國 立 交 通 大 學
電信工程學系
碩 士 論 文
利用多喇叭實現強健串音消除系統
Robust Crosstalk Cancellation for 3D Sound
Using Multiple Loudspeakers
研究生:蘇大中
指導教授:謝世福 博士
利用多喇叭實現強健串音消除系統
Robust Crosstalk Cancellation for 3D Sound
Using Multiple Loudspeakers
研究生 :蘇大中 Student:D. J. Su
指導教授:謝世福 Advisor:S. F. Hsieh
國 立 交 通 大 學
電信工程學系碩士班
碩士論文
A ThesisSubmitted to Department of Communication Engineering College of Electrical and Computer Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Electrical Engineering September, 2006
Hsinchu, Taiwan, Republic of China
利用多喇叭實現強健串音消除系統
學生:蘇大中 指導教授:謝世福
國立交通大學電信工程學系碩士班
摘要
傳統串音消除技術是針對一對喇叭來實現。而串音消除器主要的問題來自於 容易受到擾動的影響。由文獻可得知,當喇叭數增加則串音消除器消除串音的能 力亦隨之提升。同時,多喇叭架構對於擾動而造成雙耳音訊失真的效應較一對喇 叭要來得輕微。在本篇論文中,我們將呈現各種不同形態的串音消除器在三個喇 叭架構下,並且能夠達到節省成本及計算複雜度的目標。我們也會針對兩個喇叭 和三個喇叭架構的串音消除器作擾動分析,以及透過模擬數據來作為分析的依 據。Robust Crosstalk Cancellation for
3D Sound Using Multiple
Loudspeakers
Student : D. J. Su Advisor : S. F. Hsieh
Department of Communication Engineering
National Chiao Tung University
Abstract
Traditional crosstalk cancellation is for two loudspeakers. The most critical
problem bothering us is the effect of perturbation. In several literatures, we know that
multiple loudspeakers arrangement results in good performance of crosstalk
cancellation. In addition, it is more robust for perturbation than two loudspeakers
setup. In this thesis, we show different types of crosstalk canceller of multiple
loudspeakers arrangement and economical realizations with less computational
complexity is achievable. Perturbation analysis is proposed in comparing two and
three loudspeakers setup. The simulation results are used to compare their
Acknowledgement
I would like to express my deepest gratitude to my advisor, Dr. S. F.
Hsieh, for his enthusiastic guidance and great patience, especially the
autonomy in research. I also appreciate my friends for their inspiration
and help. Finally, I would like to show my thanks to my parents for their
unceasing encouragement and love.
Contents
Chinese Abstract i
English Abstract ii
Acknowledgement iii
Contents iv
List of Tables vii
List of Figures ix
1 Introduction
...12 Transaural Stereo System
………42.1 Spatial Audio……….………..5
2.2 HRTFs……….6
2.3 Crosstalk cancellation………8.
2.3.1 Problem Formulation………9.
3 Crosstalk Cancellers
…...123.1 Conventional Two Loudspeakers Arrangement……...…….………13
3.2.1 Direct Forward Type………..…..………17
3.2.2 Least Square Forward Type………19
3.2.3 Shuffler Structure………20
3.2.4 A Simplified Shuffler Form.…..…………..………24
3.2.5 A Simplified Shuffler Form of Four Loudspeakers Arrangement…...28
3.2.6 Reduced-Order Modeling………31
4 Perturbation Analysis
…...…….………324.1 Perturbation Analysis for Filter Modeling..……….……….33
4.1.1 Analysis on Shuffler Form of Two Loudspeakers Setup...…………34
4.1.2 Analysis on Shuffler Form of Three Loudspeakers Arrangement...…38
4.1.3 Analysis on Simplified Shuffler Form…..………...44
4.2 Perturbation Analysis for Headmovement.…...………47
4.3 Optimum Loudspeakers Position for Robust Crosstalk Canceller…………50
4.3.1 Two Loudspeakers Arrangement………...……...…………52
4.3.2 Three Loudspeakers Arrangement………...………54
4.3.3 Four Loudspeakers Arrangement……….………56
4.4 Conclusions………59
5 Computer Simulations
……..………605.2 Two Loudspeakers Geometric………..……63
5.3 Three Loudspeakers Geometric………66
5.3.1 Least Square Forward Type………...……...………66
5.3.2 Shuffler Structure………...………..71
5.3.3 A Simplified Shuffler Form………...73
5.3.4 A Simplified Shuffler Form of Four Loudspeakers Arrangement…...78
5.4 Perturbation Analysis………82
5.4.1 Simulations on Filter Modeling………...……...……84
5.4.2 Simulations on Head movement………...……….91
6 Conclusions
……….……….95List of Tables
5.1 The performance of shuffler form for two loudspeakers setup with different order
of FIR filters……...63
5.2 The CSF with different degree of freedom of the center loudspeaker………….65
5.3 The performance of least forward type crosstalk canceller for three loudspeakers
setup with different order of FIR filters………..66
5.4 The performance comparison of crosstalk cancellation by using least square
method for different numbers of loudspeakers arrangement………...67
5.5 The performance of shuffler form for three loudspeakers setup with different FIR
filter order………70
5.6 The performance of simplified shuffler form for three loudspeakers setup with
different orders of FIR filters………..…74
5.7 The performance of simplified shuffler form for four loudspeakers setup with
different orders of FIR filters………79
5.8 The error norm of equalization and crosstalk part for two loudspeakers shuffler
5.9 The performance of crosstalk cancellation for two loudspeakers shuffler form
after head movement………...91
5.10 The performance of crosstalk cancellation for three loudspeakers simplified
shuffler form after head movement………92
5.11 The performance of crosstalk cancellation for four loudspeakers simplified
List of Figures
2.1 The ITD and ILD………6
2.2 The setup of the dummy head………8
2.3 Signal and transfer function definitions for transaural stereo………10
3.1 Crosstalk cancellation system (Atal and Schroeder in 1963)………...13
3.2 Shuffler filter structure (Cooper and Bauck in 1989)………14
3.3 Geometry and transfer functions for three loudspeakers………..17
3.4 The structure of the direct forward type crosstalk canceller………18
3.5 The shuffler topology of three loudspeakers geometric (Cooper and Bauck in 1996)……….22
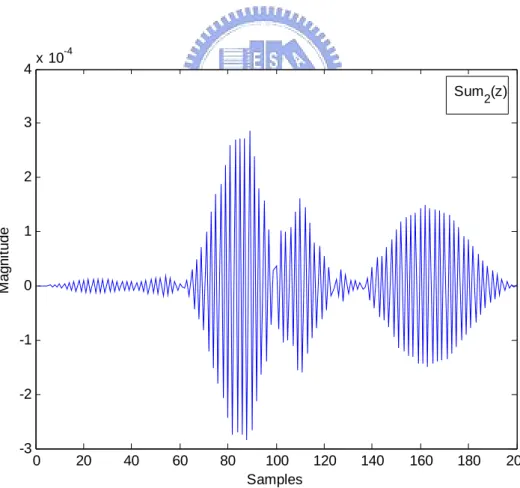
3.6 The impulse response of the filter ∑ ………22 2 3.7 The impulse response of the filterC ………...23 2 3.8 The impulse response of the filter ∆ ………23 2 3.9 The simplified shuffler structure of crosstalk canceller for three loudspeakers arrangement………26
3.11 The impulse response of the filter∆ ………...27 3
3.12 Geometry and transfer functions for four loudspeakers………...28
3.13 The simplified shuffler structure of crosstalk canceller for four loudspeakers arrangement………30
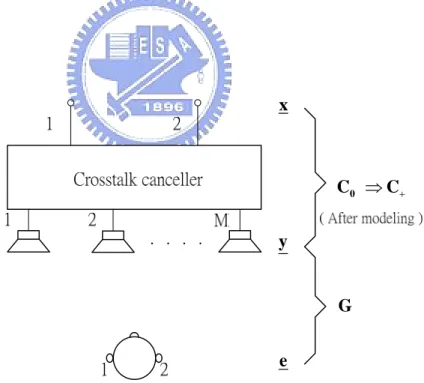
4.1 The geometry of crosstalk cancellation system for multiple loudspeakers after filter modeling………..31
4.2 The factorized two loudspeakers shuffler form………33
4.3 The factorized three loudspeakers shuffler form………37
4.4 The factorized three loudspeakers simplified shuffler form………44
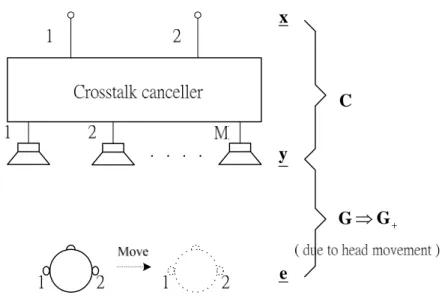
4.5 The geometry of crosstalk cancellation system for multiple loudspeakers due to head movement………46
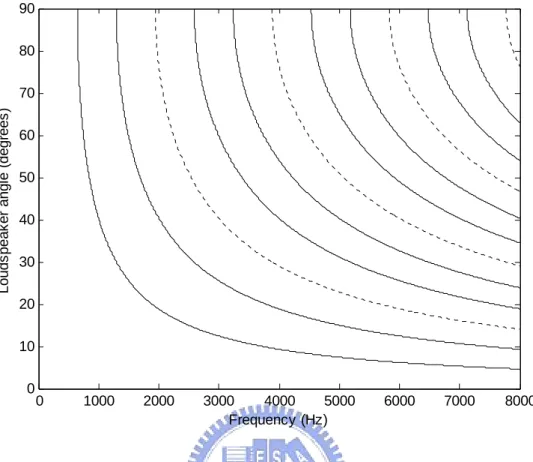
4.6 The condition numbers of G with different loudspeakers position………….51 2 4.7 The condition numbers of G with different loudspeakers position………….53 3 4.8 The robust bandwidth of different number of loudspeakers with the side loudspeakers located at ± °30 ………..56
