A Pilot Study of Inertial Sensor Node Based on
Wireless Sensor Network for Activity Recognition on
Rehabilitation Exercise of Frozen Shoulder
K. Lee
Department of Communications Engineering Yuan Ze University
Chung-Li Taiwan [email protected]
Y.-C. Kan
Department of Communications Engineering Yuan Ze University
Chung-Li Taiwan [email protected]
H.-C. Lin
Health Risk Management Department China Medical University
Taichung Taiwan [email protected]
S.-Y. Chiang
Department of Information and Telecommunications Engineering
Ming Chuan University Gui-Shan Taiwan [email protected]
Abstract—This study establishes wireless sensor network (WSN)
inertial sensor nodes that comprise micro control unit, ZigBee-compatible radio frequency chip, tri-axial accelerometer, biaxial gyroscope, and planar inverse F type antenna on the four-layer printable circuit board by 40mm x 37mm x 2mm. The sensor is wearable for measuring inertia motion nodes of human body because of TinyOS-embedded codes for signal transportation between both inertial and receiver nodes. At the backend server, a Matlab-based program is developed for retrieving and parsing packets via serial ports to recognize motion data based on the artificial neural network (ANN) algorithm. Therefore, six rehabilitation exercises for frozen shoulder illness can be measured by wearing two nodes on the wrist and the arm. Acceleration components in three axes can be formed as vectors in which additional included angle sets can be derived for necessary motor features of recognition algorithm. As results, five of six exercises are successfully recognized with 85-90% of accuracy rates but the complex one (i.e. the spiral rotation exercise) reached only around 60%. The pilot study approves good feasibility of self-developed WSN inertial sensor nodes to recognize rehabilitation exercises as well as contribute advanced applications for mobile or ubiquitous health care in the future.
Keywords—WSN, inertial sensor node, frozen shoulder, ANN, rehabilitation activity, mobile or ubiquitous health care
I. INTRODUCTION
Rapid technical advances in integrated circuits (IC), micro-electro-mechanical systems (MEMS), radio frequency (RF), and wireless sensor networks (WSNs) [1] are enabling equipments with long durability, low power, and mobile capacities to detect various physiological signals of patients for
ubiquitously communicating health care information with clinical data of hospital [2]. The mobile or ubiquitous health care (m-health or UHC) typically requires routine monitoring on human body for obtaining biomedical data, particularly non-invasive measurement by using electrocardiography (ECG), sphygmomanometer, pulse oximeter, glucose meter, physical rehabilitation facilities and so on [3][4]. However, self rehabilitation at home usually decreases expectable effects with respect to that in hospital because physiotherapists cannot give instantaneous advices for adjusting incorrect movements. Thus, the equipments with implementation in remote monitoring on self rehabilitation, besides of privacy concern, can assist the physiotherapist realize and analyze patient’s activities as well as respond necessary comments beyond the therapy design. In this study, we establish the inertial sensor [5] that is compatible with ZigBee protocol to detect accelerations and angular velocities of human body motion in three directions while making up-limb activities required by frozen shoulder rehabilitation. The algorithm based on artificial neural network (ANN) is further proposed in activity data recognition to generate patterns for other rehabilitation programs. In this paper, the configuration of WSN inertial sensor node is described in next section follower by ANN methodology for recognizing the specific rehabilitation motions of frozen shoulder. Finally, results of practice will be discussed while several important conclusions will be highlighted.
II. DEVELOPMENT OF WSNINERTIA SENSOR NODE
The proposed WSN inertial sensor node consists of micro control unit (MCU), radio frequency (RF) chip, printable inverse F type antenna, and MEMS-based analog devices (AD)
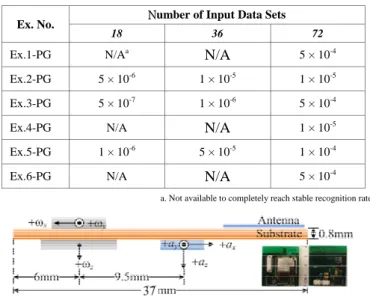
including tri-axial accelerometer, bi-axial and uni-axial gyroscope, low dropout voltage (LDO) chips. The configuration of design on the four-layer printable circuit board (PCB) is shown in Fig.1, in which the dimension of node is 40mm × 37mm × 2mm excluding a rechargeable battery (approximate in 4mm thickness). As the initial status in practice, the acceleration and angular velocity are both directed in negative x-axis. There are eleven channels counted in wireless communication bands ranged from 2.4GHz to 2.48GHz. The antenna is modulated by resistance due to ground element for reducing the reflection loss less than 10dB. The sensor can be simply fixed on the body by glue tape. As measurement, this design requests the upward antenna and pads the battery on skin for enough distance as wearing the device because interaction between wave and human body will reduce antenna efficiency. The practical test shows that wireless transmission loss of WSN packets can be apparently eliminated.
