行政院國家科學委員會專題研究計畫成果報告
一類 neutr al 系統強韌控制之研究
Robust Contr ol for a Class of Neutr al Systems
計畫編號:NSC
90-2213-E-110-056-執行期限:90 年 8 月 1 日至 91 年 7 月 31 日
主持人:謝哲光
國立中山大學電機工程學系
一、中文摘要 本報告提出使一類不確定 neutral 系統全 域均勻漸進穩定之與時間延遲有關的可穩 定性判則,並舉例說明我們的主要結果。 關鍵詞:Neutral 系統、強韌控制、時間延 遲 Abstr actThis report provides some delay– dependent stabilizability criteria for global uniform asymptotic stabilizability for a class of uncertain neutral systems. A numerical example is given to illustrate our main results.
Keywor ds:Neutral Systems, Robust Control,
Time Delay
二、緣由與目的
Time delay phenomenon is often encountered in various engineering systems, such as AIDS epidemic, aircraft stabilization, chemical engineering systems, control of epidemics, inferred grinding model, manual control, microwave oscillator, nuclear reactor, population dynamic model, rolling mill, ship stabilization, and systems with lossless transmission lines [5-6]. It is frequently a source of instability and a source of generation of oscillation in many systems; for example, the trivial solution of
( )
t x( )
t x( )
t x& +2& =−is asymptotically stable, but that of neutral system
( )
t x(
t)
x( )
t x& +2& −τ =−is unstable for any positive delay τ [6]. Consequently, the problem of stability analysis and stabilization for systems with
time delay have been a main concern of the researchers; see, for example, [1]-[13]. Depending on whether the stabilizability criterion itself contains the delay argument as a parameter, stabilizability criteria for systems with time delay can be classified into two categories, namely delay-independent criteria and delay-dependent criteria. Generally speaking, the former ones are more conservative than the latter ones. There have been a number of interesting developments in searching the stabilizability criteria for time-delay systems, but most were restricted to searching delay-independent and delay-dependent criteria for asymptotic stabilization of retarded systems; see, for example, [1, 7, 10, 13]. For searching the delay-independent criteria for asymptotic stabilization of neutral systems; see, for example, [8]. It is the purpose of this report to consider delay-dependent criteria for asymptotic stabilizability for a class of uncertain neutral systems.
三、結果與討論 3.1 Notation
n
ℜ := n -dimensional real space. n
m×
ℜ := Set of all real m by n matrices.
0
C := Set of all continuous functions from
[
−H,0]
to ℜn.T
A (resp. xT):= Transpose of matrix A
(resp., vector x).
A := Spectral norm of matrix A. x := Euclidean norm of vector x.
0
>
P := P is a positive definite symmetric matrix.
Q
P < := Q−P is a positive definite symmetric matrix.
I := Unit matrix.
∀ := Means "for every."
3.2 Pr oblem For mulation and Main Results
Consider the following uncertain neutral system:
( )
t Ax( )
t Bx(
t H)
Cx(
t H)
Du( )
t x& = + − + & − +( ) (
)
(
t,xt ,xt H)
, f − ∆ + t ≥0, (1a)( ) ( )
t t , x =φ t∈[
−H,0]
, (1b) where H ≥0 is the time delay, x∈ℜn ,m
u∈ℜ is the input, A, B, C∈ℜn×n, and m
n
D∈ℜ × are known matrices, the uncertainty ∆f
( )
⋅ is a smooth vector-valued function, and φ∈C0 is the initial function.The following assumptions are made on system (1) throughout this report.
A1) The pair
(
A+B,D)
is stabilizable. A2) There are two nonnegative constantsa0 and a1 such that, for all
arguments,
(
)
2 1 1 2 0 0 2 1 0, ,z z a z a z t f ≤ ⋅ + ⋅ ∆ . Remar k 1 If H =0 , C=0 , and ∆f =0 , then system (1) is reduced to a linear delay-free system x&( ) (
t = A+B) ( )
xt +Du( )
t . The assumption A1) assures the stabilizability of this linear delay-free system.Define , 0 , 0 , 1 , 0 ≠ = = C if C if m (2a) and . 0 , 0 , 1 , 0 1 0 1 0 ≠ = = = a or a if a a if σ (2b) By (2), we have m2 =m , σ2 =σ , C C m⋅ = , and σ ⋅∆f =∆f .
Since the pair
(
A+B,D)
is assumed to be stabilizable, we can choose a constant matrix K∈ℜm×n such thatDK B A
Aˆ= + − is Hurwitz and the following Lyapunov equation
(
) (
)
[
q m m a a]
I A P P AˆT + ˆ=− + + 1+ ⋅ 0 + 1 ⋅ (3) has a unique solution P>0 for any constant0
>
q .
