行政院國家科學委員會專題研究計畫 成果報告
子計畫一:動態旅次起訖推估與預測(II)
計畫類別: 整合型計畫 計畫編號: NSC94-2218-E-009-015- 執行期間: 94 年 08 月 01 日至 95 年 07 月 31 日 執行單位: 國立交通大學統計學研究所 計畫主持人: 周幼珍 報告類型: 精簡報告 報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢中 華 民 國 95 年 11 月 5 日
Dynamic Origin-Destination Estimation and Its Parallel
Implementation
Yow-Jen Jou, David Bernstein, Chien-Lun Lan
Abstract —Origin-Destination (O-D) information is important in many transportation
related domains, such as transportation planning, urban and regional planning, traffic
assignment, and so on. Historical studies assumed that the transition matrix is known
or at least approximately known, which is unrealistic for a real world network. To
obtain real-time O-D information in a reasonable way, state space model with Gibbs
sampler and Kalman filter is then introduced by researchers. The Gibbs sampler
method mentioned above requires considerable quantities of iterations and takes
massive computation time, thus parallel computing method has been introduced to
increase the computing power. This paper implements parallel computation for the
O-D estimation algorithm on a Linux cluster and gives a numerical example which
shows a satisfying result.
Keywords — dynamic origin-destination, state space model, Gibbs sampler, traffic,
PC cluster
1. Introduction
such as transportation planning, urban and regional planning, traffic assignment, and
even pedestrian simulation (Bernstein, 1996, 1997, 2001; Chang, 1994, 1999, 2004,
2005; Jou, 2001,2002; Gao 2002; Lee 2001). The O-D matrix provides a planner with
the basic information for planning a transportation system (Nanda, 1993). Traditional
ways of acquire actual O-D information can be obtained by an extensive traffic survey,
including license plate recognizing, automatic vehicle identification, and so on; this is
not only a cumbersome process but also very costly. Real-time O-D information,
which plays an important role in Intelligent Transportation System (ITS), is not
possible to obtain by the traditional method. With real-time O-D information,
numerous high-value ITS applications e.g., just-in-time delivery, time shortest path
emergency vehicle routing and congestion avoidance would be feasible. Due to this
reason, researchers have been seeking estimation methods to derive valuable O-D
flow information from less expensive traffic data, mainly link traffic counts of
surveillance systems. The existing studies on this subject can be roughly divided into
two categories: 1) Assignment-Based Methods and 2) Non-Assignment-Based
Methods (Chang, 1995).
The concept of assignment-based methods is mainly extended from static O-D
estimation method. These methods based on the assumption of reliable descriptive
appears to address the complex time-dependent issues in urban networks effectively,
if the descriptive model mentioned above exists and a time-series set of actual O-D
information is available. Another approach is the non-assignment based method. The
key concept of this approach is to assume that each O-D parameter remains
approximately constant during consecutive intervals of measurements. Researchers
proposed a variety of estimation methods in this subject, and the primary difference
among all recursive algorithms for dynamic O-D estimation lies in their unique way
of computing filter matrix. The main strength of non-assignment-based method is the
capability of providing O-D information from surveillance system which would be
relatively accurate and less expensive cost.
Jou introduced state pace model into dynamic O-D estimation which estimates
both O-D matrices and transition matrix simultaneously without any prior information
of state variables, while most of the aforementioned studies assume that the transition
matrix is known or at least approximately known, which is unrealistic for a real world
network. Gibbs sampler, a particular type of Markov Chain Monte Carlo (MCMC)
method, has been introduced in the solution algorithm to overcome the shortcoming
of the assumption of known transition matrix. The solution algorithm requires
considerable quantities of iterations and takes massive computation time, thus parallel
The remainder of this paper is organized as follows, the dynamic origin-destination
estimation (DODE) by state space model is introduced in section 2, the parallel
implementation of DODE is addressed in section 3, and the conclusion is outlined in
the last section.
2. Dynamic Origin-Destination Estimation
State space model is introduced to estimate O-D flow from link traffic counts.
The standard state space model is coupled with two parts: transition equations and
observation equations. First, the state equation which assumed that the O-D flows at
time t can be related to the O-D flows at time t-1 by the following autoregressive
form, n t u Fx xt = t−1 + t, =1,2,3,..., (1)
wherex is the state vector which is unobservable, F is a random transition matrix, t
( )
0,Σ ~ p t Nu is independently and identically distributed noise term, where N p
denotes the p-dimensional normal distribution, Σ is the corresponding covariance
matrix. x the state variable, is defined to be the path flow belonging to an O-D pair.
