Abstract—This work proposes an evolutionary algorithm, called the heterogeneous selection evolutionary algorithm (HeSEA), for solving large traveling salesman problems (TSP). The strengths and limitations of numerous well-known genetic operators are first analyzed, along with local search methods for TSPs from their so-lution qualities and mechanisms for preserving and adding edges. Based on this analysis, a new approach, HeSEA is proposed which integrates edge assembly crossover (EAX) and Lin–Kernighan (LK) local search, through family competition and heterogeneous pairing selection. This study demonstrates experimentally that EAX and LK can compensate for each other’s disadvantages. Family competition and heterogeneous pairing selections are used to maintain the diversity of the population, which is especially useful for evolutionary algorithms in solving large TSPs. The proposed method was evaluated on 16 well-known TSPs in which the numbers of cities range from 318 to 13 509. Experimental results indicate that HeSEA performs well and is very competitive with other approaches. The proposed method can determine the optimum path when the number of cities is under 10 000 and the mean solution quality is within 0.0074% above the optimum for each test problem. These findings imply that the proposed method can find tours robustly with a fixed small population and a limited family competition length in reasonable time, when used to solve large TSPs.
Index Terms—Edge assembly crossover, evolutionary algo-rithm, family competition, heterogeneous pairing selection, Lin– Kernighan (LK) heuristic, traveling salesman problem.
I. INTRODUCTION
T
HE traveling salesman problem (TSP) is a well-known NP-hard optimization problem, which requires the deter-mination of the shortest round trip that passes through a set of cities, each exactly once. TSPs raise important issues be-cause various problems in science, engineering, and bioinfor-matics fields such as vehicle routing [1], scheduling problems [2], integrated circuits designs [3], physical mapping problems [4], and constructing phylogenetic trees [5] can be formulated as TSPs.Manuscript received July 8, 2003; revised January 2, 2004. This paper was recommended by Associate Editor H. Takagi.
H.-K. Tsai is with the Department of Computer Science and Information Engineering, National Taiwan University, Taipei 106, Taiwan, R.O.C. (e-mail: [email protected]).
J.-M. Yang is with the Department of Biological Science and Technology and Institute of Bioinformatics, National Chiao Tung University, Hsinchu 30050, Taiwan, R.O.C. (e-mail: [email protected]).
Y.-F. Tsai is with the Department of Social Studies Education, National Taipei Teachers College, Taipei 106, Taiwan, R.O.C. (e-mail: [email protected]).
C.-Y. Kao is with the Department of Computer Science and Information En-gineering, National Taiwan University, Taipei 106, Taiwan, R.O.C., and is also with the Bioinformatics Center, National Taiwan University, Taipei 106, Taiwan, R.O.C. (e-mail: [email protected]).
Digital Object Identifier 10.1109/TSMCB.2004.828283
A large number of methods have been developed for solving TSPs. Evolutionary algorithms (EAs) indicate a very promising direction [6]. They are based on ideas taken from genetics and natural selection. An evolutionary algorithm can be generally applied to solve problems. It is especially appropriate for solving difficult optimization problems, for which traditional optimization methods are less efficient. However, general problem-independent EAs are frequently inefficient in solving TSPs, especially large TSPs.
Many approaches have been presented to improve further EAs for TSPs. Among these, designing TSP-specific operators, incorporating local searches, and maintaining population diversity are considered to be promising ways to solve TSPs. TSP-specified operators, such as, position-based operators which preserve the relative positions of cities in selected parents [7], [8], interval-based operators which inherit subpaths from parents [8]–[11], edge-based operators which preserve edges in selected parents and add new edges heuristically [2], [12]–[15], and geometry-based operators which generate children by considering geometric information [16], [17], can indeed help to solve the performance for solving TSPs. Methods that incorporate domain-specific local search methods into EAs, also called memetic algorithms [18], have also been shown to be efficient heuristics for solving TSPs [19]–[22]. Some mechanisms are specifically designed and constructed to prevent the premature convergence of TSP [22]–[26].
Some factors that improve the quality of solutions to TSPs ob-tained using EAs have been studied. For instance, Reinelt [27] showed that the edge exchange search was much more effec-tive than node reinsertion or node exchange. Whitely et al. [2] claimed the preservation of edges is more important than that of the positions of nodes in the design of recombination operators, and the mechanisms for adding and preserving edges should be emphasized [2], [28]. This work examines four crossover and four local search heuristics based on their qualities of their solu-tions and the mechanisms by which “good edges” (that appear in a known optimal tour) are preserved and added. Edge assembly crossover (EAX) and Lin–Kernighan (LK) were found herein to be the most powerful operators among those surveyed. How-ever, for large TSPs, EAX often requires a large population and LK barely escapes from a locally optimal solution, even though the length of the search is long. In this study, “large TSP” refers to one in which the number of cities exceeds 4 000.
Accordingly, a new evolutionary algorithm, called the heterogeneous selection evolutionary algorithm (HeSEA), is proposed for TSPs. It is obtained by integrating EAX and LK through family competition and heterogeneous pairing selection. The two former genetic operators are the main
TABLE I
MAINMECHANISMS FORPRESERVING ANDADDINGEDGES BYSOMEEDGE-BASEDCROSSOVERS, INCLUDINGEAX, DPX, HX,ANDERX
search operators and the latter two mechanisms are applied used to maintain the diversity of the population. HeSEA was evaluated using 16 well-known traveling salesman problems [29] in which the numbers of cities ranged from 318 to 13 509. Experimental results demonstrate that the quality of solution of the proposed EA is within 0.0074% of the optimal for test problems that involve fixed small populations and limited local search lengths. The family competition and heterogeneous pairing selection in HeSEA can significantly improve the quality of the solution to a large TSP.
The rest of this paper is organized as follows. Section II an-alyzes four crossover and four local search methods of EA, as applied to some TSPs, based on solution quality and the ability to add and preserve edges. Section III describes the proposed evolutionary algorithm. Section IV elucidates some characteris-tics of the proposed approach. Section V presents experimental results and concluding remarks.