5.1 The crosstalk cancellation results in frequency domain by using least square error method with loudspeaker located at ±30D………63
5.2 The crosstalk cancellation results in time domain by using least square method with loudspeaker located at ±30D………64
5.3 The crosstalk cancellation results in frequency domain of least square forward
type with the side loudspeakers located at ±30D and the center one located at
0D………66
5.4 The crosstalk cancellation results in time domain of least square forward type
with the side loudspeakers located at ±30D and the center one located at 0D...67 5.5 The signal power ratio R of different numbers of loudspeakers with different c
filter orders………...68
5.6 The total errorε of different number of loudspeakers with different filter
orders………....68
5.7 The crosstalk cancellation results in frequency domain of shuffler structure with
the side loudspeakers located at ±30D and the center one located at 0D……...70 5.8 The crosstalk cancellation results in time domain of shuffler structure with the
side loudspeakers located at ±30D and the center one located at 0D………….71 5.9 The crosstalk cancellation results in frequency domain of simplified shuffler
form.………..74
5.10 The crosstalk cancellation results in time domain of simplified shuffler form…76
5.11 The CSF of different structure crosstalk canceller of three loudspeakers
arrangement………..76
arrangement………..77
5.13 The total error of different structure crosstalk canceller of three loudspeakers
arrangement………..77
5.14 The crosstalk cancellation results in frequency domain of simplified shuffler
form of four loudspeakers setup………...79
5.15 The crosstalk cancellation results in time domain of simplified shuffler form of
four loudspeakers setup………80
5.16 The signal power ratio after crosstalk cancellation R of two loudspeakers c
shuffler form and three and four loudspeakers simplified shuffler form with
different FIR filter orders……….81
5.17 The total error of two loudspeakers shuffler form and three and four
loudspeakers simplified shuffler form with different FIR filter orders…………81
5.18 The crosstalk cancellation result in frequency domain after perturbing………..83
5.19 The crosstalk cancellation result in time domain after perturbing………...83
5.20 The norm of equalized error of two loudspeakers shuffler form with different
orders of IIR filter………86
5.21 The norm of crosstalk error of two loudspeakers shuffler form with different
orders of IIR filter………87
5.23 The crosstalk error of shuffler form versus direct forward type 2………...88
5.24 The equalized error of different structures of crosstalk canceller with different
IIR filter orders……….90
5.25 The crosstalk error of different structures of crosstalk canceller with different IIR
filter orders………...90
5.26 The signal power ratio R of crosstalk cancellation after head moving for c
different numbers of loudspeakers………...94
5.27 The total error of crosstalk cancellation after head moving for different numbers
Chapter 1
Introduction
Using immersive audio techniques it is possible to render virtual sound sources in
3D space via a set of loudspeakers or headphones. The goal of such systems is to
reproduce the same sound pressure level at the listener’s eardrums that would be
present if a real sound source was placed in the location of the virtual sound source.
However, reproducing the 3D sound via two or more loudspeakers will suffer from
several factors to degrade the performances, such as room reverberance, crosstalk
disturbance and imperfection of the loudspeakers. In this thesis, we will focus on
crosstalk cancellation.
Previous work [13] has investigated that the design of conventional crosstalk
cancellation systems which deliver binaural audio to a listener has the serious
demonstrated that the performance of crosstalk canceller suffered from head
movement and have mathematically calculated the robustness of crosstalk
cancellation system. The approach proposed in [1] is to track the listener and adjust
the loudspeaker signals to maintain the binaural transmission so that a more robust
crosstalk canceller is possible. Recent work [9, 23] has demonstrated that if a number
of loudspeakers is used which exceeds the number of points in the listening space, the
performance of such a system can be improved. In such case, the reproduction is
sought and has better immunity of the head movement. Therefore, multi-channel
sound reproduction is our main focus in this thesis.
In this thesis, we will discuss how to synthesize the aural virtual reality
environment via multiple loudspeakers. We will focus on how to reduce the crosstalk
and design different types of crosstalk canceller so that the 3D sound can be
reproduced at listener’s ear precisely. Also, we will discuss how to factorize the
crosstalk canceller matrix so that economical realizations and less computation are
possible. In addition, we will discuss the robustness of crosstalk canceller by
perturbation analysis. The perturbation analysis of different structures of crosstalk
canceller for multiple loudspeakers arrangement is shown in chapter 4.
This thesis is organized as follows. In chapter 2, we will introduce the properties of
loudspeakers. Chapter 3 focuses on the design of crosstalk canceller using three
loudspeakers. Chapter 4 is the main part of this thesis; we will investigate the
robustness of crosstalk canceller and derive the optimum loudspeakers position for
different number of loudspeakers arrangement. In chapter 5, we will use computer
simulations to compare performances of different crosstalk cancellers and discuss the
robustness of crosstalk canceller. In chapter 6, we will make a conclusion to
Chapter 2
Transaural Stereo System
A transaural stereo system uses the binaural sound recording and reproduces them.
The system may have more than two loudspeakers. We will focus on the transaural
system with multiple loudspeakers. In this chapter, we will first introduce how the
human localize the sound source by the principle of ITD (interaural time differences)
and ILD (interaural level difference).
In section 2.2, we will illustrate how HRTFs (head-related transfer functions) can
aid in distinguishing sound location from one position to listener. Section 2.3 will
investigate the problems encountered in binaural reproduction via loudspeakers and
the idea of crosstalk canceller will be presented in detail. In the last section, we will
investigate the design of the transaueal stereo system and two types of layout
2.1 Spatial audio
The human hearing process is based on the analysis of input signals to the two ears
for differences in intensity, time of arrival, and directional filtering by the outer ear.
