羅經,可提供 ROV 作業水深與 航向等資訊。視訊、水深、以及航向等資 料經過 ROV 主控電腦處理轉換為數位資 料之後,便透過電纜傳至水面控制單元。 明顯地,僅有深度和航向資料是無法 得知ROV 的絕對位置。要獲得 ROV 的絕 對位置,最簡單的方法是取得工作母船的 絕對位置,同時取得 ROV 相對於工作母 船的位置。所以本研究外加了一些感測器
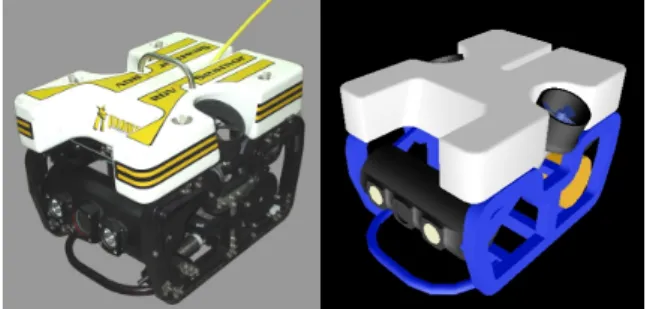
為了達此目的,這些外加的感測器包括 DGPS、電羅經、運動感測器、以及超短 基線定位系統。DGPS 用來量測工作母船 的絕對位置,電羅經則用來量測工作母船 的航向,而工作母船與 ROV 之間的相對 位置則是利用超短基線水下定位系統來量 得。超短基線水下定位系統主要包含了一 個 收 發 器 (Transceiver)和一個應答器 (Transponder), 收發器固定於船底或 船舷邊(沒入水中),應答器則是裝載於 ROV 上。應答器備有自給電源,透過聲學 訊號與收發器溝通。至於運動感測器則是 用於量測工作母船的姿態,包括俯仰角 (Pitch)與橫搖角(Roll)。圖 2 為本介 面所結合之硬體設備。 水面控制單元包含 ROV 控制台、電 源供應器、視訊監視器、以及圖形顯示介 面。ROV 控制台上有各種形式的開關與搖 桿可以控制 ROV 的燈光、攝影機、推進 器出力等功能,也有感測器傳輸介面可以 輸出 ROV 狀態資料與輸入 ROV 控制命 令。視訊監視器可以顯示 ROV 拍攝的水 下影像畫面,同時將深度與航向資訊重疊 於影像上。圖形顯示介面利用RS232 介面 接收水面控制台傳送出來的 ROV 感測資 訊,包括ROV 深度、航向、俯仰角(Pitch)、 以及橫搖角(Roll)等,圖形顯示主控電腦將 這些感測資訊整合之後顯示於虛擬實境顯 示介面上。圖形顯示主控電腦將 ROV 上 傳的感測資訊與外部感測資訊整合之後, 便可以估算出ROV 的水下位置,並以 3D 和2D 的虛擬實境與圖示顯示於 ROV 監控 圖形介面上。 (二)軟體系統整合架構 本研究所發展的軟體架構如圖 3 所 示,包含感測資料融合、動態模擬、以及 圖形顯像三個獨立的處理程序。感測資料 融合與動態模擬皆提供資料輸入的接收 點,只不過感測資料融合是接收實際感測 器資料,動態模擬則是接收搖桿的資訊, 圖形顯像則是接收從感測資料融合與動態 模擬程序輸出的導航資訊。感測資料融合 由RS232 接收感測資料後,先進行資料抽 圖1 系統硬體架構
(a)ROV Seamor (b) Gyro compass
(c) USBL (d) DGPS 圖2 與介面結合之硬體
取,獲得有意義的感測資料之後再將之進 行融合,得到較為可信的ROV 定位資料。 當 ROV 定位資料傳送至圖形顯像處理程 序時,圖形顯像處理程序一方面將 ROV 定位資料儲存於資料庫,另一方面則利用 接收的資訊來更新導航資料,一旦導航資 訊更新之後,3D 與 2D 圖形場景也會隨之 更新。而資料庫內所儲存之 ROV 定位資 料,還可以用於事後播放 ROV 整個運動 程序,瞭解ROV 在任一時刻的運動狀態。 至於動態模擬程序則是利用 DirectX API 來處理搖桿輸入的操控資訊,透過動態模 擬將搖桿送出的推進器推力大小換算為 ROV 的動態位置,再將 ROV 動態位置傳 入圖形顯像處理程序,以進行 ROV 導航 資訊更新。同時,動態模擬程序中也隨時 計算 ROV 與場景中障礙物的相對位置關 係,以偵測 ROV 是否與其他障礙物發生 碰撞,一旦碰撞發生,ROV 動態模式會計 算出碰撞反作用力的大小,再將反作用力 轉換為力回饋搖桿的震動輸出,提醒操作 者碰撞狀況的發生。 (三)ROV 定位 整個介面系統能否發揮其功效的關鍵 之一在於定位的精確度,包括水面定位與 水 下 定 位 。 在 水 面 定 位 方 面 可 以 藉 由 DGPS 達成工作船的定位,水面下的定位 則藉由聲學定位來達成。聲學定位大致可 分為長基線(Long baseline)、短基線(Short baseline)、以及超短基線(Ultra short baseline) [34],其區別在於基線(Baseline) 的距離。雖然長基線可以獲得非常精準的 水下定位,但其成本高、而且佈放與校正 費時。所以若從成本、佈放效率來看,超 短基線是非常適合做ROV 的水下定位的。 為了方便求出 ROV 的絕對座標,我 們 訂 定 了 四 個 座 標 系 統 S x y z 、0( , , )0 0 0 1( , , )1 1 1 S x y z 、S x y z 、 2( , , )2 2 2 S x y z ,3( , , )3 3 3 如圖4 所示。其中,S0是大地固定座標系 統(例如WGS84),S1也是固定座標系統, 不過其原點位於工作母船的質心。S2則是 附隨於工作船上的動座標系統,其質心位 置與 S1系統相同。至於 S3是則是附隨於 Horizo ntal Ra nge (H r) Sla nt R an ge (S r) 圖4 ROV 定位座標系統 USBL 的動座標系統,其原點位於 USBL 收發器上。令 P0 為 DGPS 接收到的全球 定位座標: 0 0 , 0 , 0 , 1 T x y z P P P = P (1) r2 為 DGPS 接收器在 S2座標系統下的位 置向量: 2 2 , 2 , 2 , 1 T x y z r r r = r (2) P2為USBL 收發器在 S2座標系統下的位置 向量: 2 2 , 2 , 2 , 1 T x y z P P P = P (3) 而P3為USBL 應答器在 S3座標系統下的 位置向量: 3 3 , 3 , 3 , 1 T x y z P P P = P (4) 根據圖4 的參數定義,工作船的航向、俯 仰角、以及橫搖角分別以ψ 、θ、φ 來表示, 所以當船有連續的橫搖、俯仰、以及航向 等旋轉運動時,座標系統S2的旋轉矩陣可 以表示為: 2
