行政院國家科學委員會專題研究計畫 成果報告
風力發電系統強健控制與性能監測技術研究
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 100-2221-E-009-134- 執 行 期 間 : 100 年 08 月 01 日至 101 年 07 月 31 日 執 行 單 位 : 國立交通大學機械工程學系(所) 計 畫 主 持 人 : 鄭泗東 計畫參與人員: 碩士班研究生-兼任助理人員:江國維 碩士班研究生-兼任助理人員:曾炫錡 碩士班研究生-兼任助理人員:歐咨宏 碩士班研究生-兼任助理人員:黃靖哲 報 告 附 件 : 出席國際會議研究心得報告及發表論文 公 開 資 訊 : 本計畫可公開查詢中 華 民 國 101 年 11 月 01 日
中 文 摘 要 : 本研究計畫之核心研究內容為全橋半控型整流器及阻抗源變 流器整合之風力發電電力轉換系統,並進行基於倒階控制法 則之積分型順滑模態控制應用於可變速風力發電機。研究載 具為 5KW 永磁同步發電機,使用 32 位元數位控制板實現可變 結構型的積分型順滑動控制,以驗證控制法則之性能,改善 風能的瞬時變化性對輸出功率的影響,並追蹤風力機運轉 點,使其保持在最大功率點運轉,提高發電效率以及實用 性,開發高效率的小型風力發電系統。同時進行建立葉片應 力應變之無線感測平台監測及控制技術,結合風場監測平 台、結構負載感測、網路伺服器、資料庫,建立一套小型風 力發電系統即時監測安全防護系統架構。並由長期監控的風 力發電系統資料庫,以類神經網路(ANN)及馬爾科夫轉移矩陣 法(Markov Models)進行短期風速與風向預測系統。 中文關鍵詞: 風力發電機、遠端監控、阻抗源變流器、順滑動控制、倒階 控制、風速預測
英 文 摘 要 : This project carries on the research and conduct a half-controlled converter and Z-source inverter based wind energy transformation system. The control of variable-speed permanent-magnet synchronous wind turbine generator is based on integral-type sliding mode control via backstepping approach which is
performed by a 32-bit digital signal controller. This control strategy presents attractive features such as robustness to parametric uncertainties of the turbine for ensuring stability in operation regions. The wind turbine is instrumented with sensors for recording turbine operational parameters, meteorological conditions, electrical quantities and mechanical loads in terms of strain gauge signals. The wireless data acquisition system will be designed and
implemented to track the blade deformation during operation. This project also proposes Artificial Neural Network model and Markov Models for local area short term wind speed prediction.
英文關鍵詞: wind turbine, remote sensing, Z-source inverter, sliding mode control, backstepping control, wind speed prediction.
1
J期中進度報告
行政院國家科學委員會補助專題研究計畫
J期末報告
風力發電系統強健控制與性能監測技術研究 (1/3)
計畫類別:J個別型計畫 □整合型計畫
計畫編號:NSC 100-2221-E-009 -134 -
執行期間: 100 年 08 月 01 日至 101 年 07 月 31 日
執行機構及系所:國立交通大學 機械工程學系(所)
計畫主持人:鄭泗東 副教授
共同主持人:
計畫參與人員:江國維,曾炫錡,歐咨宏,黃靖哲,蔡珺竹
本計畫除繳交成果報告外,另須繳交以下
出國
報告:
□赴國外移地研究心得報告
□赴大陸地區移地研究心得報告
J出席國際學術會議心得報告及發表之論文
□國際合作研究計畫國外研究報告
處理方式:
除列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,J一年□二年後可公開查詢
中 華 民 國 101 年 10 月 30 日
2
目錄
中英文摘要及關鍵詞... 4 一、前言... 5 二、研究目的... 5 三、文獻探討... 6 3.1 研究一文獻探討... 6 3.2 研究二文獻探討... 6 3.3 研究三文獻探討... 7 3.4 研究四文獻探討... 7 四、研究方法... 8 4.1 四項研究架構之基礎:永磁同步發電機模型... 8 4.2 研究一之理論架構... 8 4.2.1 順滑模態控制理論 ... 9 4.2.2 倒階(Backstepping)控制器設計... 12 4.2.3 積分型順滑模態控制器設計 ... 13 4.3 研究二之理論架構... 15 4.3.1 順滑模態觀測器 ... 15 4.3.2 永磁同步發電機向量控制理論 ... 18 4.4 研究三之理論架構... 19 4.4.1 阻抗源變流器建模 ... 19 4-4-2 阻抗源變流器短路區間產生方法... 20 4-5 研究四之理論架構 ... 21 4-5-1 系統架構... 21 4-5-2 無線感測系統... 21 4-5-3 能量採集設計... 22 五、結果與討論(含結論與建議)... 23 5.1 研究一之結果與討論... 23 5.1.1 實驗架設平台 ... 23 5.1.2 實驗及模擬結果 ... 23 5.1.3 討論 ... 24 5.2 研究二之結果與討論... 25 5.2.1 實驗架設平台... 25 5-2-2 實驗與模擬結果... 25 5.2.3 討論... 27 5.3 研究三之結果與討論... 27 5.3.1 實驗架構 ... 27 5.3.2 實驗結果 ... 283 5.3.4 討論 ... 29 5.4 研究四之結果與討論... 30 5.4.1 實驗架構 ... 30 5.4.2 實驗結果 ... 31 5-4-3 討論... 33 參考文獻... 34 國科會補助專題研究計畫成果報告自評表... 37 國科會補助計畫衍生研發成果推廣資料表... 39 國科會補助專題研究計畫項下出席國際學術會議心得報告... 41
4
中英文摘要及關鍵詞
本研究計畫之核心研究內容為全橋半控型整流器及阻抗源變流器整合之風力發電電力轉換系 統,並進行基於倒階控制法則之積分型順滑模態控制應用於可變速風力發電機。研究載具為 5KW 永磁同步發電機,使用 32 位元數位控制板實現可變結構型的積分型順滑動控制,以驗 證控制法則之性能,改善風能的瞬時變化性對輸出功率的影響,並追蹤風力機運轉點,使其 保持在最大功率點運轉,提高發電效率以及實用性,開發高效率的小型風力發電系統。同時 進行建立葉片應力應變之無線感測平台監測及控制技術,結合風場監測平台、結構負載感測、 網路伺服器、資料庫,建立一套小型風力發電系統即時監測安全防護系統架構。並由長期監 控的風力發電系統資料庫,以類神經網路(ANN)及馬爾科夫轉移矩陣法(Markov Models)進行 短期風速與風向預測系統。 關鍵詞:風力發電機、遠端監控、阻抗源變流器、順滑動控制、倒階控制、風速預測。This project carries on the research and conduct a half-controlled converter and Z-source inverter based wind energy transformation system. The control of variable-speed permanent-magnet
synchronous wind turbine generator is based on integral-type sliding mode control via backstepping approach which is performed by a 32-bit digital signal controller. This control strategy presents attractive features such as robustness to parametric uncertainties of the turbine for ensuring stability in operation regions. The wind turbine is instrumented with sensors for recording turbine
operational parameters, meteorological conditions, electrical quantities and mechanical loads in terms of strain gauge signals. The wireless data acquisition system will be designed and
implemented to track the blade deformation during operation. This project also proposes Artificial Neural Network model and Markov Models for local area short term wind speed prediction.
Keywords: wind turbine, remote sensing, Z-source inverter, sliding mode control, backstepping control, wind speed prediction.