[11], [12] identified two basic mechanisms as being responsible for sound location
which are ITD (interaural time differences) and ILD (interaural level difference). As
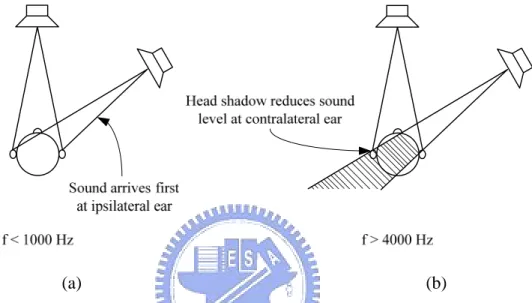
described in [21], ITD and ILD cues that operated in different wavelength. For short
wavelengths (corresponding to frequencies in the range of about 4–20 kHz), the
listener’s head casts an acoustical shadow giving rise to a lower sound level at the ear
farthest from the sound source (ILD) as shown in Figure 2.1. (b). At long wavelengths
(corresponding to frequencies in the range of about 20 Hz–1 kHz), the head is very
small compared to the wavelength, and localization is based on perceived differences
in the time of arrival of sound at the two ears (ITD) as shown in Figure 2.1. (a). The
two mechanisms of interaural time and level differences formed the basis of what
became known as the duplex theory of sound localization. In the frequency range
between approximately 1 and 4 kHz, both of these mechanisms are active, which
results in several conflicting cues that tend to cause localization errors.
While time or intensity differences provide source direction information in the
horizontal plane, in the median plane, time differences are constant and localization is
head, torso, shoulders, and pinna, combined with resonances caused by the ear canal,
form the physical basis of the head-related transfer functions (HRTFs).
2.2 HRTFs
3D audio rendering systems are based on digital implementations of such
head-related transfer functions (HRTFs). In principle, it is possible to achieve
excellent reproduction of 3D sound fields using such methods, however, this requires
precise measurement of each listener’s individual HRTFs. In fact, the magnitude and
phase of these head-related transfer functions vary significantly not only for each
(a) (b)
Figure 2.1 The ITD and ILD. (a) In the low-frequency regime, sound is localized based on differences in the time of arrival at each ear. (b) At higher frequencies, sound localization is based on perceived level differences caused by head shadowing.
sound direction, but also from person to person. Current research [7] in this area is
focused on achieving good localization performance while using nonindividualized
HRTFs derived through averaging or modeling or based on the HRTFs of subjects that
have been determined to be “good localizer”. In [26], Begault found that there are
currently three major barriers in 3D audio implementations: 1) psychoacoustic errors
such as front-back reversals typical in headphone-based systems, 2) large amounts of
data required to represent measured HRTFs accurately, and 3) frequency and phase
response errors that arise from mismatches between nonindividualized and measured
HRTFs.
The HRTFs database we use is from MIT Multi-Media Lab in [27], each HRTFs
has 512 samples and with 44.1 kHz sample rate. The pickup of the HRTFs is a pair of
microphones embedded in the ears of a dummy head to simulate the ears of the
human head. The setup of the dummy head is shown in Figure 2.2. The spherical
space around the dummy head was sampled at elevations from -40 degrees (40
degrees below the horizontal plane) to +90 degrees (directly overhead). At each
elevation, a full 360 degrees of azimuth was sampled in equal sized increments. The
increment sizes were chosen to maintain approximately 5 degree great-circle
increments. In total, 710 different positions were sampled at elevations from -40
2.3 Crosstalk Cancellation
A simple way to reproduce the 3D sound is using headphones. Listening the
binaural signals via headphones can avoid the crosstalk interference, since the audio
signals are sent solely to their own destination. Because the listener would feel the
virtual sound image exists inside the head and be unable to provide sufficient realistic
perceptual feeling. Hence, using headphone for 3D sound might not be proper. To get
rid of the phenomenon, we would replace the headphones with two or more
loudspeakers.
In the case of conventional crosstalk canceller, this situation states playbacking the
binaural signals via a pair loudspeakers for one listener. However, the left ear of
listener received the sound not only from the left loudspeaker but also the right Figure 2.2 The setup of the dummy head.
loudspeaker and vice versa. This phenomenon is called crosstalk. These crosstalks
would disturb the directional perception in 3D sound reproduction since it would
change the spectrum, conveying the direction perception cues of the audio signals. In
order to eliminate the crosstalk, the crosstalk cancellation should be introduced.
2.3.1 Problem Formulation
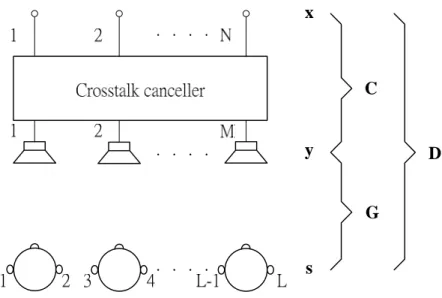
The algebraic structure of transaural stereo will be developed with the aid of Figure 2.3. In that figure, N program signals x x1, 2, ,x are to be used to create M N
loudspeaker signals y y1, 2, ,y , which in turn result in L ear signals M s s1, 2, ,s . L
Let these three sets of signals be represented by the vectors
[
1 2]
T N x x x = x (2.1)[
1 2]
T M y y y = y (2.2)[
1 2]
T L s s s = s (2.3)where T denotes matrix transposition. Next, define three matrices of transfer functions. First let G be an L M× matrix, the acoustic matrix, such that element g is the ij
transfer function to the ith ear from the jth speaker. Similarly, let C be an M×N
C D s y x G
crosstalk canceller from jth input to the ith output of the network, and let D be the
L N× matrix of desired transfer functions describing the overall transfer of signal
from the inputs of the crosstalk canceller to the ears, for which d is the transfer ij
function to the ith ear from the jth crosstalk canceller input. With this notation in place,
the acoustic propagation can be written as the matrix form =
s Gy , (2.4)
the action of the crosstalk canceller can be written =
y Cx , (2.5)
and the desired transfer of signals is
=
s Dx. (2.6)
From these, a solution is found by solving
=
GC D (2.7)
for C. In this thesis, where N = 2, M = 2, 3, 4 and L = 2 so that G is a 2 M× matrix,
C is an M× and GC results in a 2 22 × desired transfer matrix D. In order to
deliver the binaural signals to listener precisely so that D must be an identity matrix. Thus, we will find the crosstalk canceller by solving G2 M× CM 2× =I2 2× in chapter 3.
Chapter 3
Crosstalk cancellers
To achieve good reproduction of 3D audio it is necessary to precisely control the
acoustic signals at the listener’s ear. The simplest way to do this is to deliver binaural
signals through headphones. However, in many applications, e.g., home entertainment
environment, spatialized video-conferencing, it is preferable that the listener is not
required to wear headphones. If loudspeakers are used to deliver binaural signals, the
crosstalk signal that arrives at each ear from the other loudspeakers must be canceled.
This is achieved by pre-filtering binaural signals before send to loudspeakers and is
shown in Figure 3. 1.
In this chapter, we will discuss difference structures of crosstalk canceller of three
loudspeakers arrangement. In addition, economical realizations, less computations
1 h h2 h3 h4 1 g 2 g
3.1 Conventional Two Loudspeakers Arrangement
First, we consider the typical crosstalk canceller. Assume a symmetrical case here.
This case has two channels, two loudspeakers, and two ears, as shown in Figure 3.1. The acoustic transfer function matrix G
( )
Z is( )
1( )
( )
2( )
( )
2 1 g z g z z g z g z ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ G . (3.1)In order to reproduce the binaural signal at each ear, C
( )
z must be the inverse of the acoustic transfer function matrix G( )
z , so that( )
( )
( )
1( )
( )
2( )
( )
2 2 2 1 1 2 1 g z g z z g z g z g z g z − ⎡ ⎤ = ⎢ ⎥ − − ⎣ ⎦ C (3.2)From Eq. (3.2), it requires four filters to realize crosstalk cancellation which has
heavy computation load. However, some simplification is possible in implementation. In 1989, Cooper and Bauck proposed shuffler structure which C
( )
z can be factored by the standard diagonalization technique of finding its eigenvectors and eigenvalues.This results in the shuffler form.
