國
立
交
通
大
學
多媒體工程研究所
碩
士
論
文
一 個 基 於 花 與 葉 片 之 植 物 辨 識 系 統
A Plant Recognition System Based on Leaf and Flower
研 究 生:楊志鴻
指導教授:陳玲慧 教授
一個基於花與葉片之植物辨識系統
研究生:楊志鴻
指導教授:陳玲慧 博士
國立交通大學多媒體工程研究所
摘要
本篇論文中我們提出一個基於花與葉片之植物辨識系統,針對台
中都會公園的植物,利用照相手機所拍攝的花朵影像及葉片影像進行
辨識。辨識系統共分為三大部分。第一部分為花朵辨識系統,總共使
用了花朵的十四種特徵,包含三種外型以及十一種顏色的特徵。為了
從複雜的背景中擷取出花朵的部分,我們提出了一個快速自動化切割
物體的方法,並藉由使用者互動方式擷取出花朵部分。第二部份為葉
片辨識系統,共使用了葉片的五個外型特徵。葉片自動辨識系統分為
兩個階段,第一階段先將與輸入影像差異大的種類刪除,而第二階段
依據第一階段過濾後的數種名單進行最後的辨識動作。系統的第三部
份為針對開花植物中結合花朵以及葉片的辨識系統。首先,分別先將
花朵以及葉片進行辨識。接著,我們提出了一個有效結合花朵以及葉
A Plant Recognition System Based on Leaf and
Flower
Student: Chih-Hung Yang
Advisor: Dr. Ling-Hwei Chen
Institute of Multimedia Engineering
National Chiao Tung University
Abstract
In this thesis, we propose a plant recognition system based on leaf and flower
images. The images are taken in the Taichung Metropolitan Park by the camera
mobile phone. There are three parts in the recognition system: flower, leaf, and
combination of flower and leaf. In the flower recognition part, 14 features of flowers,
including 3 shape features and 11 color features, are used. We propose a fast and
automatic object segmentation method and combine user’s interaction to extract the
flower region. In the leaf recognition part, 5 shape features are extracted. A two-stage
approach is provided for automatic leaf recognition. Firstly, some impossible species
are pruned according to the first three features. Next, the remaining species are tested
of leaf and flower images are recognized respectively. Then, an effective method is
presented to do recognition by combining the recognition results of leaf and flower.
According to experimental results, the combining recognition part can improve the
誌 謝
這篇論文的完成,首先要感謝指導教授陳玲慧博士,在這兩年碩
士生涯中,老師在課業上和生活上給予的指導與關心,讓我在交大學
到的不僅是學業上的知識,還有更多做人做事的道理。另外,要感謝
李建興學長給予的建議以及指導。此外,感謝口試委員鍾國亮教授、
張隆紋教授以及李遠坤教授於口試中給予的指導與建議。
接著,要謝謝實驗室一起生活一起奮鬥的夥伴們,博士班的學長
姐們,民全、萓聖、文超、惠龍、俊旻、占和、盈如以及芳如,還有
畢業的學長姐們,立人、信嘉、偉全、子翔和薰瑩,以及同屆的同學,
益成、明旭與志達,和學妹佳瑄,因為有大家的陪伴,讓我兩年的碩
士生涯過得充實又豐富。
此外,還要感謝資工系壘的隊友們,謝謝你們讓我有機會能在壘
球場上盡情地發揮,並且一起努力拿到校外比賽,瘋竹盃冠軍、北資
盃亞軍的佳績,為我碩士生涯增添許多色彩。
最後,要感謝我最重要的家人:爸爸、媽媽、姐姐、妹妹以及香
鈞,在我的研究生涯中給予各種生活上的協助,讓我能專心於研究
中。謹以此篇論文獻給我的父母,以及所有關心我、鼓勵我的朋友們。
TABLE OF CONTENTS
摘要... i
Abstract... ii
誌 謝... iv
TABLE OF CONTENTS...v
LIST OF FIGURES ... vii
LIST OF TABLES... ix
CHAPTER 1 INTRODUCTION...1
1.1 Motivation...1
1.2 Previous work ...1
1.3 Organization of the Thesis ...4
CHAPTER 2 IMAGE DATABASE...5
2.1 Flower Image Database...5
2.2 Leaf Image Database...7
CHAPTER 3 PROPOSED system ...10
3.1 Flower Recognition Method ...10
3.1.1 Preprocessing for Flower ... 11
3.1.1.1 Flower Area Location by User Interaction...12
3.1.1.2 Spatial Regions Merging...13
3.1.1.3 Small Regions Merging ...15
3.1.1.4 Flower Region Selection and Extraction ...17
3.1.2 Feature Extraction for Flowers ...18
3.1.2.1 Shape Information...18
3.2.1.1 Gray-scale Transformation...24
3.2.1.2 Bi-level Transformation ...25
3.2.1.3 Principle Component Transformation...27
3.2.2 Feature Extraction for Leaf...28
3.2.2.1 Shape Information...29
3.2.3 Leaf Recognition...30
3.2.3.1 Preliminary Stage...30
3.2.3.2 Essential Stage ...38
3.3 Combining Recognition Method...38
3.3.1 Combining Recognition ...39
CHAPTER 4 EXPERIMENTAL RESULTS...41
CHAPTER 5 CONCLUSION...50
LIST OF FIGURES
Fig. 1 Images of 24 distinct flowers ...…...…..……..……….….6 Fig. 2 Some examples of flowers with different colors in the same species ...7 Fig. 3 24 distinct leaves corresponding to the blooming flowers shown in Fig. 1 ..8 Fig. 4 Other 24 species collected with leaves only ………...9 Fig. 5 The flow chart of the proposed method for flower recognition …….…….11 Fig. 6 The flow chart of the preprocessing steps of flower recognition ….……...12 Fig. 7 An example of determining flower area location by user interaction. (a)
Original image. (b) The rectangle is drawn by user …..………..13 Fig. 8 Two Sobel operators for Gx and Gy …..………..…………..…...14
Fig. 9 An example of the preprocessing results. (a) The original image. (b) The result of small region merging. (c) The petal and stamen region selected by user. (d) The stamen region …...18 Fig. 10 An example of the preprocessing results with the colors of petals and
stamens similar. (a) The original image. (b) The result of small region merging. (c) Flower region selected by user. (d) The stamen region …...18 Fig. 11 The HS space divided into 12x6 cells ..………...22 Fig. 12 The flow chart of the proposed method for leaf recognition ...……….…...24 Fig. 13 The flow chart of the preprocessing steps of leaf recognition …...….……24 Fig. 14 An example of gray-level transformation. (a) Original image. (b) Gray-level
image …..………...……….………...25 Fig. 15 An example of bi-level transformation. (a) Gray-level image. (b) Bi-level
image …...………....26 Fig. 16 A special case of bi-level transformation. (a) A bi-level image. (b) The result of first thresholding. (c) The result of second thresholding …...27 Fig. 17 An example of principle component transformation. (a) The boundary of a
leaf image and its principle component. (b) The transformed boundary of a leaf image ………..28 Fig. 18 The bounding box of a leaf ………..29 Fig. 19 The flow chart of leaf recognition method ………..30 Fig. 20 The ranges of three features. (a) The ranges of AR. (b) The ranges of RR. (c)
The ranges of SR ……….………37 Fig. 21 The flow chart of the proposed method for combining recognition……….39
recognition results. (c) The retrieved information of the query image. (d) Combining recognition results ….………...48
LIST OF TABLES
Table 1 The ranges of AR, RR and SR of every plant species in our database ……31 Table 2 Performance on our flower database ………...42 Table 3 Performance comparison between our method and Zou-Nagy’s method
using Zou-Nagy’s database ……….43 Table 4 Performance on our leaf database by returning Top-5 images ..…………..44 Table 5 Performance on our leaf database by returning Top-5 species ..…………..44 Table 6 Performance comparison between our method and Lee-Chen’s method
using Lee-Chen’s database ………….……….45 Table 7 Performance comparison between our method and Saitoh-Kaneko’s method
using the same numbers of Saitoh-Kaneko’s database ...………….……....45 Table 8 Performance comparison ………...…..…46
CHAPTER 1
INTRODUCTION
1.1 Motivation
When wandering around the field or park, we can find out many plants. If there
are no signs for the plants, we can not know their names on the instant. Although we
can try to identify the names of plants by looking up guide books for plant, or
browsing web pages on the Internet through keywords searching, it is inconvenient
and difficult to look for the name of specific plant. Since the camera mobile phone has
been widely used for most people, it would be very useful and convenient if we can
use the plant recognition system to identify the plants directly based on photograph by
camera mobile phone.
