國 立 交 通 大 學
電信工程研究所
博 士 論 文
一位元高精確度之載波相位估計及高運算
效率之碼相位擷取
One-bit High-Accuracy Carrier Phase
Estimation and Computationally-Efficient
Code Phase Acquisition
研 究 生:謝 萬 信
指導教授:高 銘 盛
一位元高精確度之載波相位估計及高運算效
率之碼相位擷取
研 究 生: 謝萬信 指導教授: 高銘盛 博士
國立交通大學 電機資訊學院
電信工程研究所
摘要 本論文首先探討高精確度之一位元載波相位估計,我們根據訊雜比(signal-to-noise ratio, SNR)選擇合適的相位鑑別器,以達到高精確度的相位檢測。在低及高訊雜比的 環境中,反正切函數相位鑑別器(arctangent phase discriminator)以及雜訊補償數位相位鑑別器(noise-balanced digital phase discriminator)分別可以精確地估測載波相位,但對
於中等訊雜比的應用,兩者皆有估計偏移(bias)的問題。因此,本論文提出訊雜比輔
助相位鑑別器(SNR-aided phase discriminator),以解決中等訊雜比的相位檢測問題。
然而,許多實際的應用無法提供訊雜比的資訊,因此我們進一步將訊雜比輔助相位鑑
別器發展成同時估測相位及訊雜比的演算法。另一方面,本論文提出一個高運算效率
的碼相位(code phase)擷取方法,稱為相位同步擷取法(phase coherence acquisition,
PCA)。我們利用複數相量(complex phasor)擷取虛擬隨機序列(PN sequence)的碼相 位,其中輸入及本地序列會先分群,接著將分群序列映射到複數相量以提升抗雜訊能
力。由於相位同步擷取法主要利用複數相量之間的相位差,所以不需要複數乘法的運
算,因此相位同步擷取法所需的運算量遠低於習知的快速傅立葉轉換方法。最後,本
One-bit High-Accuracy Carrier Phase
Estimation and Computationally-Efficient Code
Phase Acquisition
Student: Wan-Hsin Hsieh Advisor: Dr. Ming-Seng Kao
Institute of Communication Engineering
College of Electrical and Computer Engineering
National Chiao Tung University
ABSTRACT
In the dissertation, we first investigate the high-accuracy one-bit carrier phase
estimation. Signal-to-noise ratio (SNR) is utilized to select the proper phase discriminator
to achieve high accuracy. The traditional arctangent phase discriminator (APD) and the
noise-balanced digital phase discriminator (NB-DPD) can obtain accurate carrier phase for
low and high SNR, respectively, but both algorithms have estimation bias in moderate
SNR. Therefore, the SNR-aided phase discriminator (SNRaPD) is proposed to obtain the
accurate phase. Since the SNR information may be unavailable in many applications, we
further extend the algorithm of SNRaPD to jointly estimate the phase and SNR. On the
other hand, we propose a computationally efficient method, termed Phase Coherence
Acquisition (PCA), for PN sequence acquisition by using complex phasors. In order to
combat noise, the input and local sequences are partitioned and mapped into complex
phasors in PCA. The phase differences between pairs of phasors are then utilized for code
phase acquisition, and thus complex multiplications are avoided. The computation load of
Acknowledgements
I wish to express my deepest gratitude to my advisor, Professor Ming-Seng Kao, for his kind guidance and assistance during my pursuit of my PhD degree. In addition to the inspiration for the subject matter and enthusiasm related to academic research, he also taught me a lot about life so that I will have an optimistic attitude toward every type of difficulty. It has been a great honor for me to work under his supervision. I am also deeply grateful to Dr. Chieh-Fu Chang, for his guidance on the presentation and publication of research results. His critical advices made the results more solid and convincing. He is also a great tutor who has guided me in the spirit of academic research. Without the invaluable support from Prof. Ming-Seng Kao and Dr. Chieh-Fu Chang, this work could not have been done.
Special thanks go to my laboratory colleagues and friends, Dr. Shu-Tsung Kuo, Dr. Fan-Shuo Tseng, Mr. Ching-Hui Lin (pylon), Mr. Hao-Tang Shih (archer), Mr. Chia-Feng Chang (dream), Mr. Shih-Wei Yeh (malaymo) and Mr. Wei-Chiang Chen for their encouragement and friendship during my study at NCTU. I would also like to thank all the friends in the NCTU Aboriginal club. They introduced me to a vivid and delightful life at NCTU.
I also thank Dr. Men-Tzung Lo for the opportunity to participate in his research projects. I learned a lot about biomedical signal processing under his guidance, for which also broadened my horizons on “signal processing”.
Finally, I greatly appreciate the encouragement and love of my parents, my parents-in-law and my wife, Waan-Rur Lu. Their warm consideration and understanding have accompanied me through this long journey.
Contents
Chinese Abstract
... IEnglish Abstract
... IIAcknowledgement
... IIIContents
... IVList of Figures
... VIList of Tables
... VIIList of Acronyms
... VIIChapter 1
Introduction
1.1 Review of Phase Estimation Method ... 1
1.2 Review of Code Phase Acquisition Method ... 2
1.3 Organization of Dissertation ... 4
Chapter 2
One-Bit Accurate Phase Estimation
2.1 System Model ... 52.2 Accurate One-Bit Phase Discriminator ... 11
2.2.1 High-SNR ... 12
2.2.2 Low-SNR ... 13
2.2.3 Moderate-SNR ... 18
2.3 SNR-Aided Phase Discriminator ... 20
2.3.1 Proposed method ... 20 2.3.2 Cramér-Rao bound ... 23 2.3.3 Stop criterion ... 25 2.3.4 Range of application ... 27 2.4 Summary ... 30
Chapter 3
3.1 System Model ... 31
3.2 Nonlinear Least-Square Algorithm ... 34
3.3 Simulation and Discussion ... 36
3.3.1 Monte Carlo simulation ... 36
3.3.2 Range of application ... 40
3.4 Summary ... 42
Chapter 4
Code Phase Coherence Acquisition Method
4.1 Motivation ... 434.2 Acquisition by Phasor ... 44
4.3 Phase Coherence Acquisition Algorithm ... 47
4.3.1 Segmentation ... 47
4.3.2 Acquisition by Phase ... 49
4.3.3 Multi-layer PCA ... 52
4.3.4 Error detection capability ... 55
4.4 Performance of PCA ... 57
4.5 Computation of PCA ... 66
4.6 Summary ... 67
Chapter 5
Conclusions and Future Work
...69Reference
...71Appendix
A. Derivation of mean and variance of I-Q channel outputs ... 75B. Power series representation of mean and variance of I-Q channel outputs .. 76
List of Figures
Fig. 2.1 System structure of one-bit SDR...6
Fig. 2.2 Relationship between the mean values of the I-Q channel outputs (first quadrant)...11
Fig. 2.3 Simulated results of NB-DPD regarding SNR...13
Fig. 2.4 Geometric representation of performance of APD on the I-Q plane...14
Fig. 2.5 Analytical and simulated results of APD regarding SNR...17
Fig. 2.6 Asymptotic performance of NB-DPD and APD regarding SNR...19
Fig. 2.7 Performance of SNRaPD regarding SNR...22
Fig. 2.8 MSE of SNRaPD (markers) and AvCRB (solid lines)...24
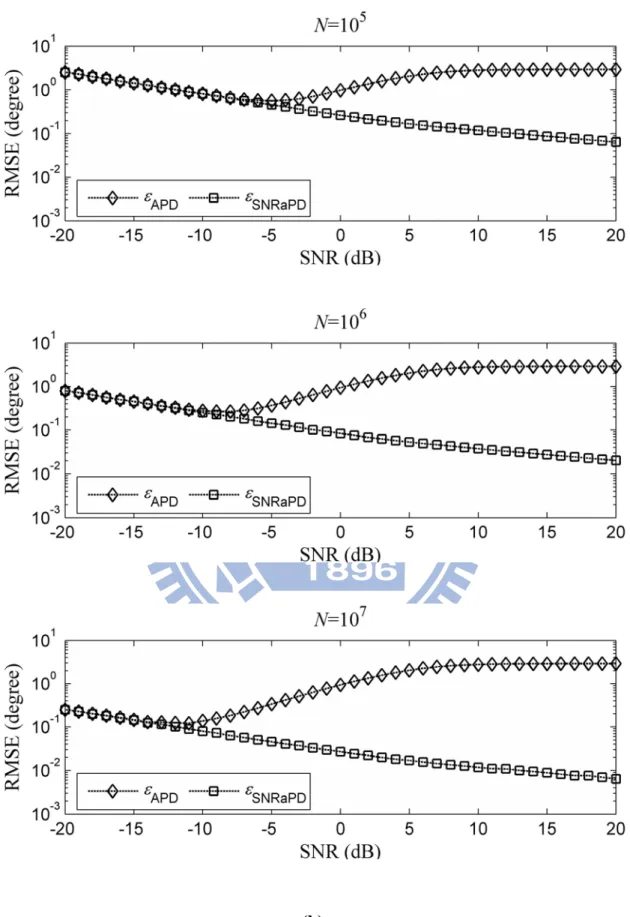
Fig. 2.9 Comparison between RMSE of SNRaPD and that of NB-DPD and APD...28
Fig. 3.1 RMSE of phase estimation...38
Fig. 3.2 Normalized RMSE of SNR estimation...38
Fig. 3.3 Mean I-Q correlation outputs for SNR between 0 to 15dB in 1dB step...39
Fig. 4.1 Schematic plot of the phase resolution for phasors on the complex domain...46
Fig. 4.2 Schematic plot of two layer segmentation: (a) segmentation in the 1st-layer; (b) segmentation of segment A in the 20 nd -layer...54
Fig. 4.3 Flow chart of the process of two-layer PCA...56
Fig. 4.4 Correct probability of d1 in the 1 st -layer of PCA...60
Fig. 4.5 Joint correct probability of d1 and c1 in the 1 st -layer of PCA...61
Fig. 4.6 STD of cˆ1 in the 1 st -layer of PCA when dˆ1d1...62
Fig. 4.7 Correct probability of d2 in the 2 nd -layer of PCA...65
Fig. 4.8 Joint correct probability of d2 and c2 in the 2 nd -layer of PCA...65
List of Tables
Table 4.1 Computations of the two-layer PCA and the FFT-based method...67
List of Acronyms
ADC analog-to-digital conversion
AGC automatic gain control
APD arctangent phase discriminator
AWGN additive white Gaussian noise
C/A coarse/acquisition
CRB Cramér-Rao bound
DPD digital phase discriminator
DSP digital signal processing