cos sin 0 0 cos 0 sin 0 1 0 0 0 sin cos 0 0 0 1 0 0 0 cos sin 0 0 0 1 0 sin 0 cos 0 0 sin cos 0 0 0 0 1 0 0 0 1 0 0 0 1 ψθφ ψ ψ θ θ ψ ψ φ φ θ θ φ φ − − = − T (5)
此外,由座標系統 S2至座標系統 S1的轉 換矩陣為: 12 2 0 1 0 0 1 0 0 0 0 0 1 0 0 0 0 1 ψθφ = − T T (6) 由座標系統 S3至座標系統 S3的轉換矩陣 則為: 2 2 23 2 1 0 0 0 1 0 0 0 1 0 0 0 1 x y z P P P = T (7) 進行水下定位時,USBL 通常會提供斜距 (Slant range)、方向角(Bearing angle)、 以及俯角(Depression angle)等資訊。在 此,我們分別以Sr、α、β來表示斜距、方 向角、以及俯角。所以再求取ROV 的位 置時,可以先由Sr和β求出水平距離 Hr (Horizontal range): cos r r H =S β (8) 而 ROV 在座標系統 S3下的深度則可以表 示為: 3z rsin P =S β (9) 所以 ROV 在座標系統 S3下的位置則表示 為: 3 3 3 3 3 cos sin 1 1 x r y r z z P H P H P P α α = = P (10) 將 ROV 的位置向量由座標系統 S3轉換至 座標系統 S0,則可以求得 ROV 的絕對座 標位置: 0 12 2 12 23 3 = − + P P T r T T P (11) (四)導航介面 本研究所開發的 ROV 操控導航介面 如圖5 所示,它包含了下拉式的功能表、 兩個圖形導航區、以及一個感測器讀數顯 示區。左上角的圖形導航區是用來顯示3D 虛擬實境場景的,場景包括研究船、ROV 、地形、以及操作員自訂的 3D 物件。右 上角的圖形導航區主要是用來顯示 2D 的 ROV 運動軌跡和工作船航跡。至於下方的 感測器讀數區則包括了水下定位系統、 DGPS、船體姿態、船的航向、ROV 航向、 以及ROV 深度等資訊。 1. 虛擬場景 為了讓操作員容易瞭解ROV 與工作母 船之間的空間相對位置,所以左上角的 圖形導航區負責顯示 ROV、工作船、 以及海底地形,而且是以三度空間的虛 擬場景來呈現。不論是ROV、工作船、 或是地形,皆是以許多的多邊形面來建 構。以 ROV 來說,其 3D 模型是是根 據 Inuktun Services Inc. 所 製 造 的 Seamor ROV 來建構的,它也是中山大 學海下所目前擁有的 ROV,其照片與 建構後的3D 模型如圖 6 所示。工作母 船的3D 模型則是根據中山大學海研三 號研究船來建構的(圖7),其建構後 的3D 模型如圖 8 所示。至於海底地形 方面,本介面也根據多音束測深系統實 測的地形資料,建構了一些台灣周遭海 域的地形。例如圖9 所示為台南安平外 海的船礁區地形,地形上的突出物皆為 船礁,其地形解析度為一公尺。除了大 陸棚區域外,台灣周遭海域地形變化相 圖5 ROV 操控導航介面
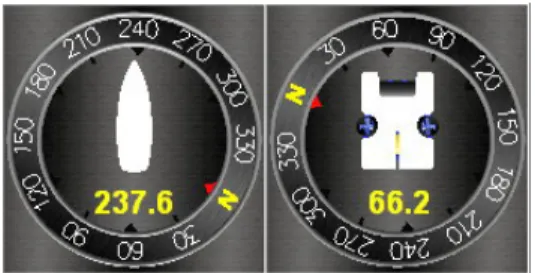
圖6 ROV Seamor 照片(左)與 3D 模型(右) 圖7 海研三號研究船 圖8 海研三號研究船 3D 模型 圖9 安平外海船礁區地形 當大,所以需要解析度數公尺以下的地 形資料才較適合ROV 導航。然而台灣 周遭海域要取得數公尺以下的地形資 料並不容易,而且資料量也會相當龐 大。所以本介面開發了地形資料讀取系 統,只要隨時取得新地形資料,並將地 形資料建構成目前普及的 VRML 格 式,便可經由此系統讀取地形資料,並 直接顯示於 3D 圖形介面上。如此一 來,本介面程式便不會因3D 地形資料 龐大,而造成介面程式無法編譯,也可 以降低介面程式執行檔案的大小。此 外,一旦資料庫中沒有ROV 作業當地 的地形資料,本介面也可以讓操作員自 行建構一個平坦的地形來代替,其深度 可以參考工作船上 Echo sounder 的資 料或是ROV 深度計資料來設定,其地 形範圍大小可以隨作業需要而變更,而 且地形的材質貼圖也可以隨意變化。圖 10 所示為自行設定之平坦海底地形。 2. 感測資料顯示 在介面下方的圖形讀數區,主要分為五 個區塊。其中四個區塊是分別用來顯示 水下定位系統、DGPS、ROV 位置、以 及船體姿態,另外還有一個區塊是用來 顯示ROV 的航向和工作船的航向,如 圖11 所示。此外,ROV 與工作船的航 跡也顯示在右上角的圖形導航區中,如 圖 12 所示。透過 ROV 與工作船的航 跡顯示,可以清楚掌握ROV 的作業路 徑。此外,由於ROV 軌跡為 2D 顯示, 圖10 操作員可以自行設定平坦地形並 指定地形之貼圖材質