The firmware is programmed by nesC and is installed in the TinyOS-embedded device [6]. The measured data of accelerometer and gyroscope are packed by analog to digital conversion (ADC), thus the RF chip can deliver the packets to the receiver. Herein, the original sensor data are randomly distributed by the number of times for 128 ADC counts per 1/1024 seconds. Thus a histogram of probability density function (PDF) versus ADC count performs Gaussian distribution and the mean value can be determined as expected acceleration (ax, ay, az) or angular velocity (ωx, ωy, ωz) for data
conversion. Fig.2 shows the format of packet such as the header and footer of physics, MAC layer as well as the application payload which includes required kinetic parameters (i.e. (ax, ay, az) and (ωx, ωy, ωz)) and other information (e.g.
temperature, voltage, time, etc.). In the practice, prior to sending the data to the receiver through the specified serial port, the base node (BN) receives 8 packets per second and parses data based on the payload. Additionally, the program will retrieve necessary data by dropping out headers, footers, and invalid 16-bit CRC or incomplete format. Finally, the MatlabTM toolbox at server side can obtain pure motion data for recognition.
III. RECOGNITION FOR REHABILITATION EXERCISES
A frozen shoulder is medically referred to as adhesive capsulitis which causes a shoulder joint with significant limitation of its range of motion in all directions. The patients are usually assigned by repeating rehabilitation activities due to physical therapy and therapeutic medicine. According to the therapy, common frozen shoulder release exercises for rehabilitation was adopted in this study as below: (Ex.1) Scapula exercise – make shoulder flexion with elbow extension by arm up and down, (Ex.2) Codman's pendulum exercise – hang the arm straight forward with the shoulder blade relaxed and swing the arm in small circles with 15-30 degrees from vertical, (Ex.3) Finger wall-climbing exercise – walk fingers up the wall by climbing as high as possible, (Ex.4) Spiral rotation exercise – rotate hands in supination from front to rear, (Ex.5) Back shoulder circling exercise – rotate arms on the back clockwise or counterclockwise, and (Ex.6) Towel exercise – enhance the range of motion for shoulder internal rotation [7].
It is available for the proposed wearable sensors to collect data for recognizing acceleration and angular velocity of the specific motor part because the patient should repeat the same activity periodically. As measuring the data, the user can wear the WSN nodes approximately on the upper arm and the wrist, say node 1 and 2, respectively. As shown in Fig.3, it is suggested to fix the node 1 on the outside of the upper arm with 4-finger width above the elbow joint, and fix the node 2 on the inside of the lower arm with 4-finger width above the wrist. The nodes can hence return packets which involve measured data of limb motions and the data are counted in voltage values. With ADC calculation, the components of acceleration and angular velocity in 3 axes can be easily carried out.
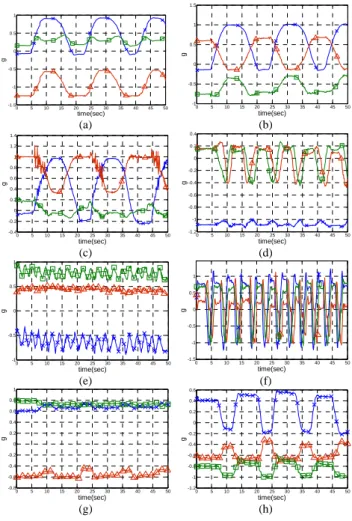
The observed signal shapes of six rehabilitation exercises can be categorized into eight sub portions as shown in Fig. 4(a)-(h) for requirement of recognition: (a) Node 1 for Ex.1 performs acceleration of two axes by separated curves in large vibration while the rest one is in slight vibration but overlapped with other large one; (b) Node 2 for Ex.1 performs acceleration of two axes by overlapped curves in large vibration while the rest one is in small vibration; (c) Node 2 for Ex.3 performs acceleration of three axes by pair-overlapped curves; (d) Node 2 for Ex.2 performs an acceleration curve in small vibration with respect to other two overlapped curves; (e) Node 2 for Ex.5 performs acceleration curves in small vibration with respect to that for Ex.2; (f) Node 2 for Ex.4 perform acceleration curves in strong vibration (i.e. variation in steep slope); (g) Node 1 for Ex.6 performs acceleration curves with small vibration (i.e. the upper arms move steadily); (h) Node 2 for Ex.6 performs independent acceleration curves in stepwise-shape vibration. The characteristics above, particular the data by node 2, can help finding features required by the proposed recognition algorithm.