FFT fast Fourier transform
GNSS global navigation satellite system
I-Q inphase-quadrature
LEO low Earth orbit satellite
LLN law of large numbers
MLE maximum-likelihood estimation
MSE mean-squared error
NB-DPD noise-balanced digital phase discriminator
PCA phase coherence acquisition
PN pseudo-random
POD precise orbit determination
RMSE root mean-squared error
SDR software-defined receiver
SNR signal-to-noise power ratio
SNRaPD SNR-aided phase discriminator
STD standard deviation
TEC total electron content
Chapter 1
Introduction
Carrier phase estimation and code phase acquisition are essential in various applications,
such as the spread-spectrum system and the global navigation satellite system (GNSS) [1-2].
In modern applications, carrier phase estimation and code phase acquisition may be
implemented by means of the software-defined receiver (SDR) so as to obtain more
capability and flexibility in signal processing [3]. In SDR, more analog-to-digital conversion
(ADC) bits are generally desired so as to avoid significant quantization error. For example,
power degradation is at least 2dB for one-bit ADC [4-5]. On the other hand, because of the
benefits of the one-bit scenario, such as efficient bitwise processing and the avoidance of
automatic gain control (AGC), the one-bit ADC has still induced wide interest [6-11]. In this
dissertation, we investigate the high-accuracy one-bit carrier phase estimation for the tracking
process and propose a multiplication-free code phase acquisition method that uses much less
computation than the FFT-based method for SDR.
1.1 Review of Phase Estimation Method
For the conventional phase estimation of a sinusoidal carrier, the arctangent phase
discriminator (APD) is widely adopted since it achieves maximum-likelihood estimation
(MLE) in additive white Gaussian noise (AWGN) [12, page 167]. With infinite ADC bits, the
APD attains MLE irrespective of what the signal-to-noise ratio (SNR) is. However, this is not the case for realistic phase discriminators that have finite precision using a few-bit ADC,
especially those with one-bit ADC. The problem of parameter estimation for a single sinusoid
was previously investigated in [13-16]. In [16], Cramér-Rao bound (CRB) of one-bit
samples. The effects of one-bit sampling and quantization were also discussed. Unfortunately,
due to the lack of a closed form of probability mass function of samples [16, Eq. (10)], the
derivation of MLE of the sinusoidal carrier is intractable. Next, the dithering techniques were
used to improve the estimation performance. In [17] and [18], the asymptotic bias of one-bit
quantized mean estimation problems was addressed. Other relevant studies fell in the field of
the limiter phase detector [19][20, Chap. 10], which utilizes a limiter to prevent overload of
the received signal. For high SNR, the asymptotic phase estimation bias of APD had been
mentioned and an improved phase discriminator, called digital phase discriminator (DPD),
was proposed in [21]. The DPD achieves much higher asymptotic accuracy than that of the
traditional APD. However, the DPD does not perform well in low SNR environments due to
its sensitivity to noise. A modified DPD, termed the noise-balanced digital phase
discriminator (NB-DPD), incorporates the summation of noisy samples in phase estimation
leading to an improved noise performance [22].
1.2 Review of Code Phase Acquisition Method
Pseudo-random (PN) sequence acquisition is widely used in various applications. For
example, the acquisition is implemented to search for the correct code phase so as to identify
the transmitter in spread spectrum communications. Because of the limitations associated
with the hardware techniques, conventional code acquisition could only be achieved by
serially examining the possible code phase of the input sequence in the time-domain [23-24].
However, the time required for acquisition would be so long that limits the application of
longer PN sequence in practice. With the improvements in hardware implementation, the
parallel acquisition scheme, which employs a large amount of correlation circuits to examine
all the code phases concurrently was then devised to significantly reduce the acquisition time
[25]. A hybrid scheme had also been proposed to provide a compromise between the
[26]. In addition to the hybrid scheme, the acquisition schemes can employ auxiliary
subsystems, such as an auxiliary signal generator and a phase estimator, to attain reasonable
speed and complexity as well [27-28]. Owing to the recent development of digital signal
processing (DSP) for software receivers, the exhaustive computation of the direct serial
search between two sequences can be mitigated by fast Fourier transform (FFT) to reduce the
computation by utilizing convolution theorem [29-31], which states that the convolution of
two sequences can be derived from the pointwise product of corresponding Fourier
transforms (i. e., [ ]x n y n[ ]F X( ) Y( ) , where denotes convolution and F represents Fourier transform). The theorem that facilitates FFT can be used in the PN
sequence acquisition to efficiently search the code phase [32-33]. To further reduce the
computational burden of FFT-based acquisition, the efficient split-radix FFT techniques
rather than conventional radix-2 FFT could be used for transformation so that the number of
multiplications, addition and memory access can thus be reduced [34]. In addition, by the fact
that the more FFT points, the more computations are required, the acquisition with fewer FFT
points, which is cheaper, was performed on the coarse/acquisition (C/A) codes with
averaging up several samples of a code chip [35]. Instead of averaging the samples, the FFT
points could also be reduced by removing the insignificant points. By examining the
spectrum of input and local C/A sequences, it is found that most of the energy is contained in
the low-frequency half of the spectrum. Hence the other half of the spectrum, which is
comprised of very little information could be eliminated and thus the number points for
FFT-based acquisition were decreased [36]. On the other hand, the multiplication operation in
the FFT method generally requires many computational resources. Hence, a substitute
method employing Walsh transform (WT) was implemented to calculate the convolution
without the need for multiplications [37-38]. Specifically, as compared to the FFT-based
method, the WT-based method requires fewer additions and no multiplications, but additional
1.3 Organization of Dissertation
The dissertation is organized as follows. In Chapter 2, we investigate the one-bit
high-accuracy phase discriminator for three SNR ranges: low SNR, high SNR and moderate
SNR. Unlike traditional approaches, this approach first distinguishes which SNR range an
application falls into, and this SNR information is then utilized to select a proper phase
discriminator for achieving high accuracy. For low-SNR applications, traditional APD is
adopted. For high-SNR applications, NB-DPD is utilized to improve accuracy. Between
them, for moderate-SNR applications, a novel SNR-aided phase discriminator (SNRaPD)
developed using the nonlinear least-square method is proposed.
