!
!γ
!κ
!
!˃
!ደ!
ཥਉࠋደჄˎുࠂՀؚ
ႈ
!
ˁ
!
ባ
!
̜
!
評估移動無線隨意網路上的可調式拓樸控制機制
An Evaluation of the Adaptive Topology Control Scheme in
Mobile Ad Hoc Networks
研 究 生:張苑瑩
指導教授:簡榮宏 教授
評估移動無線隨意網路上的可調式拓樸控制機制
An Evaluation of the Adaptive Topology Control Scheme
in Mobile Ad Hoc Networks
研 究 生:張苑瑩 Student:Yuan-Yin Chang
指導教授:簡榮宏 Advisor:Rong-Hong Jan
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science June 2006
Hsinchu, Taiwan, Republic of China
評估移動無線隨意網路上的
可調式拓樸控制機制
研究生:張苑瑩
指導教授:簡榮宏 博士
γκ˃ደཥਉࠋደჄˎുࠂՀؚ
摘
要
在無線隨意網路的拓樸控制研究中, 通常都是假設在靜態環境下進行, 顯然 這樣的假設不合理。 在本篇論文中使用了一個以 r 鄰居圖(r-neighborhood graph) 為主的拓樸控制機制, 理論上此機制可以讓各節點因應網路的狀態而作適當的調 整, 所以能在移動性的環境中仍然有效率地節省能源。 而本篇論文透過模擬實驗 的方式來分析以及驗證此機制的可行性, 模擬的結果顯示所提出的機制可有效的 節省能源的利用。An Evaluation of the
Adaptive Topology Control Scheme in
Mobile Ad Hoc Networks
Student:Yuan-Yin
Chang
Advisor:Dr. Rong-Hong Jan
I
NSTITUTE OF
C
OMPUTER
S
CIENCE AND
E
NGINERRING
N
ATIONAL
C
HIAO
T
UNG
U
NIVERSITY
Abstract
In recent years, there are many researches on topology control, but few of them take mobility into consideration. However the mobility issue is an important issue in ad hoc networks. In this thesis, we consider an adaptive topology control scheme based on r-neighborhood graph for ad hoc networks with mobile nodes. In this scheme, each node can configure independently and make itself accommodated to the changes of the networks. The scheme can save much more energy in mobile environments. We evaluate our topology control scheme by a set of mobile ad hoc network by simulations. Simulation results show the scheme is practical in mobile ad hoc networks.
誌謝
首先我要感謝我的指導教授簡榮宏老師, 謝謝他這兩年來的敦敦教誨, 讓我 在碩士班期間成長了許多。 還有要謝謝實驗室的夥伴們: 很大方的鴻棋學長、很 強的世昌學長、很宅的嘉泰學長、很愛 kitty 的蕙如學姐、很溫柔的牧英學姐和 雯甄學姐、很幼稚的思敏學姐、超級有錢又很強的奇育學長、很敦厚的瑋倫學長、 很中肯的福文、很熱心的祐慈、很好笑的阿宅、很有品味的奕叡學長、很愛吃的 胖胖、很愛科的陳科科、宅宅的 NCK、明明自己最愛科的佑笙以及很常被欺負的 小黑。 還有在研究所期間認識的朋友們: 小美、馬拉機、godknows、maruco。 謝 謝你們這兩年給予我的幫助和陪伴, 讓我的碩士生涯更為豐富。 最後我要謝謝給 予我最多幫助的家人和男朋友, 如果沒有你們一路上的支持, 我想我無法這麼順 利的走到這裡。要感謝的人實在太多了,族繁不及備載,僅以此論文獻給我最愛 的親人、師長與朋友!目錄 第一章 簡介………..4 1.1 拓樸控制的簡介………..4 1.2 符號簡介………..5 第二章 相關研究………..7 2.1 局部架構………..7 2.2 移動性的拓樸控制研究………..9 第三章 r 鄰居圖的探討……..………11
3.1 r 鄰居圖(The r-neighborhood graph)……….11
3.1.1 RNG、GG 和
NG
r的關係………123.1.2 r 在無線隨意網路上的調整………...14
3.2 一般的 r 鄰居圖(The general r-neighborhood graph)………..14
3.3 變動的 r 鄰居圖(The variant r-neighborhood graph)………15
3.3.1 r 在 VNG 中的調整………15
3.4 r 隔絕區域和 r 轉達區域(The r-enclosed region and the r-relaying region)………...16 第四章 實驗………19 4.1 NG 的模擬r ………..19 4.1.1 網路層的模擬………19 4.1.2 媒介存取控制層的模擬………20 4.1.3 實體層的模擬………20 4.1.4 其他模擬細節………23 4.2 實驗環境設定………...26 4.3 實驗結果………...27 4.3.1 r 與資料流量和廣播流量的關係………...27 4.3.2 在移動環境中找到最佳的r 值……….29 4.3.3 r 值和縮減功率的關係………...30 4.3.4 NG0、NG0.5、NG1 和 VNG 的比較………....31 第五章 結論………..………..…33 參考文獻………..………....34
表目錄
表4-1 模擬NGr的各層設計………...19
表4-2 問候訊息的封包內容………..20 表4-3 實驗設定………..………26
