國立高雄大學資訊管理學系碩士班
碩士論文
以專家系統建構
小型無人飛行載具自動巡弋控制之研究
An Auto-pilot Unmanned Aerial Vehicle System
Based on Expert System
研究生:卓佳君 撰
指導教授:蕭漢威 博士
以專家系統建構
小型無人飛行載具自動巡弋控制之研究
指導教授:蕭漢威 博士 國立高雄大學 資訊管理學系 學生:卓佳君 國立高雄大學 資訊管理學系摘要
無人飛行載具(Unmanned Aerial Vehicle, UAV)是指無需駕駛員於機艙內駕駛, 而是藉由遠端遙控或自動駕駛技術控制飛航,進行科學觀測、現場偵測等任務的 飛行載具。近年因無人飛行載具的關鍵元件,如陀螺儀(Gyroscope)、電子羅盤 (E-Compass)、全球定位系統(Global Positioning System, GPS)等元件的製造成本大 幅降低,也有許多以開放式原始碼資源(Open Source)為基礎的飛行控制程式碼被 大量釋出,結合小型無人飛行載具較不受場地起降設備的限制等各項優勢,使得 小型無人飛行載具開始廣泛的被利用於各個不同的應用領域,例如:地理資訊的 蒐集與分析、三維地形建模、目標監測的辨識技術、緊急災難的觀測與救援等, 無人飛行載具逐漸成為各界所重視的發展方向。 就當前無人飛行載具的應用層面發展而言,無人飛行載具未來將著重於執行 長時間與長距離的飛行任務,例如:大範圍的災區勘察、環境變遷監測等,然而 飛行員培訓不易且養成成本極高,除此之外,長時間的精神專注與機械的精密操 控是人類精神所無法負荷的壓力,因此以自動化的飛行監測技術協助無人飛行載 具之飛行操控人員己成為必然的趨勢。因此本研究將提出以專家系統(Expert System)建置適用於無人飛行載具的自動巡弋控制系統,目的在於使無人飛行載 具能如同飛行員般根據外在條件及任務條件,與專家系統的知識庫進行比對後, 自動推理出對應的操作控制。且以自動化的方式協助人為操控載具亦可降低人力 成本,以及因人為操控失誤所產生重大損失的機率。 關鍵字:無人飛行載具、專家系統、自動控制、自動飛行控制
An Auto-pilot Unmanned Aerial Vehicle System
Based on Expert System
Advisor: Dr. Han-Wei Hsiao Department of Information Management
National University of Kaohsiung
Student: Chia-Chun Cho
Department of Information Management National University of Kaohsiung
Abstract
Unmanned Aerial Vehicles (UAVs) controlled not by human pilot but auto-pilot systems to monitoring or survey an area. In recent years, manufacture cost of important mechanical parts of UAVs are declining, such as gyroscopes, e-compasses, Global Positioning System (GPS) antennas. In addition, open software and hardware sources about UAVs controlling are released. Besides, small UAVs are less restrictive to landing fields. As the result, small UAVs are applied to many ways like geography data collection, 3D geography model building, target monitoring, disaster rescue and monitoring.
UAVs application development will focus on long-time and long-distance flying mission in the future, such as large scale disaster monitoring, environment changing monitoring. But pilots’ training is difficult and cost too much. Also people are not capable of long-time focusing on operating machine controlling. So auto-pilot system are must be developed to replace human pilots. This research proposes an auto-pilot unmanned air vehicle system based on Expert System. The aim is to make UAVs act are able to acting like a human pilot adjusting flying state based on rules base’s rules. Also we expect the auto-pilot unmanned air vehicle system can decline human pilots training costs and human operation mistake.
Key words: Unmanned Air Vehicle, UAV, Expert System, Auto Controlling,
目錄
第一章 緒論... 5 第一節 研究背景... 5 第二節 研究動機... 7 第三節 研究目的... 8 第二章 文獻探討... 9 第一節 專家系統相關研究... 9 第二節 無人飛行載具應用相關研究... 11 第三節 以專家系統建置無人飛行載具自動巡弋控制應用的相關研究... 13 第三章 無人飛行載具專家系統建置... 14 第一節 無人飛行載具自動巡弋系統架構... 15 第二節 定翼機無人飛行載具與通訊協定介紹... 16 第三節 飛行控制專家系統架構... 22 第四節 專家系統規則庫... 23 第五節 開放式架構之遠端地面控制站... 25 第四章 實證與評估... 27 第一節 實證方法... 27 第二節 實驗結果... 30 第五章 結論與未來研究方向... 36 第一節 結論... 36 第二節 研究限制... 37 第三節 未來研究方向... 37 參考文獻... 39圖目錄
圖 1. Facebook 開發之無人飛機 Aquila ... 8 圖 2 無人飛行載具專家系統架構圖... 15 圖 3 旋翼機與定翼機無人飛行載具... 16 圖 4 定翼機操控舵片配置... 18 圖 5 飛行姿態屬性示意圖... 18 圖 6 單機版電腦 Raspberry Pi ... 23 圖 7 MAVProxy 終端介面 ... 25 圖 8 Mission Planner 地面監測站 ... 26 圖 9 飛行路徑規劃腳本... 28圖 10 以 Google Earth 開啟飛行紀錄檔(ArduPlane AUTO 模式降落模擬) ... 29
圖 11 以 Google Earth 開啟飛行紀錄檔(專家系統降落模擬) ... 29 圖 12 Log Browser 分析飛行記錄檔... 30 圖 13 自動降落過程之水平移動距離... 31 圖 14 自動降落過程之高度變化... 32 圖 15 自動降落過程之水平移動速度變化... 33 圖 16 自動降落過程之垂直速度變化... 34