However, since the SNR information may be unavailable in many applications, the SNR
should also be estimated so as to attain the accurate phase estimation. Hence, a nonlinear
least-square algorithm for deriving the SNRaPD is further extended to jointly estimate the
phase and SNR estimation in Chapter 3. Because of the avoidance of AGC by using one-bit
ADC, the joint phase and SNR estimation method can accommodate signals with high
dynamic range. Potential applications for the spaceborne measurements are also discussed.
Next, we propose a novel method, termed the Phase Coherence Acquisition (PCA), to
search for the cross-correlation peak for pseudo-random (PN) sequence acquisition by using
complex phasors in Chapter 4. The PCA requires only complex additions in the order of N,
the length of the sequence, whereas the conventional method utilizing FFT requires complex multiplications and additions, both in the order of Nlog2N . Specifically, the phase
differences between pairs of input and local phasors are utilized for acquisition, and thus
complex multiplications are avoided. The significant reduction of computational loads makes
the PCA an attractive method, especially when the sequence length of N becomes
extremely large which becomes intractable for the FFT-based acquisition. Finally, the
Chapter 2
One-Bit Accurate Phase Estimation
In this chapter, we clarify the accuracy of one-bit phase discriminators regarding SNR,
such as the accuracy of APD and NB-DPD in low and high SNR, respectively. Moreover, we
design an SNRaPD that utilizes the SNR information in phase estimation to enhance ultimate
accuracy in moderate SNR. A high-accuracy phase estimation is critical to the successful
tracking of carrier signals. In this study, the traditional inphase-quadrature (I-Q) structure
using one-bit ADC is studied first and the SNR-dependent mean value of the I-Q channel
output is derived. Note that, because the frequency of the received carrier can be captured by
the acquisition process or a frequency locked loop [2], the frequency shift between input and
local carrier can be regarded as a part of phase shift in steady-state tracking. Hence, the
influence of frequency shift is omitted and the AWGN channel is considered in our analysis.
Next, phase estimation with APD and NB-DPD are addressed. The SNRaPD is then
introduced and the improvement in accuracy is simulated and compared with the average
Cramér-Rao bound (CRB). In addition, an adequate stop criterion and the range of
applications regarding the SNR of SNRaPD are also discussed. The high-accuracy phase
information obtained with the proposed algorithm can potentially be applied to spaceborne
measurements in GNSS and beacon receivers when the ambient SNR falls within the
“moderate SNR” range and the multipath effect is mitigated.
2.1 System Model
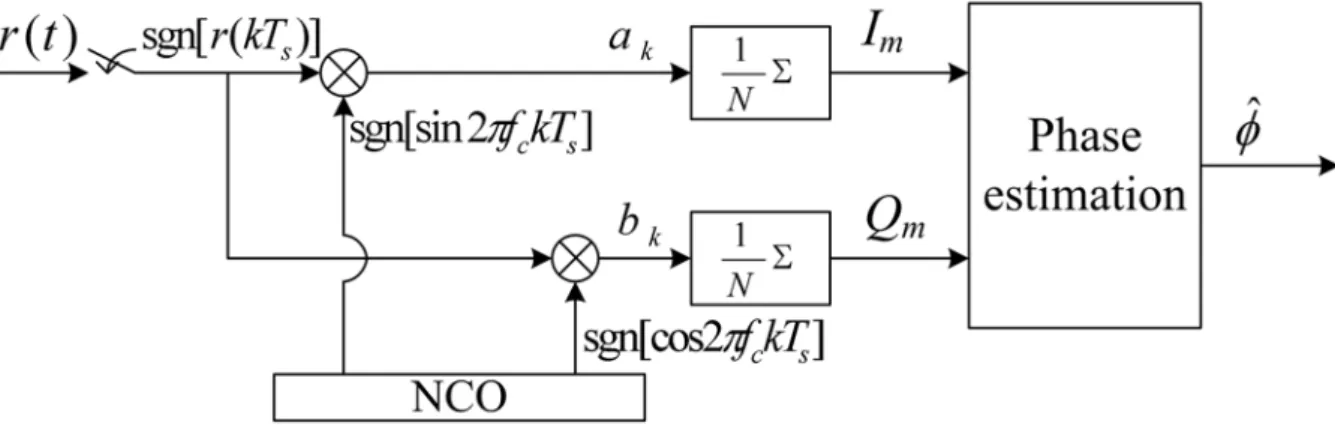
The system model for phase estimation of sinusoidal carrier in the one-bit SDR is shown
Fig. 2.1. System structure of one-bit SDR. ) ( ) 2 sin( ) (t f t t r c (2.1) where f is the carrier frequency, c is an unknown phase, and (t) is the AWGN.
For phase estimation, the output frequency of the numerically controlled oscillator (NCO) is assumed equal to the incoming carrier frequency. Let T be the sampling period. The s discrete-time one-bit quantized r(t) is given by
)] T ( ) T 2 sgn[sin( )] T ( sgn[ ] [k r k s f k s k s r c (2.2) where . 0 if 1 0 if 1 ] sgn[ x x x
In addition, let the sampling frequency be fs 1/Ts. We denote
p q h f f s c (2.3)
where h is the greatest integer less than or equal to f /c fs, and p and q are mutually
The mixer output of the inphase channel is given by s s sgn[ ( T )] sgn[sin 2 T ] sgn[sin( ) ] sgn[sin ] k c k k k a r k f k (2.4)
where k 2fckTs and k (kTs) is a zero-mean Gaussian random variable with variance 2.
