國 立 交 通 大 學
電子工程學系 電子研究所碩士班
碩 士 論 文
感知無線網路下基於累和式演算法之頻譜變化即時
偵測研究
CUSUM-Based Quickest Spectrum Detection in Cognitive
Radio Networks
研 究 生: 劉藹璇
指導教授: 簡鳳村 博士
感知無線網路下基於累和式演算法之頻譜變化即時偵測研究
CUSUM-Based Quickest Spectrum Detection in Cognitive Radio
Networks
研 究 生: 劉藹璇 Student: Ai-Hsuan Liu
指導教授: 簡鳳村 博士 Advisor: Dr. Feng-Tsun Chien
國 立 交 通 大 學
電子工程學系 電子研究所碩士班
碩 士 論 文
A Thesis
Submitted to Department of Electronics Engineering & Institute of Electronics College of Electrical and Computer Engineering
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of
Master of Science
in
Electronics Engineering July 2010
Hsinchu, Taiwan, Republic of China
感知無線網路下基於累和式演算法之頻譜變化即時
偵測研究
研究生:劉藹璇 指導教授:簡鳳村 博士
國立交通大學
電子工程學系 電子研究所碩士班
摘要
在本篇論文,我們從序列式即時變化偵測的觀點來探討感知無線電網路頻帶偵 測問題。為了能增進感知網路中次要使用者與主要使用者之間的共存性,我們提出 以「累積和程序」為基礎之演算法,在利用已知主要使用者之初始訊號結構下,能 有效且即時地偵測到主要使用者的重新運作並歸還次要使用者投機使用之頻帶資源 以避免對主要使用者造成嚴重干擾。我們特別考慮感知使用者與主要使用者之間存 在衰變通道且於接收端僅知通道統計特性下累和式即時變化偵測的可行性。 我們首先考慮一個由單一主要使用者和單一次要使用者所構成的感知無線電網 路。在考慮衰變通道效應之下,我們從非同調與同調的角度出發各別提出以累積和 程序為基礎的即時偵測演算法。並於第二階段,在考慮各種分散式協作機制之下, 將先前所提出的累和式演算法推演於由多個次要使用者共同參與之合作式偵測,以 期能進一步地藉由多重使用者所提供的空間多樣性以增進即時偵測主要使用者活動 的效能表現。在模擬中,我們在主要使用者的訊號模型上採取了 IEEE 802.16e 的長 同步碼做為序列偵測的目標,並且在各種衰變環境下驗證並比較所提之累和式演算 法的可行性與效能表現。CUSUM-Based Quickest Spectrum Detection in
Cognitive Radio Networks
Student: Ai-Hsuan Liu Advisor: Dr. Feng-Tsun Chien
Department of Electronics Engineering
Institute of Electronics
National Chiao Tung University
Abstract
In this thesis, we study the problem of spectrum sensing in cognitive radio networks from the view of sequential change-point detection (also called quickest detection). Aiming at avoiding interference to licensed primary users, which can help promote the willingness of the primary systems to accept the idea of coexistence with cognitive users, we propose several cumulative-sum (CUSUM)-based algorithms for detecting as quickly as possible the event that the dormant primary systems start reclaiming the use of the spectrum by exploiting the feature of the incipient part of the primary signals. Particularly, we are interested in the applicability of CUSUM-based tests to the coexistence problem when considering the fading effects between the cognitive and the primary user, given only the statistical channel information.
In the first part of the thesis, we consider the single-user scenario and propose four CUSUM-based algorithms according to different perspectives and manners on the fading effects under flat fading or frequency-selective fading environments. In the second part of the thesis, we extend the proposed CUSUM-based algorithms to the case of cooperative quickest detection, where a number of cognitive users provide decision strategies and collaboratively detect the beginning of the reclaims of the primary signals. In the
simulations, we demonstrate the effectiveness of the proposed algorithms with the settings defined in IEEE 802.16e as the primary signal model. Comparisons of the proposed CUSUM-based algorithms are also provided in the simulations.
誌謝
碩士生涯隨著論文的告終即將步入尾聲,心中有許多感謝。 回首這三年不算短的時光,最先要感謝的是我的指導教授簡鳳村老師,無論是 課程學習及學術研究上的啟蒙與指導、學習資源上的不吝提供、更甚於待人接物的 道理與生涯規畫的指引,老師總是耐心地適時提點與給予幫助,真的由衷感謝老師對我 的一切照顧。謝謝林大衛教授在研究過程中於創意和想法上的激勵與建議。 特別要感謝評委們─王鵬華教授、丁建均教授、張敏寬教授細心的審閱,因為 您們的建議與勘誤,讓這本論文更加完整。 謝謝大學同學兼好夥伴們─玉婷、佳龍、思翰,很慶幸能和善良又優秀的你們 成為同伴,也謝謝你們在我最需要幫助時給予我誠摯溫暖的支持和幫助,我會一直 記得患難中的真情陪伴。 謝謝學妹們─婉瑜和怡茹,可愛的你們讓我的碩士生涯增添許多愉快的時光, 祝福你們研究順利。 謝謝通訊電子與訊號處理實驗室的學長、同伴、學弟妹們,雖然無法一一致謝, 但因著你們我的碩士生活才會有許多溫馨和有趣的回憶。 謝謝重佑,你對研究的熱誠和專注總是默默的鼓舞我持續前進,在研究過程中 也時常扮演著一同審視想法、邏輯和作法上是否合理正確的同伴角色。謝謝你充滿 勇氣地陪我走過那些非常人所能跨越的荊棘與困境。 最後,我要感謝我的家人,謝謝你們一直以來的支持,也因為你們的辛勤付出 我才能無所顧慮地完成學業,也期許今後我能為這個家庭更盡一份心力。 謹將此篇論文獻給所有在我的人生旅途中給我鼓勵與祝福的你們。 劉藹璇 誌於新竹 民國九十九年七月Contents
1 Introduction 1
1.1 Motivation . . . 1
1.2 Why Quickest Detection? . . . 2
1.3 Related Work . . . 3
1.4 Contributions of the Research . . . 5
2 Cognitive Radio and CUSUM-Based Quickest Detection Preliminary 8 2.1 Cognitive Radio . . . 8
2.2 CUSUM-Based Quickest Detection . . . 10
2.2.1 A Simple Case - Concept and Page’s CUSUM Algorithm . . . 10
2.2.2 Extension to Composite Hypothesis Cases . . . 15
2.2.3 Dependent Observations . . . 17
3 CUSUM-Based Quickest Detection for Cognitive Coexistence 18 3.1 Problem Setup . . . 18
3.2 Non-Coherent Approaches . . . 20
3.2.1 Classical CUSUM Algorithm . . . 21
3.2.2 Extension to Frequency-selective Fading Case . . . 23
3.2.3 Modified Window-limited Version . . . 24
3.2.4 Weighted CUSUM Algorithm . . . 25
3.3 Coherent Approaches . . . 27
3.3.1 GLRT-Based CUSUM Algorithm . . . 28
4 Cooperative CUSUM-Based Quickest Detection in Cognitive Sensors
Net-work 31
4.1 Problem Setup . . . 31
4.2 Centralized Case: Global CUSUM Algorithm . . . 33
4.3 Decentralized Case: Hard Fusion of Local CUSUM . . . 35
4.4 Decentralized Case: Global CUSUM with Quantized Local Decision . . . 36
5 Simulations 39 5.1 Simulation Setup . . . 39
5.2 Effectiveness of Proposed CUSUM-based Algorithms . . . 39
5.2.1 Single-user Scenario . . . 41
5.2.2 Multiuser Scenario . . . 44
6 Conclusion and Future Work 59 6.1 Conclusion . . . 59
6.2 Future Work . . . 60
List of Figures
2.1 Simplified Cognition Cycle. . . 9
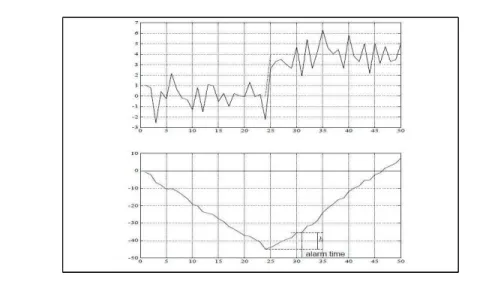
2.2 Typical behavior of the log-likelihood ratio Skcorresponding to a change in the
mean of a Gaussian sequence with constant variance : negative drift before and
positive drift after the change. (Fig.2.5 of [1]) . . . 11
3.1 A sketch map of the spectrum sensing problem aiming to detect the reoc-cupying of underlying primary system as quickly as possible. . . 19 4.1 A sketch map of the spectrum sensing problem aiming to detect the
reoc-cupying of underlying primary system as quickly as possible in a cooper-ative multiuser network. . . 32 5.1 Performances of non-coherent approaches in single-user scenario under
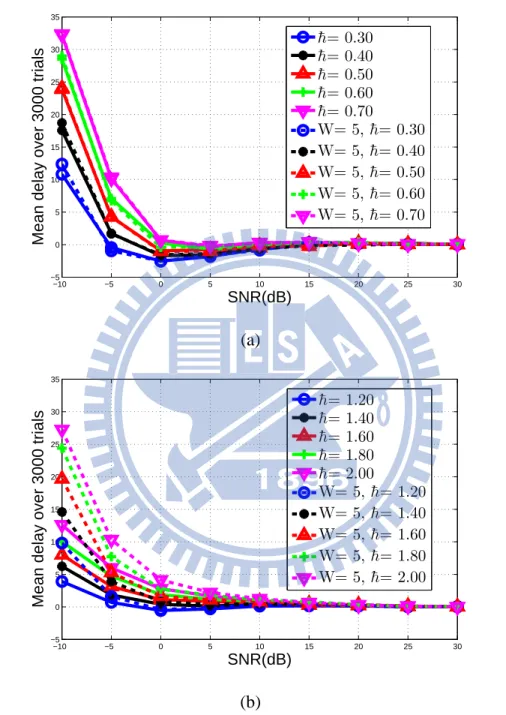