II. ANALYSIS OFGENETIC-ANDLOCAL-SEARCHMETHODS
A robust evolutionary algorithm should have powerful and efficient genetic operators. Various crossover and local search methods have been proposed for solving TSPs and some of these operators perform well. However, the reason for the effective-ness, or otherwise, of these operators, is unclear. Radcliffe and Surry [28] classified crossover operators according to the be-haviors of preserved edges. As well as edges inherited from par-ents, foreign edges introduced during the execution of genetic operators, appear to be important. This section analyzes four edge-based crossover operators and four local search methods for solving some TSPs, in terms of the quality of solution and the
mechanisms by which edges are added and preserved. A simple GA is employed to analyze the performances of these surveyed operators. This simple GA uses roulette wheel selection [30] to select the paired chromosomes, and total generation replace-ment with elitism to select individuals of the next generation. The size of the population is set equally to the number of cities and the termination criterion is that the function has been evaluated more than times. In this study, the solution quality is given as an “error” percentage (%), defined as
Error average-optimum
optimum (1)
where average is the average value of the best solutions obtained by the method over 20 trials and optimum is the minimum length of tour so far.
A. Analysis of Crossover Operators
Fig. 1 presents experimental results obtained by applying the simple GA with four edge-based crossovers, EAX [36], HX [13], ERX [2], and DPX [14], on eight small TSP benchmarks—att48,
eil76, eil101, kroa150, kroa200, lin318, pcb442, and att532. The
crossover rate was 1.0 when the performance of the crossover op-erators was analyzed. In these opop-erators, DPX has not been de-signed to preserve edges but to discover new edges not contained in either of the parents. Tours will be improved if local search is applied after DPX. To compare the ability of preserving edges, no local search is applied. As shown, EAX yielded the best and ERX performed the worst of the four crossovers.
Table I briefly summarizes the mechanisms by which the edges of these four edge-based crossovers were preserved and
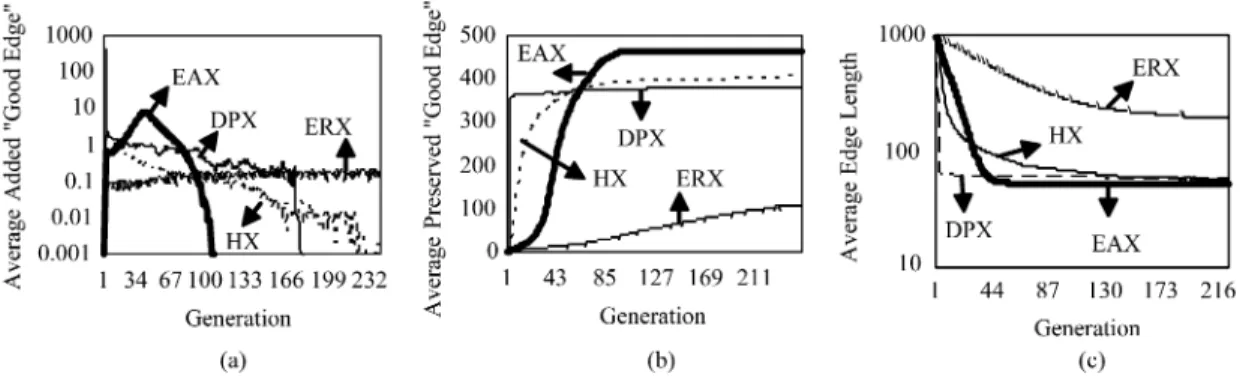
Fig. 2. Comparison of edge-based crossovers, EAX, DPX, HX, and ERX, applied to att532, in terms of the average numbers of (a) “good edges” added and (b) “good edges” preserved, as well as (c) the average edge length.
Fig. 3. Comparison of four local search methods—LK, 2-swap, 2-opt, and NJ—with the simple GA, applied to eight TSP problems in terms of “error” (1). LK is the best method and NJ yields results similar to those obtained by LK. 2-opt and 2-swap perform poorly when the number of cities is high.
added. DPX only preserves the common edges in parents. HX preserves edges by considering short edges in parents and ERX inherits common edges from parents as much as possible. EAX inherits short edges from parents and considers the frequency of edges in the current population. DPX makes the intermediate so-lution valid by adding short edges; ERX and HX randomly add new edges to generate feasible solutions, and EAX preserves edges heuristically and adds new edges with a greedy method, which is analogous to a minimal spanning tree.
Since the main search mechanism of edge-based crossovers is to generate offspring by preserving and adding edges, the char-acteristics of edge-based operators are analyzed by measuring their ability to add and preserve the “good edges” of EAX, DPX, HX, and ERX operators. A “good edge” is defined as an edge in a known optimal tour. Fig. 2 presents the results of applying these four operators to the problem att532. Similar results were obtained in solving the other TSP problems considered herein. Fig. 2(a) reveals that EAX can continuously add more “good edges” than other operators in the early stages (before the 70th generation). After the 70th generation, the average preserved “good edges” [Fig. 2(b)] and the average edge length [Fig. 2(c)] by EAX is better than that obtained using other operators. HX and DPX exhibit similar results for these factors and ERX yields the worst. These results agree with their capacities to add and preserve edges.
In summary, a good crossover operator for solving TSP prob-lems should be edge-based and possess good mechanisms for adding and preserving “good edges.” EAX is regarded as a good crossover operator because it meets these requirements.
B. Analysis of Local Search Methods
Some local search heuristics, such as 2-swap, 2-opt [31], neighbor-join (NJ) [32], and LK [33], have been extensively applied in GAs for solving TSPs. These techniques exchange some edges of parents to generate new children. Usually, stronger local search methods correspond to better performing GAs. The mechanisms by which these methods add and preserve edges vary. 2-swap arbitrarily changes two cities at a time, removing four edges at random and adding four edges at random. 2-opt, NJ and LK exchange edges if the generated solution is better than the original one. In each iteration, 2-opt and NJ exchange two and four edges, respectively; LK exchanges a variable number of edges.