圖目錄 圖2-1 RNG 和 GG 和 YG8………8 圖3-1 u 和 v 所形成的 r 鄰居區域………11 圖3-2 u 和 v 所形成的 GG ………..12 圖3-3 u 和 v 形成的 RNG………12 圖3-4 當 r=0、0.5 和 1 所產生的拓樸………13 圖3-5 在不同 r 時的平均節點分支度……….13 圖3-6 u 和 v 形成一般的 r 鄰居區域………..15 圖3-7 轉達區域的範例………16 圖3-8 r 轉達區域的範例………..17 圖3-9 r 隔絕區域的範例………..18 圖4-1 雙徑傳播模型………21 圖4-2 實作縮減功率的傳輸模型………25 圖4-3 r 和單播流量的關係………..28 圖4-4 r 和廣播流量的關係………..29 圖4-5 移動環境中的最佳 r 值……….30 圖4-6 r 和縮減功率的關係………..31 圖4-7 NG0、NG0.5、NG1 和 VNG 的比較………..32
第一章 簡介
1.1 拓樸控制的簡介
在無線隨意網路(ad hoc networks)中每個可移動節點(mobile node)的能源 (energy)是有限的, 所以節點(node)能調整適當的功率(power)進而減少能源耗損 跟干擾(interference)是很重要的。 這樣的方式就稱做為拓樸控制(topology control)。 近幾年來一直有很多學者針對拓樸控制而提出很多研究, 然而大部分 的研究都只假設在靜態網路的環境。 對於行動無線隨意網路而言這樣的假設顯 然不合理。 我們將移動性(mobility)加入考量後, 由於節點的位置會隨著時間不停的改 變, 故在某個時刻適用的拓樸控制並不一定適用在下一刻, 為了因應這樣的變化, 所以更新拓樸的控制訊息(control message)也要隨著移動性的上升而增加。 然而 隨著控制訊息的大量增加, 節點的能源耗損亦會加快。 因此, 除了一般資料傳輸 的能源耗損外, 我們亦將控制訊息的能源耗損列入考量。 為了減少上述的能源 耗損, 直覺的作法就是減少控制訊息。
究演算法而言, 使用局部鄰居資訊(localized neighborhood information)的分 散式演算法與使用整體鄰居資訊(global neighborhood information), 前者明顯可 以減少控制訊息。 在有提及移動性的相關研究中[1,2,3,4]除了[1]以外, 其餘皆是 屬於此類。 如果我們從廣播的角度來看, 在密實的網路廣播控制訊息會比在稀 疏的網路產生更多的控制訊息; 因此, 在控制訊息大幅增加時, 使用稀疏的拓樸 會比較適合。 我們在這篇論文中使用了一個局部的架構, 稱之為 r-鄰居圖 (r-neighborhood graph)[5]簡稱為NGr, 它會同時考慮資料傳輸和廣播傳輸的能源 耗損。 而使用這個架構產生出的拓樸會有以下幾個特點:
聯結u 和 v, 這是非常重要的特性, 如果所產生的拓樸不包含這樣的特性, 即 代表有些傳輸無法進行。
z 節點分支度(degree)少 : 當網路流量(network traffic)以廣播為主時, 節點分 支度越高(意味著網路拓樸較密實), 會導致廣播風暴的狀況, 如此一來, 各 節點的能源會更加嚴重耗損。 當節點分支度少時, 即可避免這樣的情況發 生。
z 有效能源利用(power efficiency) : 在資料傳輸過程中, 如何選擇善用能源之 路徑以減少能源耗損是件重要的事。 而在這篇論文中, 我們使用了功率評 估因子(power stretch factor)[6]來量化。 這在稍後會做個簡單的介紹。
在理論上的探討, 以NGr為基礎的拓樸控制機制在資料傳輸和廣播傳輸上可 以有效節約能源, 但是並不確定NGr是否能夠實際地應用在現今的無線隨意網路, 所以本篇論文透過實驗的觀察來驗證NGr的可行性。
1.2 符號簡介
在這篇論文中所預設的無線隨意網路是由一個節點集合V 中的節點散佈至 二維平面上, 所有的節點都裝備著一個有向天線, 並且都有相同的最大傳輸範 圍。 任一節點 u 都可以透過全球定位系統或者是其他的方式[7]知道自己目前的 位置。 此外, 每個節點都有自己的辨別代號。整個網路可以用單位圓圖(unit disk graph)來模式化(modeled), 單位圓圖可以 簡稱為UDG(V), 當 uv ≤ 1 時, u 和 v 在 UDG(V)裡才有邊相連。 若經由 uv 這
條連結(link)傳輸, 其所需的最小功率為 uvα。 這個α值會依據環境的設定而不
同[8], 通常是介在 2 到 4 之間。
' ' , ( , ) ( ) max ( , ) G G u v V G P u v G P u v
ρ
∈ = 的介紹。 任兩點節點 u 到 v 的單播路徑(unicast path)以π(u,v)來表示, π (u,v)=v0v1…vh-1vh, v0=u 且 vh=v, 那這條路徑所耗損的總功率可表示成 (1.1) PG(u,v)代表在 G 中從 u 到 v 的單播路徑中功率耗損最小的一條路徑, 假設 G 的子圖為G’, 則 G’相對於 G 的功率評估因子為 (1.2) 最大節點分支度的表示式為 (1.3) dG(u)代表的是在 G 中任意節點 u 的分支度。 接下來的章節安排如下: 第二章會探討相關的研究, 第三章會介紹本篇論文 中所使用的NGr, 第四章則是一系列的實驗來驗證和分析此拓樸控制機制, 第五 章為本篇論文的總結。 1 1( ( , ))
h i i ip
u v
v v
απ
− ==
∑
max( ) max
G( )
u Vd
G
d
u
∈=
第二章 相關研究
在論文[9]的分類法中, 拓樸控制演算法可依據調整傳輸範圍來區分成同質 性(homogeneous)和異質性(non-homogenous) , 同質性代表所有節點都使用相同 的傳輸範圍, 而異質性則是每個節點可以使用不同的傳輸範圍。 其中, 同質性拓 樸控制演算法是屬於中控式演算法, 比較不易實作在現實生活中, 而異質性為分 散式的, 因此異質性拓樸控制這類的分散式架構目前較廣為使用。 且異質性拓 樸控制演算法有一個重要的特點, 稱作局部性(locality)。 局部性的意思是每個節 點可以只依據局部資訊來建構對這個網路的局部觀感(local view)。 這樣的好處 是每個節點只要跟自己的鄰居交流資訊即可。 所以這類演算法的負荷很小, 而 且易於重新建構(reconstruction)。 在 2.1 節中我們介紹幾個在異質性拓樸控制演 算法裡用到的局部架構。2.1 局部架構
常見的局部架構, 主要有下列三種:z 相關鄰居圖(the constrained relative neighborhood graph)[10], 簡稱 RNG(V) , 在V 裡的任意兩節點 u、v, 若在 RNG(V)中 u 和 v 之間有邊存在, 若且為若
i.