Consider p samples at tkTs, k0,1,2,,p1. The normalized I-Q channel outputs are denoted by
1 0 ] sgn[sin ] ) sgn[sin( 1 p k k k k p p I (2.5a)
1 0 ] sgn[cos ] ) sgn[sin( 1 p k k k k p p Q . (2.5b)It can be proved that the samples of phases {0,1,,p1} are uniformly distributed over )
2 , 0
[ with a separation of 2/p between neighboring ’s [21]. Note that when we i mention that p is “sufficiently” large later, it means that 2 /p is significantly smaller than the accuracy required for the estimation. According to Appendix A, the mean values and
variances of the I-Q channel outputs are given by
[0, ) [ ,2 ) ) 1 P 2 ( ) P 2 1 ( 1 k k p k k I p (2.6a)
[0, /2) [3 /2,2 ) [ /2,3 /2) ) 1 P 2 ( ) P 2 1 ( 1 k k p k k Q p (2.6b)
1 0 2 2 2 2 4 p P P k k k Q I p p p (2.7) where ) sin( Q P k k dz z x x exp 2 2 1 ) ( Q
2 .Note that the range of summation is defined according to the value of in Eq. (2.6), and k
k
P is a function of . In Eq. (2.7), the variance of the one-bit quantized I-Q outputs k consists of the effect of channel noise and quantization noise. Since {0,1,,p1} are uniformly distributed over [0,2), the mean value of I-channel output in Eq. (2.6a) can be further derived by . ) sin( Q 2 ) sin( Q 2 1 2 ) sin( Q 2 ) sin( Q 2 2 1 ) , 0 [ ) 2 , [ ) 2 , [ ) , 0 [
k k k k p k k k k I p p p p (2.8)From Eq. (2.1), the SNR of the sinusoidal signal is given by
2 2 1 SNR . (2.9)
[ ,2 ) [0, ) ) ) sin( ( Q 2 ) ) sin( ( Q 2 1 k k p k k I p (2.10) where 2SNR .Suppose we choose fs such that p is sufficiently large in Eq. (2.3). According to
Appendix B, the mean value of I-channel output of Eq. (2.10) can be represented as a power
series, which is given by
0 3 0 1 2 2 1 2 ) 2 1 2 cos( 1 2 ) 1 ( ) 1 2 ( 2 ! m m l l m m I m l l m l m m m A p (2.11) where 3/2 2 4 A .Similarly, the mean value of Q-channel output of Eq. (2.6b) is denoted by
[0, /2) [3 /2,2 ) [ /2,3 /2) )) sin( ( Q 2 )) sin( ( Q 2 1 k k p k k Q p . (2.12)By a similar derivation of Eq. (2.11), the power series representation of Q is given by
0 3 0 1 2 2 1 2 ) 2 1 2 sin( 1 2 ) 1 2 ( 2 ! ) 1 ( m m l m m m Q l m l m l m m m A p . (2.13)In addition, according to Appendix B, the power series of the variances of the I-Q channel
. ) 1 2 )( 1 2 ( 2 ! ! ) 1 ( 1 2 2 2 2 )) 1 2 ( 2 ! ( 1 2 2 4 2 1 0 1 3( ) 2 2 ) ( 2 0 3 1 2 2 4 2 2
x y x x y y x y x m m m Q I y x y x y x y x m m m m p p p p (2.14)The above results are obtained for p samples. When the mean values and variances are generalized to N mp samples, where m is an integer, the normalized I-Q channel outputs are given by
k k k k m NI 1 sgn[sin( ) ] sgn[sin ] (2.15a)
k k k k
m N
Q 1 sgn[sin( ) ] sgn[cos ]. (2.15b)
The mean values of the I-Q channel outputs are the same as Eq. (2.11) and Eq. (2.13),
respectively. The variance can be expressed as
. ) 1 2 )( 1 2 ( 2 ! ! ) 1 ( 1 2 2 2 2 )) 1 2 ( 2 ! ( 1 2 2 4 2 1 0 1 3( ) 2 2 ) ( 2 0 3 1 2 2 4 2 2
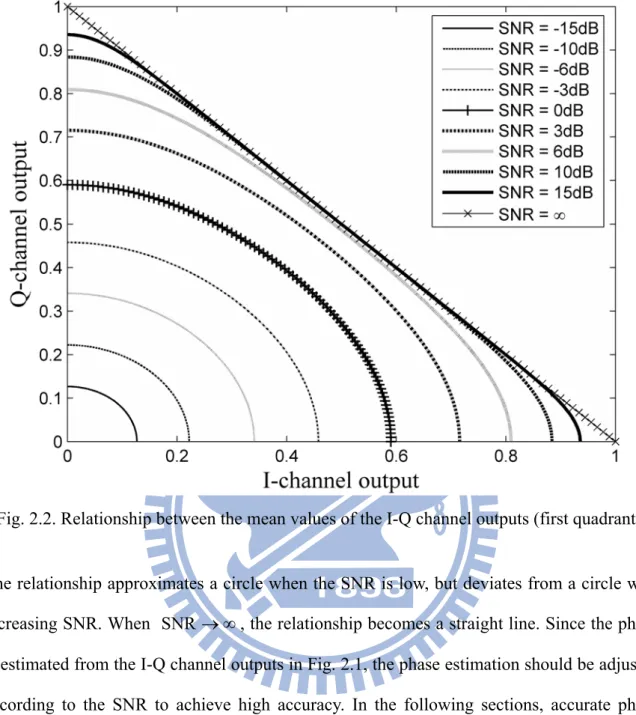
x y x x y y x y x m m m Q I y x y x y x y x m m m m N N (2.16)The relationship between the mean values of the I-Q channel outputs is shown in Fig. 2.2.
Here, only the relationship in the 1st quadrant is illustrated because of the symmetry of the
trigonometric function. As can be seen in Fig. 2.2, the relationship between the I-Q channel
Fig. 2.2. Relationship between the mean values of the I-Q channel outputs (first quadrant).
The relationship approximates a circle when the SNR is low, but deviates from a circle with
increasing SNR. When SNR , the relationship becomes a straight line. Since the phase is estimated from the I-Q channel outputs in Fig. 2.1, the phase estimation should be adjusted
according to the SNR to achieve high accuracy. In the following sections, accurate phase
estimations regarding SNR are introduced. Note that, in order to evaluate the achievable
phase accuracy, the assumption of zero frequency offset is inherently applied to the following
analyses and simulations.
2.2 Accurate One-Bit Phase Discriminator
In this section, we introduce phase discriminators that have been proposed in the
literature, i.e., DPD [21], NB-DPD [22], and APD, for one-bit quantized data and discuss
2.2.1 High-SNR
When SNR, k in Eq. (2.15) can be neglected. Moreover, when the number of samples N is large, by the law of large numbers (LLN), the I-Q channel outputs, denoted as
(Im,Qm), approximate their mean values, i.e., Im I and QmQ . The relationship between the I-Q channel outputs is then denoted by
1 Q
I
. (2.17)
The relationship is a straight line as shown in Fig. 2.2. In this situation, the phase can be
estimated by DPD, resulting in higher accuracy than that of APD [21]. Applying the system model of Fig. 2.1 in [21], the phase estimation according to (Im,Qm) is given by
) 1 ( 2 ) sgn( ˆ DPD Qm Im . (2.18)
The mean-squared error (MSE) of DPD will be negligible with a sufficiently large N.
However, in the high SNR environment, small noise variance still exists in the I-Q
channel outputs, and the relationship between the mean I-Q outputs deviates from a straight
line as shown in Fig. 2.2. Since DPD is sensitive to noise, the modified DPD, called
NB-DPD, is provided to improve phase estimation in this situation. The phase estimated by
NB-DPD is given by [22] | | | | 1 2 ) sgn( ˆ DPD NB m m m m Q I I Q . (2.19)
] ) ˆ [( E 2 DBD NB DPD NB
. Using Monte Carlo simulation methods for 100 trials,
DPD NB
regarding SNR is shown in Fig. 2.3. As expected, NBDPD decreases with increasing SNR. In addition, it decreases slightly with N in high SNR. Apparently, the
NB-DPD can achieve high phase estimation accuracy in high SNR.
2.2.2 Low-SNR
When the SNR is low, we have 1 in Eq. (2.11) and Eq. (2.13). Thus, the mean values of the I-Q channel outputs are approximated by
cos 2 4 2 / 3 I , (2.20a) sin 2 4 2 / 3 Q . (2.20b)
This proves the circular relationship of the I-Q channel output in the low SNR environment
as shown in Fig. 2.2. The result is also consistent with Pouzet’s conclusion, when we consider
a limiter as a binary quantizer with an infinite number of samples [19][20, Chap. 10]. Since
the mean I-Q channel outputs have an approximately circular relationship, APD is a good
choice in low SNR. In addition, the variances of the I-Q channel outputs of Eq. (2.16) are
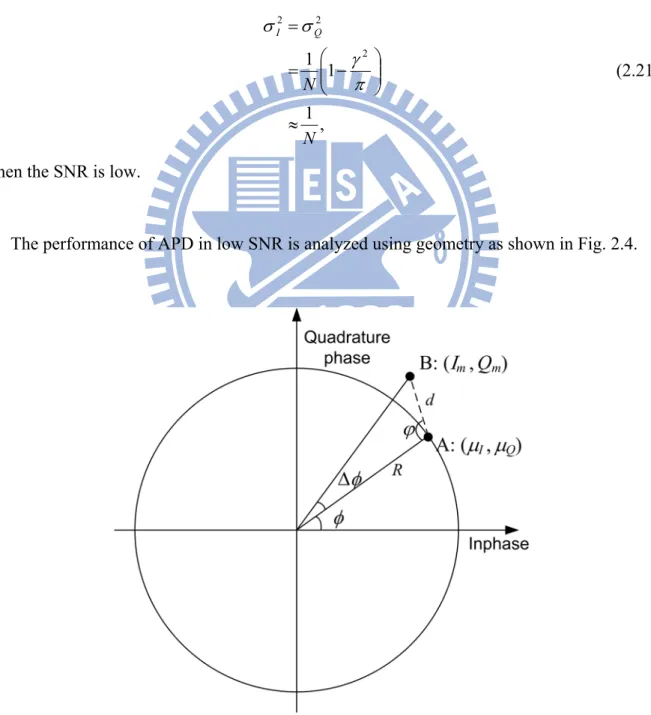
approximated by , 1 1 1 2 2 2 N N Q I (2.21)
when the SNR is low.