圖11 工作船航向與 ROV 航向顯示 圖12 ROV 軌跡與工作船軌跡顯示 為了同時顯示軌跡的深度資訊,所以 ROV 軌跡線會根據 ROV 當時的作業 深度而以相對應的顏色的顯示,所以透 過2D 導航區右邊的色彩深度對應,便 能得知ROV 各個航跡點的深度。 3. 功能表 除了圖形顯示功能之外,導航介面還具 備其他互動功能,讓ROV 操作者可以 藉由調整介面顯示設定來達到最合適 的作業條件與顯示效果。這些功能如圖 13 所 示 , 包 括 「 Operation 」 、 「Communication」、「Viewing」、 「Display」 、 「 Drawing」 、 「Data recording 」 、 「 Navigation aids 」 、 「Playback utility」等八部分,以下分 別說明其功能。 (1) Operation 主要是考慮感測資料與 介面連結的方式,一種是將感測 器直接接上介面來接收(Direct connection)並擷取所需感測資 訊;另一種則是由另一台電腦直 接接收並擷取感測資料,再將整 理後的感測資料傳到介面上。 Communication Viewing Navigation aids Playback utility Data recording ROV GPS Positioning system Gyro compass Third-person perspective First-person perspective Trace display Depth color ROV status Ship status Load data Play control Viewing Graphical interaction Panning Zooming Rotating ROV Ship Concentric circle offset
Functionality
Operation
Distributed computation Direct connection
Motion sensor Direct data input
Top view Display Terrain Ship Objects Load terrain User defined Cuboid Sphere Cone Cylinder Torus Drawing Line Rectangle Polygon Circle Ellipse 圖13 介面功能表 (2) Communication 是負責與各個感 測器之間的通訊。若感測器直接 接 上 介 面 , 則 所 需 的 序 列 埠 (Serial port ) 通 訊 對 象 包 括 ROV、定位系統、DGPS、電羅經、 以及運動感測器;若是間接接收 感測資料,則只需負責另一台感 測資料傳送電腦的序列埠通訊。 (3) Viewing 在介面中是用於切換 3D 虛擬實境中的觀測位置,主要有 第 一 人 稱 視 角 ( First-person perspective ) 與 第 三 人 稱 視 角 (Third-person perspective)可供 切換。第一人稱視角的觀測點位 在ROV 的攝影機上,相當於是透 過 ROV 攝 影 機 來 觀 看 虛 擬 場 景。第三人稱視角的觀測點位於 ROV 之外,可以同時觀測 ROV、 工作船、以及其他虛擬場景,所
以較適合用來輔助ROV 導航。當 以第三人稱視角顯示時,可以利 用滑鼠來縮放、平移、以及旋轉 虛擬場景,藉此調整最佳的觀測 角度。 (4) Display 用來顯示不同的工作船與 不同的地形,同時也可以讓操作 員建構各種形狀的物件佈放於場 景之中。工作船的顯示是以海研 三號為模型所建構的,為了考量 電腦的運算效能,所以有簡易的 和精緻的兩種海研三號模型可供 操作員選用。若是電腦的顯示運 算效能較差,可以選擇簡易的海 研三號模型來顯示;若是電腦的 顯示運算能力較強,則可以選擇 精緻的海研三號模型來顯示。在 地形顯示方面,操作員可以讀取 資料庫中的任何地形資料,資料 型態以VRML 檔案來儲存。為了 顧及電腦的顯示運算效率,同一 區的地形資料也有許多不同解析 度可供選擇。此外,為了輔助操 作員辨認或標記海底特殊地物或 特徵,在Display 中也提供一些基 本模型可供操作員建置於 3D 虛 擬場景中,這些基本模型包括長 方體(Cube)、球體(Sphere)、 錐體(Cone)、圓柱體(Cylinder)、 以及環形圓紋體(Torus)。圖 14 為在一平坦地形中建構一些 3D 模型,這些外加的3D 模型如同地 標一樣,有助於ROV 導航。 (5) Drawing 包含了線、長方形、多邊 形、圓形、橢圓形等繪圖功能, 用於 2D 圖形介面中輔助操作員 進行目標物標記,也可以輔助測 線規劃。
(6) Data recording 用來記錄 ROV 的 所有運動狀態,也用來記錄工作 船的運動狀態。記錄的資料包含 了日期、時間、GPS 座標、ROV 的 TM2 座標、船艏向、ROV 航 向、USBL 定位資料、船體姿態、 ROV 水深、ROV 姿態等。 (7) Navigation aids 用於輔助操作員 來導航ROV,其功能包含了 ROV 運動軌跡顯示、工作船運動軌跡 顯 示 、 軌 跡 顯 示 顏 色 隨 深 度 變 化、以及水表面輔助格線顯示。 (8) Playback utility 用來重播 ROV 作 業歷程的一舉一動,如圖 15 所 示。重播介面包含功能表、3D 顯 示、2D 顯示、以及感測數據資料 顯示。在功能表中可以開啟任一 航次之感測儲存資料,重播介面 會自動計算資料長度(ROV 作業 時間),同時也具有播放、暫停、 終 止 等 按 鍵 , 可 以 調 整 播 放 速 度。3D 顯示功能則用於顯示工作 船 與 ROV 之間的相對位置關 係,可以透過滑鼠來旋轉和平移 顯示畫面以變更視角,藉由不同 的角度來觀測工作船與ROV,同 圖14 於虛擬場景中建構 3D 物件 圖15 重播介面
