互動式全域照明 – 可變動的光源位置
54
0
0
全文
(2) 互動式全域照明 - 可變動的光源位置 Interactive Global Illumination : varying positions of the light source. 研 究 生:林駿豪. Student:Chun-Hao Lin. 指導教授:李嘉晃. Advisor:Chia-Hoang Lee. 國 立 交 通 大 學 資 訊 科 學 系 碩 士 論 文. A Thesis Submitted to Department of Computer and Information Science College of Electrical Engineering and Computer Science National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master In Computer and Information Science June 2005 Hsinchu, Taiwan, Republic of China. 中華民國九十四年六月.
(3) 互動式全域照明 – 可變動的光源位置. 學生 : 林駿豪. 指導教授:李嘉晃 博士. 國立交通大學電機資訊學院. 資訊科學研究所碩士班. 中文摘要. 對於互動式全域照明(Interactive Global Illumination)計算,本篇論文提 出結合光子圖(Photon Map)及多項式貼圖(Polynomial Texture Map)方法用來加 速繪製場景(Scene)當其光源位置變動時的照度計算。為了結合上述兩種方法,我 們提出以光子密度為單位的光子密度圖(Photon Density Map)及儲存方程式係數 的多項式照度圖(Polynomial Illumination Map)來達成此目的。 在場景照明計算上,我們採用光子映射法(Photon Mapping),由光源向場景 發散光子及進行追蹤,並將光子記錄於光子圖中。其後,將場景進行空間等量分 割,計算空間中取樣點的光子密度並儲存於光子密度圖中。我們取樣光源移動的 位置空間,完成所有光子密度圖的收集,將光子密度變化和光源位置的關係,以 三次方多項式逼近其結果,並將係數記錄於多項式照度圖中。在彩現(Rendering) 場景上,我們採用反向光跡追蹤(Backward Ray Tracing)方式,將與場景中物體 產生交點的光子密度經由多項式照度圖還原。如此在光源變動至新位置時,便不 用重新發散光子,達到加速場景照度計算之目的。. 關鍵字:光子映射法、多項式貼圖法、光子密度圖、多項式照度圖、照度估計、 全域照明 i.
(4) Interactive Global Illumination : varying positions of the light source 英文摘要. Student : Chun-Hao Lin. Advisor:Prof. Chia-Hoang Lee. Department of Computer and Information Science National Chiao Tung University. Abstract Although global illumination can offer realistic effect for scene rendering, most of the techniques require vast amount of computations as well as tremendous amount of time for rendering. Thus it is still not applicable for interactive or real time applications. In this thesis, we propose a method which can compute global illumination for complex scenes very efficiently even when the position of light source is dynamically changing. The method uses a polynomial illumination map to approximate the shading of the scene for all possible positions of light source. The construction of the polynomial illumination map is based on the photon density map which is derived from traditional photon map.. Keywords:Photon Mapping、Polynomial Texture Maps、Photon Density Map、 Polynomial Illumination Map、Illumination Estimation、Global Illumination ii.
(5) 誌謝. 本論文得以順利完成,首先要感謝的是指導教授李嘉晃老師,他在我的研究 領域上給予充分的發展空間,讓我能在感興趣的課題上潛心研究,其嚴謹認真的 研究態度及細心的指導,讓我在兩年的研究過程中受益良多。其次要感謝口試委 員王勝德教授、李肇林教授以及莊榮宏教授的指正與建議,使得本論文能更加的 充實完善。 接著,我要感謝實驗室的學長、同窗及學弟們對我的關心及幫助,尤其是黃 明超、高鳴遠、蔡沛言、張佑銘、林建良、劉開國、許志高、江柏頡等幾位,豐 富了我在實驗室中的生活,和你們在一起歡樂的日子我不會忘記。此外,我還要 感謝我的朋友劉先能及陳雅萍,在我研究所生活上提供很大的幫助及建議,還有 微奇科技孫智豪先生給予我在工作時間很大的彈性,讓我能順心的在學術上從事 研究。 最後,我要感謝我的摯愛育芳及家人,謝謝你們的支持及照顧是我努力完成 學業最大的原動力。謹以此篇論文獻給育芳、我的家人和初生女兒昕穎。. iii.
(6) 目錄 中文摘要............................................................................................................................i 英文摘要...........................................................................................................................ii 誌謝..................................................................................................................................iii 目錄..................................................................................................................................iv 圖目錄..............................................................................................................................vi 表目錄.............................................................................................................................vii 第一章 、緒論.................................................................................................................1 1.1 研究動機.......................................................................................................1 1.2 研究目標與構想...........................................................................................2 1.3 論文章節安排...............................................................................................2 第二章 、相關研究.........................................................................................................3 2.1 概述...............................................................................................................3 2.2. 光跡追蹤法...................................................................................................3 2.2.1 正向光跡追蹤 (Forward Ray Tracing)............................................5 2.2.2 反向光跡追蹤 (Backward Ray Tracing) .........................................5 2.2.3 雙向光跡追蹤 (Bi-directional Ray Tracing) ...................................6 2.3 光子映射法 (Photon Mapping) ...................................................................7 2.3.1 建立光子圖.......................................................................................7 2.3.2 場景彩現...........................................................................................9 2.4 多項式貼圖法 (Polynomial Texture Maps) .............................................. 11 2.4.1 影像拍攝......................................................................................... 11 2.4.2 多項式參數計算.............................................................................12 2.4.3 影像重建.........................................................................................13 第三章 、多項式照度圖...............................................................................................15 3.1 整體架構.....................................................................................................15 3.2 前置處理.....................................................................................................16 3.2.1 移動光源.........................................................................................16 3.2.2 發散光子.........................................................................................16 3.2.3 建立光子圖.....................................................................................17 3.2.4 建立光子密度圖.............................................................................19 3.2.5 建立多項式照度圖.........................................................................24 3.3 動態執行處理.............................................................................................27 3.3.1 重建光子密度圖.............................................................................27 3.3.2 場景繪製.........................................................................................27 3.4 多照明光源應用.........................................................................................30 第四章 、實作過程與結果討論...................................................................................31 iv.
(7) 4.1 4.2. 實驗說明.....................................................................................................31 多項式全域照明計算結果.........................................................................31 4.2.1 實驗一:單一照明光源場景測試.................................................31 4.2.2 實驗二:多照明光源場景測試.....................................................35 4.2.3 三次方多項方程式近似結果.........................................................36 4.3 測試場景彩現結果.....................................................................................37 第五章 、結論...............................................................................................................41 5.1 研究總結.....................................................................................................41 5.2 未來工作.....................................................................................................42 參考文獻.........................................................................................................................43. v.