( )
(
( )
( )
)
( )
( )
(
)
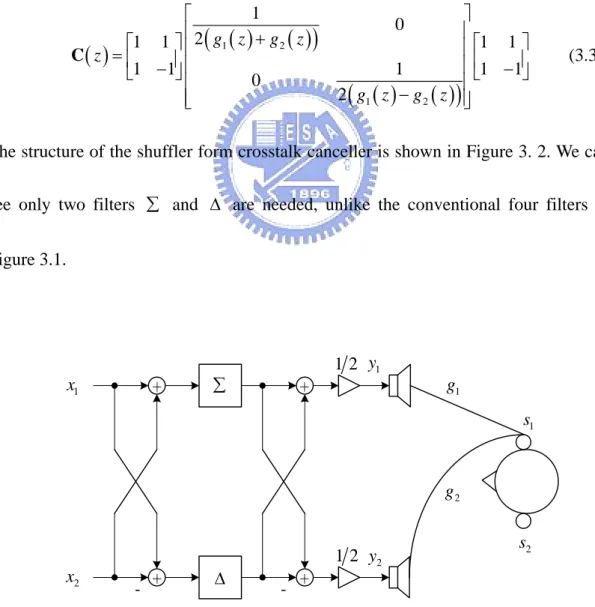
1 2 1 2 1 0 2 1 1 1 1 1 1 1 1 1 0 2 g z g z z g z g z ⎡ ⎤ ⎢ + ⎥ ⎡ ⎤⎢ ⎥⎡ ⎤ = ⎢ − ⎥⎢ ⎥⎢ − ⎥ ⎣ ⎦⎢ ⎥⎣ ⎦ − ⎢ ⎥ ⎣ ⎦ C (3.3)The structure of the shuffler form crosstalk canceller is shown in Figure 3. 2. We can
see only two filters ∑ and Δ are needed, unlike the conventional four filters in
Figure 3.1. ∑ Δ 1 x 2 x 2 y 1 y 1 2 1 2 1 g 2 g 1 s 2 s
In our approach, we adopt the FIR filter and use the least square error method to
find out the finite impulse responses of the filters in Eq. (3.3). Let
( )
( )
( )
1 2 1 z g z g z ∑ = + (3.4) and( )
( )
( )
1 2 1 z g z g z Δ = − (3.5)then we can obtain two equation as follows:
( ) ( )
z g z1( ) ( )
z g2 z d z1( )
∑ ⋅ +∑ ⋅ = (3.6)
( ) ( )
z g z1( ) ( )
z g2 z d2( )
zΔ ⋅ − Δ ⋅ = (3.7)
where d z1
( )
and d2( )
z are the signal that we want to approximate . In the matrix form, these two equations can be expressed as follows:⋅ = G c D (3.8) 1 2 0 0 ∑ Δ ⎡ ⎤⎡ ⎤ ⎡ ⎤ = ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ 1 2 G d G d (3.9)
where G and 1 G represent the convolution matrices of 2 g n1
[ ]
+g n2[ ]
and[ ]
[ ]
1 2
g n −g n , respectively. The vector ∑=
{
∑[ ] [ ]
0 ∑ 1 ∑[
J−1]
}
and[ ] [ ]
[
]
{
Δ 0 Δ 1 Δ J 1}
Δ = − represent the inverse FIR filters with J taps. The
desired response di =
{
di[ ]
0 di[ ]
1 d Ki[
+ −J 2]
}
={
1 0 0}
for i =1, 2 represents the impulse response in time domain, where K is the number of taps of thetransfer functions.
K+J-2 such that the following square error as small as possible.
2 2
e = D G c− ⋅ (3.10) The least square error solution can be shown as
(
T)
⋅ = TG G c G D (3.11)
(
T)
−1 T=
c G G G D (3.12) Hence, the FIR filter would be
[ ] [ ]
[
]
{
c 0 c 1 c J 1}
∑= − (3.13)[ ] [
]
[
]
{
c J c J 1 c 2J 1}
= Δ + − (3.14)It should be mentioned that the desired signal can not be the pure impulse. It
requires an extra delay to decrease the least square error while approximating the
desired signal. The extra delay we choice is typically the half of the inverse FIR filter
order.
3.2 Three Loudspeakers Setup
Next, we look at the situation depicted in Figure 3.3, a symmetrical arrangement of
three loudspeakers and one listener. We have
( )
1( )
( )
3( )
( )
2( )
( )
2 3 1 g z g z g z z g z g z g z ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ G (3.15)It should be mentioned that the solution of crosstalk canceller is not unique. Since
infinite number of solutions of C zi
( )
. In the following sections, we will discuss some possible solutions of crosstalk canceller of three loudspeakers geometric andillustrate how to find the crosstalk canceller.
1 g 2 g g3 × 3 2 C
3.2.1 Direct Forward Type
This structure has proposed by Cooper and Bauck in [10]. In order to reproduce the binaural signal at both ear accurately, the general solution is that C
( )
z must be the pseudoinverse of G( )
z as shown below( )
H( ) ( )
(
H( )
)
1z z z z −
+ =
G G G G (3.16)
hence, the crosstalk canceller C
( )
z is( )
z = +( )
zC G (3.17) Figure 3.3 Geometry and transfer functions for three loudspeakers.