時也可以利用滑鼠控制畫面的縮 放 , 以 調 整 到 最 合 適 的 觀 測 畫 面。2D 顯示功能也是用於顯示工 作船與 ROV 之間的相對位置關 係,但僅限於 XY 平面,不過在 2D 畫面中可以顯示 ROV 和工作 船的運動軌跡,同時以不同顏色 來代表ROV 的深度,讓操作者可 以清楚瞭解ROV 行經的區域與其 運動方向。此外,在2D 圖形顯示 面板也可以透過滑鼠來平移顯示 畫面以變更操作員的觀測點,同 時也可以利用滑鼠控制畫面的縮 放 , 以 調 整 到 最 合 適 的 觀 測 畫 面。感測數據資料顯示則是顯示 ROV 當時的航向、工作船艏向、 ROV 座標位置、工作船 GPS 座標 位置、以及水下定位系統的數據 資料。 (五)實海域測試 為了測試 ROV 狀態監控軟體與硬體 介面整合後的運作效果,本計畫進行實海 域導航測試與定位測試。 導航測試最主要的目的是檢驗本系統 是否可以成功顯示 ROV 狀態與定位資 訊,測試地點在高雄永安外海,GRS67 座 標 位 置 為 東 經 120.155582 度 、 北 緯 22.811712 度(圖 16 Site I)。船下錨後, 將USBL 收發器固定於船底,而應答器裝 載於ROV 上,在 ROV 航行過程中,分別 量測斜距、方向角、以及俯角。藉由這些 資訊可以求得 ROV 相對於工作船的位 置,再經由工作船的GPS 座標和艏向,就 可以求得 ROV 在水下的絕對位置。根據 測試結果,此介面成功地掌握了 ROV 在 水下的行蹤,其測試過程之重播畫面如圖 15 所示。 除了進行 ROV 導航測試之外,本介 面也可提供其他載具作為定位監控介面, 例如側掃聲納、底層剖面儀等,所以本計 畫也在高雄外海利用此介面進行水下定位 測試。測試的方法是將USBL 應答器錨碇 於海床,USBL 收發器則固定安裝於工作 船舷外(沒水深度約3 公尺),由工作船 按照指定測線航行,同時接收應答器回傳 的定位訊號,定位訊號經過處理修正後, 便將應答器的定位軌跡顯示於介面上。定 位測試的地點在高雄港以西外海約 20 公 里處,其 WGS84 GPS 座標位置為東經 120.083257 度、北緯 22.539157 度(圖 16 Site II),當地水深約為 350 公尺。根據測 試結果,本介面成功地擷取定位信號,並 將船跡、定位軌跡、以及其他導航資料成 功地顯示在介面上。圖17 為定位過程之重 播畫面,右上方的圖形顯示面板上可以清 楚地顯示工作船航行軌跡(以粉紅色線條 顯示)以及USBL 應答器的定位軌跡(以 白色線條顯示)。理論上定位軌跡應為空 間中一固定點,但從圖中可以看出定位軌 跡是集中於一點附近呈現高斯分佈狀態, 這是因為水下定位變數尚未修正、定位誤 差尚未濾除所造成的結果。 圖16 導航域測試地點之一 圖17 高雄港外海定位測試重播畫面
(六)操控訓練介面 本計畫所開發的ROV操控訓練系統 是由資料庫與模擬系統兩部分所組成。資 料庫共有四種,包括ROV資料庫、地形資 料庫、環境資料庫、以及障礙物資料庫。 模擬系統也有四種模組,包括了場景編輯 系統、任務編輯系統、碰撞偵測系統、以 及動態模擬系統。操控訓練介面是利用 C++程式語言與OpenGL開發的,介面如圖 18所示。ROV操控訓練系統與ROV虛擬實 境顯示介面的不同之處在於ROV位置的 取得方式,在虛擬實境顯示介面中,ROV 的位置是由整合GPS、水下定位系統、磁 羅經、運動感測器以及深度計之資料所決 定,而在ROV操控訓練介面中,ROV的位 置則是利用動態模擬系統建構出來的。在 介面操作上,使用者以改變搖桿的操作位 置以及其他按鈕來模擬推進器的推力大 小,再根據推力大小與出力方向計算出 ROV的加速度、速度、與位置。此外,操 控訓練系統中內含的ROV資料庫、環境資 料庫、地形資料庫、以及結構物資料庫, 可以讓使用者透過鍵盤和滑鼠來變更水下 作業環境,如ROV動力參數、能見度、環 境照度、海流的大小與方向、環境場景建 構、以及地形變換。 在操控訓練系統中的四大系統模組 (場景編輯系統、任務編輯系統、碰撞偵 測系統、以及動態模擬系統)是訓練系統 的核心,以下分別針對各個系統模組一一 做介紹。 1. 場景編輯系統 場景編輯系統如圖19所示。內建3D實 體模型資料庫,操作者可以從資料庫中 選取所需的實體模型,並設定模型的擺 置位置、縮放尺寸、貼圖的材質、以及 擺放的角度。此外,場景編輯系統也能 設定環境參數,如海流流向與流速、能 見度、環境照度、地形與物件之材質 等。系統介面主要分為兩個顯示框,左 邊的顯示框分割成四個子框,其中左上 子框為虛擬環境的上視圖,左下方子框 為虛擬環境的前視圖,右上方子框為虛 擬環境的透視圖,右下方子框為虛擬環 境的右側視圖。右邊的顯示框為虛擬環 境的3D模型清單,列出場景中所有的 3D實體模型,操作者可藉由清單下方 之物件參數設定來更改各物件擺放之 位置、角度、以及縮放尺寸。 2. 任務編輯系統 為了能更方便設計操控訓練任務,本系 統採用劇本檔(Script file)之資料結構 來描述訓練任務的內容。本系統目前依 照ROV推進操控訓練設計了三種指 令,分別為路徑點(Waypoint)、定位點 (Position)、以及鎖定點(Lock),操控訓 練任務便是由這三個指令所組合而成 寫入劇本檔中。使用劇本檔的好處是變 更任務的內容非常容易、具有豐富的變 化彈性,可針對不同的任務需求而改變 劇本檔的內容。 圖18 ROV操控訓練介面 圖19 場景編輯系統介面