uv
≦1 且ii. 以 u、v 為圓心且
uv
為半徑所交集出兩個圓的區域中, 不存在其他節 點 w (w 存在於 V, 且不為 u 和 v)z 加百列圖(the constrained gabriel graph)[11] , 簡稱 GG(V), 在 V 裡的任意兩 節點 u、v, 若在 GG(V)裡 u 和 v 之間有邊存在, 若且為若
i.
uv
≦1 且V, 且不為 u 和 v)
z 姚圖(yao graph)[12] , 簡稱 YG Vuuuuvk( ) (k 必須大於等於 6), 在 V 裡任意一節點
u, 以 u 為中心切割成 k 個圓錐形(cone), 在每個圓錐形裡如果 u 和任一點節 點 v 有邊存在的必要條件為 i.
uv
≦1 且 ii. 在此圓錐形裡不存在其他節點 w, 使得 uw < uv YGk(V)為YG Vuuuuvk( )的無向圖。 圖2-1 RNG 和 GG 和 YG8 我們探討這些架構的功率評估因子和最大節點分支度。 在[13]這篇論文中, 提出了一個稱作XTC 的架構, 簡稱 XTC(V), 在此論文中指出, 他的最大節點分 支度被限制在6 以下, 且 XTC(V)是 RNG(V)的子圖, 只要沒有任何節點擁有兩個 以上與它等距的鄰居, RNG(V)即會等於 XTC(V)。 而這個結果表示在部分情形 下, RNG 的最大節點分支度可以被限制住, 不過 RNG 的功率評估因子卻無法被 限制住[6]。 GG(V)的功率評估因子為 1, 但是最大節點分支度可能為 n-1(其中 n 為 V 裡 面的節點個數), 只要沒有任何節點擁有兩個以上與它等距的鄰居, GG(V)和 RNG(V)即為互補的情形。( ) k YG Vuuuuv 的最大節點向外分支度(out-degree)至多是 k, 而其功率評估因子被限 制在(1/(1 2sin / ))− π k 2 [6], 所以只要 k 值夠小, YG Vuuuuvk( )的最大節點向外分支度和 功率評估因子就能被限制住。 但是由於存在著不對稱邊, 可能導致YG Vuuuuvk( )的最 大節點向內分支度是無法被限制住。 從論文[5]可以更清楚得知以上這三個架構沒有辦法同時限制住最大節點分 支度和功率評估因子, 而本篇論文所使用的
NG
r可以藉由調整r 值來限制住最大 節點分支度和功率評估因子。2.2 移動性的拓樸控制研究
上述所提及的研究大多是沒有考量到有移動性的情況, 然而在無線隨意網 路中的裝置常常都是可移動節點, 所以如果忽略移動的情況實為不合理。 而以 下即為近幾年來針對移動性做探討的拓樸控制演算法。無拓樸的局部資訊協定(Local Information No Topology)簡稱 LINT 和鏈結狀 態拓樸的局部資訊協定(Local Information Link-state Topology)簡稱 LILT[1], 這是 第一個針對移動性所提出的拓樸控制協定。 LINT 是將節點分支度限定在 dmax 和dmin之間, 可以在尋找路由的期間而收集到鄰居的資訊。 如果發現目前的節 點分支度小於dmin, 即將自己的功率調大; 如果發現大於 dmax, 則將自己的功率調 小, 然而它並不能保證網路的連通性。 而 LILT 是以 LINT 為基礎, 只是必須使 用鏈結狀態路由協定, 進而得到一個整體資訊來判定現在網路是否為連通, 再利 用此資訊來做拓樸控制。
LINT 比起 LILT 來得有效率, 而且在真實的環境中, 像 LILT 這種要利用整 體資訊的演算法比較不易實行。 在我們的研究中僅需要局部鄰居資訊即可確保 網路連通性, 較適合運作在真實世界裡。
個參數稱作競爭索引(contention index)簡稱為 CI, CI 的意思是平均在每個節點的 傳輸範圍裡有幾個競爭者, 測量 CI 的方法為, 在控制訊息裡加上節點的辨認代 碼, 所以每個節點偵測鄰居所送出的控制訊息, 即可得知目前的鄰居數目, 而 CI 的值即為鄰居數目加1。 每個節點都存放著一張最佳化表格(optimization table) 來儲存之前實驗得知的最佳CI, 所以可根據查表找出 CI, 然後再找出新的傳輸 範圍來逼近CI。 這個方法的最大好處是不會有多餘的控制訊息負荷, 但是無法 確定每個節點都會發出控制訊息, 所以可能會有安靜節點的存在, 則偵測出的鄰 居數目就不準確, 亦無法得到真實的 CI。 且 CI 是透過實驗找到, 但是現實環境 的變因很多, 沒有辦法ㄧ一做實驗去找出最佳 CI, 所以這類的協定是不易實現 在現實生活中, 而
NG
r可以偵測到精確的鄰居資訊, 較能符合現實情況。 而另一種用來處理移動性的方法, 是使用定期發送控制訊息來更新鄰居資 訊[3,4]。 在控制訊息中加入相關資訊, 當移動性越高的時候, 控制訊息的發送就 會越頻繁。 論文[3]提出的演算法主要分成兩個階段。 第一個階段會使用一次 跳躍(one-hop)鄰居資訊且依據迪科斯撤(Dijkstra)演算法來建構出最短路徑樹 (shortest path tree), 而第二個階段中則是使用 k 次跳躍(k-hop)鄰居資訊來找出是 否有其他最短路徑可以改進最短路徑樹。 處理移動性的方法是定期使用最大功 率發送控制訊息, 當移動性越高的時候, 第二個階段中所使用的 k 值就越小。 雖 然這個演算法可確保連通性且限制住功率評估因子, 但是卻無法限制節點分支 度。 所以當高度移動性的情形下, 控制訊息會越多, 無法限制住節點分支度會導 致廣播情形嚴重而網路負荷過大。 在我們的拓樸控制機制中, 會依據網路流量 的不同而有不同的調整, 所以可以避免控制訊息過多而導致網路癱瘓。 在2.2 節提及的演算法中, 我們可以發現如何隨著移動性的變化來更新鄰居 資訊是個很重要的問題。 在我們的機制裡, 每個節點會根據目前網路的狀態而 使用最適合的拓樸, 在這樣的架構下, 是一個可以容忍任何網路異動性的拓樸控 制協定。第三章 r 鄰居圖的探討
