國
立
交
通
大
學
電機與控制工程學系
碩士論文
離散非線性系統之類滑模控制器設計與研究
Study of Quasi-Sliding Mode Controller for a Class of
Discrete-Time Nonlinear Systems
研 究 生:邱紹偉
指導教授:梁耀文 博士
離散非線性系統之類滑模控制器設計與研究
Study of Quasi-Sliding Mode Controller for a Class of
Discrete-Time Nonlinear Systems
研 究 生:邱紹偉 Student:Shau-Wei Chiou
指導教授:梁耀文 博士 Advisor:Yew-Wen Liang
國立交通大學
電機與控制工程學系
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering
College of Electrical Engineering
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering
July 2008
Hsinchu, Taiwan, Republic of China
離散非線性系統之類滑模控制器設計與研究
離散非線性系統之類滑模控制器設計與研究
離散非線性系統之類滑模控制器設計與研究
離散非線性系統之類滑模控制器設計與研究
研究生:邱紹偉
指導教授:梁耀文 博士
國立交通大學電機與控制工程學系碩士班
摘
要
本篇論文將 Bartoszewicz 所提出的類滑模控制設計(1998)從離
散線性系統推廣到離散非線性系統,允許選用的順滑函數並不限定是
線性的形式。本論文提出三種方式來設計順滑函數,並根據外界干擾
之變動速率提出兩種類滑模控制器。這類滑模控制器的特點在於它可
以使系統有效的減輕切跳現象,並且降低控制所需消耗的能量提昇系
統性能。所設計的結果也成功的應用在拖車系統中,並與模糊控制器
的控制結果做比較,模擬結果說明了類滑模控制的優點及其穩健性。
Study of Quasi-Sliding Mode Controller for a Class of Discrete-Time
Nonlinear Systems
Student:Shau-Wei Chiou Advisor : Dr. Yew-Wen Liang
Department of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
In this thesis, we extend Bartoszewicz’s design of quasi-sliding mode
control for discrete-time linear systems (1998) to a class of discrete-time
nonlinear systems. The selected sliding surface in this extension is
allowed to be nonlinear rather than only linear one. Three schemes for the
selection of sliding surfaces, and two quasi-sliding mode controllers
according to the variation rate of disturbances are presented in this study.
The obtained analytic results are also employed to study the control of a
trailer-truck system. Simulation results with comparisons to those of
fuzzy controllers demonstrate the benefits of the proposed schemes.
誌 謝
本篇論文的完成,真的要感謝太多人了,如果沒有你們的幫助,我恐怕無法有 所精進,希望日後你們能繼續給予我指教與鼓勵,必銘記在心! 首先我要感謝我的指導教授梁耀文博士在專業領域上的指導,使我在這兩年的 學習中受益良多,除此之外老師對於日常生活以及人生處世方面,也不吝提供許 多寶貴的意見,相信對於往後的人生規劃必有所助益,也要感謝口試委員黃正自 博士、陳俊宏博士和鐘文敬博士給予指正與寶貴的建議,使本論文更加完備。 接下來要感謝曾昭銘學長、陳宏泰學長、陳逸康學長以及徐聖棟學長在我遇到 困難時能給予適時的幫助與鼓勵,再來要感謝實驗室的同學益銘、丞昶在研究上 給予的支持與協助,而學弟立偉、家榮、士盺也都會適時的給予我一些意見,感 謝你們對我的幫助,使我能夠更專心於研究,以及感謝其他的同學,你們曾給予 我幫助,陪我度過這兩年的日子,充實我的研究生活。 最後我要感謝我的家人,感謝我的父親、母親以及妹妹們,總是無時無刻的包 容我,在這我將這論文獻給你們,謝謝你們對我的支持與鼓勵,讓我可以無後顧 之憂的在學業上勇往直前,進而完成研究所的學業,非常謝謝你們!目
目
目
目
錄
錄
錄
錄
頁次 中文摘要 i 英文摘要 ii 誌謝 iii 目錄 iv 表目錄 vi 圖目錄 vii Chapter 1 緒論. . . 1 1.1 研究背景. . . 1 1.2 研究動機. . . 3 1.3 論文架構. . . 4 Chapter 2 預備知識. . . 5
2.1 離散型滑模控制(discrete-time sliding mode control)條件. . . 5
2.2 離散型滑模控制特性. . . 9
2.3 類滑模之定義. . . 14
2.4Schur complement . . . 15
Chapter 3 針對離散非線性系統之類滑模(Quasi-Sliding Mode,QSM)控制. . . . 19
3.1 系統描述. . . 19
3.2 順滑面之選取. . . 20
3.2.1 狀態回授法(state feedback) . . . 21
3.2.2 線性二次調節器法(Linear Quadratic Regulator,LQR) . . . 22
3.3 類滑模控制器設計. . . 30 3.3.1 非線性迫近. . . 31 3.3.2 修正型非線性迫近. . . 33 Chapter 4 應用範例模擬之比較與分析. . . 36 4.1 拖車系統(trailer-truck model) . . . 36 4.2 非線性迫近控制器以及修正型非線性迫近控制器之設計. . . 42 4.3 收斂區間之估計. . . 53 4.4 當考慮干擾雜訊時,拖車系統使用模糊控制、非線性迫近控制、修正型 非線性迫近控制之模擬比較. . . 67 Chapter 5 結論與未來研究方向. . . 72 5.1 結論. . . 72 5.2 未來研究方向. . . 73 參考文獻. . . 75
表
表
表
表
目
目
目
目
錄
錄
錄
錄
表 4.1 拖車參數設定. . . 39 表 4.2 當考慮雜訊時,狀態收斂至 x ≤0.1的時間. . . 67 表 4.3 當考慮雜訊時,系統之誤差總和. . . 68 表 4.4 當考慮雜訊時,控制器之 u ∞以及 2 u . . . 70
圖
圖
圖
圖
目
目
目
目
錄
錄
錄
錄