(8) 圖目錄 圖 1 正向光跡追蹤..........................................................................................................5 圖 2 反向光跡追蹤..........................................................................................................6 圖 3 雙向光跡追蹤..........................................................................................................6 圖 4 不同的光源類型......................................................................................................7 圖 5 漫射表面反射光子情形..........................................................................................8 圖 6 場景中不同的物體反射光子的情形......................................................................9 圖 7 場景進行光子收集..................................................................................................9 圖 8 投影至平面光子收集............................................................................................10 圖 9 光子映射法的場景彩現........................................................................................ 11 圖 10 多項式貼圖法取像設備......................................................................................12 圖 11 像素照度變化的收集..........................................................................................12 圖 12 圖 13 圖 14 圖 15 圖 16 圖 17 圖 18 圖 19 圖 20 圖 21 圖 22 圖 23 圖 24 圖 25 圖 26 圖 27 圖 28 圖 29 圖 30 圖 31 圖 32 圖 33. 系統流程架構......................................................................................................15 建立光子圖流程..................................................................................................18 取樣空間內進行光子密度的計算......................................................................19 場景空間等量分割..............................................................................................20 場景計算完成光子密度圖..................................................................................20 光子圖彩現的結果..............................................................................................21 光子密度圖彩現的結果......................................................................................21 收集所有光源取樣位置的光子密度圖..............................................................22 建立光子密度圖流程..........................................................................................23 建立多項式照度圖流程......................................................................................26 還原計算光子密度圖..........................................................................................27 計算交點的光子密度..........................................................................................28 場景彩現流程......................................................................................................29 多照明光源的計算..............................................................................................30 程式實驗執行流程..............................................................................................33 場景中不同的取樣cell的多項式結果圖 ............................................................36 寺廟場景上前方的觀察角度的照度變化情形..................................................38 寺廟場景側方向觀察角度的照度變化情形......................................................38 寺廟場景斜方向觀察角度的照度變化情形......................................................38 修道院場景前方的觀察角度的照度變化情形..................................................40 修道院場景斜方向觀察角度的照度變化情形..................................................40 修道院場景右方向觀察角度的照度變化情形..................................................40. vi.
(9) 表目錄 表1 表2 表3 表4 表5 表6 表7. 程式開發環境........................................................................................................31 實驗測試環境........................................................................................................32 實驗測試場景........................................................................................................32 測試場景進行光源取樣及空間分割的數據........................................................34 測試場景進行前處理計算及彩現階段所花費的時間........................................34 不同的彩現方式計算時間比較............................................................................35 數值顯示場景光源增加所造成的繪圖速度減慢程度........................................35. vii.
(10) 第一章、緒論 1.1. 研究動機 電腦繪圖的真實感是電腦圖學研究領域所追求的重要目標之一,若要提高場. 景(Scene)繪圖的真實度,全域照明(Global Illumination)的計算便顯得十分的重要。 然而大多數的技術均需要大量的計算,且彩現(Rendering)顯像相當費時,因此,在 互動性的操作或是需要即時彩現時,便產生應用上的困難。 全域照明計算係指模擬場景中所有光源發散、反射及折射等現象,以產生真 實的彩現品質為一重要關鍵。常見的計算方法包含路徑追蹤(Path Tracing)方式 [JEN95] [LW93] [LW96] [VG94]、能量幅射(Raiosity)方式[HSA91] [DFD93] [JMLD99]、光粒子(Photon)方式[JEN96] [JEN97] [JEN01]等。其中,以光粒子為基 礎的光子映射法(Photon Mapping) [JEN96]為一有效率的方法且可以提供非常真實 的場景照度效果。然而,計算過程中需要發散大量的光子並且對每一個光子的路 徑進行追蹤,是一項十分費時的計算,尤其每當場景產生變動時就要對光子散發 重新計算,因此並不適合應用於需即時顯現的互動操作模式。在 Image-based rendering 領域中,提出對於場景光源改變進行有效率的彩現技術如[TSH97] [DHT_00] [EHY95] [MGW01]等。其中,多項式貼圖法(Polynomial Texture Maps) [MGW01]採用方程式計算的方式,對貼圖影像上的每一個像素以一個二次多項式 來表示其光源位置變化後的照度值,允許在不同的光源方向下產生高品質照片般 的貼圖影像,可以應用於快速的互動操作。 為了達到互動式的全域照明計算,近年之來研究有幾個方向:[WBS03]主要在 多光源應用於複雜的場景。這個方法為首先估算出每個視野中最重要的光源,在 彩現時僅處理這些光源的路徑追蹤即可。[WKB_02]則使用平行處理加速計算互動 式全域照明所需的大量計算。另外,[PDC_03] [WS03]著重在使用繪圖硬體架構加 速光子映射法的計算。除了以上所提方法,我們試著找出一個新的方法,結合全 1.
(11) 域照明中光子映射法之方法及Image-based rendering中多項式貼圖法之技術,使得 場景中光源位置變動時不需重新發散光子即可取得更新後的場景照度,以符合互 動式操作的需求。. 1.2. 研究目標與構想 本論文研究目標即為加速全域照明的計算以達到互動式的操作。為了達到這. 個目標,我們計畫結合光子映射法與多項式貼圖法兩項技術。前者應用於場景照 度的計算;後者取代重新發散光子的計算。為了減少採用光子映射法所產生的大 量光子,資料儲存的方式必須要進行轉換。我們提出預先計算光子密度的方法, 將場景中大量光子分佈轉為單位空間的光子密度,這樣的光子密度圖便十分適合 應用於多項式貼圖法中所提出的多項式計算。如此一來,光源位置變動所造成場 景照度的變化皆可以被許多的方程式求得其結果,而這個結果即可還原成光子密 度圖。 經由上述的轉換計算,場景中最初的許多光子圖(Photon Map)變成了單一的多 項式照度圖(Polynomial Illumination Map)。當應用於在使用者互動的操作環境下, 本研究方法可以在光源變動至新的位置時,快速得到場景照度變化之結果。. 1.3. 論文章節安排 本論文第一章為緒論,敘述研究動機、研究目標與構想。第二章將對本論文. 相關研究作說明及介紹。第三章針對本論文所提出的方法作說明,首先介紹整體 架構,接著分別說明前置處理及動態執行處理的執行步驟及相關技術。第四章敘 述實作過程及結果討論,我們將展現測試場景實作後的畫面及執行數據,並針對 結果進行討論及分析。第五章則對本研究作結論並提出實作後的一些心得。最後 說明本論文之貢獻及其未來工作。. 2.
