easily shown that the performance improvement is maximised when t = 2 . Larger arrays can be dealt with by breaking the array up into pairs. By substituting 2 for t into the above formula, we calculate that the performance improvement for the canonically recoded numbers is 12/11. Thus, the common-multiplicand multi- plication of n k-digit canonically recoded numbers takes nk x (U3) + (12/11) = llnk/36 0.306nkadditions.
0 IEE 1994
Elecironics Letters Online No: 19940623
C .
K. KOG and S. Johnson (Department of Electrical & Computer Engineering, Oregon State University Corvallis, Oregon 97331, USA) References14 March 1994
ARNO, s., and WHEELER, F.s.: ‘Signed digit representations of minimal Hamming weight’, IEEE Trans., 1993, (2-42, (S), pp. 1007-1010
E&CIOGLU, 0, and KW, C.K.: ‘Exponentiation using canonical recoding’, to be published in Theoretical Computer Science, 1994
KNUTH, D.E.: ‘The art of computer programming: Seminumerical algorithms. Vol. 2’ (Reading, MA: Addison-Wesley, Second edition, 1981)
KOREN, I.: ‘Computer arithmetic algorithms’ (Englewood Cliffs, N J Prentice-Hall, 1993)
R E m I E S N E R , G.W.: ‘Binary arithmetic’, Advances in Computers, 1960, 1, pp. 231-308
RIVEST, R.L., SHAMIR, A , and ADLEMAN, L.: ‘A method for obtaining digital signatures and public-key cryptosystems’, Commun. ACM, 1978, 21, (Z), pp. 120-126
YEN, s.-M., and LAIH, c.-s : ‘Common-multiplicand multiplication and its applications to public key cryptography’, Electron. Lett., 1993,29, (17), pp. 1583-1584
Scheduling parallel tasks
on
hypercubes
J.-F. Lin and
S.-J.
Chen
Indexing terms: Computer architecture, Parallel architectures, Scheduling
The authors consider the problem of non-pre-emptively scheduling independent parallel tasks with communication overhead on a d-dimensional hypercube system. To find a schedule such that the schedule length is minimised is NP-hard. Therefore, a simple heuristic algorithm is investigated and its performance bound is derived as (2 + In m - Um), where m = 2 4 Introduction: In the conventional scheduling problem, it is assumed that each task is processed in only one processor at a time. However in the parallel task scheduling problem [l, 2 , 4 , 5 ] , each task is worked on by more than one processor at a time. Assume we have a set of n independent parallel tasks T = { T i , T2,
...,
Tn} to he processed in a d-dimensional hypercube, and each task T, has a computation requirement f,. Then assume that each task T, is associated with a minimum parallelism dimension A2, that is, each task T, can he processed at most on a A.,-dimensional suhcuhe and this parallelism dimension, once decided for T , will not be altered during its processing. If a task is scheduled to run on a &dimensional suhcuhe, 1 s d, s A, s d, then d, will he called the scheduled dimension of T, and the execution time required byT, will he ( t , / 2 d 9 . For this problem type, a schedule is feasible if
the scheduled dimension d, of each task T, is no greater than its maximum parallelism dimension A,. A feasible schedule is called an optimal schedule if it has the shortest schedule length. A heu- ristic algorithm has a performance hound of i3 if (S,/S,) s
p
for all problem instances, where S, and So denote the heuristic sched- ule length and the optimal schedule length, respectively.Under the linear speedup assumption, Wang and Cheng [4] pro- posed an ECT (earliest completion time) algorithm for scheduling parallel tasks and derived a performance hound of (3 - 2 / m ) in which the number of processors required by each task and the number of processors m in systems are arbitrary. Zhu and Ahuja [5] proposed an LDF (largest dimension first) algorithm for sched-