5
一、前言
風力發電領域囊括了電機機械、電力電子、控制系統、機械工程等相關知識,為一個 整合性高的產業,一般風力發電機採用感應發電機,經交直流電力轉換並聯於商用輸配電系 統,但由於感應發電機啟動電流大,需要軟性啟動裝置且效率低,故經濟效益較不佳。目前 中小型風力發電系統常採用永磁同步式發電機,增加發電機運作效率,且永磁同步發電機可 用於直驅式風力發電系統,省略齒輪傳動系統,建置及維護成本較低,為目前風機系統發展 中的重要議題。 為求在風力發電系統能有全面性的探討,故在計畫期間共執行四項研究: (1)基於倒階控制法則之積分型順滑模態控制應用於可變速風力發電機(2)順滑模態觀測速度控制應用 於無轉速感測之直驅式可變速風力發電機(3)阻抗源變流器之電力轉換研究(4)風力機葉片應變之遠端 監控系統結合自充式電源採集技術研究。 利用順滑模態之概念控制發電機轉速以獲取最高發電功率是研究一及研究二主要重 點,研究一主旨在設計穩定且有強健性的控制器,研究二則深入研究無轉速感測轉速控制。 研究三以電力電子技術為主應用新型電力轉換之電路拓樸結構來突破以往電壓源變流器(VSI) 的一些限制,研究四則以風機葉片之監控、偵測、破損分析為目的,建構應變無線感測系統 以及電腦即時監控界面。二、研究目的
z 風力發電系統如何有效的擷取風能及以高轉換效率產生電力,主要關鍵在於葉片的設計與使發電機 在風速變動下運轉於最佳轉換效率速度。研究一目的在風速變動不穩定的環境中,發展有效控制風 力發電機運轉速度的控制器,對於外界的干擾和系統參數不確定性加強系統的強健性,使系統能快 速的隨著風速改變轉速,並且有效的抑制外界的干擾,使發電機輸出功率更加穩定確保發電品質。 z 小型風力發電機常採用無轉速感測轉速控制策略取代安裝轉速感測器所帶來的成本與可 靠度問題。以發展無轉速感測之直驅式可變速風力發電機為動機,研究二使用永磁同步發 電機搭配實作的周邊迴授電路、驅動電路與控制器軟硬體實現順滑模態觀測器於永磁同步 發電機的轉速估測與控制。 z 風力發電之電力轉換系統大多為交流-直流-交流併網系統,系統中產生的直流電源經常為 不穩定狀態,需要在直流-交流轉換器前級加入直流-直流轉換器,以提昇直流鏈電壓。阻 抗源變流器以其獨特的阻抗電路,可避免使用直流-直流轉換器,減少驅動電路的成本與系 統的複雜性。在此風力發電轉換器與阻抗源變流器之驅動電路實作及模擬即為研究三之重 點。 z 研究四以小型風力發電機為研究載具,設計葉片應變感測及訊號處理系統,藉由搭載 ZigBee 協定之參考節點(Reference node)以無線傳輸的方式,訊號傳輸給網路協調器(Coordinator),協調器接收訊號後經由 USB 傳送資料至電腦,以實現葉片應變遠端監控系 統。
6
三、文獻探討
3.1 研究一文獻探討
1. 2004年K.B. Goh等人提出使用super-twistingz方式的順滑模態控制用於感應電動機上,用來減緩外
界負載所造成順滑模態的跳切(chattering)現象[1]。2009年Brice Beltran 等人所提出相關的研究使 用高階順滑模態控制器(High-order Sliding Mode Control)配合順滑模態的觀察器,用來改善發電 機扭矩所產生的切跳現象[2]。2008年F. Valenciaga and P. F. Puleston提出使用二階順滑模態控制 器(Second-order Sliding Mode Control),將系統依據發電機安全轉速分成兩個操作區,用來保護發 電機並快速追蹤風速達到提高發電效率[3] 2. 有研究顯示順滑模態控制中的到達模態,在一些特別系統中,有可能因為一些不確定性的不穩定 而導致系統發散[4],因此本研究為了避免不確定因素的影響導致發散,使用積分型順滑模態控 制,因為積分型順滑模態控制設計過程中系統初始即在順滑面上,不需要到達模態[5]。 3. 倒階控制是一個常用於非線性系統的控制方式[6][7],設計方式有邏輯性且容易理解,即使風的 變動性相當不穩定,基於倒階控制設計原理的系統特性,可以使系統擁有快速的追蹤特性並確保 其穩定性,並且對於系統參數的不確定性也能達到控制效果[8]。2010年A.L. Nemmour等人提出 使用倒階控制用於感應風力發電機上,可以在直流電壓端擁有相當好的追蹤效果[9]。2005年 Shun-Sheng Ke提出使用無感測器的倒階控制用於永磁同步馬達的轉速追蹤,使用倒階控制於觀 察器及控制器上不僅能使系統漸近穩定,還能將追蹤誤差收斂於零[10]。 3.2 研究二文獻探討
1. Junqi Wang 等人“Modeling and Real-Time Simulation of Non-Grid-Connected Wind Energy Conversion System”[11],此篇論文以永磁同步發電機為架構建立直驅式變頻恒速風力發電 系統並以 DSP 數位訊號處理器實現風力發電機的轉速控制策略,控制策略採用傳統比例 積分控制器,從模擬與實驗結果證明風速變化時發電機轉速能夠變化到最佳值,然而此篇 文獻中直驅式變頻恒速風力發電系統本身並非為硬體,而是建模在RT-LAB 此套模擬軟體 中,因此其實驗環境較實際上來的理想。
2. Jemaa Brahmi 等人“A Comparative Study Between Three Sensorless Control Strategies for
PMSG in Wind Energy Conversion System”[12],此篇文獻以模擬的方式探討了適應性參考 模型系統、類神經網路與順滑模態觀測器三種應用在風力發電系統中永磁同步發電機的轉 速與轉子位置估測方法,模擬結果顯示出在變動風場下,發電機定子電阻值未變化下這三 者皆能有效的估測到轉速與轉子位置且順滑模態觀測器估測結果具有切跳現象,然而當發 電機定子電阻產生變化時只有類神經網路與順滑模態觀測器仍然具有估測能力。
3. Shengwen Fan 等人“High Performance Sensorless Control of PMSM Based on Sliding Mode Current Observer”[13],此篇文獻利用典型的永磁同步馬達轉速控制架構搭配順滑模態觀測 器從模擬與實驗上驗證了順滑模態觀測器應用在永磁同步馬達無轉速感測轉速控制的可 行性並且將順滑模態觀測器中符號函數以飽和函數取代以減緩其切跳現象。
4. L.G. González 等人“Synchronization Techniques Comparison for Sensorless Control applied to Wind Energy Conversion Systems”[14],此篇在前言中提到在中小型風力發電機中常使用轉
7 速估測法取代安裝轉速感測器以減少成本。
3.3 研究三文獻探討
1. Fang Zheng Peng,“Z-source inverter”[15],此篇文獻介紹了阻抗源變流器應用於燃料電池之 運作原理,且針對阻抗源變流器做模擬與電路實作,Z-source inverter 有兩種運作模式, 其中之一為一般變流器運作模式,另一個運作模式是使上下臂短路,對特殊的電感-電容 網路作儲能的行為。當燃料電池電壓低時,以包含短路狀態的控制方式,維持輸出交流電 壓。當燃料電池電壓足夠時,以驅動傳統變流器之方式即可,不需加入短路狀態。驗證了 即使直流鏈電壓稍低,調整短路狀態之責任周期,可使變流器輸出之電壓昇壓。