(12) 第二章、相關研究 2.1. 概述 提高彩現場景真實度的方法,光跡追蹤為一項基本且重要的技術。所謂光跡. 追蹤是指在所建立的 3D 場景中進行 2D 影像合成輸出的一種技術。這樣的路徑追 蹤技巧可見於其後的改良式光跡追蹤、幅射法及光子映射法中,以下便分別描述 與本論文相關的成像方式。. 2.2. 光跡追蹤法 光跡追蹤法最早是由 Turner Whitted 於 1980 年提出[TUR80],這是第一個對於. 產生如相片般品質影像的演算方法。其對於場景中的透明材質或鏡面反射的物體 可以呈現良好的模擬效果。但由於是以單一路徑進行追蹤,對於陰影邊緣的成像 過於銳利,且無法正確呈現具散射(Diffuse)特性的材質,另一個主要的問題是沒有 提供間接照明的計算。對於這些限制,之後有其它研究改進的作法可以解決,如 [JOH84]對於陰影的改善、[GFR88]對於散射特性材質的成像等所提出的方法。. 光跡追蹤採用遞迴式(Recursive)的演算法為[Wat00]:. ShootRay (ray structure) intersection test if ray intersects an object get normal at intersection point calculate local intensity (Ilocal) decrement current depth of trace if depth of trace > 0 calculate and shoot the reflected ray. 3.
(13) calculate and shoot the refracted ray. Calculate and shoot reflected ray elaborates as if object is a reflecting object calculate reflection vector and include in the ray structure Ray Origin := intersection point Attenuate the ray (multiply the current krg by its value at the previous invocation) ShootRay(reflected ray structure) if reflected ray intersects an object combine colours (krg I) with Ilocal. Calculate and shoot refracted ray elaborates as if object is a refracting object if ray is entering object accumulate refractive index increment number of objects that the ray is currently. inside. calculate refraction vector and include in refracted ray structure else de-accumulate refractive index decrement number of objects that the ray is currently inside calculate refraction vector and include in refracted ray structure Ray Origin := intersection point Attenuate ray (ktg ) if refracted ray intersects an object combine colours (ktg I) with Ilocal. where krg is the global reflection coefficient ktg is the global transmitted coefficient. 4.
(14) 2.2.1. 正向光跡追蹤 (Forward Ray Tracing). 正向光跡追蹤係指由光源出發,對場景發散出大量的光線進行路徑追蹤,並 在每一個交點處進行色彩的計算,如圖 1所示。這個觀念如同於一盞房間中的光源 向整個房間內物體發散光子,但僅會有部份的光線最終會射入成像平面被觀察者 所看見,這樣的計算量是十分龐大且沒有效率的,於是便有反向光跡追蹤方式的 提出。. 圖 1 正向光跡追蹤. 2.2.2. 反向光跡追蹤 (Backward Ray Tracing). 由於場景中發散的光線僅有部份會射入成像平面,若是只針對這些看得見的 光線進行路徑追蹤,便可以大幅提昇執行的效率。成像平面上的每一個點,代表 場景中光線最終的路徑,也是可被觀察者看到的光線,所以從成像平面上每一點 出發,向場景中射出一條光線進行逆向的光跡追蹤,根據和場景中物體的交點進 行反射及折射的計算,並在每一個交點處進行色彩的計算,如圖 2所示。. 5.
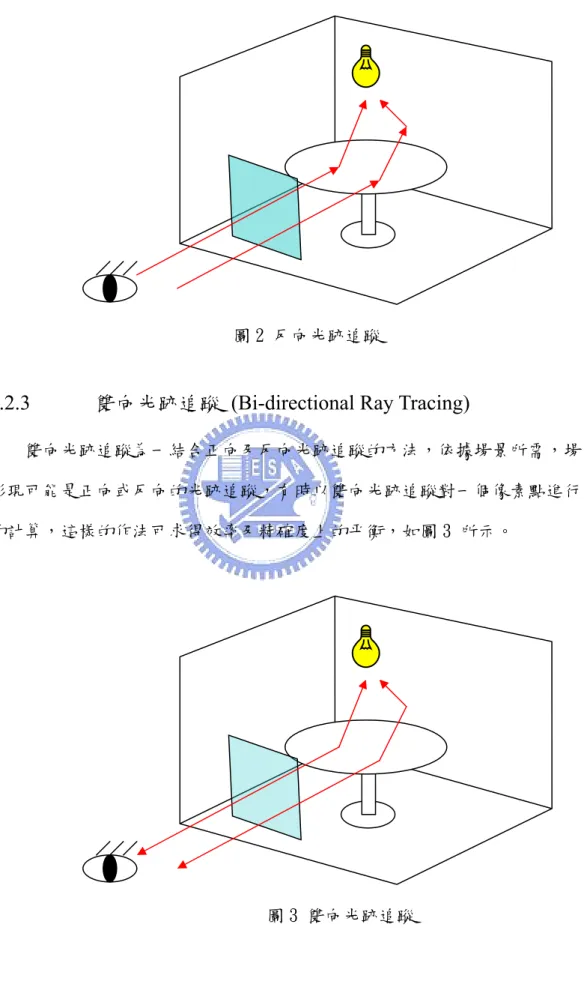
(15) 圖 2 反向光跡追蹤. 2.2.3. 雙向光跡追蹤 (Bi-directional Ray Tracing). 雙向光跡追蹤為一結合正向及反向光跡追蹤的方法,依據場景所需,場景的 彩現可能是正向或反向的光跡追蹤,有時以雙向光跡追蹤對一個像素點進行色彩 的計算,這樣的作法可求得效率及精確度上的平衡,如圖 3 所示。. 圖 3 雙向光跡追蹤. 6.
(16) 2.3. 光子映射法 (Photon Mapping) 光子映射法[JEN96]為計算全域照明的方法之一,可視為一種雙向路徑追蹤的. 方式,其計算分為兩個階段:第一階段為前處理階段,進行光源的光子發散及儲 存;第二階段為彩現成像,使用前一階段所建立的光子圖進行顯像。在第一階段 建立的光子圖包含兩種:全域光子圖(Global Photon Map)及散焦光子圖(Caustics Photon Map)。當光源向場景發散光子時,這些光子的行進路徑追蹤過程可能會被 物體表面吸收、反射或折射。所謂的吸收係指光子其落於表面的位置、方向及能 量被儲存於 Map 中,此即為全域光子圖。而光子經過物體折射會形成散焦現象, 將這些光子儲存於 Map 中,此即為散焦光子圖。第二階之彩現成像段採用反向路 徑追蹤,由觀察者位置及視角向場景進行顯像,過程中將依據第一階段前處理所 建立的光子圖進行照度估算。[JEN01]. 2.3.1. 建立光子圖. 光子映射法的第一步驟為在場景中光源處發散大量光子,每一個光子皆帶有 能量、位置及方向。發散光子的方式依照光源的類型而定,為了簡化光源發散光 子的處理,常見的光源類型簡化表示為四種,顯示於圖4。. 點光源. 球光源. 矩形面光源 圖4 不同的光源類型. 7. 複雜光源.
(17) 光子行進採用路徑追蹤方式,當光子打在場景中的物體表面時,採用俄羅斯 輪盤法(Russian roulette)來決定這個光子為被表面吸收或反射。若光子為吸收,則 將這個光子記錄在全域光子圖中;反之則依物體表面的雙向反射分佈函數 (Bi-directional Reflectance Distribution Function, BRDF)決定其反射方向,並繼續光 子的路徑追蹤,直至光子能量過小而終止。圖5顯示一物體其漫射表面反射光子的 情形。. 漫射表面 反射係數 為 60%. 圖5 漫射表面反射光子情形 除了全域光子圖外,針對散焦的現像使用散焦光子圖來記錄這類的光子進行 顯像。圖6顯示場景中不同物體反射光子的情形,圖7顯示場景進行光子收集後的 情形,包含全域及散焦光子圖。. 8.