表目錄
表 1 無人飛行載具相關應用領域與實例... 7 表 2 MAVLink 傳輸數據(節錄) ... 20第一章 緒論
無人飛行載具隨著技術門檻的降低,逐漸成為熱門的應用科技。早期無人飛 行載具的技術掌握於軍方,僅為軍事所用,技術困難且所需硬體設備造價高又不 易取得。近年來不僅無人飛行載具程式開發技術逐漸成熟,並以開放式自由軟體 釋出,硬體設備方面亦精簡化,使其技術更趨成熟且關鍵零組件的製造成本降低, 一般社會大眾也可負擔此開銷,無人飛行載具因而成為各行各業廣泛的應用科技。 本研究預計利用專家系統自動推理和控制的技術發展一套適用於小型無人飛行 載具之自動巡弋控制系統,本章節將針對無人飛行載具的未來發展,以及本研究 的技術開發之重要性分別進行說明。第一節 研究背景
無人飛行載具或稱無人機、無人飛機,所指的是飛行載具無需駕駛人員於飛 機駕駛艙內控制,而是藉由遠端遙控或透過自動駕駛技術控制飛航,進行科學觀 測與實地偵查等任務的飛行載具。經由多年的研發與改良使得無人飛行載具飛行 技術的製造門檻降低,加之近年相關技術的開放原始碼大量釋出,已有越來越多 的研究投入無人飛行載具領域,更促進了無人飛行載具於不同領域的發展與應用。 以下說明無人飛行載具的前景與發展。 (1) 商業市場趨勢Global Information, Inc. 於 2012 年市場調查報告[3]指出:全球無人飛行載具 的支出,2009 年已達到 51 億美元,並評估 2010 至 2020 年預測期間之無人飛行 載具市場,將累積約 710 億美元。另外,根據 Market And Market 於 2016 年提出 的市場調查報告書表示,全球無人飛行載具的市場規模將從 2016 年的 132 億 2000 萬美元,於 2022 年成長至 282 億 7000 萬美元,而其中主要推動無人飛行 載具市場成長的因素包括商業用途的需求增加,無人飛行載具的技術進步以及各
國的國防預算增列等。
(2) 無人飛行載具相關技術的發展
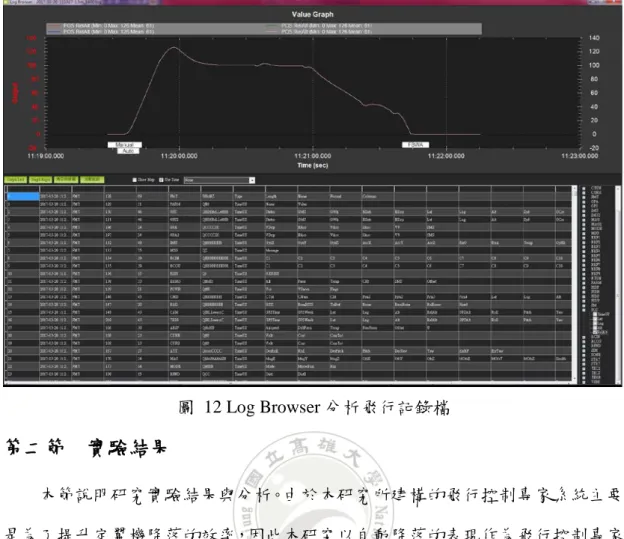
關於無人飛行載具相關的開放原始碼計劃日益興盛,著力開發項目包含:飛 行控制硬體之 APM (ArduPilot Mega) [5]、Open Pilot [39]等小型飛行控制電路模 組 , 與 飛 行 控 制 軟 體 相 關 的 有 地 面 控 制 站 (Ground Control Center, GCS) 之 MAVProxy、Mission Planner、Q Ground Control 和專門應用於小型無人飛行載具 使用的通訊協定 MAVLink (Micro Air Vehicle Link Protocol)等各項無人飛行載具 相關的各項技術在近年來都有大幅的成長,可預期以開放原始碼發展無人飛行載 具與相關研究將成為未來重要趨勢。 (3) 小型無人飛行載具應用 近來無人飛行載具開發趨向設計為體積小,配備簡化,驅動馬達與電池等電 裝輕量化,以提高無人飛行載具的可攜性與方便性,且小型無人飛行載具較不受 起降地形限制且續航力大幅提升,而造價成本大幅降低,使無人飛行載具更為廣 為各界所應用,例如空照攝影、三維地形建模、環境保護監測與緊急災害救助等。 綜觀上述,無人飛行載具應用的興起同時帶起與其相關應用之技術開發研究 計畫,以及無人飛行載具開發與應用所需之軟硬體及零組件的市場。加之小型無 人飛行載具的成本低廉、地域限制低、飛行風險性低與即時性資料傳輸的應用等 特性,使小型無人飛行載具已逐漸應用在不同領域,詳細應用與實例如表 1 所列 舉。由此觀之,未來無人飛行載具應用將更為廣泛,市場需求將逐年增長,也因 而使無人飛行載具將成為未來重要的研究議題。
表 1 無人飛行載具相關應用領域與實例 應用領域 實例 災害應變 環境監測 交通管控 都市計畫 科學應用 商業娛樂 軍事運用 災情偵查[13]、災害救援[6]、物資運補[12] 空汙查勘[18]、溪流監測[18] 車輛流量管控[16]、道路監測[16] 都市變化調查[17]、地理拍攝[14] 通訊中繼站[4] 景觀拍攝[3]、包裹遞送[1] 戰地監控[24] 、遙控靶機[10]
第二節 研究動機
近年來無人飛行載具的應用廣受重視,以社群網站起家的 Facebook 以及網 路搜尋引擎 Google 等企業也相繼投入無人飛行載具的研發。其主要的原因在於 這些企業評估全球約有 60%的人口位處網路基礎設施匱乏的偏遠地區,若要改善 當地的網路建設,需費時多年且成本高昂,因此 Facebook 的研發團隊為解決此 問題而開發太陽能無人飛機 Aquila,由無人飛機航行至偏遠郊外的空中並發射雷 射光束傳輸數據,成為空中的無線網路基地台。Aquila 的航行範圍廣達直徑 60 萬英里,高度 6 萬英呎,以太陽能供電且耗能極低僅 5000 瓦特,相當於三支吹 風機的耗能,因此一次航行可滯空長達三個月之久[4]。Google 也於 2014 年發表 無人機計畫 Project Wing,此無人機翼展約 1.5 公尺,重量為 8.6 公斤,屬於小型 無人飛行載具,可載重約 10 公斤,主要作為救災用,可將救難物資空投至災區, 並可利用機上配置的相機進行勘災。圖 1. Facebook 開發之無人飛機 Aquila 由上述之例可知,無論是太陽能無人飛行載具或小型無人飛行載具,執行長 程飛行任務將為無人飛行載具最具重要的功能需求。然而長程飛行任務意即需要 長時間監控無人飛行載具的狀態,但人為操控的方式卻無法完善地達成此任務, 其主因在於無人飛行載具的操控十分精巧細密,使飛行員培訓極為不易,須接受 長期培訓且人力成本極高。並且飛行員必須長時間專注於無人飛行載具的操作與 掌控飛行狀況,容易導致精神疲憊,加之人為操作有其不準確性,且人眼對於無 人飛行載具與目標物的距離及飛行高度亦有視差,因而容易造成人為疏失[19], 因此本研究將針對無法避免的人為操作疏失,改以自動控制取代人工控制。
第三節
研究目的
本研究預計建立一套適用於小型無人飛行載具自動巡弋控制的專家系統。專 家系統是一套以知識庫為建構基礎的系統 (Knowledge-based System),能以電腦 程式模擬人類專家的應對行為並擁有執行決策判斷及危機應變的能力。本研究預 計以小型定翼機為實驗飛行載具,因定翼機可藉風力產生之浮力,減少動力能源 耗損,增長航程距離,於實務上的應用性更高。但定翼機的降落控制不易,且極 受降落場域限制,因此本研究提出的自動巡弋控制系統針對定翼機飛行過程中, 所需技巧難度最高的降落程序進行系統調校。專家系統建立完成後,將使專業人 員的培訓成本大幅降低,此自動控制技術亦能大量且快速的複製,有利於推廣原 先數量有限的專業人員知識,且無需每台無人飛機皆必須有對應之操作員,因而第二章 文獻探討
關於無人飛行載具的自動控制已有許多相關研究,也已成為各領域的科技應 用。本章節將分為三節作文獻回顧,分別為專家系統、無人飛行載具應用和以專 家系統建置無人飛行載具自動巡弋控制的應用等相關研究。第一節
專家系統相關研究
專家系統為一套可擷取專家知識之電腦程式或軟體,並藉此模擬人類專家於 面臨問題時的判斷並執行模擬專家行為的應對措施。因此,專家系統的目的為使 電腦系統能如同人類專家擁有解決複雜問題的能力,藉由推論引擎 (Inference Engine),以及由某特定領域專家的經驗與知識所建立的知識庫 (Knowledge Base),使程式系統能模擬人類專家的思維,進行自動推理 (Automated Reasoning)。 因此專家系統亦被視為以知識為本的系統。以下列舉應用實例。 醫療領域:MYCIN [7]為早期專家系統最為成功的案例,因許多細菌名稱以 mycin 為字尾,故而得名。此醫療專家系統由美國史丹佛大學(Stanford University)歷時五至六年所研發,可根據患者的病況敘述與體重等生理資訊, 推理病因是因何種病菌引起並給予合適的診斷建議。儘管最終並未實際應用 於真實診療,但研究指出此醫療診斷專家系統的表現在 69%的案例中,優於 人類專家做出的診斷,是人工智慧領域中影響深遠的研究成果。近期則有 Mohamed Ramadan 與 Khalid Al-Saleh [12]兩位學者利用專家系統輔助醫療 診斷,使用者依照規定格式輸入診療資訊,由系統檢查確認,以避免人為疏 失。 個人化教學:為解決奈及利亞教育資源的匱乏,Nwigbo Stella N. 與 Agbo Okechuku Chuks [23]等學者,將專家系統導入教育體制中,以解決師資不足 的問題,實踐學童個人化教學。藉由專家系統的輔助,可根據個人的學習程