1.2 Previous work
Plants are basically classified according to their shapes, colors and structures of
their leaves and flowers. It is very difficult for us to recognize the plant without any
knowledge of botany. In this thesis, we proposed a plant recognition system based on
a photograph. It is a necessary step to extract a flower region or a leaf region of
interest from the background for recognition. However, it is more difficult to achieve
To avoid this difficulty, Saitoh and Kaneko [1, 2] used a piece of black cloth (or
black paper) under the flower and leaf when they took photographs. To separate the
background, they used K-means algorithm [3] for clustering in RGB space and then
removed the background region. Then, they proposed 21 features, including 10
features of flower and 11 features of leaf in recognition phase, and received a high
accuracy rate above 95%. Nevertheless, it is inconvenient and laborious to photograph
flowers and leaves with a piece of back cloth and the direction of leaf should be fixed.
Chen [4] proposed an automatic segmentation algorithm for natural images.
Considering from human vision, they transformed RGB color space into CIELab
color space [5-6]. Then, they also used K-means algorithm [3] to classify all colors in
the image and proposed a two-stage method to segment regions by colors. However,
the segmentation takes a lot of time and is impractical.
Zou and Nagy [7] used the rose curve which was defined by the Italian
mathematician Guido Grandi for segmentation. Firstly, they used a rose curve model
fitting on the initial segmented flower region and allowed interactive adjusting by user
to fit the real flower region. When adjusting the curve of the flower, the system would
Saitoh et al. [8] proposed an automatic method for extracting flower region and
recognition. For extracting the flower boundary, they used the well-known method
proposed by Mortensen and Barrett called Intelligent Scissors (IS) [9]. Pictures were
taken with macro mode setting F value from F2.8 to F3.5. They used 10 features for
flower recognition and received high accuracy above 90%. However, there are some
limitations such as the position of the flower must be in the center of the photograph
and be well focused, with background defocused.
Wang et al. [10] proposed a two-stage approach for leaf image retrieval by using
shape features such as centroid-contour distance (CCD) curve, eccentricity, and angle
code histogram (ACH). The two-stage approach can achieve a performance
comparable to an exhaustive search, but with a much reduced computational
complexity. The average recall rate is 38.1% for 20 return images.
Lee and Chen [11] proposed a classification method for leaf images. They
proposed 5 region-base features for leaf recognition. The accuracy rate is 82.33% and
the recall rate is 48.2% for 10 return images. However, the leaf should be put on the
light panel and the direction of leaf must be fixed when taking picture of leaf. It is
also inconvenient for users to get leaf image by this way.
In this thesis, we propose three methods in our recognition system, including
method is provided for flower segmentation which utilizes user’s interaction to
eliminate the limitations of photographs and to get a correct flower region of interest.
Then, we adopt 14 various features including 3 for shapes and 11 for colors for
recognition. Secondly, a two-stage automatic region-base method is used for leaf
recognition. We use some techniques to remove noises and to solve rotation problem.
Then, we can get the leaf region of interest and adopt 5 shape features for recognition.
Thirdly, we propose a combining recognition method based on a pair of images of
flower and leaf. The features of flower and leaf are extracted respectively by the steps
described above. Then, we combine the features of flower and leaf for recognition.
Experimental results show that the combining recognition method can get higher
accuracy rate than using only flower or leaf.
1.3 Organization of the Thesis
This thesis is composed of five chapters. In Chapter 1, the motivation and
previous works are introduced. Chapter 2 describes the database images including
flower and leaf images used in the study. The proposed recognition method is
CHAPTER 2
IMAGE DATABASE
The image database consists of flower images and leaf images taken in the
Taichung Metropolitan Park by camera mobile phone. Pictures were taken with macro
mode and an aperture value 2.8F. Camera mobile phone used is Nokia N82. All
images are re-scaled to the same size, 320x240 pixels, before recognition.
2.1 Flower Image Database
The flower image database consists of 684 flower images with 24 species. Each
of the flower images will be selected as the testing data, and the remaining 683
images are then used for database. There are at least 20 images for each species and
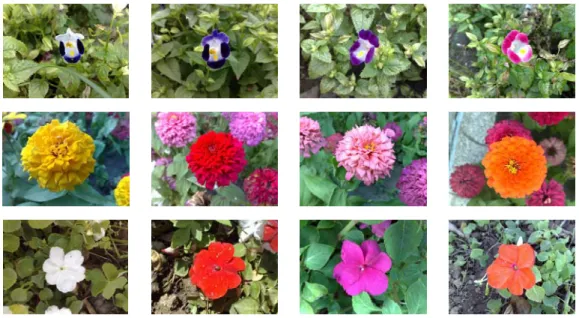
the images are taken from natural scene by camera mobile phone. Fig. 1 shows 24
species of flowers in our database. Several images contain multiple, tiny, overlapping
flowers. Some flowers have different colors in the same species as shown in Fig. 2.
Fig. 2 Some examples of flowers with different colors in the same species.
2.2 Leaf Image Database
Leaves are usually clustered, so it is difficult to extract a leaf automatically from
a natural image. As a result, we plucked a leaf and put it on a piece of white paper,
and took the picture of the leaf with camera mobile phone. Thus, leaf images can be
obtained without complex background.