Next, the observation equation,
n t
v Hx
yt = t + t, =1,2,3,... (2)
road network. The number of O-D pairs is denoted by p. H is a q× zero-one p
matrix, which denotes routing matrix for a network. vt is also a noise term that
( )
0,Γ ~ q t Nv . Both x and F are unobservable, thus Kalman filter is not suitable to
directly estimate and forecast the state vector. Hence, Gibbs sampler is used to tackle the problem of simultaneous estimation of F and xt by latest available information.
There are two major elements to be incorporated in the solution method, 1)
filtering states by observations, and 2) sampling scheme of F and state variables. Since the observations yt are not used in the conditional distribution, the Kalman
filter and the Gibbs sampler must be combined.
2.1 Kalman Filter
The Kalman filter is a system of recursions to estimate the state vector before a
new observation arrives, to forecast the observation, and to update the state vector as
the new observation is known. The structure of the filter can be derived in a Bayesian
framework as follows. The first stage (i.e. t =1), there’s no observation exists, thus the state vector x0 must be generated by a prior distribution that x0 ~Normal
(
µ0,V0)
, where µ0 is the mean and V0 is the covariance matrix. By using equation (1), thedistribution for the state vector in the first stage will be normal with parameters
1 | 1 1
|
t t t t t
1 | 1 | 1
|
t t t t t t
Var x⎣⎡ y−⎦⎤=V − =FV −F′+ Σ (4)
where µt t| 1− denotes the expect value of xt and Vt t| 1− denotes the variance of xt when yt−1 is observed. By the above information, the forecast observation would be
normal distribution with parameters
1 ˆ | 1 | t t t t t E y⎡⎣ y− ⎤⎦=y =Hµ − (5) 1 1 | t t t t Var y⎣⎡ y− ⎦⎤=M =HV−H′+ ϒ (6)
The above equation (3)-(6) holds for any t.
As the new observation yt become available, the parameter vector would be
updated according to Baye’s rule,
(
t| t)
(
t| t) (
t| t 1)
p x y ∝ p y x p x y−
by using Baye’s rule and standard Bayesian theory, the posterior will be normal
distribution with parameters
(
)
1 | | 1 | 1 | 1 t t t t Vt t H Mt yt H t t µ µ − µ − − ′ − = + − (7) 1 | | 1 | 1 | 1 t t t t t t t t t V =V − −V −H M′ −HV − (8)The algorithm of Kalman Filter is illustrated as follows,
Algorithm Kalman Filter
Input:µ0, V0, yt:=observation sequence
Output: Filtered µ and V Begin
FOR each time step of the observation sequence Generate prediction of the new observation by
1
ˆt t
(
1)
t t
M =H⋅ F V⋅ − ⋅F′+ Σ ⋅H′+ ϒ Update the parameter by
(
)
1 | | 1 | 1 | 1 t t t t Vt t H Mt yt H t t µ µ − µ − − ′ − = + − 1 | | 1 | 1 | 1 t t t t t t t t t V =V − −V −H M′ −HV − END FOR END 2.2 Gibbs SamplerThe Gibbs sampler is a technique for generating random variables from a
distribution indirectly, without having to calculate the density. In this paper, we make the following assumptions, 1) The initial x0 ~N
(
µ0,V0)
, 2) The covariance matrix Σ and ϒ are known, and 3) Given F, the distribution xt is Gaussian.The state equation can be written
1 t t t x′=x′−F′+µ′, t=1,2,…,n that is 1 0 1 1 n n n x x F x x µ µ − ′ ′ ′ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= ⎥ ′+⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢′ ′ ⎥ ⎢ ⎥′ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ M M M
The following notation is used for simplification. 1 n n x X x ′ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥′ ⎣ ⎦ M , 0 1 1 n n x X x − − ′ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ′ ⎥ ⎣ ⎦ M , 1 n U µ µ ′ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥′ ⎣ ⎦ M , F′=
[
F′ L F′ L F′]
Consider the element of the symmetric matrix( )
{
ij(
i, j)
}
(
) (
) (
)
(
) (
) (
)
(
)
( ) 1 ( ) 1 ( ) 1 ( ) 1 1 1 , ? ? ij i j n i n i n j n j n i n i n j n j i i n n j j S F F X X F X X F X X F X X F F F X X F F − − − − − − ′ ′ ′ = ′ − ′ ′ ′ − ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ = − − + − − where Fˆi(
Xn 1Xn 1)
1Xn 1Xn i( ) − − − −′= ′ ′ is the least square estimate of F ′i , and Xn i( ) is
the i-th column vector of Xn. Consequently,
( )
(
i ?i)
n 1 n 1(
j j)
S F′ = +A F′−F′′X − X′− F′−F′where A is a p×p matrix, A=
{ }
aij with(
( ) 1?) (
( ) 1)
ij n i n i n j n j
a = X′ −X′−F′′ X′ −X′−F′
That means, A is proportional to the sample covariance matrix. From the general
result in the Gaussian model, the posterior distribution of F ′ is then
(
)
( )
(
)
(
)
2 2 1 1 | , ? n n i i n n j j p F X S F F A F F X X F F − − − − ′ ∝ ′ − ∞ < ′< ∞ ′ ′ ′ ′ ′ ′ = + − − (9)The distribution in equation (9) is a matrix-variate generalization of the t-distribution.