The back propagation neural network (BPNN) algorithm [8] is implemented for recognition on the assigned rehabilitation exercises. The BPNN involves three layers: an input layer for n input features, a hidden layer adopted from the input layer for l neurons, and an output layer for m output data. In which, by using MatlabTM toolbox, a log sigmoid function is adopted as a transfer function inside the hidden layer to restrict the output range between 0 and 1 while a linear function is selected for the output layer to obtain recognized movements. For the input layer, we use the data measured per 25 seconds as a data group and each data set has overlapped groups. For example, 1) the first data set contains the data measured in the initial 25 seconds; 2) the second data set consists of the last 1/4 data of the first set and the first 3/4 data of the next group; 3) the third data set is made of the last half of the first group and the first half of the second group; 4) the fourth data set has the last 1/4 data of the first group and the first 3/4 data of the second group; then, a cycle is complete for the first two groups and the same cycle is propagated to the second and third groups, and so on. In addition, included angles derived by (ax, ay, az) vectors at
each moment and initial time are given to input data. Therefore, we use 800 entries for the input layer (i.e. 25×8×(3+1)=800,
n=800), 5 neurons for the hidden layer (l=5), and 1 neuron for
Furthermore, we consider a cross validation method for necessary training procedure to solve the problem in over fitting. All entries for the training procedure are classified by training data set, validation data set, and testing data set. In the beginning of flow chart, the training data set is employed to construct the primary network for training; then, the validation data set is inducted to evaluate mean square errors (MSEs) of the network to avoid over fitting. If the MSE of the training data is decreasing but that of validation data is increasing, then the over fitting condition occurs and the training procedure will be stopped. For this condition, the training data set must be reorganized to repeat the learning procedure. Finally, once the proper weight is learned, the testing data set is substituted to calculate MSE of data set and perform the tolerance of network corresponding to the new data. The given weigh is the ANN weight to achieve the prospective scope of training procedure and will become the weight value for recognition.
IV. RESULTS AND DISCUSSION
In this study, we setup the training procedure to begin with learning for the successful rate of recognition with respect to the input data set and the performance goal (PG). As mentioned in previous section, we have four features (i.e. accelerations in three axes and the included angle of continuous acceleration vectors, (ax, ay, az, θ)) which involve 200 data for
each feature so that 800 data are counted for a data set. Each motion of the exercises contains 18, 36, and 72 data sets for input in series, thus the total number of recognition data for each motion is more than 150.
Theoretically, the smaller PG value performs a stable rate of recognition but longer convergence time is required, even the prospective scope of training procedure could not be perfectly reached. For example as shown in Fig.4, the Ex.2 displays an easily recognizable curve group (i.e. the features are quite different) which presents 96% of recognition rate for 18 input data sets versus PG<5×10-6, and 98% for both 36 and 72 input data sets versus PG<1×10-5. However, the training procedure probably is not perfectly completed while the PG is setup to 5×10-7 for both 36 and 72 input data sets. It implies that few training data require small PG for good recognition rate. We hence consider three continuous PGs for training to reach the stable recognition rate that the convergent tolerance is less than 5%. Table I lists the relationship of PGs of six exercises and number of input data. It is observed that recognition for Ex.2, 3, and 5 can reach a stable rate due to 3 kinds of input data sets; thus that for Ex.1, 4, and 6 requires 72 input data sets to obtain the similar approach. According to the practice above, we suggest 72 input data sets (i.e. 72×800 data) with condition of PG<1×10-5 for training the network to recognized the assigned six exercises.
In this study, the proposed BPNN algorithm can recognize the rehabilitation exercises by approximate 95% and 85% of successful rates for Ex.1, 2, 4, and 5, 6, respectively. However, the recognition rate of Ex.3 is only around 60% for different number of input data sets (i.e., 18, 36, and 72) though the PG value (1×10-5) can satisfy the stable condition by using 72 input data sets for training. Obviously, the adopted four features do not provide enough information for training network to recognize the complicated spiral rotation exercise that contains
a full range of spiral rotation of joints of hands, wrists, elbows, and shoulders with more angle variations relative to other five exercises. This exercise hence requests more features for better training and recognition. For instance, the frequency of angle variation can be engaged into the feature set, i.e. (ax, ay, az, θ, f);
or, the angular velocity in three axes can also be candidate features of rotating motions.
V. CONCLUSION REMARKS
This pilot study implements the self-developed WSN-based inertial sensor nodes to measure and recognize six rehabilitation exercises for the frozen shoulder therapy. The study applies the algorithm of artificial neural network for analyzing WSN data and finding proper features to progress the training procedure. The results perform good recognition rates above 85% up to 95% for the proposed exercises except of the spiral rotation exercise which involve complicated motions with full range of spiral rotation of joints. More features, such as frequency of angle variation and components of angular velocity, are suggested to be considered as the input data for the ANN training in the future. Furthermore, the number of neurons for the hidden layer can be adjusted for application of instantaneous activity recognition.