Fig. 3 presents the experimental results obtained by applying the simple GA with the four tested local search methods—LK, NJ, 2-swap and 2-opt—on eight small TSP benchmarks. These benchmarks are att48, eil76, eil101, kroa150, kroa200, lin318,
pcb442, and att532. The crossover rate is 0, according to an
analysis of the performance of these methods. LK and NJ per-formed well. 2-opt became worse as the number of cities in-creased. 2-swap was the worst method.
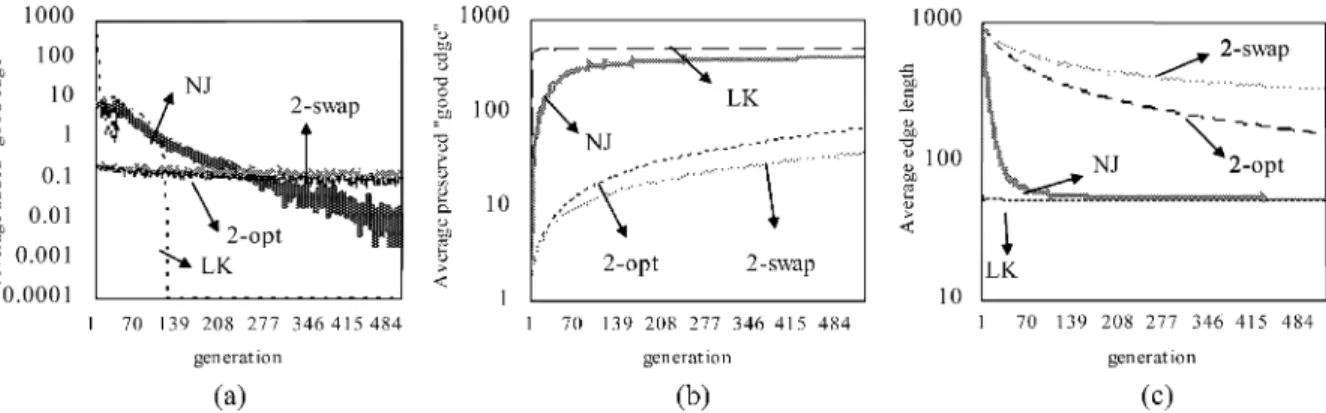
The same strategies of analyzing crossover operators were used to analyze the performance of these methods by measuring their capacities to add and preserve “good edges” of LK, NJ, 2-opt, and the 2-swap method. Fig. 4 presents the results of these four methods, applied to problem att532, in terms of the addition and the preservation of “good edges” and the average edge length. Notably, similar results were obtained for the other seven test problems. Fig. 4(a) reveals that LK and NJ can add
Fig. 4. Comparison of four local search methods, LK, 2-swap, 2-opt, and NJ applied to att532, in terms of the average numbers of (a) “good edges” added and (b) “good edges” preserved as well as (c) the average edge length.
more “good edges” than other operators in the early stages pre-serve more “good edges,” on average, [Fig. 4(b)] in the late stages. LK is the most efficient. 2-opt and 2-swap behave sim-ilarly in adding edges and 2-swap is the worst method in pre-serving “good edges.” These results are consistent with the au-thors’ previous observations. In summary, a good local search method should possess good mechanisms for adding and pre-serving “good edges” for solving TSPs. LK is regarded as a good local search method which meets these requirements.
C. Brief Discussions of EAX and LK
Based on the solution qualities and the abilities to add and preserve “good edges,” EAX and LK are the best methods for adding “good edges” in the early stage and preserving “good edges” in the late stage. However, for large problems ( cities), EAX requires a large population (roughly equal to the number of cities), which is time-consuming. However, LK often finds a local optimal solution quickly but cannot easily improve the solution further, even by lengthening the search. The effi-cient combination of EAX and LK involves both problems of population size and search length.
A summary of the above observations leads to a new evolu-tionary algorithm. The proposed approach integrates EAX and LK with family competition and heterogeneous pairing selec-tion (HpS). These two mechanisms are added to maintain the diversity of the population and increase the probability of gen-erating better children. Sections III and IV will demonstrate ex-perimentally that the proposed system, which successfully in-corporates EAX and LK to compensate for the disadvantages of each other, can find reasonable tours robustly with a fixed small population and a limited family competition length.
III. HETEROGENEOUSSELECTIONEVOLUTIONARYALGORITHM
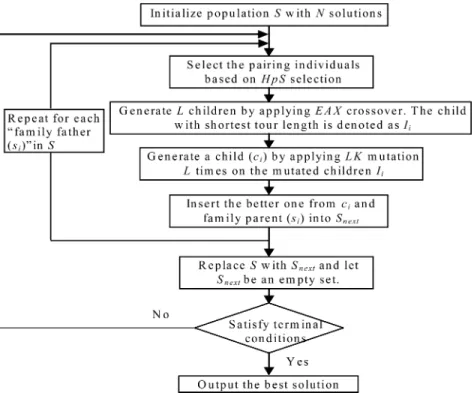
Following Section II, a new evolutionary algorithm, which combines edge assembly crossover (EAX) and LK via family competition and heterogeneous pairing selection (HpS), is in-vestigated. Fig. 5 depicts the main steps of the proposed ap-proach. solutions are randomly generated as the initial pop-ulation. After the fitness of each solution in the population is evaluated, each sequentially becomes the “family father ,” which generates a child by the following steps. The family father employs HpS to select itself and another individual from the population, based on the edge similarity. These two individuals
become the parents used by EAX, generating children. The child with the shortest tour is designated the intermediate off-spring . LK is then executed times (where is the family competition length) to generate a child by mutating the mu-tated child . Of each pair of family father and child , the one with the fitter solution survives. Each individual in the population sequentially follows the above steps to generate its child where . These solutions become the new population of the next generation.
The proposed algorithm is terminated when one of the fol-lowing criteria is satisfied:
1) maximum preset search time is exhausted; 2) all individuals of a population are identical;
3) all of the children generated in five continuous genera-tions are worse than their respective parents.
Sections III-A–D describe HpS, EAX, and LK.