The leaf image database consists of 1920 leaf images from 48 species. Each
species includes 40 images; the 20 images of them are used for database images and
the others are used for testing images. Fig. 3 shows the 24 species of the leaves, which
have corresponding blooming flowers shown in Fig. 1. For the other 24 species, we
only collect the leaves as shown in Fig. 4. For robustness, we plucked 15 to 20 leaves
CHAPTER 3
PROPOSED SYSTEM
In this thesis, we propose a recognition system for plants. The plant recognition
system has three functions which are flower recognition, leaf recognition and
combining recognition. When a user only input a flower image or a leaf image, this
system can recognize the query image and return the possible species to the user.
When the user input a pair of images including the flower and the leaf, this system
can get better result than only using a flower image or a leaf image. Details will be
described in the following sections.
3.1 Flower Recognition Method
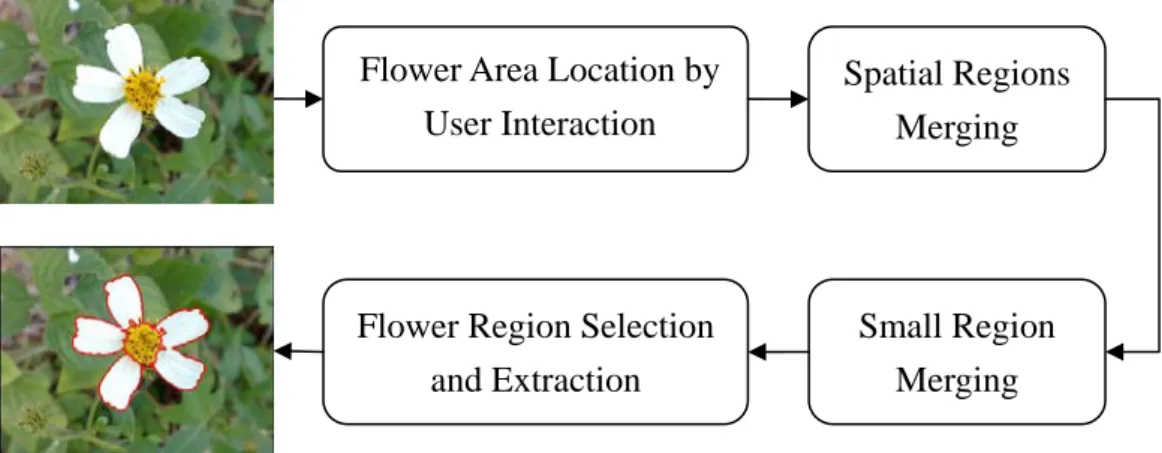
Fig. 5 shows the flow chart of the proposed method for flower recognition. The
whole process consists of three major phases: preprocessing, feature extraction, and
recognition. In the preprocessing phase, the proposed method provides a
semi-automatic technique to find out the flower region. In the feature extraction phase,
3 shape features and 11 color features are extracted for recognition. In the recognition
3.1.1 Preprocessing for Flower
Extracting a flower region from the background is a necessary step for flower
recognition. In order to extract the flower region as correctly as possible, the proposed
method provides a semi-automatic technique to locate the flower area. Because the
flower always has the significant color distinct from the leaves, we can use color
information to segment the region of the flower. Here the K-means algorithm is used
to find the dominant colors of the flower image. According to the statistics, there are
averagely fifty thousand colors in each flower image of our database. It costs
extensive computation time to extract the dominant colors form fifty thousand colors
by K-means. In order to speed up the process time, we first gather the nearby pixels
with the similar colors and merge them into small regions. After that, we can reduce
the colors of a flower image from fifty thousand to hundreds. Next, we use an
automatically segment method proposed in [4] to determine the dominant colors by
K-means and then replace the colors of small regions with the dominant colors. Then,
the region growing technique is applied to merge those neighboring small regions of Result Preprocessing Feature
Extraction Recognition
the same color. Finally, the flower region can be extracted by user selection based on
the segmentation results. Fig. 6 shows the flow chart of the preprocessing steps.
3.1.1.1 Flower Area Location by User Interaction
In order to reduce the limitations of input images and to extract the correct
flower region, an interactive method is provided. At first, a rectangle is drawn by
user’s mouse click to bind an interested flower. Fig. 7 shows an example of
determining flower area location by user interaction. We called the region within the
rectangle as the object region. After the flower area is located, we present a
semi-automatic segment method to extract the flower region. The details are described
in the following subsections.
Flower Area Location by User Interaction
Spatial Regions Merging
Small Region Merging Flower Region Selection
and Extraction
(a) (b)
Fig. 7 An example of determining flower area location by user interaction. (a) Original image. (b) The rectangle is drawn by user.
3.1.1.2 Spatial Regions Merging
Most of flowers have the significant color distinct from leaves, therefore the
color information is used to do segmentation and then we can extract the flower
region by user interaction. To reduce the number of colors in the image without losing
the important spatial information of colors, we first gather the nearby pixels with
similar colors in the object region into a small region. Note that the differences of
nearby pixels are below a threshold, we called them have the similar colors. The
threshold is determined by edge detection described as following:
To estimate edge points in the object region, we apply Sobel operators (see Fig.
8). The gradient magnitude G for pixel (x, y) with color value Px, y is defined as
(
) (
)
(
2) (
2)
, and 2 2 where , 1 , 1 1 , 1 , 1 1 , 1 1 , 1 , 1 1 , 1 , 1 1 , 1 1 , 1 , 1 1 , 1 2 2 − + − − − + + + + − + − − − − + + + − + + + − + + = + + − + + = + = y x y x y x y x y x y x y y x y x y x y x y x y x x y x P P P P P P G P P P P P P G G G GGx is the magnitude of horizontal gradient and Gy is the magnitude of vertical one.
-1 0 1
-2 0 2
-1 0 1
Gx-1 -2 -1
0 0 0
1 2 1
GyFig. 8 Two Sobel operators for Gx and Gy
We compute the gradient magnitudes for R, G, and B channels. Next, we take the
maximum value of three gradient magnitudes for each pixel to form another image.
And then the Otsu’s method [12] is applied to the image to get a binary image. Finally,
we can get all edge points from the binary image easily.
According to the edge detection result, the percentage of edge points and smooth
areas can be estimated. Then, we define four color differences: (i) the difference of R
channel, (ii) the difference of G channel, (iii) the difference of B channel, (iv) the total
difference of R, G and B channels which is defined as diff= (r1−r2)2+(g1−g2)2+(b1−b2)2. We calculate the four differences to the 8 neighbors for each pixel in the object region.
After that, we compute the four accumulated histograms and calculate the cumulative
distribution function (CDF), respectively. In each CDF, the difference value at the
same percentage as the smooth areas percentage is considered as threshold. Based on
color of the component is decided by the average color of all pixels in the component.
Each time when the component meets a new point, the four color differences between
the average color of the component and the new point will be calculated. If one of
these differences exceeds the threshold, the new point will be regarded as a starting of
a new component; otherwise, it will be included to the component and the process
will continue. After the process, there will be hundreds of connected component
regions with different sizes. Since most of the connected components are small, we
should merge those small regions. Thus, the next process will be used to merge small
regions. It will first find the dominant colors for these regions based on K-means and
replace the colors of these regions with those found dominant colors. The step is used
to speed up the merging process.