圖 2.1 採用離散型滑模條件(2-2)時,順滑變數s[k]可能呈現之軌跡圖. . . 6 圖 2.2 離散型滑模條件(2-3)式以及(2-5)式之軌跡收斂圖. . . 8 圖 2.3 連續順滑模態控制之系統軌跡. . . 11 圖 2.4 理想的離散順滑模態控制之系統軌跡. . . 12 圖 2.5 實際的離散順滑模態控制之系統軌跡. . . 13 圖 3.1 根據(3-41)式所描述之sd[k] 的圖形. . . 32 圖4.1 拖車示圖. . . .37 圖4.2 控制器u[0]所能旋轉的角度. . . 40 圖4.3 拖車系統的狀態只要一步就到原點的軌跡. . . 40 圖4.4 控制器u[0]、u[1]所能旋轉的角度. . . 41 圖4.5 拖車系統的狀態只要兩步就到原點的軌跡. . . 42 圖 4.6 當不考慮雜訊時,拖車系統狀態x1[k]之軌跡圖. . . 46 圖 4.7 當不考慮雜訊時,拖車系統狀態x2[k]之軌跡圖. . . 46 圖 4.8 當不考慮雜訊時,拖車系統狀態x3[k]之軌跡圖. . . 47 圖4.9 當不考慮雜訊時,控制器u[k]之軌跡圖. . . 47 圖 4.10 當不考慮雜訊時,順滑變數s[k]之軌跡圖. . . 48 圖 4.11 當不考慮雜訊時,拖車實際運作之軌跡圖. . . 49 圖4.12 當不考慮雜訊且初始值遠離(0,0,0)時,拖車系統狀態x1[k]之軌跡圖. . . 50 圖4.13 當不考慮雜訊且初始值遠離(0,0,0)時,拖車系統狀態x2[k]之軌跡圖. . 50 圖4.14 當不考慮雜訊且初始值遠離(0,0,0)時,拖車系統狀態x3[k]之軌跡圖. . 51 圖4.15 當不考慮雜訊且初始值遠離(0,0,0)時,控制器u[k]之軌跡圖. . . 51 圖 4.16 當不考慮雜訊且初始值遠離(0,0,0)時,順滑變數s[k]之軌跡圖. . . 52 圖4.17 當不考慮雜訊且初始值遠離(0,0,0)時,拖車實際運作之軌跡圖. . . 52 圖 4.18 當系統軌跡上順滑面之後,整個拖車系統的固定點. . . 54 圖4.19 拖車系統在順滑變數s[k]=0時之整個狀態空間的收斂區間估計. . . 57 圖4.20 想要的順滑變數sd[k]之軌跡圖. . . 58
圖 4.21 收斂區間估計Ω 、0 Ω 、1 Ω 以及2 Ω 之圖形. . . 61 3 圖4.22 收斂區間估計Ω0、Ω1、Ω 以及2 Ω 投影在3 x −1 x2平面之圖形. . . 62 圖4.23 收斂區間估計Ω0、Ω1、Ω 以及2 Ω 投影在3 x −1 x3平面之圖形. . . 62 圖 4.24 收斂區間估計Ω 、0 Ω 、1 Ω 以及2 Ω 投影在3 x −2 x3平面之圖形. . . 63 圖4.25 當不考慮雜訊且初始值不在Ω 內時,拖車系統狀態3 x1[k]之軌跡圖. . . . 64 圖4.26 當不考慮雜訊且初始值不在Ω 內時,拖車系統狀態3 x2[k]之軌跡圖. . . 64 圖 4.27 當不考慮雜訊且初始值不在Ω 內時,拖車系統狀態3 x3[k]之軌跡圖. . . 65 圖4.28 當不考慮雜訊且初始值不在Ω 內時,控制器3 u[k]之軌跡圖. . . .65 圖4.29 當不考慮雜訊且初始值不在Ω 內時,順滑變數3 s[k]之軌跡圖. . . 66 圖4.30 當不考慮雜訊且初始值不在Ω 內時,拖車實際運作之軌跡圖. . . 66 3 圖4.31 當考慮雜訊時,拖車系統狀態x1[k]之軌跡圖. . . 68 圖4.32 當考慮雜訊時,拖車系統狀態x2[k]之軌跡圖. . . 69 圖4.33 當考慮雜訊時,拖車系統狀態x3[k]之軌跡圖. . . 69 圖4.34 當考慮雜訊時,控制器u[k]之軌跡圖. . . 70 圖4.35 當考慮雜訊時,順滑變數s[k]之軌跡圖. . . 71
CHAPTER 1
緒論
緒論
緒論
緒論
1.1 研究背景
研究背景
研究背景
研究背景
順滑模態(sliding mode)是屬於可變結構系統(Variable Structure System,VSS) 的一種特殊行為[1]。顧名思義,所謂的可變結構系統是一種結構可以改變的系 統,這類系統當然就應該包含兩個以上的子結構,還應該具備某些特定的切換條 件(switch condition),去決定在何種情況之下,系統所必須呈現出何種的子結構, 才能達成我們所希望設計的目的。也就是意謂著,可變結構應該具備兩個以上的 子結構及一些刻意加入的切換條件[1]。其發展的起源可以追溯到 1950 年代,前 蘇聯的一批學者與工程師們將可變結構系統的技術應用於馬達控制上,在那時他 們已經注意到一個非常重要的特性-順滑模態,藉由此特性進而去達成控制的目 的。其中,學者 V. I. Utkin 在 1970 年代,所發表關於可變結構系統的設計與分 析[2],以及探討順滑模態的理論與應用[3]等相關著作,成為日後學者研究與設 計的重要參考。傳統連續型的順滑模態控制,其設計的步驟主要如下[2]:首先先
建立一穩定的順滑函數(sliding function)。接著根據順滑條件(sliding condition), 以不連續 的控制 輸入 來保證順 滑模態 存在 於狀態空 間之中 的超 平面 (hyper plane),此超平面又被稱之為順滑面(sliding plane)。最後基於迫近條件(approach condition),控制輸入必須能夠將所有的狀態控制在順滑面上。其中順滑模態控 制的優點是響應快速、良好的暫態性能以及對於系統不定值(uncertainties)與外部 干擾(disturbances)具有某種程度的穩健性(rboustness)。 同時隨著晶片製造技術的日益提升,帶動了微處理器的低價與廣泛運用,於是 離散型(discrete)滑模系統理論與控制器的設計逐漸成為工程研究的重點。一開始 被提出的離散型滑模控制是透過簡單的等效轉換,將連續型滑模的充要條件直接 轉換成為差分不等式的離散型滑模條件[4]。Milosavljevic 認為將切換法則或狀態 誤差做離散化處理之後,配合上述的的離散型滑模條件,幾乎無法得到理想的順 滑模態,而是成為所謂的類滑模(Quasi-Sliding Mode,QSM)[5];Milosavljevic 雖 然有提到迫近條件的重要,不過卻未能進一步說明。Sarpturk 等學者則指出上述 離散型滑模條件的不足並加以修正[6],同時又提出控制輸入必須要有上、下邊 界值,以確保系統軌跡的收斂與穩定。Furuta 則是採用離散 Lyapunov function 的 方式去獲得一離散型滑模條件[7]以期達到漸近穩定(asymptotically stable),並且 利用切換區(switching region)內外不同的回授增益做為切換條件,來對抗系統的 不定值。Spurgeon 強調在有限範圍不定值(bounded uncertainties)的前提下,簡單 的線性控制搭配適當的順滑面,將會比複雜的非線性控制搭配不合適的順滑面有 著更好的效能表現[8]。W. Gao 等人[12]則是將離散型滑模系統軌跡分成三種模 式 , 定 義 該 軌 跡 必 須 同 時 符 合 三 項 特 性 , 並 提 出 新 的 迫 近 條 件 來 彌 補 Milosavljevic、Sarpturk 以及 Furuta 等人所提出離散滑模條件的不足,確保系統 軌跡能在有限的時間內進入類滑模帶(Quasi-Sliding Mode Band,QSMB),並且在 接下來的每個取樣時間點以一之字形的移動(zigzagging motion)來回的穿越過順 滑面,並且維持在類滑模帶內。在文獻[9]中,Bartoszewicz 則是重新制定了類滑 模的定義,並提出了另一迫近條件,使得系統軌跡去對想要的順滑變數軌跡去做
追蹤(tracking)的動作。 我們都知道順滑模態控制擁有許多優點,因此它可以廣泛的運用在各式各樣的 系統中[9-14],在業界,由於數位電腦技術的蓬勃發展,所以針對一離散系統的 滑模控制,它所扮演的角色逐漸變的越來越重要,而且近年來也引起了學術界的 各方注意[9,11-14]。針對一離散系統,由於有限的取樣時間,所以當系統遭受到 額外的干擾時,系統軌跡只會在順滑面附近擾動,而不是整個維持在順滑面上, 因此被稱為類滑模(quasi-sliding mode)的概念[9,12,14]將會被介紹以及深入的探 討。對於ㄧ實際系統,非線性現象廣泛存在於自然界中,線性行為只是在平衡狀 態附近的近似結果,而實際的機械系統、電子系統、通信系統、自動控制系統、 電力系統中都存在著各種非線性因素,如電場力、磁場力、電子元件的非線性特 性等等,因此工程實際中的系統絕大多數都是非線性系統。在許多情況下,線性 理論不能解釋出非線性系統中複雜的物理現象,而這些實際現象在現代工程技術 中卻愈來愈頻繁地出現,假如想切實分析和有效地解決一些有一定難度的科學和 技術問題,又想迴避非線性科學、迴避非線性現象,而僅僅限於線性方法與線性 思維肯定是不可能的了。