A. Heterogeneous Pairing Selection (HpS)
For each “family father ,” HpS selects and another in-dividual from the current population based on edge similarity to perform crossover operators, such as EAX described herein. HpS is used to prevent trapping at a local optimum, by avoiding incest. In evolutionary processes, incest has two potentially neg-ative effects—the loss of population diversity and the ineffective execution of crossover operations. The formulation and imple-mentation of HpS is described as follows. Let
be the current population; be the set of edges of the so-lution , and be the number of edges of . The number of identical edges of two individuals ( and ) is
defined as .
For each individual , let be the average number of iden-tical edges between and the other individual in the population,
where , and is the population
size. Two extreme correspond to , when no edge of ap-pears in the other individuals and , when all individuals are the same in the population where is the number of cities in a TSP.
For a given individual , HpS selects and another indi-vidual with for the EAX operator. This simi-larity-based mechanism is useful for maintaining the diversity of the population. The experimental results obtained herein are consistent with this claim.
Fig. 5. Overview of the proposed evolutionary algorithm.
In practical implementation, another method is employed to calculate because the time complexity of determining
all by calculating is . At the beginning
of each generation, , the number of instances of edge in the current population, is calculated in advance where . The sum of over in the population, can be reformulated as
(2) Therefore
(3) Therefore, all can be calculated in by looking up the precalculated table. The EAX crossover also uses the informa-tion , so the extra effort associated with calculating is limited.
B. Family Competition
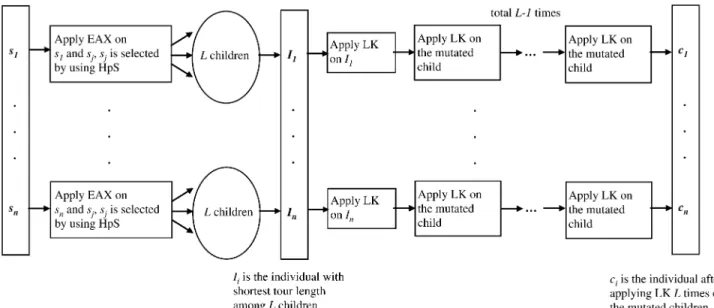
Family competition, derived from -ES, is considered to be a local search procedure in HeSEA. Family competition proceeds as follows (Fig. 6). Each individual sequentially becomes the “family father.” This “family father” and another solution selected by HpS act as parents to perform the EAX crossover operation to generate children. The individual with the shortest tour of these children is chosen to perform the LK operation. LK mutates the mutated child
times. This strategy in which solutions are generated from a single “family father” and a selection is then made, is called a family competition strategy. Each individual sequentially becomes the “family father,” and offspring are generated in each generation.
C. Edge Assembly Crossover
EAX [12] has two important features—preserving parents’ edges using a novel technique and adding new edges by a greedy method, analogous to a minimal spanning tree. Sev-eral issues, including the selection mechanism and heuristic methods, which affect the performance of EAX have been considered [34]–[38]. In this work, the main spirit of the EAX is maintained and HpS is used to replace the random pair selection (RpS), which was the original selection mechanism of the EAX genetic algorithm [12].
EAX is briefly described here. Two individuals, and , are chosen as the parents. EAX first merges and into a single graph, . EAX traverses to generate several -cycles by alternately selecting edges from parents and . According to the heuristic and random selection rules, some -cycles are selected to generate a quasisolution, which contains some dis-jointed subtours. Then, EAX uses a greedy method to merge these disjointed subtours into a valid solution. This solution is returned if its fitness exceeds that of its parents. Else, the proce-dure is repeated until a solution, that is better than both and , is obtained, or children are generated, where is the family competition length.
D. LK
LK, as investigated by Lin and Kernighan [33], is a powerful heuristic for obtaining near-optimal tours in solving TSPs. Var-ious methods have been proposed, either to enhance the search
Fig. 6. Main steps in family competition.
abilities of LK [20], [39], [40] or others use LK as their local search mechanism [14], [16], [24]. The LK algorithm is rather complex. A natural way to illustrate LK is to treat LK as a variable -opt. Given an initial tour, LK tentatively performs a sequence of flips to generate a new tour. The lengths of the initial tour and the generated tour are compared; the shorter tour is selected to perform a new flips-search. The search ends when all possible flips-searches for any city do not yield any improvement.
The concepts of chained local optimization [41], [42] are adapted in HeSEA. Chained local optimization is based on the idea of preserving some of the knowledge obtained in previous executions of LK. In chained-LK, LK is repeatedly efficiently applied to the preceding tour obtained by the most recent ap-plication of LK. HeSEA uses the concorde version of chained LK [43] as a local search method, where the family competition length (the number of kicks in the iterated LK is ).
IV. ANALYSIS OFHESEA
This section considers some characteristics of HeSEA. First, the influences of the population size and the family competi-tion length are discussed. Then HpS is experimentally shown to maintain the diversity of population and generate better chil-dren with a higher probability than random pair selection. More-over, the efficiencies of combining EAX and LK are confirmed by quantifying their abilities to improve and add and preserve “good edges.” The efficiencies of HpS and family competition were evaluated. Finally, HeSEA was compared to the original EAX and LK. The fairness of the analysis was ensured by set-ting the stop criterion to the execution of 1 000 evaluations of the function, where is the number of cities. 16 TSP prob-lems from TSPLIB [29] are selected as the testing problem set, in which the numbers of cities range from 318 to 13 509. Table II lists the names of test problems, the corresponding numbers of cities and the lengths of optimal tours. All of these test problems are complete graphs.
TABLE II
SUMMARY OF17 TESTEDTSPSTAKENFROMTSPLIB [29], INCLUDING
PROBLEMNAMES, NUMBER OFCITIES,AND THELENGTH OFOPTIMALTOUR
A. Effect of the Population Size and Family Competition Length
As stated in Section II, the population size and the family competition length critically determine the com-putation time and quality of the solution. Various values of these two factors were tested on problems att532, fnl4461, and usa13509, to evaluate their effects in HeSEA. Typically, HeSEA yields similar curves for all test problems. Fig. 7(a) represents the relationship between the population size and the average error, defined by (1), obtained in solving problem
fnl4461. For a particular number of evaluations of the
func-tion and the same family competifunc-tion length, the average de-clines as the population size increases. The improvement is insignificant when population size exceeds 100. Accordingly, the population size is set to 100. Fig. 7(b) shows the effect of the family search length on the quality of the solution
Fig. 7. Relationships (a) between the average error (1) and the population size(N) and (b) between the average error and the family competition length (L), for problem fnl4461. Based on the results, the population size(N) and family search length (L) are set to 100 and 20, respectively.