2. Dehghan, S.M. 等 人 “A New Variable-Speed Wind Energy Conversion System Using Permanent-Magnet Synchronous Generator and Z-Source Inverter”[16],此篇結合二極體全橋 整流器與阻抗源變流器,而且與二極體全橋DC-DC 單開關昇壓型風力發電系統比較,結 果為:具有阻抗源變流器之風力發電系統傳送實功率至電網之效率較高。傳統變流器沒有 加入盲時所獲得之電流THD 為 3.1%,與阻抗源變流器產生之電流 THD 相近,但傳統變 流器需加入盲時至切換開關週期內,避免造成短路,加入此項限制後,傳統變流器電流 THD 升高至 4.96%。由文獻回顧 15~16,觀察出阻抗源變流器昇壓的特性可做為最大功率 追蹤用途,擁有傳統電壓源變流器所沒有的特性,且效率比傳統電壓源變流器高。 3.4 研究四文獻探討 1. 徐椿樑等人(2009)“小型風力發電系統之遠端監控傳輸系統介面設計與研製”[17],此篇提 出以藍芽技術為傳輸方式製作風力發電機之發電電壓、電流、轉子轉速及功率監控系統, 無線傳輸系統電源供應採用風力發電機產生的電力以及太陽能板供給。 2. 傅鶴齡等人(2010)“風力發電機遠端監控及資料擷取系統”[18],此論文監控風力發電機風 速、電壓、電流、功率、蓄電池電壓及風機發電量,以有線方式傳輸至電腦並以LabView 軟體圖像化顯示即時數據。
3. Chia Chen Ciang et al (2008)“Structural health monitoring for a wind turbine system: a review of damage detection methods”[19],此篇針對大型風力發電機偵測葉片的方法,如:音射 (Acoustic emission)、熱影像(Thermal imaging method)、超生波( Ultrasonic methods)、光纖 傳感(Fibre optics method)、基於模態(Modal-based approaches)、雷射都普勒測震儀(Laser Doppler vibrometer method)等各種感測大型風機葉片技術介紹。
4. P. Kulha et al (2011)“Piezoresistive Sensor for Strain Measurement on Turbine Blade with Wireless Telemetry Data Acquisition”[20],此篇介紹製作壓阻式應變感測器製成結合 RF 無 線技術達成風力發電機葉片應變感測系統,其系統電源供給由電池提供。
5. R. Andrew Swartz1 et al (2010)“Structural Monitoring of Wind Turbines using Wireless Sensor Networks”[21],此篇介紹無線感測系統監控風力發電機的結構,在葉片、塔架設置多點無 線感測節點,使用應變規及加速規偵測風機葉片及塔柱結構,感測節點採用電池獨立供電。 6. Yen Kheng Tan (2011)“Self-Autonomous Wireless Sensor Nodes With Wind Energy
Harvesting for Remote Sensing of Wind-Driven Wildfire Spread”[22]此論文設計一套獨立移 動式無線感測系統搭載微型風力發電機,針對微型發電機電源管理控制設計。
7. Emilio Sardini (2011)“Self-Powered Wireless Sensor for Air Temperature and Velocity
Measurements With Energy Harvesting Capability”[23]本篇設計風速及溫度無線感測器,電 源以微型風力發電機產生。
8
四、研究方法
4.1 四項研究架構之基礎:永磁同步發電機模型 此四項研究皆以永磁同步發電機模型為基礎,並使用固定角度的扇葉,根據空氣動力學, 風力發電機從風能中所捕獲的功率(Pa)和扭矩(Tq) 2 ) ( 2 1 Av C Pa = ρ p λ (1) 3 ) ( 2 1 Av C Tq= ρ q λ (2) λ λ λ) ( ) ( p q C C = (3)發電功率因數Cp是由扇葉角度β(pitch angle) 和風扇尖速比λ(tip speed ratio)所決定,Cp並非定
值,理論上C p的最大值為59%,此即為貝茲極限(Betz limit)[11],但在實際狀況中受到外界因 素影響,實際的輸出係數約在20%~40%,Cq為發電機扭矩系數,ρ為空氣密度,A為風扇轉動 所涵蓋的圓面積(πR2),R為風扇半徑,v為風速。 v Rωm λ = (4) 發電機機械動態方程式如下[12]: m m m L e T J B T − = ω& + ω (5) q f P e i N T λ 2 2 3 = (6) Te為發電機磁轉矩,TL為負載轉矩,J為發電機轉動慣量,Bm為黏滯摩擦係數,ωm為轉子機械 角速度,NP為發電機級數,λf為轉子磁通鏈。 利用座標轉換的方法,將發電機動態方程式轉換至與轉子同步的座標系統(d-q軸座標), 得到發電機的數學模型 75 . 0 0 2 0 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ J T L vL v i i B J N L N L R N N L R i i L q d m q d m f p f p m p m p m q d ω λ λ ω ω ω& & & (7) L為dq軸之定子電感,R為線圈繞組之等效電阻,id、iq為dq軸之定子電流,vd、vq為dq軸之定 子電流。 為了得到解耦的發電機狀態方程式,通常使用將id設為0的向量控制方式,因此將(7)式改寫成 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ J T L v i B J N L N L R i L q m q m f p f p m q ω λ λ ω& 0.75 2 & (8) (8)式為將id設為0時,發電機之數學模型。 4.2 研究一之理論架構 在研究一中主要理論分積分型順滑模態控制及倒階控制,其系統結構如圖(一)所示。使 用積分型順滑模態控制配合倒階控制,由於永磁同步風力發電機輸入的風能的不穩定性與外 界干擾,為了捕獲最大發電量,發電機轉速不斷的改變,也因為風的變動範圍很大,因此控 制器必須具備快速的響應速度,且對系統的擾動必須有很好的強健性,順滑模態控制相當適
9 合風力發電系統使用。 圖4-2-1.風力發電機系統架構 4.2.1 順滑模態控制理論 順滑模態控制理論的定義為先使受控系統產生兩個以上的子結構後再利用刻意加入的切 換條件產生順滑模態以達到控制目的且不連續的切換條件經由等效控制[24]證明可以產生連 續的順滑模態,並且有極高的強健性,亦即對於外界雜訊與參數變化較不敏感。此定義更進 一步的說明如下,假設有一系統可以表示成
( , ( ))
x
&
=
f x u x
(9) 其中x 為系統狀態,u(x)為控制輸入可以表示成下列的切換條件( )
( ) 0
( )
( )
( ) 0
u x
S x
u x
u x
S x
+ −⎧
>
= ⎨
<
⎩
(10) 其中S(x)為順滑函數,(9)的切換條件可如圖二的符號函數(Sign Function)所示 圖4-2-2 符號函數 在圖二中 S(x)分成大於零、等於零與小於零三個子空間,S(x)=0 時必須是連續的且包含 系統狀態的平衡點x=0,而順滑模態控制的目的便是使 S(x)=0 時產生順滑模態,此時的 S(x) 又稱之為順滑平面,當系統初始狀態 x(0)位於順滑平面之外時,在切換條件控制輸入作用下 必需確保狀態軌跡在有限的時間 th 之內接觸到順滑平面,這段過程叫做迫近模態(Reaching Mode),當狀態軌跡進入順滑平面後產生順滑模態(Sliding Mode),此時狀態軌跡便會朝著系 統的平衡點逼近並且不再離開順滑平面,上述的過程如圖三所示。10 圖4-2-3 迫近模態與順滑模態 在理論上若是切換條件的控制輸入擁有無限大的頻率,可以想像的是在圖二中若是u+(x) 與u-(x)同時存在則順滑模態將永遠存在,然而在實際物理系統上皆有其有限的切換頻率或是 必定存在的時間延遲故理想上的順滑模態不可能存在,因此實際上系統狀態在順滑模態附近 的行為常以圖四所示。 x(0) x(th) S(x)=0 S(x)=ε→0 S(x)=-ε→0 平衡點 圖4-2-4 實際上的順滑模態產生 在圖四中順滑平面被夾在兩個一正一負的順滑函數中,它們的大小 ε 趨近於零,當系統 狀態軌跡進入此夾層時因為有限大的切換頻率因此無法固定的沿著順滑平面趨近平衡點,而 是在上下兩個夾層中來回跳動而造成所謂的切跳(Chattering)現象,這種現象在高頻時往往會 造成受控系統中未建模的高頻成分而使系統不穩定,為了減緩這種現象需要用到順滑層[25] 的概念,也就是將圖二中的符號函數以圖五所示的飽和函數取代。 圖4-2-5 飽和函數 將S(x)簡寫成 S 後圖五所示的飽和函數 Sat(S)可以由下式表示之 1 ( ) 1 S e S Sat S e S e e S e ≥ ⎧ ⎪⎪ =⎨ − ≤ ≤ ⎪ − ≤ − ⎪⎩ (11)