The following sampler for generating F ′ and X is then proposed.
Sampling Scheme Generate from the conditional distributions a. xt|F x, t−1,Σ~N Fx
(
t−1,Σ)
b. | , ~(
, ,)
1 ( ) 2 1 1 2 1 1 2 p n n p n n n n F′ X Σ ⎣⎡k n p p ⎤⎦− A − X − X′− A+FX − X′−F′−The above sampling scheme would be the key component of the Gibbs sampler.
The Gibbs sampler is a Markovian updating scheme that proceeds as follows.
Given an arbitrary starting set of values Z1(0),Z2(0),Z3(0),...,Zk(0), and then draw
[
(0) (0)]
3 ) 0 ( 2 1 ) 1 ( 1 ~ Z Z ,Z ,...Zkvisited in the natural order and a cycle requires k random variate generations. After i
iterations we have (Z1(i),Z2(i),Z3(i),...,Zk(i)) . Under mild conditions, Geman and
Geman showed that the following results holds(Robert, 1998).
Result 1 Convergence
[
k]
i k i i i Z Z Z Z Z Z Z Z , , ,..., ) , , ,...,( 1() 2() 3() () → 1 2 3 and hence for each s, ]Zs(i) →[Zs
as i→∞. In fact a slightly stronger result is proven. Rather than requiring that each
variable be visited in repetitions of the natural order, convergence still follows any
visiting scheme, provided that each variable is visited infinitely often.
Result 2 Rate
Using the sup norm, rather than the L1 norm, the joint density of
) ,..., ,
,
(Z1(i) Z2(i) Z3(i) Zk(i) converges to the true density at a geometric rate in i, under
visiting in the natural order.
Result 3 Ergodic theorem
For any measurable function T of Z1,Z2,Z3,...,Zk whose expectation exits,
(
)
(
k)
i l l k l l l i i T(Z ,Z ,Z ,...,Z ) ET Z ,Z ,Z ,...Z 1 lim 1 2 3 1 ) ( ) ( 3 ) ( 2 ) ( 1 →∑
= ∞ →As Gibbs sampling through m replications of the aforementioned i iterations produces
k tuples
(
Z1(ij),Z2(ij),Z3(ij),...,Zkj(i))
(
j=1,2,3,...,m)
, which the proposed density estimate for[ ]
Z having form s[ ]
=∑
m=[
≠]
j j r s s Z Z r s m Z 1 ) ( , 1 ˆ .