1.2 研究動機
研究動機
研究動機
研究動機
針對離散非線性系統的控制器設計,在這近年來,已經有許多的方法被提出 ,其中最普及的方法就是模糊控制(fuzzy control),當受控系統頗複雜時,先去建 構整個 T-S(Takagi-Sugeno)模糊模型[15],再去設計此模糊控制器。此控制器可以 提供一個有效率且簡單的控制法則,去控制整個非線性系統,然後達成我們所希 望的控制目的。但是對整個原始非線性系統而言,T-S 模糊模型跟原始的系統之 間仍然會有些許誤差,而且當模糊控制器應用在原始的系統時,若面臨到一些額 外的干擾雜訊,可能會使得系統性能並不能完全符合我們的需求。因此我們想要 直接對最原始的離散非線性系統去分析,另外也考量了雜訊的干擾,接著採用類滑模控制的概念[9],進而去設計我們的控制器,此控制器不僅僅能使得系統可 以達到我們所希望的性能,並且還具備了順滑模態控制的優點。
1.3 論文架構
論文架構
論文架構
論文架構
此篇論文最主要是探討一離散非線性系統的類滑模控制,先決定出ㄧ穩定的順 滑面之後,接著再採用 Bartoszewicz 所提出的迫近條件去設計此類滑模控制器, 此控制器不但能達成我們所要求的性能,此外還具備了順滑模態控制的優點。在 第二章中,我們最主要是介紹類滑模相關之定義。在第三章中,我們則是針對一 離散非線性系統,提供了三種方法去設計穩定的順滑面,也提出了兩種類滑模控 制器,各別為非線性迫近控制器以及修正型非線性迫近控制器。其中也有證明當 雜訊變化的不激烈時,修正型非線性迫近控制器的類滑模帶寬比非線性迫近控制 器的類滑模帶寬更小,所以修正型非線性迫近控制器具備了更好的穩健性。在第 四章中,我們針對離散化之後的拖車系統,探討其固定點(fixed point)以及收斂區 間(domain of attraction)之估計。最後將模糊控制器[22]以及類滑模控制器去做比 較以及分析,並將兩種類滑模控制器模擬的結果與第三章的理論做個對應。最後 在第五章,則是對此篇論文做一個總結以及提供一些未來可研究之方向。
CHAPTER 2
預備知識
預備知識
預備知識
預備知識
2.1 離散型滑模控制
離散型滑模控制
離散型滑模控制
離散型滑模控制(discrete-time sliding mode control)條件
條件
條件
條件
初期的離散型滑模控制是認為直接修改連續型滑模(continuous-time sliding mode)存在的充要條件(sufficient and necessary condition)[2],
lim
0
0<
→s
s
s&
(2-1) 用來當作離散型滑模存在的充要條件。然後從(2-1)式中,我們可以直接推得離散 型滑模條件[5],如(2-2)式所示: s[k]⋅[
s[k+1]−s[k]]
<0 (2-2) 但 Milosavljevic 在文獻[5]中提出,將系統做離散化之後,配合條件(2-2)幾乎無法得到理想的順滑模態,而是呈現所謂的類滑模(quasi sliding mode)。所謂的類 滑模有別於連續型滑模,主要是因為離散系統的控制只能在取樣點上發生作用, 對於在兩取樣點之間的時段則無法掌控,所以在這個時段即使不探討雜訊的作 用,系統的軌跡也會因為控制能力與系統實際情況不匹配,以至於使得系統軌跡 幾乎無法維持在順滑面上,而是在順滑面的附近移動,這種現象就被稱之為類滑 模。Milosavljevic 也指出條件(2-2)拿來當作離散系統的滑模條件時,會有明顯不 足的地方,如圖 2.1 所示,系統軌跡可能會呈現震盪發散的情況[5]。 圖 2.1 採用離散型滑模條件(2-2)時,順滑變數s[k]可能呈現之軌跡圖 針對上述所提的離散順滑模態條件的不足,Sarpturk 等學者又提出了以下的修 正條件[6],
] [ ] 1 [k s k s + < (2-3) 進而我們也可以得到(2-3)式之等效式,如(2-4)式所示,
[
]
[
[ 1] [ ]]
sgn( [ ]) 0 0 ]) [ sgn( ] [ ] 1 [ > ⋅ + + < ⋅ − + k s k s k s k s k s k s (2-4)至於 Furuta 則是採用離散 Lyapunov function 的方法去獲得一離散滑模條件[7],
對此定義 Lyapunov function 為
[ ]
2 ] [ 2 1 : ] [k s k V = ,Furuta 則提出了以下的離散滑模 條件, 2 ]) 1 [ ( 2 1 ] 1 [ ] [k ⋅∆s k+ <− ∆s k+ s (2-5) 其中∆s[k+1]=s[k+1]−s[k] 將(2-5)式進一步整理則可以得到如下(2-6)式,[
] [ ]
2 2 ] [ ] 1 [k s k s + < (2-6) 這也意謂著, V[k+1]<V[k] (2-7) 針對條件(2-3)以及條件(2-5),此兩種條件的結果是相同的。所以不管是(2-3) 式或是(2-5)式皆能保證收斂,但這兩種條件只限定在於順滑面附近,否則系統軌跡可能會有這兩種現象: (1)軌跡會以極緩慢的收斂速度往順滑面逼近。 (2)軌跡也可能會延著順滑面不斷的來回切跳。 此兩種現象各別如圖 2.2(a)與圖 2.2(b)所示,換句話說,也就是(2-3)式以及(2-5) 式皆無法當作適當的迫近條件。 (a) (b) 圖 2.2 離散型滑模條件(2-3)式以及(2-5)式之軌跡收斂圖 實際上,迫近條件可以分成兩個部份來探討: (1)往順滑面迫近的方向條件。 (2)系統軌跡與順滑面之間的距離遞減條件。 條件(2-2)以及條件(2-3)都有符合方向條件,也就是系統軌跡都有往順滑面迫近。
然而,條件(2-2)卻有可能違反了系統軌跡與順滑面之間的距離遞減條件,最後導 致軌跡發散。條件(2-3)雖然有符合系統軌跡與順滑面之間的距離遞減條件,卻因 為未將遞減速率納入考量,所以以至於到達順滑面的時間無法保證。 為了使系統軌跡不至於如上述般緩慢的收斂,因此 Gao 在文獻[12]中,提出下 列迫近條件, ]) [ sgn( ] [ ) 1 ( ] 1 [k q T s k T s k s + = − ⋅ ⋅ −ε⋅ ⋅ (2-8) 其中q>0,ε >0,1− Tq⋅ >0,T為取樣時間。 從(2-8)式中,我們可自行選取q、T和ε,來達到我們所想要的收斂速度,從此 式中,我們也可以看出此迫近條件有符合方向條件以及距離遞減條件。對此, Bartoszewicz 也提出了另一迫近條件[9], ] 1 [ ] 1 [k+ =s k+ s d (2-9) 針對此迫近條件,是事先預設一想要的順滑變數軌跡sd[k],再根據此迫近條件 (2-9)去使得系統軌跡s[k]去對sd[k]做追蹤(tracking)的動作。所以我們可以根據 自己所需要的要求去設計sd[k],進而得到我們所想要的順滑變數軌跡s[k]。
2.2 離散型滑模控制特性
離散型滑模控制特性
離散型滑模控制特性
離散型滑模控制特性
