行政院國家科學委員會專題研究計畫 成果報告
具人機互動能力之自走式仿人類眼球運動機器人
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 98-2221-E-009-128- 執 行 期 間 : 98 年 08 月 01 日至 99 年 07 月 31 日 執 行 單 位 : 國立交通大學電機與控制工程學系(所) 計 畫 主 持 人 : 陳永平 計畫參與人員: 碩士班研究生-兼任助理人員:劉澤翰 碩士班研究生-兼任助理人員:白文榜 碩士班研究生-兼任助理人員:黃文俊 博士班研究生-兼任助理人員:楊世宏 公 開 資 訊 : 本計畫可公開查詢中 華 民 國 99 年 10 月 31 日
行政院國家科學委員會專題研究計畫成果報告
行政院國家科學委員會專題研究計畫成果報告
行政院國家科學委員會專題研究計畫成果報告
行政院國家科學委員會專題研究計畫成果報告
具人機互動能力之自走式仿人類眼球運動機器人
具人機互動能力之自走式仿人類眼球運動機器人
具人機互動能力之自走式仿人類眼球運動機器人
具人機互動能力之自走式仿人類眼球運動機器人
計畫編號:NSC 98-2221-E-009-128-
執行期限:98 年 8 月 1 日至 99 年 7 月 31 日
主持人:陳永平
國立交通大學電控工程研究所
共同主持人:
計畫參與人員:楊世宏、黃文俊、白文榜、劉澤翰
國立交通大學電控工程研究所
中文摘要 中文摘要中文摘要 中文摘要 本計劃嘗試結合仿人類眼球運動機器 人以及自走車,成為自走式仿人眼機器 人,設計智慧型法則,以視覺為基礎執行 人機互動。本計劃已完成智慧型手勢辨識 系統設計以及智慧型多軸追蹤控制,其中 手勢辨識系統根據人腦所認知手姿態狀態 來識別不同的手勢,總共有九種手勢可被 此系統描述。而多軸追蹤控制利用倒傳遞 演算學習法則的離線學習來訓練控制器, 以學習目標位置與對應速度之間的關係, 經由實驗證明確實可成功地完成物體的定 點追蹤控制和水平追蹤控制。 關鍵詞 關鍵詞關鍵詞 關鍵詞:仿人眼機器人、手勢辨識、追蹤 控制 AbstractThis project proposes a mobile humanoid eye robot, or MHER for simplicity, constructed from combining a humanoid eye-ball robot and a mobile robot. The MHER is designed to interact with human based on vision processing and intelligent algorithm. This project has developed an intelligent hand gesture recognition system and an intelligent multiaxial tracking control. The hand gesture recognition system can recognize nine hand gestures according to cognitive posture states of human brain. Furthermore, the neural networks learn the relationship of object position and corresponding velocity by the
The success of the set-point control and the horizontal trajectory tracking control of the MHER can be concluded from the experiment results.
Keywords: eye robot, hand gesture
recognition, tracking control
I. I. I.
I. Motivation and GoalMotivation and GoalMotivation and Goal Motivation and Goal
The field of human-robot interaction with a robot is a major challenge. Using hand gestures is a natural way for interaction between people. Hand detection and hand gesture recognition could be essential to human-robot interaction. Considering the global hand pose and each finger joint, the human hand motion has roughly 27 degrees of freedom (DOFs) [1]. This project makes the image processing easier for the vision-based hand gesture recognition. The color-based algorithm is implemented to meet the real-time performance, accuracy and robustness requirements. In recent years, many researchers have been devoted to developing artificial intelligence system for high-level vision [2], representation, and reasoning [3]. In general, the spatial temporal reasoning adopts the concept of state machine to describe a hand gesture represented by a specified state sequence. However, it is not intelligent to design a state machine manually. In order to solve above problems, this project proposes a system combined recurrent neural network and spatial temporal reasoning together.
image processing are important researches owing to their wide varieties of application. Among all of these applications, visual tracking has become a great interest in this domain. The speed of capturing an image must be as fast as possible to detect the movement of the object in real-time. However, the camera has a constraint on the number of capturing image per second. The purpose of this project is to deal with this problem and implement the visual servo control system. This project introduces an efficient approach of a real-time moving object tracking by the two eyes of the MHER and describes the design of an algorithm based on the neural network structure.