( )
( )
( )
( )
( )
( )
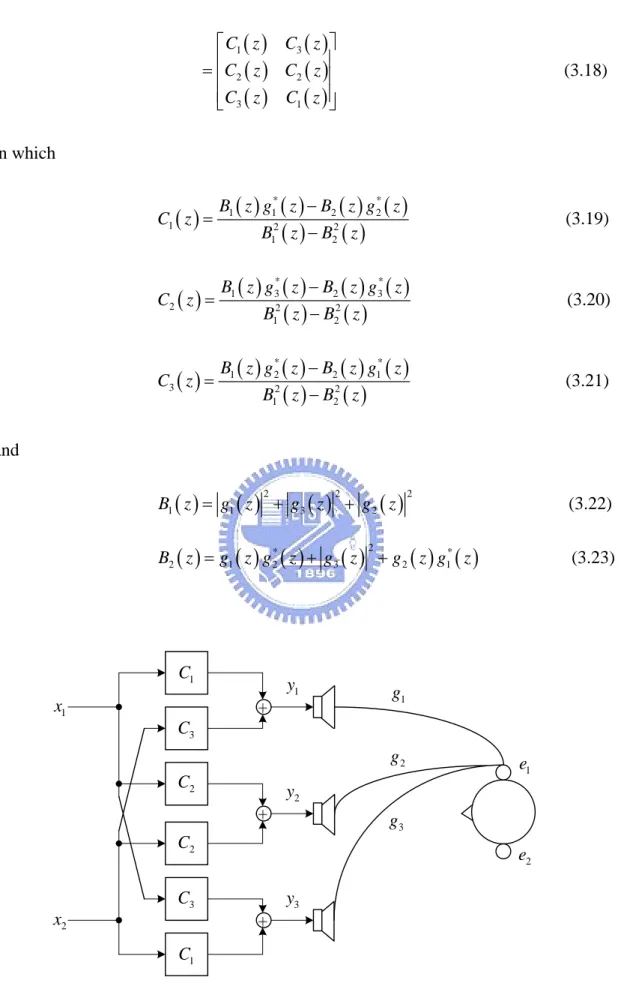
1 3 2 2 3 1 C z C z C z C z C z C z ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ (3.18) in which( )
1( ) ( )
1*( )
2( ) ( )
( )
*2 1 2 2 1 2 B z g z B z g z C z B z B z − = − (3.19)( )
1( ) ( )
3*( )
2( ) ( )
( )
*3 2 2 2 1 2 B z g z B z g z C z B z B z − = − (3.20)( )
1( ) ( )
*2( )
2( ) ( )
( )
1* 3 2 2 1 2 B z g z B z g z C z B z B z − = − (3.21) and( )
( )
2( )
2( )
2 1 1 3 2 B z = g z + g z + g z (3.22)( )
( ) ( )
*( )
2( ) ( )
* 2 1 2 3 2 1 B z =g z g z + g z +g z g z (3.23) . 1 y 2 y 3 y 1 x 2 x 1 e 2 e 1 g 2 g 3 g 1 C 1 C 2 C 2 C 3 C 3 CThe structure of the direct forward type crosstalk canceller is shown in Figure 3. 4. To perform these filters directly causes C zi
( )
unstable due to the denominator of( )
i
C z has non-minimum phase. Thus, in order to avoid the stability problem we can
find these filters by using the least square method
3.2.2 Least Square Forward Type
In order to overcome the problem of stability, we can find the crosstalk cancellation
filters by using the least square method. The structure of this type crosstalk canceller is same as Figure 3. 4. Our goal is that C
( )
z multiplied by G( )
z equals an identity matrix I2 2× with some extra delay. Since symmetric arrangement, the four equations need to solve become two equations as shown below( ) ( )
( ) ( )
( ) ( )
( )
1 1 3 2 2 3 g z C z +g z C z +g z C z =d z (3.24)( ) ( )
( ) ( )
( ) ( )
2 1 3 2 1 3 0 g z C z +g z C z +g z C z = (3.25)In the matrix form:
= s Gc D (3.26) 1 2 ⎡ ⎤ ⎡ ⎤⎢ ⎥ =⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ 1 3 2 2 3 1 3 c G G G d c G G G 0 c (3.27)
where G1, G2 and G3 represent the convolution matrices of g n1
[ ]
, g n2[ ]
and[ ]
3
The desired response d=
{
0 0 1 0}
represents the impulse responsewith K+J-1 taps and J 2 modeling delay in time domain. 0 represents the zero
vector with K+J-1 taps. Thus, the least square error solution can be obtained by Eq.
(3.11) and Eq. (3.12) then the FIR filter would be
[ ] [ ]
[
]
{
c 0 c 1 c J 1}
= − 1 c (3.28)[ ] [
]
[
]
{
c J c J 1 c 2J 1}
= + − 2 c (3.29)[ ] [
]
[
]
{
}
3 = c 2J c 2J +1 c 3J −1 c (3.30)This type crosstalk canceller requires six FIR filters and causes complex calculation. In the next section, we will focus on factoring the crosstalk canceller matrix C
( )
z so that economical realizations are possible.3.2.3 Shuffler Structure
This structure has proposed by Cooper and Bauck in [10]. Eq. (3.18) is useful in
showing that six filters are required, but of the six there are only three specifications.
Noticing that if we ignore the middle row of Eq. (3.18), the remaining elements have
the same symmetric form as Eq. (3.2), and we can benefit from the factorization of Eq.
(3.3). With this aid, we can write the factorization of Eq. (3.18) by inspection,
( )
( )
( )
( )
( )
( )
1 3 2 1 3 0 1 0 1 2 1 1 0 1 0 0 1 1 1 0 1 0 2 C z C z z C z C z C z + ⎡ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ =⎢ ⎥⎢ ⎥ ⎢ ⎥ − ⎣ ⎦ ⎢ ⎥ ⎢ − ⎥ − ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ C (3.31)( )
( )
( )
2 2 2 0 1 0 1 2 1 1 0 1 0 0 1 1 1 0 1 0 2 z C z z ∑ ⎡ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ =⎢ ⎥⎢ ⎥ ⎢ ⎥ − ⎣ ⎦ ⎢ ⎥ ⎢ − ⎥ Δ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ (3.32)The shuffler topology of three loudspeakers setup is shown in Figure 3. 5. It can be shown that of the three loudspeaker signals y , 1 y and 2 y , 3 y and 1 y are 3
created from the symmetric combination of x and 1 x , one signal can be found from 2
the other by replacing x by 1 x and vice versa. In addition, 2 y is formed of only a 2
filtered x1+ signal. If x2 G
( )
z are real-valued, then( )
( )
( )
( )
( )
(
)
( )
1 2 2 2 2 1 2 2 3 g z g z z g z g z g z + ∑ = + + (3.33)( )
( )
( )
( )
(
)
( )
3 2 2 2 1 2 2 3 g z C z g z g z g z = + + (3.34)( )
( )
( )
2 1 2 1 z g z g z Δ = − (3.35)Note that these filters become identical to the corresponding filters of crosstalk canceller of Eq. (3.3) when g3
( )
z =0. The impulse response of these filters are shown in Figure 3.6, Figure 3.7 and Figure 3.8.1 y 2 y 3 y 1 x 2 x 1/ 2 1/ 2 2 C 1 g 2 g 3 g s1 2 s 2 ∑ 2 Δ 0 20 40 60 80 100 120 140 160 180 200 -3 -2 -1 0 1 2 3 4x 10 -4 Samples M a gni tud e Sum 2(z)
Figure 3.5 The shuffler topology of three loudspeakers geometric (Cooper and Bauck in 1996).
0 20 40 60 80 100 120 140 160 180 200 -4 -3 -2 -1 0 1 2 3 4x 10 -4 Samples M a gni tud e C 2(z) 0 20 40 60 80 100 120 140 160 180 200 -6 -4 -2 0 2 4 6x 10 -4 Samples M a gni tud e Delta 2(z)
Figure 3.7 The impulse response of the filterC . 2
3.2.4 A Simplified Shuffler Form
As described above, the direct forward type requires six filters to realize crosstalk
cancellation and has heavy computation. Although the shuffler structure requires
fewer filters than direct implementation, the crosstalk cancellation filters of such
structure are not easy to realize. In this section, we derive one possible solution of
crosstalk canceller, that is, a simplified shuffler form, in which only two filters are
needed to realize crosstalk cancellation. In addition, the crosstalk cancellation filters
of this structure are easier to implement than those in shuffler form.