11 在圖4-4 中S ≤ 這段範圍為邊界層的厚度,當順滑函數進入邊界層時其控制輸入值縮小為e e S 因而減緩了切跳現象故邊界層厚度愈厚時切跳現象將愈不明顯,然而同時卻必須付出較低的 控制精度的代價,其原因是較小的控制輸入使得系統狀態不易逼近於平衡點。 使受控系統在順滑平面附近時產生順滑模態行為的條件稱為順滑條件,順滑條件可由圖 六來說明,當系統狀態位於順滑平面附近時若是 S 大於零則其值須隨時間遞減,也就是其對 時間微分必須小於零才能迫使系統狀態朝順滑平面移動,相反的,當 S 小於零則其對時間微 分必須大於零。 圖4-2-6 順滑條件 上述說明可由下式表示之 0
lim
0
s→SS
&
<
(12) 要使受控系統產生順滑模態的先決條件便是要使系統狀態在順滑平面外時產生迫近模 態,而使得系統狀態產生迫近模態的條件稱為迫近條件,其定義為使系統狀態在有限時間內 接觸到順滑平面,而最常用的迫近條件為0
SS
&
< −
σ
S
S
≠
(13) 其中 σ 為一大於零的實數,為了證明上述條件能夠在有限時間內使得系統狀態進入順滑平 面,因此選定以下的Lyapunov 函數 V 20
V
=
S
>
(14) 對(14)微分得2
V
&
=
SS
&
(15) 當(13)成立時可推得2
2
0
dV
V
S
V
dt
σ
σ
=
< −
< −
<
&
(16) 由(16)知 V 的一次微分小於零滿足 Lyapunov 函數的定義,將(3-8)移項整理後得2
dV
dt
V
< −
σ
(17) 對(17)於時間 0 到 t 時積分得12
(
)
( ) ( ) (0) (0)2
|
2
( )
(0
2
V t V t V VdV
V
V t
V
dt
V
=
=
−
< −
σ
∫
(18) 由(18)可以得知下式成立0
≤
V t
( )
<
V
(0)
−
σ
t
(19) 由(19)可以求得 t 必須滿足(0)
V
t
σ
<
(20) (20)中的 t 為一有限值因此證明 V 能夠在有限時間內趨近於零,也證明了(13)能夠滿足達到迫 近模態的需求,當σ 趨近於零時(13)與(12)是相同的所以(12)又稱為迫近順滑條件,同時 V 也 滿足了Lyapunov 穩定性理論[26]中的漸進穩定。 4.2.2 倒階(Backstepping)控制器設計 倒階控制是一個利用遞迴(recursive)程序,有系統的非線性控制器設計方式,藉由選取適 當的遞迴方程式當作子系統的虛擬輸入,並依據Lyapunov穩定性理論,對整個系統達到類似 降階的功能,進而得到所需的控制,由於該控制器設計方式基於Lyapunov穩定性理論,因此 得到之控制器必能保證使系統穩定。 因為系統簡化成2階,因此將推導分成兩個步驟,其推導如下: -Step1 首先定義誤差變數e1,e1為真實轉速ωm與參考轉速ωmref的誤差值 m ref m e1 = ω −ω (21) 對(21)式微分並將(8)式代入可得 J T B i J N e L m m q f p mref m mref + + − = − = ω λ ω ω ω 75 . 0 1 & & & & (22) 接著選取第一個Lyapunov方程式V1 0 2 1 2 1 1= e > V (23) 對其微分並將(24)式代入得到 ) 75 . 0 ( 1 1 1 1 J T B i J N e e e V L m m q f p mref − + + = = ω λ ω& & & (25) 因為要符合Lyapunov穩定性理論(V&1 < 0),因此選取 ) ( 3 4 1 1 J T B e c N J i L m m mref f p qref = ϕ +ω& + ω + (26) c1為一正值,因此Lyapunov穩定性理論(V&1 < 0)成立如下 0 2 1 1 1 = −c e < V& (27) -Step2 定義第二個誤差變數e2,e2為參考電流與真實電流的誤差值 q ref q i i e2 = − (28)13 對其微分並代入(8)式得到 L v L N i L R i i i e q m f p q ref q q ref q − + + = − = ω λ 2 2 & & & & (29) 選取第二個Lyapunov方程式V2 0 2 1 2 2 1 2 =V + e > V (30) 對其微分並將(14)、(16)式代入得到 ) 2 ( 2 2 1 1 2 2 1 2 L v L N i L R i e e c e e V V q m f p q ref q + + − + − = + = ω λ & & & & (31) 因為要符合Lyapunov穩定性理論(V&2 <0),因此選取q軸控制電壓為 ) 2 ( 2 2 m f p q ref q q L N i L R i e c L v = +& + + λ ω (32) c2為另一正值,使得Lyapunov穩定性理論(V&2 <0)成立如下 0 2 2 2 2 1 1 2 = −c e − c e < V& (33) 由於設計過程基於Lyapunov穩定性理論,得到控制器ub使此系統為漸近穩定(Asymptotically stable)。 q b v u = 圖4-2-7 倒階控制器方塊圖 4.2.3 積分型順滑模態控制器設計 積分型順滑控制器的設計流程是先將系統的外部干擾先忽略,設計出所要需求的控制器 之後,再加上系統的外界干擾,利用設計出之控制器配合積分型順滑控制器的設計方式,即 可設計出所需之控制器,此控制器優點在於可達到和無外界干擾一樣的效能,具有很好的強 健性,且和一般的順滑模態控制器相比不需要到達模態(reaching mode),因為設計方法讓 系統一開始就在順滑面(sliding surface)上,可避免不必要的錯誤產生,因為有文獻提出系統在 到達模態過程中,可能會發散[4]。 首先將系統假設如下:
[
( )]
) ( ) ( ) ( ) ( ) ( x f u x B x f x f u x B x f x m ∆ + + = ∆ + + = & (34) 其中∆f( x)為外界干擾為匹配式雜訊(matched noise),即∆f(x)=B∆fm(x)且∆fm(x)已知範圍 ) ( ) (x x fm ≤ρ ∆ 。14 ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎨ ⎧ = = − − = = q m f p q q v u L x B L N i L R x f i x 1 ) ( 2 ) ( λ ω & & (35) 先對沒有干擾的系統做倒階控制,設計控制器ub b u x B x f x& = ( )+ ( ) (36) 接著對有外部干擾對的系統做積分型順滑控制器(ISMC)控制,設計控制器u,取順滑面(sliding surface)為 τ τ σ x t x t t f x Bu d t b
∫
+ − − = 0 ] ) , ( [ ) ( ) ( 0 (37) 在初始時間t=t0時代入s,此時s=0即系統一開始就在順滑平面上,則不需要到達模態(reaching mode),可避免不必要的錯誤產生。接著對順滑面s微分再將(34)式代入得[
