行政院國家科學委員會專題研究計畫 期中進度報告
即時交通資訊攫取技術與融合演算(2/3)
計畫類別: 個別型計畫 計畫編號: NSC92-2211-E-002-079- 執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立臺灣大學土木工程學系暨研究所 計畫主持人: 張堂賢 計畫參與人員: 許聿廷、賈毓虎 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 93 年 5 月 26 日
□ 成 果 報 告
行政院國家科學委員會補助專題研究計畫
■期中進度報告
即時交通資訊攫取技術與融合演算(II)
Real-Time Traffic Data Acquisitions and Fusion Techniques (II)
計畫類別:■ 個別型計畫 □整合型計畫
計畫編號:NSC91-2211-E002-082
執行期間:九十一年八月一日 至 九十四年七月三十一 日
計畫主持人:張堂賢 教授
共同主持人:
計畫參與人員:許聿廷、賈毓虎等
成果報告類型(依經費核定清單規定繳交):■精簡報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
■出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究
計畫、列管計畫及下列情形者外,得立即公開查詢
執行單位:國立臺灣大學土木工程學系暨研究所
中 華 民 國 九十三 年 五 月 二十六 日
摘要
為達到先進運輸管理系統之運作,本研究提出一即時交通資訊擷取系統, 規劃以計程車車隊支援探測車系統之主體,結合路側偵測系統,以對於都市地 區路網系統進行廣泛而完整之交通資訊擷取,並研擬系統運作下之資料庫系統 設計。根據此一資料系統架構之下,考量資料項目之取得,本研究分別建構「路 段旅行時間預測」和「動態旅次 OD 推估」之數學模式,並以廣義最小平方法 和推廣卡曼濾波器進行模式之演算,對於路網系統之車流狀態進行預測,藉以 支援相關動態交通控制、管理之決策。 在模式驗證部分,本研究係透過 Paramics 軟體模擬一般化棋盤型路網系統 下之交通車流,對路段旅行時間預測模式之預測結果進行分析,研究中主要藉 由準確度、強健性和穩定性三個面向評估模式之預測能力。預測結果顯示,經 由模式校估之過程並對於來源資料在演算前進行相關處理,可得到優良之預測 結果表現。對於動態旅次 OD 推估模式則是同樣根據模擬結果進行一試算流程, 將推估所得之旅次 OD 流量反應於路段流量上可得到良好之預測結果,是以評 估模式之推估結果為合理 根據預測誤差,探討探測車回傳資料之於整體車流之代表性在模式預測準 確度之影響,分析結果顯示,在車流中探測車佔有率達到 5%以上,本研究所提 出之路段旅行時間預測模式即可反應良好之預測能力。 關鍵字:交通資料擷取、探測車、路段平均旅行時間、動態旅次ODAbstract
In order to achieve advanced traffic management system (ATMS), This study proposes a real-time traffic data acquisition system. The framework of system has its basis of taxi fleets as probe vehicle system, and combines roadside detectors to collect traffic data from urban network extensively. According to the physical architectural, the study builds the mathematic models of “travel time prediction for road section” and “dynamic OD estimation”. The algorithms are based on generalized least squares (GLS) and extended Kalman filter (EKF) repectively. Through the prediction model, the system state of traffic flow is predicted to support decision-making of traffic control and management.
To verify the models, for travel time prediction for road section, this study analyzes the prediction results of grid network simulation from Paramics, and evaluates prediction ability by indices of precision, robustness and stability. It proves that well prediction results are obtained through calibration and data processing. For dynamic OD estimation, the study calculates traffic count prediction from estimated OD flows, which shows the mean error is within 10%. Therefore, it concludes the model is reasonable. Also, considering the represenstative of probe vehicles to traffic flow, the model has well prediction ability, when the penetration of probe vehicles is above 5%.
Key Words:Traffic Data Acquisitions, Probe Vehicle, Travel Time Prediction,
目錄
第一章 緒論... I 1.1 研究背景與動機... 1 1.2 研究目的與範圍... 2 1.3 研究方法... 3 1.4 研究內容與流程... 4 1.5 論文章節說明... 6 第二章 文獻回顧...8 2.1 探測車輛於交通資料擷取系統之應用與相關研究... 8 2.2 旅行時間預測方法... 10 2.3 動態旅次 OD 推估問題... 12 2.3.1 指派依據之動態旅次 OD 推估方法... 13 2.2.2 非指派依據之動態旅次 OD 推估方法... 16 第三章 方法論...19 3.1 最小平方法... 19 3.1.1 基本關係式... 19 3.2 卡爾曼濾波理論... 21 3.2.1 系統基本描述... 21 3.2.2 卡爾曼濾波器之求解... 24 3.2.3 推廣卡爾曼濾波器... 28 第四章 市區棋盤型路網環境下之交通資訊擷取系統 ...31 4.1 實體系統架構與路網環境... 31 4.2 即時交通資訊擷取系統... 32 4.2.1 主動交通資訊擷取... 32 4.2.2 被動交通資訊擷取... 35 4.3 資料庫系統與模式演算架構... 37 第五章 市區棋盤型路網環境下動態旅行時間預測與旅次 OD 推估模式之建 立...40 5.1 動態旅行時間預測模式... 40 5.2 動態旅次 OD 推估模式... 44 5.2.1 數學模式建構... 45 5.2.2 系統演算流程... 48第六章 模式驗證與數值分析...52 6.1 模擬資料背景說明... 52 6.1.1 Paramics V4.0 基本介紹 ... 53 6.1.2 路網與車流資料設定... 54 6.2 動態路段旅行時間預測模式之校估與驗證... 57 6.2.1 評估指標說明... 57 6.2.2 模式校估與演算... 59 6.2.3 背景資料處理與分析... 65 6.2.4 敏感度分析與探測車佔有率之探討... 70 6.3 動態旅次 OD 推估模式之數值演算... 74 6.3.1 路網下旅次 OD 系統與路徑流系統... 74 6.3.2 案例演算... 77 6.3.3 演算結果分析... 79 第七章 結論與建議...81 7.1 結論... 81 7.2 建議... 84 參考文獻...85
圖目錄