Now, we illustrate how to find C. Ideally, G2×3C3×2 =I2 2× . Since symmetric arrangement so that G2×3C3×2 results in two equations as follows:
( ) ( )
( ) ( )
( ) ( )
1 1 2 3 3 2 1 C z g z +C z g z +C z g z = (3.36)( ) ( )
( ) ( )
( ) ( )
1 2 2 3 3 1 0 C z g z +C z g z +C z g z = (3.37)From Eq. (3.36) and Eq. (3.37), there are three variables to be solved by two equations so that there exist infinite solutions of C zi
( )
. The C zi( )
we find here is one possible solution. First, by subtracting and adding Eq. (3.36) and Eq. (3.37), wehave
( )
( )
( )
( )
1 3 1 2 1 C z C z g z g z − = − (3.38)( )
( )
(
C z1 +C3 z)
(
g z1( )
+g2( )
z)
+2C2( ) ( )
z g3 z =1 (3.39)( )
( )
2 3 1 2 C z g z = (3.40) In addition, g1( )
z +g2( )
z ≠0 so that( )
( )
1 3 0 C z +C z = (3.41)From Eq. (3.38) and Eq. (3.41), we can obtain:
( )
(
( )
( )
)
1 1 2 1 2 C z g z g z = − (3.42)( )
(
( )
( )
)
3 1 2 1 2 C z g z g z − = − (3.43) Thus, one possible solution of crosstalk canceller can be:( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
1 2 1 2 3 3 1 2 1 2 1 1 1 1 1 2 1 1 g z g z g z g z z g z g z g z g z g z g z ⎡ − ⎤ ⎢ − − ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ − − ⎢ ⎥ ⎣ ⎦ C (3.44)Also, we can utilize the factorization as described in section 3.2.3. If we ignore the
middle row of Eq. (3.44), the remaining elements have the same symmetric form as
Eq. (3.2), then we can benefit from the factorization of Eq. (3.3) and we can write the
factorization of Eq. (3.44) by reinserting the middle row as shown below
( )
( )
( )
( )
3 1 2 0 0 1 0 1 1 1 1 1 0 1 0 0 1 1 2 1 0 1 1 0 z g z g z g z ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥⎢ ⎥ ⎢ ⎥ − ⎢ ⎥ ⎣ ⎦ ⎢ − ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ − ⎢ ⎥ ⎣ ⎦ C (3.45)( )
( )
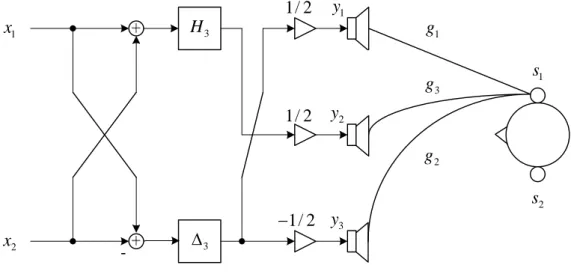
3 3 0 1 0 1 1 1 1 0 0 1 1 2 0 1 H z z ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥⎢ ⎥ ⎢ ⎥ Δ ⎣ − ⎦ ⎣ ⎦ ⎢ − ⎥ ⎣ ⎦ (3.46)The structure of this type crosstalk canceller is shown in Figure 3. 9 and the impulse
response of these filters are shown in Figure 3.10 and Figure 3.11. Obviously, this
structure is easier to implement than direct forward type and shuffler form. In addition,
it requires only two filters so that economical realization and less computation can be
achievable.
It should be mentioned that only the sum signal x1+ is fed to the center x2
loudspeaker, and only the difference signal ±
(
x1−x2)
is fed to the side loudspeakers. One side gets the same signal as the other side loudspeaker, but inverted in sign.Feeding the side loudspeakers with opposite sign signals is similar to a dipole,
especially when the side loudspeakers are placed close together as described in [17].
1 y 2 y 3 y 1 x 2 x 1/ 2 1/ 2 1/ 2 − 3 Δ 1 g 3 g 2 g 1 s 2 s 3 H
Figure 3.9 The simplified shuffler structure of crosstalk canceller for three loudspeakers arrangement.
0 20 40 60 80 100 120 140 160 180 200 -5 -4 -3 -2 -1 0 1 2 3 4 5x 10 -4 Samples M a gni tud e Time domain H3(z) 0 20 40 60 80 100 120 140 160 180 200 -6 -4 -2 0 2 4 6x 10 -4 Samples M a gni tud e Time domain Delta 3(z)
Figure 3.10 The impulse response of the filterH . 3
3.2.5 A Simplified Shuffler Form of Four Loudspeakers
Arrangement
Similarly, we can extend to four loudspeakers and derive the simplified shuffler
form. In this case, we deliver the binaural signals to listener via four loudspeakers as
shown in Figure 3.12. Under symmetric arrangement, the acoustic matrix G is a 2 4×
matrix and the crosstalk canceller matrix C is a 4 2× matrix as shown below
( )
1( )
( )
2( )
( )
3( )
( )
4( )
( )
4 3 2 1 g z g z g z g z z g z g z g z g z ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ G (3.53)( )
( )
( )
( )
( )
( )
( )
( )
( )
1 4 2 3 3 2 4 1 C z C z C z C z z C z C z C z C z ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ C (3.54) 4×2 C 1 g g2 g3 g4In addition, our desired transfer function matrix D is a 2 2× identity matrix. Thus,
we can obtain two equations as follows
( ) ( )
( ) ( )
( ) ( )
( ) ( )
1 1 2 2 3 3 4 4 1 C z g z +C z g z +C z g z +C z g z = (3.55)( ) ( )
( ) ( )
( ) ( )
( ) ( )
1 4 2 3 3 2 4 1 0 C z g z +C z g z +C z g z +C z g z = (3.56)By subtracting and adding Eq. (3.55) and Eq. (3.56), we have
( )
( )
(
)
(
( )
( )
)
(
( )
( )
)
(
( )
( )
)
( )
( )
(
)
(
( )
( )
)
(
( )
( )
)
(
( )
( )
)
1 4 1 4 2 3 2 3 1 4 1 4 2 3 2 3 1 1 g z g z C z C z g z g z C z C z g z g z C z C z g z g z C z C z ⎧ − − + − − = ⎪ ⎨ + + + + + = ⎪⎩ (3.57)Next, we choose C2
( )
z =C3( )
z and C2( )
z +C3( )
z =1(
g2( )
z +g3( )
z)
so that( )
( )
(
)
(
( )
( )
)
( )
( )
(
)
(
( )
( )
)
1 4 1 4 1 4 1 4 1 0 g z g z C z C z g z g z C z C z ⎧ − − = ⎪ ⎨ + + = ⎪⎩ (3.58)We can further obtain
( )
( )
( )
( )
1 4 1 4 1 1 2 C z C z g z g z = − = − (3.59) and( )
( )
( )
( )
2 3 2 3 1 1 2 C z C z g z g z = = + (3.60)then one possible solution of crosstalk canceller can be
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
1 4 1 4 2 3 2 3 2 3 2 3 1 4 1 4 1 1 1 1 1 1 1 2 1 1 g z g z g z g z g z g z g z g z z g z g z g z g z g z g z g z g z − ⎡ ⎤ ⎢ − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + + ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ + + ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ − − ⎢ ⎥ ⎣ ⎦ C (3.61)( )
(
( )
( )
)
( )
( )
(
)
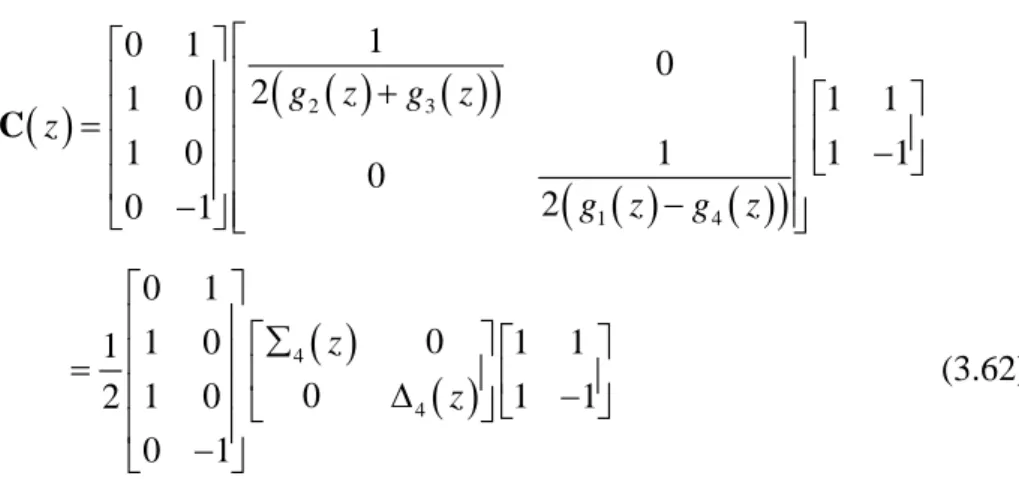
2 3 1 4 1 0 1 0 2 1 0 1 1 1 0 1 1 1 0 2 0 1 g z g z z g z g z ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ + ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎣ − ⎦ ⎢ ⎥ ⎢ ⎥ − − ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ C( )
( )
4 4 0 1 0 1 0 1 1 1 0 1 0 1 1 2 0 1 z z ⎡ ⎤ ⎢ ⎥ ∑⎡ ⎤ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ Δ ⎦⎣ − ⎦ ⎢ − ⎥ ⎣ ⎦ (3.62)The structure of this type crosstalk canceller is shown in Figure 3.13. Same as the
simplified shuffler form of three loudspeakers setup, it requires only the inversed-sum filter ∑4
( )
z and the inversed-difference filter Δ4( )
z to realize the crosstalk canceller.It should be mentioned that the approach we propose here is only one possible
solution. There must be lots of different implementation of crosstalk canceller for four
loudspeakers arrangement. 1 y 2 y 3 y 1 x 2 x 4 y 1 g 2 g 3 g 4 g 4 ∑ 4 Δ 1 s 2 s 1 2 1 2 1 2 1 2 −
Figure 3.13 The simplified shuffler structure of crosstalk canceller for four loudspeakers arrangement.