The performance of APD in low SNR is analyzed using geometry as shown in Fig. 2.4.
First, let point A:(I,Q) denote the mean values of the I-Q outputs on a circle with radius
R and polar phase . According to Eq. (2.20), the radius R is given by
. SNR 4 2 4 2 / 3 2 / 3 2 2 I Q R (2.22)
Next, let B:(Im,Qm) be the measured I-Q channel outputs. The distance between A and B is denoted by 2 2 ( ) ) (Im I Qm Q d . (2.23)
The sinusoidal carrier phase estimated from (Im,Qm) with APD is given by
m m I Q atan2 ˆ APD (2.24)
where )atan2(x denotes the arctangent-2 function and is the phase estimation error.
Without loss of generality, let 0. From the law of sines, we have
) sin( sin R d . (2.25)
Assume 1 . Then sin , and sin()sin() . Eq. (2.25) is approximated by
) sin( R d . (2.26)
Suppose is uniformly distributed over [0,). For a fixed d, the expected value of 2
with respect to is denoted by
. 2 ) ( sin 1 ] [ E 2 2 2 0 2 2 2 R d d R d
(2.27)Assume d and are mutually independent. According to the definition of variance and Eq. (2.21), the expected value of d is given by 2
. 2 ] ) ( ) [( E ] [ E 2 2 2 2 2 N Q I d Q I Q m I m d (2.28)
From Eq. (2.27) and Eq. (2.28), the MSE of phase estimation is denoted by
. SNR 16 1 2 ] [ E ]] [ E [ E 3 2 2 2 2 N NR R d d d (2.29)
) degree ( . SNR 80 ) radian ( SNR 4 ]] [ E [ E 2 / 3 2 APD N N d (2.30)
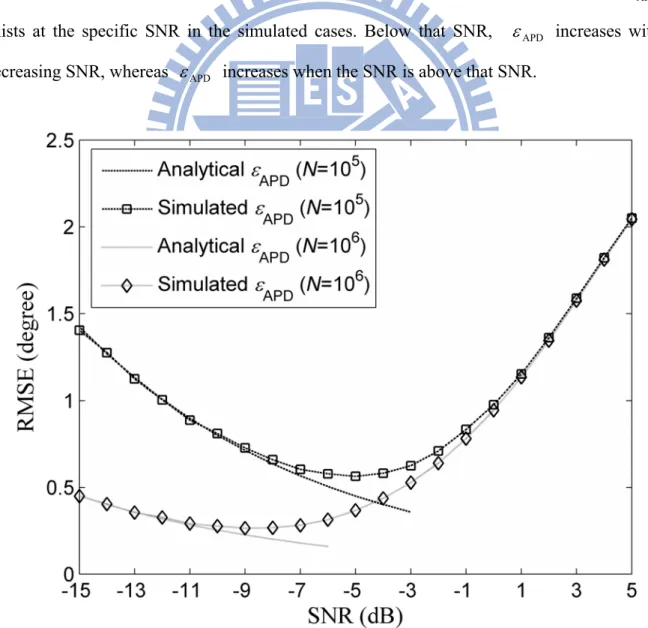
From Eq. (2.30), APD is inversely proportional to the square root of the product of SNR and N. The analytical and simulated APD are shown in Fig. 2.5. The simulated results are obtained by Monte Carlo simulation for 100 trials. From Fig. 2.5, the simulated results approach the analytical values in low SNR. Note that the analytical APD is provided in part since the result is valid only when low SNR is assumed. From Fig. 2.5, a minimal APD exists at the specific SNR in the simulated cases. Below that SNR, APD increases with decreasing SNR, whereas APD increases when the SNR is above that SNR.
According to Fig. 2.2, since the relationship of the mean values of the I-Q outputs deviates from a circle with increasing SNR, the increase in APD is due to the estimation bias of the APD, which will be shown below.
2.2.3 Moderate-SNR
Between the high SNR and the low SNR, the relationship between the mean I-Q outputs
is complicated, as indicated in Fig. 2.2. The estimation bias of NB-DPD and APD is
examined by means of the asymptotic performance. Suppose N is sufficiently large. By LLN, the I-Q channel outputs of Eq. (2.15) approach their mean values, i.e., Im I and
Q m
Q . The asymptotic performance of NB-DPD and APD are defined by
| | | | 1 2 ) sgn( ˆ DPD -AsNB Q I I Q , (2.31) I Q ˆAsAPD atan2 . (2.32)
The corresponding squared phase errors are given by 2 DPD -AsNB ND (ˆ ) e and 2 AsAPD A (ˆ )
e , respectively. We further denote the asymptotic estimation error by
2 / 1 ND DPD -AsNB (e ) (2.33) and 2 / 1 A AsAPD (e ) . (2.34)
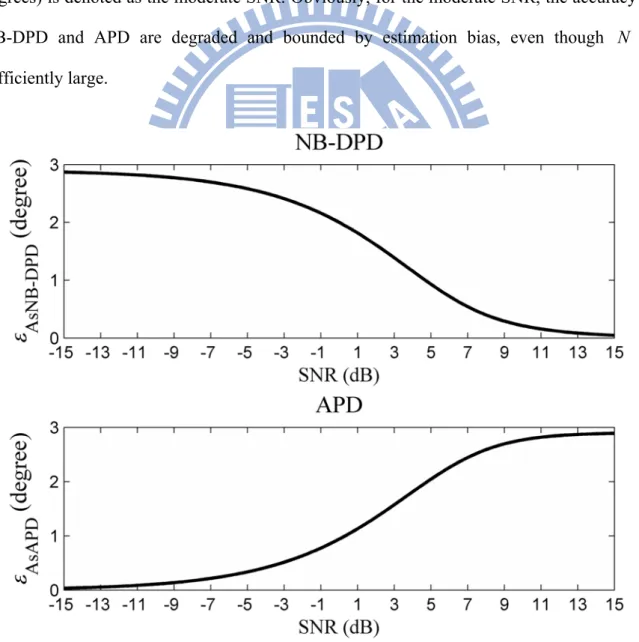
Note that the averaged values of e and ND eA, i.e., e and ND eA, are used in Eq. (2.33) and Eq. (2.34), since they are functions of . The AsNB-DPD and AsAPD regarding SNR are shown in Fig. 2.6. From Fig. 2.6, AsNB-DPD and AsAPD are small in high and low SNR, respectively. That is, AsNB-DPD 0.1degrees if SNR12dB , and AsAPD 0.1degrees when SNR-10dB. However, AsNB-DPD becomes significant when the SNR decreases whereas AsAPD becomes significant when the SNR increases. Here, the range of SNR in which both AsNB-DPD and AsAPD are not negligible is considered “moderate” SNR. For example, SNR between -10 dB and 12 dB in this case (phase accuracy requirement < 0.1
degrees) is denoted as the moderate SNR. Obviously, for the moderate SNR, the accuracy of
NB-DPD and APD are degraded and bounded by estimation bias, even though N is
sufficiently large.
Note that, even though the estimation error due to noise variance decreases with the square
root of the SNR in APD, as indicated in Eq. (2.30), the accuracy of APD is degraded because
of the estimation bias in moderate SNR. This result explains the degradation of APD in moderate SNR as shown in Fig. 2.5. Above all, although NB-DPD and APD perform well in
high and low SNR, respectively, their performance is degraded by the estimation bias in
moderate SNR. Focusing on the moderate SNR, we develop an approach for reducing the
estimation bias and thus improving the accuracy in the following section.
2.3 SNR-Aided Phase Discriminator
2.3.1 Proposed method
Since the mean I-Q outputs vary with the SNR as shown in Fig. 2.2, the SNR should be
taken into consideration in achieving high-accuracy phase estimation. Therefore, the
SNRaPD is developed to improve the accuracy by using the SNR information. Let (I,Q) be the mean values of the I-Q output and (Im,Qm) be the measured I-Q channel output. In SNRaPD, we define a measure by
2 2 2 2 1 2 ( ) ( ) ( ) ( ( )) ( ( )) m I m Q L I Q (2.35) where 1()Im I, 2()Qm Q, and is the unknown phase to be estimated. In
addition, let T 2 1( ), ( )] [ ) (
Λ , where ‘T’ denotes transpose and L()Λ()TΛ().
