國
立
交
通
大
學
電信工程研究所
碩
士
論
文
針對無線感知網路下多頻帶
傳輸機制的設計與分析
Design and Analysis of Transmission Strategies in
Channel-Hopping Cognitive Radio Networks
研 究 生:李其懋
指導教授:方凱田 教授
針對無線感知網路下多頻帶傳輸機制的設計與分析
Design and Analysis of Transmission Strategies in
Channel-Hopping Cognitive Radio Networks
研 究 生:李其懋 Student:Chi-Mao Lee
指導教授:方凱田 Advisor:Kai-Ten Feng
國 立 交 通 大 學
電信工程研究所
碩 士 論 文
A Thesis
Submitted to Department of Communications Engineering
College of Electrical and Computer Engineering
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master of Science
in
Communications Engineering
June 2010
針對無線感知網路下多頻帶
傳輸機制的設計與分析
學生: 李其懋 指導教授: 方凱田 教授
國立交通大學電信工程研究所碩士班
摘 要
近幾年來,基於跳頻選擇機制的資源擷取控制通訊協定 (channel-hopping based medium access control (MAC) protocols) 被提出來增進分散式多頻帶無 線感知網路 (cognitive radio (CR) networks) 下的通道容量而不需使用額外的 控制通道,在其中,每個感知使用者必須隨機去跟隨初始的跳頻序列 (channel-hopping sequence) 去進行通道的偵測以及資料傳輸。在本論文中,無 線隨意感知網路基於跳頻選擇機制的資源擷取控制通訊協定在配對傳輸以及廣義 傳輸的模式底下,考慮現實感知網路中的不完美通道檢測以及同步,利用排隊理 論模型 (queueing theory) 提出感知網路下的通道吞吐量分析以及主要使用網路 (primary networks) 所能提供的通道空閒資源和其所受感知使用者影響所產生的 封包延遲。接著,根據此分析模型,基於動態規畫 (dynamic programming) 的技 巧,在主要使用者的封包延遲限制之下提出最佳的跳頻選擇機制 (OCS),藉著開 發最佳的資源分配機制去平衡通道空閒資源和通道使用率,此方法可以找出此網 路底下最佳的通道吞吐量,同時降低對主要使用者的干擾。除此之外,在廣義的 傳輸模式底下存在著所謂的邏輯分割問題 (logical partition problem),由於 感知網路中感知使用者溝通成功率的下降,它會造成網路中吞吐量嚴重的減少, 由其是在比較雍塞的感知網路底下,因此,在此論文中,兩個演算法被提出來減 緩此問題的發生,它們分別是喚醒連續競爭機制 (WSC) 以及喚醒計數器重設連續 競爭機制 (WCSC),藉由解決不完美通道檢測所產生的盲點,造成感知使用者被阻 擋在通道外面,此兩種方法可以增加感知使用者間溝通的次數,更而增加網路中 的吞吐量。從模擬的結果中可以看出所提出的最佳的跳頻選擇機制、喚醒連續競 爭機制、喚醒計數器重設連續競爭機制的確和其它傳統的跳頻機制相比可以大幅 提升網路的吞吐量,並且確保主要使用網路的封包延遲限制。Design and Analysis of Transmission Strategies in
Channel-Hopping Cognitive Radio Networks
Student : Chi-Mao Lee Advisor : Kai-Ten Feng
Department of Communications Engineering National Chiao Tung University
Abstract
In recent years, channel-hopping based medium access control (MAC) protocols are proposed to improve the capacity in a decentralized multi-channel cognitive radio (CR) networks without extra usage of a control channel. Each CR user has to stochastically follow a default channel-hopping sequence in order to sense a channel and to conduct its frame transmission. In this thesis, based on the channel-hopping protocol in both the paired and generalized CR network, an analysis is conducted on both the prob-ability of channel availprob-ability and the average frame delay for the primary queueing networks. Analytical model is proposed by considering the impact caused by the im-perfect sensing of the CR users and the imim-perfect synchronization between the primary and CR networks. According to the proposed model with realistic considerations, an optimal channel-hopping sequence (OCS) approach is designed for the CR users based on dynamic programming technique. It is designed by exploiting the optimal load bal-ance between both the channel availability and channel utilization within the delay constraints of primary users (PUs). By adopting the OCS approach, the maximum aggregate throughput of CR users and the quality of service (QoS) requirement of PUs can both be achieved. Moreover, in addition to the paired CR networks, the logical par-tition problem that occurs in the generalized CR network will also be addressed. The
problem can severely degrade the aggregate throughput due to the decreasing proba-bility in connectivity between the CR users, especially under CR network with heavy traffic. Therefore, both the wake-up successive contention (WSC) and the wake-up counter-reset successive contention (WCSC) algorithms are proposed to increase the number of negotiations by exploring a blind spot in imperfect sensing and amending the contention mechanisms between the CR users. Numerical results illustrate that the proposed OCS, OCS-WSC, and OCS-WCSC schemes can effectively maximize the aggregate throughput compared to the conventional channel-hopping sequences, and as well guarantee the QoS requirement of the PUs.
誌 謝
當嗡嗡的蟬鳴聲緩緩地響起,畢業的季節也逐漸地靠近了,碩士兩年的時光 也在論文口試緊張的氛圍中畫下了句點,在此要先感謝蘇育德、王蒞君兩位教授 特地撥冗位參加其懋的口試與口試過程中傾囊相授的指點,讓其懋認知到了自己 的在此研究領域的渺小。遙想初進實驗室,內心充滿對研究的敬畏和恐懼,但是 在方凱田指導教授不斷的鼓勵下,讓我快速的從挫折中跌倒了再爬起來,其懋點 滴在心頭。其中,實驗室的佳仕、裕斌、柏軒三位博班學長更在研究的過程中不 斷的給我意見與討論,讓我可以激發更多有趣的創意與思考,建華、文俊、仲賢、 三位博班學長也會適時的給我最新的通訊新知,讓我不致於侷限在單一研究領域 除了在研究之外,實驗室的承澤、俊宇、萬邦同學也讓我學到他們處理事情態度 的人生哲理,讓我在生活中多了些調劑。也敬祝實驗室的學弟妹們惟能、紹凱、 瑞鴻、昭華、宥儒能夠快快樂樂的享受研究上帶給你們的新視野、新體驗。最後, 我想感謝一路陪我渡過這段時光的家人,他們是我在遇到困難時的依靠與慰藉。 。Contents
Chinese Abstract i
English Abstract ii
Acknowledgement iv
Contents v
List of Figures vii
1 Introduction 1
2 Proposed Optimal Channel-Hopping Sequence (OCS) Approach
un-der Paired CR Networks 6
2.1 Imperfect Sensing . . . 9 2.2 Probability of Channel Availability for CRPs and PU’s Average Frame
Delay . . . 10 2.3 Aggregate Throughput of CRPs . . . 14 2.4 Proposed OCS Approach . . . 16 2.5 Dynamic Programming Formulation for Proposed OCS Approach . . . 18 3 Proposed Optimal Channel-Hopping Sequence (OCS) Approach
un-der Generalized CR Networks 20 3.1 Aggregate Throughput and Proposed OCS Approach . . . 22 3.2 Enhancement with Wake-Up Successive Contention (WSC) Algorithm . 25 3.3 Enhancement with Wake-Up Counter-Reset Successive Contention (WCSC)
Algorithm . . . 28
4 Performance Evaluation 29
4.1 Simulation Parameters . . . 29 4.2 Simulation Results . . . 30 4.2.1 Determination of Quantized Level in DP Formulation . . . 30 4.2.2 Performance Validation and Comparison under Paired CR Networks 32
4.2.2.1 Characterization of Channel-Hopping Probability for a Single Channel . . . 32 4.2.2.2 Performance Validation and Comparison . . . 34 4.2.3 Performance Validation and Comparison under Generalized CR
Networks . . . 37 4.2.3.1 Performance Validation of Proposed OCS Approach . . 37 4.2.3.2 Performance Comparison . . . 39 4.2.3.3 Enhancement with WSC and WCSC Mechanisms . . . 41
List of Figures
2.1 Network scenarios for the coexistence of both the primary and the CR networks. . . 7 2.2 Timing diagram for the coexistence of both the primary and the CR
networks. . . 7 3.1 Flow diagram of the proposed WSC algorithm. . . 25 3.2 Flow diagram of proposed WCSC algorithm. . . 27 4.1 Determination of quantized level ∆p with pd= 0.93 and number of
chan-nels M = 4 (each channel with PU’s arrival rate λi = 0.1, 0.1, 0.3, 0.3 for
i = 1, 2, 3, 4). . . . 31
4.2 Performance of CRPs for a single channel with pd = 0.93 (dashed line)
and pd= 0.95 (solid line) under PU’s arrival rate λi = 0.05, 0.2, and 0.4
denoted by ◦, M, and ¤ curves, respectively. . . . 33 4.3 Performance Comparison under pd= 0.93 and number of channels M = 4
with PU’s arrival rate at each channel as λi = 0.05, 0.05, 0.4, 0.4 for
i = 1, 2, 3, 4. . . . 35
4.4 Performance validation of OCS scheme under pd = 0.93 and number
of channels M = 4 with PU’s arrival rate at each channel as λi =
4.5 Aggregate throughput of CRUs under different channel-hopping sequences with pd= 0.93 and number of channels M = 4 (each channel has arrival
rate λi = 0.1, 0.1, 0.3, 0.3 for i = 1, 2, 3, 4). . . . 40
4.6 Aggregate frame delay of PUs under different channel-hopping sequence with pd= 0.93 and number of channels M = 4 (each channel has arrival
rate λi = 0.1, 0.1, 0.3, 0.3 for i = 1, 2, 3, 4). . . . 40
4.7 Simulation for Comparison between proposed algorithms in pd = 0.93
and W = 64 with λCR = 1 (dashed) and λCR = 0.6 (solid) under OCS,
OCS-WSC and OCS-WCSC (M, ◦, and ¤ curves, respectively) and num-ber of channels M = 4 (each channel has arrival rate λi = 0.1, 0.1, 0.3, 0.3
for i = 1, 2, 3, 4). . . . 41 4.8 Simulation for Comparison between proposed algorithms in pd = 0.93
and W = 16 with λCR = 1 (dashed) and λCR = 0.6 (solid) under OCS,
OCS-WSC and OCS-WCSC (M, ◦, and ¤ curves, respectively) and num-ber of channels M = 4 (each channel has arrival rate λi = 0.1, 0.1, 0.3, 0.3
for i = 1, 2, 3, 4). . . . 42 4.9 Simulation for Comparison between proposed algorithms in pd = 0.96
and W = 16 with λCR = 1 (dashed) and λCR = 0.6 (solid) under OCS,
OCS-WSC and OCS-WCSC (M, ◦, and ¤ curves, respectively) and num-ber of channels M = 4 (each channel has arrival rate λi = 0.1, 0.1, 0.3, 0.3
Chapter 1
