A Low Complexity Algorithm for Detecting Rotational Symmetry
Based
on
the Hough
Transform Technique
Soo-Chang Pei and Ji-Hwei Horng
Department
of
Electrical Engineering
National Taiwan University
Taipei, Taiwan,
R.O.C.
Email: [email protected]
Abstract
T h e Hough transform technique has been applied t o
detect rotational symmetry by Raymond K.K. Yip[l].
H e proposed an 0 ( N 3 ) algorithm, where N is the number of edge points in the input image, t o extract global o r local features of rotational symmetry in the presence of noise and occlusion. In this paper, we fol-
low the Yap’s concept and design a simple and eficzent
algorithm, which can detect the rotational symmetry in 0 ( N 2 ) time. S o m e simulation results of the new proposed algorithm are also given.
I.
Introduction
Ratational symmetry is an important property of a shape. If certain parts of a rotationally symmetric shape(abbreviated as RSS henceforth) are missing, the shape can be recovered by using the property of sym- metry without the need of models. Another benefit of rotational symmetry is that any processing of the
RSS
can be done by computing one of the repeating portions. Besides, the storage of a RSS requires to store only one repeating portion.Many methods have been proposed t o detect the number of folds and the orientation of a RSS. Tsai pro-
posed the generalized principal axes of a RSS[2]. The
principal axis of a shape is defined as the line with re- spect to which the moment of inertia is minimized[3]. For a RSS, no principal axis can be determined. Its moment of inertia is a constant with respect to any line going through its centroid. The generalized prin- cipal axes of a n-fold RSS are defined, by Tsai, as
the lines with respect to which the nth-order central moment of inertia is minimized. Pei proposed an algo- rithm t o detect the number of folds and to normalize the RSS[4]. The Fourier descriptor of a n-fold RSS
has nonzero values only at multiples of n. The first nonzero Fourier coefficient is detected and the shape is rotated properly so that the phase of this coefficient becomes zero. Lin proposed a simple mathematical property[5],[6]. Which is used t o detect the number of folds and to define the universal principal axes of a RSS.
The application of Hough technique to the detec- tion of RSS is first proposed by Yip[l]. His algorithm can handle shapes formed by separate points contain- ing missing data due to noise or occlusion. This prop- erty of the Hough technique is attractive, since the other methods usually can only handle shapes with simple closed contours. However, the Hough technique has the disadvantage of high computational complex- ity. Yip reduced the dimensionality of the parameter space by breaking it down into three passes. In this paper, we propose an algorithm which is more effi- cient than the Yip’s and enables the Hough technique to detect RSS within reasonable time.
11.
Proposed
algorithm
An n-fold RSS has the property that if it is rotated around its centroid by any multiple angle of 21r/n, the rotated version is identical to the original shape. That is, there are lots of similar isosceles triangles, each of them is formed by a pair of edge points with the cen- ter of rotation and has an angle 21rln at the center of
rotation. For such triangles, the median that bisects the side joining edge points is a perpendicular bisector and the ratio of the side to the median is 2 tan ( r / n ) .
Figure l(a) shows an &fold RSS. Some of the similar isosceles triangles are shown in Figure l ( b ) .
The Hough technique[7],[8] can be applied to de- tect RSS based on the above properties. If the num- ber of folds is given, two possible centers of rotation are hypothesizled and voted in the parameter space for each pair of edge points. Then, the peak posi- tion in the parameter space is detected as the cen- ter of rotation. Given edge points of the input image
S = { ( ~ I , Y I ) , ( ~ 2 , ~ 2 ) ,
.-
,
(~N,YN)), the proposed al- gorithm is summarized as follows:For k = 3 to n,,,,, H = O ; tmp = 2 ta.n ( r / k ) ; For i=l t o N , For j=1 to N , [ & , A d y ] = [zz + X j , Y i + Y j
I
/
2 ;[
VmV,I
=[ Y i -
Y3,23 - xz3
/ t w
; H ( M ,+
VZ,MY+
V,)+
+
; H ( M ,-
v,,
My - V,)+
+
; End EndSave the position of the Hough transform peak ;
End
where H is the accumulator array of the Hough trans- form and nmaz is the maximum number of folds of the
RSS expected t,o be detected.
Since only local feature of
RSS
is used, the algo- rithm can be applied to detect partial shapes.If
there are multiple RSS, there will be multiple local peaks in the parameter space. The algorithm can also re- solve concentric RSSs with different numbers of folds, because RSSs with different numbers of folds are de- tected at different iterations(k-th iteration for detect- ing k-fold RSS in the algorithm). That is, the Hough technique can be applied to detect mutually occluded shapes in a noisy scene.Notice that,, an n-fold
RSS
is also a k-fold RSSprovided that ialk E integer. Therefore, if the num- ber of folds n is not a prime number, multiple peaks with a common center of rotation will present at dif- ferent iterations. The number of folds which divided by the others is, defined as the number of folds of such an RSS.
The presence of Hough transform peak only en- sures that there are lots of point pairs fit the local feature. However, it says nothing about the global
structure of the detected
RSS.
The global structure ofthe detected RSS can be verified by the procedure pro- posed in the third pass of the Yip’s algorithm. Given the edge image and the set of edge points S , the verifi- cation of the detected center of rotation 0 and number of folds n is summarized as follows:
For i=l t o N ,
Find the set of edge points
G
= { ( z f , y f )I
I = 1 , 2,...,
m.}among the pixels
where (z;, y i ) is obtained by
rotating (zi, yi) with an angle of 27r/k centered at 0. RSS = RSS U G. {(z;,yt).