3.1 原始的 r 鄰居圖(The r-neighborhood graph)
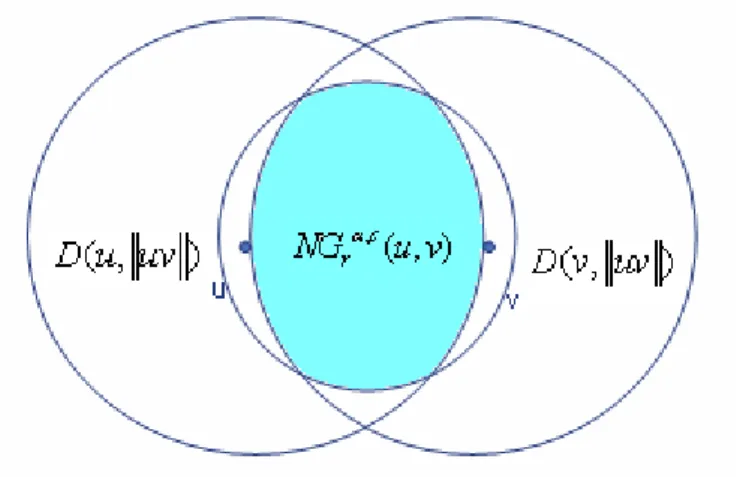
在二維幾何平面R2中任意兩點u、v 的 r 鄰居區域(r-neighborhood region)是 由三個圓交集而成, 以NG u v 表示, 而點 x 為圓心半徑為 d 所構成的圓以r( , ) ( , ) D x d 表示, 其定義如下: (3.1) 而muv為u 和 v 的中點, 1 2 2 2 uv uv l = + r , 0 ≤ r ≤ 1 圖3-1 u 和 v 所形成的 r 鄰居區域 而r 鄰居圖的定義是以 r 鄰居區域為基礎。 若給定一組散佈在 R2的節點集 合V, 則其 r 鄰居圖以NG V 表示, 若任意兩點 u、v 在r( ) NG V 中有邊存在, 則r( ) 代表在NG u v 中不存在其他點 w。 r( , ) ( , ) ( , ) ( , ) ( , ) r uv uv NG u v =D u uv ∩D v uv ∩D m l
3.1.1 RNG、GG 和
NG
r的關係
在第二章提及了幾個知名的局部架構, 而NG V 為其中的 RNG(V)和 GG(V)r( ) 的延伸。 從定義中明顯看出, 當 r=0 時, ( )NG V 等同於 GG(V) ; r=1 時, ( )r NG Vr 等同於RNG(V)。 所以當我們調整 r 從 0 遞增到 1 時, ( )NG V 則會從 GG(V)趨r 向RNG(V)。 在圖 3-4 和圖 3-5 中, 可看出當 r 趨近於 1 時, 平均節點分支度隨 之遞減, 其拓樸亦越稀疏。 而 GG(V)和 RNG(V)的功率評估因子和最大節點分支 度為互補, 所以可藉由調整 r 值讓NG V 具有限制住功率評估因子和最大節點r( ) 分支度。 圖3-2 u 和 v 所形成的 GG 圖3-3 u 和 v 形成的 RNG圖3-4 當 r=0、0.5 和 1 所產生的拓樸
圖 3-5 在不同 r 值時的平均節點分支度
節點的平
均分
3.1.2 r 在無線隨意網路上的調整
在無線隨意網路現有的路由協定主要分成兩個階段: (1)發現路由階段 (2)資 料傳輸階段。 (1) 發現路由階段: 在此階段中, 路由協定會廣播路由訊息來建立路由。 (2) 資料傳輸階段: 依據第一個階段所建構出的路由來進行資料的傳輸 而我們針對這兩個階段來探討有效能源利用, 在第一個階段中是以廣播流 量為主, 當節點分支度越大時, 會使廣播流量更氾濫, 則會耗損更多的能源, 而 稀疏的拓樸會較為適合, 所以此時應將 r 值調大 ; 在第二個階段中是以單播流 量為主, 適合在保留住有效能源利用路徑的密實拓樸進行傳輸, 所以此時應將 r 值調小。 若將移動性也加入考量時, 明顯地在移動性越高的時候, 路由發現階段發生 的頻率會更頻繁, 所以 r 值亦會隨著移動性的增加而遞增。3.2 一般的 r 鄰居圖(The general r-neighborhood graph)
在R2中任意兩點u、v 的一般的 r 鄰居區域以 ,c( , ) r NGα u v 表示, 其定義如下 (3.2) where 0 ≤ r ≤ 1, α≥ 2, c ≥ 0 ,c( , ) { 2| , , ( , ) ( , ) ( , )(1 )} r NGα u v = ∈ℜx ux < uv vx < uv p u x +p x v <p u v +rα
圖 3-6 u 和 v 形成一般的 r 鄰居區域
一般r 鄰居圖是一個將 r 鄰居圖一般化的架構。 可以更符合目前網路的功 率傳輸情況 。
3.3 變動的 r 鄰居圖(The variant r-neighborhood graph)
變動的r 鄰居圖是以一般 r 鄰居圖為基礎, 以 ,c( ) r
VNGα V 表示。 其定義如下: 若V 中任意兩點 u 和 v 在 VNG 中有邊存在, 必須符合以下兩個條件
(1) ||uv|| < Rmax (Rmax為最大傳輸範圍) (2) 沒有任何中間節點落在 ,c( , ) r NGα u v 中, 其中ruv =max{ , }r ru v 而在VNG 中的最大特點是, 每個節點都可以有不同的 r 值。代表著每個移 動節點可以依據目前的狀況來調整適當的r 值。 所以是一個適合運行在真實無 線隨意網路上的局部架構。
3.3.1 r 在 VNG 中調整
在VNG 中每個節點都可以使用不同的 r, r 值該如何選擇才適當。 據前面所述, 我們知道當移動速度越快, r 值應調大。 而所剩的能源越少時, 傳輸功率應 該減小來減少能源的消耗, 即將 r 值調大。 所以我們將移動速度和所剩的能源來 當作r 值選擇的考量。
(3.3)
3.4 r 隔絕區域和 r 轉達區域(The r-enclosed region and the
r-relaying region)