Lemma 1 [2]
For any matrices B, C∈ℜn×n , the operator D:C0 →ℜn defined by
( )
t B x( )
s ds Cx(
t H)
x Dx t H t t = +∫
− + − ,is stable provided that 1
<
+ C
B
H ,
where x is the state at time t defined byt
( ) ( )
s : xt s ,xt = + ∀s∈
[
−H,0]
.Now we present a delay-dependent criterion for asymptotic stabilizability of system (1).
Theor em 1
System (1) satisfying A1)~A2) is asymptotically stabilizable by a linear control provided that
(a) H B + C <1;
(b) There exist numbers ξ ≥0 and q>0 such that
(
)
[
a a I B PRPB]
H P PRPC CT + + + 0+ 1 + T 2 1 σ[
q⋅I+ ⋅PDDTP]
< 2ξ , (4) where R= A~A~T +σ ⋅I, A~= Aˆ−ξDTP, and P >0 is the solution of Lyapunov equation (3). In this case, a suitable stabilizing linear control is given by( )
t(
K D P)
x( )
t u =− +ξ T. (5)
Pr oof of Theor em 1
System (1) with linear control (5) can be written in the following form:
( )
t B x( )
sds Cx(
t H)
Ax( )
t f x dt d t H t = +∆ +∫
− − − ~ , (6a)( ) ( )
t t , x =φ t∈[
−H,0]
, (6b) where ∆f denotes ∆f(
t,x( ) (
t ,xt−H)
)
. The functional given by( )
xt V( )
xt V( )
xt V( )
xt V = 1 + 2 + 3 , (7a) where( ) ( )
( )
t T t t g x Pg x x V1 = ,( ) ( )
x xt B x( )
sds Cx(
t H)
g t H t t = +∫
− − − , (7b)( )
=∫ ∫
−0 +( )
2 H t s t t M d ds x V θ θ ,( )
~( )
2( )
2 θ σ θ θ A PBx PBx M = T + ⋅ , (7c)( )
=∫
t−( ) ( )
H t T t x s Wxs ds x V3 ,(
H m)
I C PRPC aW = 1⋅1+ + + T , (7d) is a legitimate Lyapunov functional candidate [3]. The time derivatives of Vi
( )
xt ,3 , 2 , 1 =
i , along the trajectories of system (6) satisfy
( )
[
Axt f]
Pg( ) ( )
x g x P[
Ax( )
t f]
V&1= ~ +∆ T t + t T ~ +∆( )
t(
A P PA PDD P)
x( )
t x T ˆT + ˆ−2ξ T =( )
( )
(
)
− − +∫
− xs ds Cxt H B P A t x t H t T T ~ 2( )
( )
(
)
+ − − ∆ +∫
− xs ds Cxt H B t x P f t H t T 2( )
t(
A P PA PDD P)
x( )
t x T T + − ⋅ T ≤ ˆ ˆ 2ξ( )
2( )
2 ~ t x H ds s PBx A t H t T + ⋅ +∫
−(
)
2( )
2 ~ t x m H t PCx AT − + ⋅ +(
)
(
( )
(
)
2)
1 2 0 1+H+m ⋅ a xt +a xt−H +( )
( )
(
)
+ + − +∫
− 2 2 2 H t PCx ds s PBx t Px t H t σ ,( )
t M( )
sds M H V t H t∫
− − ⋅ = 2 & ,( )
t Wx( ) (
t xt H)
Wx(
t H)
x V&3 = T − − T − .Hence the derivative of V
( )
xt is given by( )
t[
A P PA PDD P x V& ≤ T ˆT + ˆ−2ξ⋅ T(
) (
)
(
m+ +m ⋅ a +a)
⋅I]
x( )
t + 1 0 1( )
t[
C P(
AA I)
PC P]
x( )
t x T T ~~T + ⋅ + ⋅ 2 + σ σ( ) (
t[
a a)
I B P(
I AA)
PB]
x( )
t Hx T 1+ 0+ 1 + T +~~T + σ . (8) By (3), (4), and (8), there exists a constant0 > ν such that
( )
( )
2 t x x V& t ≤−ν ⋅ . (9) Thus, by condition (a), Lemma 1, and [3, Theorem 9.8.1] with (7) and (9), we conclude that system (6) (i.e. system (1) with (5)) is asymptotically stable.Example 1
Consider the following uncertain neutral system with time delay described as
(
t H)
Cx(
t H)
Bx t Ax t x&( )= ( )+ − + & −( )
t f(
t,x( ) (
t ,xt H)
)
, Du +∆ − + t≥0, (10a)( ) ( )
t t , x =φ t∈[
−H,0]
, (10b) where , 2 5 6 1 = A , 1 . 0 0 0 1 . 0 − = B , 1 . 0 1 . 0 0 1 . 0 − − = C , 2 2 = D( )
(
( )
) ( )
( ) (
)
− ⋅ ⋅ ⋅ = ∆ H t x t b t x t x t a f 2 1 2 cos , (10c) 2 ℜ ∈ x , H =0.4, and( ) ( )
, 0.9 9 . 0 ≤ ≤ − a t bt , ∀t≥0.The comparison of (1)-(2) and A2) with (10), we have a0 =a1 =0.81 and m=σ =1.
Since C +H B =0.1918<1, the integral system
( )
+∫
( )
−(
−)
=0 − H t Cx ds s x B t x t H tis uniformly asymptotically stable.
It is easy to show that the pair
(
A+B,D)
is stabilizable. Suppose we choose
[
2.5 3]
=
K and q=2 such that
− − = 9 . 3 0 0 1 . 4 ˆ A
is Hurwitz, then solving the Lyapunov equation (3), we have = 8 . 0 0 0 76 . 0 P . Since we have = ⋅ + = 21 . 16 0 0 81 . 17 ˆ ˆ 1 AA I R T σ and
(
)
[
a a I B PRPB]
H P PC PR CT 0 1 T 1 2 1 +σ + 1+ + + I ⋅ < − − = 2 8332 . 1 1037 . 0 1037 . 0 8752 . 1 ,(4) with ξ =0 is satisfied. By Theorem 1, system (10) is asymptotically stabilizable by the linear control
( )
t[
]
x( )
t u =−2.5 3 .It is interesting to note that the pair
(
A,D)
is not completely controllable in this example, even if a
( ) ( )
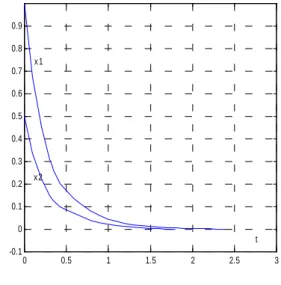
t =bt =0 or C=0, the control strategies in [1, 8, 13] cannot be used in this example.For simulation purposes, let us take
( )
t 0.9sin( )
t ,a = b
( )
t =0.9cos( )
t , ∀t ≥0, and initial function φ( )
t =[
1 0.5]
T ,[
−0.4,0]
∈
t , in system (10). The time responses of such a system are depicted in Fig. 1.
0 0.5 1 1.5 2 2.5 3 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 x 1 x 2 t
Fig. 1 Time responses of system (10).
四、計畫成果自評
In this project, a delay-dependent stabilizability criterion for asymptotic stabilizability for a class of uncertain neutral systems has been derived. It is interesting to consider more general uncertain neutral systems with multiple time-varying delays.
五、參考文獻
[1] J. S. Cheng and J. G. Hsieh, “Deterministic control of uncertain feedback systems with time-delay and series nonlinearities,” Int. J. Syst. Sci., vol. 26, pp. 691-701, 1995.
[2] K. K. Fan, Some Aspects of Neutral Systems: Stability Analysis and Stabilization, Ph.D. Dissertation, Kaohsiung: National Sun Yat-Sen University, 2002.
[3] J. K. Hale and S. M. Verduyn Lunel, Introduction to Functional Differential Equations. New York: Springer-Verlag, 1993.
[4] G. D. Hui and G. D. Hu, “Simple criteria for stability of neutral systems with multiple delays,” Int. J. Syst. Sci., vol. 28, pp. 1325-1328, 1997.
[5] V. B. Kolmanovskii and V. R. Nosov, Stability of Functional Differential Equations. London: Academic Press, 1986.
[6] Y. Kuang, Delay Differential
Equations with Applications in Population Dynamics. Boston: Academic Press, 1993.
[7] C. H. Lien, J. G. Hsieh, and Y. J. Sun, “Robust stabilization for a class of uncertain systems with multiple time delays via linear control,” J. of Math. Anal. Appl., vol. 218, pp. 369-378, 1998.
[8] W. B. Ma, N. Adachi, and T. Amemiya, “Delay-independent stabilization of uncertain linear systems of neutral type,” J. of Optim. Theory and Appl., vol. 84, pp. 393-405, 1995.
[9] D. A. O'connor and T. J. Tarn, “On stabilization by state feedback for neutral differential difference equations,” IEEE Trans. Autom. Control, vol. 28, pp. 615-618, 1983. [10] T. J. Su and P. L. Liu, “Robust
stability for linear uncertain time-delay systems with delay-dependence,” Int. J. Syst. Sci., vol. 24, pp. 1067-1080, 1993.
[11] Y. J. Sun, J. G. Hsieh, and Y. C. Hsieh, “Exponential stability criterion for uncertain retarded systems with multiple time-varying delays,” J. Math. Anal. Appl., vol. 201, pp. 430-446, 1996.
[12] D. Y. Xu and Z. F. Xu, “Stability analysis of linear delay-differential systems,” Control--Theory and Advanced Technol., vol. 7, pp. 629-642, 1991.
[13] H. S. Wu and K. Mizukami, “Robust stabilization of uncertain linear dynamical systems with time-varying delay,” J. of Opti. Theory and Appl., vol. 82, pp.