度與學習狀況進行調整,記錄個人的學習進度,也能使教師更明確的掌握每 位學生的學習情況。教育類的專家系統已應用於電腦科學、工程學、語言學 習以及其他與數學相關的領域。
益智遊戲電子玩家[25]:美國熱門的益智遊戲電視節目 Jeopardy 於 2011 年 時遇上全勝強者 Watson。Watson 是 IBM (International Business Machines Corporation)利用專家系統開發的益智遊戲電子玩家系統,據 IBM 的描述, Watson 是一高階問答系統(Highly Advanced Question Answering System),具 有假說推論以及大量資料的蒐集、分析與評比的能力,並於短時間內精確無 誤的解答複雜難題。 農作生長監測:J. Romeo [15]等人為了促進農業生產自動化,設計出一套可 自動辨識植物綠意的專家系統,透過攝影裝置分析圖像中植物顏色的三原色 光譜,判別植物生長是否健康,以及是否需要噴灑農業或除草。Fahad Shahbaz Khan [8]等學者將專家系統應用在巴基斯坦的小麥種植,檢查小麥的葉片生 長情況以判定是否染上疾病或遭到松鼠肆虐。
汽車維修:Ms. Neeta Verma [21]等學者利用專家系統協助車主找出汽車故障 的原因,此專家系統可偵測汽車的各種故障狀況,使車主在汽車故障的第一 時間,即使沒有人類專家在場也能查出汽車的故障問題,並排除故障問題。 Nana Yaw Asabere 與 Simonov Kusi-Sarpong [22]同樣也是針對汽車故障開發 檢測的專家系統,且將專家系統建置於行動裝置上,即使車主並無汽車維修 的相關知識,也能透過專家系統的協助自行處理故障問題。由上述各例可知,專家系統已然是一項發展成熟的工具,在各領域的開發應 用上皆有良好的成效。因此本研究預計將專家系統導入無人飛行載具的控制,建 構一套能使小型無人飛行載具自動巡弋的飛行控制系統,期望透過本研究的完成,
降低無人飛行載具的使用門檻限制,避免人為操控疏失,進一步提升無人飛行載 具應用的普遍性。
第二節
無人飛行載具應用相關研究
無人飛行載具廣泛使用於不同領域,藉由搭載攝影機或其他偵測模組,可進 一步提升無人飛行載具的應用。以下列舉近年來相關研究所應用的實例。 古蹟遺址的空拍圖以及三維建模地形圖,因涉及專業技術及高價的製圖儀器, 例 如: 雷 射掃 描器 及 地 質 透射 雷 達(Ground-penetrating Radar)。 因此 J. Fernández-Hernandez [14]等考古學者希望藉由低成本的小型無人飛行載具, 搭載攝影機進行考古遺址區域的空拍,並利用此空拍圖作為三維建模的素材, 建立古代遺跡模型,使考古學者們能清楚瞭解遺跡全貌。 氣候變遷以及全球暖化的現象日趨嚴重,因此對流層的空氣品質監測十分重 要,A. Malaver [2]等學者將氣體偵測系統(Gas Sensor System)搭載於無人飛 行載具,進行空氣氣體數據的探測與蒐集,主要以交通工具排放氣體 NO3、 農牧業排放氣體 NH3 以及對人體健康有害之 0.05ppm 至 35ppm 大小的懸浮 粒子大小為主要監測氣體。 重大災害發生後的救援行動,經常因災情慘烈而使深入災區成為一項難題, 例如美國的卡崔娜颱風風災及日本福岡的 311 核災。Molina P. [20]等人提出 一項搜救計畫,利用熱感影像偵測器(Thermal Imaging Sensor)以及紅外線光 學影像(Optical Infrared Vision)偵測器搜查倖存者跡象,並將此偵測器搭載於 無人飛機飛行載具,進入災區掌握災情,使救難人員能快速瞭解災情狀況, 提升救援行動的效率,亦能降低救難人員進入災區救援時的傷亡風險。
快速勘查機制的建立,以中歐為例,在現代社會中十分依賴電力、水、天然 氣以及通訊設備等基礎設施,若因天災而使能源供應或通訊設施中斷,將造 成重大的商業財務損失,因此 Hans-Peter Thamm [13]等學者提出以無人飛行
載具建立勘查程序,利用無人飛行載具於空中進行攝影,快速掌握損害情形 以利修繕。 由上述各項研究可知,無人飛行載具在不同領域皆是很好的研究輔助工具。 因此若能將無人飛行載具的飛行控制自動化,替代飛行員操作飛行控制,能使未 受過無人飛行載具操作訓練的人員亦能使用,且人眼視距有限,而自動控制飛行 可執行視距外的長時間長程飛行任務。另外,由於飛行自動控制系統是按事先規 劃的飛行路徑腳本執行,因此若透過執行相同的飛行路徑腳本,進行空中攝影或 災區勘察,可掌握不同時間但相同地域的地表變化,由此可知若能以專家系統進 行小型無人飛行載具的自動控制,可進一步提升無人飛行載具應用在各領域的實 用性。
第三節
以專家系統建置無人飛行載具自動巡弋控制應用的相關研究
專家系統是一項發展成熟且完善的技術,已有相關研究嘗試利用專家系統建 置無人飛行載具自動巡弋控制。Michael Livchitz [19]等學者建置以模糊邏輯為基 礎(Fuzzy-logic Based)的自動降落控制專家系統,其研究主要是利用架設在地面 降落場域的攝影機擷取飛行載具即時影像並傳輸給模糊邏輯控制系統(Fuzzy Logic Control System),模擬專家飛行員視角進行降落。此研究僅靠地面攝影機 的影像作為自動降落控制的數據依據,並未使用 GPS 定位、三軸加速器或陀螺 儀等偵測器偵測精準的飛行位置量測模組,且此研究的控制的系統為遠端地面站, 可能會有因通訊中斷而無法即時控制的風險。 Yuki Kuroki [26]等學者於無人飛行載具上裝置空汙氣體偵測器,使無人飛行 載具航行時能即時偵測所處航空的氣體成分,並將偵測器的氣體分析資料回傳予 無人飛行載具的自動航行專家系統,藉由氣體成分資料判別是否已脫離空汙範圍, 若已脫離空汙範圍則改變航向,繼續探索空氣汙染範圍邊界,若否則持續航行, 藉此方式偵測空氣污染的實際範圍。Francisco Fernández [17]等人將無人飛機自 動導航專家系統應用於海難救援。海難發生後十分鐘內將為是否能成功搶救海難 者的黃金時間,因此海難救援中心於收到求救訊號的第一時間,將先派出機動性 高並裝備影像系統(Visual System)的無人飛機前往訊號發射點,並於偵測到第一 名海難者之位置與當時的風向,推估海難者可能的漂移方向並修改航行路徑,持 續偵查下一位海難者位置,再推估下一個目標航向,直至搜索範圍已查無海難者 或時間已超過十分鐘時,方才結束任務回到海難救援中心。 由上述二例可知,已有研究將專家系統結合無人飛行載具的飛航範圍控制, 兩者皆是透過接收其他偵測器的數據,例如氣體成分或影像,作為飛行導航的評 估依據。本研究則預計以專家系統建置無人飛行載具的自動巡弋控制系統,使無 人飛行載具具備自行評判飛行環境的能力並調整飛行姿態,完成飛行任務,藉此 使無人飛行載具成為輔助各項研究領域實驗的工具。
第三章 無人飛行載具專家系統建置