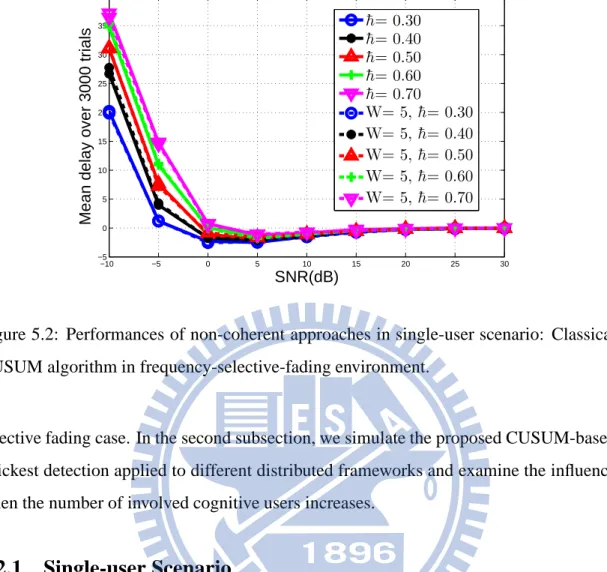
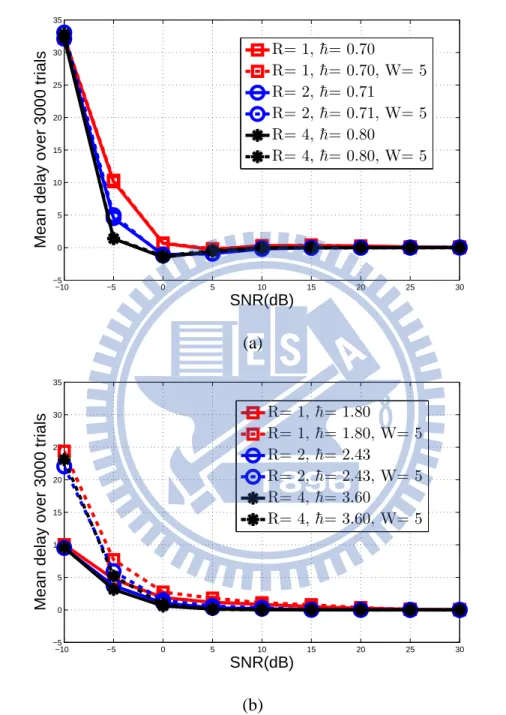
flat-fading environment. (a) Classical CUSUM algorithm. (b) Weighted CUSUM algorithm. . . 40 5.2 Performances of non-coherent approaches in single-user scenario:
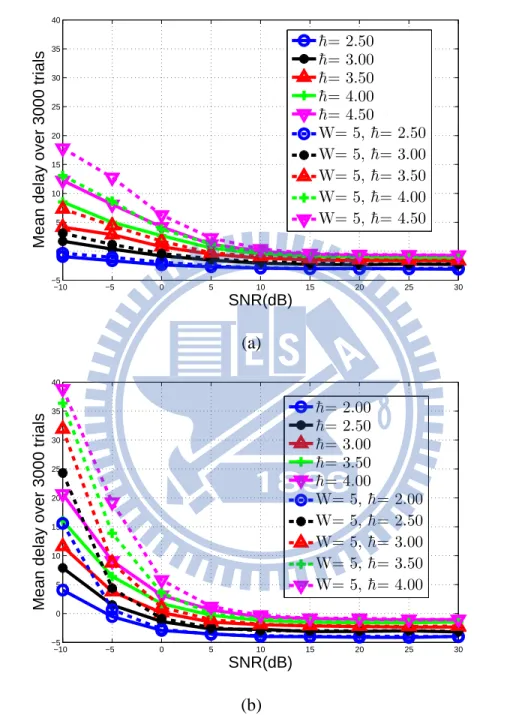
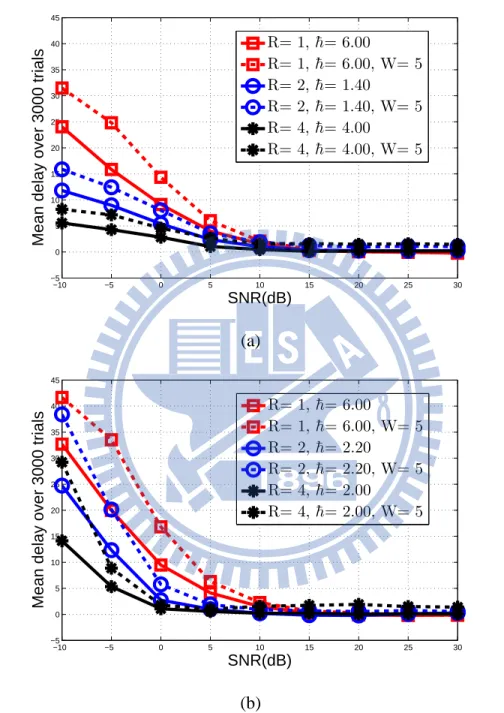
Clas-sical CUSUM algorithm in frequency-selective-fading environment. . . . 41 5.3 Performances of coherent approaches in single-user scenario under
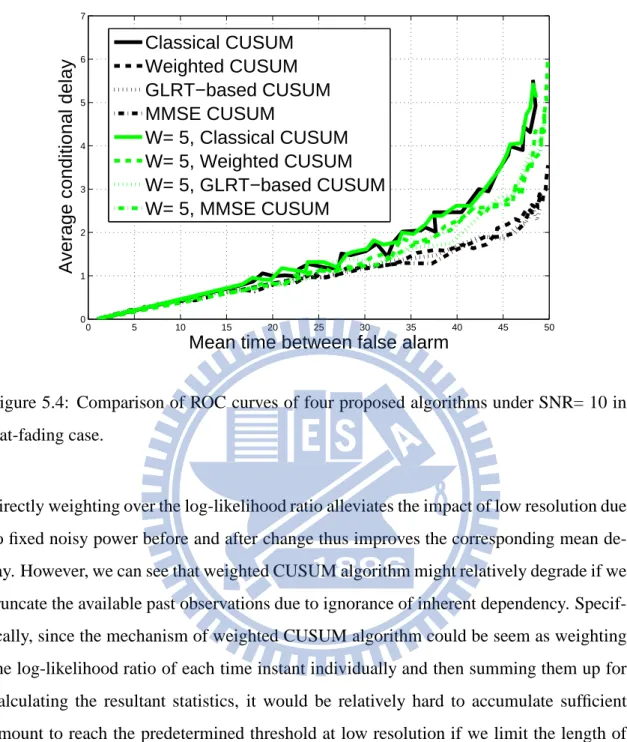
flat-fading environment. (a) GLRT-based CUSUM algorithm. (b) MMSE-based CUSUM algorithm. . . 42 5.4 Comparison of ROC curves of four proposed algorithms under SNR= 10
5.5 Performances of cooperative schemes by non-coherent approaches in cen-tralized case under flat-fading environment. (a) Classical CUSUM. (b) Weighted CUSUM. . . 47 5.6 Performances of cooperative schemes by coherent approaches in
central-ized case under flat-fading environment. (a) GLRT-based CUSUM. (b) GLRT-based CUSUM. . . 48 5.7 Performances of cooperative classical CUSUM algorithm in centralized
case under frequency-selective fading environment. . . 49 5.8 Performances of cooperative schemes by non-coherent approaches in
de-centralized case by hard-fusion of local CUSUM under flat-fading envi-ronment in the scheme that sensors updates just for once. (a) Classical CUSUM. (b) Weighted CUSUM. . . 50 5.9 Performances of cooperative schemes by coherent approaches in
decen-tralized case by hard-fusion of local CUSUM under flat-fading environ-ment in the scheme that sensors updates just for once. (a) GLRT-based CUSUM. (b) GLRT-based CUSUM. . . 51 5.10 Performances of cooperative classical CUSUM algorithm in
decentral-ized case by hard-fusion of local CUSUM under frequency-selective fad-ing environment in the scheme that sensors updates just for once. . . 52 5.11 Performances of cooperative schemes by non-coherent approaches in
de-centralized case by hard-fusion of local CUSUM under flat-fading en-vironment in the scheme that sensors updates at each time instant. (a) Classical CUSUM. (b) Weighted CUSUM. . . 53 5.12 Performances of cooperative schemes by coherent approaches in
decen-tralized case by hard-fusion of local CUSUM under flat-fading environ-ment in the scheme that sensors updates at each time instant. (a) GLRT-based CUSUM. (b) GLRT-GLRT-based CUSUM. . . 54 5.13 Performances of cooperative classical CUSUM algorithm in
decentral-ized case by hard-fusion of local CUSUM under frequency-selective fad-ing environment in the scheme that sensors updates at each time instant. . 55
5.14 Performances of approximation method in decentralized case applying global CUSUM with quantized local decision under perfect channel be-tween sensors and the fusion center. (a) 1-bit quantization, R=2. (b) 1-bit quantization, R=4. (c) Comparison of the cases (1) R=2 with 1-bit quan-tization (2) R=4 with 1-bit quanquan-tization (3) R=2 with 2-bit quanquan-tization (4) R=4 with 2-bit quantization. . . 56 5.15 Performances of approximation method in decentralized case applying
global CUSUM with quantized local decision under binary symmetric channel with cross-error= 0.2 between sensors and the fusion center. (a) 1-bit quantization, R=2. (b) 1-bit quantization, R=4. (c) Comparison of the cases (1) R=2 with 1-bit quantization (2) R=4 with 1-bit quantization (3) R=2 with 2-bit quantization (4) R=4 with 2-bit quantization. . . 57 5.16 Performances of approximation method in decentralized case applying
global CUSUM with quantized local decision under AWGN channel with received SNR= 10dB between sensors and the fusion center. (a) 1-bit quantization, R=2. (b) 1-bit quantization, R=4. (c) Comparison of the cases (1) R=2 with 1-bit quantization (2) R=4 with 1-bit quantization (3) R=2 with 2-bit quantization (4) R=4 with 2-bit quantization. . . 58
Chapter 1
Introduction
1.1
Motivation
Recently, cognitive radio has emerged as a feasible approach to alleviate the problem that most of the allocated radio spectrum are used sporadically and utilized inefficiently in wireless communications applications [2]. Generally speaking, a cognitive radio is a software-defined radio aware of its environment and autonomously adapting its operations to achieve desired objectives in response to unexpected variations. Many kinds of possi-ble mechanisms have been proposed for promising better system efficiency and spectrum utilization. One main approach is to concede unlicensed cognitive users to opportunisti-cally use those frequency spectrum yielded by underlying idle licensed primary users to improve the efficiency of current spectral utilization. In this case, under the concern of possible interference to primary users, cognitive users should assure that they could fairly detect the activities of primary users and try to avoid interference to the primary licensed users as much as possible, which can help promote the willingness of the primary sys-tems to accept the idea of coexistence with unlicensed cognitive users. Specifically, the effectiveness of detection strategy applying in cognitive radio networks has been one of the key factors that the opportunistic mechanism is workable of increasing the efficiency in two main aspects. One is that the cognitive users have to know whether there exist pri-mary users transmitting or not before opportunistic uses, and the other issue is to vacate frequency bands as quickly as possible when primary user reclaiming the use of the
spec-trum. This corresponds to the following two types of spectrum detection (or commonly termed as spectrum sensing) problems in cognitive radio networks:
• Detecting the existence of spectrum holes in order to opportunistically use that spec-trum vacancy.