在第二章中提及一般應付移動性的方式, 是使用定期的控制訊息來維護鄰 居資訊。 由於發送此類的控制訊息通常都是使用最大傳輸功率, 所以會很耗損 能源。 在這裡使用了轉達區域(relaying region)[14]的概念。 首先要介紹一下何謂轉達區域。 以圖 3-7 為例。 若有任何節點 v 若在圖中 的灰色區域則表示, 節點 u 透過節點 w 轉達給 v 比起節點 u 直接傳給節點 v 來 得節省能源。 圖 3-7 轉達區域的範例 _ _ 1 _ max_ uremain energy current speed r
total energy speed
⎛ ⎞ ⎛ ⎞
= −⎜ ⎟ ⎜× ⎟
兩點節點u 和 v 的 r-轉達區域以 ,c r RRα 表示 (3.4) 而在V 中任意點 u 的 r 隔絕區域以 ,c r ERα 表示 (3.5) 我們以圖3-8 和 3-9 來簡單解釋一下何謂 r 隔絕區域。 在圖中 3-8 節點 u 已 經分別找出對於鄰居們 a , b , c , d 和 e 的 r 轉達區域, 而這些 r 轉達區域交集出 3-8 圖中的一塊區域, 這代表著不在這塊區域中的節點是必須要透過其他節點來 轉達才會節省能源。 所以節點 u 無需將定期發送的控制訊息傳給不在此區域的 節點。 所以會像 3-9 圖只將傳輸範圍調整成剛好可傳送給在區域內最遠節點的 大小。 圖 3-8 r 轉達區域的範例 ,c
( , ) {
2|
,
, ( , ) ( , )
( , )(1
)}
rRR
αu v
= ∈ℜ
x
uv
<
ux vx
<
ux p u v
+
p v x
<
p u x
+
r
α , , max ( )( )
(
( ,
)
c( , ))
c r r uv UDG VER
αu
D u T
RR
αu v
∈=
I
ℵ∩
−
第四章 實驗
4.1
NG
r的模擬
在這個章節中我們使用網路模擬器(network simulator 2)簡稱 ns2[15]來評估 以為NG
r基礎的拓樸控制機制。 ns2 是一個由卡內基美隆大學(CMU)裡的研究 小組發展出的網路模擬器。 我們將此拓樸控制機制使用 C++在 ns2 上模擬。 模 擬修改的部份可簡單分成三層如表 4-1。 表 4-1 模擬NGr的各層設計 網路層 序列目的節點距離向量路由協定 媒介存取控制層 802.11 媒介存取控和訊標機制 實體層 無線實體模型和無線傳播模型和能源模型4.1.1 網路層的模擬
在網路層方面, 我們使用序列目的節點距離向量路由協定(destinationsequenced distance vector routing protocol) [16]簡稱 DSDV。 在 DSDV 中, 每個節 點都會維護一張路由表, 然後在每個路由中都會標明一個序列號碼(sequence number)可讓人分辨路徑時效性與正確性。 並且會定期廣播路由更新。 對於路 由更新是使用了兩種更新的封包分別為全部更新(full update)和增額的更新 (incremental update)。 兩者的差異在於全部更新是當廣播全部的路由表所使用的, 而增額的更新只是用來更新部份路徑資訊。 我們的機制裡期望所有路由都是有 效能源利用之路徑, 但原本的 DSDV 使用跳(hop)數當作路由度量值(metric), 所 以我們改成使用能源消耗當作路由度量值。
4.1.2 媒介存取控制層的模擬
在媒介存取控制方面, 我們使用的是 ns2 裡支援的 802.11 媒介存取控制, 並 額外增加訊標(beacon)機制。 假設每個移動節點都備有全球定位系統, 可知道自 己的所在位置, 並且會定期(每 100 毫秒)發送問候訊息(hello message), 問候訊息 裡夾帶一些基本資訊(表 4-2), 可藉此來維護鄰居資訊。 表 4-2 問候訊息的封包內容 辨別代號 每個節點都有特定的辨別代號以方便辨別 位置 目前所在的x , y 座標 r 目前所使用的r η 在r 隔絕區域裡最遠的鄰居距離4.1.3 實體層的模擬
在實體層方面, 主要是使用到 ns2 裡面支援的無線實體模型(WirelessPhy)和 無線傳播模型(radio propagation model )和能源模型(EnergyModel)。 無線實體模 型的部份是根據朗訊(Lucent)公司製造的無線區域網路(WaveLAN)的直序列頻譜 擴展技術(DSSS)所設計。 而 ns2 中無線傳播模型有自由空間模型(Free space model)和雙徑傳播模型(Two-ray ground model)兩種。z 無線傳播模型 自由空間模型是適用在傳送者和接收者之間沒有障礙物時, 無線訊號走的 是完全無阻檔的路徑, 而當接收者距離傳送者 d 公尺時, 其接收者可接受到的 訊號強度為 (4.1) 2 2 2 Pr (4 ) t t r PG G d L λ π =