(18) 光源. 光子 透明物件. 漫射表面. 圖6 場景中不同的物體反射光子的情形. 圖7 場景進行光子收集. 2.3.2. 場景彩現. 場景成像由觀察者的視角向場景以蒙地卡羅路徑追蹤法(Monte Carlo Path Tracing)[ Kaj86]進行繪製。當觀測射線與場景中物件發生相交時,這個相交點的亮 度除了本身的自發性亮度外,也受其它間接照明的亮度影響,因此彩現成像公式 可表示為式子(1):. 9.
(19) Ls ( x,ψ r ) = Le ( x,ψ r ) + ∫ f r ( x,ψ i ;ψ r ) Li ( x,ψ i ) cos θ i dω i. (1). Ω. 其中, Le 表示自發性亮度, Ω 為入射的半球, x 表示相交點, f r 為這個表面 的BRDF,ψ i 及ψ r 表示入射及反射角, Li 表示進入的亮度。 由於在第一步驟我們已由光源向場景中發散光子,因此場景中表面的亮度資 訊皆已存在光子圖中。利用這樣的結果,進入點 x 的亮度可由光子圖中取得,所以 公式將可改寫為式子(2):. d 2Φ i ( x, Ψi ) Lr ( x, Ψr ) = ∫ f r ( x, Ψr , Ψi ) dωi dAd ω i Ω. (2). 由上述式子可知在以 x 為圓心的球體進行光子的收集並計算光子密度,由於光 子皆落於物體表面上,可視為在平面上收集N個光子,因此,可將球體投影到以 x 為中心的平面圓面積,以圖8表示,所以公式將再改寫為式子(3):. N. Lr ( x, Ψr ) ≈ ∑ f r ( x, Ψr , Ψi , p ) p =1. ΔΦ p ( x, Ψi , p ). πr 2. ΔA = πr 2 圖8 投影至平面光子收集. 10. (3).
(20) 圖9表示以反向光跡追蹤對場景進行彩現,並進行光子資訊收集。. 光子. 圖9 光子映射法的場景彩現. 2.4. 多項式貼圖法 (Polynomial Texture Maps) 在Image-based Rendering領域中,[MGW01]提出一個以影像為基礎的技術。該. 技術不需建立複雜的幾何模型或使用Bump Maps[BLI78]。其所要進行取樣的材質 在不同光照角度的取像後,經過計算轉換成以多項式來代表影像中每一個像素照 度,這樣的作法可以在有限的取樣下進行光照角度的內插計算,得到平順的轉換 影像。. 2.4.1. 影像拍攝. 首先建立一個取像攝影設備,如圖10。為了取得不同角度的光照影像,其裝 置設計成一半球形空心罩,攝影機位於圓罩的頂部中心位置,這個裝置是以靜態 的攝影機進行取像,並將不同光源架設於圓罩周邊的取樣點上。進行拍照時,依 序點亮每一盞燈並進行取像,直到所有取樣點取像完成。. 11.
(21) 攝影機 光源. 物體. 圖10 多項式貼圖法取像設備. 2.4.2. 多項式參數計算. 經過每個光源點照射後的取像,可以得到許多不同照明角度的影像。將這些 影像收集起來,在每張影像相同的座標位置,可視為該物件上此點在不同光照角 度的亮度。我們以(u,v)來表示物件上的這一點,因此可以得到不同的亮度L1(u,v)、 L2(u,v)、L3(u,v)…Ln(u,v),如圖11所示。 (u,v). L1(u,v) L2(u,v) L3(u,v) Ln(u,v). 圖11 像素照度變化的收集 12.
(22) 影像像素亮度和光源的關係式可以使用一個二次方程式來表示,如式子(4)所 示。其中 lu , l v 為將光源投射轉換至貼圖平面的座標,u, v為貼圖座標,a0 - a5為方 程式係數。. L(u , v; lu , lv ) = a0 lu2 + a1lv2 + a2 lu lv + a3lu + a4 lv + a5. (4). 當我們有n個光源照射位置,每個像素就有n個亮度值L(u,v),將式子以矩陣方 式表示,如式子(5)所示。. ⎡ lu 0 2 ⎢ 2 ⎢ lu1 ⎢ M ⎢ 2 ⎢⎣lun−1. 2. lv 0 2 lv1 M 2 lvn−1. lu 0lv 0 lu 0 lv 0 lu1lv1 lu1 lv1 M M M lun−1lvn−1 lu n−1 lvn−1. 1⎤ ⎡a0 ⎤ ⎡ L0 ⎤ ⎥⎢ ⎥ ⎢ ⎥ 1⎥ ⎢ a1 ⎥ ⎢ L1 ⎥ = M⎥ ⎢ M ⎥ ⎢ M ⎥ ⎥⎢ ⎥ ⎢ ⎥ 1⎥⎦ ⎣a5 ⎦ ⎣ Ln−1 ⎦. (5). 將N個方程式以SVD (Singular Value Decomposition) 法求其逼近解以得到係數 a0 - a5的值,再將這些值隨著像素逐一記錄下來。在Polynomial Texture Map當中, 儲存每一個像素的RGB值及方程式係數。. 2.4.3. 影像重建. 多項式貼圖法係在每一個貼圖像素中使用六個多項式係數來重現像素的光影 色彩。換句話說,每一個像素的光影色彩是由光照的方向及六個多項式係數計算 而成的。我們可以將光源位置及式子(5)所求得的係數a0 - a5代入式子(4)中求得該 像素的亮度值L,此像素的色彩可由公式(6)求得。. 13.
(23) R = LR ′ G = LG ′ B = LB ′. (6). 由每一個像素的方程式係數來還原該照明光源位置下的色彩,在未來新的光源 位置改變時便能很快的計算出其貼圖影像。. 14.
(24) 第三章、多項式照度圖 3.1. 整體架構 本論文的研究方法包含了三個步驟:(一)建立光子密度圖、(二)計算多項. 式照度圖、 (三)影像彩現。前兩個步驟為前置處理,第三步驟為提供使用者互動 操作的計算及顯像,系統的執行流程及步驟顯示於圖 12。在圖 12左邊區塊為第一 步驟,執行目的為建立光子密度圖。其中又分為四個程序:(一)取樣光源位置、 (二)發散光子、(三)建立光子圖、(四)建立光子密度圖。這四個程序形成一 個執行的循環,直到完成所有光源位置取樣為止。在圖 12中間區塊則為第二步驟, 執行目的為建立多項式照度圖,使用第一步驟所建立的資料進行計算,並提供下 一步驟更新場景照度時使用。在圖 12右邊區塊的為第三步驟,主要負責場景彩現 顯像,其中又分為三個程序:(一)移動光源、(二)計算場景照度及(三)光跡 追縱場景。. 圖 12 系統流程架構. 15.