m]
b b Bu x f u x B Bu x f t x − ∆ + = − − = ) ( ) ( ) ( ) ( & & σ (38) 即可推導出控制器u ⎩ ⎨ ⎧ = ≠ − = 0 , 0 , σ σ if u if u u u b h b (39) σ σ ρ( x) uh = (40) uh為為順滑模態下用來抑制雜訊。 利用Lyapunov穩定性理論討論控制器對系統的穩定性,取Lyapunov方程式為 0 2 1 2> = σ s V (41) 討論σ不等於0時,對Vs微分並將(39)、(40)式代入得到 0 ) ( ) ( ) ( ) ) ( ( 2 < ∆ + − = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∆ + − = = σ σ σ ρ σ σ ρ σ σ σ x f B B x Bu x f x u B V m b m b s & & (42) 符合Lyapunov穩定性理論,所以此控制器可使系統達到漸近穩定。 圖4-2-8 基於倒階控制之積分型順滑模態控制器15
4.3 研究二之理論架構 4.3.1 順滑模態觀測器
順滑模態觀測器的理論是來自於非線性控制理論中的順滑模態控制(Sliding mode control) 理論。在介紹順滑模態觀測器首先介紹基本的全階觀測器(Full Order Observer),考慮一線性 系統如下
x
Ax Bu
y Cx
=
+
⎧
⎨
=
⎩
&
(4-3-1) 其中x 為狀態向量,u 為控制輸入而 y 為系統輸出,A、B 與 C 為不為零的常數矩陣且 C 為滿 秩(Full rank),由線性系統理論知若(C,A)是可觀測的(Observable)則此系統的狀態可以由以下 的全階觀測器估測之ˆ
ˆ
(
ˆ
)
x
&
=
Ax Bu L Cx y
+
+
−
(4-3-2) 其中ˆx&為估測的狀態向量,L 為不為零的常數矩陣,將(4-3-1)與(4-3-2)相減後得ˆ
(
)
e
&
=
A LC e
−
e x x
= −
(4-3-3) 根據線性系統理論可任意指定A-LC 的特徵值使得估測誤差 e 趨近於零,考慮以下的順滑模態 觀測器ˆ
ˆ
(
ˆ
)
x
&
=
Ax Bu Ksign y y
+
+
−
(4-3-4) 其中ˆy為估測輸出而K 為常數向量矩陣又稱為觀測器增益,觀察(4-3-2)與(4-3-4)可以發現它們 的差異在於順滑模態觀測器將全階觀測器的連續輸出誤差取代成不連續的符號函數,令 y=x,(4-3-4)之順滑模態觀測器變成:ˆ
ˆ
(
ˆ
)
x
&
=
Ax Bu Ksign x x
+
+
−
(4-3-5) 利用座標轉換可以推導永磁同步發電機在兩相靜止座標軸上的數學模型如下0
0
s sv
e
R
i
i
d
L
L
L
i
i
R
v
e
dt
L
L
L
α α α α β β β β⎡ ⎤ ⎡ ⎤
⎡
−
⎤
⎢ ⎥ ⎢ ⎥
⎢
⎥
⎡ ⎤
⎡ ⎤
=
⎢
⎥
+
⎢ ⎥ ⎢ ⎥
+
⎢ ⎥
⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢
⎥ ⎣ ⎦
⎣ ⎦
−
⎢ ⎥ ⎢ ⎥
⎢
⎥
⎣
⎦
⎣ ⎦ ⎣ ⎦
(4-3-6) 其中iα、iβ為發電機靜止兩相座標上的定子電流,vα、vβ為發電機靜止兩相座標上的定子電壓 而eα、eβ為發電機靜止兩相座標上的反電動勢可以表示成sin
cos
f e e f e ee
e
α βλ ω
θ
λ ω
θ
= −
=
(4-3-7) 由(4-3-5),則順滑模態電流觀測器之控制方程式如下16
1
ˆ
0
(
)
ˆ
ˆ
ˆ
ˆ
1
ˆ
(
)
0
s sv
R
sign i
i
i
i
d
L
L
K
L
v
R
i
dt i
sign i
i
L
L
L
α α α α α β β β β β⎡
⎤
⎡
−
⎤
⎡
−
⎤
⎢
⎥
⎡ ⎤ ⎢
⎥
⎡ ⎤
⎢
⎥
=
+
⎢
⎥
−
⎢ ⎥ ⎢
⎥
⎢ ⎥
⎢
⎥
⎢
⎥
⎢ ⎥
⎢ ⎥ ⎢
⎥
⎣ ⎦
⎢
⎥
⎣ ⎦
−
−
⎢
⎥
⎢
⎥
⎢
⎣
⎥
⎦
⎣
⎦
⎣
⎦
(4-3-8) 其中ˆiα與ˆiβ為靜止兩相座標定子電流估測值,同時取電流估測誤差iα與iβ為ˆ
ˆ
i
i
i
i
i
i
α α α β β β= −
= −
(4-3-9) 將(4-3-6)與(4-3-8)相減得1
0
( )
1
( )
0
s se
R
sign i
i
i
d
L
L
K
L
e
i
i
R
dt
sign i
L
L
L
α α α α β β β β⎡ ⎤
⎡
−
⎤
⎡
⎤
⎢ ⎥
⎢
⎥
⎢
⎥
⎡ ⎤
⎡ ⎤
=
⎢
⎥
+
⎢ ⎥
−
⎢
⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢
⎥
⎣ ⎦
⎢ ⎥
⎢
⎥
⎣ ⎦
−
⎢ ⎥
⎢
⎥
⎢
⎣
⎥
⎦
⎣
⎦
⎣ ⎦
(4-3-10) 在K 的作用下,電流估測誤差將趨近於零而(4-3-10)將變成( )
( )
e
Ksign i
z
e
Ksign i
z
α α α β β β≅
=
≅
=
(4-3-11) 其中zα與zβ為符號函數所切換出來的靜止兩相座標軸反電動勢估測值,取順滑函數為S
i
S
S
i
α α β β⎡ ⎤
⎡ ⎤
=
⎢ ⎥
= ⎢ ⎥
⎣ ⎦ ⎣ ⎦
(4-3-12) 其中Sα與Sβ為順滑函數,因此順滑模態電流觀測器的設計目的便是要藉著切換條件的輸入下 使電流估測誤差狀態軌跡進入S =[
0 0]
T 的順滑平面後產生順滑模態,最後估測誤差朝著平 衡點零趨近(
)
(
)
(
)
2 21
( )
1
( )
0
sR
SS
i
i
e i
Ki sign i
L
L
e i
Ki sign i
L
α β α α α α β β β β= −
+
+
−
+
−
<
&
(4-3-13) 當 K 滿足上式時除了滿足迫近順滑條件之外也能確保此順滑模態觀測器為漸進穩定,由 (4-3-13)知選取的順滑函數若要滿足迫近順滑條件 K 的大小必須滿足(
)
max
,
K
≥
e
αe
β (4-3-14) 然而由(4-3-11)得到的反電動勢估測值為不連續,必須經過低通濾波器後才能得到連續反電動 勢估測值eˆ 與α eˆβ,此低通濾波器H(s)的轉移函數可設計為17
( )
c cH s
s
ω
ω
=
+
(4-3-15) 其中 ωc為截止角頻率,將連續反電動勢估測值搭配(3-19)可以推得永磁同步發電機電氣角估 測值θˆe為 1ˆ
ˆ
tan
ˆ
ee
e
α βθ
= −
−⎛
⎜
⎞
⎟
⎜
⎟
⎝
⎠
(4-3-16) 引入低通濾波器會造成估測的位置值相位落後真實值,因此需要加上角度補償如 1ˆ
tan
e e cω
θ
ω
−⎛
⎞
∆ =
⎜
⎟
⎝
⎠
(4-3-17) 其中∆θe為補償的角度而ωˆe為電氣角速度估測值,最後的轉子位置估測值θˆ 為 mˆ
ˆ
e e mP
θ
θ
θ
=
+ ∆
(4-3-18) 其中P 為發電機極對數為極數的一半,將(3-30)代入下式可得發電機轉速ˆ
ˆ
d
mdt
θ
ω
=
(4-3-19) 順滑模態電流觀測器結構圖如圖4-3-1 虛線方塊中所示。+
−
+
+
i
αβ vαβˆi
αβ ˆeαβ ˆ e θ e θ ∆ˆ
ω
i
αβ zαβ 1 P ˆ m d dt θ ˆ m θ 圖4-3-1 順滑模態轉速觀測器結構圖 為了使上述數學模型能應用於DSP 數位訊號處理器中,在此將(4-3-8)離散化為 1 1ˆ
(
1)
ˆ
( )
ˆ
ˆ
(
1)
( )
s si n
i n
KT
A
B T
Z
i n
L
i n
α α β β⎡
+
⎤
⎡
⎤
=
+
−
⎢
⎥
⎢
⎥
+
⎢
⎥
⎢
⎥
⎣
⎦
⎣
⎦