但在真實無線網路環境中, 傳送者和接收者間的無線訊號通常還會受到其 他障礙物的干擾, 所以自由空間模型可能就無法完全適用。 而在雙徑傳播模型 裡不只考慮了傳送者和接收者的直接路徑而且亦將地面反射的路徑也加入考量, 其公式如式子4.2 圖 4-1 雙徑傳播模型 (4.2) 而在ns2 裡近距離時是使用自由空間模型, 而遠距離時是使用雙徑傳播模 型。 其距離遠近是根據式子 4.3 算出的 dc來判定。 (4.3) 其中, Pt 為發送者所發射的功率, Pr 接受者接收的功率, Gt 和 Gr 分別為發送 者和接受者的天線增益(antenna gain), λ為無線電波的波長, d 為發送者和接受 者之間的距離, L 為與傳播無關的系統損耗因子, ht和hr為發送者和接受者的天線 高度。 在 ns2 中各個參數所給的值如下: Pt = 3.625e-10 瓦, λ= 0.3282 公尺, Gr = Gr = 1.0, L = 1.0, ht = hr = 1.5 公尺, dc = 86.1425 公尺 z 能源模型 2 2 4 Pr PG G h ht t r t r d L = (4 ) / c t r d = πh h λ
在ns2 中是使用能源模型來計算能源消耗, 在能源消耗過程主要可以分成傳 輸和接收兩部份。 (1) 傳輸: 傳送者在傳送封包時, 所耗損的能源為(傳送時間*Pt_consume) 焦耳 (2) 接收: 接收者在接收封包時, 會先使用上述公式來計算出 Pr, 然後檢查 z Pr < CSThresh : 則將這個無線訊號當作雜訊丟掉 z CSThresh < Pr < RXThresh : 能偵測到這個無線訊號但是不能正確的解 碼, 所以把此無線訊號當做錯誤訊號 z Pr > RXThresh : 則可以正確接受此訊號, 往上傳給媒介存取控制層, 所耗損的能源為 (接收時間*Pr_consume) 焦耳
其中, CSThresh 為載波檢側門檻(carrying sensing threshold), RXThresh 為接 收門檻(receiving threshold), Pt_consume 為每秒傳輸所需消耗的能源, Pr_consume 為每秒接收所需消耗的能源。 在 ns2 裡的預設值如下: CSThresh=1.559e-11 瓦, RXThresh=3.652e-10 瓦, Pt_consume=0.66 瓦, Pr_consume=0.395 瓦。
z 修改過的能源消耗模型 在我們的機制裡每個移動節點都可以自我調整適當的功率, 而功率的計算 方式亦是利用ns2 裡面的無線傳播模型。 其中, Pr 的值設成 RXThresh 亦為 3.652e-10 瓦, 其餘皆和原本設定相同。 由此而計算出 Pt 的值, 則在每次傳輸時 皆依據目前傳送的需要來調整適當功率。 而 Pt_consume 改成 Pt, 所以每次單位 時間傳輸所消耗的能源也會隨著每次傳輸所調整的功率而改變。 在我們的研究 裡假設接收封包不需耗費額外的能源, 所以 Pr_consume 設為 0。
而傳輸的過程中, 主要會處理三種型態的封包, 分別為資料(data)封包、控制 (control)封包和問候訊息。 依據不同型態的封包在傳送時也有不同調整功率的方 式。 z 資料封包: 將功率調整成剛好傳送至下一跳(next hop) z 控制封包: 將功率調整成傳送給距離自己最遠的
NG
r的鄰居 z 問候訊息: 將功率調整成傳送給所有可能會成為自己的NG
r的鄰居4.1.4 其他模擬細節
每個節點皆維護三張鄰居表格(neighborhood table), 分別為實體鄰居列表 (physical neighborhood list)、邏輯鄰居列表(logical neighborhood list)和阻擋鄰居列 表(block neighborhood list)。 其定義如下:z 實體鄰居列表 : 代表存在在感測範圍內的鄰居 z 邏輯鄰居列表 : 代表NGr的鄰居 z 阻擋鄰居列表 : 代表所有可能阻擋1的鄰居 所以每當收到一個問候訊息時, 代表發出問候訊息的節點存在自己的感測 範圍內, 即將此節點加入實體鄰居列表裡。 再檢查與此節點的距離是否大於問 候訊息裡的η, 若大於η則代表自己不可能成為對方的NGr的鄰居, 所以不將對 方加入自己的阻擋鄰居列表; 反之則將對方加入阻擋鄰居列表。 1若有任兩點節點 u 和 v, 若節點 v 不為節點 u 的邏輯鄰居, 則節點 u 必須從其他邏輯鄰居 w 得 知節點 v 落在 RR(u, w), 此情況稱作 v 被阻擋。
z 縮減功率的模擬實作 因為使用最大功率定期發送問候訊息會耗損很多能源, 而在第三章時提及 了r 傳達區域和 r 阻擋區域, 所以我們利用此概念來找出縮減 功率以代替最大功 率。 在每次收到問候訊息後, 利用實體鄰居列表來找出 r 阻擋區域, 而在 ns2 裡 面每個節點的最大傳輸範圍為250 公尺, 所以我們實作的方式是將整個傳輸範圍 切割成50*50 格小正方形如圖 4-2, 每個正方形為 10 公尺*10 公尺, 然候檢查每 個正方形的中心是否有落在任一個實體鄰居的r 轉達區域。 若皆無, 則將此方格 視為落在r 阻擋區域裡。 反之, 則將此方格視為不在 r 阻擋區域裡。 而依此流 程我們可以找出大略的r 阻擋區域, 可以算出λ 和
χ
, 定義如下: (4.4) (4.5) 其中, B 為任一節點 u 的阻擋鄰居列表, 而u ℵ為佈建區域。 縮減功率則從 λ 和χ
中取最大值。max{
|
,
}
uux
x
ER x
uλ
=
∈
∈ℵ
max{
|
}
uuv v
B
uχ
=
∈
圖 4-2 實作縮減功率的傳輸模型
50
4.2 實驗環境設定
本實驗環境所有參數的設定值如表 4-3 所列。 表 4-3 實驗設定 參數 值 佈建區域 模擬時間 節點個數 網路流量 速路 封包大小 最大傳輸範圍 路由協定 移動模型 速度 暫停時間 能源模型 初始能源 1000 公尺*1000 公尺 200 秒 100 20% 節點產生固定位元速率(CBR) 的流量 11MB 256 位元組(bytes) 250 公尺 DSDV隨機移動模型(Random Waypoint Model)