TABLE I. PERFORMANCE GOAL (PG) OF EACH EXERCISE TO STABLE RECOGNITION RATE FOR DIFFERENT NUMBER OF INPUT DATA SETS
Ex. No. Number of Input Data Sets
18 36 72
Ex.1-PG N/Aa
N/A 5 × 10-4
Ex.2-PG 5 × 10-6 1 × 10-5 1 × 10-5 Ex.3-PG 5 × 10-7 1 × 10-6 5 × 10-4
Ex.4-PG N/A N/A 1 × 10-5
Ex.5-PG 1 × 10-6 5 × 10-5 1 × 10-4
Ex.6-PG N/A N/A 5 × 10-4
a. Not available to completely reach stable recognition rate
Figure 1. Configuration of WSN inertial sensor node components
Figure 2. Payload format of a WSN packet for inertial sensor node
Figure 3. Portions of the arm for wearing inertial sensor node: (a) node 1 at upper arm, (b) node 2 at wrist
Figure 4. Variation of acceleration signals measured by inertial sensor nodes for different exercises: (a) node 1 for Ex.1, (b) node 2 for Ex.1, (c) node 2 for Ex.3, (d) node 2 for Ex.2, (e) node 2 for Ex.5, (f) node 2 for Ex.4, (g) node 1
for Ex.6, (f) node 2 for Ex.6.
Figure 5. Recognition rate of Ex.2 due to different kinds of input data sets: blue (left) bar: 18 sets, green (middle) bar: 36 sets, red (right) bar: 72 sets
Figure 6. Recognition rates of Ex.4 due to different kinds of input data sets – blue (left) bar: 18 sets, green (middle) bar: 36 sets, red (right) bar: 72 sets.
REFERENCES
[1] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci, “Wireless sensor networks: a survey,” Computer Networks, vol.38, no.4, pp.393-422, 2002.
[2] C.S. Pattichis, E. Kyriacou, S. Voskarides, M.S. Pattichis, R. Istepanian, C.N. Schizas, “Wireless Telemedicine Systems: An Overview,” IEEE Antennas & Propagation Magazine, Vol.44, No.2, pp 143-153, 2002. [3] G.G. Mendoza, B.Q. Tran, “In-home wireless monitoring of
physiological data for heart failure patients,” in Proc. of 24th Annual Conference and the Annual Fall Meeting of the Biomedical Engineering Society, Huston, Texas, Vol. 3, pp. 1849- 1850, Oct. 2002
[4] R. Isais, K. Nguyen, G. Perez, R. Rubio, H. Nazeran, “A low-cost microcontroller-based wireless ECG-blood pressure telemonitor for home care,” Engineering in Medicine and Biology Society (EMBS), in Proc. of the 25th Annual International Conference of the IEEE, Cancun, Mexico, 17-21 Sept. 2003, Vol. 4, pp. 3157- 3160.
[5] Y.-C. Kan and C.-K. Chen, "A Wearable Inertial Sensor Node for Body Motion Analysis," IEEE Sensor Journal, vol. 12, no. 3, pp.651-657, March 2012.
[6] TinyOS Community, TinyOS Documentation Wiki, [Available online]: http://docs.tinyos.net/tinywiki/index.php/Main_Page.
[7] P.M. Davies, “Steps to Follow: The Comprehensive Treatment of Patients With Hemiplegia,” 2nd Ed. Springer-Verlag, New York, 2000. [8] I. Aleksander, H. Morton, "An introduction to neural computing,"
International Thomson Computer Press, 1995.
(a) (b) 0 5 10 15 20 25 30 35 40 45 50 -1.5 -1 -0.5 0 0.5 1 time(sec) g 0 5 10 15 20 25 30 35 40 45 50 -1 -0.5 0 0.5 1 1.5 time(sec) g (a) (b) 0 5 10 15 20 25 30 35 40 45 50 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 time(sec) g 0 5 10 15 20 25 30 35 40 45 50 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 time(sec) g (c) (d) 0 5 10 15 20 25 30 35 40 45 50 -1 -0.5 0 0.5 1 time(sec) g 0 5 10 15 20 25 30 35 40 45 50 -1.5 -1 -0.5 0 0.5 1 time(sec) g (e) (f) 0 5 10 15 20 25 30 35 40 45 50 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 time(sec) g 0 5 10 15 20 25 30 35 40 45 50 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 time(sec) g (g) (h)
5e-2 1e-2 5e-3 1e-3 5e-4 1e-4 5e-5 1e-5 5e-6 1e-6 5e-7 1e-7 0 20 40 60 80 100 Performance goal(MSE) R e c o g n itio n r a te (% )
![[102-2] WNFA lab4 - A Tiny Wireless Sensor Network](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)