• Detecting the retransmission of primary users in a spectrum currently used by a cognitive user and determine the time instant at which the retransmission starts. There have been plenty of research studies that apply the conventional block-based detection to the detection problems mentioned above in cognitive radio networks [3]. However, the fact that the efficiency of speculative spectrum utilization would be en-hanced if we could detect as quickly as possible the idling bands, and that the interference to the primary users could be avoided as much as possible if a cognitive user is capable of perceiving the restart of transmission of the primary user excites our interest in the applicability of sequential detection on cognitive radios.
On the other hand, prior information about primary user’s incipient signaling struc-tureis sometimes available to public in existing licensed systems such as WiMAX sys-tems. In this situation, it is possible to enhance the efficacy in awareness of the reoccu-pying of primary user by exploiting features of the frame structure in cognitive detection. In the thesis, combined with the aim to responding as quickly as possible the activities level of primary users, we are interested in contriving effective detection strategies that make use of known feature of primary signaling in sequential manner for promoting the cognitive coexistence.
1.2
Why Quickest Detection?
Most research and development about spectrum sensing in cognitive radios concentrate on classical block-based detection schemes such as energy detection, feature detection or matched filtering [3]. In these schemes, cognitive users always collect a succession of observations within a fixed sensing time window, and then calculate corresponding test statistics for decisions. Most of them put emphasis on maximizing probability of
de-tection while maintaining an acceptable level of false alarm rate, particularly in
detect-ing whether there is spectrum hole existdetect-ing in the environment for possible opportunistic cognitive transmissions. On the other hand, when focusing on detecting primary user’s retransmission activity and striving at avoiding interference to primary users by vacat-ing frequency bands that are occupied by cognitive users as soon as retransmission of underlying primary users occurs, the delay between the estimated time instant and the true primary user’s retransmission time instant becomes a crucial index to the feasibility of cognitive mechanisms. However, due to the inherent nature of block-based detection, this delay performance of detection has not been addressed in the conventional meth-ods [4], [5], [6], and [7]. Thus, this motivates us to study the applicability of sequential-type detection, especially the change-point detection (also called quickest detection), in dealing with the detection problem in cognitive networks.
Quickest detection is a branch topic of sequential-type detection [8], [1]. Conceptu-ally, the idea is to detect changes in distribution of observations as quickly as possible, which coincides the aim that secondary users should detect the change in the activity level of the primary users immediately. In contrast to block-based approaches, mean delay of detection is an essential performance index in sequential change-point detection. This property makes the quickest detection as an appropriate framework for dynamic spectrum sensing in cognitive radio networks.
1.3
Related Work
The problem of detecting an abrupt change was first studied by Page in the context of quality control [9]. In the conventional formulation of the change-point detection prob-lem, there is a sequence of observations whose distribution changes at some unknown point in time, and the goal is to detect this change as quickly as possible subject to false alarm constraints. In the simplest situation where the observations are independent and identically distributed (i.i.d.) with known distributions before and after the change, the problem is well understood and has been solved under a variety of criteria since the sem-inal work by Page. Under minimax formulation, which is first proposed by Lorden [10],
the well-known Page’s cumulative sum (CUSUM) algorithm has been proved to be opti-mal1in the sense of minimizing the mean delay of detection while maintaining a certain
level of false alarm rate [11] and [12].
The extension to composite hypotheses testing problems where the distributions of ob-servations before or after change are not completely specified could be found in [10], [13] and [14]. In [15], the authors consider the problem of detecting a change from one given stationary and ergodic stochastic process to another such process. Change-point detec-tion involving dependent observadetec-tions is discussed in [16], where the authors shows that Page’s CUSUM procedure is still asymptotically minimax optimal for dependent obser-vations under some conditions which are difficult to verify in general. Although it is easy to extend the CUSUM decision rule for dependent observations by replacing statistics by conditional density as proposed in [15] and [16], it has been an open problem concerning whether the asymptotic optimality2of the CUSUM rule still holds as commented in [17]. The first generalization of the CUSUM detection procedure regarding multichannel and distributed systems is proposed in the work by Tartakovsky [18] and further extended and discussed in [19] where asymptotically optimal procedures for two distributed scenar-ios are presented based on i.i.d. local observations before and after change. In work [20], also concerning the simplest case with i.i.d. local observations, the author proves that a CUSUM procedure based on binary-quantized data with a monotone likelihood ratio quantizer (MLRQ) is asymptotically optimal under a condition on second moments in the system with limited local memory and develops asymptotic theory in the system with full local memory. The case that there exists unknown parameter in the post-change detection as further extension in the distributed multisensor setting with binary quantization is
ad-1In the sense that the stopping time of CUSUM procedure minimizes the worst average conditional
delay (t0 denotes the change time and ta denotes the alarm time)τ¯∗ = supt0≥1esssupEθ1(ta − t0 +
1|ta ≥ t0,F
t0−1
1 ), whereF
t0−1
1 is the filtration, namely the smallest σ-field with respect to observations
y1, . . . , yt0−1 and the essential supremum (esssup) means the worst case detection delay, for a fixed mean
time between false alarm ¯T = Eθ0(ta)
2An optimal algorithm for change detection is any algorithm that minimizes the worst mean conditional
delay for detectionτ¯∗ for a fixed mean time between false alarm ¯T and an algorithm is asymptotically
dressed in [21]. In [22], Tartakovsky proposes nonparametric multi-chart CUSUM test for the rapid intrusion detection applied to general stochastic models in multichannel sensor systems and show that the proposed multi-chart detection procedure typically performs significantly better than single-channel counterparts.
Under cognitive radios setup, the authors in [23] introduce using generalized like-lihood ratio (GLR) test combined with parallel CUSUM algorithm and propose a suc-cessive refinement to tackle the problem with unknown amplitude of primary signals, which consist of mutually independent sequence before and after change. And, scenar-ios with different information levels about primary users known by cognitive users are considered in [24], in which GLRT-based algorithm and non-parametric approach are de-veloped based on mutually independent homogeneous gaussian distributed signal model. The work in [25] deals with the spectrum detection problem by introducing the CUSUM-based quickest detection with hidden Markov Models (HMMs). Related work of coop-erative spectrum sensing based on CUSUM procedure can be found in [26] and [27], both based on i.i.d. local observations. In [26], collaborative quickest detection in an ad hoc network, where no data fusion center is needed and collaboration among sensors is through information exchange, is proposed for multi-node case. Cooperative spectrum sensing schemes applying linear test on CUSUM statistics for exempting the need of es-timation of unknown parameters in post-change distribution are provided in [27] under different distributed scenarios.
1.4
Contributions of the Research
Aiming at avoiding interference to licensed primary users, which can help promote the willingness of the primary systems to accept the idea of coexistence with cognitive users, we propose several cumulative-sum (CUSUM)-based algorithms that exploits the feature of the incipient part of the primary signals for detecting as quickly as possible the event that the dormant primary systems start reclaiming the use of the spectrum. Particularly, our formulation captures possible fading effects between the cognitive and the primary user given only the statistical channel information at the receiver end.