3. 碰撞偵測系統 碰撞反應對一個描述物體動態特性的 虛擬實境系統而言,扮演著相當重要的 角色。對於沒有考慮碰撞反應的模擬系 統來說,當兩物體產生接觸之後,兩物 體仍會朝著原先的行進方向移動,在虛 擬實境中便會產生所謂穿牆現象。為了 增 加ROV操控訓練模擬系統的擬真 度,本系統考慮ROV碰撞到物體時所 產生的反應。為了簡化問題,將ROV 視為一長方體,當ROV與固定牆面發 生碰撞,ROV會依原先行進的速度以 及與碰撞面的角度來決定碰撞後的速 度大小與方向。圖20顯示ROV與某一 物件發生碰撞時的狀況,其中r 為質心c 至碰撞點的位置向量,V為ROV質心的 速度,N為碰撞面之法向量,V 為c ROV 碰撞點之速度,其中V 為c1 V 投影在法c 向N上的分量,V 為c2 V 垂直法向量Nc 的分量。由於V=
[
u v w p q r, , , , ,]
T,Vc 可由下列式子求得: c c u p v q w r = + × V r (12) c V 在法向量N方向之投影量為: c• = ∆v V N (13) v ∆ 即為ROV在碰撞方向的瞬間速度 變化量,則碰撞對ROV產生的反作用 力F以及反作用力矩M為: 2 c V 1 c = c• V V N N 圖20 ROV碰撞示意圖 c v m t ∆ = ∆ = × F N M r F (14) 經此碰撞反作用力公式計算後,ROV 能更忠實地呈現碰撞反應,同時也可以 藉此結合動力回饋裝置來輔助ROV碰 撞模擬系統之發展。本系統中的碰撞偵 測系統則是利用免費的3D碰撞偵測函 式庫Coldet來偵測ROV與其他物體的 碰撞。經過計算出的碰撞反作用力將反 回傳系統的動力回饋裝置以觸發適當 的震動,來警示操作者ROV發生碰撞。 4. 動態模擬系統 本系統結合ROV運動方程式與虛擬實 境技術來呈現ROV之動態行為,進而 完成ROV之動態模擬系統。此系統是 操控訓練系統之基礎,可模擬ROV在 水下的動態行為,讓操作員了解ROV 受到海流、阻力、重力、以及浮力之影 響,更可了解ROV的外型以及動力參 數所產生的動態反應。在相關的潛器動 態模式的研究中,以 Fossen [32] 所發 展出來的數學模式最為完備。其ROV 數學模式為: Mv + C(v)v + D(v)v + G = τ& (15) 其中M為ROV以及附加質量之慣性矩 陣,C v( )為ROV以及附加質量之科氏 力與向心力矩陣,D v( )為ROV之阻力 矩陣,G為重力與浮力對ROV所造成的 作用力與作用力矩,τ 為作用在ROV 上之外力以及外力矩,v 為ROV之六 自由度速度向量。若考慮海流的作用 時,ROV數學模式可表示為: ( ) ( ) r+ r r+ r r+ =τ Mv& C v v D v v G (16) 其中v 為r ROV相對於海流的速度。若 要詳細且精確的描述潛器動態模式,所 要考慮的參數非常的多且複雜,在需要 即時反應的ROV操控訓練模擬系統應 用上,並不適合使用複雜且需要大量計 算時間的動態模式。考慮計算精度和時 效性,本系統使用Runge-Kutta method數值方法來求解,並據此完成動態模擬 系統的建構。 (七)影響ROV 操控之重要因子 為 了 進 一 步 探 討 各 種 外 在 變 因 對 ROV操控的影響,本研究在完成建構操控 模擬系統之後,即針對作業環境、軌跡顯 示輔助、以及定位誤差等各項操作條件對 ROV操控的影響程度進行模擬測試。本計 畫運用田口品質方法的實驗設計程序來規 劃操控訓練測試流程,並經由實驗設計程 序及變異分析來了解上述不同操作條件對 ROV操控的影響效果。 ROV操控常用於海下目標物的檢測 與搜索,且希望每次進行任務的效率越高 越好,換言之,越快完成交付之任務越好。 故本計畫將任務設定為操控員操控ROV 在海域中搜索目標物,搜索任務是要求操 作者自工作母船佈放ROV於指定作業海 域後,即操控ROV找尋4個海流計,海流 計於海底位置如圖 21 所示。操作者必須 操控ROV尋找各個海流計,找到海流計後 依規定完成鎖定動作。當完成所有海流計 之鎖定工作後,便返回工作母船,並以從 佈放ROV至返回工作母船之作業時間作 為評量的依據。測試過程中,以軌跡顯示 輔助、能見度、水下定位誤差、以及海流 流速作為可能會影響操作員在此任務中操 控ROV之可控因子。操作員根據交付之任 務在不同設定環境下來操控ROV,越快完 成任務越好。實驗以完成任務花費的時間 作為量測結果,所以選擇「望小特性」做 為量測結果的品質特性。 實驗所選擇之可控因子為軌跡顯示輔 助、能見度、水下定位誤差、以及海流流 速,因子水準則列於表 1。對於軌跡顯示 輔助因子而言,只具有ON以及OFF兩種水 準;ON表示使用軌跡輔助顯示介面,OFF 表示不使用軌跡輔助顯示介面。對於能見 度而言,本系統利用OpenGL內建功能「霧」 的濃度來模擬能見度,因此霧的濃度設定 為0.02、0.08、以及0.14三個水準,這三種 能見度的可視範圍大約為5公尺(圖22)、 10公尺、以及20公尺(圖23)。