首先我們考慮單輸入的連續系統, x&=A⋅x+b⋅u (2-10)在這裡, ∈ℜn x 是系統狀態向量,u∈ℜ1是控制輸入,A以及b都是有著適當維 度的矩陣。我們知道要完成一個順滑模態的控制器,通常包含下列兩個步驟: 步驟 1:決定順滑函數s(x),使得系統軌跡在順滑面 s(x)=0 (2-11) 上是穩定的。 步驟 2:決定控制法則 = − + ) ( ) ( ) ( x x x u u u , , 0 ) ( 0 ) ( < > x x s s (2-12) 使得迫近條件ss&<−σ⋅s [16]能夠被滿足,根據此迫近條件,這也說明 系統的狀態不管初始值在哪,系統軌跡都會往順滑面的方向前進,並 且在有限的時間內到達順滑面。 ㄧ個順滑模態控制的系統響應,一般來說包含三種模式,各別為到達模態 (Reaching Mode,RM)、順滑模態(Sliding Mode,SM)、穩態模態(Steady-state Mode,SS)[12],如圖 2.3(以二階系統為例)所示:
圖 2.3 連續順滑模態控制之系統軌跡 接下來我們考慮單輸入的離散系統, x[k+1]=A⋅x[k]+b⋅u[k] (2-13) 在這裡, [k]∈ℜn x 是系統狀態向量,u[k]∈ℜ1是控制輸入,A以及b 都是有著 適當維度的矩陣。當一離散滑模控制應用在系統(2-13)時,也可以將整個系統響 應分成到達模態、順滑模態以及穩態模態三種[12]。然後由於離散型的順滑模態 控制特性與連續型的有所不同,所以在實際的情況下,根據 Gao 所提出的定義, 系統軌跡在往順滑面迫近時,很少會剛好落在順滑面上,因此離散滑模控制系統
的順滑面又被之稱為理想順滑面。所以針對離散滑模控制系統,我們可將系統軌 跡分成兩種情況來討論。 第一種是理想的系統軌跡,如圖 2.4(以二階系統為例)所示。如果我們希望系 統軌跡能如圖 2.4 所描述的ㄧ樣,則必須要符合此兩種條件[12]: (1)系統軌跡在切換的時候,它必須能夠正確的落在順滑面上。 (2)當系統軌跡上了順滑面之後,必須使得系統軌跡能夠ㄧ直保持在順滑面 上。 但是在實際的應用中,這兩種條件是很難被達成的。 圖 2.4 理想的離散順滑模態控制之系統軌跡
第二種則是實際的系統軌跡,如圖 2.5(以二階系統為例)所示。從圖 2.5 中, 我們得知實際系統的軌跡在切換時,很少會剛好落在順滑面上,而是在順滑面的 附近以之字形的方式移動。 圖 2.5 實際的離散順滑模態控制之系統軌跡 經由上述之討論,Gao 則是認為離散滑模控制系統應該具備下列三種特性[12]: 特性 1:對於任意的初始值,系統軌跡將會單調地往順滑面迫近,並且穿越過 順滑面。 特性 2:一但系統軌跡穿越過順滑面之後,在接下來的每個取樣時間點,它將
會不斷的來回穿越順滑面,並且在順滑面附近形成一之字形的移動。 特性 3:這一之字形的軌跡到順滑面之間的距離將不會再增加,而是會保持在 一個明確的範圍裡。
2.3 類滑模之定義
類滑模之定義
類滑模之定義
類滑模之定義
針對單輸入離散線性系統(2-13),在此介紹一些類滑模相關定義。在文獻[12] 中,Gao 提出了下列類滑模的定義: 定義 1:只要離散順滑模態控制的系統軌跡能夠滿足特性 2 以及特性 3 就被稱 之為類滑模(Quasi-Sliding Mode,QSM),在特性 3 中,這一之字形的 軌跡到順滑面之間的大小又被稱之為類滑模帶(Quasi-Sliding Mode Band,QSMB),並且定義如下, −∆<s x( k[ ])<+∆ (2-14) 其中2∆為類滑模帶的寬度。 定義 2:在(2-14)式中,當∆=0時,類滑模又可被稱之為理想類滑模(Ideal Quasi-Sliding Mode,IQSM)。 定義 3:當系統軌跡滿足特性 1、特性 2 以及特性 3 時,可以說此離散順滑模 態控制系統滿足了迫近條件。 然而在文獻[9]中,Bartoszewicz 又重新定義了類滑模的觀念,最主要不同的地 方就是在 Gao 原本的定義中,系統軌跡必須要穿越過順滑面,並且在接下來的 每個取樣時間點,它要能夠不斷的來回穿越過順滑面,並且在順滑面附近造成一 之字形的移動。然而 Bartoszewicz 則是提出系統軌跡並不一定要來回的穿越過順 滑面,但是若系統由於雜訊的影響,而使得系統軌跡穿越過了順滑面是允許的,只需讓系統軌跡與順滑面之間的距離能夠維持在一個範圍內即可,接下來介紹類 滑模新的定義[9]: 定義 4:當系統(2-13)遭受到系統不定值以及外部干擾的影響時,系統軌跡會 ㄧ直保持在順滑面附近,使得系統軌跡滿足 s( kx[ ]) ≤ε (2-15) 其中ε是一個正的常數,也被稱之為類滑模帶寬(quasi-sliding-mode band width)。 我們知道此定義跟文獻[12]中所提出的定義是不同的,因為系統軌跡 並不要求一定要來回的穿越過順滑面,所以相較之下,我們可以避免 切跳(chattering)現象,並且降低控制器所需要消耗的能量,而能更進 一步的改善類滑模控制的性能。 定義 5:我們可以說此系統有滿足類滑模的迫近條件,只要當k≥0時,系統有 滿足下列條件即可, ε ε ε ε ε ε ≤ + ⇒ ≤ ≤ + < ⇒ − < < + ≤ − ⇒ > ] 1 [ ] [ ] 1 [ ] [ ] [ ] [ ] 1 [ ] [ k s k s k s k s k s k s k s k s (2-16) 在第三章中我們會藉由 Bartoszewicz 所提出的迫近條件,針對離散非線性系 統,去設計出類滑模控制器。
2.4 Schur complement
在許多的控制問題中,我們通常會利用 Schur 分解的性質,將那些線性矩陣不等式轉換成為另ㄧ線性矩陣不等式去分析。所以對於ㄧ給定的對稱矩陣F,其中 n n F∈ℜ × ,我們可將F分解為 = 22 21 12 11 F F F F F (2-17) 其中 r r F11∈ℜ× , T n r r F F21= 12∈ℜ( − )× , ( )( ) 22 r n r n F ∈ℜ − × − ,r < n 我們可以得知下列的三個條件是等價的[17]。 F <0 (2-18) F11<0 ,F22−F12T ⋅F11−1⋅F12<0 (2-19) 0 , 0 11 12 221 12 22 < − ⋅ ⋅ < − T F F F F F (2-20) 證明:條件(2-18) ⇔ 條件(2-19) 由於F 為對稱矩陣,所以經由計算我們可以得到 ⋅ ⋅ − = ⋅ − ⋅ − − − − 12 1 11 21 22 11 1 11 21 22 21 12 11 1 11 21 0 0 0 0 F F F F F F F F F F F F F T I I I I 其中I為單位矩陣(identity matrix) 因此我們可以得知
0 0 0 0 1 11 21 22 21 12 11 1 11 21 < ⋅ − ⋅ − ⇔ < − − T F F F F F F F F F I I I I 0 0 0 12 1 11 21 22 11 < ⋅ ⋅ − ⇔ − F F F F F ⇔F11 <0 ,F22 −F12T ⋅F11−1⋅F12 <0 所以證明條件(2-18)以及條件(2-19)為對等的。 證明:條件(2-18) ⇔ 條件(2-20) 經由計算我們也可以得到 − ⋅ ⋅ = − ⋅ − ⋅ − − − 22 21 1 22 12 11 1 22 12 22 21 12 11 1 22 12 0 0 0 0 F F F F F F F F F F F F F T I I I I 因此我們可以得知 0 0 0 0 1 22 12 22 21 12 11 1 22 12 < − ⋅ − ⋅ ⇔ < − − T F F F F F F F F F I I I I 0 0 0 22 21 1 22 12 11 < − ⋅ ⋅ ⇔ − F F F F F ⇔F22<0, F11−F12⋅F22−1⋅F12T <0
CHAPTER 3
針對離散非線性系統之類滑模
針對離散非線性系統之類滑模
針對離散非線性系統之類滑模
針對離散非線性系統之類滑模
(Quasi-Sliding Mode,
,
,
,QSM)控制
控制
控制
控制
3.1 系統描述
系統描述
系統描述
系統描述