Contrast to the homogenous-distributed and independent observations after change that are commonly assumed in conventional quickest detection, the detection problem we deal with involves non-homogenous and innately dependent observations after the reoccupying of the coexisting primary system. To tackle the problem, we first con-sider the single-user scenario and propose four CUSUM-based algorithms depending on different assumptions on the fading environments. Specifically, we call the four pro-posed algorithms as the classical CUSUM, weighted CUSUM, GLRT-based CUSUM, and MMSE-based CUSUM algorithms, which are briefly described as follows. In the classical CUSUM algorithm, we treat the unknown channel factors as random variables with known prior statistics and calculate the likelihood ratio between joint probability density functions of observations under the conditions before and after the reclaiming occurs. While in weighted CUSUM and GLRT-based CUSUM algorithm, we consider the unknown channel coefficient as deterministic but unknown constant during the detec-tion process. We weight the likelihood ratio by applying prior informadetec-tion as weighting function and estimate the unknown parameter through all available observations. The es-timates are then substituted into the likelihood. Depart from the philosophy employed by the GLRT-based CUSUM algorithm, the MMSE-based CUSUM algorithm is to estimate the unknown fading coefficient by incorporating prior knowledge. We also examine the required length of backward observations that keeps comparable efficacy with the one without any curtailment of observational window.
Further, we extend the proposed CUSUM-based algorithms to the case of cooperative quickest detection, where a number of cognitive users provide decision strategies and col-laboratively detects instantaneously the beginning of the reclaims of the primary signal under three different distributed frameworks. The first distributed scenario is in central-ized setting, which means that the original data received at sensors are sent completely to a fusion center where a final decision is made based on all sensor massages for global CUSUM test. In the cases considering decentralized framework, we resort to hard fu-sion of local CUSUM and global CUSUM with quantized local decifu-sion. In hard fufu-sion of local CUSUM scheme, we assume that each of the cooperative sensors has sufficient memory to individually perform CUSUM-based quickest detection then the fusion center
makes final decision based on local decisions sent by sensors according to hard-decision combining rules. In the decentralized scheme considering global CUSUM with quantized local decisions, we propose using an approximation on distributions of the received signal after reoccupying to tackle the quantization at the local sensors, and the CUSUM-based algorithm is performed at the fusion center while the local sensors are assumed memory-less and send quantized version of their observations for decision making.
In the simulations, we demonstrate the effectiveness of the proposed algorithms with the settings defined in IEEE 802.16e as the primary signal model. Comparisons of the proposed CUSUM-based algorithms are also provided in the simulations.
To sum up, the contributions of the research include:
• We deal with the spectrum sensing problem under fading environments in a sequen-tial detection viewpoint, which involves non-homogenous distributed and innately mutually dependent observations after the reoccupying of the coexisting primary system. This problem has not been studied before. Although the work in [25] also discusses quickest spectrum detection with dependent observations after change, the dependency among the observations lies on the sampling of the wideband power spectrum density. They first train the corresponding HMM parameters of specific primary signal and then perform quickest pattern cognition, which heavily depends on the Markov properties in calculating statistics, to detect the appearance of a predefined pattern as quickly as possible. While in our proposed schemes, the de-pendency among observation sequence is due to possible frequency selective fading effects.
• We develop several effective change detection strategies based on CUSUM proce-dure with practical assumptions. In addition, we also propose cooperative schemes as further extension. By simulation, we demonstrate the effectiveness of the pro-posed algorithms either under flat fading or frequency-selective fading case.
Chapter 2
Cognitive Radio and CUSUM-Based
Quickest Detection Preliminary
2.1
Cognitive Radio
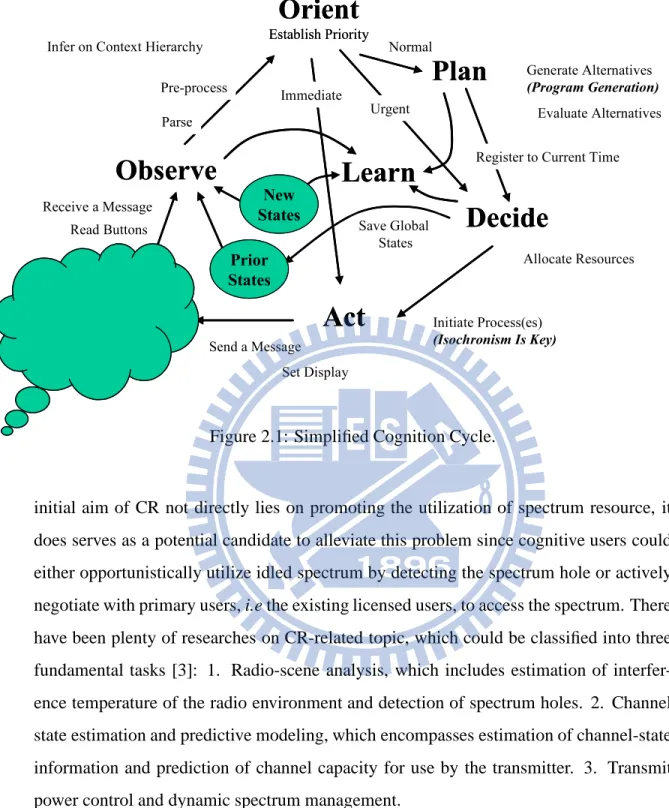
Cognitive radio technology, which is first proposed by Mitola in [2], has emerged as a potential candidate to revolutionize spectrum utilization. In general, cognitive radio is defined as a software-defined radio that is aware of its surrounding and autonomously adapting its operations to achieve desired objectives in response to unexpected variations, based on the active monitoring of several factors in the external and internal radio envi-ronment, such as radio frequency spectrum, user behavior and network state. The need for CRs is motivated by various factors. Early works focus on the capability of enhancing the flexibility of personal services in a way that supports automated reasoning about the needs of the anticipated user. The radio seeks out the required information and provides the user with instructions or the desired service. Fig. 2.11 illustrates the cognition cycle which consists of Observe, Orient, Plan, Decide, Learn and Act phases, has been widely used to understand and analyze the performance of cognitive processes in cognitive radios and cognitive networks. More recently, the problem of spectrum under-utilization urges the need for intelligent radios to tackle the dynamic allocations efficiently. Although the
1This figure is adapted From Mitola, ”Cognitive Radio: An Integrated Agent Architecture for Soft-ware
Figure 2.1: Simplified Cognition Cycle.
initial aim of CR not directly lies on promoting the utilization of spectrum resource, it does serves as a potential candidate to alleviate this problem since cognitive users could either opportunistically utilize idled spectrum by detecting the spectrum hole or actively negotiate with primary users, i.e the existing licensed users, to access the spectrum. There have been plenty of researches on CR-related topic, which could be classified into three fundamental tasks [3]: 1. Radio-scene analysis, which includes estimation of interfer-ence temperature of the radio environment and detection of spectrum holes. 2. Channel state estimation and predictive modeling, which encompasses estimation of channel-state information and prediction of channel capacity for use by the transmitter. 3. Transmit power control and dynamic spectrum management.
Our work is focus on detecting the activity level of primary users under fading envi-ronments, aiming at avoiding interference to licensed users for promoting the coexistence with underlying primary system, which we adopt an alternative view in sequential sense contrary to conventional block-based detection to tackle with.
2.2
CUSUM-Based Quickest Detection
Change detection is a fundamental problem arising across various branches of science, fi-nance and engineering. By taking the change-point as deterministic but unknown param-eter, we focus ourselves on the minimax formulation of change-point detection under the simplest case and introduce the corresponding efficient detection scheme, Page’s cumula-tive sum (CUSUM) algorithm, with its conceptual derivations and optimal properties for background understanding. Extensive and comprehensive studies could be referred to [1] and [8] for deeper materials.
2.2.1
A Simple Case - Concept and Page’s CUSUM Algorithm
Fundamental Concept
Started by a very important concept in analysis of mathematical statistics, the logarithm of the likelihood ratio, defined by
l(y) = lnpθ1(y)
pθ0(y)
(2.1) and referred to as the log-likelihood ratio, CUSUM algorithm is developed from the key statistical property of this ratio as following:
Given that Eθ0 and Eθ1 denote the expectations of the random observation under the
two distributionspθ0 andpθ1, respectively. Then, it can be easily verified
Eθ0(l) < 0 and Eθ1(l) > 0. (2.2)
Namely, a change in the parameterθ is reflected as a change in the sign of the mean value
of the log-likelihood ratio, which can be regarded as a kind of detectability of change in
distribution [1].
Page’s CUSUM Algorithm
Consider a sequence of independent random variables {yk} with a probability density
pθ(y) depending upon only one scalar parameter. Before the unknown change time t0, the
Figure 2.2:Typical behavior of the log-likelihood ratio Skcorresponding to a change in the mean
of a Gaussian sequence with constant variance : negative drift before and positive drift after the change. (Fig.2.5 of [1])
raise an alarm of the presence of change can be regarded as a stopping timeta, which is
characterized only by the past observations at each time instant. LetSk j =
Pk
i=jli, with
li = ln pθ1(yi)
pθ0(yi), be the log-likelihood ratio for the observations fromyjtoyk. Intuitively, the
typical behavior of the log-likelihood ratioSk
1 shows a negative drift before change, and a
positive drift after change, as shown in Fig. 2.2. Therefore, the relevant information, as far as the change is concerned, lies in the difference between the value of the log-likelihood ratio and its current minimum value; and the corresponding decision rule is then, at each time instant, to compare this difference to some threshold said ~ as follows:
gk = S1k− mk ≥ ~, where mk = min 1≤j≤kS
j
1 (2.3)
which leads to the following equivalent decision function gk = max
1≤j≤kS k
j andta= min{k : gk ≥ ~}. (2.4)
It could be easily verified that the stopping timetais equal to the one determined by Page’s
procedure (also known as CUSUM algorithm) introduced and derived as follows, which has been proved optimal in the sense that it minimizes the worst average conditional delay
¯
τ∗ = sup
t0≥1esssupEθ1(ta− t0+ 1|ta ≥ t0,F
t0−1
1 )2for a fixed mean time between false
alarm ¯T = Eθ0(ta) [8].