I
‘c
= 0,1,2,...,
n-
l.}, If m / n>
E , End Endwhere E is a threshold which defines the least percent- age of total folds, of the detected
RSS,
expected to be seen in the resultant image. The point setRSS
ex- tracted from the input image is the detectedRSS
cor- responding to the center of rotation 0 and the number of folds n.111. Experimental results
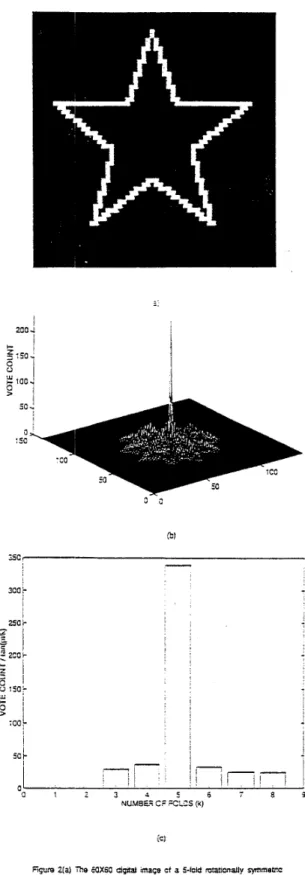
Our algorithm is programmed in MATLAB lan- guage and run on the Sun SPARC 10 workstation. Figure 2(a) is the 60 x 60 digital image of a 5-fold RSS.
The Hough transform data of the iteration
k
= 5 is plotted in Figure 2(b), where a peak is presented at the center of the star. The vote counts at the same po- sition corresponding to different iterations are plotted in Figure 2(c). Noticing that, the vote counts plotted in Figure 2(c) are normalized by the factor tan ( n / k ) .In our algorithm, two accumulators are incre- mented by each pair of edge points. If the distance be- tween the pair of edge points deviates tan ( n / k ) pixels, the same accumulators will be incremented due to the quantization effect of the discrete accumulator array. That is, the number of edge point pairs which incre- ment the same accumulator is approximately propor- tional to the factor tan ( . i r / k ) . The vote counts plotted in Figure 2(c) are normalized by this factor.
Figure 3(a) is the 60 x 60 digital image of a 6-fold
RSS. The Hough transform data of the iteration k = 6 is plotted in Figure 3(b). Figure 3(c) shows the vote counts of different iterations at the peak position of Figure 3(b). There is a peak at the iteration
k
=
3,since the number of folds 6 is divided by 3 .
To demonstrate the applicability of the Hough technique to the occluded shapes in noisy scene, our algorithm is applied to the 70 x 70 digital image of
occluded RSSs shown in Figure 4(a). Figure 4(b) and 4(c) show the Hough transform data of the iterations
IC
= 3 and 5 respectively. The vote counts of differ- ent iterations at the peak positions of Figure 4(b) and 4(c) are plotted in Figure 4(d) and 4(e) respectively.IV.
Complexity
The Yip’s algorithm has computing time 0 ( N 3 ) ,
since the most time consuming pass(the third pass) of the algorithm has computing time 0 ( N 3 ) . Our algo- rithm has computing time O(N’). Although the basic operations of the two are not exactly the same, our al- gorithm is much faster than the Yip’s. Of course, the same amount of memory are used in the both algo- rithm.
For example, in applying to the image shown in Figure 2(a), the first pass of the Yip‘s algorithm re- quires 5069 CPU time in seconds: however, our algo- rithm requires only 226 CPU time in seconds. If they are applied t o a larger image with more edge points, the CPU time consumed by the Yip’s algorithm will grow faster than that consumed by our algorithm.
V.
Conclusion
In this paper. we propose an C1(N2) algorithm
to detect rotationally symmetric shapes. The Hough technique is applied t o detect the center of rotation and the number of folds of the
RSS
by using local features. Then, the RSS is extracted from the in- put image based on the detected parameters. Since only local features are used, the algorithm can han- dle occluded shapes under nois>- environment. Ex- perimental results demonstrate the usefulness of our algorithm.References
Raymond K.K. Yip, Wilson C.Y-. Lam, Peter K.S.
Tam, and Dennis N.K. Leung. ;1 Hough transform technique for the detection of rotational symmetry,
Pattern Recognition Letters 15. pp. 919-928, 1994.
Wen-Hsiang Tsai and Sheng-Lin Chou, Detection of generalized principal axes in rotationally sym-
metric shapes, Pattern Recognatzon, Vol. 24, No. 2, pp. 95-104, 1991.
[3] A. Rosenfield and
A.
C.
Kak, Digital Picture Pro- cessing, Vol. 11, Academic Press, New York, 1982. [4] Soo-Chang Pei and Chao-San Lin, Normalizationof rotationally symmetric shapes for pattern recog- nition, Pattern Recognztion, Vol. 25, No. 9, pp. [5] Ja-Chen Lin, Universal principal axes: an easy-to- construct tool useful in defining shape orientations for almost every kind of shape, Pattern Recogna- tion, Vol. 26, No. 4, pp. 485-493, 1993.
913-920, 1992.
[6] Ja-Chen Lin, Wen-Hsiang Tsai, and Jun--Ann Chen, Detecting number of folds by a simple math- ematical property, Pattern Recognztaon Letters 15,
pp. 1081-1088,1994.
[7] Jack Sklansky, On the Hough technique for curve detection, IEEE Trans. Comput., Vol. c-27. No. 10, pp. 923-926, October 1978.
[8] Christopher M. Brown, Inherent bias and noise in the Hough transform, IEEE Trans. Pattern Anal. Machzne Intell., Vol. PAMI-5. No. 5, September
1983.
Figure 1 (a) An 8-fold rotationally symmetric shape.
I
i
200 J zoo
i
Figure 3(a) The BOXEO cigtal image c: a %old rclabmlly mmeLTc
200