圖 1-1 研究流程圖 ... 5 圖 3-1 系統的輸入輸出示意圖 ... 19 圖 3-2 系統基本關係圖 ... 22 圖 3-3 「一階預測值」的卡爾曼濾波求解示意 ... 25 圖 3-4 「濾波推估值」的卡爾曼濾波求解示意 ... 25 圖 3-5 卡爾曼濾波器演算流程圖 ... 27 圖 3-6 卡爾曼濾波資料推估流程圖 ... 28 圖 4-1 系統實體架構圖 ... 32 圖 4-2 路段編碼示意圖 ... 34 圖 4-3 資料回傳模式示意圖 ... 35 圖 4-4 環路線圈偵測系統示意圖 ... 36 圖 4-5 路段旅行時間預測表欄位內容 ... 38 圖 4-6 旅次 OD 推估分區流量表欄位內容 ... 38 圖 4-7 資料庫系統與模式演算架構圖 ... 39 圖 5-1 九種路口轉向模式示意圖 ... 43 圖 5-2 動態旅次 OD 推估系統結構圖 ... 48 圖 5-2 旅行時間預測與動態旅次 OD 推估之系統演算流程圖 ... 51 圖 6-1 模擬系統路網架構圖 ... 54 圖 6-2 路口號誌設定圖 ... 55 圖 6-3 路網內部旅次產生區域佈設 ... 56 圖 6-4 資料輸出介面 ... 57 圖 6-5 模式預測 MAPE 值 (MODE 1)... 60 圖 6-6 模式預測 MAE 值 (MODE 1)... 60 圖 6-7 預測誤差分佈 (MODE 1)... 61 圖 6-8 模式預測 MAPE 值 (MODE 2)... 62 圖 6-9 模式預測 MAE 值 (MODE 2)... 63 圖 6-10 預測誤差分佈 (MODE 2)... 63 圖 6-11 預測誤差對模式演算資料時間記憶長度 (N) (1.2D) ... 65 圖 6-12 探測車回傳路段旅行時間分佈 ... 66 圖 6-13 模式預測 MAPE 值 (OUTLIER 處理後) ... 68 圖 6-14 模式預測 MAE 值 (OUTLIER 處理後)... 68 圖 6-15 預測誤差分佈 (OUTLIER 處理後) ... 69 圖 6-16 MAPE 對 EPROB 分佈圖... 71 圖 6-17 資料處理前後 EPROB 對 PPROB 之分佈圖... 72 圖 6-18 資料處理前後預測 MAPE 值對 PPROB 之分佈圖 ... 72圖 6-19 路網系統交通分區示意圖之 1 ... 74
圖 6-20 路網系統交通分區示意圖之 2(A)... 75
圖 6-21 路網系統交通分區示意圖之 2(B) ... 75
圖 6-22 推估旅次 OD 反應於路段流量之 MAPE 值 ... 80
表目錄
表 6.2 MAPE 評估標準 ... 58 表 6.1 (0%-20%-50%) 預測誤差分佈 (MODE 1)... 61 表 6.2 (0%-20%-50%) 預測誤差分佈 (MODE 2)... 64 表 6.3 模式 MODE 1 對 MODE 2 比較 ... 64 表 6.4 OUTLIER 資料處理方法 ... 67 表 6.5 (0%-20%-50%) 預測誤差分佈 (OUTLIER 處理後) ... 69 表 6.6 資料處理前後模式預測結果比較... 70 表 6.7 各旅次產生點對應之路徑選擇型態... 76 表 6.8 OD 旅次量與路徑流量計算例... 79第一章
緒論
1.1 研究背景與動機
隨著系統控制、資料管理和車輛偵測技術之演進,其所應用於先進交通管 理系統 (Advanced Traffic Management System, ATMS) 者,係以道路系統效率、 安全之提昇為系統施行之主要目標;都市地區路網系統之下,並以動態號誌控 制、路徑導引等作法進行交通系統之管理。然而,對於一先進交通管理、控制 系統,為達其功能效用,其勢必根據系統化之交通基本資料擷取過程,以掌握 道路交通現況,對於下一時階路網交通流狀況進行準確之預測,進而決定各種 交通控制策略之佈設和施行。其中,並以動態旅次起訖 (Origin-Destination, OD) 矩陣之推估為各種控制策略施行之基礎。1991 年,歐洲共同體 DRIVE I 計劃首 先提出 ODIN 研究案 (Inaudi et al.,1991),將旅次 OD 資訊應用於交通控制策 略,而後各種動態 OD 矩陣之推估方法即相繼提出。 然而,作為交通管理、控制系統之前端,以現行台北市市區路網系統,其 所賴以即時交通資訊之取得,主要係透過路側 CCTV 之閉路監視系統、用路人 回報以及部分環路線圈偵測器之佈設。前者所擷取之動態影像資訊除了判別路 段擁塞現象之外,對於重要交通流參數難以更行進一步的量化分析;後者則由 於其佈設方式兼以維修作業上之疏漏,實質功能應用上亦有其限制。是以本研 究將擬提出一動態交通資訊擷取系統,其係透過 GPS 定位技術與無線通訊技術 之結合,由其他探測車輛上所安裝之車載電腦回報控制中心路段交通流狀況, 經由後端資料庫系統之整合,進行對於路段旅行時間、交通流參數與動態旅次 OD 矩陣之預測演算。 一般而言,由偵測器等固定式路側單元量測所得之交通資料稱為被動交通
資料,為靜態之「點」交通參數;透過道路系統中探測車輛所回報之交通資料 則稱為主動交通資料,為動態之「線」交通參數。目前的公路系統多採用前者 作為其監控、管理之依據;後者之應用一般在於短期之資料蒐集,除了少數以 市區公車為偵測車的準動態系統 (Hall and Vyas, 2000),動態交通資料於即時交 通監控、管理之探討仍舊相當有限。依此,本研究將擬提出一整合主動、被動 交通資料擷取機制,並透過交通參數演算和動態旅次 OD 推估模式之轉換,作 為即時交通控制、管理之前端支援系統。以系統施作可行性與長期運作之考量, 本研究將擬以大眾運輸運具作為探測車輛之主要來源。然而以實施公車專用道 之市區路網下,市區公車之駕駛行為與一般車輛相異甚鉅;再者,應於量路網 系統之擴充性以及偵測資料分布之隨機性,本研究建議以計程車作為探測車輛 之車隊基礎。依此,並期以衍生可能之公私部門合作暨異業結盟之商業機制。 1.2 研究目的與範圍 本研究之主要目的在於建立一整合之交通資料擷取系統暨動態之交通參數 演算、預測系統,進而以相關資訊支援即時交控管理、路徑導引服務等策略施 作。主要內涵包括下列數點: 1. 考量系統於現實路網之施作,就軟硬體層面提出可行之系統實體架構暨 管理資料庫系統。 2. 過去的研究中,對於路段旅行時間預測已有相當準確程度之成果,唯其 研究多針對單一路段或是單一幹道上數個連續號誌路口進行分析。本研究 則擬透過所提出之實體架構,建立一般路網下,較大規模之路段旅行時間 之動態預測模式,並配合資料庫系統設計可行之演算流程。 3. 基於所預測之路段旅行時間,結合路側偵測器所得之路段流量資料,進 而建立路網系統下之動態旅次 OD 推估模式。
考量臺北市市區之路網規模及型態,實證部分,研究中將擬以 (10 幹道 × 10 幹道) 之棋盤型路網進行系統模擬與模式驗證。透過模擬方式進行資料蒐 集、資料分析、處理與模式演算、校估之驗證流程,以確認模式即時演算之 可行性、適用性和準確度。 1.3 研究方法 本研究之研究方法可依「動態路段旅行時間之推估」、「動態旅次 OD 矩陣 之推估」和「模式實證」分為三個主要部分。 1. 「動態路段旅行時間之推估」部分 將以路段旅行時間歷史資料 (時間向度) 與鄰近路段車流 (空間向 度) 影響為主要輸入變數以進行數學模式之建構,考量推估模式在即時 演算上之可行性,為避免大量累積之資料演算,本研究並設計一固定參 數之遞迴最小平方估測演算方法。 2. 「動態旅次 OD 矩陣之推估」部分 同樣考量大量累積資料所衍生之運算困難,本研究將擬建立一遞迴 演算之數學推估模式。此外,由於研究題旨係針對一般路網環境下之市 區道路系統,模式之演算不僅止於動態旅次 OD 矩陣之推估,還牽涉了 每一對 OD 旅次在路網下之路徑選擇問題,而研究中將透過交通分區的 劃分,簡化市區道路規模下之路網複雜度,再行進一步之推估演算。以 現行之旅次起訖推估方法主要係包含了類神經網路 (Artificial Neural Network)、時間序列 (Time Series) 和卡爾曼濾波器 (Kalman Filter) 等,基於前述即時演算之理由和參數化輸出之需求,本研究將採以卡爾
曼濾波器為推估模式之主要方法,並採以遞迴之最小平方估測對相鄰路 段之交通流狀況進行線上校估,處理非重現之車流狀況,以期較精準之 預估結果。 3. 「模式驗證」部分 鑑以系統實作之資料仍未可得,且一定規模下之調查資料難以取 得,本研究將擬以車流模擬軟體,對於模式進行驗證分析,並研選適當 的評估指標,對於控制策略之施行成效進行評估分析。 1.4 研究內容與流程 本研究之具體研究內容如以下幾點之說明: 1. 針對現行台北市市區之路網與偵測器實際之佈設狀況進行細部之了解, 並透過相關文獻之回顧與實際旅行經驗,界定本研究之問題與探討範疇。 2. 探討最小平方估測方法與卡爾曼濾波器在預估模式之應用。 3. 探討主被動偵測系統所蒐集交通流資料之特性與管理資料庫系統內容在 實務上資料存取之操作。 4. 提出可行之系統實體架構,並依管理資料庫系統之內涵擬定系統演算流 程。 5. 建立路段平均旅行時間之推估模式。 6. 建立一般路網下動態旅次 OD 之推估模式。 7. 透過系統模擬進行模式驗證,檢視預測模式之可行性、適用性與準確度, 並針對選取指標項目,評估模式預測之施行成效。