Fig. 8. Comparison of the edge entropy (see the text), the edge similarities within a population (see text), and the ability to generate better children, associated with the proposed system using RpS and those associated with the proposed system using HpS selection, as applied to problem fnl4461. (a) The edge entropy obtained using RpS declines faster than that of HpS. The large edge entropy implies that the population is highly diverse. (b) The average edge similarity obtained using RpS grows faster than that of HPS. (c) The curve associated with RpS declines steeply when the number of generations rises over 180, when applied to
fnl4461, but that of HpS maintains a probability over 80%.
to problem fnl4461. The family search length is set to 20 because improvements in the quality of solution are limited when exceeds 20.
B. Ability of HpS to Maintain the Diversity of the Population
To examine the ability of the HpS to maintain the diver-sity of the population, edge entropy and the average edge similarity of a population were considered to elucidate the search behavior of the proposed approach, with HpS and random pair selection (RpS) mechanisms. RpS, the orig-inal selection mechanism of the EAX genetic algorithm [12], is regarded as an efficient mechanism for maintaining the diversity of the population [35]. The edge entropy of
a population is , where
, is the number of edges, , in the current population and is the population size. The average edge similarity of a population is defined
as , where is the
number of edges shared by a pair of individuals ( and ). A large edge entropy and a low average edge similarity imply a diverse population.
Fig. 8(a) represents the relationships between the edge en-tropy and the number of the generations obtained by the pro-posed method with RpS and HpS selection, applied to problem
fnl4461. Although these two methods yield similar trends, the
edge entropy obtained with HpS declines more slowly than that obtained with RpS. In Fig. 8(a), the edge entropy obtained
with RpS approaches zero as the number of generations ex-ceeds 180 while the edge entropy obtained with HpS always exceeds that with RpS. Fig. 8(b) indicates that the value of the edge similarity obtained using HpS increases more slowly than that obtained by RpS used to solve problem fnl4461. Almost all individuals in a population generated by RpS are the same when the number of the generations exceeds 180 in solving problem fnl4461.
Furthermore, the ability to generate better children is mea-sured to analyze the performance of HpS applied to the EAX crossover. Fig. 8(c) shows the probabilities of generating better children in each generation by applying RpS and HpS to solve problem fnl4461. The probabilities of both methods are near 100% in the early stage. However, the probability obtained using RpS declines steeply, while that obtained using HpS remains at approximately 80% even after all search steps have been exe-cuted. According to these results in Fig. 8, HpS is more powerful than RpS in both maintaining the diversity of the population and in generating better children.
C. Efficiency of Combining EAX and LK
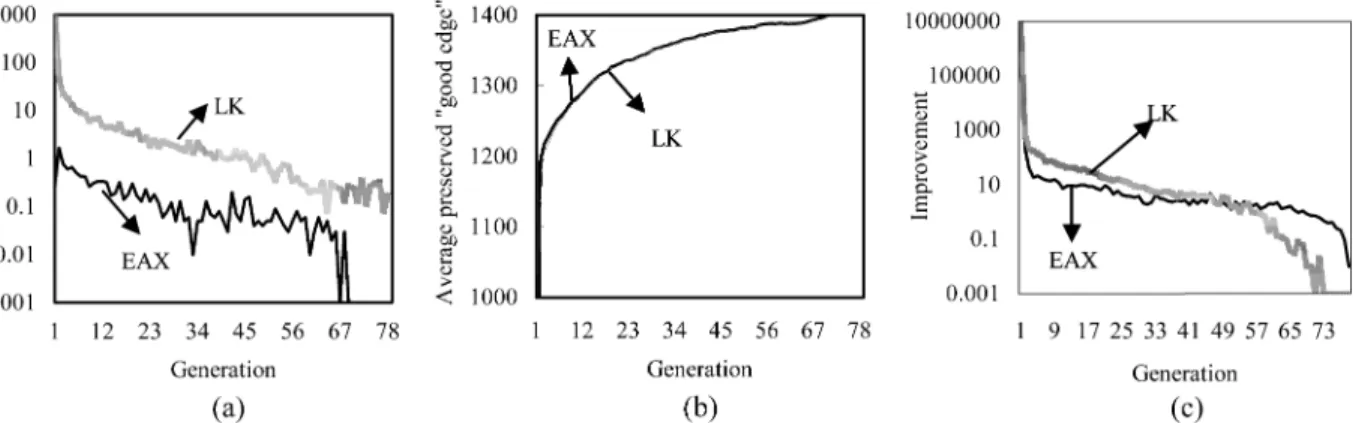
The ability to add and preserve “good edges” (the edges in the optimal tour) and the improvements obtained by the application of EAX and LK operators in HeSEA are measured to evaluate the efficiency of combining EAX and LK. Fig. 9 presents the results of testing the system on problem fnl4461. Fig. 8(a) re-veals that LK can add more “good edges” than EAX. The
abil-Fig. 9. Comparisons of the yielded improvements (defined in the text) and the abilities to add and preserve “good edges” associated with EAX and LK in the proposed method as applied to problem fnl4461. A “good edge” is defined as the edge in the optimal tour. (a) and (b) reveal the average number of added “good edges” and the average number of preserved “good edge,” achieved using EAX and LK, respectively. (c) Presents the average improvement yielded by EAX and LK.
Fig. 10. Comparisons of HeSEA, EAX-GA, and CLK. “Error” is defined in (1). (a) Presents the results of testing these methods on eight TSP benchmarks. (b) Shows the search behaviors of these methods when applied to solving problem fnl4461. These results indicate that HeSEA yields better solutions than the approaches to which it was compared, as it takes advantages of the explorative ability of EAX and the heuristic power of CLK.
ities of these two operators to preserve “good edges” are al-most identical [Fig. 8(b)], implying that they can each maintain the “good edges” generated by each other. These two operators can add “good edges” without reducing the capacity to preserve the “good edges” added by the other one. Although the seam-lessness of combining EAX and LK cannot be proven theoreti-cally, each operator compensates for the other in adding and pre-serving “good edges,” according to the experiments conducted herein.