本研究主要是利用專家系統具備彈性的監測與操控方式,建立小型無人飛行 載具自動巡弋系統之研究,首先於第一節提出本研究的自動飛行控制之系統架構, 主要以定翼機無人飛行載具、遠端地面控制站以及專家系統三者為主要構成,此 利用專家系統技術的系統架構除在小型定翼機之飛行載具上使用外,此一自動操 控的系統架構也可以應用於不同類型的無人載具環境,例如旋翼機飛行載具或是 船舶載具的應用環境,提供了一個可多方面應用的系統架構。 在本章第二節中介紹定翼機無人飛行載具,以及定翼機與遠端地面控制站進 行通訊所應用的 MAVLink 通訊協定,以此說明了定翼機載具在自動飛行時所需 要各項操控機制,和本研究所提出之系統中所需要的各式飛行狀態資料,藉以了 解在應用專家系統進行自動飛行操控所需要的各式資料,與可以進行的各項操控 指令說明。 在 本 章 的 第 三 節 說 明 本 研 究 應 用 美 國 國 家 航 空 暨 太 空 總 署 (National Aeronautics and Space Administration, NASA)所開發的開放式原始碼資源中的專 家系統 CLIPS(C Language Integrated Production System)做為本研究的操控核心的 建置方式,並說明在小型飛行載具上,如何以小型單機版電腦運行此一專家系統, 進行自動飛行操作的執行模式。最 後 在 本 章 第 四 節 說 明 本 研 究 所 應 用 之 開 放 式 架 構 遠 端 地 面 控 制 站 MAVProxy,與具圖型化操作介面之地面監測站 Mission Planner,整合呈現各式 即時的飛控資訊,且地面控制站所蒐集到的完整資訊可作為飛行任務完成後之評 估基礎。
第一節 無人飛行載具自動巡弋系統架構
本研究之無人飛行載具自動巡弋系統架構如圖 2 所示,以下主要分為三部分 加以說明。第一部份為無人飛行載具與通訊協定,在本研究主要是以定翼機為實 驗測試基礎,於執行飛行任務時回傳飛行狀態資料(Flying State Data),例如:無 人飛行載具所在的地理位置,包括經度、緯度、高度,以及無人飛行載具的對地 相對高度、飛行方位角等重要的飛行參考資訊。在資料傳輸方面則利用 MAVLink 為主要的通訊協定,此通訊協定設計目的是作為小型飛行載具與地面控制站之間 的資料傳遞,在主研究中主要解析 MAVLink 格式之飛行狀態資料,並即時轉換 成專家系統可以運用分析之資料格式。 第二部份為專家系統,專家系統由知識庫與推理引擎構成,透過傳輸進來的 資料與知識庫的規則(Rules)進行比對,若有符合的條件則由推理引擎觸發規則所 對應的飛行操控動作,並自動下達合適的飛行指令以操作無人飛行載具進行相對 應的各式飛行動作。第三部份為地面控制站,可即時監控無人飛行載具,呈現飛 行狀態數據,也可於緊急情況下遠端操控無人飛行載具。圖 2 為本研究中主要的 系統架構,以下在本章中就主要的各部份分節詳述。 圖 2 無人飛行載具專家系統架構圖
第二節
定翼機無人飛行載具與通訊協定介紹
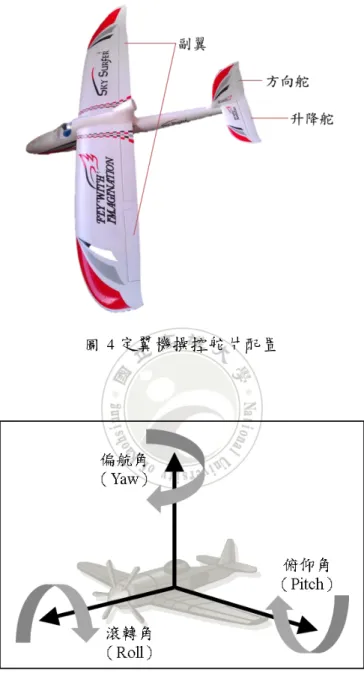
在當前小型無人飛行載具所應用的形式可大致區分為旋翼機與定翼機兩種 類型,如圖 3 所示。旋翼機通常由發動機驅動的獨立水平螺旋槳產生推進力以升 空和前進。正常飛行時,旋翼機的旋翼被前進時的相對氣流吹動而自旋,從而產生 上升浮力使飛行載具飛行,例如直昇機和旋翼式螺旋槳飛機。此類形飛行載具可 定點起飛降落而不需要起飛和降落的跑道,並且可於空中懸停,利於作為固定航 點上的空中監測使用,但因為主要的飛行上升浮力都需要由自身的螺旋槳產生, 是屬於較為耗損能源的飛行方式,所以相較定翼機而言是屬於較短程航距內的飛行 模式。近年來因小型多旋翼載具的零組件製造成本降低,促成此一類形飛行載具的 普及,但也因為其短程航距的限制,在應用上有其侷限性。 圖 3 旋翼機與定翼機無人飛行載具 定翼機為另一類形的無人飛行載具型態,其具備推進系統及固定的主翼 (Fixed-wing),因其推進系統產生前進的推力,隨著前進的速度增加使主翼產生 上升的浮力,當升力大於機體重量時即可使整個定翼機浮升,以此方式所進行的 飛行模式,因藉由空氣流動過機翼所產生的浮力而可支撐長程飛行所需的上升浮 力,是較節省推進能源的飛行方式,可獲得較長距離的飛行航距。但相對旋翼機而 言則無法於某一固定航點進行懸停,起飛與降落也需要足夠的場域以進行起降。特別是定翼機降落時需有足夠長度的跑道以供降落滑行,目前現有小型定翼 飛行載具在自動降落的模式時機身姿態平緩,所需滑行跑道較長,這使得目前在 利用定翼機進行飛行任務時,受到降落場域限制而有較多的顧慮。有鑑於此,本 研究利用所提出的專家系統架構改善定翼機自動降落的飛行控制模式,以期能提 高自動降落的效能,以降低因降落場域環境因素所造成的限制,並以此提高定翼 飛行載具所能應用的範圍。 定翼機的飛行姿態主要是由機上的副翼(Aileron)、方向舵(Rudder)與升降舵 (Elevator)控制,圖 4 為定翼機之控制舵片配置,飛控系統針對控制不同的舵片的 伺服馬達下達旋轉角度的指令,藉由操作舵片的轉動角度以控制飛行載具的飛行 動作。定翼機副翼的改變可使機身傾斜,產生滾轉角(Roll),這項操作主要使得 定翼機快速改變飛行方向時所運用,在轉向時會產生定翼機左右平衡的變化,進 而再調整升降舵使得飛行載具可在小範圍內快速轉向,而所產生的滾轉角度大小 可以量測出在飛行轉向時傾斜的程度。在降落的過程中除突發的側風因素外,需 要盡可能保持滾轉角的平衡,以免造成左右機翼先著陸的嚴重損害。 定翼機升降舵的改變則產生俯仰角(Pitch),使機頭朝上進行爬升或機頭朝下 降低高度,此一操作除了上述配合副翼快速轉向外,另一重要的操作則是利用俯 仰角的調整和推進力的改變以提高或降低飛行高度,而俯仰角的大小可以反應出 定翼機機頭向上或向下的傾斜程度,在降落的過程中需要盡可能保持俯仰角趨近 水平,使飛行載具以平衡的方式著地,以避免降落時使機頭或機尾部份先著地而 造成定翼機的損害。 方向舵的改變可使機身維持水平並轉向,產生偏航角(Yaw),這項操作主要 是在飛行時需要微調飛行載具的飛行方位角,在高空飛行時為了維持固定的飛行 方向,因而根據風向的不同進行調整,至於調整的大小與模式也因不同定翼載具 設計上的不同而有所差異。而述各項舵片角度的些微變化皆能使定翼機姿態顯著 改變,大幅度的角度改變會造成定翼機失速墜毀,尤其是在降落的過程中。因此 本研究預期透過所提出的飛行控制專家系統精準控制定翼機的降落程序,降低定
翼機失速的可能性,並尋求到更佳的降落控制模式,以減短定翼機所需降落滑行 跑道的長度。
圖 4定翼機操控舵片配置
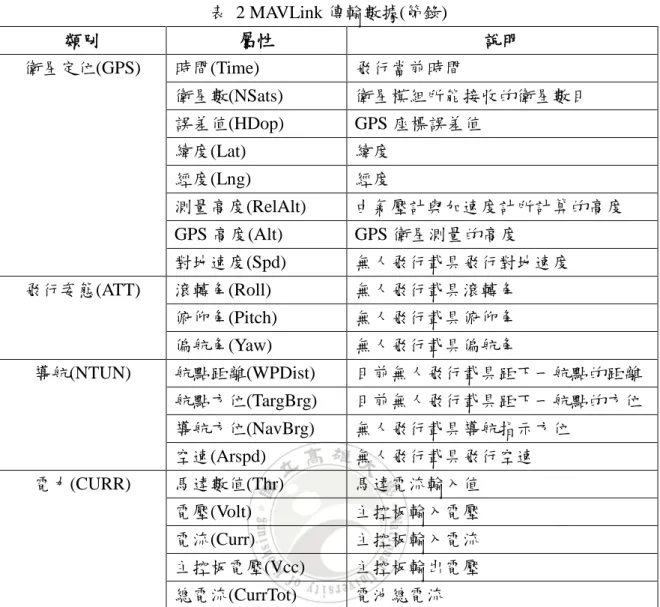
在本研究中所採用的飛行控制版是 ArduPilot Mega (APM)是以開放式原始資源 中的 Arduino Mega 電路板為基礎所開發的自動駕駛控制電路板,ArduPilot Mega 飛 控板可自動記錄每次飛行任務執行時的相關訊息,包含環境變速如:風速、衛星訊 號、地球磁場磁力等,機體狀態如:剩餘電力、機體傾斜角度、飛行速度、經緯度 位置、飛行方位角等,再將飛船飛行狀態的相關資料數據回傳予地面控制站,即時 分析與預期狀態的差異以自動進行調整,使機體能夠更加穩定。ArduPilot Mega 飛 控板由於其設計精簡,經常被運用於介面較簡單的飛行控制應用。 本研究需要即時掌控定翼機的飛行狀態,使用了在開放原始碼資源中的 MAVLink 通訊傳輸協定即時回傳飛行狀態數據。MAVLink 是專門設計應用於小 型無人飛行載具的通訊協定,作為無人飛行載具與地面控制站之間的數據傳輸使 用,因為是開放原始碼的設計,所以所有回傳的資料和傳輸的程式都是公開的格 式,可方便被其他應用程式加以整合,在本研究中主要所應用到的資料,如表 2 所示大致可分為四大類: (1) 衛星定位類別的資料是關於無人飛行載具當前位置與時間 (2) 飛行姿態類別是無人飛行載具在飛行時的載具狀態,這部份的資料特別是專 家系統利用來進行飛行指令判定的重要依據 (3) 導航類別是無人飛行載具在進行自動飛行時所計畫飛行時,所相對應的航點 位置與飛行資訊 (4) 電力類別是無人飛行載具當前的電力狀態,藉以了解飛行載具的續航能力。 並且也經常以此類資訊做為緊急應變狀態是否返航的判斷依據