考慮一離散非線性系統,如下所示: ] [ ] [ ]) [ ], [ ( ]) [ ], [ ( ] 1 [ ]) [ ], [ ( ] 1 [ 2 1 2 1 2 2 2 1 1 1 k k k k G k k k k k k d u x x x x f x x x f x + ⋅ + = + = + (3-1) 在這裡, [ ] 1 1 n k ∈ℜ x 和 [ ] 2 2 n k ∈ℜ x 是系統狀態向量,u[k]∈ℜn2是控制輸入向量, 2 ] [k ∈ℜn d 是干擾雜訊,f1(x1[k x], 2[k])、f2(x1[k x], 2[k])、G(x1[k],x2[k])都是有 著適當維度的平滑函數(smooth function),此外還必須滿足f1(0,0)=0以及 0 0 0 f2( , )= 。在這裡,我們說一個向量a=
(
a L1 an)
T ≥0,意即表示向量 a 中的每 一個分量ai ≥0。對於系統(3-1)的分析,我們擬定了下列的假設:
假設一:對於所有的狀態向量,G(x1[k],x2[k])是一個非奇異矩陣(nonsingular
matrix)。
假設二:存在一個函數x2[k]=φ(x1[k])且滿足φ(0)=0,使得降階系統(reduced
order system)x1[k+1]=f1(x1[k],φ(x1[k]))(i.e.,s[k]≡0)的原點是漸近 穩定(Asymptotically Stable,AS)。
假設三:dl ≤d[k]≤du,其中d 和l d 都是常數向量,並且u d 和l d 各別代表了 u
] [k
d 的下限(lower bound)與上限(upper bound)。
3.2 順滑面之選取
順滑面之選取
順滑面之選取
順滑面之選取
在設計順滑面時,先不考慮d[k]之影響,因此主要探討的系統如(3-2)式, ] [ ]) [ ], [ ( ]) [ ], [ ( ] 1 [ ]) [ ], [ ( ] 1 [ 2 1 2 1 2 2 2 1 1 1 k k k G k k k k k k u x x x x f x x x f x ⋅ + = + = + (3-2) 對此系統,首先我們選取一個順滑面, s[k]=x2[k]−φ(x1[k]) (3-3) 當系統軌跡上順滑面之後,從理想類滑模控制[12]中,我們知道它必須滿足下式, s[k+1]u=u =s[k]=0 eq ,k =0,1,2,L (3-4) 從(3-2)式、(3-3)式以及(3-4)式中,我們可以推得
x2[k+1]− (x1[k+1])u=u =s[k]=0 eq φ (3-5) ⇒f2(x1[k],x2[k])+G(x1[k],x2[k])⋅ueq[k]−φ(f1(x1[k],x2[k]))=0 (3-6) 接著從(3-6)式中,我們得知等效控制(equivalent control)ueq如(3-7)式所示: ueq[k]=G−1(x1[k],x2[k])⋅
(
φ(f1(x1[k],x2[k]))−f2(x1[k],x2[k]))
(3-7) 再將(3-7)式代回(3-2)式,我們可以得到 0 s x x f x = + = + ] 1 [ ])) [ ( ], [ ( ] 1 [ 1 1 1 1 k k k k φ (3-8) 從(3-8)式中,我們可以很清楚的得知,當系統軌跡上順滑面之後,可以將整個系 統(3-2)視為一個降階系統x1[k+1]=f1(x1[k],φ(x1[k])),因此只要符合假設二,(3-3) 式即為一個穩定的順滑面。至於針對離散非線性系統,要如何去選取一穩定的順 滑面呢(i.e.,方程式(3-3)中選取φ)?在下面有整理了三個方法。3.2.1 狀態回授
狀態回授
狀態回授法
狀態回授
法
法
法(state feedback)
在這我們是探討降階系統的線性部分,然後我們對x1[k+1]=f1(x1[k],x2[k])在 原點做線性化,並且我們將x2[k]視為控制輸入,因此我們可以得到線性化後的 模型,如同(3-9)式: x1[k+1]=E⋅x1[k]+F⋅x2[k] (3-9)
其中 ) , ( ) , ( 1 1 2 1x 00 x x f = ∂ ∂ = E ,E∈ℜn1×n1 ) , ( ) , ( 2 1 2 1x 00 x x f = ∂ ∂ = F ,F∈ℜn1×n2 接著對系統(3-9)採用狀態回授法[24]去設計,因此我們令 x2[k]=−Κ⋅x1[k] (3-10) 其中Κ∈ℜn2×n1 再將(3-10)式代入(3-9)式,我們可以得到整個動態如下所示: x1[k+1]=(E−F⋅Κ)⋅x1[k] (3-11) 因此我們可以設計Κ ,只要讓(E− F⋅Κ)的特徵值皆有在單位圓內,則整個動態 (3-11)是穩定的,也就是在選取φ(x1[k])=−Κ⋅x1[k]時,降階系統x1[k+ ]1 = ]) [ ( ], [ ( 1 1 1 x k x k
f φ 之原點為局部漸近穩定(local asymptotically stable),因此(3-10)
式提供一穩定的順滑面之設計如下:
s[k]=x2[k]+Κ⋅x1[k] (3-12)
3.2.2 線
線
線性二次調節器
線
性二次調節器
性二次調節器法
性二次調節器
法
法(Linear Quadratic Regulator,
法
,
,LQR)
,
為了使降階系統的性能能達到最佳化,因此我們要採用 LQR 的方法去設計順 滑面。在這我們也是探討降階系統的線性部分,接著我們將針對系統(3-9)去探討
其 LQR 的問題,現在考慮一成本函數(cost function)如(3-13)式所示: [ ] 1[ ] 2[ ] 2[ ] 0 1 k Q k k R k J T k T x x x x ⋅ ⋅ + ⋅ ⋅ =
∑
∞ = (3-13) 其中Q≥0,R>0 針對系統(3-9)在(3-13)式的成本函數下,其最佳控制(optimal control)[18]如下, [ ] ( ) 1 1[ ] 2 k R F P F F P E k T T x x =− + ⋅ ⋅ − ⋅ ⋅ ⋅ ⋅ (3-14) 其中P為(3-15)式的解, P=Q+ET ⋅P⋅E−ET⋅P⋅F⋅(R+FT⋅P⋅F)−1⋅FT⋅P⋅E (3-15) 我們也得知(3-14)式提供一穩定的順滑面之設計如下: [ ] [ ] ( ) 1 1[ ] 2 k R F P F F P E k k s T T x x + + ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ = − (3-16)3.2.3 線性矩陣不等式
線性矩陣不等式
線性矩陣不等式法
線性矩陣不等式
法
法(Linear Matrix Inequality
法
,LMI)
3.2.1 與 3.2.2 節中所提到的兩種方法,最主要是針對降階系統x1[k+ ]1 = ]) [ ], [ ( 1 2 1 x k x k f 的線性化部分設計順滑面,所以系統(3-9)只討論降階系統在固定
點(fixed point)附近的線性行為,因此在這我們要藉由 Sector nonlinearity[19]的理 論,針對一離散非線性系統去建構整個 T-S 模糊模型,然後藉由文獻[20]中所描 述的方法,去設計出穩定的順滑面。在此特別註明,當系統狀態在某特定範圍內, 此 T-S 模糊模型與原始的非線性系統是一致的,也就是此兩種模型之間沒有誤