Fig. 9(a) and (b) shows that LK is more powerful than EAX. The improvements in the tours generated by EAX and LK are of interest. In each generation, the average improvements obtained using EAX and LK are defined as
and , respectively, where is the
population size; is the tour length; represents the th indi-vidual in the population; is the tour generated by applying EAX on , and is obtained by modifying using LK.
Fig. 9(c) shows the improvements yielded by EAX and LK in the proposed approach. These two operators can improve the tour generated by each other. LK yields larger improvements than EAX in the earlier stage, while EAX produces higher im-provements in the later stage. The experimental results indicate that LK can deliver a good solution rapidly and EAX can help LK escape from local optima. This phenomenon is consistent with their behaviors as shown in the following.
The efficiency of the proposed system is examined by com-parison with the original EAX-GA [12] and CLK [43]. The orig-inal EAX-GA applies EAX and RpS selection, while CLK iter-atively adopts LK only. To make the comparison fair, all param-eters are set to the same values as in the papers in which the sys-tems were originally proposed. The population size of EAX-GA is set to the number of cities. In HeSEA, the population size and family competition length are set to 100 and 20, respectively, for all problems.
Fig. 10(a) summarizes the results of HeSEA, EAX-GA and CLK applied to eight benchmarks. These findings indicate that HeSEA performs more robustly than EAX-GA and CLK for test problems. With an equal number of function evaluations , the proposed system yields better solutions than the other two methods when tested on the test benchmarks. The re-sults of EAX-GA are slightly better than those of CLK when ap-plied to smaller problems. For larger problems, such as frl5915 and usa13509, EAX-GA underperformed CLK since EAX-GA requires more search time. The fitness values of the tours gen-erated by these three methods were traced to understand their search behaviors. Fig. 10(b) presents the results of these three methods as tested on problem fnl4461. CLK can find good so-lutions efficiently in the early search stage, whereas, EAX-GA improves tours slowly and may be able to escape from local op-tima to achieve better solutions.
D. Efficiency of Integrating HpS and Family Competition
HeSEA was compared with EAX-LK, which replaces HpS and family competition with a random-pairing scheme and total replacement with elitism, respectively, to confirm the effective-ness of HpS and family competition. HeSEA was also compared to EAX-GA [12] and CLK [43] to evaluate the performance de-livered by combining EAX and LK. Table III shows the experi-mental results concerning the application of these four methods to ten TSP benchmarks. The running times of all comparative methods are all set to the running time of HeSEA (Table IV).
In Table III, EAX-GA outperforms CLK when the problem size is under 4000. For problems frl5915 and usa13509, EAX-GA underperforms CLK because EAX-GA may require more time to converge. EAX-LK, combining EAX and LK with random pairing and total replacement, performed better than both EAX-GA and CLK in all test TSPs. However, when the number of cities exceeds 4000, EAX-LK cannot find the optimal solutions and the average error exceeds HeSEA. HeSEA, integrating EAX and LK through HpS and family competition, not only stabilized the search behaviors but also yielded the solutions of highest quality of all methods, when applied to all tested problems, especially large ones.
In summary, the novel method seems to be able to seam-lessly integrate EAX and LK to solve TSPs, as confirmed by four observations.
1) They can compensate for each other in different search stages [Figs. 8(c) and 9(b)]; that is, LK can accelerate EAX, while EAX helps LK to escape from local optima. 2) They can add “good edges” without reducing the ability to preserve the “good edges” obtained by the other [Fig. 8(a) and (b)].
3) Heterogeneous pairing selection can maintain the diver-sity of the population (Fig. 8).
4) The family competition and HpS in HeSEA can signifi-cantly improve the solutions for large TSPs (Table III).
V. EXPERIMENTALRESULTS ANDCONCLUSION
The proposed approach was tested on 16 TSP benchmark problems in which the numbers of cities ranged from 318 to 13 509. The method was implemented on a Pentium IV 1.2 GHz personal computer with a single processor and 1 GB RAM. Each problem was run 20 times. As in the analysis in Sec-tion IV, the populaSec-tion size and family competiSec-tion length were set to 100 and 20, respectively. Table IV presents the experi-mental results obtained by applying HeSEA to these 16 prob-lems. HeSEA found the optimal tours of all tested problems except problem usa13509. The optimal solution to the small problems (in which the number of cities is less than 4000) is determined in each trial. For large problems, such as fnl4461 and frl5915, HeSEA found the optima at least 16 times out of 20 independent trials. The best solution found by HeSEA to problem usa13509 is 19983361, which is only 0.0025% above the optimum (19 982 859). For each test problem, the average tour length does not exceed 0.0074% above the optima.
HeSEA was compared to six methods, including the ant colony system (ACS) [44], the Voronoi crossover genetic algorithm (VGA) [16], the compact genetic algorithm (CGA) [24], iterated LK (ILK) [20], Tabu search with LK (TLK) [45] and multitrial LK (LKH) [40]. These methods performed well on these test problems, according to a survey of the relevant literature. ACS uses an ant colony system with a 3-opt operator. VGA integrates the Voronoi-quantized crossover with the LK local search. CGA mimics the existence of solutions and combined LK local search. ILK iteratively applies LK local search to a range of initial tours. TLK uses the Tabu search with LK local search, and LKH modifies the original LK by
TABLE V
COMPARISON OF THEPROPOSEDMETHOD(HESEA) WITHSIXMETHODS—THEANTCOLONYSYSTEM(ACS) [44],THEVORONOICROSSOVERGENETIC
ALGORITHM(VGA) [15],THECOMPACTGENETICALGORITHM(CGA) [24], ITERATIVELK (ILK) [20], MULTI-TRIALLK (LKH) [40]ANDTABUSEARCH
WITHLK [45]—ASAPPLIED TO14 TSP PROBLEMS,INTERMS OF THEAVERAGETOURLENGTH ANDCPU TIME. THELENGTH OF THEOPTIMALTOUR OFEACHPROBLEMISGIVEN INPARENTHESES IN THEFIRSTCOLUMN. THEERRORIS ASDEFINED IN(1).