(4-3-20)18 其中Ts為取樣時間,n 為正整數,A1、B1與Z 定義如下: 1 1 0 1 0 s s s s R T L A R T L ⎡ − ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎣ ⎦ , 1 ( ) ( ) v n L B v n L α β ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ , ˆ ( ( ) ( )) ˆ ( ( ) ( )) sign i n i n Z sign i n i n α α β β ⎡ − ⎤ = ⎢ − ⎥ ⎢ ⎥ ⎣ ⎦ 而(4-3-15)的低通濾波器則離散化如下
(
1)
( ) 2
c[ ( )
( )]
o n
+ =
o n
+
π
f i n
−
o n
(4-3-21) 其中o(n)為濾波器輸出而 fc與i 分別為截止頻率與濾波器輸入。 4.3.2 永磁同步發電機向量控制理論透過磁場向量控制(Filed Oriented Control)[27]理論將永磁同步發電機中非線性且彼此耦 合的部分轉換成線性解耦控制,而藉由解耦後直交軸的電流控制迴路達到控制發電機轉速的 目的,電流迴路中的直軸電流迴路如圖4-3-2 所示。 * 0 d i =
+
−
+ −
* dv
i
d 圖4-3-2 直軸電流迴路方塊圖 由於直軸電流不影響表面黏附式的永磁同步發電機電磁轉矩,因此將圖 4-3-2 中直軸電 流命令設為零將可得到最大電磁轉矩,至於圖4-3-2 中的虛線方塊為耦合項其中含轉速成分, 然而在風力發電機轉速不快的條件下可忽略此耦合項,圖 4-3-3 為交軸電流迴路同樣的虛線 方塊中的耦合項在此也可忽略。速度迴路則如圖4-3-4 所示,由圖 4-3-4 知轉速控制與交軸電 流迴路有直接的關聯,圖4-3-2 至圖 4-3-4 中所有迴路中的比例積分控制器其比例增益與積分 增益皆由觀察響應圖形而做適當的調整。 * q i + − + − * q vω
e ω qi
L T + − 圖4-3-3 交軸電流迴路方塊圖19 *
ω
+
−
* q iω
圖4-3-4 速度迴路方塊圖 4.4 研究三之理論架構 4.4.1 阻抗源變流器建模 阻抗源變流器在傳統的電壓源變流器前端加入阻抗電路,阻抗電路由兩個電容及電感構成, 如圖4-4-1 圖4-4-1 阻抗源變流器 阻抗源變流器除了包含傳統電壓源變流器之六個主動向量(active vector)、兩個零相量(zero vector),另外包含一個零向量,此稱為短路向量(shoot-through vector),短路向量可使負載端的某 一相上下開關皆導通,造成負載端短路,或兩相、三相皆短路,根據文獻[5],阻抗電路內電容 之電壓可表示成 1 2 1 1 2 st c c c dc st D V V V V D − = = = − (4-4-1) st st T D T = (4-4-2) 因為對稱性原則,阻抗電路內電感值和電容值兩兩相等,Dst為短路狀態之責任周期,T為開關切 換周期,Tst為切換周期內之短路時間,VSI的輸入端電壓為 Vi =BVdc (4-4-3) 1 1 1 1 2 st st T B T T T T = = ≥ − − (4-4-4) T T= st +T1 (4-4-5) 其中B為昇壓因數,T1為開關切換週期內六個主動向量及兩個零向量作用時間,在昇壓模式下, 輸出的三相電壓峰值為 2 dc ac V V =M B⋅ ⋅ (4-4-6) M為調變指數,圖4-4-2、圖4-4-3為阻抗源變流器兩個運作模式,當變流器運作於六個主動向量20 時,等效電路如圖九,其中兩個零向量作用時,Ii為零。當變流器運作於短路向量時,等效電路 如圖4-4-3。 圖4-4-2 阻抗源變流器非短路向量運作模式 圖4-4-3 阻抗源變流器短路向量運作模式 4-4-2 阻抗源變流器短路區間產生方法 以傳統向量空間調變為基礎,在零向量區間加入短路時間Tst/6,最大的短路時間可增加至 (3/4)T0,如圖4-4-4,電壓增益(MB)與調變指數(M)的關係如圖4-4-5,功率開關承受應力與電壓增 益關係為圖4-4-6。此方法可以DSP數位訊號處理器實現。 圖4-4-4 改良型SVPWM
21 圖4-4-5 電壓增益與調變指數關係 456 圖4-4-6 功率開關應力與電壓增益關係 4-5 研究四之理論架構 4-5-1 系統架構 葉片應變量測系統架構如圖4-5-1,虛線代表訊號傳輸路徑,實線代表電源供給路徑,如 圖所示由應變規量測到的應變訊號經由訊號處理(Signal Conditioning)後用 Zigbee 參考節點 (Reference node)將訊號轉換成數位訊號再以無線技術發射,Zigbee 接收模組(Coordinator)接收 訊號將此訊號經由USB 傳入電腦,以 LabView 軟體將電壓訊號顯示在電腦上。整個應變感 測及訊號處理系統電源供應方式以充電式鋰電池提供,此外本論文設計能量採集系統(Energy Harvesting)持續對電池充電,讓整個系統達到電量自給的目的。 圖4-5-1 葉片應變量測系統架構 4-5-2 無線感測系統 Zigbee 是一種短距離、低成本、低功率雙向傳輸、與精簡架構等之無線通訊技術。與其他
22 無線傳輸技術比較,Zigbee 主要在用於低速傳輸,使其傳輸資料量亦少,所以收發時間短, 其次在非工作模式時,Zigbee 處於睡眠模式,一般睡眠啟動時間只有 15ms,而設備搜索時間 為30ms,使得 Zigbee 非常省電,電池使用壽命可達數月至數年之久,而傳輸距離較 RFID 遠, 所以Zigbee 適合用於資料傳輸(如:溫度、濕度、應變點監測)而非影音資料的傳送。 4-5-3 能量採集設計 本研究對於葉片應變感測系統電源供應採用鋰電池供給,針對風力發電機若架設於偏遠 地區其電池更換不易,為了維持系統工作狀態減少電池更換次數,設計電源自給系統持續提 供鋰電池電源。能量採集系統設計參考手錶人動電能(Kinetic)設計(圖 4-1),利用人運動產生 的動能讓擺陀轉動以此產生電能對電池充電。以風力發電機旋轉動能搭配擺陀機構設計能量 採集系統(圖 4-5-3(a)、圖 4-5-3(b))。 圖4-5-2 人動電能設計 (a)風力發電機 (b)風機鼻頭內部圖 圖4-5-3 能量採集設計 能量採集設計如圖4-5-3(a)設置於風力發電機鼻端內部,圖 4-5-3(b)為鼻端內部構造,結 構設計為使用一塊圓板(Board)安裝在風力發電機的鼻端作為基板其圓板裝載除了無線感測節 點以及訊號處理系統外,還設置能量採集系統。能量採集設計參考手錶人動電能設計,當擺 陀產生旋轉達成生電。此研究採用相反設計,主要利用微型發電機機體旋轉產生電能。安裝 一個微型發電機(Micro Generator)於圓板上,利用風力發電機啟動後產生的旋轉讓帶動微型發 電機同步旋轉,微型發電機之軸銲接上一金屬重塊擺陀(Metal block),在微型發電機旋轉時利 用擺陀的重力讓擺陀往下擺盪,達成發電機軸與發電機本身產生相對轉動而發電。
23
五、結果與討論(含結論與建議)
5.1 研究一之結果與討論 5.1.1 實驗架設平台 圖 5.1 永磁同步風力發電機實驗平台 圖 5.2 實驗整合電路 5.1.2 實驗及模擬結果 圖5.3 轉速響應實驗圖(使用 PI 與倒階控制器比較兩者響應圖) 圖5.4 轉速響應模擬圖(使用 PI 與倒階控制器比較兩者響應圖)24 圖5.5 使用倒階控制的發電機轉速 圖5.6為基於倒階控制法則之積分型順滑模態控制與只有使用倒階控制之比較圖,綠線為只 使用倒階控制,紅線為基於倒階控制法則之積分型順滑模態控制,在0.1秒時加入弦波做為外界 干擾,可以看出兩者擁有相同的系統響應,圖5.7為將圖七部分放大顯示,綠線為只使用倒階控 制,紅線為基於倒階控制法則之積分型順滑模態控制,可看出兩者之中使用基於倒階控制法則之 積分型順滑模態控制的紅線,在0.1秒出現外界干擾時,明顯的抑制外界干擾。 圖5.6 使用倒階加上順滑模態控制的發電機轉速 圖5.7順滑模態控制抑制外界干擾 5.1.3 討論 本研究所設計之控制器,考慮到永磁同步發電機的風力發電系統複雜和不確定性,加上輸入風速 的變動,造成系統具有非線性的特點,使用基於倒階控制法則之積分型順滑模態控制器,此控制器能 確保系統在各種變動風速下,皆能達到漸近穩定,由實驗及模擬結果可以看出本文所使用之控制器對 於外界干擾有非常好的強健性,並且能快速追蹤到風速,使系統快速響應,達到良好的發電效率。