variable forms the center part of the algorithm. In the process of generate state
variables, Kalman filtering mechanism is added. While a simple monitoring of the
chain (x(g)) can only expose strong non-stationarities, it is more relevant to consider the cumulated sums, since they need to stabilize for convergence to be achieved (Robert 1998). The solution algorithm with the time-complexity of
( )
2O n is shown
as follows,
Algorithm Gibbs Sampler
Input: H:= path observation incidence matrix− , yt:=observation sequence Output: Xˆ, Fˆ Begin Initialize (0) : p F =I , Σ =: Ip, ϒ =: IP
{ }
store X = ∅ , Fstore= ∅{ }
SET GibbsCount (g) to 0 WHILE not ConvergeGenerate ( )
(
)
~ , g x N µV Append ( )g x to XstoreCALL Kalman Filter with µ, V , and observation sequence Generate F ′( g) by
{ }
( ) ) ( g ij g a A = ,(
) (
(1) ( ))
) ( ) ( ) ( ) ( 1 ) ( ) ( ) ( ˆ ˆ g j g n g j n g i g n g i n g ij X X F X X F a = ′ − ′− ′ ′ ′ − ′− ′ Generate w~Wishart(
Xn(−g1)Xn′−(1g),n−p)
Generate Z =(
z1′,z2′,z′3,...,z′p)
,(
)
) ( , 0 ~ p g iid k N A z COMPUTE F g w Z 1 2 1 ) ( − ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ ′ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = ′APPEND ( )g
F ′ to Fstore
INCREMENT GibbsCount
END WHILE
READ last k items from Xstore and put in Xn
COMPUTE ˆ 1
n
X X
k
=
∑
READ last k items from Fstore and put in Fn
COMPUTE ˆ 1 n F F k =
∑
ENDAccurate O-D information is difficult to obtain on a real road network, thus other
O-D information must be considered for validation. A numerical test of the DODE
algorithm with the real data has been conducted by Jou (Jou, 2003). The algorithm is
implemented on the Mass Rapid Transit network in Taipei, which consists of nine
stations. The results are generally satisfactory, showing that also in the unknown
transition matrix case, significant estimates could be obtained.
3. The Implementation of Parallel Computation and its Results
Computation power is crucial to achieve real-time information requirement, thus
the parallel computing technique is then been introduced to satisfy this requirement.
The solution algorithm should be modified to adopt the parallel implementation. It is
different random seed, each computing part will lead to a different solution chain. The
chain in each computing part will then be gathered to check the convergence. In this
situation, communication between computing nodes is minimum, and computing
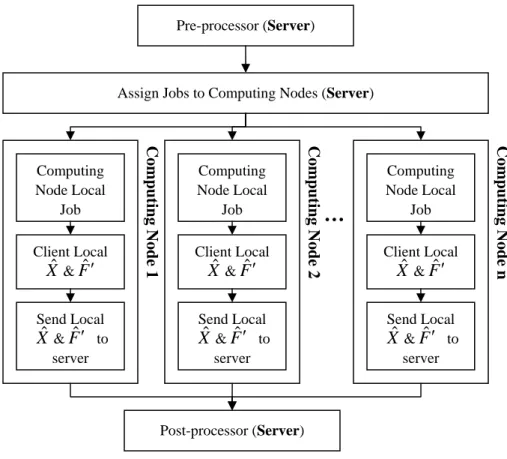
power can be easily increased without communication bandwidth limitation. Figure 1
describes the parallel architecture; a similar architecture had been proposed by Li (Li,
2002). In the pre-processor section, parameters used in our algorithm are initialized,
so does the necessary input data. When assign jobs, these input data are sent to
computing nodes in the cluster through TCP/IP base intranet with Message Passing
Interface (MPI) Library. The computational procedure for the parallel process consists
of:
Step 1. Load input data and parameters. Initialize MPI environment.
Step 2. Count the computing nodes exits in the cluster environment. Decide
the count of samples should be generated by each computing nodes.
Send data to each computing nodes.
Step 3. Each computing nodes generate its own Xˆ and F ′ˆ by given input
data for given times. And then send the result to server.
Step 4. After all the data been sent to server, the server check the convergence
by each Xˆ and Fˆ ′ . If converge, the server estimate the global Xˆ
Step 5. Stop MPI environment. Output data.
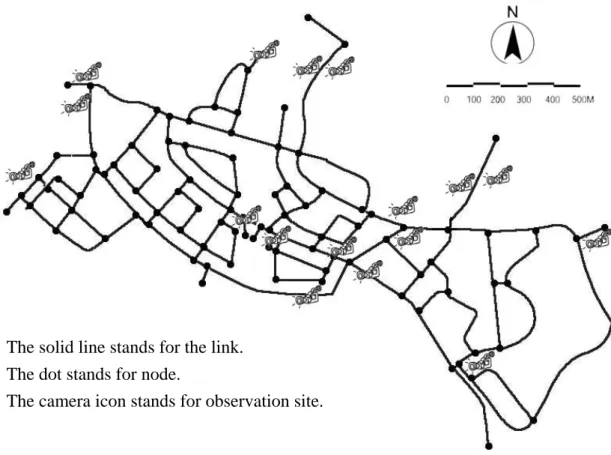
An empirical test is conducted on a part of real network located in Taiwan, the
HsinChu Science-based Industrial Park. The network is a closed network, with 11
entrances, which consists of 91 nodes and 244 links, shown as figure 2. There exist 17
observation sites on the network; the observation site updates traffic count every
minute.