In specific, Page suggested the use of repeated testing of the two simple hypotheses: H0 : θ = θ0
H1 : θ = θ1
(2.5)
with the aid of the sequential probability ratio test (SPRT). The SPRT is defined with the aid of the pair(d, T ) where d is the decision rule and T is a stopping time. The definition of the SPRT is thus T = min{k : Sk 1 ≥ ~ or S k 1 ≤ 0} (2.6) andd = 1 if ST 1 ≥ ~; otherwise d = 0.
The key idea of Page was to restart the SPRT algorithm as long as the previously taken decision isd = 0. The first time at which d = 1, we stop observation and do not restart a new cycle of the SPRT. This time is then the alarm time at which the change is detected. The resulting decision rule can be rewritten in a recursive manner as
gk= gk−1+ ln pθ1(yk) pθ0(yk), if gk−1+ ln pθ1(yk) pθ0(yk) > 0 0, if gk−1+ ln pθ1(yk) pθ0(yk) ≤ 0 (2.7) i.e., gk = (gk−1+ sk)+withg0 = 0, (2.8)
and the stopping rule is ta = min{k : gk ≥ ~}, which is equivalent to other forms
presented before.
On the other hand, for deriving the asymptotical optimality of the CUSUM algorithm, it is convenient if we interpret the CUSUM stopping time ta by using a set of parallel
open-ended SPRT, which are activated at each possible change timej = 1, . . . , k, and with upper thresholdh and lower threshold equals to−∞. Each of these SPRT stops at timek if, for some j ≤ k, the observations yj, . . . , yk are significant for accepting the
hypothesis about change.
2
Ft0−1
1 is the filtration, namely the smallest σ-field with respect to observations y1, . . . , yt0−1; the
LetTj be the stopping time for the open-ended SPRT activated at time j:
Tj = min{k ≥ j : Sjk ≥ ~} (2.9)
where we use the convention thatTj =∞ when this minimum is never reached. Lorden
[10] defines the following extended stopping time as the minimum of the{Tj}:
T∗ = min
j=1,2,...{Tj} (2.10)
It also can be showed thatta= T∗.
Optimal Properties
First, deduced from the properties of a set of parallel open-ended SPRT, the relation be-tween the lower bound for the mean time bebe-tween false alarms and the upper bound for the worst average conditional delay for detection under the i.i.d. assumption is stated as follows
Theorem 1 (Thm 5.2.1 in [1]) LetT be a stopping time with respect to{y1, y2, . . .} such that
Pθ0(T <∞) ≤ α
Fork = 1, 2, . . . , let ˜Tk be the stopping time obtained by applying T to{yk, yk+1, . . .} and letTk= ˜Tk+ k− 1.
Define the extended stopping time by
T∗ = min{Tk|k = 1, 2, . . . } Then,T∗ is such that
Eθ0(T ∗) ≥ 1 α ¯ Eθ1(T ∗) ≤ Eθ1(T ) where ¯ Eθ1(T ∗) = sup k≥1 esssupEk(T∗− k + 1|y1, . . . , yk−1)
Applying the above theorem to the case thatTk corresponds to an open-ended SPRT with upperthreshold ~: Tk = min{n ≥ k :Pni=klnpθ1(yi) pθ0(yi)} ∞ if no suchn exists
Then, the extended stopping timeT∗ is Page’s CUSUM stopping timet aand
ta = T∗ = min{Tk|k = 1, 2, . . . }
In this case, it follows from Wald’s identity (see Thm. 4.3.2 of [1]) that when ~ goes to infinity Eθ1(T )∼ ~ K(θ1, θ0) where K(θ1, θ0) = Eθ1[ln pθ1(yi) pθ0(yi) ]
is the Kullback information. Second, from the Wald’s inequality, we have Pθ0(T <∞) ≤ e
−~ = α.
Thus, the worst mean delay is given by ¯ τ∗ = ¯Eθ1(T ∗) ∼ ln ¯T K(θ1, θ0) , as ~→ ∞ where ¯T denotes the mean time between false alarm
¯
T = Eθ0(ta).
The above approximal equation gives the basic relation between the delay for detection and the mean time for false alarm for the CUSUM algorithm in the simplest situation.
Secondly, Lorden proved that the infimum of the worst mean delay among a class of extended stopping times is precisely given by this relation. The main results of Lorden concerning the asymptotically optimal solution of change detection problems are briefly described as below.
Theorem 2 (Thm 5.2.2 in [1]) Let{T (α)|0 < α < 1} be a class of open-ended SPRT such that
and for all realθ1
Eθ1[T (α)]∼
ln(α−1)
K(θ1, θ0)
.
Forγ > 1, let α = γ−1and letT∗(γ) be the associated extended stopping time defined by
T∗(γ) = min{Tk(α)|k = 1, 2, . . . } Then,
Eθ0[T
∗(γ)]
≥ γ
and for all realθ1, T∗(γ) minimizes ¯Eθ1[ ¯T (γ)] among all stopping times ¯T (γ) satisfying
the above constraint. Furthermore, ¯ Eθ1(T ∗(γ)) ∼ K(θln γ 1, θ0) asγ → ∞
This theorem shows the optimality of the CUSUM algorithm from an asymptotic view, what is often called first-order optimality [28]. More precisely, CUSUM algorithm is op-timal, with respect to the worst average conditional delay, when the mean time between false alarms goes to infinity. Based upon the same criterion of worst average conditional delay, another optimality result for CUSUM algorithm is proven in [11] and [12], in a nonasymptotic framework: The CUSUM algorithm minimizes the worst average condi-tional delay for all ¯T ≥ ¯T0, where ¯T0 is small for most cases of practical interest.
Gener-ally, it is difficult to obtain explicit expressions for performance analysis in the finite case. This asymptotic point of view is convenient in practice because a low rate of false alarms is always desirable.
Note that, the CUSUM algorithm is optimal when it is tuned with the true values of the parameters before and after change. When the algorithm is used in situations where the actual parameter values are different from the preassigned values, this optimality is lost.
2.2.2
Extension to Composite Hypothesis Cases
Consider the case where the parameter before changeθ0 is assumed to be known while
θ1is unknown based on the assumption that observations are independent of one another
• Weighted-CUSUM Algorithm:
It is an algorithm comes from the idea of weighting the likelihood ratio with respect
to all possible values of the parameterθ1, using a weighting functiondF (θ1), where
F (θ1) may be interpreted as the cumulative distribution function of a probability
measure. It was derived for change detection in [29], and is a direct extension of the CUSUM stopping time defined as follows. Let
˜ Λk j = Z ∞ −∞ pθ1(yj, . . . , yk) pθ0(yj, . . . , yk) dF (θ1) (2.11)
be the weighted likelihood ratio for the observations from timej up to time k. Then the stopping time is
tW eighteda = min{k : max 1≤j≤kln ˜Λ
k
j ≥ ~}. (2.12)
The most simple choices involve using the uniform distribution over a specified interval that contains all possible values of the parameter θ1, or Dirac masses on
some specified values. Another useful choice is the Gaussian distribution. Note that this type of algorithm cannot be written in a recursive manner as the classi-cal CUSUM algorithm described before. Some asymptotic properties related to weighted-CUSUM algorithm could be found in Section 5.2.3 of [1].
• General Likelihood Ratio Test (GLRT) based CUSUM Algorithm:
In this approach, the unknown parameterθ1 is replaced by its maximum likelihood
estimate as ˆ Λk j = supθ1pθ1(yj, . . . , yk) pθ0(yj, . . . , yk) (2.13) with tGLRT a = min{k : max 1≤j≤kln ˆΛ k j ≥ ~}. (2.14)
The properties of the case that consider hypotheses H0 :{θ = θ0} and H1 : {θ ≥
θ, θ0 < θ} with the aid of an exponential family of distributions (i.e., pθ(y) =
As the weighted-CUSUM algorithm, the GRLT-based approach still has no recur-sive expression thus needs to store all the observations and re-estimate the unknown parameter in all time slots.
2.2.3
Dependent Observations
In this subsection, we consider the situation in which we have dependent observations and briefly introduce the result in generalization of Lorden’s asymptotical optimality on the CUSUM algorithm for dependent models derived by Lai [16].
Suppose that the conditional density function of yk conditioned on t0 = j given
y1, . . . , yk−1isp0,j(·|y1, . . . , yk−1) for k < t0andp1,j(·|y1, . . . , yk−1) for k ≥ t0. Let
¯ Sk j := ln P(j)(y1,· · · , yk|Hj) P(0)(y 1,· · · , yk|H∞) = k X i=j lnp1,j(yi|y1, . . . , yi−1) p0,j(yi|y1, . . . , yi−1) , k≥ j (2.15)
where P(j) and Hj denotes the probability measure and the hypothesis with respect to
change-pointt0 = j and P(0) andH∞are used for the situation when there is no change
occurs. Then, a natural generalization of the CUSUM rule (2.4) is ¯ta= min{k : max
1≤j≤k
¯ Sk
j ≥ ~} (2.16)
Under the condition that the conditional likelihood ratio satisfies lim k→∞supt0≥1esssupP (t0) " max t≤k t0+t X i=t0 lnp1,t0(yi|y1, . . . , yi−1) p0,t0(yi|y1, . . . , yi−1) ≥ kI(1 + δ) | y1, y2, . . . , yt0−1 # = 0 ∀δ >0, (2.17) wheren−1Pt0+n i=t0 ln p1,t0(yi|y1,...,yi−1)
p0,t0(yi|y1,...,yi−1) is assumed to converge in probability under P
(t0)to
some positive constant I, Lai provides the asymptotic lower bound for the worst case average conditional delay subject to mean time between false alarm constraint and proves that the generalized CUSUM rule (2.16) with suitably chosen threshold ~ and certain window-limited modification thereof attain this asymptotic lower bound. However, it has been an open problem concerning whether the asymptotic optimality of the CUSUM rule (2.16) still holds in general as commented in [17].