(25) 3.2. 前置處理 前置處理主要目的為產生多項式照度圖供光源位置變動後計算場景照度使. 用,整個處理過程主要分為建立光子密度圖及計算多項式照度圖。以下先針對建 立光子密度圖的步驟及方法作說明,最後將說明多項式照度圖的建立及計算方式。. 3.2.1. 移動光源. 在場景中光源位置可移動的空間範圍內,設定位置的取樣。這些取樣點會在 每一循環執行中將光源逐一的移到這些位置上,並依光源的類型進行下一程序的 發散光子處理。. 3.2.2. 發散光子. 發散光子係指在光源的位置依其不同類型向場景發射光子,並進行光子路徑 追蹤及記錄。為了簡化光源發散光子的處理,我們僅進行點光源及矩形面光源的 模擬。 光子發散的計算方式相同於光子映射法,每個光子發散是依光源的放射分佈 函數(radiant distribution function)所決定,在我們所測試的場景中,使用了點光源及 矩形面光源來進行場景的照明。光子的資料結構定義如下:. struct Photon { float power; float pos[3]; unsigned char theta, phi; short plane; };. // photon power // photon position // incoming direction // splitting plane for kd-tree. 在每一個光子資料結構內儲存了其能量(變數power)、位置(變數pos[3])及方向 16.
(26) (變數theta及phi)三個變數,光子透過放射分佈函數向場景射入,行進方式採路徑追 蹤,當光子與場景內之物體表面產生碰撞,我們採用俄羅斯輪盤法的機率方式來 決定其被表面吸收或反射。例如:一個物體表面其具有反射及漫射兩個屬性,以ρd 表示反射係數,ρs表示漫射係數,且ρd+ρs<1。我們設定一個均勻的亂數函數產生0 至1的亂數以z表示。光子與表面碰撞後的處理表示如下:. if ( z < ρd ) do reflect diffuse else if ( z < ρd+ρs ) do reflect specular else do absorb. 3.2.3. 建立光子圖. 若光子決定被表面吸收,則將這個光子資料存於全域光子圖中。全域光子圖 可視為一個陣列的儲存空間,為了加速臨近光子的搜尋,全域光子圖使用KD-Tree 結構來進行資料的儲存。反之,若光子決定被表面反射,則依物體表面的反射函 數決定其反射方向,並繼續光子的路徑追蹤,直至光子能量過小而終止。當所有 的光子都發散完畢即完成全域光子圖的建立。. 17.
(27) 圖13顯示建立光子圖的流程。建立光子圖執行程序前,我們先將光源移動的 位置空間分割為M個取樣點,光源發散P個光子。待本程序執行完成後,可得到場 景的光子圖M張。. 圖13 建立光子圖流程 18.
(28) 3.2.4. 建立光子密度圖. 我們首先從光源取樣位置計算光子圖,其次將每一張光子圖轉換至光子密度 圖,此光子密度圖相對於場景中不同光源位置的照度。 欲將光子圖轉換至光子密度圖,首先需將場景等間距的進行空間分割成為許 多小的取樣空間,描述於圖14。然後使用每個小取樣空間的中心點,以固定的半 徑進行光子數目的收集,在此空間中可計算出光子密度值並且儲存至一個光子密 度圖中:. 圖14 取樣空間內進行光子密度的計算. 圖15 顯示寺廟場景經過空間分割後的情形,空間分割的範圍包含整個場景物 件,其中紅色點為每個取樣空間的中心點。. 19.
(29) 圖15 場景空間等量分割. 圖16 顯示寺廟場景中一個光子圖經過轉換後成為光子密度圖的結果,其中取 樣空間內之顏色愈接近黑色即表示愈低的光子密度;愈接近白色則為愈高的光子 密度。光子密度的計算皆會落於物體的表面上。. 圖16 場景計算完成光子密度圖. 20.
(30) 圖17顯示經過發散光子程序後,以光子圖進行場景彩現之結果;圖18顯示將 光子圖轉換為光子密度圖後,以光子密度圖進行場景彩現之結果。比較兩個結果, 可觀察到後者顯示的影像較為平滑。. 圖 17 光子圖彩現的結果. 圖 18 光子密度圖彩現的結果. 每一個光源其照明資訊的收集,均需要經過上述四個程序來完成。假設所有 光源的移動位置取樣為n,在完成所有取樣點的計算後,會得到n組光子密度圖, 表示於圖19。. 21.
(31) Photon Map. Photon Density Map. Pos 1. …. …. … Pos n-1 Pos n. 圖19 收集所有光源取樣位置的光子密度圖. 22.
(32) 圖20顯示建立光子密度圖的流程。建立光子密度圖執行程序前,我們已將場 景空間分割為N個取樣空間,並將光源移動的位置空間分割為M個取樣點。待本程 序執行完成後,可得到場景的光子密度圖M張。. 圖20 建立光子密度圖流程. 23.
(33) 3.2.5. 建立多項式照度圖. 多項式照度圖是用來建立光源位置及場景中照度的關係。在建立此關係之 後,即可透過方程式的係數還原新光源位置的場景照度,藉由此方法可免除在光 子映射法中若光源位置改變時就需重新發散光子、追蹤光子等繁複的計算過程。 而且此方程式僅是簡單的乘法及加法計算,對於全域照明的計算非常有效率。 每一取樣點,使用一個三次方程式來表示光子密度和光源位置的關係。計算 式描述於式子(7)。 方程式中D = (Dx,Dy,Dz)表示在取樣空間位置(x, y, z)的光子密 度;L = (l1, l2, l3)表示光源的位置。a0-a19表示三次方程式的係數,透過這二十個係 數,可計算出取樣空間在光源位置L時的光子密度D。. D = a 0 l12 l 2 + a1l 22 l 3 + a 2 l 32 l1 + a3l1l 22 + a 4 l 2 l32 + a 5 l3 l12 + a 6 l1l 2 l3 + a 7 l13 + a8 l 23 + a9 l33 + a10 l12 + a11l 22 + a12 l 32 + a13 l1l 2 + a14 l 2 l 3 + a15 l3 l1 + a16 l1 + a17 l 2 + a18 l 3 + a19 (7). 使用相同於[MGW01]的方法,在矩陣式子(8)中的係數 X = [a0 L a19 ] 將可 t. 用來計算每一個取樣空間的光子密度資料並儲存於光子密度圖中。A1表示十個光 源位置之三次項不同的組合,A2表示六個光源位置之二次項不同的組合,A3表示三 個光源位置之線性項,1表示為皆為1的列。. [A1 A2 A3 1]X = D 其中. 24. (8).