差。在此我們要討論的降階系統必須符合下列型式: x1[k+1]=g(x1[k])+h(x1[k])⋅x2[k] (3-17) 在這裡, [ ] 1 1 n k ∈ℜ x 是系統狀態向量, [ ] 2 2 n k ∈ℜ x 視為控制輸入向量,g(x1[k])、 ]) [ (x1 k h 都是有著適當維度的平滑函數。 系統(3-17)可以藉由下列的 T-S 模糊模型去表示, Ri : l i k B k A k F k x F k x i i i n n i , , 2 , 1 , ] [ ] [ ] 1 [ then , is ] [ and and is ] [ if 2 1 1 1 1 11 1 1 L K = ⋅ + ⋅ = + x x x (3-18) 其中Fji(j=1,L,n1)是一個模糊集合,x1j(j=1,L,n1)則為x1[k]的第 j 個狀態,l 是 T-S 模糊模型的規則數,R 則是表示模糊系統的第i i個規則, i i B A, 則是 T-S 模糊模型各別所對應到的矩陣。在此特別註明,l的個數主要取決於g(x1[k])以及 ]) [ (x1 k h 中的非線性項個數。 對於系統(3-17),我們可以建構整個 T-S 模糊模型如下所示, ]) [ ] [ ( ]) [ ( ]) [ x ( ]) [ ] [ ( ]) [ ( ] 1 [ 2 1 1 1 1 1 2 1 1 1 1 k B k A k k k B k A k k i i l i i l i i i i l i i x x x x x x x ⋅ + ⋅ ⋅ = ⋅ + ⋅ ⋅ = +
∑
∑
∑
= = = µ ω ω (3-19) 其中 ( [ ]) ( 1 [ ]) 1 1 1 k x F k n ji j j i x =Π
= ω]) [ ( ]) [ ( ]) [ ( 1 1 1 1
∑
= = l i i i i k k k x x x ω ω µ 因為ωi(x1[k])≥0 , ( [ ]) 0 1 1 ≥∑
= l i i x k ω 所以我們可以得到下式, 0<µi(x1[k])≤1, ( [ ]) 1 1 1 =∑
= l i i x k µ (3-20) 從(3-20)式中,我們可以推得∑
≠ = − = l j i i i j x k x k ) ( 1 1 1[ ]) 1 ( [ ]) ( µ µ (3-21) 再將(3-21)式代入 T-S 模糊模型(3-19)中,我們可以整理出另一 T-S 模糊模型的型 式,如下所示: ] [ ] ]) [ ( ]) [ ( [ ] [ ] ]) [ ( ]) [ ( [ ] 1 [ 2 ) ( 1 1 1 1 ) ( 1 1 1 1 k B K B k k A k A k k l j i i i i j j l j i i i i j j x x x x x x x ⋅ ⋅ + ⋅ + ⋅ ⋅ + ⋅ = +∑
∑
≠ = ≠ = µ µ µ µ ⇒ ] [ ] ]) [ ( ])) [ ( 1 ( [ ] [ ] ]) [ ( ])) [ ( 1 [( ] 1 [ 2 ) ( 1 1 ) ( 1 1 1 ) ( 1 1 ) ( 1 1 1 k B K B k x k A k A k x k l j i i i i j l j i i i l j i i i i j l j i i i x x x x x ⋅ ⋅ + ⋅ − + ⋅ ⋅ + ⋅ − = +∑
∑
∑
∑
≠ = ≠ = ≠ = ≠ = µ µ µ µ⇒ ] [ ] ) ( ]) [ ( [ ] [ ] ) ( ]) [ ( [ ] 1 [ 2 ) ( 1 1 1 ) ( 1 1 1 k B B K B k A A k A k l j i i j i i j l j i i j i i j x x x x x ⋅ − ⋅ + + ⋅ − ⋅ + = +
∑
∑
≠ = ≠ = µ µ (3-22) 在這,我們定義A = Aj,∑
≠ = − = ∆ l j i i j i i k A A A ) ( 1 1[ ])( ) x ( µ B =Bj,∑
≠ = − = ∆ l j i i j i i k B B B ) ( 1 1[ ])( ) x ( µ 因此最後所建立的 T-S 模糊模型如下, x1[k+1]=(A+∆A)⋅x1[k]+(B+∆B)⋅x2[k] (3-23) 然後我們取 x2[k]=Γ⋅x1[k] (3-24) 其中Γ∈ℜn ×2 n1 然後將(3-24)式代入系統(3-23),我們可以得到系統(3-25), x1[k+1]=(A+∆A)⋅x1[k]+(B+∆B)⋅Γ⋅x1[k] (3-25) 針對系統(3-25),接下來我們要藉由 LMI 的方法,設計 Γ 使得系統(3-25)是穩 定的,在此必須要先符合下列假設: 假設 4:( A , B )是可控的(controllable)。 假設 5:∆A=D⋅F[k]⋅E1,∆B =D⋅F[k]⋅E2,其中 D 、E 、1 E 是已知的常 2 數矩陣,F[k]是一個未知的矩陣函數,並且滿足FT[k]⋅F[k]≤I。其中I為單位矩陣(identity matrix) 對於系統(3-25) ,當假設 4 以及假設 5 有符合,則整個系統的穩定性可被下面所 提出的不等式 1 來做總結。 不等式 1:如果存在一個正定的對稱矩陣P,某矩陣W和某純量γ ,使得下列 線性矩陣不等式(3-26)有被滿足,則系統(3-25)是漸近穩定的。 0 I 0 0 0 I 0 0 0 ) ( ) ( 2 1 2 1 < ⋅ − ⋅ ⋅ − ⋅ + ⋅ ⋅ Χ − ⋅ + Χ ⋅ ⋅ + ⋅ ⋅ + Χ ⋅ Χ − γ γ γ γ T T T D W E X E D W B A W E X E W B A (3-26) 其中Χ P ,= −1 W =Γ⋅P−1 針對不等式 1,接下來我們要去證明當不等式(3-26)成立時,系統的漸近穩定是 可被保證的,在此我們先探討定理 1[21]。 定理 1:給定常數矩陣D、E以及有著適當維度的對稱常數矩陣Y,下列不等 式(3-27)是成立的, 0 I ] [ , 0 some for ] [ ] [ where , 0 1 1 < ⋅ ⋅ ⋅ ⋅ + > ≤ ⋅ < ⋅ ⋅ + ⋅ ⋅ + − − T T T T T T D E R D E Y R k F k F D F E E F D Y γ γ γ γ γ 0 0 c (3-27)
現在我們考慮一 Lyapunov function candidate
其中P為一正定的對稱矩陣 此 Lyapunov function(3-28)的變化為 V[k+1]−V[k]=x1T[k+1]⋅P⋅x1[k+1]−xT1[k]⋅P⋅x1[k] (3-29) 然後將(3-25)式代入(3-29)式中,我們可以得到 Lyapunov function 的變化為 ] [ x ] [ x -] [ x ) ( ) ( ] [ x ] [ ] 1 [ 1 1 1 1 k P k k B A B A P B A B A k k V k V T T T ⋅ ⋅ ⋅ Γ ⋅ ∆ + ∆ + Γ ⋅ + ⋅ ⋅ Γ ⋅ ∆ + ∆ + Γ ⋅ + ⋅ = − + (3-30) 若當k≥0時,只要對於任意的x1[k ,(3-30)式是負定,則系統(3-25)在原點是漸] 近穩定的,因此下列不等式成立, (A+B⋅Γ+∆A+∆B⋅Γ)T⋅P⋅(A+B⋅Γ+∆A+∆B⋅Γ)−P<0 (3-31) 將假設 5 的條件代入不等式(3-31)中,我們可以得到下列不等式(3-32), 0 ) ] [ ] [ ( ) ] [ ] [ ( 2 1 2 1 < − Γ ⋅ ⋅ ⋅ + ⋅ ⋅ + Γ ⋅ + ⋅ ⋅ Γ ⋅ ⋅ ⋅ + ⋅ ⋅ + Γ ⋅ + P E k F D E k F D B A P E k F D E k F D B A T (3-32) 再藉由 schur complement 的概念,我們可將不等式(3-32)等效為
0 ] [ ] [ ) ] [ ] [ ( 1 2 1 2 1 < − Γ ⋅ ⋅ ⋅ + ⋅ ⋅ + Γ ⋅ + Γ ⋅ ⋅ ⋅ + ⋅ ⋅ + Γ ⋅ + − − P E k F D E k F D B A E k F D E k F D B A P T 0 0 ) ( ] [ )) ( ] [ ( 0 2 1 2 1 < Γ ⋅ + ⋅ ⋅ Γ ⋅ + ⋅ ⋅ + Φ ⇒ E E k F D E E k F D T
[
0] [
0]