表 2 MAVLink 傳輸數據(節錄) 類別 屬性 說明 衛星定位(GPS) 時間(Time) 飛行當前時間 衛星數(NSats) 衛星模組所能接收的衛星數目 誤差值(HDop) GPS 座標誤差值 緯度(Lat) 緯度 經度(Lng) 經度 測量高度(RelAlt) 由氣壓計與加速度計所計算的高度 GPS 高度(Alt) GPS 衛星測量的高度 對地速度(Spd) 無人飛行載具飛行對地速度 飛行姿態(ATT) 滾轉角(Roll) 無人飛行載具滾轉角 俯仰角(Pitch) 無人飛行載具俯仰角 偏航角(Yaw) 無人飛行載具偏航角 導航(NTUN) 航點距離(WPDist) 目前無人飛行載具距下一航點的距離 航點方位(TargBrg) 目前無人飛行載具距下一航點的方位 導航方位(NavBrg) 無人飛行載具導航指示方位 空速(Arspd) 無人飛行載具飛行空速 電力(CURR) 馬達數值(Thr) 馬達電流輸入值 電壓(Volt) 主控板輸入電壓 電流(Curr) 主控板輸入電流 主控板電壓(Vcc) 主控板輸出電壓 總電流(CurrTot) 電池總電流 在衛星定位的資料中,衛星時間是一項重要的資訊,在本研究所提出的自動 飛行架構中,包括了有操作飛行動作的飛控電路、專家系統與通訊所使用的單機 電腦與地面站系統,甚至在如空拍與量測所所用的其他周邊系統,都需要統一的 參考時間來進行資料同步並判斷與不同系統資料整合。在本研究中則是以飛行載 具上所擷取到的衛星時間來做為系統所應用的標準時間。 在真實場域飛行時衛星定位的資料中的衛星數量則與 GPS 量測誤差值有重 要的相關性。GPS 訊中在經緯度、對地高度與對地相對速度都能夠提供飛行導航 中重要的參考資訊,而隨著飛行場域中所能擷取到的衛星數量越多則可大幅提高
所以此項衛星數量資訊一直都為在飛行任務進行前為評估是否可在飛行場域進 行飛行任務最為重要的參考依據。 飛行姿態中的滾轉角與俯仰角是根據飛行控制板上的三軸加速計與三軸陀 螺儀所做出的即時偵測,而偏航角則是根據飛行控制板上的電子羅盤所偵測出的 數值而呈現,此類的飛行姿態資訊並不需要衛星通訊的應用,只需依據在飛行載 具飛行控制板上的電子模組就可以有精確的飛行姿態訊息,而在本研究中利用不 同載具來調整飛行指令的參考依據就是以這部份的資料做為判斷基礎,在飛行的 過程中這部份的資訊與飛行控制的方式密切相關,在傳達至地面站的各項資料中, 在飛行過程中這一部份連續的彙整資料,將可有效的找出飛行異常和可能的飛行 失事的原因。 飛行導航資料則是飛行載具在進行自動飛行時所計畫飛行時,所相對應的航 點位置與真實飛行記錄資訊,在載具進行自動飛行時可依此傳回的資訊與計畫中 飛行的程序做一比較,可判定是否飛行載具的飛行軌跡與預計飛行路徑是否相符。 而電力相關的資料主要是在反應飛行載具還可飛行的時間與航距,為防止因續航 能力的不足所產生的意外墜毀,在一般進行的飛行任務時都會設定安全電量,在 小於安全電量時會以返回原起飛地(Return to Launch, RTL)的方式以做為自動飛 行基本的安全設定。本研究主要藉由即時回傳的定翼機飛行位置之經緯度座標、 飛行高度與俯仰角數據,提供專家系統作為自動降落的操控依據,下一節說明專 家系統的建置與操控。
第三節
飛行控制專家系統架構
專家系統是指藉由電腦程式模擬人類專家進行評估與判斷,主要以知識庫與 推理引擎構成,知識庫以規則集(Rule-base)組成,當符合知識庫某規則條件時, 由推理引擎執行規則所對應的動作。本研究透過 MAVLink 將飛行狀態數據即時 傳輸予專家系統,當無人飛行載具接近地面時,符合知識庫中進入自動降落模式 的規則,因此推理引擎下達指令(Command)予無人飛行載具,開始執行自動降落, 使機身傾斜,控制俯仰角下傾的角度,使無人飛行載具加速降落。當無人飛行載 具接近地面時,符合知識庫中即將觸地的規則,為了使無人飛行載具平穩降落而 不墜毀,推理引擎下達指令予無人飛行載具,令俯仰角趨近水平,機身微傾繼續 下降直至觸地並滑行,完成降落。 本研究以 CLIPS 建置無人飛行載具自動巡弋專家系統。CLIPS 是 1986 年由 美國 國家 航空暨 太空 總署 研發 專家系 統建 置工 具, 屬於前 向推 理(Forward Chaining)的規則集專家系統。前向推理是資料驅動(Data-driven)的推理方式,是 指透過已知的資料與知識庫的規則集進行比對,若有符合的規則即觸發推理引擎 執行對應的動作。 本研究透過 MAVLink 將飛行狀態的資料數據傳輸予專家系統,經過知識庫 的規則比對,由推理引擎倒出合適的飛行指令並下達予無人飛行載具。規則集專 家系統的優點為操控與調整極具彈性,可在不更動原始飛行程式碼的情況下,只 調整規則即可產生不同的飛行指令。本研究首先完成自動降落的程式碼,而後透 過多次調整專架系統的規則,實驗在不同高度時開啟自動降落模式,最後得出合 適的高度作為觸發規則的依據。 本研究將專家系統建置於單機版電腦 Raspberry Pi 上,由於 Raspberry Pi 十 分輕巧,可搭載於無人飛行載具之上,使專家系統能即時下達飛行指令予無人飛 行載具,令無人飛行載具面臨任何狀況時皆能即時應對,亦可避免無人飛行載具電腦(Single-board Computer),由英國的 Raspberry Pi Foundation 所研發,旨在以 開源軟體促進學校電腦科學教育。最新版的 Raspberry Pi 具備乙太網路介面,可 透過 3G 網路連線進行資料傳輸,另外也具備無線網路功能。 圖 6 單機版電腦 Raspberry Pi
第四節
專家系統規則庫
規則集為構成專家系統最為重要的部分,是人類專家的知識轉化為數條規則, 若有符合相關規則的情況則執行該規則所定義的行為。本研究建立飛行控制專家 系統主要於控制飛行載具自動降落的過程,如圖 2 系統架構中藉由比對規則集與 飛行載具的即時飛行資訊,取代飛行員的操作模式,以 CLIPS 的專家系統推理 引擎判斷出相符的自動降落規則並推理出合適的飛行指令,並再以 Mavlink 的通 訊協定對飛行載具下達飛行任務。本小節僅以飛行降落控制部分說明本研究所運 用的規則,此部份規則的是藉由飛行專家根據執行多次飛行實驗後歸納而出的部 份法則。 規則一:IF (FlyingMode = = AUTO) & (Altitude <= 50 m) =>
(FlyingMode = = Land_Process)
當飛行載具的飛行模式為「自動飛行(AUTO)模式」且「飛行高度(Altitude)」 低於或等於 50 公尺時,則將飛行模式改為「降落程序(Land_Process)」以使飛 行載具進入降落模式。
規則二:
IF (Land_Process) & (25 m < Altitude <= 50 m) => (Throttle = 1300) 當飛行載具的「飛行模式」為降落程序且「飛行高度」低於 50 公尺時,將飛 行載具的「油門控制(Throttle)」數值調降為 1300(油門控制初設值為 1500; 最低值為 1000,即關閉動力),使飛行速度減緩以利飛行載具進行降落。 規則三:
IF (Land_Process) & (1.5 m < Altitude <= 25 m) => (Throttle = 1300) (Pitch = 1800) 當飛行載具的「飛行模式」為降落程序且「飛行高度」已低於 25 公尺時,將 飛行載具的「油門控制」數值設為 1300,並將飛行載具「俯仰角(Pitch)」數 值設為 1800(俯仰角初設值為 1500,使飛行載具呈水平狀態),使飛行載具 機身傾斜向下,使其能加速降低飛行高度。 規則四:
IF (Land_Process) & (0 m < Altitude <= 1.5 m) => (Throttle = 1000) (Pitch = 1600) 當飛行載具的「飛行模式」已進入降落程序且「飛行高度」低於 1.5 公尺,此 時飛行載具已十分貼近地面,為了減緩飛行載具的俯衝而不至於使其墜毀, 則將「油門控制」數值設為 1000,即動力歸零,並將「俯仰角」數值設為 1600, 使飛行載具以接近水平的朝下姿態,進入降落滑行的狀態。