圖 1-1 研究流程圖 回 饋 修 正 研究題旨、研究範疇與基本路網型態之確認 文獻回顧與現況探討 旅行時間預測方法 動態旅次 OD 推估問題 方法論之探討 系統實體架構與管理資料庫系統之建立 模式建構 路段旅行時間 預測模式 動態旅次 OD 推估模式 系統模擬與模式校估、驗證 結論與建議 探測車應用與 資料擷取系統
1.5 論文章節說明 依此,論文全篇分為八個章節,內容依序概述如下: 第一章 緒論 說明研究之背景、動機、目的、範圍、分法、內容及流程。 第二章 文獻回顧 由於以環狀線圈應用於交通偵測之相關技術研究業已較為成熟,是以本 章首先將側重於探測車輛應用於交通資料擷取之相關研進行回顧,並參 酌一般路側偵測器之使用現況以了解系統運作之下對於模式的相關限制 條件;再者,對於模式構建部分,分以動態旅行時間預測、動態旅次 OD 推估兩個方面進行文獻回顧。 第三章 方法論 主要對於研究中所使用之研究方法進行探討,其中包含最小平方估測方 法與卡爾曼濾波之理論架構,以至於其推廣形式之應用。 第四章 市區棋盤型路網環境下之交通資訊擷取系統 本章主要針對系統施行環境、相關資料庫系統內容進行介紹,並對於此 一環境係之控制系統架構、管理資料庫、可行之演算流程做概括之說明。 第五章 市區棋盤型路網環境下動態旅行時間預測與旅次 OD 推估模式之建立 模式之構建分為路段旅行時間預測與動態旅次 OD 推估兩部分,根據第 四章所建立之系統環境下,透過數學模式之建構對於系統狀態進行詮釋 和預測。首先引入最小平方估測方法進行系統狀態之推估,以對於市區 棋盤型路網環境下之路段旅行時間進行預測。其後,透過前述所求得之 路段旅行時間預測為基礎,並根據路側偵測器所測得之交通流量資訊, 建立路段流量與旅次 OD 流量之數學關係式,並對於推廣卡爾曼慮波於 模式演算之應用進行說明。 第六章 實證分析與效用評估
透過模擬軟體建立大規模之路網資料擷取系統,透過系統模擬過程,對 於路段旅行時間預測模式進行校估和驗證;在動態旅次 OD 推估模式部 分則是透過案例試算,從演算結果分析中驗證模式之合理性。
第七章 結論與建議
第二章
文獻回顧
在即時交通擷取系統中可分為以路側偵測器為主之被動交通資訊擷取與探 測車輛之主動偵測兩類;對於前者而言,目前應用於一般市區道路系統者多透 過環狀線圈進行交通流狀況之判讀,其相關之佈設、技術研究亦較為成熟,是 以本章第一節將先行針對後者,探測車輛應用於交通資料擷取之相關研進行回 顧,從中對於系統運作之下相關數學模式演算限制條件進行了解;第二小節則 是回顧路段旅行時間預測之推估方法;最後,介紹動態旅次 OD 推估方法於公 路系統之應用發展歷程,並探討個別預測模式系統之運作特性。 2.1 探測車輛於交通資料擷取系統之應用與相關研究 國內在利用探測車蒐集交通資料方面,吳佳峰 (2001) 透過全球定位系統 之車輛歷史旅行資料預估車輛旅行時間,設定車輛運行路線分段以及車輛歷史 旅行資料劃分時段之準則,使模式能夠同時適用於城際間長途旅次以及市區內 旅次,模式將預估車輛旅行時間分隔為車輛運行時間以及車輛停等時間。同時 為了補強運用車輛歷史旅行資料預估無法有效反應車輛實際遭遇非預期性運行 狀況之改變,模式將運用車輛實際運行時所回傳之 GPS 定位訊號,模式從車輛 實際之平均運行速度、前車回傳之該路段旅行時間資訊,調整預估車輛運行時 間;此外,模式從車輛實際停等時間,判斷預估車輛停等時間是否有超估或低 估之現象,並行調整之。為了測試預估模式之適用性,並以實際國內客運業者 車輛旅行資料對預估模式作實例之測試。從測試結果發現模式在未遭遇非重現 性之壅塞時,預估旅行時間有著相當不錯之準度,而當遭遇壅塞時,模式之預 估旅行時間誤差亦能透過模式預估旅行時間之調整機制而控制於可接受之誤差 範圍內。林世傑 (2001) 則以北部區域路段為研究範圍,整合中華顧問公司交通千 里眼 (E-traffic) 所提供之即時交通播報資訊 (如事件、施工、交通偵測器 等),再加上高速公路幾何、交通量之調查與客運車輛 GPS 等資料,盡可能呈 現真實的行車環境,主要以都市地區交流道為預測對象,此外有鑑於道路使用 者之起訖點不同,發展個別單獨預測模式之條件過於複雜,因-此將研究範圍 分成數個群組,構建多個預測模式,且範例資料考慮實際應用未來時間的觀念, 分別進行類神經網路之訓練與測試工作,並評選績效較佳的模式進行最後實證 分析。
在國外方面,Nikhil Bhandar et al. (1995) 利用複合資料來源(Data from Multiple Sources)來進行資料融合以推估幹道事件,資料來源可為固定偵測器、 探測車、其他方式,蒐集之資料分別為每五分鐘的特定區段的路鏈車流量,車 輛自由流率、旅行時間,以及利用其他方式所得到資訊如發生意外事件的路段, 駕駛者經過該路段時通報中心或由救護人員通告,由此事件偵測系統可估計預 期事件,與其所影響該路鏈之旅行時間值。Ivan & Sethi (1998) 同樣對於都市 地區號誌化幹道,以環狀線圈與探測車輛為資料蒐集來源,改利用類神經網路 演算建構事件偵測系統。 Sen 等人 (1997) 經由實測資料提出,透過探測車輛進行路段旅行時間推 估,假設探測車數量為n,其平均旅行時間之變異數呈現 σ = a + b / n 之數學 關係,亦即其變異數並不會隨著探測車輛的佔有比例和樣本數的增加而趨近於 零。對於此一研究結果,Hellinga & Fu (1999) 說明其主要原因係由於路段旅行 時間與號誌控制路口和鄰近路段車流的駕駛行為間存在高度之相關所致,並依 上下游路口的直行、左轉、右轉,可將兩號誌控制路口間之路段旅行時間分佈 區分為九個群組。其後 (2002) 並建議依此九個群組,以分層抽樣之概念對於
探測車輛所回報資料進行分組,再行推估路段旅行時間,俾可提高模式之準確 度。
此外,英國 ITIS 組織從 2000 年 2 月起開始蒐集並儲存主要道路上流動車 輛交通資料(Floating Car Data, FCD)(Jonathan Burr & Nick Simmons, 2001), 初期僅限於對某些道路提供足夠、有效之交通資訊,並且於 2001 年將探測車數 量逐漸擴充到足以產生二千一百萬筆車輛定位資料。雖以初始之探測車數量並 無法符合統計的信賴水準,但 ITIS 究指出,透過融合(Fusion)即時(Real Time) 與歷史(Historic)FCD 資料以及日誌(Journalistic)資料,只須掌握重要的預 測路段、時段,即可提出有效的資訊,而無須全天候、以大規模車隊去搜集即 時交通資料。 2.2 旅行時間預測方法 就基本概念之差異,李穎 (2002) 將旅行時間預測方法分為前向式與回饋 方式兩種;對於微觀個體而言,前者係透過駕駛人行為建構模式,以行為模式 進行駕駛人行為模擬之假設性資料,進而推導旅行時間;回饋方式則是透過偵 測所得之交通參數資料推求道路交通流狀況,以進行旅行時間之預測,現行多 數之旅行時間預測多採此一方法。 以研究範圍區分,旅行時間預測可分成城際與市區旅行時間預測。在城際 旅行時間預測方面,由於排除了號誌控制因素,通常較市區旅行時間預測單純, 推估方法係以基本交通參數來建立物理預測模式,進而推估旅行時間,並大致 分成二類:一是以車行速度來估算,利用車輛位於區段之起點與迄點之速度, 由區段距離除以車速來計算區段的旅行時間;另一是車流量平衡來估算,利用 路段起、迄點之車流量平衡來估算路段中因壅塞而滯留的車輛數,當區段中有
滯留的車輛,則使用車流紓解率計算為了疏散區段內滯留車輛所需時間,此紓 解時間加上自由車流路況下之旅行時間即為估算區段旅行時間。 一般而言,在旅行時間預測之研究課題中,通常將各路段旅行時間視為獨 立,對於各路段之旅行時間進行預測,而後加總各路段旅行時間以求得總旅次 時間。Park 等人 (1999) 提出,若是各路段之旅行時間互不獨立,對於個別路 段與總旅行時間之預測將行複雜許多。 在市區旅行時間預測模式方面,由於市區旅次受到多種運具間之相互干擾 以及路口號誌影響,其考慮因素多較城際旅次之旅行時間預測廣泛,模式複雜 度亦較城際旅次者為高。其代表性的預測方法以隨機性動態模式之旅行時間推 估及以探測車輛之旅行時間推估,多為近期研究所採用。隨機性動態模式方面, 李俊賢 (1996) 引用 L.Fu 與 L.R. Rilett (1995) 所提之動態隨機最短路徑問題, 重新推導性隨機動態旅行時間模式,並將旅行時間的平均值、變異數與不確定 性加入計算邏輯中,以了解變異數如何影響旅行時間推估。另外,早期 Box & Jenkins (1976) 亦利用時間序列中的自迴歸移動平均整合模式 (Autoregressive Integrated Moving Average, ARIMA) 模 式 , 建 立 一 個 包 括 自 迴 歸 項 (Autoregressive, AR)、移動平均項 (Moving Average, MA) 與差分處理等三部分 的長期旅行時間預估模組。在探測車輛做為旅行時間工具之應用上,Dipl.-Ing 等 (2001) 透過模糊類神經方法,融合地區性交通設施及探測車蒐集的資料, 進行旅行時間、速度之估算;Jarjee & Drane (1997) 以自身發展出的修正型線性 車輛旅行時間預估模式為主軸,藉由 GPS 強大的資料蒐集能力,來獲取更精準 的旅行時間預測能力,並配合即時路口號誌的修正,使得預測能力更為提昇。 近期的研究中,Zhang & Rice (2003) 則是建立一線性模式以進行路段旅行時間 之推估。推估時間與歷史資料平均時間、初始推估值之間呈一線性關係,透過 疊帶式加權最小平方法 (Iteratively Re-Weighted Least Squares, IRLS) 進行其中