Chapter 3
CUSUM-Based Quickest Detection for
Cognitive Coexistence
3.1
Problem Setup
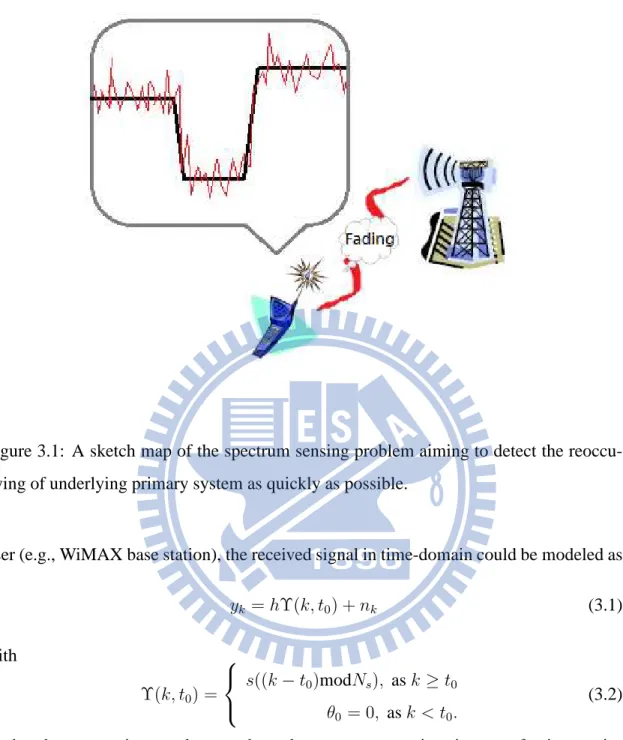
Under a primary communication system (e.g., WiMAX systems, as our explanatory ex-ample throughout the thesis) as shown in Fig. 4.1, we begin with modeling the spectrum sensing problem into a quickest detection with one single cognitive user. To detect the presence of primary user’s signals as quickly as possible, one approach is to exploit fea-tures of the inceptive part of frame structure if prior knowledge about primary system is available. Take the widespread WiMAX system as example in our proposed scheme, we make use of the long preamble, which consists of two WiMAX OFDM symbols and is transmitted at the beginning of the frame. Due to the periodicity of the preamble structure and the aim that we want to detect the presence at first hand, we may only consider the simplified transmitted signal model composed of repeated segments in the leading pream-ble for symbolic convenience. Note that the feasibility of our proposed strategies depends on the prior knowledge of leading signals of primary user, not only applicable to periodic structure.
50 100 150 200 250 300 350 50 100 150 200 250
Figure 3.1: A sketch map of the spectrum sensing problem aiming to detect the reoccu-pying of underlying primary system as quickly as possible.
user (e.g., WiMAX base station), the received signal in time-domain could be modeled as yk = hΥ(k, t0) + nk (3.1) with Υ(k, t0) = s((k− t0)modNs), as k≥ t0 θ0 = 0, as k < t0. (3.2) In the above equation, t0 denotes the unknown presence time instant of primary
sig-nal, Ns denotes the length of the repeated segment of the preamble signal, nk
mod-els the complex white gaussian noise with variance σ2
n at timek, and s(i) is retrieved
from the ith element of s, which collects the periodic fragment of preamble symbol s = [s(0), s(1), . . . , s(Ns− 1)]T. Note that h is the fading effect over the start signals
of the new frame and might be treated either as deterministic but unknown constant or as random variable of a stochastic process, depending on which philosophy we take.
Thus, Our goal is to determine a decision strategy to fairly detect the beginning of the primary signaling prefixed by known preamble structure as quickly as possible, for the sake that the interference caused by the cognitive emitter to the existing primary systems must be avoided.
Contrast to the case of independent observations characterized by only one parame-ter, the detection problem we deal with involves non-homogenous and innately dependent
distributed observations after the reoccupying of the coexisting primary system. In
partic-ular, the difficulties lie on the following aspects. First, the feature of preamble packet sig-naling results in non-homogeneous observations after change, which means the received signals are time-varying distributed even if we ignore the effects of fading channel. In the second place, due to the fact that the signals are transmitted through a fading channel, we have to tackle with the fading effects in the received signals after change. Two ap-proaches are considered in the following two section in non-coherent and coherent sense, respectively.
In non-coherent approaches, as the literal meaning, it is assumed that the receiver only has knowledge of the statistics of channel and no estimation of realization about the unknown channel coefficient is needed. We also discuss and design from coherent sense, which means we resort to channel estimation of the realization of fading coefficient at the receiver end in our proposed strategies.
3.2
Non-Coherent Approaches
In non-coherent approach, we contrive to two CUSUM-based strategies without any esti-mation of realization about the unknown channel fading coefficients in the receiver end. One is called classical CUSUM algorithm, and another is termed to be weighted CUSUM algorithm. In classical CUSUM algorithm, we treat the unknown channel factor as a ran-dom variable with known prior statistics and calculate the likelihood ratio between joint probability density functions of observations under the conditions before and after change occurs, while in weighted CUSUM algorithm we take the unknown channel coefficient as deterministic but unknown constant during the detection process and then weight the
likelihood ratio by applying prior information as weighting function.
After restricting ourselves to purely Rayleigh-fading channels, we may assume that the flat fading channel is modeled as h ∼ CN (0, σ2
h). The more general case under
frequency-selective channel will be further discussed in later subsection.
3.2.1
Classical CUSUM Algorithm
Givenσ2
h at the receiver end, the joint distribution of received signals in specific interval
of observation time before or after change can be fully specified with the channel effect averaged. Whereas, the observation sequence after the change time {yt0, yt0+1, . . .} is
dependent due to the presence of fading channel. Due to the non-homogeneous feature of observations after reoccupying time t0, it seems implicit in the validity of applying
CUSUM algorithm. Thus, we need to study the natural trend of the log-likelihood before and after change.
First, before the change timet0, it can be verified from the Kullback information that
Eθ0[ln pΘ(k,i)(yi, yi+1,· · · , yk) pθ0(yi, yi+1,· · · , yk) ]≤ Eθ0[ln pΘ(k,j)(yj, yj+1,· · · , yk) pθ0(yj, yj+1,· · · , yk) ]≤ 0, ∀i ≤ j ≤ k ≤ t0, (3.3)
where pΘ(k,j) denotes the joint distribution of received signals from time j to k given
t0 = j and pθ0 denotes the joint distribution before change occurs. From the above
inequality, we can observe a negative drift of the expected log-likelihood before change, which indicates the absence of the primary signaling. Similarly, we have
0≤EΘ(k,j)[ln
pΘ(k,j)(yj, yj+1,· · · , yk)
pθ0(yj, yj+1,· · · , yk)
]≤ EΘ(k,i)[lnpΘ(k,i)(yi, yi+1,· · · , yk)
pθ0(yi, yi+1,· · · , yk)
],
∀k ≥ j ≥ i ≥ t0,
(3.4)
which indicates the positive tendency as the change has occurred. Therefore, we might apply the idea of CUSUM algorithm to detect the beginning of the reoccupying signals by the discrimination property. Although the log-likelihood ratio here is not additive due to
the dependency among the observations after change, we still adopt the term “CUSUM” to represent the increasing amount on expected log-likelihood ratio. Then, the decision rule is given by gk = max 1≤j≤kln pΘ(k,j)(yj, yj+1,· · · , yk) pθ0(yj, yj+1,· · · , yk) (3.5) = max 1≤j≤kln 1 πk−j+1det Kk j exp (−y k j H Kkj−1yjk) 1 (σ2 nπ)k−j+1 exp (− 1 σ2 ny k j H yk j) (3.6) and ta= min{k : gk ≥ ~}, (3.7) where Kk
j represents the covariance matrix of received signals from time j to k under
t0 = j, and ykj collects observationsyj, yj+1, . . . , yk.
To be more specific, we can view the received signals from timej to k under t0 = j
alternatively as ykj|t0=j = hxj + nj hxj+1+ nj+1 .. . hxk+ nk (3.8)
wherexi = s((i− t0)modNs). We could recognize that ykj|t0=jis a random vector whose
real part and imaginary part are collectively jointly Gaussian. Further, it is a circular symmetric complex Gaussian random vector with its joint density function denoted as CN (0, Kk j), where Kkj = σ2 h||xj||2+ σ2n σh2xjx∗j+1 · · · σh2xjx∗k σ2 hxj+1x∗j σh2||xj+1||2+ σn2 · · · σh2xj+1x∗k .. . ... . .. ... σ2 hxkx∗j σ2hxkx∗j+1 · · · σh2||xk||2+ σn2 . (3.9)
In conclusion, we treat the unknown channel factor as a random variable with known prior statistics and calculate the likelihood ratio between joint probability density func-tions of observafunc-tions under the condifunc-tions before and after change occurs. At each time instant, we search for the time at which the backward accumulated likelihood ratio is
maximum, in other words, the instant the reoccupying most likely takes place. Then, we raise alarm to declare the change at the first time the resultant accumulated likelihood ratio is larger than a well-chosen threshold. Appropriate threshold ~ can be determined by numerical simulation in advance of detection.