Introduction
The increasing demand for spectrum resource lately has caused the so-called spectrum scarcity problem primarily due to the conventional approaches of static spectrum al-location. According to the regulations from FCC [1], a large portion of the priced frequency spectrum is underutilized in most of the time and location, i.e., known as spectrum holes. Consequently, cognitive radio (CR) for dynamic spectrum access (DSA) has been prevailing exploited for more efficient spectrum utilization over the licensed bands [2] such as the IEEE 802.22 [3; 4] standard. It is an emerging standard that allocates spectrums for TV broadcast services via a license-exempt basis. The CR user (CRU), i.e., unlicensed user, is capable of sensing the channel condition and can adapt its internal parameters to access the licensed channels while these channels are not being utilized by the primary users (PUs), i.e, licensed users. In addition to the IEEE 802.22 standard which focused on specification for a centralized CR network, there are also a great number of research interested in decentralized DSA in multi-channel TDMA-based (i.e., time slotted-TDMA-based) primary networks. The main focus is on how to design a medium access control (MAC) protocol to effectively exploit the channel availability under the overlay paradigm considering that both the PUs and CRUs cannot transmit
simultaneously [5].
These MAC protocols can be categorized into two different types of schemes ac-cording to their access strategies, including the sensing-based and the probability-based methods. The sensing-based scheme [6; 7] indicates that the CRUs have to sense part of the channels before deciding which channel to access. In general, it will lead to higher channel utilization and reduced complexity in handshaking mechanism since the hidden multi-channel problem [8] can be alleviated. However, it is considered impractical [9–11] under hardware limitation for each CRU to equip multiple transceivers to conduct spec-trum sensing or inefficient for a CRU to sense and switch among the entire frequency spectrums within a slot time in order to obtain the required knowledge of spectrum map. On the other hand, the probability-based scheme indicates that the CRUs have to decide which channel to sense according to certain statistical information from the PUs and consequently transmit their data. This type of scheme is implemented to amend the problem arising from sensing-based protocols by considering each CRU can only possess a single transceiver for channel sensing. Therefore, it becomes important for the CRUs to accurately acquire the opportunities for accessing an idle channel in an efficient manner.
In [14], an opportunistic spectrum access MAC protocol was proposed by utilizing a common control channel for the CRUs to both negotiate the channel reservation and determine which channel to sense based on the stationary idle probability of the PU in each channel. However, the usage of an additional common control channel is still in controversy. The partially observable Markov decision process (POMDP) framework in [9] provides an optimal sensing strategy for a CRU to select and sense a channel which has the highest probability in maximizing the network throughput. However, the proposed framework is computationally complex and is not suitable for networks with multiple CRUs. In [15], an optimal channel sensing policy for a more practical CR
networks is explored by considering imperfect global synchronization between the CR and primary networks. The Munkres algorithm with low computational complexity is adopted to solve the optimization problem in channel selection. However, the proposed scheme is only appropriate for the CR network with only a single pair of CRUs to com-municate with each other. On the other hand, the channel-hopping based protocols are proposed in [8; 11; 12] where multiple pairs of CRUs are considered to switch among the licensed channels with their distinct default channel-hopping sequences. When a CR transmitter wants to communicate with its intended CR receiver, the CR transmitter changes its hopping schedule and follows the channel-hopping sequence of the intended receiver in order to conduct the negotiation and consequently transmit the data if the channel is not currently utilized by the PU. However, the channel-hopping sequences in these schemes are uniformly generated in each channel, which is considered to be appro-priate only for homogeneous primary channels. Within heterogeneous channels, there should exist more feasible channel-hopping sequences to explore the channel availability for the CRUs.
Furthermore, it is assumed in most of the existing sensing-based and probability-based protocols that the CRUs are required to be synchronized with the PUs and to exactly sense either the idle or busy state of the PUs. However, these two assumptions are considered impractical in realistic circumstances due to the reasons as follows: (a) there is no communication that is recognized between the primary and the CR networks which makes global synchronization difficult; and (b) the long sensing time for perfect spectrum sensing will degrade the channel utilization especially for shorter slot time. In this thesis, based on the channel-hopping schemes, analytical models are studied for both the probability of channel availability for the CRUs and the average frame delay of the PUs. It is noted that the CR networks with both the paired CRUs and arbitrary communications between the CRUs, i.e., the generalized CR network, are considered
for establishing the analytical models. The proposed models incorporate the possible collision events owing to imperfect synchronization and sensing under a primary network containing multiple channels, and each channel is modeled as a Geo/G/1 queueing system. By exploiting this realistically coexisting system, the optimal channel-hopping sequence (OCS) based on dynamic programming (DP) is derived in order to achieve maximum aggregate throughput for the CRUs and the average frame delay of the PUs with quality of service (QoS) guaranteed. Based on the proposed OCS scheme, optimal load balance can be achieved between the probability of channel availability and channel utilization within the CR network under the knowledge of frame arrival probabilities of the PUs.
Moreover, the logical partition problem as described in [13] will occur in the general-ized CR network, where the CR transmitter cannot find its corresponding CR receiver since the receiver may switch to another channel in order to serve as a transmitter to conduct data delivery for another receiver. In such case, severe degradation in aggre-gate throughput can happen due to the decreased probability in connectivity between the CRUs, especially under heavy CR traffic. Therefore, two algorithms, i.e., the wake-up successive contention (WSC) and the wake-wake-up counter-reset successive contention (WCSC) are proposed to enhance the aggregate throughput in the generalized CR net-works. These two schemes focus on how to amend the logical partition problem by increasing the number of negotiations from a blind spot in imperfect sensing and re-vising the contention mechanisms between the CRUs. Numerical results are presented to illustrate the performance evaluation of the proposed OCS, WSC, and OCS-WCSC approaches in comparison with the conventional schemes. It can be observed that the proposed algorithms are feasible to capture the rapidly varying opportunities of spectrum holes for the CRUs.
analysis for system model with CRUs in the paired CR networks. Based on the analysis, the proposed OCS scheme is modeled and derived by dynamic programming. In Chapter 3, the proposed OCS algorithm associated with the enhanced schemes are addressed under the generalized CR networks. Chapter 4 illustrates the performance evaluation for the proposed OCS, OCS-WSC, and OCS-WCSC mechanisms; while the conclusions are drawn in Chapter 5.
Chapter 2
Proposed Optimal
Channel-Hopping Sequence (OCS)
Approach under Paired CR
Networks
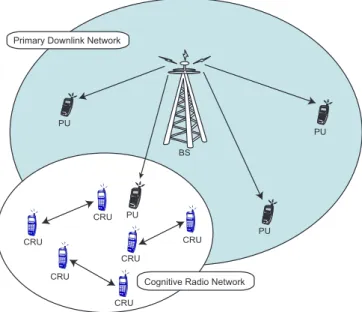
The schematic diagram for the coexistence of both the primary and the CR networks is illustrated in Fig. 2.1. Noted that centralized downlink communication is considered for the primary network while the CRUs in the CR network communicate with each other based on the distributed manner. The timing diagram of multichannel operations for these two networks is shown in Fig. 2.2. Both the primary and the CR networks are slotted systems with the same slot duration Ts, where the time slots for the CR network
are depicted as the dotted vertical lines in Fig. 2.2. Since there is no communication between the PUs and CRUs, imperfect synchronization is considered where the time difference between these two networks can be observed at each starting epoches. For example as shown in Fig. 2.2, the asynchronous time difference is obtained as ∆t =
PU BS PU PU CRU CRU CRU CRU CRU CRU Primary Downlink Network
Cognitive Radio Network PU
Figure 2.1: Network scenarios for the coexistence of both the primary and the CR networks. Ts u u u Ch1 u t2 t1
PU’s transmission without collision CRPs’ transmission without collision collision between PU and CRPs
inter CRPs’ collision PF,1 PD,1 1-PF,1 PD,1 1-PD,M PD,1 S1,M =3 1-PF,M PD,M PD,M PF,M 1-PD,M PD,M Ch2 Ts S1,1=1 S1,1=2 τ data sensing conten!on W ʽʳδ CRPs’ frame structure t3
frame 1 frame 2 frame 2
frame 3
frame 3 frame 3 frame 4 frame 4 frame 4
Arrival Departure
ChM
Virtual Ch
PD,M
Figure 2.2: Timing diagram for the coexistence of both the primary and the CR net-works.
t2− t1 where the PU in channel 2 starts transmitting the data at time t1 and a CRU
transmits its frame at t2. Furthermore, for the primary network with M identical
bandwidth channels, each of them is independently occupied by a PU with Bernoulli arrival process [16; 17] with the probability λi of one frame arrival and the probability
1 − λi of no frame arrival at the starting epochs for i = 1, 2, ..., M . It is noted that
infinite queue capacity is assumed for each channel, where the frame duration is equal to a slot length as shown in Fig. 2.1. Given that the PUs will retransmit data until success, i.e., no collisions happened to a frame, the service length can be determined which will be presented in Chapter 2.2.
In order to discuss the channel-hopping protocol for multiple CRUs, a simplified CR network with CRUs communicating in pairs will be discussed in this chapter. The generalized network with CRUs arbitrarily communicating with each others will be addressed in the next chapter. The single-hop ad-hoc CR network contains N pairs of CRUs (CRPs) with saturation traffic, where each pair is consisted of two CRUs including a transmitter and a receiver. It is assumed that data communication only happens within a CRP and all CRPs are affected by the same set of PUs. Based on the channel-hopping protocol as in [11], each CRP has to follow a default channel-hopping sequence generated by a pseudo random generator with the same discrete probability distribution P, which is defined as P = [p1, ..., pM, pvir] with pi denoting the
channel-hopping probability for i = 1, 2, ..., M . The distribution P is utilized to stochastically determine which channel to hop to, and to carry out sensing and contending for data transmission in a reasonably fair manner. In other words, the design of P corresponds to the design of a channel-hopping sequence. The frame structure of CRPs including sensing, contending, and data transmission phases is illustrated in Fig. 2.2. Moreover, the virtual channel that accounts for the relinquishment in transmissions of certain CRPs is represented as pvir = 1 −
PM
2.1
Imperfect Sensing
In realistic situation, sensing decisions of the CRPs is considered imperfect. In order to represent the effects from imperfect sensing, two probabilities are considered as follows: (a) the detection probability pd for detecting the PU when the PU does exist, and (b)
the probability of false alarm pf a for detecting the PU while the PU does not exist.
The relationship between pd and pf a has been studied in [18] for an energy detector,
which can be obtained for each CRP as
pf a = Q( p 2γ + 1 Q−1(p d) + p τ fsγ), (2.1)
where τ is the sensing time, γ is the PU’s signal-to-noise ratio (SNR) acquired at the CRP’s receiver, and fs denotes the channel sampling rate of the CRP. The Q(·)
function represents the complementary distribution function of a standard Gaussian variable. Noted that the detection probability pd is also called the sensing threshold
which can be adjusted by the CRP, and pf a is an increasing function of pd under fixed
values of τ , γ, and fs.
According to (2.1), it can be found that significant amount of sensing time τ is required for achieving perfect sensing, i.e., to exactly sense the state of PU to be either busy (pd= 1) or idle (pf a = 0). The required time for perfect sensing is considered much
larger than the slot duration Ts = 10 ms as specified in IEEE 802.22 standard [3; 19]
owing to the limitation in hardware and sensing algorithms. Therefore, perfect sensing is considered impractical and will severely degrade the channel utilization. Furthermore, by assuming all the CRPs with the same sensing threshold pd, the average detection
probability PD,ifor CRPs hopping to channel i all with correct detection and the average
respectively written as PD,i = N X n=0 HN,n,ipnd = [1 − pi(1 − pd)]N, (2.2a) PF,i = N X n=0 HN,n,ipnf a = [1 − pi(1 − pf a)]N, (2.2b)
where HN,n,i represents the probability of n out of the N CRPs hopping to channel i
with probability pi as HN,n,i= µ N n ¶ pni(1 − pi)N −n. (2.3)
Based on the probabilities PD,i and PF,i as derived in (2.2a) and (2.2b), the probability
of channel availability, the average frame delay of PUs, and the aggregate throughput in the CR network will be obtained in the following sections.
2.2
Probability of Channel Availability for CRPs
and PU’s Average Frame Delay
In this section, the impacts caused by imperfect synchronization and sensing of CRPs are analyzed in the probability of channel availability and average frame delay of the primary queueing network. The primary network in each channel is a Geo/G/1 discrete-time queueing system with retransmitting capability if its frames are collided by the CRPs. Noted that the arrivals and departures, i.e., the service completions, of the primary network should occur at the starting epochs simultaneously. However, this type of system in considered intractable for analyzing the average system size. In order to ensure the analysis to be tractable, the arrival first (AF) scheme [20] is introduced as the scheduling policy for the queue. In other words, the frame arrivals takes precedence over departures at the starting epochs, e.g., at time t3 in channel 2 as shown in Fig.
2.2. It has been proven in [20] that the distribution of system size observed at the departure points by adopting the AF scheme will be identical to that of the original Geo/G/1 system. Therefore, the probability of channel availability for the CRPs and average frame delay of the PU can be analyzed based on the derivation of system size distribution at the departure points as in [21; 22].
Considering channel i for i = 1, 2, ..., M , let Xm,i be defined as the discrete random
variables (RVs) of the number of system size observed at the mth departure point. S1,i
and S2,i are denoted as the RVs of service time under the condition that Xm,i = 0 and
Xm,i > 0, respectively. A1,i and A2,i are defined as the RVs of the number of arrival
frames in the condition that the service time is equal to S1,i and S2,i, respectively. The
relationship between Xm,i, A1,i, and A2,i can be derived as
Xm+1,i = A1,i Xm,i = 0,
Xm,i+ A2,i− 1 Xm,i ≥ 1.
(2.4)
Consequently, the probability mass function (PMF) ar,k,i = P r(Ar,i = k) for the number
of arrival frames Ar,i with r = 1 and 2 can be obtained as
ar,k,i = ∞
X
l=k
P r(Sr,i = l)P r(Ar,i = k|Sr,i = l) = ∞ X l=k µ l k ¶ P r(Sr,i = l)λki(1 − λi)l−k. (2.5) Fig. 2.2 depicts the relationship between S1,i and the CRPs’ sensing actions, i.e.,
PD,i and PF,i, by considering the cases of S1,i = 1, 2, and 3. Noted that S1,i also
means the service time condition on the case that there does not exist PU’s frame in the previous slot according to the PU’s clock. Therefore, it can be observed that the sensing action made by the CRPs in the previous slot becomes either PF,i or 1 − PF,i,
frame transmitted by the PU requires two CRPs’ successive PD,i except for S1,i = 1.
Consequently, both cases S1,i = 1 and S1,i > 1 should be considered respectively.
Moreover, the first sensing probability of either PF,i or 1 − PF,i condition on S1,i > 1
should also be studied since the second sensing action should be 1 − PD,i if the first
sensing action is PF,i. It is noted that S1,i = 1 represents the first sensing action as PF,i
and the second sensing action to be PD,i. Furthermore, the SNR of CRPs is considered
higher than that of PUs owing to the shorter communication range in the CR networks. The carrier sensing in the contention phase cannot detect the existence of PU due to the difference of natures from the detector in spectrum sensing [23]. Let c1,i(z) and
qi(z) be respectively defined as the z-transform of the PMF of S1,i and the PMF of
transmitting until the existence of two successive PD,i. According to (2.2a) and (2.2b),
c1,i(z) can be written as
c1,i(z) = PF,i[PD,iz + (1 − PD,i)qi(z)z] + (1 − PF,i)qi(z), (2.6)
and qi(z) is derived by recursive method as
qi(z) = fi(z)[PD,iz + (1 − PD,i)qi(z)z],
which can further be reorganized as
qi(z) =
PD,ifi(z)z
1 − (1 − PD,i)fi(z)z
, (2.7)
where fi(z) represents the z-transform of geometric distribution with parameter PD,i
as
fi(z) =
PD,iz
1 − (1 − PD,i)z
Furthermore, S2,i denotes the service time for a new frame, i.e., not a retransmitting
frame, served right after the previous frame. It indicates that the sensing action of CRPs in the last slot must be PD,i such that the previous frame can leave the queue. The
z-transform of the PMF of S2,i can be derived similar to S1,i as
c2,i(z) = PD,iz + (1 − PD,i)qi(z)z, (2.9)
where qi(z) is obtained from (2.7). Let hr,i(z) be defined as the z-transform of ar,k,i
in (2.5) for r = 1 and 2. The following relationship between hr,i(z) and cr,i(z) can be
obtained: hr,i(z) = ∞ X k=0 ar,k,izk = ∞ X l=0 P r(Sr,i = l)(1 − λi+ λiz)l= cr,i(1 − λi+ λiz). (2.10)
Moreover, let πj,i be defined as the steady state probability of Xm,i = j, i.e., with
m → ∞. The value of πj,i corresponds to the steady state system size observed at the
departure points, which can be acquired as
πj,i= π0,ia1,j,i+
j+1
X
k=1
πk,ia2,j−k+1,i. (2.11)
Based on (2.10), the z-transform of πj,i, denoted as gi(z), can be derived as
gi(z) =
π0,i[h1,i(z)z − h2,i(z)]
z − h2,i(z)
. (2.12)
Therefore, according to the boundary conditions gi(1) = 1, h1,i(1) = 1, and h2,i(1) =
L’Hopital’s rule as
π0,i =
1 − h02,i(z)
h0
1,i(z)z + h1,i(z) − h02,i(z)
¯ ¯ ¯ ¯ ¯ z=1 , (2.13)
where h0r,i denotes the derivative of hr,i. The average frame delay of the PU can be
derived by adopting the Little’s Theorem as
Di(pi) = Li(pi)/λi, (2.14)
where the average system size Li(pi) is acquired by taking the derivative of (2.12) at
z = 1 using the L’Hopital’s rule as
Li(pi) = ∞ X j=0 jπj,i = g 0 i(z)|z=1. (2.15)
It is noted that the probability of channel availability for the CRPs π0,i in (2.13) will
be utilized in the computation of system throughput in the next section. The average frame delay of the PU Di(pi) in (2.14) will be adopted as the major constraint of the
proposed optimization problem in chapter 2.4.
2.3
Aggregate Throughput of CRPs
Based on the analysis in the primary network under certain channel-hopping sequence of the CRPs, the aggregate throughput of CRPs can be obtained according to the CRP’s frame structure as shown in Fig. 2.2. With the CRPs transmitting in a single-hop wireless network, there are n out of N CRPs single-hopping to the ith channel with the probability HN,n,i as defined in (2.3). Due to imperfect sensing, there is probability of
α out of n CRPs with correct sensing while channel i is idle as Fn,α = µ n α ¶ (1 − pf a)αpn−αf a . (2.16)
After sensing the channel availability, the contention-based scheme as defined in IEEE 802.11 distributed coordination function (DCF) mode [24] will be adopted, which con-sists of two-way handshakes including data transmission and acknowledgement. The
α CRPs who sense the channel idle will have the privilege to contend for data
trans-mission. Each CRP will wait for a randomly chosen backoff value in the interval of [0, W − 1], where W denotes a fixed window size. The CRPs can transmit data only if their backoff values count down to zero, and they will stop the backoff process if data transmission from other CRP has been observed while listened. Noted that exponential backoff and RTS/CTS exchanges are not adopted in this thesis since smaller frame size of CRP are considered. The reason for using smaller CRP’s frame size is due to the requirements for frequent channel sensing in order to serve for the highly time-varying CR traffic. Moreover, the slot size Ts is in general selected with small values [3; 25]
according to the underlying CR specifications. It is consequently reasonable to allow only a single frame transmission in each time slot. Therefore, the average successful transmission time Cα with no inter-collision between α CRPs can be obtained as
Cα = α W W X β=1 [Ts− (β − 1)δ − τ ] µ 1 − β W ¶α−1 , (2.17)
where δ denotes the minislot for carrier sensing. Based on (2.3), (2.13), (2.16), and (2.17), the throughput of the CRPs in the ith channel ηi(pi) can be acquired as
ηi(pi) = 1 Ts π0,i(1 − λi) N X n=1 n X α=1 HN,n,iFn,αCα, (2.18)
where the unit of the throughput is in time slots. The throughput of the CRPs in the
ith channel ηi(pi) in (2.18) scaled with normalization factor 1/Ts is composed by the
probability of channel availability π0,i in (2.13) and the probability of (1 − λi) that no
PU is conducting data transmission while a CRP is successfully transmitting. As a result, the aggregate throughput for all M channels with the probability distribution P can be obtained as η(P) = M X i=1 ηi(pi) = 1 Ts M X i=1 π0,i(1 − λi) · Npi(1 − pf a) W ¸ · W X β=1 [Ts− (β − 1)δ − τ ] · 1 −βpi(1 − pf a) W ¸N −1 . (2.19)
In the next section, the aggregate throughput η(P) derived in (2.19) will be utilized as the optimization criterion for the proposed OCS scheme.
2.4
Proposed OCS Approach
In the previous section, the throughput analysis is conducted in the realistic circum-stance with the coexistence of the PUs and the CRPs. In this section, an approach for obtaining OCS will be developed which not only can maximize the aggregate through-put of the CRPs in (2.19) but also ensures the QoS requirements of the PUs under the knowledge of PUs’ frame arrival probability. The optimization problem for OCS can
be formulated as P∗ = arg max P η(P) s. t. Dmin ≤ Di(pi) ≤ Dc,i, i = 1, 2, ..., M 0 ≤ pi ≤ 1, i = 1, 2, ..., M M X i=1 pi ≤ 1, (2.20) where P∗ = [p∗
1, ..., p∗M, p∗vir] represents the corresponding OCS with p∗i denoting the
optimal channel-hopping probability. The average frame delay of PU Di(pi) is obtained
from (2.14). The parameter Dc,i indicates the delay constraint for the QoS requirement
of PU in channel i, and Dmin corresponds to a slot size if there is no collision within
the PU’s transmissions. In other words, the emphasis of this thesis is to obtain OCS in
N CRPs for optimal load balance under the consideration of PU’s QoS requirements.
Interestingly, the optimization problem in (2.20) can be viewed as a sequential optimal decision problem from channel 1 to M. However, due to the nonlinear relationship between the throughput at the ith channel ηi(pi) in (2.18) and the probability pi for
i = 1 to M , each decision on the hopping probability pi cannot be independently
determined since the throughput will be influenced by the rest of undecided channels. In other words, it is not possible to directly allocate 100% hopping probability into a channel with the lowest frame arrival probability since potential throughput may exist in the rest of channels that are unassigned with hopping probabilities. In order to resolve this problem, the DP-based approach in [27] is utilized for obtaining the OCS as will be shown in the next section.
2.5
Dynamic Programming Formulation for Proposed
OCS Approach
In this section, the optimization problem in (2.20) for multiple channel operations can be formulated into a DP problem based on [27]. A reward function φi(²i) at channel
i denotes the maximum value of throughput summed from channel i to channel M
with the channel available probability ²i, which is the probability to be allocated from
channel i to channel M. Moreover, an instant reward function is defined to be ηi(pi)
as in (2.18) plus the constraint pc,i on the channel-hopping probability pi. Noted that
the constraint pc,i is a replacement of the delay constraint Dc,i since the average frame
delay Di(pi) in (2.14) is a strictly increasing function, i.e. one-to-one mapping, of the
channel-hopping probability pi. The DP recursive form can therefore be written as
φi(²i) = max
0≤pi≤min{pc,i, ²i}
{ηi(pi) + φi+1(²i− pi)}, (2.21)
where ²1 = 1 and ²i+1 = ²i− pi. The maximum aggregate throughput in OCS can be
obtained as
η(P∗) = φ
1(²1), (2.22)
where P∗ from the OCS approach is the combination of channel-hopping probabilities
acquired by the DP recursion in each channel. The allowable channel-hopping probabil-ity pi for each channel is quantized from 0 to 1 with quantized level ∆p. The selection
of ∆p is determined based on the quantization level in power as depicted in [28], which
will relate to the accuracy of the proposed OCS approach.
As indicated in [29], linear complexity of O(M · (1/∆p)2) that is proportional to
the number of channels M can be obtained by adopting the DP formulation in (2.21) and (2.22) for the proposed OCS approach. After off-line solving the OCS for different
numbers of CRPs, the proposed OCS scheme can consequently be recorded into a lookup table in order to acquire the optimal channel-hopping probability for N CRPs in real-time implementation. As a result, under the same ∆p, the DP scheme for
the proposed OCS approach will be computationally efficient in finding the optimal hopping probability compared to the brute force scheme with exponential complexity of O((1/∆p)M).
Chapter 3
Proposed Optimal
Channel-Hopping Sequence (OCS)
Approach under Generalized CR
Networks
The CR network with the CRUs in pairs for communication has been addressed in the previous section. However, the CRUs are not always transmitting in pairs since they may have data to be delivered to different CRUs in the network. In the generic scenarios, the CRUs can be classified into either the transmitting group when they have data to deliver or non-transmitting group when they have no data to transmit. The traffic of each CRU is assumed to be Bernoulli arrival with the probability λCR of one
frame arrival and the probability 1 − λCR of no frame arrival at the starting epochs as
in [26]. It is noted that no queue capacity is assumed for each CRU, and every CRU has equal probability in transmission with other CRUs.
channel-hopping sequence of their corresponding receivers to conduct channel negotiations and data transmission. On the other hand, for those CRUs in the non-transmitting group, they only need to follow their own channel-hopping sequence to hop between the chan-nels. However, there is a severe problem that arises in the generalized CR networks called the logic partition problem as stated in [13]. The CR transmitter cannot find its corresponding CR receiver because the receiver may also be in the transmitting group, which can severely degrade the CR network throughput. This type of situations fre-quently occur under the CR network with heavy traffic. In order to address the logic partition problem, the OCS approach for the generalized CR network will be presented and the associated analysis of aggregate throughput will be provided as in chapter 3.1. Furthermore, in the paired CR networks, the events of fail transmission for the CRPs are composed of the inter-collision among the CRPs and the collision between the PUs and the CRPs. However, due to the admission control and the utilization of larger contention window size in the CR network, the probability of inter-collision among the CRPs can be considered negligible. Therefore, it is unnecessary for all the CRPs to contend successively by adopting the DCF mode in IEEE 802.11 standard. As described in chapter 2.3, the two-way handshake process is utilized that the CRPs who sense the channel idle can start the contention process and will terminate the backoff counter while observing the other CRPs transmissions. However, this type of simple negotiation will not be sufficient for the generalized CR networks. The aggregate throughput for the CR network will be severely degraded if the CR transmitter does not hop to the same channel as its corresponding CR receiver, especially in heavy CR traffic networks. In order to further alleviate this problem for throughput enhancement, both the wake-up successive contention (WSC) and wake-up counter-reset successive contention (WCSC) algorithms are proposed to combine with the OCS approach in chapters 3.2 and 3.3.
3.1
Aggregate Throughput and Proposed OCS
Ap-proach
As was presented in chapter 2.1 for paired CR networks, the problem resulting from imperfect sensing will also be addressed in the generalized CR networks. The average detection probability PD,i and the average false alarm probability PF,i for the CRUs
as stated in (2.2a) and (2.2b) respectively will be recomputed under the generalized CR networks, which are denoted as ˜PD,i and ˜PF,i. The main feature of the generalized
CR networks is that there is comparably smaller probability for the transmitter and its corresponding receiver to have the same hopping sequences under either large number of channels or large number of CRUs. Therefore, assuming that all the CRUs are with the same sensing threshold pd, the average probability of detection ˜PD,ifor the CRUs in
the transmitting group hopping to channel i all with correct detection can be obtained as ˜ PD,i = N X n=0 N X k=0 n X y=0 µ N k ¶ pki(1 − pi)N −k µ n y ¶ µ k N − 1 ¶yµ 1 − k N − 1 ¶n−y · µ N n ¶ λn CR(1 − λCR)N −n· pyd ≈ N X n=0 n X y=0 µ n y ¶ pyi(1 − pi)n−y· µ N n ¶ λn CR(1 − λCR)N −n· pyd = N X n=0 n X y=0 Hn,y,iTN,npyd = [1 − λCR+ λCR(1 − pi+ pipd)]N, (3.1)
where TN,n represents the probability of n out of the N CRUs possess data for delivery
with the transmitting probability λCR as
TN,n= µ N n ¶ λn CR(1 − λCR)N −n. (3.2)
Noted that the approximation in the second equality of (3.1) is acquired based on the characteristics of binomial distribution with the most probability centering in the mean under small variance under large numbers of channels and CRUs. Similarly, the average probability of false alarm ˜PF,i for CRUs in the transmitting group hopping to channel
i all with false alarm can be obtained as
˜ PF,i ≈ N X n=0 n X y=0 Hn,y,iTN,npyf a = [1 − λCR+ λCR(1 − pi + pipf a)]N. (3.3)
Based on ˜PD,i in (3.1) and ˜PF,i in (3.3), the probability of channel availability for the
CRUs and the average frame delay for the PUs in the generalized CR network can also be derived similar to the analysis as presented in chapter 2.2, which are respectively denoted as ˜π0,i and ˜Di(pi).
Furthermore, the aggregate throughput for the generalized CR network will be com-puted. Unlike the situations in the paired CR networks, it is required to first obtain the
rendezvous probability pv,iin the generalized CR network which refers to the probability
for a CR transmitter to find its intended CR receivers in the same channel i. It indicates that a CR transmitter can have the chance to communicate with its corresponding CR receiver. Under the assumption of equal probability for the CR transmitters in choosing the receivers, the rendezvous probability pv,i can be obtained as
pv,i =
N − n
N − 1 +
yi− 1
with the total number of CRUs N > 1. The parameter n denotes the number of the CRUs in the transmitting group, and yi represents the number of CRUs in the
transmitting group that hop to the same channel i. The first term in (3.4) indicates the probability that the corresponding CR receiver of a CR transmitter exists in the non-transmitting group. On the other hand, the second term in (3.4) represents the probability that the corresponding CR receiver of a CR transmitter is in the transmit-ting group but hops to the same channel i as the CR transmitter. Noted that yi = 1
indicates only a single CR transmitter hopping to the ith channel. Similar to the deriva-tion in chapter 2.3, the throughput for channel i can be obtained by combining ˜π0,i and
pv,i in (3.4) as ˜ ηi(pi) ≈ 1 Ts ˜ π0,i(1 − λi) N X n=1 n X y=1 y X α=1
pv,iHn,y,iTN,nFy,αCα (3.5)
for N > 1, where Hn,y,i, Fy,α, and Cα are obtained from (2.3), (2.16), and (2.17),
respectively. Noted that the approximation in (3.5) is due to the binomial distribution that is assumed for acquiring TN,nas was obtained in (3.2). Consequently, the aggregate
throughput for the generalized CR networks with the probability distribution P can be acquired as ˜ η(P) ≈ M X i=1 ˜ ηi(pi) = 1 Ts M X i=1 ˜ π0,i(1 − λi) · NpiλCR(1 − pf a) W ¸ · W X β=1 · 1 + piλCR− λCR− piλCRβ(1 − pf a) W ¸ [Ts− (β − 1)δ − τ ] · · λCR µ 1 − βpi(1 − pf a) W ¶ + 1 − λCR ¸N −2 (3.6)
for N > 1. Intuitively, ˜η(P) = 0 for N = 1. Similar to the derivations as stated in
Detect the PU? Yes No Yes No No Yes Wake up
Detect the fail transmission?
!!!!!Fail transmission
Find the receiver in contention?
Successful transmission
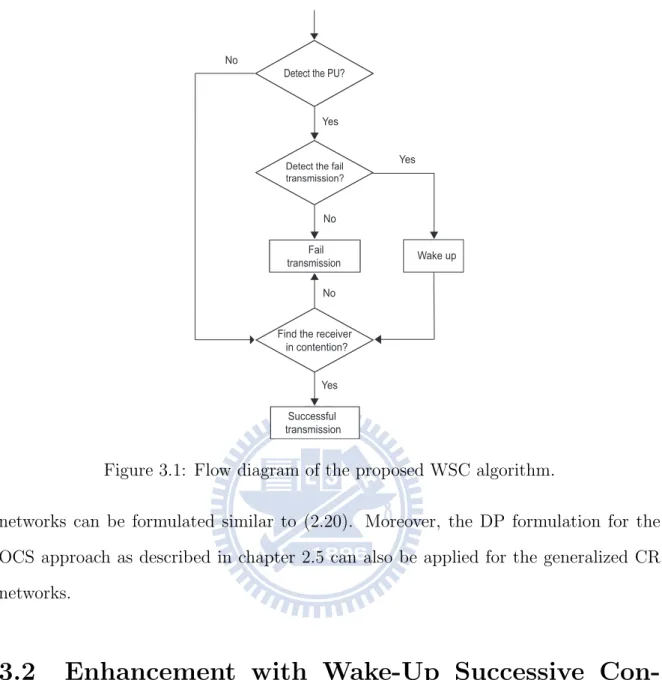
Figure 3.1: Flow diagram of the proposed WSC algorithm.
networks can be formulated similar to (2.20). Moreover, the DP formulation for the OCS approach as described in chapter 2.5 can also be applied for the generalized CR networks.
3.2
Enhancement with Wake-Up Successive
Con-tention (WSC) Algorithm
In order to provide higher efficiency for the generalized CR networks, the WSC scheme is proposed to increase the transmission opportunity for the contention mechanism. Fig. 3.1 shows the flow diagram of the proposed WSC algorithm independently in each CRU. First of all, the four-way handshake RTS/CTS/DATA/ACK as stated in
the original OCS approach, each CRU will contend the channel once only if its backoff counter reaches zero. In the WSC scheme, on the other hand, the CRUs will successively contending the channel until the end of the contention phase if other CRUs’ potential failed transmission has been observed. Noted that the failed transmission of a CRU is indicated by the time duration of a single RTS frame plus a short interframe space (SIFS), which represents that a corresponding CR receiver cannot correctly receive the RTS frame or the receiver hops to the other channels.
Furthermore, due to the probability of false alarm caused by imperfect sensing, some CRUs will mistakenly think there exists a PU in the channel while the PU is not actively transmitting data in the channel. The CRUs will remain in the silent state without conducting the channel contention process and negotiation with their corresponding CR receivers. There will exist comparably less CRUs in a channel that are actively contending the channel which decrease the transmission opportunities between the CRUs. Therefore, the wake-up mechanism in the proposed WSC scheme is designed to increase the number of CRUs in the contention phase by allowing all the CRUs who were blocked outside the channel to access into the contention phase while listening to the failed transmission of the other CRUs. Moreover, those wake-up CRUs will select their own backoff counters within the range of [0, W − 1]. It is noted that the CR transmitter that failed in its transmission will will successively not join the afterwards contention process. In summary, the WSC algorithm is formed by the the combination of four-way handshake, successive contention, and wake-up mechanism.
Detect the PU? Yes No Yes No Wake up
Detect the fail transmission? Fail transmission !!!Enter into contention phase !!! !!! back-off counter! !!!!!C!>!1@
Detect the fail ransmission?
Reset the back-off counter C
as rand() mod (W - Wpast)
Find the receiver in contention? !!!!Fail transmission! Successful transmission No Yes No Yes No Yes
3.3
Enhancement with Wake-Up Counter-Reset
Suc-cessive Contention (WCSC) Algorithm
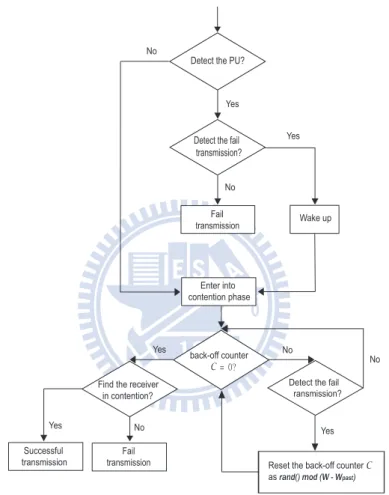
The proposed WCSC scheme is designed based on the WSC algorithm by modifying the wake-up mechanism in each CRU as illustrated in Fig. 3.2. In the generalized CR network, increased probability of successful transmissions is equivalent to increas-ing the number of negotiations between the CRUs. The proposed WCSC algorithm implemented in each CRU aims for increasing the number of negotiations between the CRUs. In WCSC algorithm, every time after the wake-up for channel contention, each CRU will rest its own backoff counter by randomly choosing a value in the range of
[Wp, W − 1]. The parameter Wp = dtp/δe represents the number of mini-slot for the
CRUs to encounter with the time tpast that passed-by in the contention phase. It can
be observed that there can be more CRUs that possess the opportunity for channel contention compared to that in the WSC scheme which utilize fixed interval of backoff window of [0, W − 1]. It is noted that there is no guarantee that the proposed WCSC algorithm will outperform the WSC scheme. The reason is that there can be more collision happened with larger number of CRUs in the channel compared to the WSC scheme. The performance of the proposed WSC and WCSC schemes will be incor-porated with the original OCS approach, i.e., denoted as OCS-WSC and OCS-WCSC schemes respectively, and will be evaluated in the performance evaluation chapter under the generalized CR networks.
Chapter 4
Performance Evaluation
In this chapter, theoretical analysis for the proposed OCS approach will be validated via simulations under both paired and generalized CR networks. The performance of the proposed OCS, OCS-WSC, and OCS-WCSC schemes will be evaluated and compared to the other conventional channel-hopping sequences. Moreover, for finding the sub-optimal solution of OCS, the discussion on the quantized level ∆pin the DP formulation
will also be provided.
4.1
Simulation Parameters
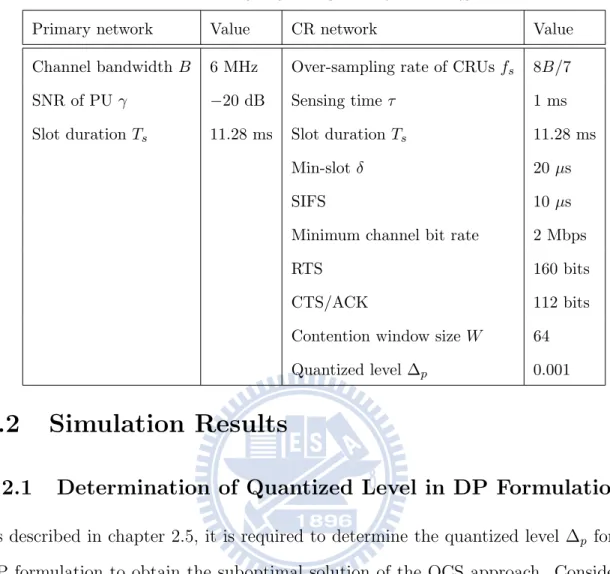
The simulation parameters for both the primary and CR networks are respectively listed in Table 1. Noted that the parameters are adopted from the IEEE 802.22 standard in [3; 4] for the CR network operating on TV bands; while that for the contention process are acquired from the IEEE 802.11 standard.
TABLE 1 : SIMULATION PARAMETERS
Primary network Value CR network Value
Channel bandwidth B 6 MHz Over-sampling rate of CRUs fs 8B/7
SNR of PU γ −20 dB Sensing time τ 1 ms
Slot duration Ts 11.28 ms Slot duration Ts 11.28 ms
Min-slot δ 20 µs
SIFS 10 µs
Minimum channel bit rate 2 Mbps
RTS 160 bits
CTS/ACK 112 bits
Contention window size W 64
Quantized level ∆p 0.001
4.2
Simulation Results
4.2.1
Determination of Quantized Level in DP Formulation
As described in chapter 2.5, it is required to determine the quantized level ∆p for the
DP formulation to obtain the suboptimal solution of the OCS approach. Considering various values of quantized level ∆p, Fig. 4.1(a) and 4.1(b) show the comparison for
the aggregate throughput of CRUs and the average frame delay of PU, respectively, with respect to different numbers of CRUs. The number of channels is equal to M = 4 where the PU’s arrival rate for each channel is λi = 0.1, 0.1, 0.3, 0.3 for i = 1, 2, 3, 4.
Two cases of arrival rates for the CRUs are considered as λCR = 0.4 and 0.8. The
analytical results are obtained for the aggregated throughput ˜η(P) and the aggregate
frame delay from chapter 3.1 under generalized CR networks with sensing threshold
pd = 0.93. The aggregate frame delay is the summation of average frame delay in each
0 10 20 30 40 50 60 70 80 90 0 0.5 1 1.5 Number of CRUs
Aggregate Throughput (slots)
Th λCR=0.8, ∆p=0.1 Th λCR=0.8, ∆p=0.05 Th λCR=0.8, ∆p=0.01 Th λCR=0.8, ∆p=0.001 Th λ CR=0.4, ∆p=0.1 Th λCR=0.4, ∆p=0.05 Th λCR=0.4, ∆p=0.01 Th λCR=0.4, ∆p=0.001
(a) Aggregate throughput of CRUs vs number of CRUs. 0 10 20 30 40 50 60 70 80 90 0 5 10 15 20 25 30 35 40 45 Number of CRUs
Aggregate Frame Delay (slots)
Th λCR=0.8, ∆p=0.1 Th λCR=0.8, ∆p=0.05 Th λCR=0.8, ∆p=0.01 Th λ CR=0.8, ∆p=0.001 Th λCR=0.4, ∆p=0.1 Th λCR=0.4, ∆p=0.05 Th λCR=0.4, ∆p=0.01 Th λCR=0.4, ∆p=0.001
(b) Aggregate frame delay of PUs vs number of CRUs.
Figure 4.1: Determination of quantized level ∆p with pd= 0.93 and number of channels
requirement in the primary system. Both ˜η(P) and ˜D are normalized with slot duration Ts for performance comparison.
It can be observed from both Fig. 4.1(a) and 4.1(b) that consistent suboptimal solution for the OCS approach can be achieved with the selection of smaller value of quantized level ∆p. However, the granularity of the quantized level ∆p will be
constrained by considering the hardware limitations and the computational complexity in the DP approach. Therefore, according to Fig. 4.1(a) and 4.1(b), the quantized level ∆p for searching the OCS is set as 0.001, which is accurate enough to obtain the
proposed OCS in the simulation settings with reasonable number of CRUs and channels. In the following sections, ∆p = 0.001 will be adopted for performance validation and
comparison.
4.2.2
Performance Validation and Comparison under Paired
CR Networks
4.2.2.1 Characterization of Channel-Hopping Probability for a Single Chan-nel
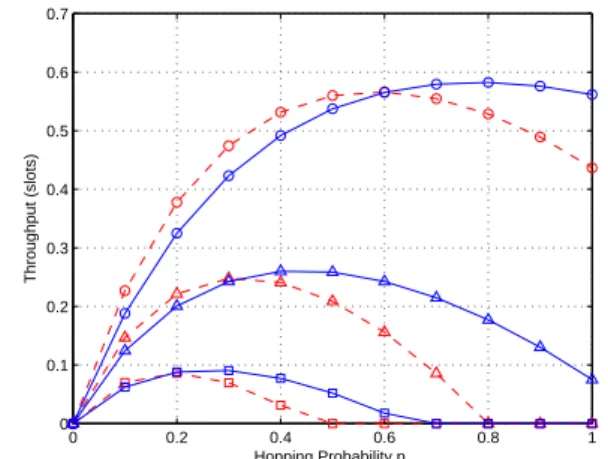
In this section, the channel-hopping probability will be characterized for the single channel case under the paired CR networks. Figs. 4.2(a) and 4.2(b) illustrate the throughput performance of CRPs and the average frame delay of the PU over different values of hopping probability pi, respectively. There are total of N = 14 CRPs with
sensing thresholds pd = 0.93 and 0.95 under PU’s arrival rate λi = 0.05, 0.2, and 0.4.
As shown in Fig. 4.2(a), the throughput performance will first increase with pi due to
the augmented number of CRPs that enlarges the channel utilization. However, the throughput of CRPs decreases with larger pi values owing to the insufficient channel
0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Hopping Probability p i Throughput (slots)
(a) Throughput vs channel-hopping probability.
0 0.2 0.4 0.6 0.8 1 0 2 4 6 8 10 12 14 16 18 20 Hopping Probability p i
Average Frame Delay (slots)
(b) Average frame delay vs channel-hopping proba-bility.
Figure 4.2: Performance of CRPs for a single channel with pd= 0.93 (dashed line) and
pd = 0.95 (solid line) under PU’s arrival rate λi = 0.05, 0.2, and 0.4 denoted by ◦, M,
enhanced throughput under larger value of pi since there will exist additional CRPs to
utilize the channels. On the other hand, with smaller value of pi, smaller pd = 0.93
results in smaller pf a which can allow the CRPs to quickly discover the idle slots and
consequently increase the channel utilization.
Fig. 4.2(b) shows that the average frame delay is an increasing function of pi which
can become significantly large with increased value of pi, i.e., the primary queue can
go unstable especially for large PU’s arrival probability λi and small sensing threshold
pd. It can be explained that with the larger pi indicates that more CRPs will hop
into the ith channel according to HN,n,i as shown in (2.3). Therefore, the transmitted
frames from those CRPs will produce more collisions with the PU’s frame which makes the increased time in retransmission and therein the larger average frame delay in the primary network. With smaller detection probability pd, more collisions from the CRPs
to the PU can be observed. Furthermore, with larger value of λi, it is intuitive that the
long waiting line in the queue will also increase the average frame delay. 4.2.2.2 Performance Validation and Comparison
Two conventional channel-hopping sequences are simulated for comparison purpose as follows: (a) uniform channel-hopping sequence (UCS) with the probability pi = 1/M
for i = 1, 2, ..., M , and (b) proportional hopping sequence (PCS) with channel-hopping probabilities proportioning to the complement of λi/µ, where µ represents
the service rate. The PCS scheme is designed according to the situation that smaller frame arrival probability is assumed to result in larger channel availability, which can be written as pi = 1 −λi µ PM i=1(1 −λµi) , i = 1, 2, ..., M. (4.1)
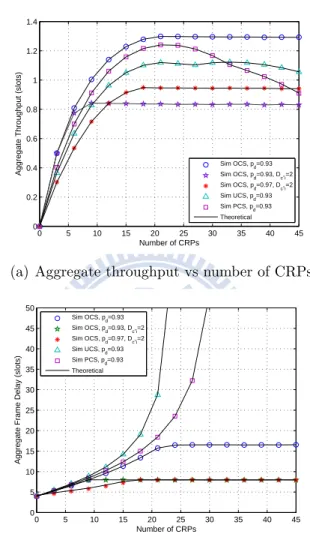
0 5 10 15 20 25 30 35 40 45 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Number of CRPs
Aggregate Throughput (slots)
Sim OCS, pd=0.93 Sim OCS, pd=0.93, Dc,i=2 Sim OCS, p d=0.97, Dc,i=2 Sim UCS, pd=0.93 Sim PCS, pd=0.93 Theoretical
(a) Aggregate throughput vs number of CRPs.
0 5 10 15 20 25 30 35 40 45 0 5 10 15 20 25 30 35 40 45 50 Number of CRPs
Aggregate Frame Delay (slots)
Sim OCS, pd=0.93 Sim OCS, p d=0.93, Dc,i=2 Sim OCS, pd=0.97, Dc,i=2 Sim UCS, pd=0.93 Sim PCS, p d=0.93 Theoretical
(b) Aggregate frame delay vs number of CRPs.
Figure 4.3: Performance Comparison under pd = 0.93 and number of channels M = 4
It is noted that the service rate is selected as µ = 1 frame/slot which is the stationary idle probability under no collision between the CR and primary network. For validation purpose, it can be seen from both Figs. 4.3(a) and 4.3(b) that the simulation results can match with the analytical results for all the three approaches. Fig. 4.3(a) shows that the proposed OCS can provide higher aggregate throughput compared to the other channel-hopping sequences since it can exactly exploit the potential throughput in multiple channels. It is interesting to note that the aggregate throughput in OCS will saturate after exceeding a certain number of CRPs while the number of the CRPs is large enough to utilize each channel with optimal throughput. In general, the design concept arises from assigning additional CRPs into the virtual channel in order to reduce collision with the PU.