When the SNR information is given, is known, and the relationship of (I,Q) with respect to phase angle can be uniquely determined. When (Im,Qm) are given, suppose the most likely phase is what minimizes L() as follows:
)} ( min{ arg ˆ SNRaPD L . (2.36)
This is the main idea of SNRaPD.
In optimization theory, the foregoing descriptions are known as the nonlinear
least-square problem. Newton’s method can be used to search ˆargmin{L()} [40]. The vector of the first derivatives of 1() and 2() is given by
T 2 1( ) ( ) ) ( d d d d J . (2.37) In addition, let ) ( ) ( ) ( ) ( ) ( 1 h1 2 h2 H (2.38) where 2 1 2 1 ) ( ) ( d d h 2 2 2 2 ) ( ) ( d d h .
Then using Newton’s method, is updated iteratively by
) ( ) ( )) ( ) ( ) ( ( T 1 1 1 1 1 T 1 1 i i i i i i i H J J J Λ (2.39) where the i denotes the phase obtained after the i-th iteration.
In SNRaPD, depending on the available SNR information, the initial phase 0 can be estimated by NB-DPD or APD, and accuracy can then be improved iteratively by Eq. (2.39). The iteration will stop when |ii1| , where is a small number. In the one-bit SDR
shown in Fig. 2.1, let the carrier frequency fc 15.421111MHz, the sampling frequency MHz 096 . 4 s
f , and N 105. In this case, according to Eq. (2.3), we have p4096000
and 2/p will be significantly smaller than the estimation accuracy described below. The performance of SNRaPD is evaluated by Monte Carlo simulation. In the simulation, the stop
criterion is 103 degrees, and the estimated phase is given by
i
ˆSNRaPD . The RMSE defined by E[(ˆ )2]
SNRaPD SNRaPD
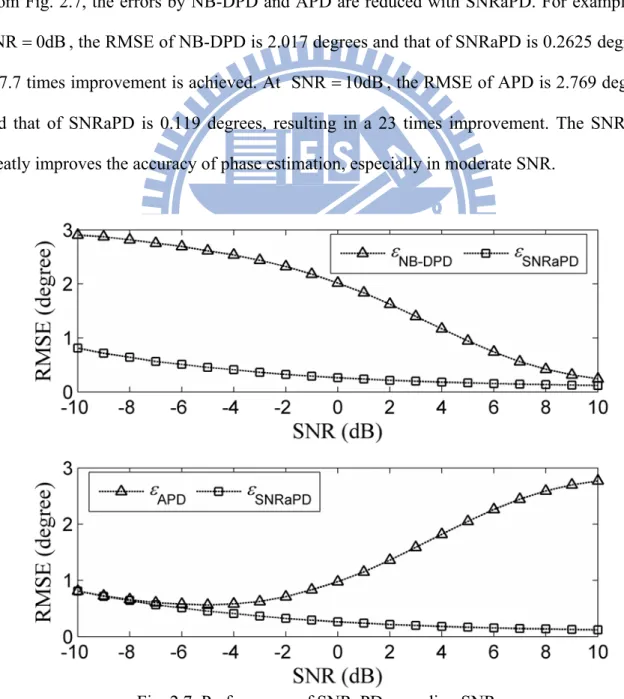
is the average of 100 trials as shown in Fig. 2.7. From Fig. 2.7, the errors by NB-DPD and APD are reduced with SNRaPD. For example, at
dB 0
SNR , the RMSE of NB-DPD is 2.017 degrees and that of SNRaPD is 0.2625 degrees. A 7.7 times improvement is achieved. At SNR 10dB, the RMSE of APD is 2.769 degrees and that of SNRaPD is 0.119 degrees, resulting in a 23 times improvement. The SNRaPD
greatly improves the accuracy of phase estimation, especially in moderate SNR.
Regarding the number of iterations of Newton’s method in SNRaPD, normally less than four
iterations are required based on our simulation results. In addition, as mentioned in Section
2.2, NB-DPD and APD perform well in high and low SNR, respectively. Hence, fewer
iterations are required in SNRaPD when the initial phase is estimated by NB-DPD in high
SNR and by APD in low SNR.
2.3.2 Cramér-Rao bound
The CRB for one-bit quantized complex-valued signals was derived in [16]. The
performance of SNRaPD is compared with the CRB of the estimated phase. For simplicity, only the real-value case is considered. The probability mass function of r[k] in Eq. (2.2) is given by 2 2 0 ( ; ) Prob( [ ] 0; ) ( sin( )) 1 exp . 2 2 r k f q q r k r q dr
(2.40)The Fisher information is then obtained by
1 0 1 1 2 0 1 I( ) ( ; ) ( ; ) ( ; ) 1 ( ; 1/ ) 2 N T r r k q r N k k f f q q f q
(2.41) where 2 2 2 2 )) sin( ) 2 / 1 (( erf 1 ) ( sin 1 exp ) ( cos 4 ) / 1 ; ( k k k k dt t x) 2 xexp( ) ( erf 0 2
.To investigate the achievable performance of SNRaPD, we assume that the frequency in Eq. (2.41) is zero, i.e. k 0, and the phase is a uniform random variable. We define the average Fisher information by averaging Eq. (2.41) over phases, which is denoted by
2 0 2 1 I I( ) 2 ( 1/ ) 2 d N
(2.42) where ( ;1/ )d 2 1 ) / 1 ( 2 0
.Taking the inverse of the average Fisher information, we have the average CRB given by
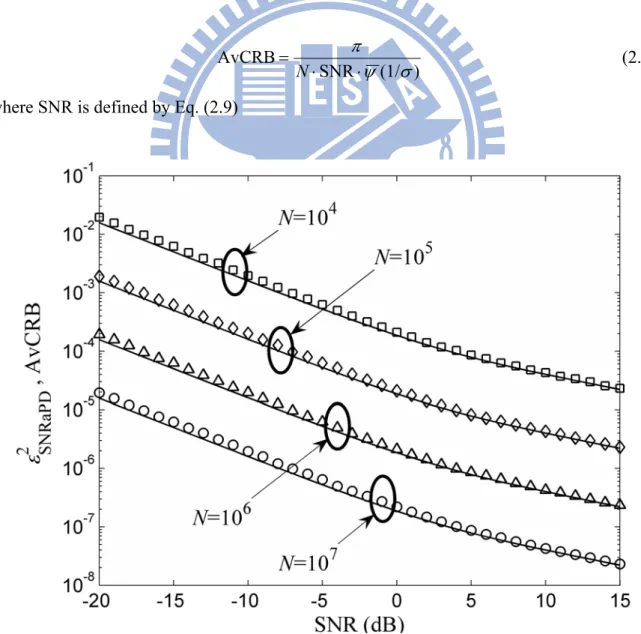
) (1/ SNR AvCRB N (2.43)
where SNR is defined by Eq. (2.9)
The MSE of SNRaPD defined by E[(ˆ )2]
SNRaPD 2
SNRaPD
is compared with the AvCRB in Fig. 2.8. The AvCRB is plotted with solid lines, and the 2
SNRaPD
is denoted by markers. The performance of SNRaPD is obtained from Monte Carlo simulation using 100 trials. In Fig. 2.8, 2
SNRaPD
is close to AvCRB and their difference approaches zero with increasing SNR. Thus the accuracy of SNRaPD is validated. Note that the difference between AvCRB and 2
SNRaPD
is similar for different values of N.
2.3.3 Stop criterion
As mentioned at the end of Section 2.3.1, although estimation bias is reduced by
SNRaPD, and ˆSNRaPD argmin{L()} is achieved by Newton’s method, noise variance still exists in ˆSNRaPD. As a result, the strict criterion 3
1| 10
|i i (degrees) may result in the need for extra iterations, but the performance cannot be improved. From Eq. (2.35), the first derivative of L() is given by ). ( ) ( 2 ) ( ) ( ) ( ) ( 2 ) ( T 2 2 1 1 Λ J d d d d d dL (2.44)
Note that the original criterion 3 1| 10
|i i is consistent with dL(ˆSNRaPD)/d 0, since ˆSNRaPD argmin{L()}. As we consider the noise variance with Eq. (2.44), a new stop criterion is defined for SNRaPD as follows. Let c c in Eq. (2.44), where c is the true phase, and is the phase error due to noise variance. Since the AvCRB of Eq. c (2.43) is the theoretical bound of variance, let c AvCRB. The new stop criterion is defined by | ) ( ) ( 2 | | ) ( ) ( 2 | T T c c c c i i Λ J Λ J . (2.45)
Note that the absolute value is used since the same result but with opposite polarity is
obtained by cc . In addition, the criterion |2 ( )T ( )|
c c c c Λ J is a
function of c, and the minimal value occurs when c k/2. Hence, the criterion is further defined by |2 ( )T ( )| /2 c c c c k c Λ
J to guarantee that the criterion is valid
for all phases.