3.1.1.3 Small Regions Merging
In this section, we will apply a modified K-means method to merge small regions.
Before describing this method, we will introduce the used color space. Since the RGB
color space is perceptually non-linear to human vision system, the RGB color space
will be transformed into CIELab color space [5-6] based on ITU-R Recommendation
, 950227 . 0 119193 . 0 019334 . 0 072169 . 0 715160 . 0 212671 . 0 180423 . 0 357580 . 0 412453 . 0 ' ' ' ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ B G R Z Y X
,
088754
.
1
/
'
000000
.
1
/
'
950456
.
0
/
'
⎪
⎩
⎪
⎨
⎧
=
=
=
Z
Z
Y
Y
X
X
⎪⎩ ⎪ ⎨ ⎧ + > = − ⋅ = − ⋅ = − ⋅ = otherwise. 29 4 ) 6 29 ( 3 1 ) 29 6 ( if ) ( where )] ( ) ( [ 200 , )] ( ) ( [ 500 16 ) ( 116 * 2 3 3 1 * * , t t , t t f Z f Y f b Y f X f a Y f LAfter transforming the average color of each component to CIELab color space,
the modified K-means method is conducted. There is a significant drawback with the
traditional K-means algorithm; the K value cannot be adjusted after decided. Hence,
we use the concept from [4], that is, an “error threshold” is provided to decide the
suitable K. The average error after applying K-means method is defined as the
average color difference among the original colors and the colors of the results by
K-means. Firstly, we set K=2, and then the K-means method is applied. When the
average error is larger than the error threshold, K is increased and K-means method is (3) (2)
(5) (4)
our method, the error threshold is defined as 10% of the Lab color bandwidth. After
the step, the color of each pixel in the object region will be transformed to the nearest
dominant color. Then all neighboring pixels with the same dominant color are merged
into a region.
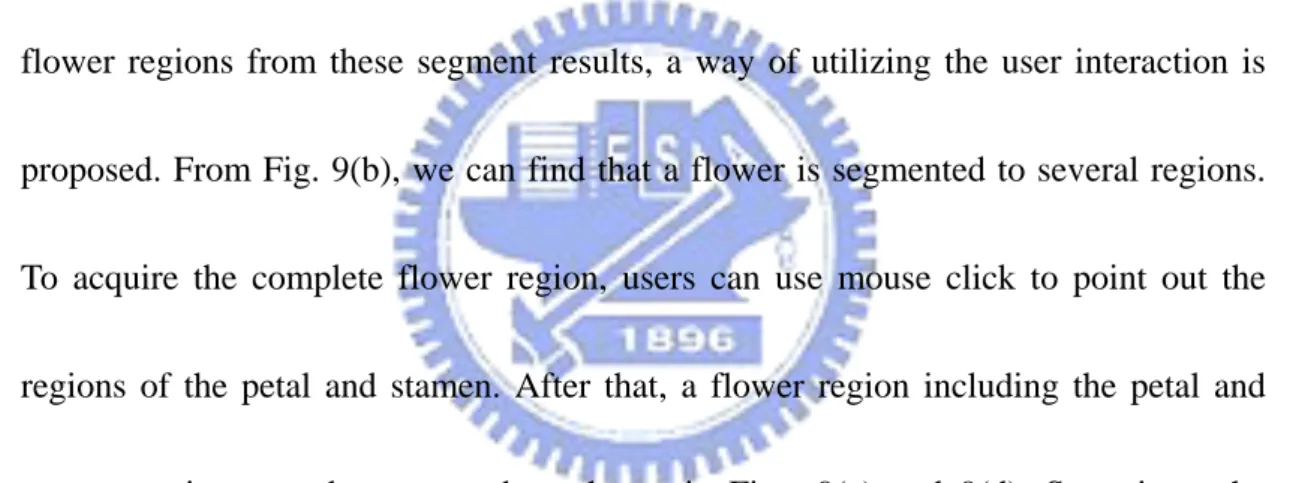
3.1.1.4 Flower Region Selection and Extraction
Based on the merging results, the object region can be segmented by dominant
colors as shown in Fig. 9(b). Since the system cannot automatically identify the
flower regions from these segment results, a way of utilizing the user interaction is
proposed. From Fig. 9(b), we can find that a flower is segmented to several regions.
To acquire the complete flower region, users can use mouse click to point out the
regions of the petal and stamen. After that, a flower region including the petal and
stamen regions can be extracted as shown in Figs. 9(c) and 9(d). Sometimes the
stamen color is so similar to the petal color, that the stamen region can not be
extracted. To treat this case, the stamen region is defined as the rectangular window
with the flower center as its center, and its area being 1/9 of the flower bounding box.
Fig. 10 shows an example of the preprocessing results with the colors of petals and
(a) (b) (c) (d) Fig. 9 An example of the preprocessing results. (a) The original image. (b) The segmentation results. (c) The petal and stamen region selected by user. (d) The stamen region.
(a) (b) (c) (d) Fig. 10 An example of the preprocessing results with the colors of petals and stamens similar. (a) The original image. (b) The segmentation results. (c) The flower region selected by user. (d) The stamen region.
3.1.2 Feature Extraction for Flowers
Color and shape are the most widely-used features for describing flowers. In this
thesis, 3 shape features and 11 color features are used for flower recognition. Parts of
these features were proposed by Hsu [13].
3.1.2.1 Shape Information
Firstly, the gravity center (gx, gy) of the flower region is computed as follows:
where N is the number of pixels in the flower region, xi and yi are the coordinates of
the ith pixel in the flower region. The distance between the flower center and each
pixel in the flower region is computed as follows:
. 1 , 2 2 N i ) g (y ) g (x di = i− x + i − y ≤ ≤
Without loss of generality, we let di be sorted in an increasing order. That is,
1 1 , 1 ≤ ≤ − ≤d+ i N
di i . The CDD [10] is a set of distances from those points in the contour to the shape center. Then the three shape features are described as follows:
F(1): Sharpness. A ratio indicates the relevance sharpness of the petals to the
flower. It is computed as , (1) 90 10 CCD CCD F =
where CCD10 represents the average of the top one-tenth of the shortest CCD and
the and CCD90 represents the average of the top one-tenth of the largest CCD.
F(2): It represents the average of normalized distances computed from the flower
center to every point in the flower region. It is computed as , 1 ) (2 1
∑
= = N i i D N Fwhere Di is the normalized distance defined as
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ ≤ < < − − ≥ = 10 90 10 10 90 10 90 , 0 , , , 1 R d R d R R R R d R d D i i i i i
and R represents the average distance computed from the pixels with d in the (7)
(8)
(9)
first 10% of dj and R90 is computed from the pixels with di in the last 10% dj: , 1 . 0 1 , 1 . 0 1 9 . 0 90 1 . 0 1 10
∑
∑
× = × = × = × = N N j j N j j d N R d N RF(3): Roundness. The roundness represents the similarity between the shape of
petals and a circle. It is computed as
, 4 ) 3 ( 2 L S F = π
where L is the perimeter of the flower and S is the area of the flower with 1
) 3 (
0< F ≤ . When F(3)is approximating to 1, it means that the shape of flower is
near a circle.