II. Hardware
The MHER tracking system is built with two cameras and five motors to emulate human eyeballs as shown in Fig. 1. The MHER adopts five FAULHABER DC servomotors to steer the MHER in tracking system. With RS-232 interface, the controller of DCservomotors is executed by the motion control card, MCDC 3006S, in a positioning resolution of 0.18°. Therefore, the MHER has two pan-direction video cameras, a conjugated tilt motor and a pan-tilt neck. The range of pan is approximately 120 degrees, and tilt is approximately 60 degrees. The size of the head is about 25 cm width and 10 cm height for the eye part.
III. Intelligent Hand Gesture Recognition
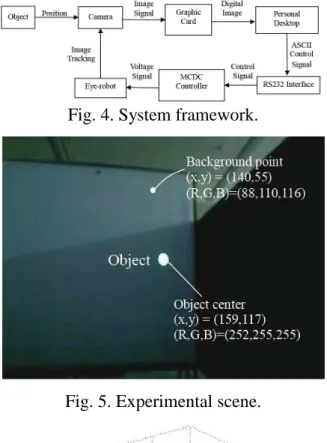
The system structure of the proposed hand gesture recognition system [4] includes image data retriever, posture data generator, posture state encoder, and gesture analyzer. The main goal of the proposed hand gesture recognition system is to recognize hand gestures captured by a CCD camera. This project will focus on nine gestures, named upward, downward, turn left, turn right, left around, right around, follow, learning and warming as shown in Fig. 2.
Fig. 1. HMER.
Fig. 2. Hand gestures.
To describe a hand gesture by a posture state sequence, it is often based on a fixed-length sequence of posture states. However, a hand gesture usually happens during an uncertain time; for example one hand posture can change to another hand posture quickly or slowly and thus it is difficult to represent a hand gesture by a fixed-length state sequence. To solve this problem, the hand gesture analyzer contains a trigger net and a gesture classifier, developed to learn a posture state sequence unfixed length. The single state eliminator and the repeated state processor are implemented by the feedforward neural network, while the trigger net is implemented by the recurrent neural network.
There are two kinds of clock mode, synchronous and asynchronous, used in this gesture recognition system. If repeated state retriever is applied for feed-forward classifier, then the gesture recognition system adopts synchronous clock mode for recurrent classifier; otherwise, it adopts asynchronous clock mode.
Fig. 3. Recurrent classifier. Table I. Performance comparison.
In synchronous clock mode, the output of feed-forward classifier will be processed according to each coming clock. In asynchronous clock mode, however, the output of recurrent classifier shown in Fig. 3 will be processed according to the output of trigger net which is shifted down.
The hand gestures can be recognized by the gesture classifier according to different triggered state sequences by the recurrent neural network. As a result, the performance comparison between feedforward and recurrent neural network is shown in Table I.
The experimental results show that this structure can achieve satisfactory real-time performance and high classification accuracy. The proposed intelligent hand gesture recognition system contained several advantages described below. Another application of the hand gesture can be implemented by increasing hand posture states. There is no limit of length of state sequence for a recognized hand gesture (trigger net). This system would not be influenced by undefined hand gesture (recurrent classifier).
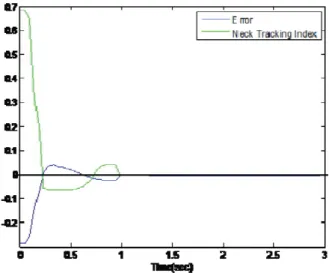
Fig. 4. System framework.
Fig. 5. Experimental scene.
Fig. 6. Intensity of gray level distribution.
Fig. 7. Neck control training patterns.
IV. Intelligent Multiaxial Tracking Control
The tracking control system shown in Fig. 4 is the main part of this project. The Eye-robot tracking control is based on neural network by the off-line training [5] . There are four neural networks used in this project, including NNneck, NNeye, NNeye1-neck, and NNeye2-neck.
Fig. 8. Set-point control of the neck. The object tracked by the Eye-robot is projected by an overhead projector in a screen. The speed of the object motion velocity is 28 cm/sec. The distance between the Eye-robot and screen is set as 240 cm and the proportion of the vision object in the Eye-robot is designed as 10cm x 10cm shown in Fig. 5.