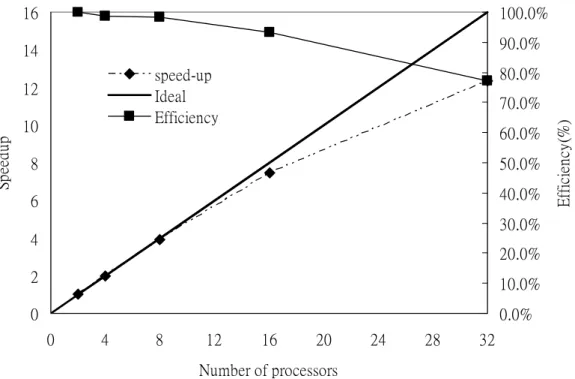
The parallel environment of this research consists of 16 computing nodes; each
contains 2 Intel XEON 3.2GHz processors and 1 GB memory. Nodes are connected
with a 1 Gigabits Ethernet switch for MPI protocol and a 100 Mbits PCI fast Ethernet
switch for Network File System (NFS) and Network Information System (NIS).
Figure 3 shows the speedups and efficiencies, where the speedups is the ratio of the
code execution time on a single processor to that on multiple processors and
efficiency is defined as the speedup divided by the number of processors(Gropp, 1999;
El-Rewini, 1998), of the parallel computing for 100 samples on the 32 CPU
Linux-cluster with MPI library. As shown in Figure 3, a quite good value of the
speedup and efficiency of the parallel scheme is achieved. That means we can
4. Conclusions
This paper introduced a dynamic origin-destination estimation method by state
space model. With Gibbs Sampler and Kalman filter, the algorithm loosens the
assumption of known transition matrix that exists in other studies. To satisfy the
real-time computation requirement of this algorithm, a parallel implementation on a
PC-based Linux cluster is conducted. The parallel implementation shows a good
result of nearly 80% of computing power remains for each CPU under a 32 CPUs
cluster environment. That leads to the conclusion: real-time estimation of O-D
matrices can be achieved by increasing a reasonable amount of CPUs.
Acknowledgement
This research was supported in part by the Ministry of Education of Taiwan, ROC
under Grants EX-91-E-FA06-4-4 and in part by the National Science Council of
Taiwan, ROC under Grants NSC-94-2218-E-009-015 respectively.
Authors
Yow-Jen Jou, Institute of Statistics, National Chiao-Tung University, Taiwan,
David Bernstein, College of Integrated Science and Technology, James Madison
Chien-Lun Lan, Department of Transportation Technology and Management, National
Chiao-Tung University, Taiwan, [email protected]
References
[1] C. K. Cater and R. Kohn, “Markov Chain Monte Carlo in Conditionally
Gaussian State Space Models”, Biometrika, Vol. 83, No. 3, pp.589-601, 1996.
[2] Christian P. Robert, “Discretization and MCMC Convergence Assessment”,
Springer, ISBN: 0-387-98591-3, 1998.
[3] D.A. bader, J. JaJa, R. Chellappa, “Scalable data parallel algorithms for texture
synthesis using Gibbs random fields”, IEEE Transactions on Image Processing,
Vol. 4, Issue 10, 1995.
[4] Daniel Sorensen, “Likelihood, Bayesian and MCMC methods in quantitative
genetics”, Springer-Verlag, 2002.
[5] David Bernstein, T.L. Friesz, Z. Suo and R.L. Tobin, “Dynamic Network User
Equilibrium with State-Dependent Time Lags”, Networks and Spatial Economics,
Vol. 1, pp. 319-347, 2001.
[6] David Bernstein, T.L. Friesz, “Infinite Dimensional Formulations of Some
Dynamic Traffic Assignment Models”, Network Infrastructure and the Urban
[7] David Bernstein, T.L. Friesz and R. Stough, “Variational Inequalities, Dynamical
Systems and Control Theoretic Models for Predicting Time-Varying Urban
Network Flows”, Transportation Science, Vol.30, pp.14-31, 1996.
[8] Gang-Len Chang, Xianding Tao, “Advanced computing architecture for
large-scale network O-D estimation”, Proceedings of the 6th 1995 Vehicle Navigation and Information System Conference, pp.317-327, 1995.