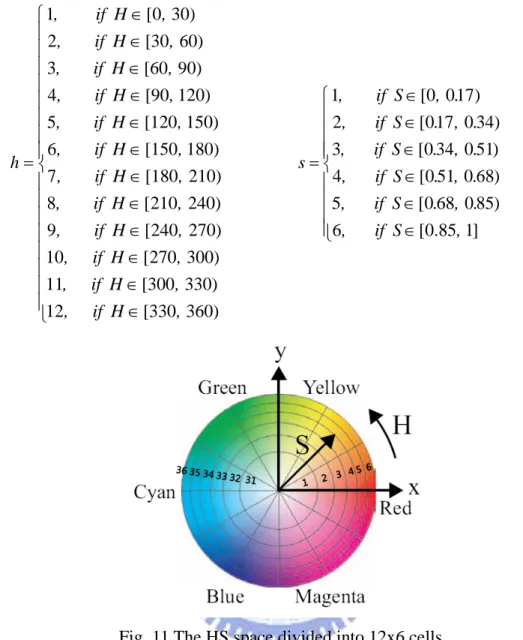
3.1.2.2 Color Information
The flower images are represented in the RGB model. Because flower images
are taken in different days and under various kinds of weather, the RGB values are
converted into the HSV (hue, saturation and value) values [14] in order to reduce the
illumination variation. Our features are taken by the primary, secondary and thirdly
flower colors and the stamen color. Firstly, the H value is divided into 12 partitions
and the S value is divided into 6 partitions and there are totally 72 cells represented by (12) (11)
three dominant color cells appearing in the flower region. Then, the color features can
be summarized as
F(4): the h value of the color cell DC1,
F(5): the s value of the color cell DC1,
F(6): the probability of the color cell DC1,
F(7): the h value of the color cell DC2,
F(8): the s value of the color cell DC2,
F(9): the probability of the color cell DC2,
F(10): the h value of the color cell DC3,
F(11): the s value of the color cell DC3,
F(12): the probability of the color cell DC3,
Since the color of the stamen is also an important characteristic, we will compute
the dominant color of the stamen region. Let SC denote the dominant color cell in the
stamen region, then the color features of the stamen are defined as
F(13): the h value of the color cell SC.
F(14): the s value of the color cell SC.
Note that we have used the following equations to normalize the H and S values
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎧ ∈ ∈ ∈ ∈ ∈ ∈ ∈ ∈ ∈ ∈ ∈ ∈ = ) 360 0 [33 12 ) 330 0 [30 11 ) 300 270 [ 10 ) 270 240 [ 9 ) 240 210 [ 8 ) 210 0 [18 7 ) 180 0 [15 6 ) 150 0 [12 5 ) 120 0 [9 4 ) 90 0 [6 3 ) 60 30 [ 2 ) 30 0 [ 1 , H if , , H if , , H if , , H if , , H if , , H if , , H if , , H if , , H if , , H if , , H if , , H if , h ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ ∈ ∈ ∈ ∈ ∈ ∈ = ] 1 .85 0 [ 6 ) 85 0 68 0 [ 5 ) 68 0 51 0 [ 4 ) 51 0 34 0 [ 3 ) 34 0 17 0 [ 2 ) 17 0 0 [ 1 , S if , . , . S if , . , . S if , . , . S if , . , . S if , . , S if , s
Fig. 11 The HS space divided into 12x6 cells.
3.1.3 Flower Recognition
Before recognition, all features, F(i), are normalized to [0, 1] and represented by
f(i). In the recognition phase, we calculate the distances between the query image and
all flower images in the database. The distance disti, which is between the query
where fi(k) denotes the k-th feature value of the i-th database image, f(k) denotes the
k-th feature value of the query image. Then, flower recognition is accomplished using
the k-nearest neighbor algorithm. After that, the recognition system ranks the
distances and returns the Top-20 nearest neighbors. Then, the system gives scores to
each rank such as 1st = 20, 2nd = 19 …, respectively. Next, we sum up the scores of the
same species and compute the similarity. Finally, we rank the similarity and return the
flower images of possible species.
3.2 Leaf Recognition Method
The leaf recognition method is originally proposed by Huang [15]. Based on the
method, we do some improvement in leaf extraction and recognition rate. Fig. 12
shows the flow chart of the proposed method for leaf recognition. The whole process
consists of three major phases: preprocessing, feature extraction and recognition. In
preprocessing phase, we use some techniques to extract the leaf object. In the feature
extraction phase, five shape features are extracted for recognition. Then, we apply a
two-stage recognition based on the extracted features. The impossible species can be
pruned in the first stage. The second stage uses a similarity measure for the remaining
3.2.1 Preprocessing of Leaf
When we take picture of the leaf image, there could be some distortion
(including rotation, translation and scaling) and unbalanced light condition. Therefore,
we have to overcome these problems according to following five steps as shown in
Fig. 13. After that, the leaf object can be extracted and be normalized.
3.2.1.1 Gray-scale Transformation
Original Leaf Image Gray-scale Transformation Bi-level Transformation Principle Component Transformation Result Preprocessing Feature Extraction Recognition Fig. 12 The flow chart of the proposed method for leaf recognition.image to a gray-level image. Each pixel is computed from the original image by , 3 ) , ( ) , ( ) , ( ) , (i j R i j G i j B i j gray = + +
where R(i, j), G(i, j) and B(i, j) denote the red value, green value and blue value at
pixel Pi, j. An example of gray-level transformation is shown in Fig. 14.
(a) (b)
Fig. 14 An example of gray-level transformation. (a) Original image. (b) Gray-level image.
3.2.1.2 Bi-level Transformation
To simplify the cost of computation, we transform the gray-level image to
bi-level image. Otsu’s method [12] is a classical method, which binarizes a gray-level
image to a binary image. The algorithm assumes that an image contains two classes of
pixels. It finds the optimum threshold separating the two classes so that their
within-class variance is minimal.
After using Otsu’s method to find the optimum threshold, the pixels are
separated into background area and leaf object area. The pixel with gray value in the
gray-level image larger than the threshold t be considered as background and set its (14)
gray value to 255; otherwise, it is regarded as the leaf object and set its gray value to 0.
An example of bi-level transformation is shown in Fig. 15.
(a) (b)
Fig. 15 An example of bi-level transformation. (a) Gray-level image. (b) Bi-level image.