[ ] 0 0 ] [ 0 2 1 2 1 < Γ ⋅ + + Γ ⋅ + + Φ ⇒ T T T D k F E E E E k F D (3-33) 其中 − Γ ⋅ + Γ ⋅ + − = Φ ( −1 ) P B A B A P T v 根據定理 1,我們將不等式(3-27)的條件改為R=I, 2 1 γ γ = ,我們可以得到不等 式(3-34),[
]
0 I 0 0 I , 0 some for ] [ ] [ where , 0 2 1 2 1 2 1 2 1 2 1 < ⋅ ⋅ ⋅ ⋅ + > ≤ ⋅ < ⋅ ⋅ + ⋅ ⋅ + − − T T T T T T D E D E Y I k F k F D F E E F D Y γ γ γ γ γ c ⇒[
]
0 I 0 0 I , 0 some for ] [ ] [ where , 0 1 2 1 < ⋅ ⋅ + > ≤ ⋅ < ⋅ ⋅ + ⋅ ⋅ + − T T T T T T D E D E Y I k F k F D F E E F D Y γ γ γ c (3-34) 再將不等式(3-33)與不等式(3-34)比較,我們可以得到下列不等式,0 0 0 I 0 0 I 0 0 ) ( 1 2 1 2 1 < + ⋅Γ ⋅ ⋅ + ⋅Γ + Φ − T T D E E D E E γ γ (3-35) 針對不等式(3-35),我們再藉由schur complement的觀念,我們可以得到下列不 等式, 0 I 0 0 0 I 0 0 0 ) ( ) ( 1 2 1 1 2 1 < ⋅ − ⋅ − Γ ⋅ + − Γ ⋅ + Γ ⋅ + Γ ⋅ + − − − γ γ T T T D E E D P B A E E B A P (3-36) 然後取轉換矩陣為diag(P , I , I , I )-1 ,再對不等式(3-36)做全等轉換(congruence transformation),我們可以得到下列不等式, 0 I 0 0 0 I 0 ) ( 0 ) ( 0 ) ( ) ( 1 1 2 1 1 1 2 1 1 1 1 < ⋅ − ⋅ − ⋅ Γ ⋅ + − ⋅ Γ ⋅ + Γ ⋅ + ⋅ Γ ⋅ + ⋅ − − − − − − − − γ γ T T T D P E E D P P B A E E P B A P P (3-37) 接著令Χ P= −1, =Γ⋅ −1 P W ,然後取轉換矩陣為diag( I , I , I ,γ⋅I),再對不等式 (3-37)做全等轉換,最後我們可以得到不等式(3-26),因此(3-24)式提供一穩定的 順滑面之設計如下: s[k]=x2[k]−Γ⋅x1[k] (3-38)
3.3 類滑模控制器設計
類滑模控制器設計
類滑模控制器設計
類滑模控制器設計
針對系統(3-1)我們要如何去設計類滑模控制器呢?對此我們提供了兩種控制法
則,這兩種控制器各別為非線性迫近(nonlinear approach)與修正型非線性迫近
(modified nonlinear approach)兩種。
3.3.1 非線性迫近
非線性迫近
非線性迫近
非線性迫近
從假設3中,我們另外定義了d 以及0 δd,如(3-39)式所示。在這裡, ⋅ 是一個 向量範數(vector norm)。 ) ( 2 1 0 dl du d = + , d = du −dl 2 1 δ (3-39) 首先,我們詳細指明我們所想要的順滑變數軌跡sd[k] ,接著我們要設計一控 制器,去使得整個系統(3-1)的順滑變數s[k] 能去對sd[k] 去做追蹤的動作,在此 我們採用了下列迫近條件[9]: s[k+1]=d[k]−d0 +sd[k+1] (3-40) 在這sd[k] 是一個適當的已知函數,其中sd[k] 的一種標準型式[9]如下所示, if ] [ if ] 0 [ ] [ * * * * k k k k k k k k k d d ≥ = < − = 0 s s s (3-41) 其中 * k 是一個正整數 * k 的選取可以根據設計者的要求,看希望系統軌跡能在第幾步時到達順滑面而 去決定,而且 * k 的選取也取決於系統軌跡上順滑面的收斂速度以及控制器所能 提供的能量大小。當 * k 選取較大時,系統軌跡會較慢上順滑面,並且控制器所消 耗用的能量會較小;反之,當 * k 選取較小時,系統軌跡會較快上順滑面,控制器
所消耗用的能量也會相對較大。對於(3-41)式的形式,sd[k] 的圖形如圖3.1所 示。 圖3.1 根據(3-41)式所描述之sd[k] 的圖形 現在我們要去設計控制器,使得系統軌跡能如同迫進條件(3-40)所描述的ㄧ樣, 所以我們針對系統(3-1)去計算s[ +k 1],接著我們可以得到下式, s[k+1]=f2(x1[k],x2[k])+G(x1[k],x2[k])⋅u[k]+d[k]−φ(f1(x1[k],x2[k])) (3-42) 接著我們將(3-42)式代入(3-40)式,我們可以推得, f2(x1[k],x2[k])+G(x1[k],x2[k])⋅u[k]−φ(f1(x1[k],x2[k])=−d0+sd[k+1] (3-43) 從(3-43)式中,我們可以推得控制器的形式如(3-44)式所示,
[
f x x f x x d s]
x x u[k]=G( 1[k], 2[k])−1⋅ φ( 1( 1[k], 2[k]))− 2( 1[k], 2[k])− 0 + d[k+1] (3-44) 我們將(3-44)式以及(3-1)式代入(3-3)式,我們可以推得下式, s[k +1]−sd[k+1] = d[k]−d0 ≤δd (3-45) 我們可以保證當 * k k ≥ 時,系統狀態必定滿足下列不等式: s[k+1] = d[k]−d0 ≤δd (3-46) 藉由(3-46)式,我們可以得知類滑模帶寬的大小將會小於等於δd,在這另外註明 的是,當d[k]≡0時,系統的漸近穩定特性仍然能被保證。3.3.2 修正型非線性迫近
修正型非線性迫近
修正型非線性迫近
修正型非線性迫近
如果d[k]的變化不激烈,被限制如同(3-47)式, d[k+1]−d[k] ≤∆d (3-47) 其中∆d 是一個已知的常數,並且符合∆d <δd 然後我們可以採用修正型的控制器,去使得類滑模帶寬更進一步的降低,接著我 們採用此修正型迫近條件
∑
= − − + + − = + k i d d k i i k k 0 0 [ 1] ( [ ] []) ] [ ] 1 [ d d s s s s (3-48) 再將(3-42)式代入(3-48)式中,我們可以推得,
∑
= − − + + − = − ⋅ + k i d d k i i k k k k k G k k 0 0 2 1 1 2 1 2 1 2 ]) [ ] [ ( ] 1 [ ])) [ ], [ ( ( ] [ ]) [ ], [ ( ]) [ ], [ ( s s s d x x f u x x x x f φ (3-49) 從(3-49)式中,我們可以推得修正型控制器如下所示,(
)
− − + + − − ⋅ =∑
= − k i d d k i i k k k k k k G k 0 0 2 1 2 2 1 1 1 2 1 ] [ ] [ ] 1 [ ]) [ ], [ ( ])) [ ], [ ( ( ]) [ ], [ ( ] [ s s s d x x f x x f x x u φ (3-50) 接下來我們要去證明,當採用修正型控制器時,系統的類滑模帶寬可以更進一 步的降低。我們將(3-50)式以及(3-1)式代入(3-3)式,再藉由數學歸納法,我們知 道s[1]−sd[1]=d[0]−d0、s[2]−sd[2]=d[1]−d0 −(s[1]−sd[1])=d[1]−d[0]、 ] 1 [ ] 2 [ ]) 2 [ ] 2 [ ( ]) 1 [ ] 1 [ ( ] 2 [ ] 3 [ ] 3 [ s d d0 s s s s d d s − d = − − − d − − d = − 、…,因此我們可 以推得(3-51)式成立, ] 2 [ ] 1 [ ] [ ] [i −sd i =di− −di− s for 2≤i ≤k (3-51) 然後根據修正型迫近條件(3-48)得知,∑