(34) ⎡l 012 l 02 ⎢ 2 l l A1 = ⎢ 11 12 ⎢ M ⎢ 2 ⎣⎢l k1l k 2. l 022 l 03 l122 l13 M 2 lk 2lk 3. l 032 l 01 l132 l11 M 2 l k 3l k1. l 01l 022 l11l122 M l k 1l k22. l 02 l 032 l12 l132 M l k 2 l k23. ⎡l012 l022 ⎢ 2 l11 l122 ⎢ A2 = ⎢M M ⎢2 2 ⎢⎣lk1 lk 2. l032 l132 M lk23. l01l02 l11l12 M lk1lk 2. l02l03 l12l13 M lk 2lk 3. l03l01 ⎤ ⎥ l13l11 ⎥ M ⎥ ⎥ lk 3lk1 ⎥⎦. ⎡l01 l02 ⎢l l A2 = ⎢ 11 12 ⎢M M ⎢ ⎣lk1 lk 2. l03 ⎤ l13 ⎥⎥ M⎥ ⎥ lk 3 ⎦. 且 k 表示光源位置的取樣數目, X = [a0 L a19 ]. t. D = [D0 L Dk ]. t. 25. l 03l 012 l 01l 02 l 03 l13l112 l11l12 l13 M M 2 l k 3 l k 1 l k 1l k 2 l k 3. 3 l 01 l113 M l k31. 3 l 02 l123 M l k32. 3 ⎤ l 03 ⎥ l133 ⎥ M⎥ ⎥ l k33 ⎦⎥.
(35) 圖21顯示建立多項式照度圖的流程。建立多項式照度圖執行程序前,我們已 將場景空間分割為N個取樣空間,並將光源移動的位置空間分割為M個取樣點。待 本程序執行完成後,可得到場景的多項式照度圖1張。. 圖21 建立多項式照度圖流程 26.
(36) 3.3. 動態執行處理. 3.3.1. 重建光子密度圖. 在光源移動位置範圍內,亦即不超出先前在光源位置取樣範圍,將新的位置 代入多項式照度圖內每一組係數,求其相對應的光子密度值,即可得到新的光子 密度圖,如圖 22所示。. New position. PIM. Photon Density Map. 方程式 20 個係數. 光子密度. 圖 22 還原計算光子密度圖. 3.3.2. 場景繪製. 場景繪製係指以光子密度圖進行反向光跡追蹤的方式,將其所成的照度值進 行場景明暗混色。根據觀察者的位置角度,我們以視角射線向場景進行路徑追蹤 及彩現顯像。對每一條Ray計算其與表面相交點,以此相交點在光子密度圖中找出 臨近的光子密度值,以距離為加權計算其對這個相交點的貢獻,該影響程度隨著 距離而遞減,因此距離相交點近的供獻度較高,如圖 23所示。. 27.
(37) 臨近的光 子密度. Distance Distance Center. +. +. Hit Point. Distance. + +. Center. Ray. Distance. Center. Center. 圖23 計算交點的光子密度 場景的明暗彩現係依光子密度值來顯示。光子密度值愈高,代表在這個空間 內光源的光子愈多,因此呈現出較亮的顏色,故以白色代表最亮,黑色代表最暗。 當Ray與物體表面的交點計算出其光子密度後,再與物體表面顏色進行混色即 可得到這個點的色彩。為了加速運算,在視角不變動的情形下,我們可以記下這 個交點供下次彩現時使用。. 28.
(38) 圖24顯示場景彩現的流程。在執行場景彩現程序前,其投影在螢幕上的顯示平 面寬度為W,高度為H。光源位置在L(x,y,z)。. 圖24 場景彩現流程. 29.
(39) 3.4. 多照明光源應用 場景中多光源照明是常見的。我們可以很簡單的使用相同的技術,將場景中. 單一光源延伸至多光源的應用。其方法為在前處理的程序中,將每一個光源的計 算結果以獨立的係數存於多項式照度圖中,例如:若有三個光源應用於場景中, 則每一個cell即存在著三組係數。在進行場景彩現時,分別依每個光源取其所屬的 係數計算後的結果進行疊合,如圖 25所示。. Light Sources. PIM. Photon Density Map. Light 1. …. …. …. PIM Light n-1 Light n. 方程式 20 個係數. 圖25 多照明光源的計算. 30. 光子密度.
(40) 第四章、實作過程與結果討論 4.1. 實驗說明 本論文實驗為實作場景光源位置變動的照度計算,並展現執行時間及彩現畫. 面,並在實驗過程中針對結果作說明及討論。本章節的安排先就多項式全域照明 方法進行實作,第一個實驗設定為單一光源,其中說明執行及開發環境、場景設 定資訊及程式實驗執行流程,並列出實驗執行的各項測試時間。第二個實驗設定 為多照明光源,在相同的執行環境下增加場景光源進行測試,並列出實驗執行的 測試時間。其後我們呈現三次方多項方程式進行照度近似計算的結果。最後,我 們將場景彩現的畫面列出並針對光源移動的照度變化進行說明。. 4.2. 多項式全域照明計算結果. 4.2.1. 實驗一:單一照明光源場景測試. 我們將前述所提的構想及演算法進行實作,表 1 為程式開發環境,所有實驗 計算過程及結果的彩現成像完全透過軟體方式進行計算,並沒有使用硬體加速圖 形計算,而表中所列 3D API僅用來呈現場景安排、光源位置變動及視角更改等使 用者互動操作部份。表 2 為程式執行實驗環境。. 程式工具. Microsoft Visual C++ 6.0. 3D API. Microsoft DirectX 9.0 SDK. 作業系統. Microsoft Windows XP SP2 表 1 程式開發環境. 31.
(41) 中央處理器. AMD Athlon 1.3GHz. 記憶體容量. 768MB RAM. 作業系統. Microsoft Windows XP SP2 表 2 實驗測試環境. 我們收集了兩個場景進行實驗:寺廟(Temple)及修道院(Cloister) ,場景模型由 [WWW]處下載取得,表 3 為場景的幾何資訊。實驗執行時,我們採用視角固定的 方式,並且只針對場景中之可視點進行彩現成像。. 項目 Object 數目. Vertex 數目. Polygon 數目. Temple. 97. 9674. 19230. Cloister. 81. 40939. 81410. 實驗場景. 表 3 實驗測試場景. 對於每一個測試場景,實驗執行的流程如圖 26所示。主要分為兩部分,第一 部分為前處理,首先進行光子發散及收集並進行光子密度圖轉換,直至取樣完成 所有光源位置,並計算出多項式照度圖。第二部分為互動操作及彩現顯像計算, 由新的光源位置透過多項式照度圖還原光子密度圖,接著進行場景彩現計算。. 32.
(42) 圖 26 程式實驗執行流程. 33.