By the above steps, we can extract the leaf objects correctly from most of the leaf
images. Some species of the leaf images can not be extracted successfully, because
the size of the leaf is too small or the color of the leaf is too light. Hence, the
following steps will solve this problem on the bi-level image (See Fig. 15(b)). Firstly,
the positions of the black pixels in the bi-level image are recorded. Next, we preserve
the pixels in the gray-level image according to the positions. Then, the Otsu’s method
is applied to these pixels on the gray-level image to do bi-level transformation. Fig. 16
is an example of this case. After bi-level transform, we can get a binary image. Based
(a) (b) (c) Fig. 16 A special case of bi-level transformation. (a) A gray-level image. (b) The
result of first thresholding. (c) The result of second thresholding.
3.2.1.3 Principle Component Transformation
We face another issue that the direction of the leaf images are various during
feature extraction. To solve this problem, we use the principle component to align the
image with the direction of maximum variance.
Let
Xk = (xk, yk) be the position of the k-th boundary point of a leaf pixel,
n = the number of boundary pixels.
We present the steps of principle component transformation as follows:
1. Compute the center point mx of the boundary pixels by
∑
= = n k k x X n m 1 , 12. Compute the covariance matrix
∑
= − = n k T k k T k k x X X m m n C 1 , 13. Let V = (ei, ej) be the normalized associated eigenvector of the max eigenvalue of
θ . Note that V is the principle (15)
component of the boundary points.
4. Let the transformation matrix A be ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − θ θ θ θ cos sin sin cos .
5. Rotate the leaf with θ degree according to Yk = A(Xk −mx),
such that the principle component of the boundary points will coincide with the x-axis.
Fig. 17 shows an example of principle component transformation.
(a) (b)
Fig. 17 An example of principle component transformation. (a) The boundary of a leaf image and its principle component. (b) The transformed boundary of a leaf image.
3.2.2 Feature Extraction for Leaf
Note that most leaves have green color, the color information is improper for
recognition. According to the theory of plant taxonomy [16], external leaf
characteristics are important for identifying plant species. Thus, we use the shape
information of leaf for recognition. In this section, 5 shape features are used. We use a
rectangle enclosing the leaf, and call it as a bounding box, B, shown in Fig. 18. (17)
Fig. 18 The bounding box of a leaf.
3.2.2.1 Shape Information
L(1): Aspect Ratio (AR). The AR represents the ratio of the vertical length
(height) to horizontal length (width) of B. It is computed as . (1) B of width B of height L =
L(2): Rectangularity Ratio (RR). The RR represents the ratio of the area of the
leaf to the area of B. It is computed as . (2) B of area the leaf of area the L =
L(3): Sharpness Ratio (SR). The SR represents the ratio of the average of the top
one-tenth of the shortest CCD to the average of the top one-tenth of the largest CCD.
It is computed as . (3) 90 10 CCD CCD L =
L(4): UpAndDown Ratio (UDR). The UDR represents the ratio of the area of the
upper part to the area of lower part of the leaf. It is computed as . (4) leaf the of area leaf the of area L lower upper =
L(5): LeftAndRight Ratio (LRR). The LRR represents the ratio of the area of the
(18)
(19)
(20)
left part to the area of the right part of the leaf. It is computed as . (5) leaf the of area leaf the of area L right left =
3.2.3 Leaf Recognition
Fig. 19 is the flow chart of leaf recognition method. The proposed method
contains two stages: preliminary and essential. The preliminary phase is to prune
some impossible species based on three features. The essential phase is to recognize
the query image based on five features.
3.2.3.1 Preliminary Stage
Since each plant species has its own specific shape, we can use the shape
characteristics to prune impossible species. Here, we take AR, RR, and SR as features.
The steps of the preliminary stage are listed as follows:
(22)
Shape Features Preliminary Stage
Essential
Stage Result
i-th plant specie in database.
2. Let rangei = {rangei(AR), rangei(RR), rangei(SR)}.
3. Consider each plant species in database as a candidate if all the features AR, RR,
and SR of the query image fall in the range of this plant species.
Table 1 and Fig. 20 show the ranges of AR, RR and SR of all plant species in our
database.
Table 1 The ranges of AR, RR and SR of every plant species in our database. (continued)
AR RR SR Plant Species
Min Max Min Max Min Max
S1 0.500005 0.773026 0.313155 0.430668 0.141353 0.306348
S2 0.490891 0.835501 0.655937 0.739268 0.470754 0.728605
S3 0.364929 0.475650 0.561458 0.638728 0.371395 0.477601
S4 0.289997 0.518000 0.591908 0.693873 0.229458 0.425193
Table 1 The ranges of AR, RR and SR of every plant species in our database. (continued)
AR RR SR Plant Species
Min Max Min Max Min Max
S6 0.646994 0.957895 0.483377 0.650202 0.446093 0.579906 S7 0.342713 0.453393 0.592032 0.687368 0.348970 0.452622 S8 0.369100 0.659794 0.684117 0.744928 0.345730 0.555043 S9 0.850267 0.966887 0.341329 0.524770 0.232662 0.405166 S10 0.373110 0.571885 0.467892 0.542941 0.348888 0.466524 S11 0.613636 0.910714 0.324896 0.534139 0.089039 0.461601 S12 0.696098 0.961259 0.463078 0.643130 0.197574 0.579269
Table 1 The ranges of AR, RR and SR of every plant species in our database. (continued)
AR RR SR Plant Species
Min Max Min Max Min Max
S14 0.300813 0.484314 0.482751 0.618298 0.219108 0.420216 S15 0.490697 0.655044 0.580597 0.658235 0.397417 0.586286 S16 0.350489 0.501208 0.594031 0.732827 0.250404 0.408398 S17 0.149356 0.521739 0.311594 0.722101 0.126961 0.180075 S18 0.403383 0.915913 0.534473 0.743730 0.354658 0.523828 S19 0.481512 0.731455 0.501748 0.666173 0.470612 0.699087 S20 0.127660 0.197935 0.515042 0.721839 0.142460 0.169629 S21 0.577416 0.757615 0.561470 0.642953 0.549425 0.709965
Table 1 The ranges of AR, RR and SR of every plant species in our database. (continued)
AR RR SR Plant Species
Min Max Min Max Min Max
S22 0.376590 0.589474 0.556220 0.688156 0.371869 0.487669 S23 0.268229 0.408092 0.638544 0.743659 0.262652 0.397760 S24 0.838626 0.978536 0.644065 0.706955 0.525970 0.725693 S25 0.566434 0.915295 0.549771 0.709073 0.523594 0.748094 S26 0.264264 0.447305 0.603989 0.761816 0.259365 0.423183 S27 0.508361 0.743867 0.598305 0.703685 0.462139 0.684671 S28 0.433658 0.732143 0.635302 0.708608 0.397673 0.715808
Table 1 The ranges of AR, RR and SR of every plant species in our database. (continued)
AR RR SR Plant Species
Min Max Min Max Min Max
S30 0.328562 0.709290 0.619182 0.747966 0.280579 0.567571 S31 0.251634 0.372642 0.470335 0.628621 0.245393 0.371333 S32 0.525510 0.810164 0.526402 0.671394 0.464076 0.746022 S33 0.119326 0.237569 0.346524 0.661944 0.110767 0.136062 S34 0.310665 0.460616 0.579032 0.725554 0.262772 0.444621 S35 0.426464 0.618236 0.628875 0.731921 0.409101 0.607532 S36 0.557103 0.735288 0.569495 0.648156 0.488965 0.678543 S37 0.420440 0.559009 0.636115 0.732630 0.387697 0.545420