對於水下 定位誤差而言,本研究將其設定為5、10、 以及15公尺三個水準,此誤差將使介面下 方顯示ROV位置的X座標以及Y座標資訊 不再是ROV的正確位置,而會分別產生最 大為5、10、15公尺的隨機偏移量,該誤差 亦 會 影 響 到 軌 跡 顯 示 介 面 中 之ROV 軌 跡。而海流方向在本實驗中則是固定為往 東流動,而海流流速設定之三個水準分別 為0.5節、1節、以及1.5節。 因為因子數目為4,而且各因子水準數 皆為3,所以根據田口實驗設計乃選用L9 直交表,並將可控因子與水準配置於此直 交表上,分別進行9組不同條件組合之測 試。每一組測試皆記錄操作員完成測試任 務之時間,同時藉此計算出每一組測試結 果的訊雜比(S/N ratio),其結果如表 2 所 示。接著透過變異分析的計算建立出測試 的變異分析表,如表 3 所示。其中SS為各 因子的變動量,v為各因子的自由度,V為 各因子的變異,F為取樣變異比,而ρ則為 因子的貢獻率。最後依據測試的結果繪製 圖21 工作母船與海流計之相對位置 表1 ROV操控測試之可控因子與其水準 因子水準 可控因子 1 2 3 A 軌跡顯示輔助 ON OFF ON B 能見度(Fog Density) 0.02 0.08 0.14 C 水下定位誤差 5m 10m 15m D 海流流速 0.5節 1節 1.5節
圖22 能見度5公尺之虛擬訓練場景 圖23 能見度20公尺之虛擬訓練場景 表2 實驗結果 水準配置 實驗時間(秒) 實驗 次序 A B C D Y1 Y2 Y3 S/N (db) 1 1 1 1 1 631 541 559 -55.24 2 1 2 2 2 672 720 650 -56.66 3 1 3 3 3 869 839 842 -58.58 4 2 1 2 3 705 721 675 -56.90 5 2 2 3 1 754 737 739 -57.42 6 2 3 1 2 789 751 764 -57.70 7 3 1 3 2 630 654 609 -56.00 8 3 2 1 3 681 672 654 -56.50 9 3 3 2 1 736 704 711 -57.11 表3 變異分析結果 可控因子 SS v V F ρ (%) A 軌跡顯示輔助 0.87 1 0.87 6.85 9.81 B 能見度 4.60 2 2.30 18.12 57.41 C 水下定位誤差 1.08 2 0.54 4.25 11.01 D 海流流速 0.88 2 0.44 3.48 8.34 Pooling error 0.12 1 0.12 13.41 Total 7.58 8 100 因子效果圖,以瞭解每一個因子各水準的 影響,以及因子之間對進行任務的影響差 異,如圖24所示。 從變異分析結果可發現,能見度(B) 對於操作員操控 ROV 完成任務的影響最 大,其次為水下定位誤差(C),接著是 軌跡顯示輔助(A),最小的是海流流速 (D)。在本測試中,由於探索範圍非常 大,所以能見度(B)越低則越不容易發 現流速計,且流速計之間的距離非常遠, 航向的誤差累積則可能讓 ROV 操作員迷 失方位,以至於影響到完成任務的時間。 而海流流速(D)對於測試的影響最小, 則可能為海流方向固定,且流速計分散於 四個角落,所以遭遇頂流與順流的次數相 等,故抵消了海流的影響。此外,藉由因 子效果圖,可以找到測試的最佳因子水準 組合為A B C D ,而此因子水準組合亦為1 1 1 1 第一組測試之因子水準組合,同時在該組 測試中亦具有最短的任務完成時間。 五、結論 本研究計畫完成預定執行之工作目 標,共計開發出ROV 虛擬環境監控介面、 ROV 感測資訊重播介面、以及 ROV 操控 訓練介面,更成功整合 ROV 虛擬實境監 控介面軟體與感測硬體。除了ROV 之外, 此介面整合的硬體包括電羅經、DGPS、 運動感測器、水下定位系統。為了驗證 ROV 虛擬實境監控系統的性能,同時瞭解 系統介面的改善空間,本計畫在高雄永安 外海進行了系統的性能測試,測試結果不 僅成功擷取、顯示所有感測資料,並且在 虛擬實境2D 與 3D 圖形介面的輔助下,有 效率地導引 ROV 完成操控任務。而在此 圖24 因子效果圖
次測試中,我們也發覺介面設計上的一些 缺失與不足之處,據此於第三年計畫中進 一步加以改善,不僅功能增加、介面操作 更具彈性與完善,而且更能符合操作員的 實際作業需要。改善後之 ROV 監控介面 也能進一步應用於水下載具之定位監控, 於高雄港外海利用此監控介面進行水下定 位測試,也成功完成水下定位資料之擷取 與顯示。 除了完成開發 ROV 虛擬實境監控介 面之外,本計畫也完成開發 ROV 感測資 訊重播介面。當利用 ROV 虛擬實境監控 介面輔助作業時,作業過程中所有的感測 資料皆會被儲存在感測資料庫中。一旦完 成作業後,便可透過 ROV 感測資訊重播 介面讀取已儲存之感測資訊,如此便可以 重新檢視 ROV 作業的完整過程,對於事 後的作業檢討、任務重新檢視都有很大的 幫助。 而 在 操 控 訓 練 模 擬 介 面 的 開 發 方 面,本計畫以物件導向觀念為基礎來設計 訓練系統之資料結構,讓系統處理流程更 加簡潔與結構化。人性化的介面設計加上 ROV 動態模擬以及碰撞模擬等特色,配上 所設計的操控訓練任務,能有效的增加 ROV 操控員的操控技術。而對於 ROV 進 行水下作業任務時,水下環境狀態、ROV 在水下的定位精準度以及軌跡顯示介面輔 助等操作條件,是影響操作員操控 ROV 的因素。本計畫進一步利用田口方法探討 這些因素影響 ROV 操作員完成交付任務 的程度,並根據測試結果得知能見度對於 操作員操控ROV 進行任務的影響最大。 綜合言之,本計畫成功開發 ROV 操 控訓練之虛擬實境介面,在此虛擬實境介 面的輔助下,ROV 的導航將更安全、更有 效率,而且ROV 操作訓練的時間、空間、 成本也將更具彈性、更經濟。 六、參考文獻 [1] 薛憲文、莫顯蕎、王兆璋、陳信宏、楊光哲, 多音束測深系統及水下遙控載具與水下搜尋 技術之探討-以德基水庫失事 AH-1W 直昇 機為例,海下技術季刊,第九卷第三期,7-14 頁,1999 年。