ELECTRONICS LETTERS 26th May
1994Vol. 30
uling parallel tasks on hypercube systems and derived a perform- ance hound of ( 2
-
Urn), where m is the number of processors in the hypercube system.a
\ H execution time W communicaton time
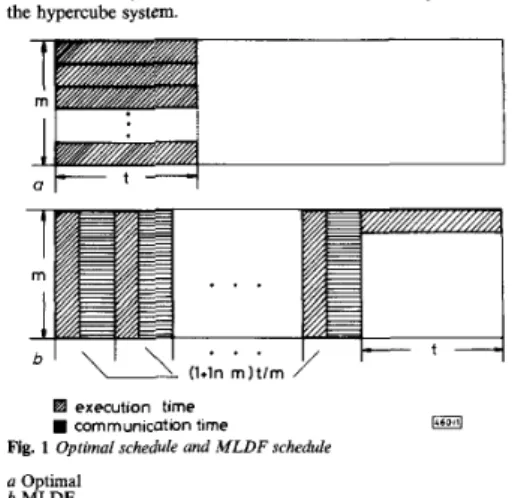
Fig. 1 Optimal schedule and MLDF schedule a Optimal
b MLDF
Decision of scheduled dimension: It is obvious that while a task T i s processed in parallel on a parallel machine, communication between processors is unavoidable. As a consequence, a linear speedup can never he achieved. In a hypercube system, because the average communication overhead is proportional to the dimension x of a suhcuhe on which a task T is processed [ 3 ] , the communication time required by each processor can be assumed to be Cx, where C is a given positive rational number. Thus, the total processing time P(x,t) required for processing a task T is equal to ( ( f / 2 ” )
+
Cx), where f is the computational requirement of task T. By simple calculus, we then have: JP(x,f)/Jx = <In 21 2 9 t + C and a2P(x,t)/Jx2 = [(In 2)z/2x]t. Because dP(x,t)/ax = 0 when x = log2[(ln 2 / C ) t ] and d2P(x,t)/dxz > 0, P(x,t) reaches its minimum value at x = log2[(ln 2/C)t]. Based on the derived result, our strategy is to make the scheduled dimension of task T equal to llog2[(ln u c ) t l l .Dimension-decision procedure: {Assign min{A,, [log,[(ln 2/c)tJ J } to the scheduled dimension d , of task T,, for i = 1, 2,
...,
n . ) Modified largest dimension first ( M L D F ) scheduling algorithm: Using the scheduled dimension d, determined for each task T, by the above dimension-decision procedure, a given set of n inde- pendent parallel tasks T = { T I , T,, ..., T.} can be decomposed into I p + I) subsets of tasks: P = {Tq, To2,...,
Tp,,}, = {TI*’, T,* , ..., T , , J 1 } ,...,
Ti = { T : , T:, ..., Fn,} and T o = {Tp, T2q...,
P n 0 } such that each task T, in T, has a scheduled dimension o f j , f o r j = 0, 1, 2, .__, p and i = 1, 2 ,
...,
n,, where p = max(d,, d2, ..., dJ, T = T P U P I U...
U T I U P , and n = n,+
nv,+
...+
n,+
no. M L D F algorithm: {Input task set T; call dimension-decision pro- cedure to find d , of each task T,; Divide task set T into (p+
1) task subsets P ,PI,
..., 71 andP,
where p = max{d,, 4 ,...,
d,}; Assign tasks to subcubes from task subset P toe}
Lemmn I: The number of free processors in the hypercube system will always he a multiple of the number of processors required by a task which is the next to he scheduled in the MLDF algorithm. Lemma 2 If task Tg, q s d, 1 s w s np, is finished at time S,, then there will be no processor idle before (S, - Sg), where S, and Sgdenote the schedule length of task set T scheduled by the MLDF algorithm and the processing time of task Tg, respectively. Theorem I : The performance bound of the MLDF algorithm is bounded by ( 2 + In m - Urn), and this bound is almost tight, where m = 24
Proofoftheorem I : Assume that task T$ is finished at time S,. By lemma 2,
where ti is the computation requirement of task
TI.
From the result of the dimension-decision procedure, we know that C 5 (InU21)t!; then,It is obvious that
and
where So is the optimal schedule length of task set T. Thus
5,;
6
so
Example: Let f , = f and A) = log, m for i = 1, 2,
...,
m - 1, t, = t and Am = I, and C = (In 2)tlm. Fig. l a and 6 show that the lengths of the optimal algorithm and the MLDF algorithm are f and [2 + In m - (l/m)(l + In m)]t, respectively. Thus, (SHISo) = (2+
In m ~1 lm) .
Acknowledgment: This research was supported by the National Science Council under grant NSC 82-04080E002-160.