25 5.2 研究二之結果與討論 5.2.1 實驗架設平台 圖5-8 永磁同步發電機轉速估測與控制實驗架構 圖5-9 永磁同步發電機轉速估測與控制實驗硬體架構 5-2-2 實驗與模擬結果 圖5-10 任意調整發電機轉速時的真實轉速與估測轉速 圖 5-10 為轉速命令為 300rpm 時的轉速響應圖,由此圖可以計算出響應超越百分比約為 17%,而從程式中斷時間搭配圖表可計算出上升時間及安定時間分別為 0.05 秒與 0.4 秒,比 較有無轉速感測的響應發現兩者大致相同,差別僅在於無轉速感測的轉速會在有轉速感測的 轉速附近抖動。
26 圖5-11300rpm 命令下的轉速響應 圖 5-12 為 300rpm 命令下時直軸電流迴路的控制情形,觀察此圖知不論有無轉速感測其 穩態皆能達到直軸命令等於零的需求,在未加入控制時無轉速感測控制的直軸電流其抖動現 象較具轉速感測時較為明顯。 圖5-12 300rpm 命令下的直軸電流響應 至於有無轉速感測時交軸電流迴路的響應分別如圖 5-13 與圖 5-14 所示,由這兩張圖可 以看出兩者的交軸迴授電流皆能在穩態時追蹤到各自的交軸電流命令,而它們之間的差異由 交軸電流的命令響應可以看出無轉速感測控制的交軸電流命令會在有轉速感測的命令附近抖 動如圖5-15 所示,而同樣的在未加入控制時無轉速感測控制的交軸電流其抖動現象較具轉速 感測時較為明顯。 圖5-13 300rpm 命令下具轉速感測控制的交軸電流響應
27 圖5-14 300rpm 命令下無轉速感測控制的交軸電流響應 圖5-15 300rpm 命令下交軸電流命令響應 5.2.3 討論 本研究將順滑模態觀測器的理論應用於直驅式可變速風力發電機的轉速估測與轉速控 制,發電機電性參數中直交軸電感值的量測能確保直軸電流為零控制策略能應用在實驗中的 200W 永磁同步發電機。在電壓回授上利用數學運算將無法量測的相電壓值由線電壓轉換出 來,其運算結果從程式內部所紀錄的波形證明與真實相電壓大小一致且同步。轉速估測實驗 結果顯示在定轉速與任意轉速時轉速估測值皆能收斂於真實值的附近抖動,符合理論中的切 跳現象,而模擬結果也顯示在變動風場下估測值對真實值具有良好的追蹤能力。當以飽和函 數取代符號函數時證明了其改善切跳現象的能力。在程式中特定時間改變發電機定子電阻值 模擬真實系統的參數改變狀況,實驗結果證明了順滑模態觀測器的強健性。轉速控制實驗結 果顯示當轉子位置補償得宜時,無轉速感測控制與有轉速感測控制的差異僅在於切跳現象的 產生。將轉速估測值以數據表示並將其搭配市面上風力發電機之有功轉速範圍後推論出本研 究所使用的順滑模態觀測器適用於5kW 以下的小型風力發電系統。 5.3 研究三之結果與討論 5.3.1 實驗架構 硬體部分包括永磁同步發電機、二極體整流器、Z-source變流器、MOSFET驅動電路、驅動電源、 數位訊號處理器DSP(TMS320F2812)。實驗整體架構如圖5-16,利用直流馬達帶動永磁同步發電機, 模擬風力發電系統,以二極體整流,並以Z-source變流器連接至三相負載。 圖5-16 風力發電硬體實作
28 圖5-17 實驗量測電壓與電流示意圖 5.3.2 實驗結果 圖5-18 改良式 SVPWM 輸出 PWM1-PWM4 訊號 圖5-19 改良式 SVPWM 輸出 PWM3-PWM6 訊號 圖5-20 含短路區間之上下臂PWM訊號
29 圖5-21 昇壓之線電壓(輕負載) 圖5-22 昇壓之相電壓(輕負載) 5.3.4 討論 本研究以200W 小型風力發電機為研究載具,設計製作以二極體整流之交流-直流轉換器 及阻抗源變流器為直流-交流轉換器的架構。實驗分成兩個部分,在傳統電壓源變流器實驗 中,其驅動電路、全橋變流器硬體部分,在電源轉換的過程中扮演重要的角色,以弦式脈寬 調變或是空間向量調變,電壓源變流器的運作與輸出電壓大小、電流皆與模擬結果符合,實 驗結果顯示,當調制超出了線性範圍的區域,電壓與電流產生變形,不再是正弦波波型,電 壓源變流器輸出電壓大小有先天上的限制。而且一般電壓源變流器為避免短路而加入盲時, 實驗加入盲時確實造成了電流的畸變,與模擬結果符合。為了減少全橋變流器中功率開關元 件所受到的電壓突波,實驗中製作的緩衝電路,確實消除部分電壓突波,使power MOSFET 使用的安全範圍更大。在阻抗源變流器的實驗中,從DSP 輸出 port 量測得到的 PWM 短路時 間如程式預設,且均勻的分佈於一個切換週期內,與理論接近。實驗結果顯示,當以較重的 負載(電阻負載 8 歐姆)實驗,直流鏈電壓昇壓而且同時具有短路的狀態(直流鏈電壓為零),符 合預期中的結果,得到的輸出交流電壓也有昇壓的情形,與模擬結果比較,交流電壓和直流 鏈電壓大小均符合理論值,而實驗直流鏈電壓和交流電壓大小較理論值小。當以較輕的負載 實驗時(電阻負載 50 歐姆),實驗直流鏈電壓和交流電壓大小較接近理論值,而模擬阻抗源變 流器以較輕的負載實驗時,直流鏈電壓和交流電壓均大於理論值,因此觀察到阻抗源變流器 對不同負載的昇壓能力不盡相同,有負載適應性的問題。
30 5.4 研究四之結果與討論 5.4.1 實驗架構 實體電路安裝於風力發電機機鼻上其架設設計如圖 5-23 所示,將電路劃分為三層,最底 層為訊號處理層負責將葉片感應到的訊號轉換為電壓訊號並以無線技術傳輸,中間層為電源 管理層負責提供系統電源供給以及處理能量採集充電技術,最上層為能量採集設計,此設計 利用擺陀機構在風力發電機運轉下使能量採集層上的微型發電機與其軸產生相對轉動而達到 發電目的。 圖 5-23 系統架設示意圖 圖5-24 儀器架設 圖5-25 風機架設
31
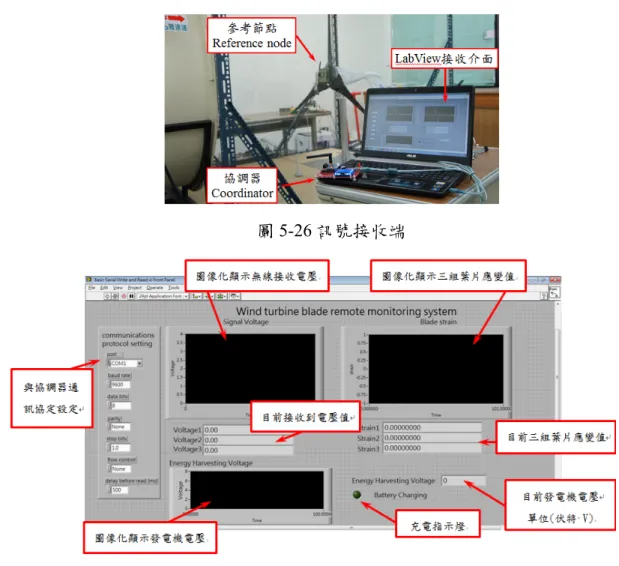
圖5-26 訊號接收端
圖5-27 LabView 接收介面
5.4.2 實驗結果
本實驗採用Zigbee 無線技術,利用風力發電機鼻頭上的參考節點(Reference node)傳輸三 組葉片應變訊號以及微型發電機發電量,如圖5-28 所示三組葉片貼上三種不同色膠帶對應 LabView 軟體中圖像化顯示的三種色線(圖 5-29)。
32 圖5-29 無線傳輸實驗 LabView 接收介面 充電電路由能量採集層中擷取電壓,通過升壓電路使得微型發電機發電量在低於電池電壓 (4.2V)情況能持續對鋰電池充電,升壓後的電壓利用充電電路讓系統能持續且穩定的輸出 4.2 伏特電壓對鋰電池充電。 圖 5-30 微型發電機轉速與發電量關係圖 圖5-31(a)鋰電池充電前電壓 2.88V
33 圖5-31(b)充電七小時電壓 3.64V 5-4-3 討論 本研究的主要目的為設計葉片應變無線監控系統結合自充式電源採集技術,利用遠距離 即時監控介面隨時了解風力發電機葉片應變情況,並在超過葉片應變狀態提出警告,停止風 機運轉,避免風力發電機損毀。而目前完成了葉片應變無線監控系統、自充式能量採集系統 實驗以及其系統架設。葉片應變無線監控系統中感測應變靈敏度可由使用者利用軟體設定, 此外電腦監控介面可即時接收三組應變訊號以及能量採集技術中所擷取的電壓大小,在擷取 電壓達到3V 時系統充電指示燈變亮起顯示目前系統電源正在充電。自充式電源採集技術完 成設計及架設,在風力發電機運轉轉速達到116rpm 時其發電量達到充電標準並對系統進行充 電。
34
參考文獻
[1] K. Goh, M. Dunnigan, and B. Williams, “Robust chattering-free (higher order)sliding mode control for a vector-controlled induction machine,” in Proc. 5th AsianControl Conf.,
Melbourne, Australia, Jul. 2004, pp. 1362–1370.