Table 1 The ranges of AR, RR and SR of every plant species in our database. (continued)
AR RR SR Plant Species
Min Max Min Max Min Max
S38 0.287793 0.352576 0.579252 0.692514 0.246174 0.352030 S39 0.445313 0.886624 0.630633 0.708960 0.445922 0.582450 S40 0.406164 0.601597 0.635243 0.687023 0.377741 0.549532 S41 0.412806 0.559542 0.658390 0.731062 0.371005 0.516199 S42 0.398457 0.533146 0.606449 0.696520 0.393285 0.524849 S43 0.276878 0.331878 0.538492 0.639607 0.211772 0.310246 S44 0.392135 0.610905 0.584610 0.710791 0.337063 0.553846
Table 1 The ranges of AR, RR and SR of every plant species in our database. (continued)
AR RR SR Plant Species
Min Max Min Max Min Max
S46 0.360243 0.503852 0.630388 0.724279 0.364011 0.492582
S47 0.497874 0.864877 0.421029 0.583044 0.147642 0.541633
S48 0.808081 0.978102 0.412950 0.552835 0.111141 0.357392
(a) (b)
(c)
3.2.3.2 Essential Stage
After the preliminary stage, some candidate species have been selected. Then, we
calculate the distances between the query image and the candidate images in the
database. The distance disti, which is between the query image and the i-th image in
the database, is measured by
∑
= − = 5 1 , ) ( ) ( k i i L k L k distwhere the Li(k) denotes the k-th feature value of the i-th database image, L(k) denotes
the k-th feature value of the query image. Leaf recognition is accomplished using the
k-nearest neighbor algorithm. After that, the recognition system ranks the distances
and returns the Top-20 nearest neighbors. Then, we give scores to each rank such as
1st = 20, 2nd = 19 …, respectively. Next, we sum up the scores of the same species as
the similarity value. Finally, we rank the similarity value and return the leaf images of
possible species.
3.3 Combining Recognition Method
plant only by flower images or leaf images. Therefore, we proposed a recognition
system combining the flower and leaf information to improve recognition rate. Fig. 21
shows the flow chart of the proposed method for combining recognition.
3.3.1 Combining Recognition
In the combining recognition phase, the flower and leaf images of a particular
plant were obtained. Then, the features of the flower and leaf are extracted by the
steps described in sections 3.1 and 3.2. After that, the distances between the query
image and all images in the database are calculated and then the distances are ranked.
The steps are listed below:
1. Get the Top-40 nearest neighbors for the flower and give scores to each rank such
as 1st = 40, 2nd = 39 …, respectively. Next, sum up the scores of the same species.
2. Get the Top-40 nearest neighbors for the leaf and give scores to each rank such as Fig. 21 The flow chart of the proposed method for combining recognition.
Preprocessing Feature Extraction Combining Recognition Result Preprocessing Feature Extraction
1st = 40, 2nd = 39 …, respectively. Next, sum up the scores of the same species.
3. Preserve the species appearing both in step1 and step2. Sum up the scores of the
same species in step1 and step2 as the similarity measure.
4. Rank the similarity measure and return the possible species.
Finally, we can get the most similar species of the query images and the results are
CHAPTER 4
EXPERIMENTAL RESULTS
In this chapter, experiments are conducted to evaluate the performance of the
proposed method. Firstly, the recognition results of flowers are presented based on
two databases. One is our database of 684 flower images consisting of 24 species and
the other is Zou-Nagy’s [7] database of 612 flower images with 102 species. The
performance of our system in flower recognition will be compared with Zou-Nagy’s
method. Secondly, the recognition results of leaves are presented based on two
databases. One is our database of 960 leaf images consisting of 48 species. The other
is Lee-Chen’s [11] database of 600 leaf images with 60 species. We will compare the
performance between our method and Lee-Chen’s method. Thirdly, the recognition
results of combining system are presented based on two databases. One is our
database consisting of 16 species, including 320 flower images and 320 leaf images.
The other is Saitoh-Kaneko’s [1] database containing 16 species with 320 flower
images and 320 leaf images. The performance of our system will be compared with
Saitoh-Kaneko’s method. Finally, we will compare the performance between our three
recognition methods.
Each flower image in our database is re-scaled to 320x240 pixels. We pick out
flower images as the training data. The results are shown in Table 2. The first row of
Table 2 is measured by returning the Top-5 most similar images to the query image of
the flower recognition method. The second row of Table 2 is measured by returning
the Top-5 most similar species to the query image of the flower recognition method.
Table 2 Performance on our flower database. Recognition rate (%)
Top-1 Top-2 Top-3 Top-4 Top-5
Number of images Number of species Similar images 81.43 89.33 92.25 94.44 96.35 684 24 Similar species 76.9 93.12 98.25 99.12 99.71 684 24
We also conduct the proposed method on Zou-Nagy’s [7] database collected
from [17]. All images in Zou-Nagy’s database have the same size of 320x240. There
are six images for each species. Some pictures are quite out of focus and the objects
are too small and overlapping. The results are shown in Table 3. We can see that the
processing time of our method is faster than Zou-Nagy’s and the Top-3 recognition
rate (87.6%) is much higher than Zou-Nagy’s (79%) with 8.5 seconds by user’s
rose-curve adjustments before labeling the flower to the class. Although Zou-Nagy’s
Table 3 Performance comparison between our method and Zou-Nagy’s method using
Zou-Nagy’s database.
Recognition rate (%) Time (s)
Top-1 Top-2 Top-3 Top-4 Top-5 Our method (similar images) 4.3 76.1 83.8 87.6 90.5 91.3 Our method (similar species) 4.3 67.3 84.2 92.2 93 93.5 Zou-Nagy’s method (before labeling) 8.5 52 - 79 - - Zou-Nagy’s method (labeling) 10.7 93 - - - -
In our leaf recognition method, each species of leaf includes 40 images; 20 of
them are selected as database images and the remaining are used for testing data. The
results are shown in Table 4 and Table 5. The results of Table 4 are measured by
returning the Top-5 most similar images, and the results of Table 5 are measured by
returning the Top-5 most similar species. The first row of Table 4 and Table 5 is the
performance of the leaves having blooming flowers. The second row of Table 4 and
Table 5 is the performance of the other leaves. The third row of Table 4 and Table 5 is
Table 4 Performance on our leaf database by returning Top-5 images. Recognition rate (%)
No.
Top-1 Top-2 Top-3 Top-4 Top-5
Number of images Number of species 1 74.8 86.7 91.5 94 95.8 480 24 2 62.1 76 83.3 87.3 91.3 480 24 3 58.1 71.5 79.9 84.7 87.9 960 48
Table 5 Performance on our leaf database by returning Top-5 species. Recognition rate (%)
No.