To detect the object on the screen, the image of the left-eye camera is first transformed into a gray level image with gray level intensity distribution shown in Fig. 6. Then the object can be extracted.
The neural-network-based controller is achieved via offline training. The input of the neural network is the object center p and the output is the tracking index V related to the driving voltage of the Eye-robot. The neural network controller receives the error e between the current horizontal position xc and the desired position xd of the target and provides a tracking index V to drive the Eye-robot. The neural network controller design will emphasize on the training pattern
driving the Eye-robot to trace the object. With the patterns shown in Fig. 7, the human visual motion can be mimicked. The left eye is selected as the dominant eye in this project and is designed to have the ability to find the object in searching mode. Once the object is detected, the eyes and the neck will work together to trace the object. It is clear that the tracking motion is mainly executed by the neck when the object appears at the position far away the vision center xc, while the dominant eye and right eye play the roles of concentration on the object.
After the offline training, the trained NN will be applied to the Eye-robot tracking, i.e., the object is kept in the image center. During the object tracking, the maximal velocity of the neck is set to be vmax=1500rpm/min. It is clear from Fig. 8 that the motors employed to steer the two cameras have also reached the control goal to locate the object around the visual center with an error near to zero.
Reference:
[1] Y. Wu and T. S. Huang, “Hand modeling analysis and recognition for vision-based human computer interaction,” IEEE Signal Process
Mag.—Special Issue on Immersive Interactive Technology, vol. 18, no. 3, pp. 51–60, 2001.
[2] N. Badler, “Temporal Scene Analysis - Conceptual Descriptions of Object Movements,”
Report TR 80, 1975.
[3] R. Brooks, “Symbolic reasoning among 3D models and 2D images,” Artificial Intelligence, pp. 285-348, 1981.
[4] 洪新光,智慧型手勢辨識系統設計,交通大學 碩士論文,2009。
[5] 徐傳源,應用於眼球機器人之智慧型多軸追蹤 控制,交通大學碩士論文,2010。
附件:封面格式
行政院國家科學委員會補助專題研究計畫成果報告
行政院國家科學委員會補助專題研究計畫成果報告
行政院國家科學委員會補助專題研究計畫成果報告
行政院國家科學委員會補助專題研究計畫成果報告
※※※※※※※※※※※※※※※※※※※※※※※※※※
※ ※
※ 具人機互動能力之自走式仿人類眼球運動機器人 ※
※ ※
※※※※※※※※※※※※※※※※※※※※※※※※※※
計畫類別:■個別型計畫 □整合型計畫
計畫編號:NSC 98-2221-E-009-128-
執行期間:98 年 8 月 1 日至 99 年 7 月 31 日
計畫主持人:陳永平
共同主持人:
計畫參與人員:楊世宏、梁瑋哲、徐傳源、黃文俊、白文榜、劉澤翰
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:國立交通大學電控工程研究所
中 華 民 國 99 年 10 月 15 日
98 年度專題研究計畫研究成果彙整表
計畫主持人:陳永平 計畫編號: 98-2221-E-009-128-計畫名稱:具人機互動能力之自走式仿人類眼球運動機器人 量化 成果項目 實際已達成 數(被接受 或已發表) 預期總達成 數(含實際已 達成數) 本計畫實 際貢獻百 分比 單位 備 註(質 化 說 明:如 數 個 計 畫 共 同 成 果、成 果 列 為 該 期 刊 之 封 面 故 事 ... 等) 期刊論文 0 0 100% 研究報告/技術報告 0 0 100% 研討會論文 1 1 100% 篇 National Computer Symposium: Workshop on ICM 論文著作 專書 0 0 100% 申請中件數 0 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 3 3 100% 博士生 1 1 100% 博士後研究員 0 0 100% 國內 參與計畫人力 (本國籍) 專任助理 0 0 100% 人次 期刊論文 0 0 100% 研究報告/技術報告 0 0 100% 研討會論文 1 1 100% 篇 36th Annual Conference of the IEEE Industrial Electronics Society 論文著作 專書 0 0 100% 章/本 申請中件數 0 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 0 0 100% 博士生 0 0 100% 博士後研究員 0 0 100% 國外 參與計畫人力 (外國籍) 專任助理 0 0 100% 人次其他成果