[2] Brice Beltran, Tarek Ahmed-Ali, and Mohamed El Hachemi Benbouzid,“High-Order Sliding-Mode Control of Variable-Speed Wind Turbines,” IEEETransactions on Industrial Electronics, VOL. 56, NO. 9, September 2009
[3] F. Valenciaga and P. F. Puleston, “High-Order Sliding Control for a Wind Energy Conversion System Based on a Permanent Magnet Synchronous Generator,” IEEE Transactions on Energy Conversion, VOL. 23, NO. 3, September 2008
[4] Fernando Castanos and Leonid Fridman, “Analysis and design of integral sliding manifolds for systems with unmatched perturbations,” IEEE Transactions on Automatic Control, VOL. 51, NO. 5, May 2006
[5] Wen-Jun Cao and Jian-Xin Xu, “Nonlinear Integral-Type Sliding Surface for Both Matched and Unmatched Uncertain Systems,” IEEE Transactions on Automatic Control, VOL. 49, NO. 8, August 2004
[6] Jinpeng Yu, Junwei Gao, Yumei Ma, and Haisheng Yu, “Adaptive Fuzzy Tracking Control for a Permanent Magnet Synchronous Motor via Backstepping Approach,”Hindawi Publishing Corporation, Mathematical Problems in Engineering,Volume 2010, Article ID 391846, 13 pages
[7] X. Liu, G. Gu, and K. Zhou, “Robust stabilization of MIMO nonlinear systems by backstepping,” Automatica, vol. 35, no. 5, pp. 987–992, 1999.
[8] J.-H. Hu and J.-B. Zou, “Adaptive Backstepping Control of Permanent Magnet Synchronous Motors with Parameter Uncertainties,” Control and Decision,VOL. 21,NO. 11,2006
[9] A.L. Nemmour, F. Mehazzem , A. Khezzar , M. Hacil , L. Louze , R. Abdessemed ,
“Advanced Backstepping controller for induction generator usingmulti-scalar machine model for wind power purposes,” Renewable Energy 35 ,pp. 2375-2380 ,2010
[10] Shun-Sheng Ke and Jung-Shan Lin, “Sensorless Speed Tracking Control with Backstepping Design Scheme for Permanent Magnet Synchronous Motors,” 2005 IEEE Conference on Control Applications, Toronto, Canada, Aug.2005
[11] Junqi Wang; Yundong Ma; Zurong Hu; Xing Yang, “Modeling and Real-time Simulation of Non-grid-connected Wind energy Conversion System”, IEEE World Non-Grid-Connected Wind Power
and Energy Conference, pp. 1–5, Sep. 2009。
[12] Jemaa Brahmi, Lotfi Krichen, Abderrazak Ouali, ‘‘A Comparative Study between Three Sensorless Control Strategies for PMSG in Wind Energy Conversion System,’’ Applied
Energy., vol. 86, issue 9, pp. 1565-1573, Sep. 2009.
35
Sliding Mode Current Observer,’’ Advanced Materials Research., vol. 383-390, pp. 329-336, Nov. 2011.
[14] L.G. Gonzalez, E. Figueres, G. Garcerá, O. Carranza, Fran González-Espín, ‘‘Synchronization Techniques Comparison for Sensorless Control applied to Wind Energy Conversion Systems,”
IEEE 13th European Conference on. Power Electronics and Applications, pp. 1-9, Sep. 2009.
[15] F.Z.Peng, “Z-source inverter” , IEEE Trans. Industry. Application., vol.39, no.2,pp. 504–510, March/April. 2003。
[16] Dehghan, S.M., Mohamadian, M., Varjani, A.Y., “A New Variable-Speed Wind Energy Conversion System Using Permanent-Magnet Synchronous Generator
and Z-source Inverter”, IEEE Transactions on Energy conversion ,vol.24,no.3,pp.714-724, sep.2009。
[17] 徐椿樑,許藤耀,吳維彬,陳威頴,林瑋恒 “小型風力發電系統之遠端監控傳輸系統介面設計 與研製”
[18] 傅鶴齡,張偉強,游書銘“風力發電機遠端監控及資料擷取系統”2010臺灣風能學術研討會 [19] Chia Chen Ciang, Jung-Ryul Lee,Hyung-Joon Bang“Structural health monitoring for a wind
turbine system: a review of damage detection methods”Meas. Sci. Technol. 19 122001
[20] P. Kulha, M. Husak“Piezoresistive Sensor for Strain Measurement on Turbine Blade with Wireless Telemetry Data Acquisition”International Conference on Renewable Energies and Power Quality,ISSN 2172-038,No.9,12thMay 2011
[21] R. Andrew Swartz, Jerome P. Lynch, Bert Sweetman, Raimund Rolfes, and Stephan Zerbst“Structural Monitoring of Wind Turbines using Wireless Sensor Networks”Smart Structures and Systems, Vol. 6, No. 3, 2010
[22] Yen Kheng Tan “Self-Autonomous Wireless Sensor Nodes With Wind Energy Harvesting for Remote Sensing of Wind-Driven Wildfire Spread” IEEE Transactions on Instrumentation and Measurement, pp.1367 – 1377, April 2011
[23] Emilio Sardini “Self-Powered Wireless Sensor for Air Temperature and Velocity Measurements With Energy Harvesting Capability” IEEE Transactions on Instrumentation and Measurement, pp.1838- 1844,May 2011
[24] A.F. Flippov, Differential Equations with Discontinuous Righthand Sides, first edition, Springer, 1988. [25] J.E. Slotine, S.S. Sastry, ‘‘Tracking Control of Nonlinear Systems Using Sliding Surfaces with
Applications to Robot Manipulators,’’ Int. J. Control, Vol. 38, pp. 465-492, 1983. [26] J.E. Slotine, Weiping Li, Applied Nonlinear Control, Prentice-Hall, 1991.
[27] 劉昌煥,交流電機控制:向量控制與直接轉矩控制原理,東華書局,中華民國九十一年。
[28] 亞德諾(Analog Devices)公司 [29] 美信(MAXIM)公司
[30] 笙泉科技(Megawin)
36
[32] 江國維,“基於倒階法則之積分型順滑模態控制應用於可變速風力發電機 Integral-Type Sliding Mode Control of Variable-Speed Wind Turbine via Backstepping Approach“ 國立交 通大學 機械工程學系碩士論文 中華民國101年6月
[33] 曾炫錡,“順滑模態觀測速度控制應用於無轉速感測之直驅式可變速風力發電機 Sliding Mode Observer for Sensorless Control of Direct-driven Variable Speed Wind Generator“ 國 立交通大學 機械工程學系碩士論文 中華民國101年5月
[34] 歐咨宏,“風力機葉片應變之遠端監控系統結合自充式電源採集技術研究 Blade Strain Sensing with Wireless Data Acquisition Powered by Micro Generator Energy Harvesting for Wind Turbine System“國立交通大學 機械工程學系碩士論文 中華民國101年6月
[35] 黃靖哲 “阻抗源變流器之電力轉換研究 The Study of Z-source Inverter for Power conversion“ 國立交通大學 機械工程學系碩士論文 中華民國101年7月
[36] Hsuan-Chi Tseng and Stone Cheng “Robust Sensorless Control of PMSG with MRAS in Variable Speed Wind Energy Conversion System” The 2011 IEEE International Conference on Mechatronics and Automation (ICMA 2011)
[37] Stone Cheng and Hsuan-Chi Tseng “H∞ Sensorless PMSG Control with Sliding Mode Observer in Variable Speed Wind Energy Conversion System” The UKACC International Conference on Control 2012.
37