(43) 實驗進行前,我們需先設定測試參數值,表 4之數值分別表示測試場景在每個光源 取樣點所發散光子數量,同時也顯示場景空間分割後的空間取樣點數目。. 項目 光源發散光子數. 場景空間取樣點. 光源取樣位置. Temple. 40000. 44100. 182. Cloister. 30000. 61712. 96. 實驗場景. 表 4 測試場景進行光源取樣及空間分割的數據. 表 5中,(A)項目之數值表示測試場景由每個光源取樣位置進行光子發散、追 蹤及收集,並轉換至光子密度圖花費的時間;(B)項目之數值表示將這些光子密度 圖轉為多項式照度圖其計算多項式係數所花費的時間。將這兩個計算時間加總即 為前處理所花費的總時間,如表格中(A)+(B)項目。表格中最後一項數值為場景使 用多項式照度圖進行彩現顯像時每秒繪圖的畫面格數。. 項目. 彩現顯像 (A) 光源發散光子. (B) 計算多. (A) + (B) 前處理 (Frames /. 至建立光子密度圖. 項式照度圖. 時間 Sec). 實驗場景 Temple. 2760 秒. 47 秒. 2807 秒. 2.2916. Cloister. 3120 秒. 56 秒. 3176 秒. 1.375. 表 5 測試場景進行前處理計算及彩現階段所花費的時間. 表 5中,我們在相同場景採用不同的彩現方式進行光源位置變動時計算速度比 較。可以從表中數值觀察到採用本論文的多項式照度計算節省大量的計算時間。. 34.
(44) Polynomial. 項目 Ray Tracing. Photon Mapping Illumination Map. 實驗場景 Temple. 12 秒. 10.6 秒. <1 秒. Cloister. 21.3 秒. 20.3 秒. <1 秒. 表 6 不同的彩現方式計算時間比較. 4.2.2. 實驗二:多照明光源場景測試. 為了在多照明光源場景中應用我們的方法並加以測試其執行時間,我們以寺 廟場景來實驗,將光源數目由一個逐步增加至四個,並且分別測試其場景彩現的 速度。表 7為在寺廟場景進行實驗,數值顯示當光源數目增加時,其繪圖速度與僅 有一盞光源的比較,由表中顯示當光源數由一盞增為二盞時,其繪圖速度下降了 22.586%,若再增加為三盞其繪圖速度則下降了 33.317%,當場景中光源數為四盞 時,其繪圖速度下降了 41.450%。由表列數值可以得知,光源的增加僅為多項式計 算次數的增加,所增加的繪圖時間可視為一固定的數值。這是由於在相同場景下, 每盞光源所要處理的多項式照度圖計算量幾乎相同。. 項目 彩現顯像(Frames / Sec). 相對繪圖速度. 1. 2.041. -. 2. 1.580. -22.586%. 3. 1.361. -33.317%. 4. 1.195. -41.450%. 光源數目. 表 7 數值顯示場景光源增加所造成的繪圖速度減慢程度 35.
(45) 4.2.3. 三次方多項方程式近似結果. 當場景中光源移動的範圍較大時,其每一個取樣 Cell 其光子密度的變化也變 得複雜,使用三次方程式逼近較二次方程式有著更佳的結果,因此我們使用二十 個係數儲存於每個 Cell 中,並使用多項式及光源位置來還原其所對應的光子密度。 如圖 27 所示,顯示場景中的一個取樣Cell的照度變化,橫向表示所有取樣光 源的位置,縱向表示光子密度。紅色表示原始光子密度值,藍色表示使用三次方 程式逼近的結果,綠色表示與原始值的誤差值。. 圖 27 場景中不同的取樣 cell 的多項式結果圖. 36.
(46) 4.3. 測試場景彩現結果 第一個測試的場景為寺廟,畫面解析度設為 393 x 393 像素,執行畫面更新速. 度約為每秒 2.2 個畫面,實驗執行的畫面顯示於圖 28、圖 29及圖 30中。 圖 28為取自於上前方觀察角度的連續畫面中的三張影像,左邊的圖片顯示光 源位置移至場景的右下角,中間的圖片顯示光源位置移至場景中間上方的位置, 右邊的圖片顯示光源位置移至場景的左上角。圖 29為採用側角度來觀察場景照度 變化的情形,光源移動的方向同前描述。圖 30為採用斜角度來觀察場景照度變化 的情形,光源移動的方向由場景中右上角移至左下角。. 37.
(47) 圖28 寺廟場景上前方的觀察角度的照度變化情形. 圖29 寺廟場景側方向觀察角度的照度變化情形. 圖30 寺廟場景斜方向觀察角度的照度變化情形. 38.
(48) 第二個測試的場景為修道院,畫面解析度為 393 x 393 像素,執行畫面更新速 度約為每秒 1.3 個畫面,實驗執行的畫面顯示於圖 31、圖 32及圖 33中。 圖 31為取自於前方觀察角度的連續畫面中的三張影像,左邊的圖片顯示光源 位置移至場景的右下角,中間的圖片顯示光源位置移至場景右上角,右邊的圖片 顯示光源位置移至場景的左邊。圖 32為採用斜角度來觀察場景照度變化的情形, 光源移動的方向同前描述。圖 33為採用場景右方角度來觀察場景照度變化的情 形,光源移動的方向由觀察角度的左邊移向右邊。. 39.
(49) 圖31 修道院場景前方的觀察角度的照度變化情形. 圖32 修道院場景斜方向觀察角度的照度變化情形. 圖33 修道院場景右方向觀察角度的照度變化情形. 40.
(50) 第五章、結論 5.1. 研究總結 在本論文中,我們使用了以光子映射法為基礎的全域照明方法及多項式貼圖. 法,對場景進行光源照度的計算,並提出了光子密度圖,將場景照度結果轉為以 空間光子密度的表示方法,這使得數量龐大的光子資料得以減少,以利於多項式 的計算。之後將光源移動的位置及其對應的光子密度圖之變化關係,經由三次方 多項式計算以求得空間中每一取樣點之二十個多項式係數,並將其儲存於多項式 照度圖中,用來還原對應於光源位置的光子密度圖。有了這些準備,便可在給定 新的光源位置後,很快的計算出整個場景的照明亮度。由實驗中得知,經過上述 的程序處理,可加速取得全域照明計算之結果,省略光源發散光子計算的步驟, 縮減大量計算時間。 此外,經由我們觀察測試場景的結果,在場景中以較細的空間分割而形成的 取樣cell,可得到較精確的空間照明數值,但過多的取樣cell卻會導致較長的計算時 間。另外,隨著光源的取樣點增加,空間中每一取樣cell之光子密度變化也隨之複 雜,由於是使用多項方程式來進行結果逼近,因此從圖 27中可以看到如此將會損 失一些細微的數值變化,這樣的結果會造成彩現時陰影部份的細節消失,而呈現 出較為模糊的影子。在加速計算方面,於建立多項式照度圖時,我們可以將未與 物體表面接觸的取樣cell忽略,這些取樣cell通常像是空間中的間隙,如此便可加速 多項式照度圖的計算及處理。. 41.