3.2.6 Reduced-Order Modeling
In order to efficiently reduce the orders of the model, we use pole-zero models to
approximate the impulse response of FIR filters. Here, we use Prony appoximation
method to model. Either model can be expressed by the system function:
( )
( )
( )
0( )
( )
1 1 q k q k q p k p k p B z b k z C z A z a k z − = − = ∑ = = + ∑ (3.63)The Prony approximation wants to minimize the error:
( )
p( ) ( )
q( )
E z =A z x z −B z (3.64)
where x z
( )
is the system’s impulse response that we want to model. Since( )
0q
b n = for n> , we may write the error explicitly for each n as follows: q
( )
[ ]
[ ]
1[ ] [
[ ] [
]
]
[ ]
1 ; 0,1, , ; p l p q p l p x n a l x n l b n n q e n x n a l x n l n q = = ⎧ + ∑ − − = ⎪ = ⎨ + ∑ − > ⎪⎩ … (3.65)Prony approximation begins by finding the coefficients ap
( )
k that minimize thesquare error
[ ]
2[ ]
[ ] [
]
2 1 1 1 p prony p n q n q l e e n x n a l x n l ∞ ∞ = + = + = =∑
=∑
+∑
− (3.66)Form this equation, we know the modeled impulse response ˆx n
[ ]
approximates[ ]
x n without error over the interval
[ ]
0, q . However, there is modeling errorbetween x n
[ ]
and ˆx n[ ]
. We will discuss how the modeling error affects theChapter 4
Perturbation Analysis
The main disadvantage of crosstalk canceller system is that it is critically dependent
on the listener’s head being in a fixed design position, the so called “sweet-spot”.
Many studies have shown that the lateral movement away from the design position of
as little as a few centimeters results in loss of the 3D audio effect. In this chapter, we
will discuss the robustness of two and three loudspeakers arrangement. The analysis
of shuffler form and simplified shuffler form are our main focus here.
In addition, we will focus on the performances of crosstalk suppression, and see
how perturbations or modeling errors of these inverse filters will affect the crosstalk
suppression in the crosstalk canceller. In the following section, we will discuss which
4.1 Perturbation Analysis for Filter Modeling
First, we will investigate the robustness of crosstalk canceller due to filter modeling
error as shown in Figure 4.1. Ideally, the product of C and 0 G results in an
identity matrix. After modeling, C becomes 0 C which means there are modeling +
errors inC . Hence, the product of + C and + G is no longer an identity matrix, since the modeling error affects the performance of equalization and crosstalk cancellation.
In this section, we will analyze how the modeling errors affect the performance of two
and three loudspeakers shuffler forms and simplified shuffler form, since their
structures are similar.
0 C e x + ⇒ C y G
Figure 4.1 The geometry of crosstalk cancellation system for multiple loudspeakers after filter modeling
4.1.1 Analysis on Shuffler Form of Two Loudspeakers Setup
From Figure 3.2, we can derive the relation between Y and X in a matrix form.
1 1 2 2 1 2 Y X Y X ∑ +Δ ∑ −Δ ⎡ ⎤ ⎡ ⎤⎡ ⎤ = ⎢ ⎥ ⎢∑ −Δ ∑ +Δ⎥⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (4.1)
After modeling, the filters ∑ and Δ will be changed to be ∑ and + Δ with +
modeling error e and s,1 ed,1, respectively, so that the relation between Y+ and X can be written as follows: ,1 1 ,2 2 1 2 Y X Y X + + + + + + + + + + ∑ +Δ ∑ −Δ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ = ⎢ ⎥ ⎢∑ −Δ ∑ +Δ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ,1 ,1 ,1 ,1 1 ,1 ,1 ,1 ,1 2 1 2 s d s d s d s d e e e e X e e e e X ∑ + + Δ + ∑ + − Δ − ⎡ ⎤ ⎡ ⎤ = ⎢∑ + − Δ − ∑ + + Δ + ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (4.2)
where Y+,1 and Y+,2 represent the perturbed signals sent to the loudspeaker pair. The modeling errors after crosstalk cancellation can be expressed as follows:
,1 ,1 ,1 ,1 1 2, ,1 ,1 ,1 ,1 2 1 2 s d s d Shuffler s d s d e e e e g E e e e e g + − ⎡ ⎤ ⎡ ⎤ = ⎢ − + ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (4.3)
Now, we begin the analysis. First, we factorize the filters ∑ and Δ as shown
below 1 2 1 1 1 1 1 g g g F ∑ = = ⋅ + + (4.4) 1 2 1 1 1 1 1 g g g F Δ = = ⋅ − − (4.5) In Eq. (4.4) and Eq. (4.5), we let
2 1 g F g = (4.6)
1 x 2 x 2 y 1 y 1 2 1 2 1 g 2 g 1 s 2 s 1 1 F+ 1 1 F− 1 1 g 1 1 g
Thus, we can obtain the structure as shown in Figure 4.2. It should be mentioned that
we focus on the perturbation of F due to filter modeling so that we assume there are no modeling errors in 1 g . By utilizing Taylor series, we have 1
( )
1 1 1 1 n n F g ∞ = ⎡ ⎤ ∑ = ⋅ +⎢ − ⎥ ⎣∑
⎦ (4.7) 1 1 1 1 n n F g ∞ = ⎡ ⎤ Δ = ⋅ +⎢ ⎥ ⎣∑
⎦ (4.8) After low order filter design, F becomes F+ with filter modeling error e, i.e.e=F+− (4.9) F Therefore, we have 1 1 1 1 g F + + ∑ = ⋅ +
(
) (
) (
2)
3 1 1 1 F e F e F e g ⎡ ⎤ = ⋅ −⎣ + + + − + + ⎦( ) (
)