3.2.2
Extension to Frequency-selective Fading Case
Under the concern of frequency-selective fading channel between cognitive user and un-derlying primary user or base station, the received signal in time-domain could be rela-tively modeled as yk = θ(k, t0) + nk, where θ(k) = Υ(k, t0) ⊛ hef f(k), as k ≥ t0 0, as k < t0 (3.10) with Υ(k, t0) = s((k− t0)modNs), as k≥ t0 0, as k < t0. (3.11) and hef f(k) = h(k), as 0≤ k ≤ L − 1 0, Otherwise. (3.12) Similar to previous flat fading case, t0 denotes the unknown presence time instant of
primary signal,Nsdenotes the length of the repeated segment of the preamble signal,nk
models the AWGN with varianceσ2
nat timek, and s(i) is retrieved from the ith element
of the periodic fragment of preamble symbol s= [s(0), s(1), . . . , s(Ns− 1)]T. Note that
the fading effects are caused by the channel h consists ofL uncorrelated taps h(l), l = 0, 1, . . . , L− 1, where each element of h are modeled as purely Rayleigh-fading with varianceσ2
l with uniform power constraintΣLl=0σ2l = 1.
Now, since the natural tendency is still reserved in the case of frequency-selective fading, we could design the corresponding decision strategy from the idea of CUSUM algorithm in a similar way for detecting the beginning of the reoccupying of underlying primary system in multipath environments. Specifically, the decision rule is in the form
of gF S k = max 1≤j≤kln pΘ(k,j)(yj, yj+1,· · · , yk) pθ0(yj, yj+1,· · · , yk) (3.13) = max 1≤j≤kln 1 πk−j+1det Ck j exp (−y k j H Ck j −1 yk j) 1 (σ2 nπ)k−j+1exp (− 1 σ2 ny k j H yk j) (3.14) and tF S a = min{k : g F S k ≥ ~}, (3.15)
where ykj collects observationsyj, yj+1, . . . , yk, and Ckj represents the covariance matrix
of received signals convoluted withL channel taps from time j to k under t0 = j.
In detail, ykj conditioned ont0 = j can be decomposed as
ykj|t0=j = xT jh+ nj xTj+1h+ nj+1 .. . xTkh+ nk = xj,0 xj,1 · · · xj,L−1 xj+1,0 xj+1,1 · · · xj+1,L−1 .. . ... . .. ... xk,0 xk,1 · · · xk,L−1 h(0) h(1) .. . h(L− 1) + nj nj+1 .. . nk (3.16) where theL by 1 vector xicollects the symbols convoluted with h at time instanti. After
such rearrangement, we could assure that yk
j|t0=j is also a random vector whose real part
and imaginary part are collectively jointly Gaussian with its joint density function denoted asCN (0, Ck j), where Ckj = xT jΣ2x∗j + σn2 xTjΣ2x∗j+1 · · · xTjΣ2x∗k xTj+1Σ2x∗j xTj+1Σ2x∗j+1+ σ2 n · · · xTj+1Σ2x∗k .. . ... . .. ... xTkΣ2x∗j xTkΣ2x∗j+1 · · · xTkΣ2x∗k+ σ2 n (3.17)
with Σ2 being the diagonal power delay profile matrix asdiag{σ2
0, σ21, . . . , σ2L−1}. Note
that the elements of covariance Ck
j only depends on the valuek− j and can be calculated
and stored in advance.
3.2.3
Modified Window-limited Version
Although the resultant accumulated likelihood ratio of the proposed classical CUSUM decision strategy could not be calculated in recursive way, we could resort to examine
the required length of backward observations that keeps comparable efficacy with the one without any curtailment of observational window. On the other hand, we also curious about the influence on the case with regard to limited data storage in the receiver equip-ment.
Thus, we can simply replace the decision strategy in previous proposed classical CUSUM algorithm with a modified window-limited version, which is thus given as
gkW L = max max (1,k−W +1)≤j≤kln pΘ(k,j)(yj, yj+1,· · · , yk) pθ0(yj, yj+1,· · · , yk) (3.18) tW L a = min{k : gkW L ≥ ~}, (3.19)
whereW is predetermined window size according to available temporary buffer.
Surprisingly, the effectiveness of classical CUSUM algorithm after truncating the length of needed backward observations is pretty nearly comparable with the original one with full memory of past observations, which lowers the complexity and required storage during implement and is demonstrated by simulation results.
3.2.4
Weighted CUSUM Algorithm
Consider another view about the unknown fading factor, we take the unknown channel coefficient h as deterministic but unknown constant during the detection process in our proposed weighted CUSUM algorithm. The main idea is to weight the likelihood ra-tio with respect to all possible values of the fading coefficient by using a well-chosen weighting function and take the resultant weighted likelihood ratio as an indicator about whether the reoccupying has occurs or not. Once the resultant weighted likelihood ex-ceeds a particular predetermined threshold, which reveal a distinct possibility of primary user’s activity, we stop taking observations and raise an alarm to declare that the change has very likely occurred.
Specifically, the form of the decision strategy of weighted CUSUM algorithm is as following: gkweighted = max 1≤j≤kln Z ∞ −∞ pΥ(j,j)|h(yj)· · · pΥ(k,j)|h(yk) pθ0(yj,· · · , yk) ph(h)dh (3.20)
and
tweighted
a = min{k : g
weighted
k ≥ ~} (3.21)
That is, for every time instantk, we calculate the weighted likelihood ratio from time j = 1, 2, . . . , k to determine the most possible change point and compare the resultant log-likelihood ratio to some determined threshold. Once exceeding, we raise an alarm to declare the reoccupying of underlying primary user.
Provided statistical information about the fading coefficient, it is fairly reasonable to choose the weighting function ph as CN (0, σh2). So, we could calculate the weighted
likelihood ratio as following Z ∞ −∞ pΥ(j,j)|h(yj)· · · pΥ(k,j)|h(yk) pθ0(yj,· · · , yk) ph(h)dh = Z ∞ −∞ exp{ h σ2 n k X n=j ynHΥ(n,j)+ hH σ2 n k X n=j ΥH(n,j)yn− khk 2 σ2 n k X n=j kΥ(n,j)k2}ph(h)dh = Z ∞ −∞ Z ∞ −∞ exp{u( Pk n=jynHΥ(n,j)+Pkn=jΥH(n,j)yn σ2 n )− u2 k X n=j kΥ(n,j)k2 + vi( Pk n=jynHΥ(n,j)−Pkn=jΥH(n,j)yn σ2 n )− v2 k X n=j kΥ(n,j)k2}phR(u)duphI(v)dv = 1 σh√π Z ∞ −∞ exp{u( Pk n=jynHΥ(n,j)+Pkn=jΥH(n,j)yn σ2 n )− u2 k X n=j kΥ(n,j)k2} exp{− u2 σ2 h }du × 1 σh√π Z ∞ −∞ exp{vi( Pk n=jy H nΥ(n,j)−Pkn=jΥH(n,j)yn σ2 n )− v2 k X n=j kΥ(n,j)k2} exp{− v2 σ2 h }dv (3.22) After integrating manipulations, we can get the close form of the weighted log-likelihood ratio ln Z ∞ −∞ pΥ(j,j)|h(yj)· · · pΥ(k,j)|h(yk) pθ0(yj,· · · , yk) ph(h)dh = σ 2 n 2(2σ2 nl + 1) [(fSa k j)2+ ( eSb k j)2]− ln(σh2l + 1) (3.23) with fSa k j = Pk n=jynHΥ(n,j) + ynΥH(n,j), eSb k j = i( Pk n=jyHnΥ(n,j) − ynΥH(n,j)) and l = Pk n=jkΥ(n,j)k2.
Then we could represent the resultant weighted log-likelihood ratio at time instantk as gkweighted = max 1≤j≤k σ2 n 2(2σ2 nl + 1) [(fSa k j)2+ ( eSb k j)2]− ln(σh2l + 1) (3.24)
and the stopping time to raise an alarm is
tweighteda = min{k : g
weighted
k ≥ ~} (3.25)
From the closed-form of weighted log-likelihood ratio (3.23), we can see that the computing complexity of weighted CUSUM algorithm is less than the one of classical CUSUM algorithm, which involves more multiplications during detection process. On the other hand, at low-SNR region, the manipulation of directly weighting over the log-likehood ratio might alleviate the impact of low resolution due to fixed noisy power before and after change.
3.3
Coherent Approaches
In this section, we resort to another route to tackle the fading factor in the received signals after reoccupying. In coherent sense, we take the fading coefficient as unknown but deter-ministic constant or realization of random variable with known prior knowledge needed to be estimated, which turns the observations after change to independent sequence with a common unknown parameterh.
Now, since there exists unknown factor in the distribution of signals after change, we adopt two reasonable ways to refine the statistics we need for on-line detection. One is the GLRT-based CUSUM algorithm in which we estimate the unknown parameter through all available observations then substituting the result into likelihood ratio; another one is to estimate the realization of unknown fading coefficient incorporating with prior knowl-edge, which lead to MMSE-based CUSUM algorithm.
3.3.1
GLRT-Based CUSUM Algorithm
Conceptually, the decision strategy of GLRT-based CUSUM algorithm is given by gGLRT k = max 1≤j≤kln maxhpΘ(k,j)(yj, yj+1,· · · , yk; h) pθ0(yj, yj+1,· · · , yk) (3.26) and tGLRT a = min{k : gkGLRT ≥ ~}, (3.27)
where the unknown parameterh is hence replaced by its maximum likelihood estimate (MLE).