EACHMETHODWASIMPLEMENTED ON ADIFFERENTMACHINE(SEETEXT)
improving its search abilities. The results obtained using these methods were directly taken from original studies or the results of the “8th DIMACS Implementation Challenge: The Traveling Salesman Problem” (http://www.research.att.com/~dsj/chtsp/).
The average error (%) and the average time (in seconds) re-quired to solve the problem are used as measures of the per-formance of the compared methods. The values in parentheses represent the percentage average error as defined in (1). The
av-reveals that the speed of HeSEA is satisfactory and comparable with that of other methods for solving large TSPs, such as prob-lems usa13509 and d15112.
Table V compares the results obtained using HeSEA with those obtained using the surveyed methods. HeSEA yields re-sults comparable with those yielded by other approaches when applied to these test problems. With respect to the quality of the solution, HeSEA can find the optimal solution in each trial in solving problems that involve fewer than 4 000 cities. For the large problems, the average solution obtained by the proposed method is less than 0.014% above the optima value. A compar-ison of HeSEA to the heuristic methods ILK and Tabu, reveals that the proposed method is somewhat slower than the others; however, the quality of the solution to each problem is higher than obtained by the two heuristic approaches. VGA and CGA, two GA-based approaches, yield better solutions than heuristics but slightly worse solutions than the proposed method. Never-theless, LKH is faster than the proposed method. An advantage of HeSEA is that the quality of the solution seems to be more stable than that obtained by LKH, when used to solve these test problems. In summary, HeSEA is a robust method for solving TSPs within a reasonable time.
This work demonstrates that HeSEA is a stable method for solving TSP’s. An evolutionary algorithm for solving TSPs should comprise mechanisms for preserving “good edges” and inserting new edges into offspring, as well as mechanisms for maintaining the population diversity. In the proposed approach, edge assembly crossover and Lin–Kernighan local search pre-serve “good edges” and add new edges. The proposed method can seamlessly integrate EAX and LK to improve the overall search. Heterogeneous edge selection and family competition maintain the diversity of the population and help to generate good children with a high probability.
Experiments on 16 benchmark TSPs confirm that the pro-posed approach is robust and is highly competitive against the algorithms found in a survey of the literature. The proposed method can yield stable solutions to all test TSPs; specifically, it finds the optimum in each run in which the number of cities is under 4 000, and in 16 of 20 independent runs to solve problems
fnl4461 and frl5915. The average solution to problem usa13509
is only 0.0074% above the optimum. We believe that HeSEA is a robust tool for solving large TSPs and has potential applications.
REFERENCES
[1] G. Clarke and J. W. Wright, “Scheduling of vehicles from a central depot to a number of delivery points,” Oper. Res., vol. 12, pp. 568–581, 1964. [2] D. Whitely, T. Starkweather, and F. D’Ann, “Scheduling problems and traveling salesman: The genetic edge recombination operator,” in Proc.
3rd Int. Conf. Genetic Algorithms, 1989, pp. 133–140.
[3] S. Kirkpatrick, C. D. Gelatt Jr, and M. P. Vecchi, “Optimization by sim-ulated annealing,” Science, vol. 220, pp. 498–516, 1983.
crossovers on the TSP,” in Proc. 2nd Int. Conf. Genetic Algorithm Their
Applications, 1987, pp. 224–230.
[8] Handbook Genetic Algorithms, L. Davis, Ed., Van Nostrand, New York, 1991, pp. 332–349.
[9] H. Mühlenbein, M. Gorges-Schleuter, and O. Krämer, “Evolution al-gorithms in combinatorial optimization,” Parallel Comput., vol. 7, pp. 65–85, 1988.
[10] D. E. Goldberg and R. Lingle, Jr, “Alleles, loci and the TSP,” in Proc. 1st
Int. Conf. Genetic Algorithms Their Applications, 1985, pp. 154–159.
[11] L. Davis, “Applying adaptive algorithms to epistatic domains,” in Proc.
Int. Joint Conf. Artificial Intelligence, 1985, pp. 162–164.
[12] Y. Nagata and S. Kobayashi, “Edge assembly crossover: A high-power genetic algorithm for the traveling salesman problem,” in Proc. 7th Int.
Conf. Genetic Algorithms (ICGA), 1997, pp. 450–457.
[13] J. J. Grefenstette, “Incorporating problem specific knowledge into ge-netic algorithms,” Gege-netic Algorithms Simulated Annealing, pp. 42–60, 1987.
[14] B. Freisleben and P. Merz, “New genetic local search operators for the traveling salesman problem,” in Proc. Parallel Problem Solving Nature
IV (PPSN IV), 1996, pp. 890–899.
[15] G. Tao and Z. Michalewicz, “Inver-over operator for the TSP,” in Parallel Problem Solving From Nature V (PPSN V), 1998, pp. 803–812.
[16] D. Seo and B. R. Moon, “Voronoi quantized crossover for traveling salesman problem,” in Proc. Genetic Evolutionary Computation Conf.
(GECCO), 2002, pp. 544–552.
[17] S. Jung and B. R. Moon, “The nature crossover for the 2D euclidean TSP,” in Proc. Genetic Evolutionary Computation Conf. (GECCO), 2000, pp. 1003–1010.
[18] P. A. Moscato, “On Evolution, Search, Optimization, Genetic Al-gorithms and Martial Arts: Toward Memetic AlAl-gorithms,” Caltech, Pasadena, CA, Tech. Rep. California Technical Institute concurrent computation program report 826, 1989.
[19] P. Moscato and M. G. Norman, “A “Memetic” approach for the traveling salesman problem: Implementation of a computational ecology for com-binatorial optimization on message-passing systems,” Parallel Comput.
Transput. Applicat., pp. 187–194, 1992.