On the other hand, as show in Fig. 4.3(b), the aggregate frame delay of primary network can also be guaranteed by adopting the proposed OCS approach. As a result, even though the delay constraints is not taken into consideration, the OCS still can ensure the QoS requirement of the PUs to a certain level. In order to provide tighter QoS requirement for the PUs, the case with constraints Dc,i = 2 for i = 1, 2, 3, 4 are
also shown in both Figs. 4.3(a) and 4.3(b). The effect with delay constraint Dc,i = 2
can be observed with lowered aggregate frame delay of PUs and consequently lowered aggregated throughput of CRPs. With different sensing thresholds pd, the large pd
will have enhanced aggregate throughput than the small pd case since the number of
CRPs is large enough to exploit channel availability. On the other hand, smaller pd
results in smaller pf a which can provide the CRP to quickly discover the idle slots and
consequently increase the channel utilization over the large pd which blocks the CRPs’
access into the channel which makes the channel utilization in (2.17) down when the number of CRPs is small.
first, which can be explained that PCS puts more CRUs into good channels (i.e., with lower arrival probabilities) than UCS, but when too many CRUs are in the good chan-nels, the aggregate throughput will degrade more quickly than UCS due to too much collision in the good channels. On the other hand, in Fig. 4.3(b), UCS will make the primary system unstable quickly due to too much CRUs allocated to the bad channels (i.e., with large arrival probabilities) at first. As a result, the merits of adopting the OCS approach under the paired CR networks can be observed.
4.2.3
Performance Validation and Comparison under
Gener-alized CR Networks
4.2.3.1 Performance Validation of Proposed OCS Approach
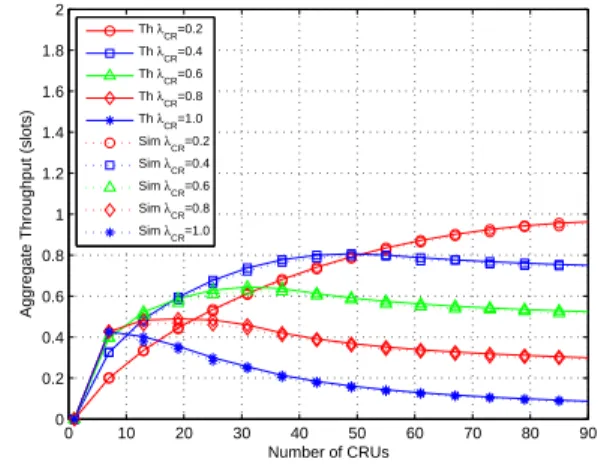
Figs. 4.4(a) and 4.4(b) shows the performance validation between simulation and an-alytical results by adopting the proposed OCS scheme under the generalized CR net-works. Considering different arrival rates λCR of the CRUs, the sensing threshold is
selected as pd = 0.93 and the number of channels is M = 4 with PU’s arrival rate at
each channel as λi = 0.1, 0.1, 0.3, 0.3 for i = 1, 2, 3, 4. It can be observed from both
figures that the analytical results can match with the simulation results under all the different cases. As in Fig. 4.4(a), the aggregate throughput increases with the number of CRUs and decrease at higher numbers of CRUs due to the insufficient channel avail-ability. Lowered aggregate throughput is observed at high CR traffic, e.g., at λCR = 1,
due to the decreasing rendezvous probability pv,i. The CR transmitters do not have
much chance to meet with their corresponding CR receivers since those receivers may also conduct data transmission in another channel. Therefore, from the aggregate frame delay in the primary network as in Fig. 4.4(b), the delay will increase with the aug-mentation of the CR traffic. Under the same CR traffic, delay only slightly change
0 10 20 30 40 50 60 70 80 90 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 Number of CRUs
Aggregate Throughput (slots)
Th λCR=0.2 Th λ CR=0.4 Th λCR=0.6 Th λCR=0.8 Th λCR=1.0 Sim λCR=0.2 Sim λ CR=0.4 Sim λCR=0.6 Sim λCR=0.8 Sim λCR=1.0
(a) Aggregate throughput vs number of CRUs.
0 10 20 30 40 50 60 70 80 90 0 10 20 30 40 50 60 Numer of CRUs
Aggregate Frame Delay (slots)
Th λ CR=0.2 Th λCR=0.4 Th λCR=0.6 Th λCR=0.8 Th λCR=1.0 Sim λ CR=0.2 Sim λCR=0.4 Sim λCR=0.6 Sim λCR=0.8 Sim λCR=1.0
(b) Aggregate frame delay vs number of CRPs.
Figure 4.4: Performance validation of OCS scheme under pd = 0.93 and number of
channels M = 4 with PU’s arrival rate at each channel as λi = 0.1, 0.1, 0.3, 0.3 for
after exceed some number of CRUs, which means that there is no use in putting the CRUs into channels except virtual channel due to the decrease in channel availability. In other words, under the same CR traffic, OCS decreases the channel availability for probability of rendezvous before reaching the number of CRUs which makes the best trade-off between channel availability and probability of rendezvous. After that, the aggregate throughput will degrade caused by the decreasing probability of rendezvous because there is no gain from putting more CRUs into channels except virtual channel. As for the light traffic, CRUs can’t utilize the channel very well with the small num-ber of CRUs in transmitting group at first. However, after the numnum-ber of CRUs is large enough to explore the channel availability, the aggregate throughput in light traffic will transcend any other heavy traffic scenarios. Therefore, from the discussion in gener-alized condition with OCS, the logic partition problem accounts for the degradation in aggregate throughput especially in heavy traffic CR network. Moreover, under the light CR traffic, it will have better approximation between simulation and theoretical results, because the small channel-hopping probability resulted from high rendezvous rate will lead to small variance in binomial distribution in approximation.
4.2.3.2 Performance Comparison
As for the generalized CR network, Fig. 4.5 shows the aggregate throughput of CRUs and its corresponding delay of PU in Fig. 4.6. As can be seen, light traffic with high rate of rendezvous, thus, the OCS will work well by allocating the few CR transmitters into better channel to increase the channel utilization. When the CR traffic is getting high as 0.4, there is no much difference between these three selection methods because the number of CR transmitters and rate of rendezvous are just proper to explore the channel utilization. While the CR traffic is as high as 0.7, OCS can work well again compared to other selection methods due to the low rate of rendezvous in this scenario.
10 20 30 40 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 λCR=0.1 Number of CRUs
Aggregate Throughput (slots)
10 20 30 40 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 λCR=0.4 Number of CRUs 10 20 30 40 0.3 0.35 0.4 0.45 0.5 0.55 0.6 λCR=0.7 Number of CRUs th OCS th UCS th PCS
Figure 4.5: Aggregate throughput of CRUs under different channel-hopping sequences with pd = 0.93 and number of channels M = 4 (each channel has arrival rate λi =
0.1, 0.1, 0.3, 0.3 for i = 1, 2, 3, 4). 10 20 30 40 4.4 4.6 4.8 5 5.2 5.4 5.6 5.8 6 λCR=0.1 Number of CRUs
Aggregate Frame Delay (slots)
10 20 30 40 5 6 7 8 9 10 11 12 13 λCR=0.4 Number of CRUs 10 20 30 40 5 10 15 20 25 30 35 40 λCR=0.7 Number of CRUs Th OCS Th UCS Th PCS
Figure 4.6: Aggregate frame delay of PUs under different channel-hopping sequence with pd = 0.93 and number of channels M = 4 (each channel has arrival rate λi =
0 20 40 60 80 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Number of CRUs
Aggregate Throughput (slots)
0 20 40 60 80 0 5 10 15 20 25 30 Number of CRUs
Aggregate Frame Delay (slots)
Figure 4.7: Simulation for Comparison between proposed algorithms in pd = 0.93 and
W = 64 with λCR = 1 (dashed) and λCR = 0.6 (solid) under OCS, OCS-WSC and
OCS-WCSC (M, ◦, and ¤ curves, respectively) and number of channels M = 4 (each channel has arrival rate λi = 0.1, 0.1, 0.3, 0.3 for i = 1, 2, 3, 4).
In other words, OCS can allocate the CRUs to gather to some channels to increase the rate of rendezvous. As for aggregate frame delay of PUs, the percentage in difference in delay between these three methods is still consistent to the result as in aggregate throughput.
4.2.3.3 Enhancement with WSC and WCSC Mechanisms
In Fig. 4.7, 4.8, and 4.9, the comparison between OCS, OCS-WSC, and OCS-WCSC are provided w.r.t. different system parameters in generalized CR network such as the probability of detection pd and contention window size W . It is noted that although
there should be a regulation for pd in QoS of delay prescribed by the primary network
in [23; 26], Pd can still be determined by the CRUs themselves due to the control in
hopping sequence. In other words, the QoS in primary network can be promised by the admission control in CRUs.