[0,1]公尺/秒 , [0,5]公尺/秒 , [0,10]公尺/秒 , [0,15]公尺 /秒 , [0,20]公尺/秒 [0,20]秒 能源模型 0.5 焦耳 z 本實驗將探討平均傳輸、平均廣播功率、平均問候訊息及平均消耗功率分別 定義如下: 平均傳輸功率: 平均每次單播所耗損的能源 平均廣播功率: 平均每次廣播所耗損的能源 平均問候訊息的功率: 平均每個問候訊息所耗損的能源 平均消耗功率: 平均每個成功傳送的封包所耗損的能源
4.3 實驗結果
我們設計了四個實驗, 分別探討 r 與資料流和廣播流量的關係、在移動環境 中找到最佳的 r 值、r 值和縮減功率的關係與NG0、NG0.5、NG1 和 VNG 的比 較。其實驗結果分別如下:4.3.1 r 與資料流量和廣播流量的關係
在這個實驗我們要觀察的是在r 和兩種不同流量的關係。 圖 4-3 是觀察平 均每一個成功傳送的封包所耗損的單播能源和r 的關係。 從圖中可看出當 r 值 增加時所需的單播能源亦隨之增加, 這是由於當 r 值增加時, 其拓樸較難保留住 有效能源利用路徑, 所以單播所需的能源會上升。 不過從圖 4-3 中看到 r=0 的單 播能源反而是比r=0.1 和 0.2 時來的大, 原因可能是當 r=0 時的拓樸比較密實, 所 以干擾比較大, 能夠成功傳送的封包會相對比較少, 有可能因此而使得平均單播 所需的能源上升。 在圖 4-4 是觀察平均每個廣播訊息耗損的能源和 r 的關係。 理 論上r 值越大時, 平均節點分支度會越小, 所以平均廣播功率亦變小, 而從圖中 也看出當r 值增加時, 平均每一次廣播所需的能源會下降。圖 4-3 r 值和單播流量的關係 平均每個 單播 訊息所耗 損的 能源(焦耳 )
圖 4-4 r 值和廣播流量的關係
4.3.2 在移動環境中找到最佳的 r 值
接著, 我們要觀察的是移動性的環境對 r 值的影響。 在這個實驗我們要找出 在不同的移動性時, 耗損最少能源的 r 值以 r*代表, 理論上, 當移動性上升時, 拓 樸變動就越劇烈, 所以重新路由的情形會越頻繁, 而廣播次數亦跟著上升, 所以 r 值的選擇應該要隨之遞增。 我們總共作了六個不同層次的移動性, 在圖 4-5 可 看到在靜態環境中, 最佳的 r 為 0.3, 而隨著移動性增加, 最佳的 r 亦跟著增加。 當移動的速度大於10 公尺/秒, 最佳的 r 亦升到 0.7 以上。 由於 10 公尺/秒以上 的速度已經是慢速開車, 所以這樣的速度亦算快速移動, 而在這樣快速的移動性 環境裡使用0.7 以上的 r 值亦算合理。 平均每個 廣播 訊息所耗 損的 能源(焦耳 )圖 4-5 移動環境中的最佳 r 值
4.3.3 r 值和縮減功率的關係
由於移動性會讓拓樸產生變動, 為了維護鄰居資訊以實行拓樸控制, 所以使 用定期的問候訊息為最簡單的方法。 在這個實驗裡, 我們分別使用最大功率和 縮減功率來發送問候訊息, 在圖 4-6 中我們看到使用最大功率時, 平均每個問候 訊息所耗損的能源大約維持在12e-5 焦耳, 而當使用縮減功率時, 平均每個問候 訊息所耗損的能源會隨著r 值增加而遞減。 最多約可節省 33%的能源。 移動速度(公尺/秒)圖4-6 r 值和縮減功率的關係
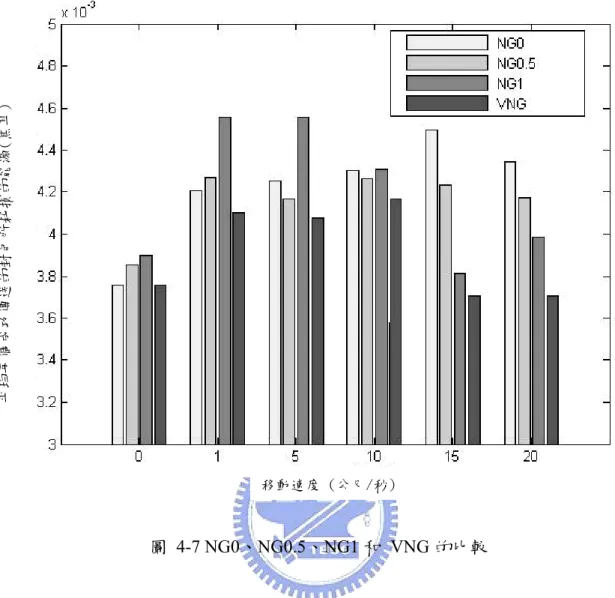
4.3.4 NG0、NG05、NG1 和 VNG 的比較
在真實無線隨意網路中, VNG 才是可實行的拓樸控制機制。 而最後的實驗 中, 我們要比較NG
r和VNG 的能源消耗。 在實驗中, 我們同樣使用六個不同層 次的移動性來測試, 而NG
r的r 使用 0、0.5 和 1 來和 VNG 作比較。 當移動性 為0 時, NG0 和 VNG 所耗損的能源最少。 移動性上升至 1 時, 雖然 NG0 比 NG0.5 和NG1 耗損的能源少, 卻比 VNG 耗損的多, 在接下來幾個不同的移動性仍可看 出VNG 所耗損的能源為裡面最少。 平均每個 問候 訊息所耗 損的 能源(焦耳 )圖 4-7 NG0、NG0.5、NG1 和 VNG 的比較 移動速度 (公尺/秒) 平均每個 成功 傳送的封 包所 耗損的能 源(焦耳)
第五章
結論
在本篇論文中所使用的NG
r, 是一個可以同時限制住最大節點分支度和功 率評估因子的架構, 強調在資料傳輸和廣播傳輸上皆可有效節省能源, 並且為了 能運行在實際網路上, 更延伸出符合一般功率消耗和分散式調整 r 的 VNG 架構。 由第四章一系列實驗的觀察, 發現在不同層次移動性的環境中, VNG 都能因應網 路的變異性而有效率地節省能源, 這也驗證 VNG 架構的拓樸控制機制能適應現 實網路的多變性, 所以此機制在現今的無線隨意網路上是可行的。參考文獻
[1] L. Feeney, “An energy-consumption model for performance analysis of routing protocols for mobile ad hoc networks”, ACM Journal of Mobile Networks and
Applications, vol. 3, no. 6, pp. 239-249, 2001