[20] D. S. Johnson and L. A. McGeoch, “The traveling salesman problem: A case study in local optimization,” in Local Search in Combinatorial
Optimization, E. H. L. Aarts and J. K. Lenstra, Eds. New York: Wiley, 1997, pp. 215–310.
[21] P. Merz and B. Freisleben, “Genetic local search for the TSP: New re-sults,” in Proc. IEEE Int. Conf. Evolutionary Computation (CEC), 1997, pp. 159–164.
[22] , “Memetic algorithms for the traveling salesman problem,”
Com-plex Syst., vol. 13, no. 4, pp. 297–345, 2001.
[23] S. Ronald, “Preventing diversity loss in a routing genetic algorithm with hash tagging,” Complexity Int., vol. 2, 1995.
[24] R. Baraglia, J. I. Hidalgo, and R. Perego, “A hybrid heuristic for the traveling salesman problem,” IEEE Trans. Evol. Comput., vol. 5, pp. 613–622, Dec. 2001.
[25] L. J. Eshelman and J. D. Schaffer, “Preventing premature convergence in genetic algorithms by preventing incest,” in Proc. 4th Int. Conf. Genetic
Algorithms (ICGA), 1991, pp. 115–122.
[26] K. T. Mak and A. J. Morton, “Distances between traveling salesman tours,” Discrete Appl. Math., vol. 58, pp. 281–291, 1995.
[27] G. Reinelt, The Traveling Salesman: Computational Solutions for TSP
Applications. New York: Springer-Verlag, 1994, vol. 840, Lecture Notes in Computer Sciences.
[28] N. Radcliffe and P. Surry, “Fitness variance of formae and performance prediction,” in Proc. 3rd Workshop Foundations Genetic Algorithms, 1994, pp. 51–72.
[29] G. Reinelt, “TSPLIB-a traveling salesman problem library,” ORSA J.
Comput., vol. 3, no. 4, pp. 376–384, 1991.
[30] J. E. Baker, “Reducing bias and inefficiency in the selection algorithm,” in Proc. 4th Int. Conf. Genetic Algorithms, 1987, pp. 14–21.
for the traveling salesman problem,” in Proc. IEEE Int. Conf. Systems
Man, Cybernetics, 1999, pp. 628–633.
[37] , “An proposal and evaluation of new crossover “Edge assembly crossover” for the traveling salesman problem,” J. Jpn. Soc. Artif. Intell., vol. 14, no. 5, pp. 848–859, 1999.
[38] H. K. Tsai, J. M. Yang, and C. Y. Kao, “A genetic algorithm for traveling salesman problems,” in Proc. Genetic Evolutionary Computation Conf.
(GECCO), 2001, pp. 687–693.
[39] D. Applegate, R. Bixby, V. Chvatal, and W. J. Cook, “Finding Tours in the TSP,” Dept. Computat. Appl. Math,, Rice University, Houston, TX, Tech. Rep. TR99-05, 1999.
[40] K. Helsgaun, “An effective implementation of the Lin-Kernighan traveling salesman heuristic,” Eur. J. Oper. Res., vol. 126, no. 1, pp. 106–130, 2000.
[41] O. Martin, S. W. Otto, and E. W. Felten, “Large step Markov chain for the traveling salesman,” Complex Syst., vol. 5, no. 3, pp. 229–326, 1991. [42] O. Martin and S. W. Otto, “Combining simulated annealing with local
search heuristic,” Ann. Oper. Res., vol. 63, pp. 57–75, 1996.
[43] Concorde Package. [Online]. Available: http://www.math.princeton.edu/ tsp/concorde/co991 215.tgz
[44] T. Stützle and M. Dorigo, “ACO algorithms for the traveling salesman problem,” Evol. Alg. Eng. Comput. Sci., pp. 163–183, 1999.
[45] M. Zachariasen and M. Dam, “Tabu search on the geometric traveling salesman problem,” in Proc. Metaheuristics Int. Conf., 1995, pp. 571–587.
Huai-Kuang Tsai received the B.S., the M.S., and
the Ph.D. degrees in computer science and informa-tion engineering from the Nainforma-tional Taiwan Univer-sity, Taipei, Taiwan, R.O.C. in 1996, 1998, and 2003, respectively.
Since October 2003, he has been postdoctoral Fellow at National Taiwan University. His research interests include evolutionary computation, bioinfor-matics, combinatorial optimization, and data mining.
interests include evolutionary computation, bioinformatics, structural biology, rational drug-design, and machine learning.
Yuan-Fang Tsai received the B.S., the M.S.,
and the Ph.D. degrees from the Department of Hydraulics and Ocean Engineering, National Cheng Kung University, Tainan, in 1992, 1994, and 1999, respectively.
He has been an Assistant Professor in the Department of Social Studies Education, National Taipei Teachers College, Taipei, Taiwan, since 2004. His major interests are in hydraulics engineering, numerical simulation, bioinformatics, and evolu-tionary computation. He has published more than 30 technical papers in various journals and conference records.
Cheng-Yan Kao was born in Taipei, Taiwan, R.O.C.
in 1948. He received the B.S. degree in mathematics from National Taiwan University, Taipei, in 1971, and the M.S. degree in computer science, the M.S. degree in statistics, and the Ph.D. degree in computer science, from the University of Wisconsin, Madison, in 1976, 1978, and 1981, respectively.
He was with the Ford Aerospace and the Unisys Corporation and for General Electric from 1980 to 1989 at the Johnson Space Center, NASA, Houston, TX. He has been a Professor with the Department of Computer Science and Information Engineering, National Taiwan University, since 1990. He has published more than 40 technical papers in various journals and conference records. His research interests include evolutionary computa-tion, bioinformatics, optimizacomputa-tion, and artificial intelligence.
![Fig. 1 presents experimental results obtained by applying the simple GA with four edge-based crossovers, EAX [36], HX [13], ERX [2], and DPX [14], on eight small TSP benchmarks—att48,](https://thumb-ap.123doks.com/thumbv2/9libinfo/7618345.131227/2.918.182.710.347.568/presents-experimental-results-obtained-applying-simple-crossovers-benchmarks.webp)