規則五:
IF (Land_Process) & (Altitude ≦ 0 m) => (Arm = OFF) 當飛行載具的「飛行模式」為降落程序且「飛行高度」等於 0 公尺,此表示 飛行載具已成功降落於地面,則將飛行載具的「操作控制(Arm)」關閉,結束 飛行任務。 綜上所述,專家系統的特色即在於將規則獨立成一個規則集,以本研究為例, 若需更改飛行自動控制的規則,無須更動飛行控制程式,僅需將規則集的規則內 容作修正,且藉由規則的建立,能將一個動作行為精細劃分,使飛行控制專家系 統的判斷更為縝密而能降低操作上的疏失。
第五節
開放式架構之遠端地面控制站
由於無人飛行載具不須駕駛員,因此遠端監控的地面控制站極為重要且必須。 本研究使用 MAVProxy 為地面控制站,MAVProxy 是以 Python 程式語言寫的開 放式原始碼的軟體,其特色為安裝簡易,支援任何以 MAVLink 通訊協定為傳輸 方式的無人飛行載具控制系統。並且因為是開放式原始碼的的程式,可以方便依 本研究所需要建立的系統架構進行修改。以下圖 7 為 MAVProxy 執行之系統介 面。本研究所提之系統架構在執行飛行任務前,可透過地面控制站規劃飛行路徑 腳本,之後上傳至無人飛行載具的飛行控制電路板。地面控制站亦能以數據即時 顯示無人飛行載具的狀態,飛行期間,可於地面控制站即時監測所在位置、飛行 姿態、電力耗損、飛行時間等。飛行任務執行完畢後,再透過地面控制站下載飛 行記錄(Log),並檢視與分析飛行記錄,以利下次飛行任務編制調整。若遇突發 情況,地面控制站也可介入無人飛行載具的操控,下達飛行指令予無人飛行載 具。 本研究另外使用圖形化介面之地面監測站 Mission Planner 作為飛行任務進 行中的監測,Mission Planner 連接上無人飛行載具後,可作為飛行前的狀態檢查, 例如:機身姿態平衡、衛星連接訊號、剩餘電力等,於執行飛行任務中,可於地 圖上監測飛機所處位置,以及飛行高度、對地速度、與下一個航點間之距離等。 圖 8 Mission Planner 地面監測站
第四章 實證與評估
本章首先於第一節說明本研究的飛行控制專家系統之評估方法,實驗進行方 式,以及實驗後的飛行紀錄檔介紹。第二節提出本研究的評估標準,以自動降落 過程的紀錄,分析水平移動距離、對地高度、水平移動速度與垂直移動速度等四 項標準值進行評估。第一節 實證方法
本節說明無人飛行載具飛行控制專家系統評估方法。本研究使用定翼機為實 驗飛行載具,由於定翼機需有足夠長度的跑道供滑行降落,因此定翼機的降落極 受飛場限制,若能提升定翼機降落時的效率,即在較短跑道內完成降落滑行,即 可縮短滑行距離,降低場域限制。因而本研究以自動降落模式的表現作為無人飛 行載具飛行控制專家系統的主要評估標準,並與 ArduPlane 的自動降落模式進行 比較。ArduPlane 是本研究採用的飛行控制板 ArduPilot Mega 上執行的韌體 (Firmware),適用於定翼機的自動控制系統,提供的功能包含自動起飛、自動降 落以及空拍相機控制等,亦可結合地面控制站軟體進行飛行路徑腳本編制,並於 飛行過程時透過無線電傳輸進行飛行載具與地面控制站之間的溝通與控制。 ArduPlane 目前已廣泛應用於教育與研究領域,因此本研究的自動降落是與 ArduPlane 的 AUTO 模式作為評估基準。 實驗進行 本研究之自動巡弋控制系統開發完善前,不適合以實際飛行進行實驗,因飛 行失控可能導致周邊人員受傷或器物損害,且飛行載具的損毀亦使實驗成本 提高。因此本研究使用 ArduPilot 提供的 SITL (Software In The Loop)模擬器 進行飛行實驗,透過地面控制站與模擬飛行載具進行連線,便可監測模擬飛 行載具的飛行狀態,SITL 模擬器可模擬實際的無人飛行載具進行飛行起降, 以及手動模式與自動模式的切換,並可藉由模擬環境的參數設定,例如風速 或風向設定,以模擬不同飛行環境時無人飛行載具的飛行狀態。本研究首先將 SITL 模擬器連接上 MAVProxy 之地面控制站,透過 MAVProxy 的命令列介面(Command-line Interface)進行飛行模擬器的飛行路徑腳本設定,並 啟動模擬飛行載具執行飛行任務,再連接上 Mission Planner 地面監測站進行飛行 任務的監控。飛行路徑行點如 7 圖所示,第一次飛行實驗由 ArduPlane 的 AUTO 模式,即是自動飛行模式下起飛,並按照設定的航點順序執行飛行任務,在通過 倒數第二個航點,也就是圖 7 中第七點,開始進入降落程序,直到無人飛行載具 完全觸地為止。第二次飛行實驗同樣先以 ArduPlane 的 AUTO 模式起飛後,由專 家系統監控飛行過程,並於通過倒數第二個航點後進入專家系統飛行降落控制, 直至降落觸地即完成飛行任務。本研究的實驗設計使 ArduPlane 的 AUTO 模式降 落與專家系統飛行降落控制在相同的條件下進行實驗,以利兩者的飛行控制進行 評估比較。 圖 9 飛行路徑規劃腳本
飛行記錄檔介紹 ArduPlane 能將每次的飛行任務自動記錄,留下.kmz 檔案與.log 檔以供分 析。.kmz 檔為 Google Earth 執行檔的規範格式,資料呈現如圖 10 與圖 11,圖 10 為全程由 ArduPlane 的 AUTO 模式模擬無人飛行載具的飛行與降落,每一條黃色 的直線為無人飛行載具飛行的位置與高度紀錄,因此由黃色直線排列而成的軌跡 即為飛行路徑。圖 11 的飛行路徑由黃色路徑及綠色路徑組成,黃色路徑為 ArduPlane 的 AUTO 模式飛行,綠色路徑則切換為專家系統的降落模式。由圖 10 與圖 11 的呈現可看出,相較 ArduPlane 的 AUTO 模式的飛行降落,專家系統的 降落飛行路徑更短。.log 為文字檔,可使用 Mission Planner 的 Log Browser 進行 圖表分析,如圖 12,下方表格為數據列表,上方曲線圖可由右方的變數欄位勾 選欲呈現的變數,Log Browser 將自動根據所算變數繪製曲線圖。
圖 10 以 Google Earth 開啟飛行紀錄檔(ArduPlane AUTO 模式降落模擬)
圖 12 Log Browser 分析飛行記錄檔
第二節 實驗結果
本節說明研究實驗結果與分析。由於本研究所建構的飛行控制專家系統主要 是為了提升定翼機降落的效率,因此本研究以自動降落的表現作為飛行控制專家 系統的評估,藉由評比飛行控制專家系統與 ArduPlane 的 AUTO 模式兩者於自動 降落的表現,驗證本研究提出的飛行控制專家系統的成效。本研究將自動降落的 過程分別以四項數據呈現,作為評量標準,此四項數據分別為:水平移動距離、 高度變化、水平移動速度以及垂直移動速度,以下逐項說明。(1)水平移動距離 由於定翼機降落貼近地面時,會維持機身水平滑行於跑道上,直至動力歸零 方停止滑行,完成降落。本研究以進入降落模式的位置起做為量測的距離的原點, 圖 13 為 ArduPlane AUTO 模式與飛行控制專家系統於降落過程時所移動的水平 距離,ArduPlane AUTO 模式下的降落過程耗時約 37 秒,滑行距離約 510 公尺, 飛行控制專家系統控制下的降落過程耗時約 20 秒,滑行距離約 220 公尺。由此 可知飛行控制專家系統可在較短的時間內完成降落,且所需的滑行距離僅需 ArduPlane AUTO 模式降落控制下 2/5 的長度,於實地飛行將更不受飛場之場域 限制,大幅提升無人定翼機的應用。 圖 13 自動降落過程之水平移動距離