的參數校估。 國內近期研究中,張耀明 (1999) 對台灣地區城際旅行時間可靠度進行分 析與量測,發現影響公路客運整體旅行時間可靠度最為嚴重的是行駛時間延 滯,而行駛時間延滯的原因通常是路線上的交通狀況,若交通狀況堵塞愈嚴重, 則產生的延滯相對增加,另外路線上的交通號誌、交通設施狀況、旅客上下車 數量、停靠站次數,及路線長度亦是影響因素。張修榕 (2001) 則利用即時交 通資訊預測旅行時間,並分兩階段進行,第一階段利用模擬方式,產生交通資 料,作為資料的產生器,並且作為研究之最後旅行時間驗證部分,第二階段則 是採用三層、完全連結及前向式的網路架構,配合倒傳遞演算法來建立不同交 通車流型態下之旅行時間預測模式,期望能透過偵測器所偵測之交通資料,提 供精準的旅行時間預測,經由反覆的校估與測試,於高速公路旅行時間預測效 果良好。 2.3 動態旅次 OD 推估問題 旅次 OD 矩陣之推估係為運輸規劃與交通工程中之重要參考依據,其所反 映之旅次需求,傳統上多應用於運輸規劃層面。1980 年代之前,OD 矩陣之推 估主要係透過大規模的交通調查,再行以重力模式為基礎的各種統計方法進行 推導。然而,相關方法所需之成本高昂,其中並且存在調查與重力模式計算所 產生之誤差,致使其精確度偏低,誤差約介於 20%至 45%之間。相關研究領域 的主要突破係由 Vdnzuylon 與 Wllumsen (1978) 所提出,以一定數量之路段流 量觀測值 (Traffic Counts) 倒推 OD 矩陣的推估方法。因以路段交通流量資料之 收集在實務上較為容易,且以此一方法之相對成本較低,是以過去二十年來各 種路段流量推估 OD 之方法陸續被提出。其大多根據最大熵值 (Maximum
與廣義最小平方法 (Generalized Least Squares, GLS) 等原理為基礎進行推演, 近年來,相關研究亦應用人工類神經網路的演算方法於旅次 OD 矩陣之推估 (尹娟與郭國會,2000),然而相關演算法往往牽涉較複雜之交通指派演算與疊 代過程,一般而言,在實務上多用於靜態之 OD 矩陣推估,以作為長期交通需 求預測與運輸規劃之參考依據,詳細的內容可參考 Nguyen (1984)、Casetta 與 Nguyen (1988) 對於相關旅次 OD 推估方法之全面性回顧。 1990 年代以降,由於自動偵測技術演進、ITS 之發展,動態交通量指派 (Dynamic Traffic Assignment, DTA) 技術相繼提出,進而衍生出旅次 OD 推估在 交通控制系統上之應用。1991 年,歐洲共同體 DRIVE I 計劃之下 ODIN 研究案, 首先探討如何進行動態旅次 OD 矩陣之推估,並將其資訊應用於交通控制策 略;隔年 DRIVE Ⅱ計劃之下 DYNA 研究案 (Ben-Akiva、Cascetta 與 Gunn, 1992) 則是於部德國高速公路路網部分路段,透過動態旅次 OD 矩陣進行即時 交通流狀態之預測。以下,主要將對於歷年所發展動態旅次 OD 矩陣之推估方 法、應用於城際公路、都市路網系統之模式建構作系列之回顧。 一般而言,動態旅次 OD 推估方法可分為指派依據 (Assignment-Based) 和 非指派依據 (Non-Assignment-Based) 兩種,前者係以可靠動態指派模式和 DTA 矩陣以之為基本假設條件;後者則是以出入系統之流量進行交通流參數推估。 以下將就此兩類方法回顧相關文獻。 2.3.1 指派依據之動態旅次 OD 推估方法 此一類推估方法之基本假設即在於存在一可靠之動態流量指派模式,透過 模式以產生路網下路段流量之使用型態,而根據其求解方法和細部假設互異,
其中又可再分為遞迴式 (Recursive) 和非遞迴式 (Non-Recursive) 兩類: 1. 遞迴式推估方法 此一方法係假設路段車流量與旅次 OD 之時間序列存在一自迴歸 (Autoregressive) 性質,依此推導限制式之集合。在此一前提下 Okutani (1987) 首先提出以卡爾曼濾波建構之動態旅次 OD 預測模式,以前期參 數校估和當期路段流量更新,建立方程式狀態空間之標準模式以簡化卡 爾曼濾波之應用,其中並假設旅次 OD 流量滿足一隨機過程 (Random Walk Process)。Ashok 與 Ben-Akiva (1993) 則是依據 Okutani 的模式, 針對其方程式中旅次 OD 流量矩陣之假設置換為以歷史資料推估而得 的先驗資訊。 2. 非遞迴式推估方法 主要係根據路段流量變化之時間序列和 DTA 矩陣,從靜態推估模 式延伸以近似於動態路網的 OD 型態。其動態旅次 OD 與路段流量之間 可表示為以下方程式: 1 r t ki lt lt ki k K i q τ F = = =
∑ ∑
(式 2.1) 其中, F ki 對於一 OD pair r,其中之一路徑 k,在 i 時段下自 r 的起點出發,選擇k 路徑的車流量; q lt 在t 時段下,通過 l 路段的車流量; τltki 表示F 對於ki q 車流量之貢獻,若 k 不通過 l,則lt ki lt τ 為 0;反之,依旅行時間和到達率之分配,τltki為 0~1 的 機率值。此一方程式係為推估 OD 矩陣參數之動態限制式集合,並可依此守 恆式推估旅次 OD 矩陣F 。 kt
Willumson (1984) 首先延伸最大熵值之靜態推估原理,應用於多重 時間間隔 (Multiple Ttime Intervals) 以建立推估模式。其後,Casetta 與 Nguyen 以類似的指派邏輯,間序應用最小平方估測、最大概似、貝氏 推估 (Bayesian Inference Estimator) 於動態旅次 OD 推估。Casetta 等人 (1993) 則是由靜態旅次 OD 推估模式中衍生出「同步式 (Simultaneous)」 與「連續式 (Sequential)」兩種動態推估模式類型,並以廣義最小平方 法構建其預測模式,所謂同步式與序列式之差異在於同步式係為每一時 段下推估一完整之旅次 OD 矩陣;連續式則是漸次以前一次推估結果配 合所觀測交通量進行遞迴估測,進而推估得一完整旅次 OD 矩陣。於義 大利 Berscia-Padua 高速公路測試之結果,證實在無先驗資訊的條件下 可得到滿意之估測成果。同一時期,Van Aerde (1993) 亦基於相同假設 條件下,提出其 QUEENSOD 模型之實作應用。 較 近 期 之 研 究 中 , Hazelton (2000) 提 出 一 多 變 量 常 態 分 佈 (Multivariate Normal Distribution, MVN) 方法,以最大對數概似推估 (Maximum Log-Likelihood) 進行演算,並比較在路網不存在先驗知識之 條件下,相較於 GLS 方法能夠得到較佳的解。Sherali (2001) 則是將路 段流量和路徑流量間之關係表達為非 1 即 0 的參數分配,以 Constrained Least Squares 透過一 Column Generation 的演算法進行求解,以簡化演 算之複雜度。
此 類 方 法 之 下 , 求 解 DTA 參 數αlhkt 係 依 據 全 有 或 全 無 指 派 (All-or-Nothing Assignment) 和均勻旅行時間分佈 (Uniform Travel Time Distribution ) 之啟發式求解過程,應用於動態交通流量指派上,仍舊存 在與現實條件之差異。 2.2.2 非指派依據之動態旅次 OD 推估方法 此一推估方法係假設可透過偵測器或是動態監測方法取得出入系統之流 量,則動態 OD 和節點流量之關係可表示為以下之方程式: ( ) 1 N k mk k m j ij ij m i y ρ x − = =
∑∑