(51) 5.2. 未來工作 我們提出一個新的方法採用多項式近似的方式來進行全域照明計算,延著這. 個方向,將有許多課題可以被提出研究。其中一個為加入可變動的視角,這需要 加快處理本篇論文所提的方法。此外,由於多項式計算方式單純,亦可將整體執 行架構於硬體上,應用GPU硬體加速計算,相信對速度上的提昇會有很大的助益。 另一方面,相對於場景中光源位置變動,物體位置改變更常見於實際的應用,因 此,加入對物體變動的全域照明計算亦為一重要的方向。. 42.
(52) 參考文獻 [Bli78]. BLINN J. F.: Computer display of curved surfaces. PhD thesis, 1978.. [DHT*00] DEBEVEC P., HAWKINS T., TCHOU C., DUIKER H.-P., SAROKIN W., SAGAR M.: Acquiring the reflectance field of a human face. In SIGGRAPH ’00: Proceedings of the 27th annual conference on Computer graphics and interactive techniques (New York, NY, USA, 2000), ACM Press/Addison-Wesley Publishing Co., pp. 145–156. [DMG99] DISCHLER J.-M., MOSTEFAOUI L., GHAZANFARPOUR D.: Radiosity including complex surfaces and geometric textures using solid irradiance and virtual surfaces. Computers & Graphics 23, 4 (1999), 507–524. [EHY95] EPSTEIN R., HALLINAN P. W., YUILLE A. L.: 5 +/- 2 eigenimages suffice: An empircal investigation of low-dimensional lighting models, 1995. IEEE Workshop on Physics-Based Vision. [HSA91] HANRAHAN P., SALZMAN D., AUPPERLE L.: A rapid hierarchical radiosity algorithm. In SIGGRAPH ’91: Proceedings of the 18th annual conference on Computer graphics and interactive techniques (New York, NY, USA, 1991), ACM Press, pp. 197–206. [Jen95] JENSEN H. W.: Importance driven path tracing using the photon map. In Rendering Techniques ’95 (1995), pp. 326–335. (Proceedings of the Sixth Eurographics Workshop on Rendering). [Jen96]. JENSEN H. W.: Global illumination using photon maps. In Proceedings of the eurographics workshop on Rendering techniques ’96 (London, UK, 1996), Springer-Verlag, pp. 21–30.. [Jen97]. JENSEN H. W.: Rendering caustics on non-lambertian surfaces. Comput. Graph. Forum 16, 1 (1997), 57–64.. [Jen01] JENSEN H. W.: Realistic image synthesis using Photon Mapping. A. K. Peters, Ltd., Natick, MA, USA, 2001. 43.
(53) [LTG93] LISCHINSKI D., TAMPIERI F., GREENBERG D. P.: Combining hierarchical radiosity and discontinuity meshing. In SIGGRAPH ’93: Proceedings of the 20th annual conference on Computer graphics and interactive techniques (New York, NY, USA, 1993), ACM Press, pp. 199–208. [Kaj86] KAJIYA J. T.: The rendering equation. In Computer Graphics (SIGGRAPH ’86 Proceedings) (Aug. 1986), vol. 20, pp. 143–150. [LW93] LAFORTUNE E. P., WILLEMS Y. D.: Bidirectional path tracing. In 3rd International Conference on Computational Graphics and Visualization Techniques (Compugraphics) ’93 (Alvor, Portugal, 1993), Santo H. P., (Ed.), pp. 145–153. [LW96] LAFORTUNE E. P., WILLEMS Y. D.: Rendering participating media with bidirectional path tracing. In Rendering Techniques ’96 (Proceedings of the Seventh Eurographics Workshop on Rendering) (New York, NY, 1996), Springer-Verlag/Wien, pp. 91–100. [MGW01] MALZBENDER T., GELB D., WOLTERS H.: Polynomial texture maps. In SIGGRAPH ’01: Proceedings of the 28th annual conference on Computer graphics and interactive techniques (New York, NY, USA, 2001), ACM Press, pp. 519–528. [PDC*03] PURCELL T. J., DONNER C., CAMMARANO M., JENSEN H. W., HANRAHAN P.: Photon Mapping on programmable graphics hardware. In HWWS ’03: Proceedings of the ACM SIGGRAPH/EUROGRAPHICS conference on Graphics hardware (Aire-la-Ville, Switzerland, Switzerland, 2003), Eurographics Association, pp. 41–50. [TSH97] TEO P. C., SIMONCELLI E. P., HEEGER D. J.: Efficient Linear Rerendering for Interactive Lighting Design. Tech. rep., 1997. Stanford Computer Science Department Technical Report STAN-CS-TN-97-60. [VG94] VEACH E., GUIBAS L.: Bidirectional estimators for light transport. In Proceedings of the 5th Eurographics Workshop on Rendering ’94 (Darmstadt, Germany, jun 1994), pp. 147–162. [WBS03] WALD I., BENTHIN C., SLUSALLEK P.: Interactive global illumination 44.
(54) in complex and highly occluded environments. In EGRW ’03: Proceedings of the 14th Eurographics workshop on Rendering (Aire-la-Ville, Switzerland, Switzerland, 2003), Eurographics Association, pp. 74–81. [WKB*02] WALD I., KOLLIG T., BENTHIN C., KELLER A., SLUSALLEK P.: Interactive global illumination using fast ray tracing. In EGRW ’02: Proceedings of the 13th Eurographics workshop on Rendering (Aire-la-Ville, Switzerland, Switzerland, 2002), Eurographics Association, pp. 15–24. [Wat00] WATT A.: 3D Computer Graphics. Addison-Wesley, 2000, pp. 349. [WS03] WAND M., STRASSER W.: Real-time caustics. Comput. Graph. Forum 22, 3 (2003), 611–620. [WWW] architecture models. http://www.3dcafe.com.. 45.
(55)
數據

Outline
相關文件
Theorem 3.1, together with some algebraic manipulations, implies that the quantum corrections attached to the extremal ray exactly remedy the defect caused by the classical product
• X-ray variability correlates with mass transfer rate: H/He disk stability model predicts various states. • X-ray bursts (active and
The existence of cosmic-ray particles having such a great energy is of importance to astrophys- ics because such particles (believed to be atomic nuclei) have very great
• Follow Example 21.5 to calculate the magnitude of the electric field of a single point charge.. Electric-field vector of a
coordinates consisting of the tilt and rotation angles with respect to a given crystallographic orientation A pole figure is measured at a fixed scattering angle (constant d
If we place the initial point of a vector at the origin of a rectangular coor- dinate system, then the terminal point of has coordinates of the form or , depending on whether
Because simultaneous localization, mapping and moving object tracking is a more general process based on the integration of SLAM and moving object tracking, it inherits the
Salmon, Automatic Creation of Object Hierarchies for Ray Tracing IEEE CG&A 1987 Object Hierarchies for Ray Tracing, IEEE CG&A, 1987. • Brian Smits, Efficiency Issues