(2)高度變化 定翼機的降落過程首先是令機身前傾,向下降落至接近地面後再將機身拉抬 為水平,然後水平滑行直至動力歸零方止。為了不受場域限制,縮短降落跑道, 定翼機的降落過程宜快速降低高度,進入水平滑行,因此本研究提出的飛行控制 專家系統將降落的角度加大,以加速高度的降低並進入水平滑行。圖 14 為飛行 控制專家系統與 ArduPlane AUTO 模式控制下,自動降落過程隨時間推進的高度 變化,飛行控制專家系統約 5 秒即降落至貼近地面並進入水平滑行,過程總共費 時約 20 秒,ArduPlane AUTO 模式控制下的降落較為平緩,約歷時 30 秒方降落 至貼近地面並進入水平滑行,整體降落過程耗時較長約 37 秒。 圖 14 自動降落過程之高度變化
(3)水平移動速度 圖 13 為飛行控制專家系統與 ArduPlane AUTO 模式控制下,自動降落時隨 時間變化的水平移動速度。飛行控制專家系統於降落開始至 4.4 秒時,水平移動 速度提升,而後逐漸減速,直至 19.5 秒時速度歸零,完成降落程序。ArduPlane AUTO 模式下的自動降落過程中,水平移動速度緩慢遞減,直至約 37 秒時速度 方才歸零,結束降落程序。由兩者的表現可看出,飛行控制專家系統可在較短的 時間內減速至速度歸零,完成飛行降落。 圖 15 自動降落過程之水平移動速度變化
(4)垂直移動速度 圖 14 為自動降落過程中,飛行控制專家系統與 ArduPlane AUTO 模式控制 下分別的垂直移動速度變化,在本研究中設定垂直向下的速度方向為正值,速度 負值為飛行方向朝上。飛行控制專家系統的降落過程首先為加速朝下,維持約 4 秒的等速度後,於 4.5 秒時略微抬升,其後又略微下降再抬升,於 6 秒後垂直速 度幾乎趨近於零直至 19.4 秒,結束自動降落。ArduPlane AUTO 模式下的降落, 前 4.3 秒時為逐步減速朝下,4.3 秒至 8.5 秒時速度回升至每秒降落 1 公尺,之後 維持等速至 15.2 秒,再減速至每秒降落 0.4 公尺,其後維持等速至 31.2 秒時, 速度降至趨近於零,於 37 秒結束降落。整體而言,ArduPlane AUTO 模式下的降 落方式較為和緩,而飛行控制專家系統垂直降落的速度較快,能於較短的時間內 完成降落。 圖 16 自動降落過程之垂直速度變化
總結本研究提出的飛行控制專家系統實驗評估結果,完整降落過程耗時約 20 秒,由圖 14、圖 15、圖 16 可觀知,自動降落開始後 5 秒內,飛行控制專家 系統已使定翼機快速降低高度,並於貼近地面時略微提升機身以緩衝降落的慣性 而不至於墜毀,之後貼近地面持續滑行直至速度歸零,由圖 13 觀知整體所需降 落跑道長度約 220 公尺。相較 ArduPlane AUTO 模式下的自動降落需歷時約 37 秒,由圖 15、圖 16 可觀知,ArduPlane AUTO 模式的降落方式較為平緩,即水 平速度隨著時間經過所變化的幅度較小,垂直速度亦是小幅度的逐漸遞減,所以 ArduPlane AUTO 模式的自動降落較為耗時,所需降落跑道長度也較長,由圖 13 可知需 510 公尺。因此,透過水平移動距離、高度變化、水平速度變化與垂直速 度變化四項數據的評估,可驗證本研究提出的飛行控制專家系統於自動降落控制 是較為有效率的。
第五章 結論與未來研究方向
第一節 結論
現今社會科技進步,各項領域皆朝向自動化發展,Google 公司自 2013 年起 陸續收購了八間自動化機器人製造產業,致力於不同使用目的的自動化機制研發, 其中有協助災害現場緊急救援的機器人,可搬運障礙物、運送急救物資,亦有研 究機器人運算能力的人工智慧研發等。其他知名企業如 Amazon 與淘寶的物流業 者,各自開發了集貨與貨物分撿的機器人,效率大幅提升且人力成本降低。甚至 於一般家庭使用的掃地機器人也是自動化社會的表現之一。由上述種種可知自動 化的應用的重要性,而無人飛行載具的飛行自動控制亦為未來重要的應用發展趨 勢。 無人飛行載具除了是各國軍事發展的重要項目,民間的商業應用與勘災時的 救災協助也是無人飛行載具的重點發展項目。目前廣泛用於民間的無人飛行載具 多數為小型無人飛行載具,因其造價成本低且技術容易,又多以手動操作為主, 小型無人飛行載具的操作十分精細,飛行員需經過長時間的培訓,累積多次飛行 的經驗,方能獨當一面執行飛行任務。近年來由於技術發展進步,小型無人飛行 載具續航力增強,可巡航數十分鐘至數小時,使小型無人飛行載具應用性提高, 但飛行員無法長時間操作小型無人飛行載具,即使是經驗十足的飛行員,恐怕也 很難長時間維持良好的專注力,人為操作失誤更加難以避免,為解決此問題,小 型無人飛行載具的自動巡弋控制技術研發便極為重要。 本研究提出以專家系統建置小型無人飛行載具自動巡弋控制系統,此系統架 構結合多項技術且皆為開源軟體,首先是專家系統的建置,本研究使用美國國家 航空暨太空總署釋出的專家系統技術 CLIPS,並建置於單機版電腦 Raspberry Pi 上,與飛行控制板 ArduPlane Mega 一同搭載於無人飛行載具,使無人飛行載具會透過 MAVLink 通訊協定方式傳輸予圖形化介面之遠端地面監測站 Mission Planner,以及遠端地面控制站 MAVProxy,可於遭遇緊急狀態時接管無人飛行載 具的控制。 本研究透過與目前廣泛被使用的 ArduPlane 之自動控制系統進行評比,在以 模擬的實驗中證實本研究提出的自動巡弋控制系統能更有效率的完成自動降落, 縮短定翼機降落時所需的滑行跑道,降低場域限制。自動巡弋控制系統的實現將 有助於降低人為操作的疏失,且技術複製簡易快速,使飛行員的培訓成本大幅減 少,有助於提升小型無人載具的可應用性。
第二節 研究限制
本研究提出之小型無人飛行載具自動巡弋控制系統旨在改善自動降落的效 能,因此無人飛行載具的飛行高度是一項重要的數據,本研究的飛行高度數據來 源是 GPS (Global Positioning System)訊號且無其他偵測器,而 GPS 訊號品質因地 而異,若 GPS 訊號不良可能導致回傳的高度產生誤差,因本研究提出的自動巡 弋控制系統降落速度較快,高度數據的精準度不佳恐造成無人飛行載具墜毀,所 以本研究若要進行實地飛行,在 GPS 訊號不良的飛場則需加裝高度偵測的相關 模組,以確保高度數據的精確。 由於本研究目前僅於無風的飛行模擬環境進行實驗,然而實際的飛場風向不 一,無人飛行載具於飛行過程可能遭遇逆風與側風,若風勢強勁可能影響無人飛 行載具自動降落時無法保持直線前進,偏離降落滑行跑道而碰撞到其他障礙物。 因此本研究若要進行實地飛行,尚需模擬不同強風風向環境,進行實驗並調校飛 行控制專家系統,提升無人飛行載具自動巡弋控制系統的實用性。第三節 未來研究方向
本研究之自動巡弋控制系統具備良好的延伸應用,未來可延伸應用於同時操 控多台無人飛行載具,MAVProxy 地面控制站可整合不同無人飛行載具間協同執 行飛行任務,而其中亦可彈性採用不同的網路傳輸模式,例如:4G、3G、ZigBee、WIFI 和無線電網路,配合所需應用的飛行任務環境而選擇。並且可於多台無人 飛行載具的同時自動控制,除了可用於當前的單一飛行載具應用外,未來也同時 運用於多台飛行載具的環境可進行協同任務的規畫和應用。 臺灣因氣候與地理因素而受地震與颱風等天災影響,造成坡地崩落、土石流 與河川暴漲等災害,且救災行動經常受制於惡劣氣候與道路崩壞而無法深入災區 進行救援,因此無人飛行載具於勘災應用上十分重要,未來本研究若能完成各項 氣候模擬實驗並投入應用,便能於勘災時同時派出多架無人飛行載具進行受災地 區空拍,即時瞭解災區受創情況,並可空投物資予短時間內無法排除災情而受困 於災區的民眾。 總結而言,本研究提出的自動巡弋控制系統雖尚有改善加強的部分,但仍不 減其發展的重要性,且此自動巡弋控制系統具備調整彈性,可應用於其他型態的 無人載具,如:飛船、船舶等可由電腦控制之載具,因此未來仍值得持續投入這 方面的研究。
參考文獻
[1] A. Farinelli.“Recent advances on coordination approaches for Multi-Robot Systems.” Artificial Intelligence for Society and Economy, 2014.