[2] G. Burdea and P. Coiffet, Virtual Reality
Technology, John Wiley, New York, 1994.
[3] C. Machover and S. E. Tice, “Virtual Reality,”
IEEE Computer Graphics and Applications,
Vol. 14, No. 1, pp. 15-16, 1994.
[4] W. Barfield and T. A. Furness, Virtual
Environments and Advanced Interface Design,
Oxford University Press, New York, 1995. [5] D. A. Bowman, J. Wineman, L. F. Hodges, and
D. Allison, “Designing Animal Habitats within An Immersive VE,” IEEE Computer Graphics
and Applications, Vol. 18, No. 5, pp. 9-13,
1998.
[6] A. Johnson, T. Moher, S. Ohlsson, and M. Gillingham, “The Round Earth Project-Collaborative VR for Conceptual Learning,” IEEE Computer Graphics and
Applications, Vol. 19, No. 6, pp. 60-60, 1999.
[7] A. Johnson, T. Moher, Y. J. Cho, Y. J. Lin, D. Haas, and J. Kim, “Augmenting Elementary School Education with VR,” IEEE Computer
Graphics and Applications, Vol. 22, No.
2, pp. 6-9, 2002.
[8] G. Riva, “Applications of Virtual Environments in Medicine,” Methods of Information in
Medicine, Vol. 42, No. 5, pp. 524-534, 2003.
[9] J. M. Rosen, H. Soltanian, R. J. Redett, and D. R. Laub, “Evolution of Virtual Reality: From Planning to Performing Surgery,” IEEE
Engineering in Medicine and Biology Magazine, Vol. 15, No. 2, pp. 16-22, 1996.
[10] D. Bouchlaghem, H. Shang, J. Whyte, and A. Ganah, “Visualisation in Architecture, Engineering and Construction (AEC),”
Automation in Construction, Vol. 14, No. 3, pp.
287– 295, 2005.
[11] J. Assfalg, A. Del Bimbo, and E. Vicario, “Using 3D and Ancillary Media to Train Construction Workers,” IEEE Multimedia, Vol. 9, No. 2, pp. 88-92, 2002.
[12] A. C. Addison and M. Gaiani, “Virtualized Architectural Heritage: New Tools and Techniques,” IEEE Multimedia, Vol. 7, No. 2, pp.26-31, 2000.
[13] M. Zyda and R. P. Darken, “Projects in VR: the Naval Postgraduate School's Moves Curriculum,” IEEE Computer Graphics and
Applications, Vol. 18, No. 3, pp. 8-11, 1998.
[14] R. B. Loftin, M. W. Scerbo, F. D. McKenzie, and J. M. Catanzao, “Training in Peacekeeping Operations Using Virtual Reality,” IEEE
Computer Graphics and Applications, Vol.
24, No. 4, pp. 18-21, 2004.