To derive the MLE of unknown parameterh over observations yj, yj+1, . . . , ykunder
t0 = j is equivalent to find the estimator which minimize the least-square (LS) error
Jkj(h) = Σk
n=jkyn− hΥ(n,j)k2 (3.28)
overh.
After decomposing all complex quantities into their real and imaginary parts, we turns the LS error into the following alternatively quadratic form in real variableshRandhI
Jkj′(hR, hI) =Σkn=jkyn,R+ iyn,I− (hR+ ihI)(Υ(n,j),R+ iΥ(n,j),I)k2
=Σk
n=j(yn,R− hRΥ(n,j),R+ hIΥ(n,j),I)2 + (yn,I− hRΥ(n,j),I − hIΥ(n,j),R)2
(3.29) We can rearrange Jk′
j (hR, hI) by setting ykj R = [yj,Ryj+1,R . . . yk,R]T, yj Ik = [yj,Iyj+1,I . . . yk,I],
xR = [Υ(j,j),RΥ(j+1,j),R . . . Υ(k,j),R]T, and xI = [Υ(j,j),IΥ(j+1,j),I . . . Υ(k,j),I]T so that
Jkj′(hR, hI) = (ykj R− hRxR+ hIxI)T(ykj R− hRxR+ hIxI)
+ (yk
j I − hRxI− hIxR)T(ykj I − hRxI− hIxR) (3.30)
or letting x1 = [xR − xI], x2 = [xI − xR] and h = [hRhI]T
Jkj′(hR, hI) =(ykj R− x1h)T(yj Rk − x1h) + (yj Ik − x2h)T(ykj I − x2h) (3.31)
Taking the gradients yields ∂Jk′
j
∂h =−2x
T
then setting this equal to zero and solving produces b hkj =(xT 1x1+ xT2x2)−1(xT1ykj R+ xT2yj Ik ) = xTRyj Rk +xT Iy k j I xT RxR+x T IxI xT Ryj Ik −xTIykj R xT RxR+xTIxI = b hk j R b hk j I (3.33)
which is the minimizing solution. However, if we rewrite bhk
j in complex form as bhkj R + i bhk j I = ˆhkj, we have ˆhk j = xT Ryj Rk + xTIykj I + i(xTRykj I− xTIyj Rk ) xT RxR+ xTIxI =(y k j R+ iykj I)T(xR− ixI) xT RxR+ xTIxI = Pk n=jynΥH(n,j) Pk n=jkΥ(n,j)k2 (3.34)
which is the MLE ofh over observations{yj, yj+1, . . . , yk}.
By substituting the MLE ˆhk
j into the above equation, we arrive at
gGLRT k = max 1≤j≤kln pΘ(k,j)(yj, yj+1,· · · , yk; ˆh k j) pθ0(yj, yj+1,· · · , yk) (3.35)
3.3.2
MMSE-based CUSUM algorithm
Analogous to replacing the unknown parameters by their maximum likelihood estimators in GLRT, we could estimate the realization of unknown fading coefficient incorporating with prior knowledge if applicable, which leads to the use of minimum mean square estimator (MMSE) that minimizes the Bayesian MSE.
Depart from the philosophy employed by GLRT, we assume that the unknown fading coefficient h is a random variable whose particular realization we must estimate. The motivation for doing so is, if we have available some prior knowledge abouth, we can in-corporate it into our estimator. It is somehow difficult to make use of any prior knowledge in classical estimation such as MLE. The mechanism for doing this requires us to assume our unknown factor h as a random variable, which is complex gaussian distributed and represented ash ∼CN (0, σ2
After rearranging observations{yj, yj+1, . . . , yk} conditioned on t0 = j into complex
linear model, we have
yjk= yj yj+1 .. . yk = h Υ(j, j) Υ(j + 1, j) .. . Υ(k, j) + nj nj+1 .. . nk = hxkj + n k j (3.36) where xkj = [Υ(j, j) Υ(j + 1, j) . . . Υ(k, j)]T and nk j ∼CN (0, σn2Ik−j+1).
Since it can be easily verified that ykj andh are jointly complex gaussian, we have the MMSE estimator for the complex Bayesian linear model given by
bhk(M M SE) j =E(h|y k j) =((σh2)−1+ kxk jk2 σ2 n )−1x kH j yjk σ2 n = x kH j yjk σ2 n σ2 h +kx k jk2 (3.37) .
By substituting the MMSE ofh over observations{yj, yj+1, . . . , yk}, we arrive at
gM M SE k = max 1≤j≤kln pΘ(k,j)(yj, yj+1,· · · , yk; ˆh k(M M SE) j ) pθ0(yj, yj+1,· · · , yk) (3.38) and tM M SE a = min{k : g M M SE k ≥ ~}. (3.39)
Chapter 4
Cooperative CUSUM-Based Quickest
Detection in Cognitive Sensors Network
4.1
Problem Setup
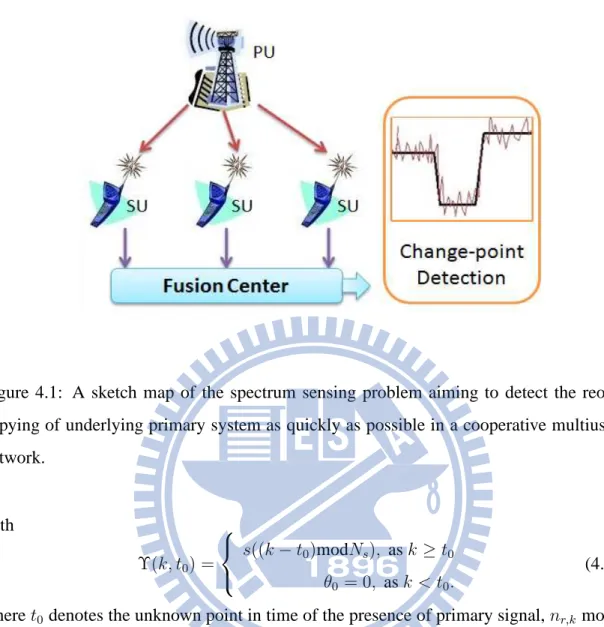
In this chapter, we are interested in developing cooperative CUSUM-based quickest detec-tion algorithms applied to multiuser scenario. As shown in Fig. 4.1, we restrict ourselves to the case in which the information available for local decision-making is in distributed way, not shared among cooperative users. Assume there is a set ofR≥ 1 geographically distributed sensors, denoted asS1, S2, . . . , SR, cooperatively detecting the reactivities of
underlying primary systems. The reoccupying of primary signals occurs at an unknown time instant t0 for all sensors simultaneously. Similar to single-user scenario, we may
only consider the simplified transmitted signal model for symbolic convenience. Again, the applicability of our proposed strategies depends on the prior knowledge of primary signals, not only confined to periodic structure.
Specifically, under the concern of fading effects between collaborative cognitive sen-sors and primary user, the received signal in time-domain at sensorSrcould be modeled
as
Figure 4.1: A sketch map of the spectrum sensing problem aiming to detect the reoc-cupying of underlying primary system as quickly as possible in a cooperative multiuser network. with Υ(k, t0) = s((k− t0)modNs), as k≥ t0 θ0 = 0, as k < t0. (4.2) wheret0 denotes the unknown point in time of the presence of primary signal,nr,k
mod-els the complex white gaussian noise with variance σ2
n at time instant k in the receiver
end ofSr,Nsdenotes the length of the repeated segment of the preamble signal, ands(i)
is retrieved from the ith element of s, which collects the periodic fragment of pream-ble symbol s = [s(0), s(1), . . . , s(Ns− 1)]T. In flat fading case, hr,k is modeled as
purely Rayleigh-fading between primary user and sensorSrwith varianceσr,h2 , remaining
constant during observation time and could be simplified as hr. While in
frequency-selective fading case, we takehr,k as the fading effect at timek caused by the channel
hr= [hr(0), hr(1), . . . , hr(L− 1)]T consists ofL resolvable paths, and each tap of hris
mutually uncorrelated and modeled as purely Rayleigh-fading with varianceσ2 r,l.
dis-tributed sensor network, termed of centralized scenario and decentralized scenario. In the centralized setting, the original data received at sensorsyr,k, r = 1, . . . , R, are sent
completely to a fusion center where a final decision is made based on all sensor massages. In the decentralized framework, quantized version of observations or local decisions are forwarded to the fusion center for making a final decision. The decentralized scenario is usually more practical due to communication bandwidth constraint between sensors and the fusion center.
Next, under considering three different distributed frameworks, we will extend pre-viously proposed CUSUM-based algorithms to multiuser quickest detection and provide decision strategies to collaboratively detect the beginning of primary signals as quickly as possible to avoid possible interference to primary systems.
4.2
Centralized Case: Global CUSUM Algorithm
In centralized sense, we might assume that the pairwise channels between the sensors and the fusion center are error-free. The original data received at each sensor is thus sent com-pletely to the fusion center for global CUSUM test. That is, the fusion center collects all messages received by sensors and performs the CUSUM-based quickest detection based on the whole set of observations.
Under the assumption that the fading effects experienced by each sensor are mutually independent, we could simply extend the result strategies derived in single-user case as following:
◮ Classical CUSUM Algorithm (flat fading case): gk = max 1≤j≤k R X r=1 lnpΘ(k,j)(yr,j, yr,j+1,· · · , yr,k) pθ0(yr,j, yr,j+1,· · · , yr,k) (4.3) = max 1≤j≤k R X r=1 ln 1 πk−j+1det K r k j exp (−yr k j H Krkj −1 yrkj) 1 (σ2 nπ)k−j+1exp (− 1 σ2 nyr k j H yrkj) (4.4) and ta = min{k : gk≥ ~} (4.5)