[2] A. Malaver, F. Gonzalez, N. Motta, A. Depari, P. Corke. “Towards the development of a gas sensor system for monitoring pollutant gases in the low troposphere using small unmanned aerial vehicles.” Workshop on Robotics for Environmental Monitoring, 2012.
[3] Andrzej Bielecki, Tomasz Buratowski, Piotr S´ migielski, “Recognition of two-dimensional representation of urban environment for autonomous flying agents.” Expert Systems with Applications vol. 40, pp. 3623–3633, 2013.
[4] Aquila’s First Flight: A Big Milestone Toward Connecting Billions of People., Available at:
https://newsroom.fb.com/news/2016/07/aquilas-first-flight-a-big-milestone-towa rd-connecting-billions-of-people/.Accessed 1 May, 2017.
[5] ArduPilot Mega. Available at: http://ardupilot.com/. Accessed 1 January, 2015. [6] H. Bendea, P. Boccardo, et al, “Low cost UAV for post-disaster assessment.”,
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. 37-B8, pp. 1373-1380 , 2008.
[7] B.G. Buchanan and E.H. Shortliffe. “Rule-based expert systems: The MYCIN experiments of the stanford heuristic programming project.” United States: Addison Wesley, 1984.
[8] Fahad Shahbaz Khan , Saad Razzaq, Kashif Irfan, Fahad Maqbool, Ahmad Farid, Inam Illahi, Tauqeer ul amin. “Dr. Wheat: A web-based expert system for diagnosis of diseases and pests in Pakistani wheat.” Proceedings of the World Congress on Engineering vol. 1, 2008.
[9] Francisco Fernández, E. Besada, David Sánchez, J.A. López-Orozco, “Expert guidance system for unmanned aerial vehicles based on artificial neural networks.” Journal of Maritime Research, vol. 8, no. 1, pp. 49-63, 2011.
[10] Guowei Cai, Kai-Yew Lum, Ben M. Chen, Tong H. Lee. “A brief overview on miniature fixed-wing unmanned aerial vehicles.” 2010 8th IEEE International Conference on Control and Automation, China, 2010.
[11] H. Bendea, P. Boccardo, et al, “Low cost UAV for postdisaster assessment,” International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. 37-B8, pp. 1373-1380 , 2008.
[12] Haider Khalaf Jabbar, Rafiqul Zaman Khan. “Survey on development of expert system in the areas of: medical, education, automobile and agriculture.” 2015 2nd International Conference on Computing for Sustainable Global Development, , 2015
[13] Haider Khalaf Jabbar, Rafiqul Zaman Khan. “Survey on development of expert system in the areas of: medical, education, automobile and agriculture.” 2015 2nd International Conference on Computing for Sustainable Global Development, , 2015
[14] J. Fernández-Hernandez, et al, “Image based modelling from unmmaned aerialvehicle (UAV) photogrammetry an effective low cost tool for archaeological applications.” Archaeometry, vol. 57, no. 1, pp. 128–145, 2015. [15] J. Romeo, G. Pajares, M. Montalvo, J.M. Guerrero, M. Guijarro, J.M. de la Cruz.
“A new expert system for greenness identification in agricultural images.” Expert Systems with Applications, vol. 40, pp. 2275–2286, 2013.
Aeronautics and Astronautics, 2007.
[17] Lin, Z., “UAV for mapping-low altitude photogrammetric survey.” International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol.37-B1, pp. 1183-1186, 2008.
[18] M. D. Biasio, T. Arnold, and R. Leitner.“UAV based multi-spectral imaging system for environmental monitoring.” Technisches Messen Plattform für Methoden, Systeme und Anwendungen der Messtechnik., vol. 78, no. 11, pp. 503–507, 2011.
[19] Michael Livchitz, Abraham Abershitz, Uri Soudak, Abraham Kandel, “Development of an automated fuzzy-logic-based expert system for unmanned landing.” Fuzzy Sets and Systems, Vol. 93, pp.145-159, 1998.
[20] Molina P, Colomina I, Vitoria T, Silva P F, Skaloud J, Kornus W, Prades R, Aguilera C, “Searching lost people with UAVs: the system and results of the close-search project.” Int. Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, vol. 39(1), 2011.
[21] Ms. Neeta Verma, Yash Jindal, Rashi Aggarwal, Swati Jain. “An approach towards designing of car troubleshooting expert system.” International Journal of Computer Applications vol. 1, no. 23, 2010.
[22] Nana Yaw Asabere, Simonov Kusi-Sarpong. “Mves: A Mobile vehicle expert system for the automobile industry.” International Journal of Engineering Research and Applications vol. 2, issue 6, pp.1108-1123, 2012.
[23] Nwigbo Stella and Agbo Okechuku Chuks, “Expert system a catalyst in educational development in Nigeria.” Proceedings of the 1st International Technology, Education and Environment Conference, 2011.
[24] R. He, A. Bachrach, M. Achtelik, A. Geramifard, D. Gurdan, S. Prentice, J. Stumpf and N. Roy. “On the design and use of a micro air vehicle to track and
avoid adversaries.” The International Journal of Robotics Research, vol. 29, no. 5, pp. 529–546, 2010.
[25] The State of AI, Part 2 Expert Systems, Intelligent Gaming and Databases,
Virtual Personal Assistants. Available at: http://www.eidolonspeak.com/Artificial_Intelligence/StateOfAI_Part2-1.html
Accessed 1 January, 2015.
[26] Yuki Kuroki, George S. Young, Sue Ellen Haupt. “UAV navigation by an expert system for contaminant mapping with a genetic algorithm.” Expert Systems with Applications, vol. 37, 4687–4697, 2010.
![表 1 無人飛行載具相關應用領域與實例 應用領域 實例 災害應變 環境監測 交通管控 都市計畫 科學應用 商業娛樂 軍事運用 災情偵查[13]、災害救援[6]、物資運補[12] 空汙查勘[18]、溪流監測[18] 車輛流量管控[16]、道路監測[16] 都市變化調查[17]、地理拍攝[14] 通訊中繼站[4] 景觀拍攝[3]、包裹遞送[1] 戰地監控[24] 、遙控靶機[10] 第二節 研究動機 近年來無人飛行載具的應用廣受重視,以社群網站起家的 Facebook 以及網 路搜](https://thumb-ap.123doks.com/thumbv2/9libinfo/7421505.105594/9.892.208.686.114.461/空汙查勘景觀遙控靶機研究動機人飛行載具的應用廣受重視以社路搜.webp)