Example―Determination of the stop criterion: Let SNR6dB, N 105, and 0
c
. According to Eq. (2.43), AvCRB0.12215
c . Applying 0.12215 c c to
Eq. (2.44), we have |2J(0.12215)TΛ(0.12215)|0.001712. Hence, the iteration will stop when 001712|2 ( )T ( )|0.
i i
Λ
J .
A similar RMSE is achieved with the new stop criterion according to the simulation
results, which confirms our supposition. Moreover, the number of iterations is reduced with
the new criterion. Recall that the original criterion is consistent with dL(ˆSNRaPD)/d 0. Since Newton’s method will reach the criterion of ( )/ 2| T( ) ( )|
c c c c d dL J Λ before that of dL(ˆSNRaPD)/d 0, the number of iterations is reduced accordingly.
Finally, most computational loads of SNRaPD fall in computing 1() and 2() as well as their derivatives, which involve and I Q of Eq. (2.11) and Eq. (2.13), respectively. In practice, we use M terms to approximate and I Q rather than infinite sums. Moreover, we can calculate and store coefficients in a table in order to further mitigate
the computational burdens. For applications with SNR less than 0 dB, M 8 is sufficient to well approximate and I with RMSE smaller than Q 106. In addition, less than four
iterations are normally required from our simulation results. Therefore the computational
burden of SNRaPD is feasible, given today’s fast processors.
2.3.4 Range of application
The range of application of SNRaPD is studied by comparing SNRaPD with NBDPD and
APD
. The simulated results regarding SNR and N are illustrated in Fig. 2.9. From Fig. 2.9(a), compared with NB-DPD, the improvement in the accuracy of SNRaPD is significant
in moderate SNR. Note that the range of the moderate SNR may vary according to N and
the required phase accuracy for different applications. Moreover, in N 105 and N 106
cases, the improvement is negligible when the SNR is above 12 dB and 17 dB, respectively.
As N increases to 10 , SNRaPD can consistently improve the accuracy to some degree for 7
SNR below 20 dB. Similarly, in comparing SNRaPD with APD, the accuracy is greatly
improved in moderate to high SNR as shown in Fig. 2.9(b). The improvement is negligible
when the SNR is below -4 dB, -8 dB, and -12 dB, respectively. The above discussion
illustrates the superiority of the proposed SNRaPD in “moderate” SNR. As the ambient SNR
is increased to the “moderate” range, SNRaPD can potentially be used and provide improved
accuracy in spaceborne measurement techniques, such as the total electron content (TEC)
measurements on a beacon receiver or the precise orbit determination (POD) on a GNSS
receiver [41-45]. For example, when N 106 and SNR 0dB on the 400 MHz beacon
signal, the phase error is 0.08 degrees and 0.94 degrees for SNRaPD and APD,
respectively. The estimation error of SNRaPD is approximately an order better than that of
APD. If more samples are utilized, the superiority of SNRaPD over APD remains significant
(b)
2.4 Summary
In this chapter, the high-accuracy phase estimation for one-bit SDR is investigated. We
propose the SNRaPD using the SNR information to reduce the estimation bias and achieve
the high-accuracy phase estimation. The mean values and variances of the I-Q channel
outputs in one-bit SDR are given by Eq. (2.11), Eq. (2.13) and Eq. (2.16), and the
SNR-dependent relationship of the mean I-Q channel outputs is explicitly shown in Fig. 2.2.
For high-accuracy phase estimation, NB-DPD can be used in high SNR as shown in Fig. 2.3.
For the low SNR, APD is selected according to Eq. (2.20), and its performance is illustrated
in Fig. 2.5. However, according to the asymptotic performance of NB-DPD and APD as
shown in Fig. 2.6, the estimation bias becomes significant and can have a negative impact on
the accuracy in moderate SNR. Focusing on this SNR range, we proposed SNRaPD using
Newton’s method to reduce bias and improve the resulting accuracy as shown in Fig. 2.7. The
accuracy of SNRaPD is certified by comparing the MSE with the AvCRB in Fig. 2.8. In
order to conserve computation time, an adequate stop criterion for SNRaPD with respect to
the noise variance is also defined by Eq. (2.45). Finally, the range of the application of
SNRaPD is investigated by comparing the associated RMSE with that of NB-DPD and APD
as shown in Fig. 2.9. Potential applications of SNRaPD and the corresponding performance
on SNR 0dB are also discussed. Nevertheless, the proposed SNRaPD requires the knowledge of SNR which is not available in many applications. Hence the joint phase and
Chapter 3
Joint One-Bit Phase and SNR Estimation
Generally, the SNR information is crucial for the quality control of the observed data [2,5]. Moreover, according to the results of chapter 2, the accurate SNR information enables
the accurate phase estimation. Since the SNR information may be unavailable in many
applications, we extend the algorithm for SNRaPD to jointly estimate of the phase and SNR.
Because the signals are one-bit quantized, the designed method can accommodate high
dynamic range applications.
In the following, the signal model of one-bit quantized sinusoidal carrier and the I-Q
correlation structure are revisited and adopted for joint phase and SNR estimation first. Next,
the nonlinear least-square algorithm of SNRaPD is extended to iteratively derive the phase
and SNR estimation. The performance of the proposed method is then verified by Monte
Carlo simulations. In addition, the feasibility of the proposed method for applications in
GNSS and beacon receivers is also discussed.
3.1 System Model
Consider a carrier with amplitude A , frequency f and phase c . When the signal is disturbed by AWGN, the observed wave is denoted by
) ( ) 2 sin( ) (t A f t n t x c (3.1) where n(t) is AWGN with zero mean and variance 2.
2 2
2
A . (3.2)
Note that Eq. (3.1) and Eq. (3.2) are different from their counterparts in chapter 2, i.e. Eq. (2.1) and Eq. (2.9), respectively, only on the amplitude A . When x(t) is one-bit quantized and sampled with period T , we have s
] ) sin( sgn[ )] T ( ) T 2 sin( sgn[ ] [ k k s s c n A k n kf A k x (3.3)
where k 2kf Tc s and sampling frequency follows the property of Eq. (2.3).
For parameter estimation, assume that the frequency f is known and the local I-Q c
components are sgn[sink] and sgn[cosk], respectively. After one-bit quantization, ]
[k
x is then multiplied by local I-Q components, and summed to have the I-Q correlation outputs denoted by
k k k x I [ ] sgn[sin (3.4) ]
k k k x Q [ ] sgn[cos . (3.5) ]Similar to Eq. (2.5), we consider p samples at tkTs, k0,1,2,,p1 in I-Q correlation outputs, where p is specified in Eq. (2.3). The normalized I-Q outputs from these samples
are expressed by 1 0 1 sgn[ sin( ) ] sgn[sin ] p p k k k k I A n p
(3.6)1 0 1 sgn[ sin( ) ] sgn[cos ] p p k k k k Q A n p
. (3.7)According to Appendix A, the mean values of Eq. (3.6) and Eq. (3.7) are denoted by
[ ,2 ) [0, ) 2 Q 2 sin( ) Q 2 sin( ) p k k I k k p
(3.8)
[ / 2,3 / 2) [0, / 2) [3 / 2,2 ) 2 Q 2 sin( ) Q 2 sin( ) p k k Q p k k
(3.9) where 2 1 Q( ) exp 2 2 x z x dz
.In addition, the variance of I-Q correlation outputs is given by
2 2 1 2 2 0 4 Q 2 sin( ) Q 2 sin( ) . p p I Q p k k k p
(3.10)When the number of samples is generalized to N m p and m is an integer, the I-Q outputs are denoted as I and m Q , respectively. Let their mean value be m and I Q, respectively. It is easily proved that prove I and m Q have the same mean values as m I p
and Q , i.e. p p I I and p Q Q
. In addition, the variance of I and m Q is given by m
2 2 1 2 2 0 4 Q 2 sin( ) Q 2 sin( ) . I Q N k k k N
(3.11)3.2 Nonlinear Least-Square Algorithm
After deriving the mean value of the I-Q correlation outputs, the nonlinear least-square algorithm is utilized to estimate the phase and SNR of the carrier. Let I and m Q be the m
I-Q outputs of one-bit quantized sinusoidal carrier. The phase and SNR of the carrier are
denoted by θ[,]T, where the superscript ‘T’ denotes the transpose operation. Let
) (θ
I
and Q(θ) be the mean values of I and m Q regarding parameter m θ , respectively. When the sampling frequency is carefully selected to have a large u , I and m
m Q can be expressed by I I m I (θ) (3.12) Q Q m Q (θ) (3.13) where and I Q are random variables in I-Q correlation outputs with variance given by Eq. (3.11).