1 1 1 1 1 n n n F e g ∞ = ⎡ ⎤ = ⋅ +⎢ − + ⎥ ⎣∑
⎦ (4.10)Using binomial series, we can obtain
( )
1 0 1 1 1 1 n n k n k n k n e F k g ∞ − + = = ⎡ ⎛ ⎞ ⎤ ∑ = ⋅ +⎢ − ⎜ ⎟ ⎥ ⎝ ⎠ ⎣∑
∑
⎦( )
( )
1 1 1 1 1 1 1 n n n k n k n n k n F e F k g ∞ ∞ − = = = ⎡ ⎛ ⎞ ⎤ = ⋅ +⎢ − + − ⎜ ⎟ ⎥ ⎝ ⎠ ⎣∑
∑∑
⎦ (4.11) Similarly, 1 1 1 1 g F + + Δ = ⋅ − 1 1 1 1 1 1 n n k n k n n k n F e F k g ∞ ∞ − = = = ⎡ ⎛ ⎞ ⎤ = ⋅ +⎢ + ⎜ ⎟ ⎥ ⎝ ⎠ ⎣∑
∑∑
⎦ (4.12) We then have ,1 s e = ∑ − ∑ +( )
1 1 1 1 1 n n k n k n k n e F k g ∞ − = = ⎛ ⎞ = ⋅ − ⎜ ⎟ ⎝ ⎠∑∑
(
2 2 2 3)
1 1 2 3 3 e eF e eF e F e g = ⋅ − + + − + − + (4.13) Assume(
2eF−e)
(
e2−3eF2+3e F2 − +e3)
so that(
)
,1 1 1 2 1 s e F e g ≅ ⋅ − (4.14) and ,1 d e = Δ − Δ + 1 1 1 1 n k n k n k n e F k g ∞ − = = ⎛ ⎞ = ⋅ ⎜ ⎟ ⎝ ⎠∑∑
(
2 2 2 3)
1 1 2 3 3 e eF e eF e F e g = ⋅ + + + + + + (4.15)(
)
,1 1 1 2 1 d e F e g ≅ ⋅ + (4.16) Thus, the modeling error vector can be written as follows1 2, 2 1 2 1 2 Shuffler g Fe e E g e Fe g − ⎡ ⎤ ⎡ ⎤ ≅ ⎢ ⎥⎢ ⎥ − ⎣ ⎦ ⎣ ⎦ (4.17)
To further simplify this analysis, we will assume vectors are reduced to scalars,
1 1
g = and g2 = to account for interaural intensity difference. Hence, F rr = and
the error vector can be rewritten as
2, 2 1 2 Shuffler re e E e re r − ⎡ ⎤ ⎡ ⎤ ≅ ⎢− ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦
(
2)
2 1 er e r ⎡ ⎤ = ⎢ ⎥ − ⎢ ⎥ ⎣ ⎦ (4.18) The first element of this error vector indicates the error of equalization part and thesecond element represents the error of crosstalk part due to the filter modeling. In [20],
the author has investigated the perturbation analysis on direct forward type 2. The
error vector can be derived as
2 2 0 1 1 0 1 e E e r r ⎡ ⎤ ⎡ ⎤ = ⎢ ⎥ ⎢ ⎥ − ⎣ ⎦ ⎣ ⎦ 1 2 1 er e r ⎡ ⎤ = ⎢ ⎥ − ⎣ ⎦ (4.19) It is difficult to compare which structure has better immunity of the perturbation. We
4.1.2 Analysis on Shuffler Form of Three Loudspeakers
Arrangement
Also, we take the same analysis on shuffler form of three loudspeakers arrangement
and derive the modeling error vector for comparison. In the same way, we derive the
relation between Y and X in the shuffler form crosstalk canceller of three loudspeakers
arrangement as follows:
(
)
(
)
(
)
(
)
2 2 2 2 1 1 2 2 2 2 3 2 2 2 2 1 1 2 2 1 1 2 2 Y X Y C C X Y ⎡ ∑ +Δ ∑ −Δ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ∑ −Δ ∑ +Δ ⎥ ⎣ ⎦ (4.20)After modeling, the filters ∑ , 2 C and 2 Δ will be changed to be 2 ∑ , +,2 C+,2 and
,2 +
Δ with modeling error es,2 , ec,2 anded,2, respectively, so that the relation
between Y+ and X can be written as follows:
(
) (
)
(
) (
)
,2 ,2 ,2 ,2 ,1 1 ,2 ,2 ,2 2 ,3 ,2 ,2 ,2 ,2 1 1 2 2 1 1 2 2 Y X Y C C X Y + + + + + + + + + + + + + ⎡ ∑ +Δ ∑ −Δ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ∑ −Δ ∑ +Δ ⎥ ⎣ ⎦(
) (
)
(
) (
)
2 ,2 2 ,2 2 ,2 2 ,2 1 2 ,2 2 ,2 2 2 ,2 2 ,2 2 ,2 2 ,2 1 1 2 2 1 1 2 2 s d s d c c s d s d e e e e X C e C e X e e e e ⎡ ∑ + + Δ + ∑ + − Δ − ⎤ ⎢ ⎥ ⎢ ⎥ ⎡ ⎤ =⎢ + + ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ∑ + − Δ − ∑ + + Δ + ⎢ ⎥ ⎣ ⎦ (4.21)whereY+,1, Y+,2 and Y+,3 represent the perturbed signals sent to the loudspeakers. Then the modeling error after crosstalk cancellation can be expressed as follows:
1 y 2 y 3 y 1 x 2 x 1/ 2 1/ 2 1 g 2 g 3 g s1 2 s 1 1 F+ 1 1 F+ 1 1 F− 1 1 g 1 1 g 1 1 g 1 H 2 H
(
)
(
)
(
)
(
)
1 ,2 ,2 ,2 ,2 ,2 3, 3 ,2 ,2 ,2 ,2 ,2 2 1 1 2 2 1 1 2 2 s d c s d shuffler s d c s d g e e e e e E g e e e e e g ⎡ + − ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ (4.22)Now, we begin the analysis. First, we factorize the filters ∑ , 2 C and 2 Δ as 2
follows:
(
1)
2 2 2 2 2 1 1 2 3 3 1 2 1 1 1 1 2 1 2 g g g F g g g g g g + ∑ = = ⋅ ⋅ + + + ⎛ ⎞ + ⎜ + ⎟ ⎝ ⎠ (4.23)(
)
(
)
(
)
1 2 3 3 2 2 2 2 2 1 1 2 3 1 2 3 1 1 1 2 2 g g g g C g F g g g g g g + = = ⋅ ⋅ + + + + + (4.24) 2 1 2 1 1 1 1 1 g g g F Δ = = ⋅ − − (4.25) where F is described in section 4.1.1. Thus, we can obtain the structure as shown in Figure 4.3. The filters H and 1 H in Figure 4.3 are shown below 2(
)
(
)
1 2 3 1 2 1 2 3 2 2 2 1 2 3 1 1 2 2 H g g g g g g H g g g ⎧ = ⎪ ⎛ ⎞ ⎪ + ⎜ ⎟ ⎪ + ⎝ ⎠ ⎨ ⎪ + ⎪ = ⎪ + + ⎩ (4.26)By utilizing Taylor series, we have
( )
2 2 1 1 3 1 2 1 1 1 1 2 n n F g g g g ∞ = ⎡ ⎤ ∑ = ⋅ ⋅ +⎢ − ⎥ ⎣ ⎦ ⎛ ⎞ + ⎜ + ⎟ ⎝ ⎠∑
(4.27)(
)
(
)
( )
1 2 3 2 2 2 1 1 1 2 3 1 1 2 n n g g g C F g g g g ∞ = + ⎡ ⎤ = ⋅ ⋅ +⎢ − ⎥ + + ⎣∑
⎦ (4.28) 2 1 1 1 1 n n F g ∞ = ⎡ ⎤ Δ = ⋅ +⎢ ⎥ ⎣∑
⎦ (4.29) After low order filter design, F becomes F+ with filter modeling error e as described in Eq. (4.9) so that we have,2 2 1 3 1 2 1 1 1 1 1 2 g g F g g + + ∑ = ⋅ ⋅ + ⎛ ⎞ + ⎜ + ⎟ ⎝ ⎠
(
) (
) (
2)
3 2 1 3 1 2 1 1 1 1 2 F e F e F e g g g g ⎡ ⎤ = ⋅ ⋅ −⎣ + + + − + + ⎦ ⎛ ⎞ + ⎜ + ⎟ ⎝ ⎠( ) (
)
2 1 1 3 1 2 1 1 1 1 1 2 n n n F e g g g g ∞ = ⎡ ⎤ = ⋅ ⋅ +⎢ − + ⎥ ⎣ ⎦ ⎛ ⎞ + ⎜ + ⎟ ⎝ ⎠∑
(4.30)Using binomial series, we can obtain