Top-1 Top-2 Top-3 Top-4 Top-5
Number of images Number of species 1. 68.5 90.4 96 98.3 99.4 480 24 2 60 79 88.3 94.6 96.9 480 24 3 52.6 73.1 82.1 89.1 93.2 960 48
We also conduct the proposed method on Lee-Chen’s [4] database. Each image
size of Lee-Chen’s database is 640x480 pixels. Each species in their database includes
15 images; 10 of them are database images and the others are used for testing data.
The results are shown in Table 6. We can see that the recall rate of our method (51.4%)
is much higher than Lee-Chen’s (48.2%) from Table 6. However, Lee and Chen tuned
the weights of features to achieve the optimal recognition rate. Hence, our recognition
rate (70%) is lower than Lee-Chen’s (82.33%) by returning the most similar image.
Nevertheless, our recognition rate can achieve 94.33% by returning the Top-5 most
Table 6 Performance comparison between our method and Lee-Chen’s method using
Lee-Chen’s database.
Recognition rate (%)
Top-1 Top-2 Top-3 Top-4 Top-5
Recall rate (%) Our method (similar images) 70 77.67 84.33 88.67 91.67 51.4 Our method (similar species) 65 82 88.33 93 94.33 51.4 Lee-Chen’s method 82.33 - - - - 48.2
In order to compare the performance with Saitoh-Kaneko’s [1] method, we
collected the same numbers of species and images with Saitoh-Kaneko’s database, the
reason is that we can not get their database. The recognition results are listed in Table
7. We can see that the recognition rate of our method is much higher than
Saitoh-Kaneko’s method.
Table 7 Performance comparison between our method and Saitoh-Kaneko’s method
using the same numbers of Saitoh-Kaneko’s database. Recognition rate (%)
Top-1 Top-2 Top-3
Our method 97.5 100 100
Saitoh-Kaneko’s method 96.03 99.26 99.26
Only flower images of 24 species; (ii) Only leaf images of 24 species which
correspond to (i); (iii) A pair of flower and leaf images of 24 species. Table 8 shows
the performance results. From Table 8, we can see that the combining method get
higher recognition rate than those using only flower or leaf image. Hence, the
combining recognition method is more effective and can provide better results to user.
Table 8 Performance comparison. Recognition rate (%)
Method
Top-1 Top-2 Top-3 Top-4 Top-5
Number of images Number of species Our method (Flower) 76.9 93.1 98.3 99.1 99.7 684 24 Our method (Leaf) 68.5 90.4 96 98.3 99.4 480 24 Our method (Combining) 94.4 99.7 100 100 100 684 24
We have built a plant recognition system written in Java language on a PC. Figs.
22(a), 22(b) and 22(c) are the interfaces for the flower, leaf and combining
recognition systems, respectively. Figs. 23(a), 23(b) and 23(d) are the interface for
recognition results of flower, leaf and combining recognition systems respectively.
system to know the species of the plant which they did not know before.
(a) (b)
(c)
Fig. 22 Interfaces of recognition system. (a) Flower recognition system. (b) Leaf recognition system. (c) Combining recognition system.
(a)
(b)
(c)
(d)
Fig. 23 Interfaces for recognition results. (a) Flower recognition results. (b) Leaf recognition results. (c) The retrieved information of the query image. (d) Combining recognition results.
CHAPTER 5
CONCLUSION
In this thesis, we have proposed a plant recognition system based on leaf and
flower. In the flower recognition system, we use an automatic segmentation based on
human visual system. Then, a simple and interactive user interface is applied.
According to the shape and color features of the flower, 14 features are extracted from
the segmented flower image. Finally, a similarity measure is provided to do
recognition.
In the leaf recognition system, we also proposed an automatic segmentation
method and a solution to treat rotation problem. Next, we extract 5 features according
to the characteristics of the leaf shapes. Then, we preserve possible species and find
out the similar images from leaf image database by similarity distance.
In the combining recognition system, a new method has been proposed for
recognizing plants based on leaf and flower. Firstly, the features of the leaf and flower
are extracted. Next, we calculate the similarity between the query image and database
images of leaf and flower and then combine the results of leaf and flower. Finally, the
recognition system. This means that our combining recognition system can get higher
REFERENCES
[1] T. Saitoh and T. Kaneko, “Automatic Recognition of Wild Flowers,” Proc.
International Conference on Pattern Recognition, Vol. 2, pp. 507-510, 2000.
[2] T. Saitoh and T. Kaneko, “Automatic Recognition of Wild Flowers,” Systems and
Computers in Japan, Vol. 34, pp. 90-101, 2003.
[3] J. B. MacQueen, “Some methods for classification and analysis of multivariate
observations,” Proceedings of 5-th Berkeley Symposium on Mathematical
Statistics and Probability, Berkeley, University of California Press, 1: pp.
281-297, 1967.
[4] L. J. Chen, “A Fast Automatic Segmentation Algorithm based on Local
Color-Distribution,” Master Thesis, Institute of Multimedia and Engineering,
National Chiao Tung University, Taiwan, ROC, 2007.
[5] Dan Margulis, “Photoshop Lab Color: The Canyon Conundrum and Other
Adventures in the Most Powerful Colorspace,” ISBN 0321356780.
[6] Lab color space, Wikipedia Google, URL:
http://en.wikipedia.org/wiki/Lab_color_space.
[8] T. Saitoh, K. Aoki and T. Kaneko, “Automatic Recognition of Blooming Flowers,”
Proc. International Conference on Pattern Recognition, Vol. 1, pp. 27-30, 2004.
[9] E-N. Mortensen and W-A. Barrett, “Intelligent Scissors for Image Composition,”
Proc. Computer Graphics and Interactive Techniques, pp. 191-198, 1995.
[10] Z. Wang, Z. Chi and D. Feng, “Shape Based Leaf Image Retrieval,” IEE
Proc.-Vis. Image Signal Proc., Vol.150, No. 1, pp. 34-43, 2003.
[11] C.L. Lee and S.Y. Chen, “Classification of Leaf Images,” International Journal
of Imaging Systems and Technology, Vol. 16, No. 1, pp. 15-23, Jul. 5, 2006.
[12] N. Otsu, “A Threshold Selection Method from Gray-level Histogram,” IEEE
Transactions on Systems, Man, Cybernetics 8, 1978.
[13] T. H. Hsu, “An Interactive Method for Flower Recognition,” Master Thesis,
Institute of Multimedia and Engineering, National Chiao Tung University,
Taiwan, ROC, 2008.
[14] HSL and HSV, Wikipedia Google, URL:
http://en.wikipedia.org/wiki/HSI_color_space.
[15] H. Y. Huang, “An Automatic Recognition System of Leaves,” Master Thesis,
Institute of Multimedia and Engineering, National Chiao Tung University,
[16] Plant taxonomy, Wikipedia Google, URL:
http://en.wikipedia.org/wiki/Category:Plant_taxonomy.