[15] R. Zhang, G. Wei, and C. Zhang, “Virtual Reality for Operating Control of Underwater Vehicle,” 1997 IEEE International Conference
on Intelligent Processing Systems, 28-31 Oct.
1997, Beijing, China, Vol. 2, pp. 1756-1759, 1997.
[16] K. Belcher and C. Moore, “3D Graphics Technology Changes Deepwater Installation Practices,” Sea Technology, Vol. 42, No. 1, pp 49-51, 2001.
[17] P. Chapman, P. Stevens, D. Wills, and G. Brookes, “Real-Time Visualization in the Offshore Industry,” IEEE Computer Graphics
and Applications, Vol. 21, No. 4, pp. 6-10,
2001.
[18] D. Gračanin, K. P. Valavanis, and M. Matijašević, “Virtual Environment Testbed for Autonomous Underwater Vehicles,” Control
Engineering Practice, Vol. 6, No. 5, pp.
653-660, 1998.
[19] D. Brutzman, “Virtual World Visualization for an Autonomous Underwater Vehicle,”
OCEANS ’95 Conference Proceedings, 9-12
Oct. 1995, San Diego, CA, USA, Vol. 3, pp. 1592-1600, 1995.
[20] Y. Pang, Y. Shang, and Y. Xu, “Software Design Techniques for the Man-Machine Interface to Autonomous Underwater Vehicles,” Proceedings of the 1998 International Symposium on Underwater Technology, 15-17 April 1998, Tokyo, Japan,
pp. 370-374, 1998.
[21] C. Deltheil, L. Didier, E. Hospital, and D. P. Brutzman, “Simulating an Optical Guidance System for the Recovery of an Unmanned Underwater Vehicle,” IEEE Journal of Oceanic
Engineering, Vol. 25, No. 4, pp. 568-574,
October 2000.
[22] S. K. Choi, S. A. Menor, and J. Yuh, “Distributed Virtual Environment Collaborative Simulator for Underwater Robots,”
Proceedings of the 2000 IEEE/RSJ international Conference on Intelligent Robots and Systems, 31 Oct.-5 Nov. 2000, Takamatsu,
Japan, Vol. 2, pp. 861-866, 2000.
[23] P. Ridao, J. Batlle, J. Amat, and M. Carreras, “A Distributed Environment for Virtual and/or Experiments for Underwater Robots,”
Proceedings of the 2001 IEEE International Conference on Robotics and Automation, 21-16
May 2001, Seoul, South Korea, pp. 3250-3255, 2001.
[24] S. K. Choi and J. Yuh, “A Virtual Collaborative World Simulator for Underwater Robots Using Multi-Dimensional Synthetic Environment,” Proceedings of the 2001 IEEE
International Conference on Robotics and Automation, 21-16 May 2001, Seoul, South
Korea, Vol. 1, pp. 926-931, 2001.
[25] Y. Kuroda, K. Aramaki, T. Fujii, and T. Ura, “A Hybrid Environment for the Development of Underwater Mechatronic Systems,”
Proceedings of the 1995 IEEE IECON,
International Conference on Industrial Electronics, Control, and Instrumentation, 6-10
Nov. 1995, Orlando, FL, USA, Vol. 1, pp. 173-178, 1995.
[26] L. Pollini and M. Innocenti, “A Synthetic Environment for Dynamic Systems Control and Distributed Simulation,” IEEE Control Systems
Magazine, Vol. 20, No. 2, pp. 49-61, 2000.
[27] Y. Kuroda, K. Aramaki, T. Fujii, and T. Ura, “A Hybrid Environment for the Development of Underwater Mechatronic Systems,”
Proceedings of the 1995 IEEE IECON, International Conference on Industrial Electronics, Control, and Instrumentation, 6-10
Nov. 1995, Orlando, FL, USA, Vol. 1, pp. 173-178, 1995.
[28] N. J. Pioch, B. Roberts, and D. Zeltzer, “A Virtual Environment for Learning to Pilot Remotely Operated Vechicles,” Proceedings of
the VSMM ’97, International Conference on Virtual System and Multimedia, 10-12 Sept.
1997, Geneva, Switzerland, pp. 218-226, 1997. [29] X. Wang, G. Seet, M. Lau, E. Low, and K. C. Tan, “Exploiting Force Feedback in Pilot Training and Control of an Underwater Robotics Vehicle: an Implementation in LabVIEW,” OCEANS 2000 MTS/IEEE Conference and Exhibition, 11-14 Sept. 2000,
Providence, RI, USA, Vol. 3, pp. 2037-2042, 2000.
[30] Newman, J. N., Marine hydrodynamics, 4th ed., MIT Press, Cambridge, MA, 1984.
[31] F. R. Driscoll, R. G. Lueck, and M. Nahon, “Development and validation of a lumped-mass dynamics model of a deep-sea ROV system,”
Applied Ocean Research Vol. 22, pp. 169-182,
2000.
[32] T. I. Fossen, Guidance and Control of Ocean
Vehicles, John Wiley & Sons, Chichester, 1994.
[33] P. Jiménez, F. Thomas, and C. Torras, “3D collision detection: a survey,” Computers &
Graphics, Vol. 25, No. 2, pp. 269-285, 2001.
[34] K. Vickery, “Acoustic Positioning Systems: A practical Overview of Current Systems,”
Proceedings of the Workshop on Autonomous Underwater Vehicles, 1998, 20-21 Aug.,
Cambridge, MA, USA, pp. 5-17, 1998.
誌謝
本研究承行政院國家科學委員會之經費贊 助(NSC91-2611-E-110-007、NSC92-2611- E-110-003、NSC93-2611-E-110-002)得以順 利進行,僅此致謝。