= − − − = + − + k i d d k k i i k 0 0 ( [] [ ]) ] [ ] 1 [ ] 1 [ s d d s s s∑
= − − − − − − − = k i d d d i i k 2 0 ( [0] [0]) ( [1] [1]) ( [] [ ]) ] [ d s s s s s s d (3-52) 然後將(3-51)式代入(3-52)式得到,∑
= − − − − − − − = + − + k i d k k i i k 2 0 0 ( [0] ) ( [ 1] [ 2]) ] [ ] 1 [ ] 1 [ s d d d d d d s (3-53) 從(3-53)式中,我們可以推得下式, s[k+1]−sd[k+1]=d[k]−d[k−1] (3-54) 因此,我們可以保證當k ≥max(k*;2)時,系統狀態必定滿足下列不等式: s[k+1] = d[k]−d[k−1] ≤∆d (3-55) 我們將(3-46)式與(3-55)式相比,因為∆d <δd,所以這也意謂著,採用修正型 非線性迫近控制器的類滑模帶寬比採用非線性迫近控制器的類滑模帶寬更 小,所以這也證明了修正型非線性迫近控制器具備了更好的穩健性。CHAPTER 4
應用範例模擬之比較與分析
應用範例模擬之比較與分析
應用範例模擬之比較與分析
應用範例模擬之比較與分析
4.1 拖車系統
拖車系統
拖車系統
拖車系統(trailer-truck model)
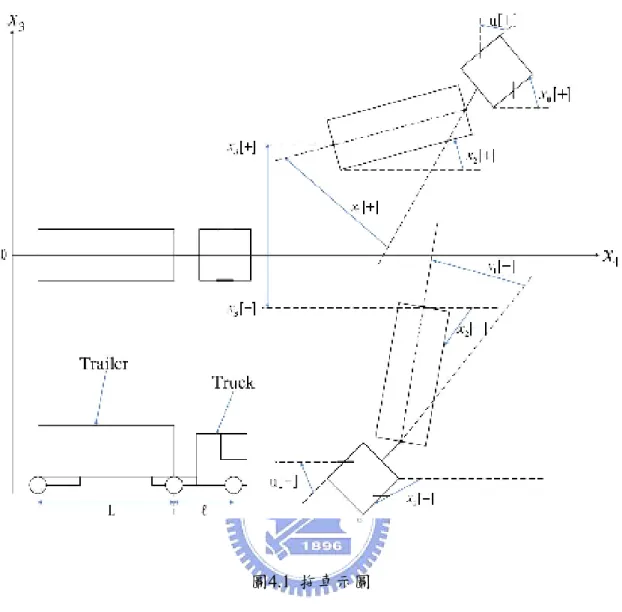
圖4.1呈現出整個拖車系統的架構,我們可以推得拖車連續的動態如下所示: )) ( cos( )) ( cos( ) ( )) ( sin( )) ( cos( ) ( )) ( sin( ) ( ) ( ) ( ) ( )) ( tan( ) ( 2 1 4 2 1 3 1 2 2 0 1 0 t x t x t x t x t x t x t x L t x t x t x t x t u t x ⋅ ⋅ = ⋅ ⋅ = ⋅ = − = ⋅ = η η η η & & & l & (4-1)
圖4.1 拖車示圖 在拖車系統(4-1)中,參數之意義如下: l:卡車(truck)的長度 L:掛車(trailer)的長度 η:倒車移動的速度 各狀態之意義如下: x0(t):卡車的角度 x1(t):卡車和掛車的角度差 x2(t):掛車的角度 x3(t):掛車後端的垂直位置
x4(t):掛車後端的水平位置 u(t):前輪操縱角度 我們可以更進一步的將系統(4-1)整理成如下的動態方程式: )) ( cos( )) ( cos( ) ( )) ( sin( )) ( cos( ) ( )) ( sin( ) ( )) ( tan( )) ( sin( ) ( 2 1 4 2 1 3 1 2 1 1 t x t x t x t x t x t x t x L t x t u t x L t x ⋅ ⋅ = ⋅ ⋅ = ⋅ = ⋅ + ⋅ − = η η η η η & & & l & (4-2) 接著我們對拖車系統(4-2)離散化,在這裡針對拖車系統離散化之後的動態,已經 在文獻[22]中有所提出,如(4-3)式所示,其中 Τ 為取樣時間。
(
)
(
)
(
)
+ + ⋅ ⋅ ⋅ + = + + + ⋅ ⋅ ⋅ + = + ⋅ ⋅ + = + ⋅ ⋅ + ⋅ ⋅ − = + 2 ] 1 [ ] [ cos ]) [ cos( ] [ ] 1 [ 2 ] 1 [ ] [ sin ]) [ cos( ] [ ] 1 [ ] [ sin ] [ ] 1 [ ] [ tan ] [ sin ] [ ] 1 [ 2 2 1 4 4 2 2 1 3 3 1 2 2 1 1 1 k x k x k x T k x k x k x k x k x T k x k x k x L T k x k x k u l T k x L T k x k x η η η η η (4-3)對於拖車系統
,
我們最主要的控制目的是在拖車做後退移動的時候,藉由控 制著前輪旋轉的角度,使得整個拖車最終能夠位於水平線(x3 =0)上。換句話說, 也就是去控制拖車,使得x1→0、 x2→0 和 x3→0。就控制目的而言,所以在這 我們只要探討系統(4-3)的三個方程式即可,因此我們將要分析的系統動態如下所 示:
(
)
(
)
(
)
⋅ ⋅ + ⋅ ⋅ ⋅ + = + ⋅ ⋅ + = + ⋅ ⋅ + ⋅ ⋅ − = + ]) [ sin( 2 ] [ sin ]) [ cos( ] [ ] 1 [ ] [ sin ] [ ] 1 [ ] [ tan ] [ sin ] [ ] 1 [ 1 2 1 3 3 1 2 2 1 1 1 k x L T k x k x T k x k x k x L T k x k x k u T k x L T k x k x η η η η η l (4-4) 對於離散化之後的拖車系統(4-4) ,我們將參數設定如表4.1。 表4.1 拖車參數設定 l 卡車的長度 0.087[m] L 掛車的長度 0.13[m] η 倒車移動的速度 -0.1[ sec m ] T 取樣時間 0.5[sec] 針對系統(4-4)的控制器設計,我們假設拖車的前輪所能旋轉的角度介於 4 π − 到 4 π 之間(i.e., 4 ] [ 4 π π ≤ ≤ − u k ),並且在每個取樣時間點u[k]為常數。當系統(4-4) 在k =0時,我們可以得到下列動態,(
)
(
)
(
)
+ ⋅ ⋅ ⋅ ⋅ ⋅ + = ⋅ ⋅ + = ⋅ ⋅ + ⋅ ⋅ − = ]) 0 [ sin( 2 ] 0 [ sin ]) 0 [ cos( ] 0 [ ] 1 [ ] 0 [ sin ] 0 [ ] 1 [ ] 0 [ tan ] 0 [ sin ] 0 [ ] 1 [ 1 2 1 3 3 1 2 2 1 1 1 x L T x x T x x x L T x x u T x L T x x η η η η η l (4-5) 就直觀上來看,我們取控制器u[0]所能旋轉的角度介於 4 π − 到 4 π 之間,如圖4.2所示。並且令x1[1]=x2[1]=x3[1]=0,因此我們可以得到系統狀態一步就到達原 點的軌跡,如圖4.3所示。 圖4.2 控制器u[0]所能旋轉的角度 -0.5 0 0.5 -0.2 -0.1 0 0.1 0.2 -4 -2 0 2 4 x 10-3 x1[k](rad) x2[k](rad) x 3 [k ]( m ) 圖4.3 拖車系統的狀態只要一步就到原點的軌跡 當系統(4-4)在k=1時,我們可以得到下列動態,
![圖 2.3 連續順滑模態控制之系統軌跡 接下來我們考慮單輸入的離散系統, x [ k + 1 ] = A ⋅ x [ k ] + b ⋅ u [ k ] (2-13) 在這裡, x [ k ] ∈ ℜ n 是系統狀態向量, u [ k ] ∈ ℜ 1 是控制輸入, A 以及 b 都是有著 適當維度的矩陣。當一離散滑模控制應用在系](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752238.206161/21.892.137.756.106.748/接下來在這裡∈ℜn是系統狀態向ℜ是控制輸以及當一離散滑.webp)
FuzzyQSMC1 QSMC2 圖 4.31 當考慮雜訊時,拖車系統狀態 x 1 [ k ] 之軌跡圖](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752238.206161/78.892.156.709.366.810/系統之非線性迫近控制器修正型非線性迫近控制QSMC當考訊時系統跡圖.webp)