[2] R. Ramanathan, and R. R-Hain, ”Topology Control of Multihop Wireless Networks using Transmit Power Adjustment”, In Proc. of the IEEE Computer and
Communications Societies, vol. 2, pp. 404-413, 2000
[3] J. Liu and B. Li, “MobileGrid : Capacity-aware Topology Control in Mobile Ad Hoc Networks”, IEEE Eleventh International Conference, pp. 570-574,2002
[4] S. C. Wang, D. S. L. Wei , and S. Y. Kuo, ”SPT-Based Power-Efficient Topology Control For Wireless Ad Hoc Networks”, IEEE Military Communications Conference, vol. 3, pp. 1483-1490, 2004
[5] A . A. K. Jeng and R. H. Jan, “The r-Neighborhood Graph: A Novel Structure for Topology Control in Wireless Ad Hoc Networks”, IEEE Transactions on Parallel and
Distributed Systems, 2005 (SCI, EI)
[6] J. Wu and F. Dai, “Mobility-Sensitive Topology Control in Mobile Ad Hoc Networks”, Proceeding of the 18th
International Parallel and Distributed Processing Symposium, pp. 28-38, 2004
[7] R. Wattenhofer and A. Zollinger, “XTC: A practical topology control for ad-hoc networks”, In Proc. of the 18th
[8] X. Y. Li, P. J. Wan, and Y. Wang, “Power efficient and sparse spanner for wireless ad hoc networks”, IEEE International Conference on Computer Communicationsand
Networks, pp. 564-567, 2001
[9] W. H. Lee and T. H. Meng, “A lower power GPS receiver architecture”, Global
Telecommunications conference, vol. 11, pp. 153-157, 1999
[10] P. Santi , “Topology Control in Wireless Ad Hoc and Sensor Networks”, John
Wiley & Sons, Ltd, 2005
[11] G. T. Toussaint, “The relative neighborhood graph of a finite planar set”, Pattern
Recognition, vol. 12, no. 4, pp. 261-268, 1980
[12] K. R. Gabriel and R. R. Sokal, ”A new statistical approach to geographic variation analysis”, Systematic Zoology, vol 18, pp. 259-278, 1969
[13] A. C. C. Yao, “On constructing minimum spanning trees in k-dimensional spaces and related problems”, SIAM Journal of Computing, vol. 11, pp. 721-736, 1982
[14] V. Rodoplu and T. Meng, “Minimum energy mobile wireless networks”,IEEE
Journal of Selected Area in Communications,pp1333-1344,1999
[15] K. Fall and K. Varadhan,”The ns manual”,The VINT Project,UCB, LBL, USC/ISI and Xerox PARC,http://www.isi.edu/nsnam/ns/doc/,2002
[16] C. E. Perins and P. Bhagwat, “Highly dynamic destination-sequenced
distance vector (DSDV) for mobile computers”, ACM Special Interest Group on