To estimate the parameter θ, we construct a cost function as
2 2 2 2 1 2 T ( ) ( ( )) ( ( )) ( ( )) ( ( )) ( ) ( ) m I m Q f I Q y y θ θ θ θ θ y θ y θ (3.14) where T 2 1( ), ( )] [ ) (θ θ θ y y y .
The estimation of θ is denoted by
) ( min arg ˆ θ θ f . (3.15)
Equation (3.14) and Eq. (3.15) form a nonlinear least-square problem. According to Eq. (3.14), the gradient of f(θ) is given by
) ( ) ( 2 ) (θ J θ Ty θ f (3.16) where )J(θ is the Jacobian matrix of y(θ).
In addition, the Hessian matrix of f(θ) is denoted by
)) ( ) ( ) ( ( 2 ) (θ J θ TJ θ H θ F (3.17) where )H(θ is the matrix whose ( qp, )-th element is given by
2 1 2 j p q j j y y .The nonlinear least-square problem of Eq. (3.15) can then be solved, and θˆ is iteratively estimated by [40] ) ( )) ( ( 1 ) 1 ( ) ( θ F θ θ θi i f . (3.18)
The iteration of Eq. (3.18) is stopped when θ(i)θ(i )1 , where is a small number. When the stop criterion is reached after the i-th iteration, the estimated result is given by
) (
ˆ θi
θ . (3.19)
1) Initial value of phase
It is known that APD achieves MLE for discrete-time samples in a multi-bit scenario
[12]. For one-bit quantized data, although the accuracy may be degraded to some degree, the
initial phase of our approach can be readily determined by APD, which is denoted by
m m I Q 1 -0 tan . (3.20) 2) Initial value of SNR
After the initial phase is determined, let for 0 I(θ) and Q(θ) in Eq. (3.14). Then Eq. (3.14) is degenerated to be a function of . Subsequently, the initial SNR can be determined by searching the minimum value with respect to in Eq. (3.14). The one-dimensional search technique, the Golden section method [40], is used to find the initial SNR, i.e. 0. Note that the accuracy of 0 is affected by the variance of 0. Hence a loose stop criterion is used in the Golden section method to find the coarse 0, and the computation time can be conserved.
3.3 Simulation and Discussion
3.3.1 Monte Carlo simulation
The Monte Carlo simulations are used to verify the joint phase and SNR estimation method, wherein each case of different SNR and N is tested for 1000 trials. Let
MHz 157 . 1 c
f and fs 4.096MHz in the simulation, then p4096 according to Eq. (2.3). Assume ˆ is the estimated phase of the j-th trial, and j is the true phase. The root mean-squared error (RMSE) of phase estimation is defined by
2 / 1 1000 1 2 ) ˆ ( 1000 1 ) ˆ ( RMSE
j j . (3.21)For SNR estimation, the RMSE is normalized to clarify the performance, which is denoted by
2 / 1 1000 1 2 ) ˆ ( 1000 1 1 ) ˆ ( nRMSE
j j . (3.22) where ˆ is the estimated SNR of the j-th trial, and j is the actual SNR.In the nonlinear least-square algorithm of Eq. (3.18), the stop criterion is given by
0001 . 0
. In addition, for using the Golden section method to determine the initial SNR, a coarse resolution of 0.5 dB is used for the stop criterion. The one-bit ADC is commonly used
in low-power satellite applications. For potential applications on GNSS receivers, the
proposed method will be simulated for SNR as low as –30 dB. On the other hand, to illustrate
wide applicable range of our method, SNR up to 15 dB is also considered.
The performance of phase and SNR estimation are illustrated in Fig. 3.1 and Fig. 3.2,
respectively. Note that the RMSE of SNR is normalized and denoted by percentages. In Fig.
3.1, the RMSE of the phase is improved with increasing SNR and N . The phase RMSE’s
are below one degree when SNR is higher than –12 dB and –22 dB for N 105 and 6
10
N cases, respectively. Moreover, the accuracy of 0.1 degrees phase RMSE is achieved when SNR is higher than 12dB and –2dB in each case. According to Fig. 3.2, the SNR
estimation performs well in moderate SNR. Accurate SNR information can be used to learn
the achieved accuracy of phase estimation in this range. Specifically, the nRMSE is less than
10% for 21dBSNR13dB when N 105 and for 30dBSNR14dB when 6
10
N . Moreover, the estimation of SNR can be very accurate, i.e. nRMSE1%, when
6
10
Fig. 3.1. RMSE of phase estimation.
Note that the nRMSE attains the lower bound when SNR is around 4 dB, and increases in
higher SNR. This phenomenon is investigated by plotting the mean I-Q outputs for
dB 15 SNR dB
0 as shown in Fig. 3.3. When SNR increases, the distance between neighboring curves becomes smaller and the distinction between them is little. Specifically,
for SNR4dB (dotted lines), the separations between the curves are recognizable. However, the distinction between curves becomes closer when SNR4dB (solid lines). Consequently, when slight variance occurs in the obtained I-Q correlation outputs for SNR
higher than 4 dB, the obtained Im and Qm will be fitted to I(θ) and Q(θ) with significant SNR error in the cost function of Eq. (3.14). Therefore, the performance of SNR
estimation becomes degraded. Especially, when SNR10dB , the curves are nearly overlapped, and the error in SNR estimation increases rapidly.
Recalling that the variance of I-Q correlation outputs is approximately inversely
proportional to N , the standard deviation (STD) will decrease with N . Hence, the
performance of the nonlinear least-square algorithm can be improved with N . This is consistent with the simulation results shown in Fig. 3.1 and Fig. 3.2. The results suggest that
N can be increased to compensate for the loss of amplitude information due to one-bit
quantization and the desired accuracy can be achieved.
3.3.2 Range of applications
GNSS receiver: For applications using carrier phase in GNSS receivers, the signal bandwidth is assumed to be 2 MHz concerning the coarse/acquisition (C/A) code. According to the
measured results of [46], when the elevation angles between 20° and 90° are of interest, SNR
from –30dB to –10 dB will be considered for different applications. According to the
simulation results of N 106, the phase RMSE’s of our method are 2.5545 and 0.25203
degrees for SNR of –30dB and –10 dB, respectively. For L1 carrier (1575.42 MHz), these
errors correspond to 1.35 mm and 0.13 mm in length, and 1.73 mm to 0.17 mm for L2 carrier
(1227.6 MHz). Such performances are close to those of high-quality receivers [44, 46]. Note
that C/A code synchronization is assumed to be achieved before carrier phase estimation. In
addition, the nRMSE of SNR is less than 9% when N 106 and SNR is between –30dB and
–10 dB. Regarding the potential application of POD in low Earth orbit satellites (LEO), the
accuracy of the orbit will be influenced by the satellite center variation, the attitude error, and
the antenna phase variation, which are at the centimeter level [47]. Our achieved phase
RMSE is much smaller than these variations. In addition, the phase RMSE is also
insignificant with respect to the ultimate accuracy after the orbit determination algorithm
reported in [47-49]. Hence, even though the proposed one-bit processing method is adopted,
the reported accuracy of POD in literatures can still be achieved. Furthermore, the quality of