[9] Gnag-Len Chang, J. Wu, “Recursive estimation of time-varying
origin-destination flows from traffic counts in freeway corridors”, Transportation
Research 28B, pp.141-160, 1994.
[10] Gnag-Len Chang, X.D. Tao, “An integrated model for estimating time-varying
network origin-destination distributions”, Transportation Research, Vol. 33A
pp.381-399, 1999.
[11] H. El-Rewini, T. G. Lewis, “Distributed & Paralle Computing.”, Manning,
Greenwich, NY, 1998.
[12] Iljoon Chang, Gang-Len Chang, ”Calibration of Intercity Trip Time Value with a
Network Assignment Model: A Case Study for the Korean NW-SE Corridor”,
Journal of Transportation and Statistics, Vol. 5, 2002.
[13] Jodie Y. S. Lee, William H. K. Lam, and S. C. Wong, “Pedestrian Simulation
International Conference on Intelligent Transportation Systems, pp. 554-558,
2001.
[14] John H. Mathews, “Numerical Methods”, Prentice-Hall, ISBN: 0-13-626656-8,
1987.
[15] Pei-Yih Ting, R.A. Iltis, “Diffusion network architectures for implementation of
Gibbs samplers with applications to assignment problems”, IEEE Transactions
on Neural Networks, Vol. 5, Issue: 4, 1994.
[16] Pei-Wei Lin, Gang-Len Chang, Saed Rahwanji, “Robust Model for Estimating
Freeway Dynamic Origin-Destination Matrix”, Transportation Research Board,
2005.
[17] Pierre Bremaud, “Markov chains: Gibbs fields, Monte Carlo simulation, and
queues”, Springer, 1999.
[18] Raman Nanda, and Shinya Kikuchi, “Estimation of Trip O-D Matrix When Input
and Output are Fuzzy”, Proceedings of the IEEE International Symposium on
Uncertainty Modelling and Analysis, pp. 104-111, 2003.
[19] Song Gao, and Ismail Chabini, “Policy-Based Stochastic Dynamic Traffic
Assignment Models and Algorithms”, Proceeding of the IEEE International
Conference on Intelligent Transportation Systems, pp. 445-453, 2002.
Message-Passing Interface.”, MIT Press, Cambridge, MA, 1999.
[21] Yow-Jen Jou, Ming-Chorng Hwang and Jia-Ming Yang, “A Traffic Simulation
Interacted Approach for the Estimation of Dynamic Origin-Destination Matrix”,
IEEE International Conference on Networking, Sensing and Control, Vol. 2,
2004.
[22] Y. Li, S.M. Sze and T.-S. Chao, “A Practical Implementation of Parallel
Dynamic Load Balancing for Adaptive Computing in VLSI Device Simulation”,
Engineering with Computers, Vol. 18, pp. 124-137, 2002.
[23] Y.J. Jou, M.C. Hwang, Y.H. Wang, and C.H. Chang, “Estimation of Dynamic
Origin-Destination by Gaussian State Space Model with Unknown Transition
Matrix,” 2003 IEEE International Conference on Systems, Man & Cybernetics,
5-8 Oct. 2003, Washington, D.C., USA.
[24] Yow-Jen Jou, Ming-Chorng Hwang, “Rapid Transit System Origin-Destination
Matrix Estimation”, 2002 World Metro Symposium & Exhibition, Taipei, April
2002.
[25] Yow-Jen Jou, “Rapid Transit System O/D Pattern Calculation with Statistical
Gibbs Sampling and Kalman Techniques”, Conference on Computational Physics
Figure 1. The flow chart of parallel algorithm
Pre-processor (Server)
Assign Jobs to Computing Nodes (Server)
Computing Node Local Job Client Local Xˆ &Fˆ ′ Send Local Xˆ &Fˆ ′ to server Computing Node Local Job Client Local Xˆ &Fˆ ′ Send Local Xˆ&Fˆ ′ to server Computing Node Local Job Client Local Xˆ &Fˆ ′ Send Local Xˆ &Fˆ ′ to server
…
Computing Node 1 Post-processor (Server)Figure 2. The test network.
The solid line stands for the link. The dot stands for node.
0 2 4 6 8 10 12 14 16 0 4 8 12 16 20 24 28 32 Number of processors Sp ee dup 0.0% 10.0% 20.0% 30.0% 40.0% 50.0% 60.0% 70.0% 80.0% 90.0% 100.0% E ffi ci en cy (% ) speed-up Ideal Efficiency