(式 2.2) 其中,ykj 表示在第 k 時段內,由訖點 j 離開系統之車流量; xijk 表示在第 k 時段內,由起點 i 進入系統的 ij 旅次對之車流量; ρijmk 係指在第 k 時段內,xij(k m− )之旅次中到達訖點j 之比例。 於上述之方程式中,除了以旅行時間計算車流對路徑之到達率外,並不依 賴動態交通指派模式。其中所發展出推估模式繁多,以下將行進一步逐列介紹: 1. 最小平方法 Cremer 與 Keller (1981, 1984) 以時間序列之方法分析交通量觀測 值,初步構建時變性之旅次 OD 矩陣推估模式,其後,於此一推估模式 架構下,Cremer 與 Keller (1987)、Nihan 與 Davis (1987) 分別以最小平 方法發展出遞迴與非遞迴之演算法則。然而其演算流程牽涉反矩陣之計 算,在即時應用上較為繁複,且模式架構中並未納入流量守衡限制式。其後,Nihan 與 Davis (1987) 假設在短時間之內,同一時段下之流量分 佈參數為常數,藉以納入限制式之考量,使推估方法有較高之可信度, 然而過多反矩陣的運算,仍舊使演算流程中存在相當的難度。
2. 遞迴演算法
除了上述方法之外,Nihan 與 Davis (1987) 再行透過遞迴式預測誤 差方法 (Recursive Prediction Error Techniques) 以標準化方法納入流量 守衡限制式之考量。Van de Zijpp 與 Hamerslag (1994) 則是透過貝氏更 新原則 (Bayesian Updating Principle) 將限制式納入卡爾曼濾波的演算 過程之中。Nihan 與 Hamed (1992) 提出固定點問題 (Fix-Point Problem, FPP) 方法,以最大期望值方法求解最大概似估計值,將流量分佈參數 求解過程簡化為 N 個非線性等式和 N 個變數的求解問題,計算得較低
之變異數且相較最小平方法有較高的準確度。
3. 修正線性模式
Bell (1991) 首先透過旅行時間因子提出一延伸之線性模式,並採用 Robertson (1969) 的小隊分散關係 (Platoon Dispersion Relation) 表示路 段流量與出入系統流量之間的動態關係,並假設路口旅行時間長度不能 超過一單位時間之間隔,以簡化路口轉向流量之分析。然而其演算流程 中牽涉大量未知系統參數,以致於模式無法求得有效推估結果。稍後, Bell (1991) 再行修正模式中旅行時間之分佈不受任何限制,以有限遞迴 最小平方法 (Constrained Recursive Least Squares, CRLS) 估算流量分 佈參數,其中,「有限」係謂未知參數路徑對 OD 比率和車隊擴散比率 存在 0~1 的有效求解空間內。若忽略限制式,應用 Lagrange 乘數進行 演算,演算法將得以收斂;若考慮限制式,則等式中過多的參數將導致 估算的不準確。
4. 考量路段主線流量 此一系列發展過程之中,關於高速公路上動態旅次起訖推估之模 式,以 Chang and Wu (1994) 所建立之推估模式最為完整,且於實務面 之執行較為可行。Chang 與 Wu 以非線性模式取代了 Bell 的小隊分散 函數,針對單一運輸走廊,以一組上閘道和下閘道之間路段定為一路段 分區,依此劃分運輸走廊為若干路段,以卡爾曼濾波進行動態旅 OD 之 推估,相較於以往之研究,最主要之差異在於採用主線道流量資訊、考 慮時間延滯,並假設相同 OD 旅次之旅行時間相差不超過一個時段,以 減少所需校估之參數數目。其後,卓訓榮、曾國雄等 (1997) 針對其模 式中狀態變數之混用提出修正,並以 Greenshield 模式對於路段旅行時 間進行較準確之估算;張堂賢與李宗憶 (2002) 則是採以旅行時間符合 Poisson 分佈之假設。然而此一推估方法係侷限於單一運輸走廊之動態 旅次 OD 推估,而並未擴及路網系統。
針對此一缺漏,Chang 與 Wu (1996)、Chang 與 Tao (1996) 進一 步延伸其模式,依偵測器之佈設應用封鎖線 (Cordonline) 將整體路網 分為數個子路網,使其包含不同形式 screenline flow 時間序列所建立之 限制式,計算路口轉向的流量分佈。
第三章
方法論
3.1 最小平方法 最小平方法是數學家高斯於 1795 年首先提出。當時高斯是利用此一方法來 確定行星的軌道參數,目前此法已應用到工程界的許多領域,同樣在動態系統 的參數估測方法此法也獲得了廣泛的應用,並且成為參數估測中最成熟、基本 的方法之一。 3.1.1 基本關係式 假定受控過程的結構如圖 3-1 所示。 圖 3-1 系統的輸入輸出示意圖 其中,輸入量為x1,x2,K,xn,系統待估測的參數為θ1,θ2,K,θn,輸出量為y 。 系統輸入、輸出和參數三者的關係假定可以用如下的線性方程來表達: n nx x x y=θ1 1 +θ2 2 +L+θ 設在t1 t,2,L t,m共m個時刻,分別對x和y 進行了m次觀測。觀測所得的數 據可得如下m個代數方程式:( )
i x( )
i x( )
i , i , , ,m y =θ1 1 +L+θn n =12K (式 3.1) M x1 x2 xn 系統參數 n , , ,θ θ θ1 2 K y如果寫成矩陣向量的型式,則有: θ ε = + Y X (式 3.2) 其中,
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
1 1 1 2 1 1 1 1 1 1 1 1 2 2 2 2 , , , n n n n n m m n m y x x e y x x e θ ε y m x m x m e m θ θ θ × × × × = = = = Y X L L M M M O M M L ε表示誤差向量,或稱殘差,按照最小平方法的原理,校估之過程即決定θ向 量使殘差的平方和為最小,這時應取m>n。 以公式表示,就是要求得參數θ的估測θˆ,使得性能指標J為最小:( )
2 T 1 min m i J e i ε ε = =∑
= (式 3.3) 由(式 3.2)可得: ε= −Y Xθ(
) (
T)
T T T T T T J θ θ θ θ θ θ = − − = − − + Y X Y X Y Y X Y Y X X X (式 3.4) 對J求關於θ 的導數,並令其為零,決定J達到最小時θ 所應滿足的條件為: T T ˆ ˆ 2 2 0 θ θ θ θ = ∂ = − + = ∂ J X Y X X T θˆ= T X X X Y(
T)
1 T ˆ θ = X X − X Y (式 3.5)當X X 為非奇異矩陣,按 (式 3.5) 求得的T θˆ稱為參數θ的最小平方估計, 由於估測向量θˆ係透過充足之系統數據一次計算求出,所以 (式 3.5) 又稱一次 估測公式。 3.2 卡爾曼濾波理論 Rudolph E. Kalman 為推求離散線性問題之遞迴解,於 1960 年提出了卡爾 曼濾波理論 (Kalman Filter) ,係以最小平方法之理論為根據所建立對於一動態 隨機系統之狀態變化進行推估之作家化求解過程。訖今,已廣泛應用於電機、 航太、生化、水利等各種不同領域,具有完備之理論基礎。以下將針對濾波器 結構、理論之內容與特性進行介紹。 3.2.1 系統基本描述 假設一線性、離散、有限維度 (Finite-Dimensional) 之動態隨機系統,其系 統基本關係表示如圖 3-2 所示。
圖 3-2 系統基本關係圖 若將圖中之關係表示為方程式,可以一系統狀態式 (或稱系統預測式) 和 觀測式予以表現: 系統狀態方程式: (x t+ =1) f t x t( ) ( )+g t w t( ) ( ) (式 3.13) 系統觀測方程式: ( )z t =h t x t( ) ( )+v t( ) (式 3.14) 其中, ( )x t 為系統狀態變數, ( )z t 為系統觀測值; ( )f t 、 ( )g t 和 ( )h t 分別為 相對應的係數矩陣, ( )w t 和 ( )v t 則分別為系統輸入和輸出項的隨機誤差過程 (Noise Process),以下並行進一步介紹系統運作之若干假設條件:
1. ( )w t 和 ( )v t 兩者皆為白雜訊過程 (White Noise Process),亦即, [ ( ) ( )] 0 E w t w l = E v t v l[ ( ) ( )]=0,∀ ≠t l 2. ( )w t 和 ( )v t 兩者皆為以 0 為平均數、具有固定值變異數矩陣的高斯隨機過 程 (Gaussian process),亦即, T [ ( )] 0 [ ( ) ( ) ] ( ) ( , ) E w t = , E w t w l =Q t ×δ t l T [ ( )] 0 [ ( ) ( ) ] ( ) ( , ) E v t = , E v t v l =R t ×δ t l
( )
w t
g t
( )
∑
Delay∑
( )
f t
( )
h t
z t
( )
( )
v t
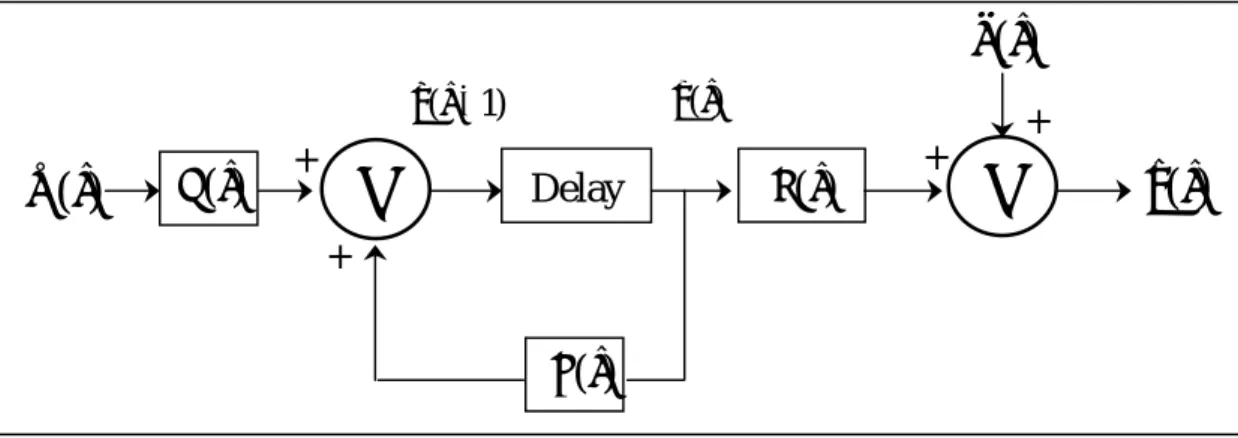
+ + + + ( 1) x t+ x t( )其中, ( , )δ t l 為 Kronecker delta,在 t l= 的條件下, ( , )δ t l = ;反之,1 ( , ) 0 δ t l = 。 3. ( )w t 和 ( )v t 為彼此獨立的隨機過程,即, E w t v t[ ( ) ( )]=E w t E v t[ ( )] [ ( )]=0,∀t 4. 一般假設系統初始狀態值 (0)x 為平均數、變異數矩陣已知之高斯隨機變 數,帶入初始直如下: E x[ (0)]=x(0) T [( (0) (0))( (0) (0)) ] (0) E x −x x −x = p 根據上述系統特性與假設之敘述條件下,濾波問題即利用系統本身之已知 隨機特性,透過量測所得之觀測值 ( )z t ,(t=0,1, 2...T),進而推估每一時階下 的系統狀態變數 ( )x t 。由數學式表示,濾波器將於每單位時階下,遞迴求解下 列變數之估測值, $( | 1) [ ( ) | (0), (1),..., ( 1)] [ ( ) | ( 1)] x t t− =E x t z z z t− =E x t Z t− (式 3.15) $( | ) [ ( ) | (0), (1),..., ( )] [ ( ) | ( )] x t t =E x t z z z t =E x t Z t (式 3.16) 其個別估測數平均值之誤差共變異矩陣則如下所示, $ $ T ( | 1) [( ( ) ( | 1))( ( ) ( | 1)) ] p t t− =E x t −x t t− x t −x t t− (式 3.17) $ $ T ( | ) [( ( ) ( | ))( ( ) ( | )) ] p t t =E x t −x t t x t −x t t (式 3.18)
上 式 之 中 , $( | 1)x t t− 即 為 , 在 已 知 截 至 (t− 時 階 以 前 的 觀 測 值 資 訊1) ( (0), (1),... (z z z t−1))之條件下,系統狀態變數 ( )x t 的估計值,一般稱為「一階
預測值 (One-Step Ahead Predection)」;同理,$( | )x t t 為截至 t 時階以前的觀測 值資訊 ( (0), (1),... ( ))z z z t 為已知之條件下,系統狀態變數 ( )x t 的估計值,一般 稱為「濾波估計值 (Filtered Estimate)」。而卡爾曼濾波器即為一透過新訊息的 觀測對於預測系統參數進行校估,進而推估系統狀態之演算方法。 3.2.2 卡爾曼濾波器之求解 藉由圖 3-3 所說明一階預測值得求解方法,卡爾曼濾波器將以第 t 時階的 觀測值 ( )z t 推估求解$( 1| )x t+ t ,當式 3.19 中之逆矩陣存在,即可透過離散型 Riccatiz 方程式求解 (p t+1| )t 如下: $( 1| ) [ ( ) ( ) ( )] ( |$ 1) ( ) ( ) x t+ t = f t −K t h t x t t− +K t z t = f t x t t( ) ( |$ − +1) K t z t( )[ ( )−h t x t t( ) ( |$ −1)] = f t x t t( ) ( | )$ (式 3.19) T T T T ( 1| ) ( ) ( | 1) ( ) ( ) ( ) ( | 1) ( ) ( ) ( ) ( ) p t+ t = f t p t t− f t −K t h t p t t− f t +g t Q t g t T T ( ) ( | ) ( ) ( ) ( ) ( ) f t p t t f t g t Q t g t = + (式 3.20) (式 3.19)、(式 3.20) 中, ( )K t 是為所謂「一階預測值」的卡爾曼增益 (Kalman Gain) 矩陣,可透過以下的關係式求得: T T ( ) ( ) ( | 1) ( ) [ ( ) ( | 1) ( ) ( )] K t = f t p t t− h t h t p t t− h t +R t (式 3.21)
圖 3-3 「一階預測值」的卡爾曼濾波求解示意 而在濾波估計值得求解方法之中,在假設系統初始狀態值 (0)x 為已知的條 件下,時階 t 的「濾波推估值」及其誤差共變異矩陣可經由下列關係式求解, 其求解關係則如圖 3-4 所示: $( | ) $( | 1) ( )[ ( ) ( ) ( |$ 1)] x t t =x t t− +K t z t −h t x t t− (式 3.22) ( | ) ( | 1) ( ) ( ) ( | 1) p t t = p t t− −K t h t p t t− (式 3.23) 上式中之 ( )K t 則為「濾波推估值」的卡爾曼增益矩陣,可由下式求得: T ( ) ( | 1) ( ) [ ( ) ( | 1) ( ) ( )] K t = p t t− h t h t p t t− h t +R t (式 3.24) 圖 3-4 「濾波推估值」的卡爾曼濾波求解示意 前述之「一階預測值」方程式,因以其描述系統狀態變數在該時階內自然 演進之隨機過程,是以一般又稱為依時更新 (Time-Update) 方程式或是「系統
$( 1| )
x t
+
t
x t t
$( | 1)
−
( )
z t
K t
( )
Delay( )
h t
( )
f t
∑
∑
+ + + _$( | )
x t t
x t
$( 1| )
+
t
( )
z t
Delay( )
K t
( )
h t
( )
f t
∑
∑
+ + + _$( | 1)
x t t
−
狀態推估演進 (State Estimate Extrapolation)」;「濾波推估值」方程式以其推估 系 統 狀 態 變 數 時 納 入 了 該 時 階 量 測 資 訊 值 之 校 估 , 是 以 又 可 稱 為 量 測 值 (Measurement-Update) 更新方程式或是「系統狀態推估更新 (State Estimate Update)」。一般而論,以「濾波推估值」方程式所得之系統狀態變數推估值較 「一階預測值」方程式所得之結果準確,因其考慮了最近一次量測所得之相關 資訊。此外,在系統初始值 (0)x 部分,由於其特性不易取得,通常假設其為平 均數與共變異矩陣已知之高斯隨機變數,取初始條件為, $(0 | 1) (0) x − =x (0 | 1) (0) p − = p 完整之演算流程則如以下各式所列,其演算流程之結構圖如圖 3-5 所示: $( | ) $( | 1) ( )[ ( ) ( ) ( |$ 1)] x t t =x t t− +K t z t −h t x t t− $( 1| ) ( ) ( | )$ x t+ t = f t x t t T T ( ) ( | 1) ( ) [ ( ) ( | 1) ( ) ( )] K t = p t t− h t h t p t t− h t +R t (式 3.25) ( | ) ( | 1) ( ) ( ) ( | 1) p t t = p t t− −K t h t p t t− T T ( 1| ) ( ) ( | ) ( ) ( ) ( ) ( ) p t+ t = f t p t t f t +g t Q t g t
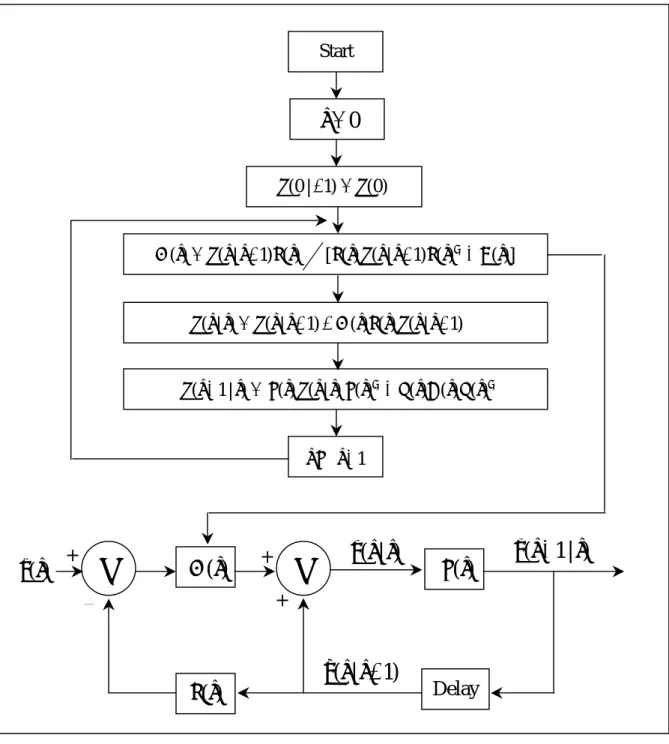
圖 3-5 卡爾曼濾波器演算流程圖 將上圖之演算流程內容反應為資料線行之推估流程即如圖 3-6 所示 。從起 始條件x$(0 | 1)− =x(0)、 (0 | 1)p − = p(0)開始求得濾波值$(0 | 0)x 、 (0 | 0)p ,經過 狀態預測視之計算即求得第一階之狀態預測值$(1| 0)x 、 (1| 0)p ,待第一階之系 統觀測資料回傳,透過系統校估過程得到第一時階之濾波推估值$(1|1)x 、 (1|1)p Start
0
t
=
(0 | 1) (0) p − = p ( ) ( | 1) ( ) [ ( ) ( | 1) ( )T ( )] K t = p t t− h t h t p t t− h t +R t ( | ) ( | 1) ( ) ( ) ( | 1) p t t = p t t− −K t h t p t t− ( 1| ) ( ) ( | ) ( )T ( ) ( ) ( )T p t+ t = f t p t t f t +g t Q t g t 1 t→ +t$( | )
x t t
$( 1| )
x t
+
t
( )
z t
Delay( )
K t
( )
h t
( )
f t
∑
∑
+ + + _$( | 1)
x t t
−
再行依同樣的演算過程進行下一階之預測。 圖 3-6 卡爾曼濾波資料推估流程圖 3.2.3 推廣卡爾曼濾波器 前一小節所述理論主要係針對線性濾波問題的遞迴演算法,然而,當系統 狀態推估過程中牽涉未知參數的求解或是較複雜之參數形式,問題則衍生為非 線性之濾波問題。就現階段而言,關於非線性濾波問題求解的理論和演算法都 還不是相當成熟,一般處理上,會透過一近似演算將非線性系統線性化,即稱 為推廣卡爾曼濾波器。 對於推廣卡爾曼濾波器之演算,第一步即是將非線性系統線性化,再透過 線性卡爾曼濾波器進行狀態推估。對於非線性系統,假設其基本系統狀態方程 式和觀測式具有以下的一般形式: 系統狀態式: (x t+ =1) f x t t[ ( ), ]+g x t t w t[ ( ), ] ( ) (式 3.26) 系統觀測式: ( )z t =h x t t[ ( ), ]+v t( ) (式 3.27) 其中, [ ( ), ]f x t t 、 [ ( ), ]g x t t 和 [ ( ), ]h x t t 是為 ( )x t 之已知非線性函數; ( )x t 為 Time Stage x(t) $(0 | 1) (0) x − =x (0 | 1) (0) p − =p $(0 | 0) x (0 | 0) p $(1| 0) x (1| 0) p $(1|1) x (1|1) p p(2 |1) $(2 |1) x $(2 | 2) x (2 | 2) p $(2 | 3) x (2 | 3) p $(3| 3) x (3 | 3) p (4 | 3) p $(4 | 3) x $( +1| ) x n n ( 1 | ) p n+ n
系統狀態變數; ( )z t 為觀測值; ( )w t 和 ( )v t 為零均值之高斯白雜訊序列,相關 假設條件與線性系統相同。若 [ ( ), ]f x t t 、 [ ( ), ]g x t t 和 [ ( ), ]h x t t 為平滑之函數,其 將可沿條件均值x t t$( | )和x t t$( | 1)− 展開為泰勒級數: $ $ [ ( ), ] [ ( | ), ] ( )[ ( ) ( | )] f x t t = f x t t t +F t x t −x t t +L (式 3.28) $ [ ( ), ] [ ( | ), ] g x t t =g x t t t (式 3.29) $ $ [ ( ), ] [ ( | 1), ] ( )[ ( ) ( | 1)] h x t t =h x t t− t +H t x t −x t t− +L (式 3.30) 上列式中,F t( ) f x t( , ) x x t t$ ( | ) x = ∂ = ∂ $ ( | 1) ( , ) ( ) h x t x x t t H t x = − ∂ = ∂ 矩陣F 的第 i 行第 j 列元素即為向量函數 ( , )f x t 的第 i 個元素對狀態向量 x 的第j 個元素的偏微分,再將x x t t= ( | )代入到所求得式中。同樣的方式求得 ( ) H t 。若是忽略泰勒級數中[ ( )x t −x t t$( | )]的高次項,則可將系統狀態方程式和觀 測式簡化為以下的線性系統: ( 1) ( ) ( ) ( ) ( ) ( ) x t+ =F t x t +G t w t +u t (式 3.31) ( ) ( ) ( ) ( ) ( ) z t =H t x t +v t +b t (式 3.32) 其中, ( )u t 和 ( )b t 分別可一下列算式求得: $ $ ( ) ( ( | ), ) ( ) ( | ) u t = f x t t t −F t x t t (式 3.33) $ $ ( ) ( ( | 1), ) ( ) ( | 1) b t =h x t t− t −H t x t t− (式 3.34) 如此,所求簡化後之線性形式即可直接代入 (式 3.25) 採用一般卡爾曼濾
波理論進行系統狀態之估測。其中必須注意到的是,在計算$( | )x t t 時必須透過 ( ) K t ,由 (式 3.25) 可得知亦即必須透過 ( )H t ,是以 ( )H t 之運算只能藉由前一 時階之預測值$( | 1)x t t− 作為標稱進行線性化,而 ( )F t 則可直接透過$( | )x t t 作為 標稱進行線性化。 透過推廣卡爾曼濾波器之演算,所得x t$( 1| )+ t 、 (p t+1| )t 並非原系統之最 佳 解 , 而 是 近 似 地 表 示 條 件 均 值 和 條 件 協 方 差 矩 陣 , 其 近 似 程 度 取 決 於 $ 2 ( ) ( | ) x t −x t t 和 x t( )−$x t t( | −1)2之大小。
第四章
市區棋盤型路網環境下之交通資訊擷取系統
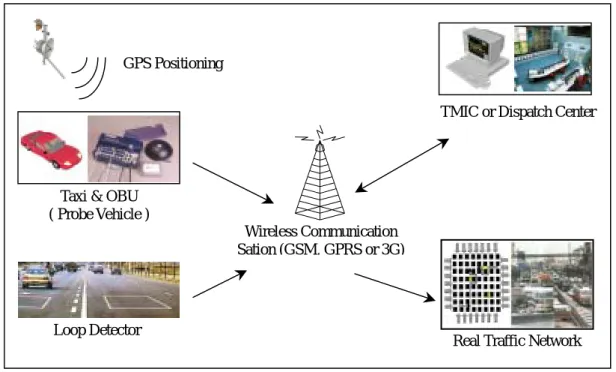
本研究所提出之即時交通資訊擷取系統,主要係針對都市地區路網系統之 設計,系統內涵之考量應可適用於各類的路網形式之下,為本研究將擬以類似 於台北市區道路系統之棋盤型路網進行說明。以本研究所提出之資訊擷取系統 之中包含了主被動交通資訊之蒐集,以下將先行針對本研究所欲施行系統模擬 的路網環境、實體架構進行介紹;其次,分別說明主被動交通資訊擷取系統之 運作機制、資料內容和考量內涵;最後,提出後端資料庫系統的基本架構、資 料表內容以及資料演算流程之設計。 4.1 實體系統架構與路網環境 系統的基本架構主要分為現場的資訓擷取系統與資訊中心的營運兩個部 分,對前者而言並可再分為車載電腦、GPS 定位模組、無線通訊模組為主的車 載單元,以及環狀偵測器為主的路側單元,經過車載電腦簡單的邏輯演算之後, 透過 GSM 或是 GPRS 的無線通訊模組將相關定位暨行車資訊回傳資訊中心; 資訊中心則透過模式庫的演算進行旅行時間之預測,以及動態旅次 OD、交通 流參數之推估。其實體架構圖系如圖 4-1 所示:圖 4-1 系統實體架構圖 而考量現行台北市之路網系統,本研究主要將針對棋盤型 (Grid Network) 之路網形式進行模擬、測試,亦即,將擬以東西向、南北向各十條幹道所形成 之路網環境驗證模式之準確度與可用性。 4.2 即時交通資訊擷取系統 4.2.1 主動交通資訊擷取 考量系統長期營運以及穩定之資料量蒐集,本系統規劃以大眾運輸系統作 為主要之探測車輛來源,然而,以現行台北市之路網系統下,多數主要幹道皆 規劃了公車專用道之佈設,兼以各站上下乘客之停等延滯、車速限制,其實際 之駕駛行為與一般市區車輛相去甚鉅。因此,本系統將以計程車為探測車車隊 之主要組成。
Taxi & OBU ( Probe Vehicle )
GPS Positioning
Loop Detector
Wireless Communication Sation (GSM, GPRS or 3G)
Real Traffic Network TMIC or Dispatch Center
每部計程車上配載的元件主要包含車載電腦、GPS 定位模組、無線通訊模 組,根據模式演算需求,所回傳之資料內容包含了下列各項: 1. 資料有效辨識:藉以判定該筆回傳資料是否為有效。 2. 車輛編號:車輛牌照號碼。 3. 路段編號: 該筆回傳資料所紀錄之車輛行經路段。而編碼方式係配合中華顧問 工程公司所規劃之新版台北市道路編碼原則,以 GIS 座標系統為基礎的 二度分帶點座標為編碼依據。先進行編碼範圍之區塊與圖層劃分,再依 照區塊碼與位置碼定義路口的編碼,其細部原則如下: 界定編碼範圍,將整個台北地區面積包含於一個區塊中,整個區塊 依照市中心區與非市中心區的差別去劃分細小的區塊,市中心區部分劃 分的區塊較小,非市中心區部分劃分的區塊較大。而市區道路系統之路 口編碼方式如下: (1) 資料型態長度:char (4) (2) 編碼結構 M1 M2 N1 N2 (3) 說明 M1:所在區塊之垂直向編號 值域 0∼9、A∼Z(不含英文字母 O) M2:區塊內之垂直向位置碼 值域 A∼Z(不含英文字母 O) N1:所在區塊之水平向編號(值域同 M1)
N2:區塊內之水平向位置碼(值域同 M2) 依此法建立各路口編碼之後,以兩個路口節點即可決定該路段之編碼, 如 圖 4-2 所 示 , 由 路 口 AJKH 往 路 口 AJKM 的 路 段 編 號 即 為 AJKH-AJKM;反向則為 AJKM-AJKH。 圖 4-2 路段編碼示意圖 4. 資料回傳時間。 5. 路段旅行時間:車輛行經資料回傳路段之旅行時間。 6. 路口轉向型態: 通過一路段之上下游路口之車流包含了左轉、右轉和直行通過三種 模式。而對於單一車輛,其通過路段上下游路口則可以有九種轉向模式 的組合,譬如:右轉進入-左轉離開、直行進入-右轉離開等等。此一項 即紀錄車輛所屬之路口轉向行為。
資料回傳模式並可透過圖 4-3 予以說明。途中之箭號代表一某探測車經過 兩個十字交叉路口之行徑,兩個路口皆分別以 GPS 座標定義出圖上所示之陰影 區塊,當車輛通過此兩路口之間的 A-B 路段,在圖上的 a 點,車載單元則透過 GPS 儀所接收之定位值與車機記載之陰影區塊座標進行比對,紀錄下車輛進入 A-B 路段時間;在b點,透過同樣方式判定車輛離開 A-B 路段時間,並在此刻 回傳車輛通過 A-B 路段之上述相關資料。 圖 4-3 資料回傳模式示意圖 4.2.2 被動交通資訊擷取 被動交通資訊之擷取主要是謂透過固定之偵測設備對於特定位置之交通狀 態進行定點之量測。本研究所規劃之實體架構之中,係擬以環狀線圈偵測器對 於路口車流進行觀測,所蒐集的資料主要有各路段交通流量和路口轉向流量兩 項。 1. 路段交通流量: 環路線圈偵測器整個系統可分成三大部分 (ITE,1991):控制箱內 的電子單元、導入線,及埋在鋪面下之一圈或一圈以上的金屬絕緣線 Junction A Junction B a b
路,系統之示意圖如圖 4-4 所示。 圖 4-4 環路線圈偵測系統示意圖 偵測器上的電子單位透過頻率在 10kHz 至 200kHz 內的信號供給環 路系統能量 (林豐福等,1996;ITE,1991)。當車輛通過或停留在線圈 上時,將降低其電感量,使其送出一脈衝波至控制箱,以示偵得車輛的 出現或通過,之後再藉由脈衝波形的不同來辨識經過車輛的種類,同時 可利用車輛通過兩組環路線圈的時間差,求得車速或車長。線圈部分的 設計有幾種選擇,一為將一圈或一圈以上的金屬線,置入由封膠劑填滿 鋪面的切割鋸槽中,另一為在線圈置入鋪面上的切割鋸槽前,先將線圈 置入塑膠筒中。環路線圈埋設於車道下,其大小、形狀及幾何佈設方式 會隨著使用目的的不同而改變,多介於 1.8 m×1.8 m 至 1.8 m×12-21 m 之間。正因其在設計上之彈性,故其在偵測車輛的適用範圍最廣,加上 精確度高,是目前應用最廣泛的偵測器,但受道路鋪面施工,或路基移 位等影響,該類偵測器常有維護不及之困擾,導致偵測系統功能之喪失。 當偵測器成功辨識通過道路上某一點的移動車輛時,會將資料傳送 到交通號誌控制器或其他交通設施,並更新車流資料。依物理變量的量 測,環路線圈來量測車輛通過感測區與否,操作上利用車輛壓過線圈 時,因車體引起磁其偵測方式可分為兩種,一為通過 (passage) 偵測, 即利用兩個或兩個以上的環路線圈,量測車輛通過感測區的時間,可識 車輛經過 之電流改變 環路線 圈感應 手孔 導入線 控制箱 電子單元處理 輸出
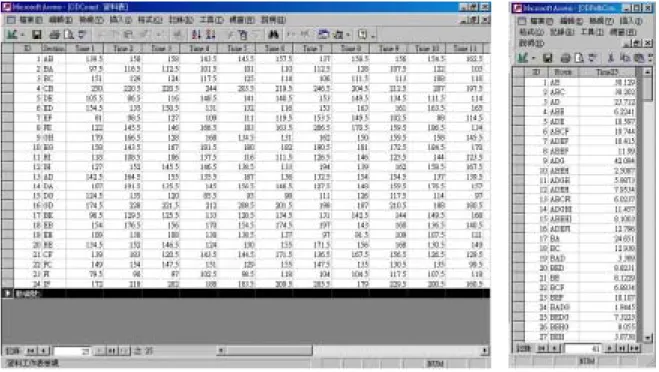
別車輛行進的方向與通過數。但當車流可能出現緩慢移動或停等在觸動 式號誌化交叉路口的情形時,則可使用出像 (presence) 偵測,利用單 一通量變化而輸出不同強度之波形訊號後,計算車輛出現的次數。 2. 路口轉向流量 在路口轉向流量部分,依現行技術,除非透過影像偵測器,一般環 狀偵測器並無法有效測得轉向之車流量,然而大規模之影像偵測器佈設 成本過高,是以本研究所提出之系統中將擬透過靜態之路口車流轉項資 料調查,取得路口各車道車流左右轉及直行之車流比例。運作時則以路 段各車道車流量乘上此一比例以求得各路口之轉向車流量。 4.3 資料庫系統與模式演算架構 資料庫系統主要分為動態演算資料表和資料倉庫兩部分。動態演算資料表 之內容係隨著每一時階系統所接收之即時車流資訊更新,並只保留最近一次遞 迴演算所需之資料,依本研究所構建之模組功能又分為「路段旅行時間預測」 和「動態旅次 OD 推估」的相關所屬資料表,其欄位內容分別如圖 4-6、圖 4-7 所示 圖 4-6 資料表命名為 TraveltimePredict,第一欄 ID 為資料表中每一筆資料 的索引序號;NodeA 和 NodeB 分別為路段上下游路口節點之編號,透過這樣 的資料欄位表示,演算中欲取得之於路段上游節點的相鄰路段資料,以表中 AJKH-AJKM 路段為例,只需對於 NodeB 欄位搜尋欄位內容為 AJKH 的資料 即可 (圖中路口節點編號暫以自行定義者代替);Time n 欄位則是記錄了各路 段從前 N 個時階至當前時階所偵測探測車於各路段之平均旅行時間。
圖 4-5 路段旅行時間預測表欄位內容
圖 4-6 旅次 OD 推估分區流量表欄位內容 (左圖為路段流量;右圖則為路徑流量)
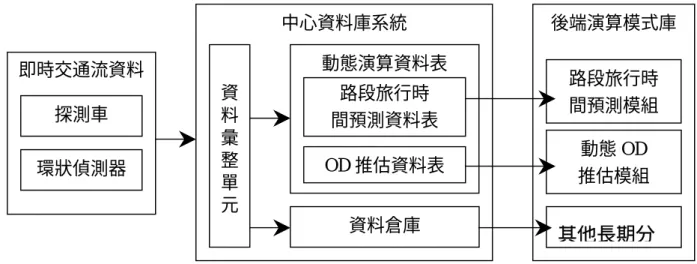
圖 4-6 左圖資料表命名為 ODCount,其中,ID 為資料表中每一筆資料的 索引序號;Section 紀錄路網下為路網下每一對交通分區車流標號;Time n 則 是儲存對應時間下之交通分區車流,可透過環狀偵測器求得,圖 4-6 右圖則 為預測時段之路徑車流量,如圖中所示第 6 筆資料即為由交通分區編號 A 至 F 的 OD 對中的路徑 A-B-C-F 旅次在該預測時段之車流量。 各車輛所與偵測器所回傳之即時交通流資料透過中心程式之匯整即以上 述之格式匯入資料表,以進行後續功能模組之遞迴演算。 相較於動態演算資料表中心接收資料覆蓋過舊有資料,資料倉庫中則是 累積歷史資料之存入,俟一定的資料量累積之後,逕行較長期之分析。資料 庫系統與模式演算之關係如圖 4-7 所示。 圖 4-7 資料庫系統與模式演算架構圖 即時交通流資料 探測車 環狀偵測器 中心資料庫系統 資 料 彙 整 單 元 動態演算資料表 資料倉庫 路段旅行時 間預測資料表 OD 推估資料表 後端演算模式庫 路段旅行時 間預測模組 動態 OD 推估模組 其他長期分
第五章 市區棋盤型路網環境下動態旅行時間預測
與旅次
OD 推估模式之建立
根據前章所規劃之資料擷取系統,基於相關資料內容,本章將擬構建一數 學模式以對於此一市區棋盤型路網系統進行描述。第一小節為動態旅行時間預 測模式之建構,主要係根據 Jarjees & Drane (1997) 所提出之公車旅行時間預測 方法再加入路口轉向車流之考量所得,並以最小平方遞迴估測方法進行系統狀 態之推估、預測車輛於各路段之旅行時間。第二小節部分,則是假設可靠之動 態流量指派模式存在,並以前一小前所求得之路段旅行時間作為指派模式中指 派參數之成本項,將路網下之旅次推估系統以系統狀態方程式和觀測式表示, 以卡曼濾波器對於路徑選擇參數進行推估,進而求得動態旅次 OD。 5.1 動態旅行時間預測模式 對於旅行時間的預測,在 ITS 的發展當中一直是為相當重要的研究重點, 以往的研究之中,探測車技術普遍應用於高速公路系統之旅行時間預測。對於 市區道路系統,相關研究則多限於單一路段或是通過數個號誌路口的單一幹道 上旅行時間之預測、分析,實證測試之結果多呈現了顯著的成效。然而,對於 都市地區複數道路之交織或是規模較大之路網系統則仍舊少有進一步之探討。 是以,本研究將擬建構一數學模式和可行之演算流程,得以透過前一章所述資 料擷取系統之資料蒐集,對於都市地區路網之下,各路段車流行為、延滯關係, 進行廣泛之描述和預測。 在 Jarjee & Drane 的公車旅行時間預測模式中,主要透過時間序列與空間 影響的概念,對於公車 A 在某一站距 B 之旅行時間,係以前 N 班車輛通過站 距 B 之旅行時間以及公車 A 通過站距 B 之前 M 個路段的旅行時間為背景數據,
建立修正型之線性旅行時間預測模式 (式 5.1a)。 1 1 1 1 v i S d v i v v v i v i s d s d s d s s v v i N s s d M T α t β t e − + + + = − = − =
∑
( ) × +∑
( ) × + ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) (式 5.1a) 符號標示之內容如下表所列: v s T 車輛v 通過路段 s 的旅行時間預測值; v s T 車輛v 通過路段 s 的旅行時間; N 模式演算中所採用之時間記憶長度; M 模式演算中所採用之影響路段個數; , v v s s α β 模式參數; , ( ) v v i i 表車輛 v 之發車順序,v(i-1)表示較 v(i)先前一班發出之車輛; , ( ) s s d d 表公車路線上之路段編號順序;s(d-1)表示公車路線上在 s(d) 的前一個路段; e 系統殘差項; 其中, v i v v s d s d v v i N T α = − ×∑
( ) ( ) ( ) ( ) 係反應模式中對於所預測路段s(d) 反應在平均旅行 時間之路段特性; 1 1 1 S d v i v i s s s s d M T β − + + = − ×∑
( ) ( ) ( ) ( ) 項則是反應車輛 v(i+1) 之車輛行駛通過 路段s(d) 至 s(d+1) 之駕駛特性。 市區路網下之車流,基於車輛路徑選擇與路口轉向之隨機性,本研究對於 s(d) s(d-1) s(d-2) s(d+1) s(d-M)….v(i) v(i-1) ……v(i-M)
![圖 3-3 「一階預測值」的卡爾曼濾波求解示意 而在濾波估計值得求解方法之中,在假設系統初始狀態值 (0) x 為已知的條 件下,時階 t 的「濾波推估值」及其誤差共變異矩陣可經由下列關係式求解, 其求解關係則如圖 3-4 所示: $ ( | ) $ ( | 1) ( )[ ( ) ( ) ( |$ 1)] x t t = x t t − + K t z t − h t x t t − (式 3.22) ( | ) (](https://thumb-ap.123doks.com/thumbv2/9libinfo/8855965.243784/34.892.120.791.110.307/一階預估值及其誤差共變異矩陣可經由下列關係其求係則+|.webp)