0 IEE 1994
Electronics Letters Online No: 19940591
J.-F. Lin and S . J . Chen (Department of Electrical Engineering, National Taiwan University, Taiwan, Republic of China)
I4 March I994
References
1 CHEN, GI., and MI, T.H.: 'Scheduling independent jobs on hypercubes'. Proc. 5th Symp. Theoretical Aspects of Computer Science, 1988, pp. 273-280
2 DU, I., and LEUNG, J.Y.: 'Complexity of scheduling parallel task systems', SIAM J. Discrete Math.. 1989, 2, pp. 473487 3 HWANG, K : 'Advanced computer architecture: Parallelism,
scalability, programmability' (McGraw-Hill, 1993), p. 89 4 WANG, Q., and CHENG, K.H.: 'A heuristic of scheduling parallel tasks
and its analysis', SIAM J. Comput., 1992, 21, pp. 281-294 5 ZHU. Y, and AHUIA, M.: 'On job scheduling on a hypercube', IEEE
Trans. Parallel & Distributed Systems, 1993, 4, pp. 62-69
Singularity of Green dyadic for bi-isotropic
media
I.V.
Lindell and A.H. Sihvola
Indexing lerms: C h i d materials, Green funcrion method The singularity of the Green dyadic for the general bi-isotropic medium is constructed through decomposition of the bi-isotropic problem in two simple isotropic problems. It is Seen that, in contrast to the isotropic medium case, the singularity cannot be written in terms of a simple delta function term but it involves a second term containing the derivative of the delta function as well.
Introduction: The singularity of the Green dyadic corresponding to time-harmonic electromagnetic fields in isotropic media has been under investigation for the last 20 years because it plays a key role when numerical methods are applied to integral equation formula- tions of problems. Van Bladel recognised that, when computing
fields inside the source region, the field integral must be treated in a special way because of the inherent singularity of the Green function [I]. The result can be written in terms of a Green dyadic consisting of a principal-value part and a delta-function term. The principal value part gives the field from the source of which a con- tracting volume around the field point is extracted. The delta- function term gives the contribution from the source in the con- tracting volume. In the original formulation by Van Bladel the volume was spherical, which leads to the representation
G(r-r') = P V ( T + L V V ) G ( r - r ' ) - k2 'n(r-r') 3k2 (1) - with e - 3 k D G(r - r') =
-
D = J(r-
1') (r - r') ( 2 ) 47rDIn the 1970s there was much interest in the case when the con- tracting volume has a form other than spherical. In 1980, Yaghjian [2] and Lee et al. [3] (for another derivation see [4]) showed that eqn. 1 must be generalised to
-
G(r - r') = P V ( I + l V V ) G ( r - r') - L z 6 ( r
-
r') (3)k2 k2
The dyadic
L
depends on the form of the contracting volume and can be defined as(4) where n is the unit normal to the surface of the volume and U, the radial unit vector directed to the point of the normal vector n. The integration in eqn. 4 is over the whole spherical angle 4rr and the origin corresponds to the field point in question. For a sphere and any other surface with three-fold symmetry, we have
L=
T l 3 .In this Letter, we further generalise this theory to bi-isotropic media making it possible to apply integral equation methods to problems in such media.
Wavefield decomposition: The method of solution applies the well known decomposition of the electromagnetic fields in two wave- fields (also called self-dual fields or Bohren decomposition). The wavefields see the original bi-isotropic medium as effective simple isotropic media. Thus, we have two problems involving isotropic media and they can he readily solved. The fmal solution is obtained by combining the wavefield solutions. It is not necessary to describe the decomposition because it is well documented in [5]. Instead, we define the notation and briefly give the result.
If the bi-isotropic medium is defined through the constitutive equations D = EE
+
( s i n 8 - jn,),&H B = p H + (sin29 + j n , ) + E ( 5 ) (6) withthe electric field E due to an electric current source J in such a medium is
where
I?,
defines the electric Green dyadic.an isotropic medium of its own, defined by the parameters If the source is split in two parts J = J, + J., each of them sees
E* = E ( C O S B f n,)e*3" p+ = p(cos@ f n,)eTJ" ( 9 )
= qe?'" (10)
(11) k+ = w- = k(ws.9 f nv) qk =
The Green dyadic can then be split in two parts
G,(r
- r') =Ge+(r -
r')+
Ee-(r
- r') withwhere G.(r) are the isotropic Green dyadics corresponding to the two respective media: