國 立 交 通 大 學
機械工程學系碩士班
碩 士 論 文
表面聲波馬達摩擦層的力學模型與解析
Modeling and Analysis of Friction Layer in a surface
Acoustic Wave Motor
研 究 生:黃俊傑
指導教授:尹慶中
表面聲波馬達摩擦層的力學模型與解析
Modeling and Analysis of Friction Layer
in a surface Acoustic Wave Motor
研究生:黃 俊 傑 Student:Chun-Chieh Huang
指導教授:尹慶中 博士 Advisor:Dr. Ching-Chung Yin
國立交通大學 機械工程學系碩士班
碩士論文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Mechanical Engineering July 2005
Hsinchu, Taiwan, Republic of China
表面聲波馬達摩擦層的力學模型與解析
研究生:黃俊傑
指導教授:尹慶中 博士
國立交通大學機械工程學系碩士班
摘
要
本文將表面聲波馬達定子與滑座間的接觸問題簡化為兩者間彈性摩 擦層變形的解析模型,摩擦層受到表面聲波的接觸力作用,運動方程式 包含慣性力影響。以複利葉轉換及勢函數,推導接觸力引致的摩擦層表 面變形響應。摩擦層表面位移為一波數積分,以適應性數值積分計算摩 擦層表面的正向與切線變形量。採用 Armstrong 的摩擦理論,考慮滑座摩 擦層與定子間的相對速度對於兩者間摩擦係數的影響,建立摩擦力與正 向接觸力的關係。摩擦層的位移與接觸應力最後是由假設的定子基板位 移條件求得。Modeling and Analysis of Friction layer
in a Surface Acoustic Wave Motor
Student: Chun-Chieh Huang Advisor: Dr. Ching-Chung Yin
Department of Mechanical Engineering National Chiao Tung University
ABSTRACT
This thesis presents an analytical model of elastic friction layer to simplify the contact problem between the stator and slider of the surface acoustic wave motor. The inertia force term is included in the equation of motion for friction layer due to dynamical contact force of surface acoustic waves. The surface response of the friction layer is formulated to be wave number integrals using Fourier transform technique and potential functions. An adaptive numerical integration scheme is used to calculate the normal and tangential deformation on bottom surface of the friction layer. Based on the friction theory proposed by Armstrong, the relative velocity between friction layer of slider and the stator is considered in the relationship between normal force and tangential force acting on the contact surface of both. Finally, deformation and the contact forces acting on the friction layer are evaluated from an assumed displacement of the substrate of stator.
誌
謝
在此篇論文定稿之時,感謝指導教授 尹慶中博士兩年來悉心指導, 使學生論文得以順利完成,在此致上由衷的謝意。同時感謝蕭國模老師、 何旭川老師及陳宗麟老師撥空擔任學生口試委員,給予學生指教與指正。 感謝學長王多聞、游泰和、許世明、劉育翔及溫子逵提供俊傑在生 活上及學習上寶貴經驗,讓俊傑視野更加的廣闊。同學孫繼增、許家豪、 及蔡德新兩年來互相的扶持與幫助,喜怒哀樂一路相隨,這份情誼俊傑 將謹記在心,也祝福你們畢業後順利朝理想邁進。學弟陳俊宏、黃國彰 及張桓真過去一年謝謝你們的陪伴,讓俊傑的研究生活增色不少,也在 此祝福你們論文順利。 最後感謝父母多年來之悉心照顧及奉獻,讓俊傑無後顧之憂得以順 利完成學業。僅以此論文獻給我摯愛的父母及朋友們,再次謝謝你們, 謝謝。目
錄
頁次 中文摘要 i 英文摘要 ii 誌謝 iii 目錄 iv 圖表目錄 vi 第一章 緒論 1 1.1 研究背景與動機 1 1.2 文獻回顧 3 1.2.1 摩擦模型 3 1.2.2 行波式超音波馬達模型 4 1.3 研究方法 8 1.4 內容概述 8 第二章 模型假設與摩擦理論 10 2.1 表面聲波馬達架構與模型假設 10 2.1.1 表面聲波介紹 10 2.1.2 表面聲波馬達驅動方式 11 2.1.3 模型基本假設 12 2.2 摩擦理論 12 2.3 相對速度與接觸條件 14 第三章 彈性摩擦層之動力分析 17 3.1 彈性摩擦層表面之位移頻域響應 173.3 接觸壓力與摩擦層位移場 22 第四章 數值分析結果與討論 24 4.1 核函數特性與波數積分 24 4.1.1 核函數與頻散曲線 24 4.1.2 波數積分 24 4.2 外加負載造成之位移場 27 4.3 接觸壓力數值結果與討論 28 第五章 結論與展望 30 參考文獻 32 附錄 A 35 附錄 B 36 附表 37 附圖 38
圖表目錄
表一 摩擦層( Nylon )材料係數與厚度 37 表二 摩擦係數與相關參數 37 圖 1-1 SAW motor 實驗架構 38 圖 1-2 環型行進波式超音波馬達構造分解圖 38 圖 2-1 雷利波與拉夫波在物體表面傳遞時,表面質點位移情形 39 圖 2-2 當 IDT 通以交流電壓,鈮酸鋰基板之電場方向示意圖 39 圖 2-3 交指叉電極激發表面聲波示意圖 40 圖 2-4 SAW 馬達驅動原理 40 圖 2-5 滑座底部凸塊呈陣列分布 41 圖 2-6 當表面聲波形經過滑座底部時,造成摩擦層產生相似的變形 41 圖 2-7 摩擦層下表面受到接觸應力的作用 42 圖 2-8 摩擦力所造成之遲滯曲線 42 圖 2-9 具有庫倫摩擦、Stribeck 效應以及黏滯效應之摩擦力-速度曲線 43 圖 2-10 定子基板表面質點速度 43 圖 2-11 滑座與基板為點接觸時,滑座與基板間摩擦力方向之示意圖 44 圖 2-12 Wit 等人[8]以鬃毛模型描述表面質點間的相對運動 44 圖 3-1 摩擦層下表面受到集中負載的作用 45 圖 3-2 核函數(a)g11 、(b)g12 及(c)g22 值的灰階圖 46 圖 3-3 物體表面受集中力所產生的位移場示意圖 47 圖 3-4 摩擦層每隔 Δ x 受到一組集中負載作用 47 圖 4-1 尼龍摩擦層的導波頻散曲線 48 圖 4-2 核函數 (a)g11 、(b)g12 及(c)g22 之響應(f=1 MHz, h=1 mm) 49 圖 4-3 波數積分路徑圖 50 圖 4-4 以二階齊次多項式擬合核函數,依精度要求增加新的分割點 50 圖 4-5 集中力(px pz 1 MPa) 作用於x0 mm 之位移頻率響應 、(b)圖 4-6 摩擦層下表面x 0mm 處,受集中力作用所產生的位移場,場點 位置為(a)0.15 ~ 0.15 mm、(b) 2.5 ~ 2.5 mm 52 圖 4-7 摩擦層下表面x 0mm 處,受集中力作用所產生的位移場,摩擦 層厚度為(a)0m、(b)25 m 53 圖 4-8 摩擦層下表面x1,x2 0.005mm 處,受兩組集中力(pz)x1 (pz)x2 1 MPa 作用產生的(a)鉛垂位移、(b)水平位移 54 圖 4-9 摩擦層下表面x1,x2 0.005mm 處,受兩組集中力(px)x1 1MPa ,(px)x2 1MPa 作用產生的(a)鉛垂位移、(b)水平位移 55 圖 4-10 摩擦層下表面x1,x2 0.005mm 處,受兩組集中力(px)x1 1MPa 1 ) (px x2 MPa 作用產生的(a)鉛垂位移、(b)水平位移 56 圖 4-11 摩擦層下表面x1,x2 0.005mm 處,受兩組集中力(pz)x1 1MPa
,(px)x1 0.5MPa,(pz)x2 1MPa,(px)x2 0.5MPa 作用產生的
(a)鉛垂位移、(b)水平位移 57 圖 4-12 摩擦層下表面接觸區x(0.05,0.05)mm 受到均佈負載產生的位 移場,場點x(0.15,0.15)mm 範圍分割成(a)20、(b)100 段之數值 結果 58 圖 4-13 摩擦層下表面接觸區x0(0.05,0.05)mm 受到(a)弦波負載所產生 的(b)位移場,以及受到(c)正向負載所產生的(d)位移場 59 圖 4-14 摩擦層下表面給定(a)水平、(b)鉛垂 位移量對應的(c)切線與(d)正 向分佈力 60 圖 4-15 給定(a)摩擦係數與(b)鉛垂位移量 對應的(c)摩擦力與(d)正向力分 佈 61
第一章 緒 論
1.1 研究背景與動機
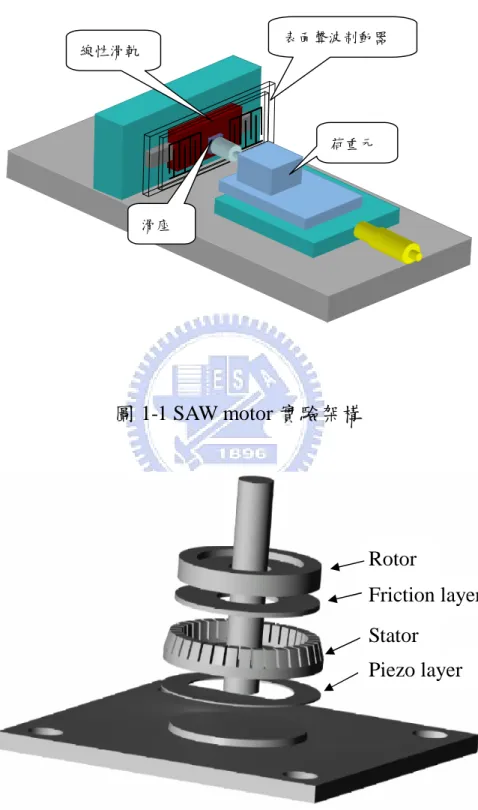
隨著奈米科技的發展,各種元件逐漸朝向微小化的趨勢發展,相對的周 邊機器勢必也要跟著改進,才能符合奈米等級的定位、量測及加工需求。 以精密定位來說,可依據應用行程的長短來分類:進行 DNA 的排序或檢測 便需要短行程高解析度的定位工具;需要長行程高解析度定位之加工或檢 測設備,如掃描探針顯微鏡(Scanning Probe Microscopy, SPM)、原子力顯微 鏡(Atomic Force Microscopes, AFM)等。表面聲波馬達(surface acoustic wave motor,以下簡稱 SAW 馬達)利用滑 塊與表面聲波致動器間的摩擦力做為動力來源,除了高扭矩(推力)、低轉 速、不受磁力影響等優點以外,因表面聲波頻率高、波長短的特性,使 SAW 馬達的平均步進位移下降到奈米等級,除此之外,更具備了一般奈米定位 工具所少有的長行程定位功能,適合應用在掃描探針顯微鏡等高定位精度 需求上。
1994 年,Kurosawa 等人[1]首先在Y127.8cut 之鈮酸鋰(LiNbO3)基板 上,利用兩對互相垂直的交指叉電極,成功製作出表面聲波驅動的 X-Y 線 性馬達,利用不同直徑的圓球作為滑座,操控 IDT 驅動電壓以改變移動速 度,最快可達 20 cm/sec,此為最早的 SAW 馬達雛型。 1999 年,Morita 等人[2]考慮在準靜態的情形下,根據牛頓運動定理與 Hertz 接觸理論建立 SAW 馬達運動模型,利用此模型模擬滑座之暫態響應 及穩態特性,計算出滑座上的接觸壓力,並介紹 SAW 馬達細部的工作原理。 2001 年,Kurosawa 等人[3]引入半導體製程技術,設計製造出具有高功 率輸出性能之 SAW 馬達的矽晶滑座,比較相同面積的矽晶滑座後,發現矽 晶滑座底部的凸塊數越多,配合荷重元(load cell)施加預壓力能有效的產生
較大的推力。
2002 年,Shigematsu 和 Kurosawa [4]根據 Kurosawa [3]所提出的實驗架 構,提出了具有二維自由度的運動模型,將各部份的摩擦力以彈簧與阻尼 表示,化成簡單的機械模型,使用實驗的方式找出所有的系統參數,但對 於摩擦行為的非線性特性沒有太多的描述,鑑別出來的模型無法正確預測 出 SAW 馬達的運動行為。 2003 年,Kurosawa 等人[5]發現矽晶滑座在預壓力的作用下,會使基板 表面發生彈性變形,此變形會影響到接觸壓力的大小採用 Hertz 接觸理論與 有限元素法分析滑座與基板間的接觸壓力,配合實驗找到不同接觸壓力與 馬達輸出效率的關係。
2003 年,Feenstra 和 Al-Bender[6]分析 SAW 馬達作步進位移時的運動行 為,仍然使用 Hertz 接觸定律,考慮有摩擦力影響下的正向力與切向力,利 用凸塊受到剪變形所產生的速度差作為黏滯與滑動的區分條件,模擬出滑 座受到叢發訊號(burst)驅動時的運動行為,結果發現基板上的表面聲波之振 幅須大於一個門檻值(threshold),滑座才會有運動行為發生。 整理現有與 SAW 馬達相關研究可知,自 1994 年 Kurosawa 等人成功完 成了表面聲波馬達的雛形以來,對於 SAW 馬達整體的機構設計與針對馬達 特性定量的量測數據已臻完備。在理論分析方面,僅使用過 Hertz 接觸定律 作為理論分析之依據。採用 Hertz 接觸定律的好處在於對於不同外形與材料 的物體間之接觸問題都已有正向力的解析解,配合庫倫摩擦定律可得到摩 擦力。 對於 SAW 馬達所牽涉到的接觸問題來說,使用單點接觸的假設過於簡 化問題。從摩擦理論來看,Armstrong [7]整理出以往研究摩擦力的實驗結果 得知,摩擦力與兩接觸物體間的相對速度有關,單靠庫倫摩擦定律無法完 整描述摩擦行為,本文將由不同角度探討 SAW 馬達的理論基礎。
1.2 文獻回顧
1.2.1 摩擦模型 在建立 SAW 馬達的運動模型時,計算驅動力(在此即為摩擦力)的大小 是相當重要的課題。從文獻研究中得知,摩擦力估測對於精密定位補償而 言,是左右定位精度的關鍵,現今在控制領域已有許多估測摩擦力的模型, 其中最具代表性的屬下列四篇論文[8-11]: 1995 年,Wit 等人[8]分別將兩物體表面看成兩組不同勁度(stiffness)的鬃 毛,模擬物體間的接觸問題,推導出 LuGre 模型。利用上鬃毛在接觸點與 末端速度的不同,將兩物體的速度差納入考慮,配合 stribeck 效應來描述 摩擦行為,成功將預滑動與滑動兩階段摩擦力以同一組方程式表示,為目 前最常被使用在精密定位控制上的摩擦模型。2000 年,Swevers 等人[9]提出針對 LuGre 模型作修正的 Leuven 模型, 對於物體以低速作來回運動時,因摩擦行為所發生的磁滯現象(hysteresis), 可以使用 Leuven 模型加以預測,並提出磁滯現象具有非局部記憶(non-local memory)的特性,此模型較 LuGre 模型可以更清楚描述出預滑動區的運動行 為。
2002 年,Dupont 等人[10]提出當變形量極小時,接觸面所發生的變形分 成彈性變形(elastic deformation)與塑性變形(plastic deformation),以 LuGre 模型為基礎所衍伸出的摩擦模型,沒有考慮到塑性變形的不可回復性,因 此在有負載的情形下具有漂移(drifting)特性 ,為此提出參數( vz, )予以修 正,稱為彈塑性(elastoplastic)模型。 2003 年,Lampaert 等人[11]將前三種摩擦模型相比較後,發現這些模型 主要是將實驗上發現的已知摩擦現象加到數學式中,提高模型的準確性。 在此三種模型中各取所長,提出了 Maxwell-Slip 模型,沒有多加入新的參
數之前提下,此模型除了對預滑動區(pre-sliding region)的估測,還可以描述 更多的摩擦現象,如摩擦落後(friction lag)、過渡行為(transition behavior)以 及分離力(break-away force)。 由於 LuGre 摩擦模型被廣泛使用在摩擦補償相關研究上,因此本研究先 嘗試以 LuGre 摩擦模型作為 SAW 馬達的基礎推導。在研究的過程中發現, LuGre 摩擦模型主要針對系統來描述整體摩擦力,以一般移動平台為例,平 台上的滑塊與滑軌之間接觸面的幾何形狀相當複雜,若將接觸面逐一討 論,往往吃力不討好。LuGre 摩擦模型針對此種系統估測摩擦力,可以得到 不錯的結果,其特點是此模型中用到 7 個不同的系統參數來描述系統摩擦 力 , 在 使 用 LuGre 模 型 前 須 分 別 對 這 些 參 數 作 系 統 鑑 別 (system identification),只要系統鑑別做好,模型準確度自然高。 所謂系統鑑別就是利用模擬系統或實驗量測的方式,得到系統輸出數據 (如位移、速度等),找出系統轉移函數(transfer function)中的未定係數。但 要從 SAW 馬達實驗中得到滑座之位移和速度等實驗數據非常不容易,此 外,本實驗室先前所完成的 SAW 馬達研究上,除了基板與滑座外,為了方 便量測滑座的位移,固定滑座以施加預壓力,在基板下方了加裝線性滑軌, 如圖 1-1 所示。因此,透過實驗找到的參數,無法單獨分析基板與滑座間的 摩擦力;若改用模擬的方式做系統鑑別,必須將滑座與基板化成等效的質 量-彈簧系統,方便作運動行為的分析。在系統簡化的過程中,必須將非等 向性材料波傳行為納入考慮,摩擦力的非線性行為如何表現在機械系統中 也是一大難題。如此一來,增加了原本問題的困難度。經過評估後發現, 兩種系統鑑別的方法都有相當大的難度,因此改自現有的行波式超音波馬 達模型中尋求解決之道。 1.2.2 行波式超音波馬達模型 超音波馬達(ultrasonic motor)依定子上所激發的波種類的不同,可以分
成 (1) 駐波式(standing-wave type):利用兩個不同的振動模態,使定子表面 質點沿著橢圓形軌跡移動,而轉子與定子接觸區固定在一小段長度 內反覆接觸。 (2) 行波式(traveling-wave type):在有限的長度內,利用兩組不同相位 的交流電壓在定子表面激發表面波,利用表面波的特性來推動定 子,且轉子與定子接觸區隨表面波不斷前進。 不論是哪一種超音波馬達其相關研究都已經相當成熟,其中以行波式超音 波馬達具有較好的控制性,且外型構造在設計上具有較高彈性,近年來新 型態的超音波馬達設計多以行波式為主。 表面聲波馬達屬於行波式超音波馬達的一種,行波式超音波馬達的構造 如圖 1-2,主要分成幾個部分:定子表面呈齒輪狀分布,底部貼有一層壓電 層,施加電壓於壓電層以用來激發行進波,帶動定子做時諧運動。轉子底 部設有一層高分子材料作為摩擦層,摩擦層主要用來增加馬達效率,避免 磨耗損失。 超音波馬達利用定子表面粒子的時諧運動產生推動力,由能量轉換的觀 點來看,其工作原理分成以下兩項: 1. 電能轉成機械能:利用壓電材料作為超音波的激發源,使定子表面 粒子做時諧運動生成行進波。 2. 機械能的傳遞:轉子上施以預壓力,使轉子與定子接觸更為緊實, 透過兩者間摩擦力,使能量經由定子表面粒子傳給轉子,使其運動。 由此可知轉子與定子間依賴摩擦力作能量傳遞,在建立 SAW 馬達的運動模 型時,必須考慮滑座與基板間的接觸問題與摩擦行為。 超音波馬達的性能參數已有完整的計算方法與理論分析根據[12],但在 利用這些公式前必須先分析轉子與定子的接觸問題,現有的超音波馬達相
關研究已經有相當的基礎[13-18]:
1992 年,Hagedorn 和 Wallaschek [13]曾針對行進波式超音波馬達的內 部構造與工作原理作說明,並使用現有的理論作初步探討。在理論分析上 使用 Krirchhoff 板理論,推導出行進波在等向性材料上的位移函數,並以及 Mindlin 圓 板 理 論 對定 子 做 模 態 分 析 ,將數 值 計 算 所 得 到 的 共 振 頻 率
(resonant frequency)與實際馬達的工作頻率(working frequency)互相驗證。
1992 年,Maeno [14]提出了一套分析方法,先利用有限元素法套裝軟體 找出定子的振動模態,接著給定初始位移來分析兩者間的接觸問題,藉此 找出馬達性能參數(例如:力矩-轉速曲線、損失能量與馬達效率),分析慣 性力對馬達效率的影響,發現馬達的共振頻率越高,慣性力的影響越不明 顯。
1995 年,Hagood 和 McFarland [15]將應變與電位的模態形狀函數(mode
shape function)引入系統的運動方程式,將系統參數代入後 ,利用雷利 (Rayleigh-Ritz)模態假設法得到動態模擬的近似解。最後提出一套分析馬達 效率的方法,只需給定超音波馬達的輸入電壓、軸向預壓力、和馬達外加 的扭矩,即可得到馬達的轉速、功率及馬達效率。 1995 年起,Zharii [16-18]從無摩擦力的情況開始分析,推導出超音波馬 達接觸問題的解析解。使用非等向性壓電材料的本構方程式,配合週期性 的電場邊界條件,求出雷利波在壓電基板表面的位移函數,再由位移與應 力的關係找出正向壓力的分布,忽略正向變形與切線變形的耦合效應,從 能量轉換的觀點計算出轉子的速度與兩者間摩擦力大小,雖然 Zharri 考慮 相當詳細,但仍與實際問題有差距,求解析解的數學過程相當複雜,所得 到的解缺少實驗驗證。 1996 年,Schmidt 和 Hagedorn [19]以線性超音波馬達為對象提出一套分 析方法,假設轉子為剛體,將定子視為受到彈性支持的柏努力-尤拉梁
(Bernoulli-Eular Beam),利用梁的運動方程式來分析轉子與定子間的非線性 接觸問題,轉子與定子間的接觸力與摩擦力當成週期性外力,配合傅利葉 級數求解,找出正向壓力分布函數,此法可以找出接觸區的邊界以及接觸 力大小。 1997 年,Moal 和 Minotti [20]以環狀行進波式超音波馬達為例,將原本 三維的問題,簡化為只考慮馬達圓周方向與軸向影響的二維解析法,在處 理轉子與定子間的接觸問題時,加入轉子與定子間摩擦層(friction layer)的考 量,以及定子因受軸向預壓產生之彎曲效應。此法在使用上,只需輸入馬 達運作時的接觸比、作用在馬達轉軸之預壓力、轉子內部產生之行進波振 幅和馬達幾何尺寸,即可得到馬達的所有機械性能。 2001 年,Lu 等人 [21] 將摩擦層視為兼具黏著性與伸縮性的黏彈性 (viscoelastic)材料,將摩擦層的正向變形與剪變形分開作討論。將正向變形 看成彈簧,利用楊氏係數找出正向力。另外提出複數剪力模數(complex shear modulus)來考慮切線方向的剪變形,並將轉子與摩擦層之間相對速度的影響 納入摩擦力的考量,作為區分黏滯區(stick)與滑動區(slip)的依據。結果發現 在不同黏滯區與滑動區的分布情況下,對於能量損失(energy loss)及材料的 磨損(wear)也會有影響。 2003 年,Storck 和 Wallaschek [22]在分析接觸問題時,所做的假設與 Lu 相同,不同之處是利用摩擦層中單一質量元素的運動方程式,找出正向 力及摩擦力,並加入了慣性力的影響,使接觸區中黏滯區與滑動區分隔較 明顯,明確的指出摩擦層切線方向的材料性質會直接影響到黏滯區的分布 及因摩擦所造成馬達效率的損失。 整理超音波馬達過去的文獻可以發現,早期在建立模型時,所使用的方 法以分析定子的振動模態為主,藉此找出馬達的最佳工作頻率。近年來的 研究重點放在轉子與定子間的接觸問題上,在分析時大多假設定子波形保
持不變,轉子變形侷限在摩擦層內,採用庫倫摩擦定律,將摩擦行為區分 成:(1) 黏滯(stick),在接觸點附近兩物體間相對速度為零,摩擦係數為;s (2) 滑動(slip),在接觸點附近兩物體間相對速度不為零,摩擦係數為 。d 整體看來摩擦係數只有兩個定值。此外,這些方法以直接推導馬達數學模 型為主,在推導公式時,各種假設是否成立以及能否能找到解析解等,每 個步驟都相當耗費心力。當公式推導完成後,在設計馬達初期時,可以快 速得到馬達性能分析結果,對於像 SAW 馬達這種發展中的表面聲波馬達相 當適用。
1.3 研究方法
本文針對 Kurosawa 等人[5]所提出 SAW 馬達的架構為對象,在表面聲 波致動器採用Y 128cut 鈮酸鋰作為基板,基板左右各有一組 IDT,滑座 部分則是由微機電製程製作底部具有圓柱凸塊的矽晶滑座。羅世青[23]已完 成 SAW 馬達及相關量測系統的建立,確定此機構可以產生奈米級的位移。 本文以理論推導為主,希望透過理論分析找出增進 SAW 馬達效率的方法。 本文利用適當的假設將 SAW 馬達模型簡化,使用彈性摩擦層的觀念來 分析二維接觸問題,在摩擦層的運動方程式中加入慣性力影響,利用傅利 葉轉換找出摩擦層表面之位移與外力的關係,並使用數值方法分析不同負 載下之位移場。此外,引用 Armstrong [7]提出的摩擦理論,簡化位移與外 力關係,給定基板的表面聲波波形條件,求出摩擦層的位移與接觸應力。1.4 內容簡述
本文共分為五章。第二章第一小節介紹 SAW 馬達工作原理與構造,利 用適當的假設將模型簡化成彈性摩擦層的動態分析;第二小節介紹本文所 使用摩擦理論如何區分摩擦行為,說明摩擦特性如何表現在摩擦係數函數形式上;第三小節利用雷利波表面質點的速度,分析點接觸與面接觸在相 對速度上的不同處。第三章第一小節以數學形式描述所分析的問題,推導 彈性摩擦層表面位移積分之核函數(kernel function);第二小節利用傅利葉逆 變換,找出摩擦層表面之位移頻域響應,數值計算外加負載造成之位移; 第 三 小 節 説明 在給定基板波形下,如何求出摩擦層的位移場。第四章為數 值分析的結果與討論,第一小節由頻散曲線分析核函數的特性,找出適當 的波數積分範圍;第二小節利用波數積分計算摩擦層受到外力作用的位移 場;第三節討論不同摩擦係數函數,在給定基板波形條件下,所求到的位 移與接觸應力。第五章為本文的結論與展望。
第二章 模型假設與摩擦理論
本章主要在描述 SAW 馬達工作原理及架構,針對實際構造作出適當的 假設條件簡化 SAW 馬達,並介紹在點接觸時,滑座與摩擦層間的相對速度。
2.1 表面聲波馬達架構
2.1.1 表面聲波介紹
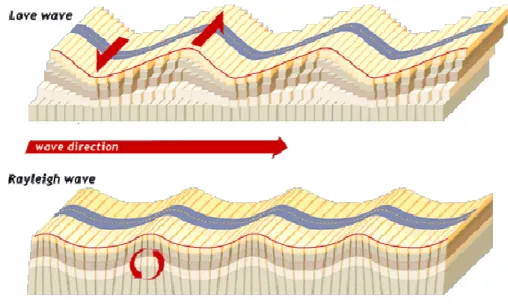
表面聲波(surface acoustic waves)是一種在固體表面上所傳遞的彈性 波,由英國物理學家 Rayleigh [24]在 1885 年的研究中首先發現,表面聲波 分成雷利波(Rayleigh waves)與拉夫波(Love waves),如圖 2-1 所示,前者是 由縱波(longitudinal waves)與橫波(transverse waves)兩種基本波動模態所組 成,後者僅具有面外(out-of-plane)方向的偏振位移。當表面聲波在平板結構 的表面傳遞時,若平板厚度小於 2 倍波長時,所存在的波具有頻散特性, 稱為板波(plate waves),或稱為藍姆波(Lamb waves)。
雷利波的鉛垂位移或水平位移間,存在2的相位差,兩者位於同一個 平面(sagittal plane)上,雷利波的能量百分之九十都集中在表面以下一個波 長的深度,隨著深度增加呈現指數關係的衰減,當雷利波在材料表面傳遞 時,材料表面的質點會循一橢圓形的軌跡作倒退(retrogressive)運動,在深度 距離表面大於 2 倍波長時,所有粒子的位移幾乎等於零;若傳輸介質為非 等向性材料時,雷利波的位移量不只侷限於 sagitttal 平面。 早期,表面聲波的應用並不廣泛,直到 1965 年加州大學柏克萊分校的 White 與 Voltmer [25],將交指叉電極結構製作在壓電晶體的表面,成功的 產生了表面聲波訊號後,才正式開啟了表面聲波元件的應用。表面聲波之 激發方式是在壓電基板(通常為石英、LiNbO3或 LiTaO3等材質)的表面,鍍 上間隔排列、 外型有如柵欄的金屬電極,此架構又稱為交指叉換能器
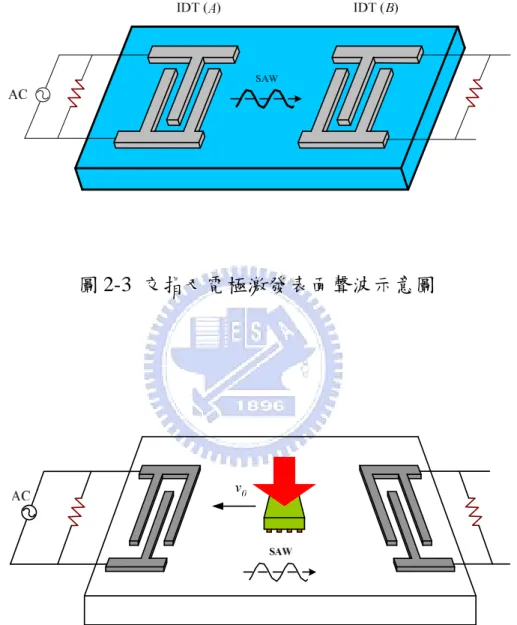
(interdigital transducer, 以下簡稱 IDT),將輸入端接收之電子信號轉換成表 面聲波信號,透過壓電基板傳送至輸出端時,再轉換回電子信號。 在壓電材料中,當波傳能量方向與波前(wave front)垂直時,機電耦合係 數會最大,能量的轉換效率最佳。因此表面聲波致動器的 IDT 配置就必須 配合基板的材料主軸方向做修正,使得致動器的性能最佳,以鈮酸鋰基板 來說,選用的切面角度與[0 1 0]夾角約為128,基板上的表面聲波沿著 x 軸 傳遞時,可以得到最大的表面聲波振幅。 2.1.2 表面聲波馬達驅動方式 SAW 馬達是利用壓電材料之逆效應產生能量的轉換。作法是將 IDT 直 接鍍在鈮酸鋰基板上,如圖 2-2 所示,施以交流電壓於其中一組交指叉電極 (A)上,由於交指叉電極週期性的間隔分佈,壓電基板表面的電場方向成週 期性變化。如圖 2-3 所示,電極下方的壓電材料因逆壓電效應產生週期性連 續的應變,電極(A)每兩根電極的中點可視為一個波動中心,當兩個波動中 心的距離為表面聲波波長的一半或其整數倍(n2)時,將產生建設性干涉造 成能量疊加的效果。相反的,當波長不為n2時,會產生部分破壞性干涉, 能量自然較小。能量以此電極(A)為中心,向壓電材料兩端以表面聲波的形 式傳遞,當波傳能量傳到另一組交指叉電極(B)時,由於壓電材料的正壓電 效應產生電荷,使得電極(B)內每一根電極之間產生電壓差,可以由外接儀 器量得電壓值。 兩組 IDT 間能量藉由波動的形式傳遞,過程中壓電基板表面產生波形變 化。當雷利波在介質表面傳遞時,介質表面質點循一橢圓軌跡運動,當雷 利波往正 x 軸方向傳遞,則質點作逆時針方向旋轉,反之若雷利波朝負 x 軸方向傳遞,則質點作順時針方向旋轉。若將滑座置放在兩組 IDT 中間, 當雷利波由電極(A)往電極(B)傳,滑座會做反方向的移動,此為 SAW 馬達
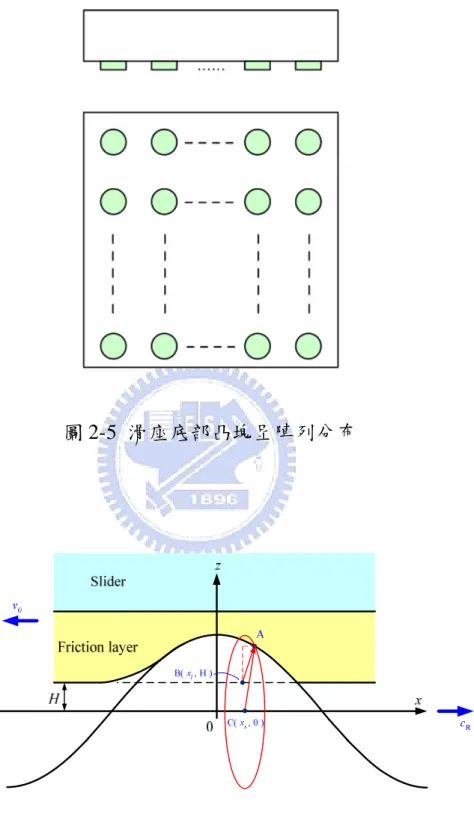
的驅動原理,如圖 2-4 所示。 SAW 馬達利用摩擦力驅動滑座,由於使用的表面聲波振幅僅有數十奈 米,所以基板和滑座間的接觸條件非常重要,SAW 馬達的滑座底部以微機 電製程製成凸塊陣列,如圖 2-5 所示。本研究在作 SAW 馬達模型假設時, 將滑座底部的凸塊視為彈性摩擦層,滑座上半部為剛體。凸塊間彼此等距, 簡化成二維問題時不受影響。 2.1.3 模型基本假設 本文主要探討滑座的穩態行為,利用適當的假設條件簡化 SAW 馬達, 假設馬達在 y 方向無限延伸,變數均獨立於 y,即 y0。將模型簡化成 如圖 2-6 的二維接觸問題,圖中滑座上半部為剛體,底部為可變形之彈性摩 擦層,當表面聲波經過滑座底部時,彈性摩擦層受到表面聲波的推擠產生 與基板波形相似的變形。問題描述如下: (1) 表面聲波的波形及基板表面粒子的運動不因受到接觸壓力的影響而改 變。 (2) 彈性摩擦層與基板均假設為等向性材料,定子表面的雷利波僅在 x 和 z 方向上有位移。 (3) 滑座與基板之間的接觸呈週期性變化,分析範圍以一個波長之長度範圍 內為主。 建立彈性摩擦層與滑座之間接觸面應力與變形的關係,可將基板的波形 以分佈負載取代,如圖 2-7 所示,將分佈負載看成許多集中負載的集合,分 析彈性摩擦層受到集中負載之位移響應,透過位移與負載的關係,分析摩 擦層與滑座間的接觸應力。
2.2 摩擦理論
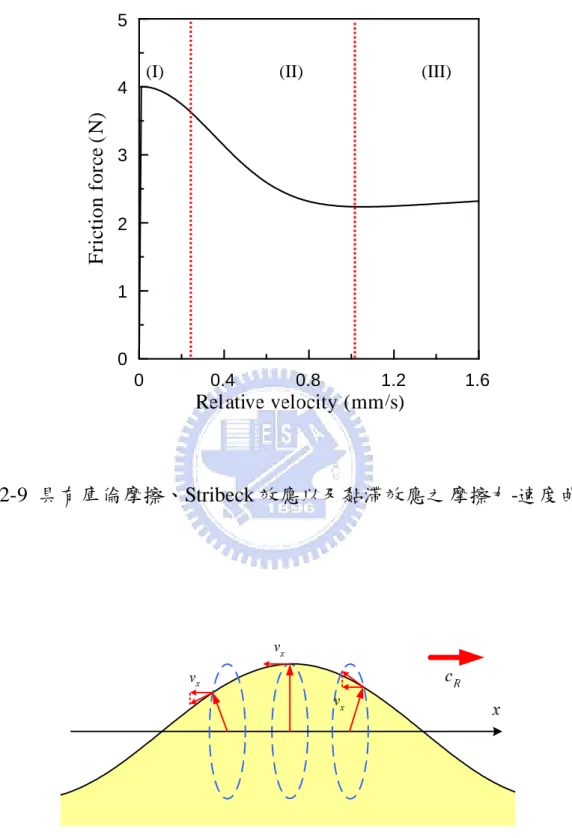
庫倫摩擦定律中指出,摩擦力與正向力成正比,而摩擦係數就是兩者間 的比例關係。隨著兩接觸物體間是否有相對運動的發生,可以有動摩擦係 數與最大靜摩擦係數的分別。利用實驗結果發現摩擦係數並非只有兩個 值,Armstrong [7]整理前人對於摩擦行為所做的實驗結果,發現摩擦行為可 分成 2 個階段:(1) 預滑動(pre-sliding),在此階段裡,兩物體間的相對位移 只有幾個微米以下的大小,以肉眼來看並無法看出兩者間有明顯的移動現 象發生,相對位移發生的原因為材料受力所產生的非線性變形,摩擦力在 此階段物體變形所造成的,故為位移的函數,與庫倫定律最大的差別,在 於滑動之前已有位移產生。(2) 滑動(sliding),當摩擦力克服了最大靜摩擦 力後,兩物體間的相對位移能以肉眼觀察,此時摩擦力為兩者相對速度的 函數。 除此之外,隨著物體間接觸條件不同會產生不同的摩擦特性,例如當線 性馬達的滑座在滑軌上來回運動,就會有 Dahl 效應的影響,使得預滑動區 內的位移-速度曲線會有遲滯現象發生,如圖 2-8 所示。由 Armstrong [7]的 研究中可以歸納出兩項重要的結論: 1. 摩擦係數與兩接觸物體間的相對速度、溫度、材質、接觸面粗糙度有關, 相對速度的方向會影響到摩擦力的方向。 2. 任何摩擦特性均可以表現在摩擦力的函數中,將所代表的數學函數疊加 起來即可。常見的摩擦特性有黏滯(viscous)效應、Dahl 效應、Stribeck 效應 等,個別都有相對應的數學函數形式。 針對上述的第二個結論,舉例來說,若希望同時表現出庫倫摩擦力、 Stribeck 效應與黏滯效應,摩擦力函數可以寫成 ] ) ( )[ sgn( ) (v v f f f e ( ) v Ff c s c v (2.1) 其中,v 為相對速度,fc與 fs分別為最大靜摩擦力與動摩擦力,為黏滯摩 擦係數,的單位與速度相同,為一常數。將(2.1)式畫成摩擦力-相對速度
曲線,如圖 2-9 所示,將曲線分成(I)、(II)與(III)三部分,其中,(I)表示在低 速時的摩擦力與速度呈線性關係,(II)為摩擦力受到 Stribeck 效應的影響急 速下降,(III)為因黏滯效應造成摩擦力在高速狀態下非定值。 在建立摩擦力與速度的關係時,先決定需要將那些摩擦特性放入考慮, 選定摩擦力函數的類型後,接著要決定兩接觸物體間的相對速度,相對速 度的方向與摩擦力方向有關,即 0 for ), ( ) ( f rel f v F v v F (2.2a) 0 for ), ( ) ( f rel f v F v v F (2.2b) 相對速度的決定可以將接觸情形分成點接觸與面接觸來討論,下一小節將 討論此兩種接觸情形對相對速度的影響。
2.3 相對速度與接觸條件
假設雷利波在等向性基板表面傳遞,只考慮 x 和 z 方向的波動,基板之 運動方程式為 2 2 t u z x s xz x , 2 2 t w z x s z xz (2.4) 將位移與應力以勢函數(potential functions)表示成 z x us , x z ws (2.5a, b) z x x z 2 2 2 2 2 ) 2 ( (2.5c) 2 2 22 22 z x z x xz (2.5d) 勢能函數及滿足波動方程式(wave equations),其解可以表示為 z t kx i Ae t z x ( ) 1 ) , , ( (2.6a)z t kx i Be t z x, , ) ( ) 2 ( (2.6b) 其中 0 2 2 2 i k ki 若基板表面不受曳力(traction)作用,邊界條件得到可以表示為 0 z xz , at z 0 整理可得齊性方程組, 0 0 2 2 2 2 2 2 2 1 2 2 2 2 B A k k ik ik k k (2.7) 若存在非零解,其充分條件為det[]0,待定係數比為 2 2 2 2 2 2 ik k k A B (2.8) 將(2.6a, b)式、(2.7)式及(2.8)式分別代入(2.5a, b)中,可得到: ) ( 2 2 2 ) , 0 , ( i kx t s Ae k ik t x u (2.9a) ) ( 2 1 2 2 2 1 2 2 1 ) , 0 , ( i kx t s Ae k k t x w (2.9b) 將(2.9)式化簡後,取實部得到基板表面位移的頻域響應為 ) sin( ) , 0 , (x t A t kx us (2.10a) ) cos( ) , 0 , (x t A t kx ws (2.10b) 其中, k k A 2 2 2 , 2 2 2 1 ) ( 2 ) ( 1 2 c c c c R R 。 此處c 為雷利波相速度。質點速度可由R (2.10a, b)式對時間微分得到 ) cos( ) , 0 , (x t A t kx us (2.11a) ) sin( ) , 0 , (x t A t kx ws (2.11b) (2.11a, b)式為表面質點在頻域上的速度函數。在某一個特定時間 t 時,基板
表面各點的速度與位移表示成圖 2-10,由圖中可知,表面質點速度在越接 近波峰的地方越小,越靠近接觸區邊緣的地方越大。 若滑座與基板為點接觸,滑座整體可以看成只有一個移動速度 v0,兩者 間的相對速度為 0 ) , 0 , ( ) (x u x t v vrel s (2.12) 其中,v0介於us( b)與us(c)之間。倘若在x 處,滑座與質點的速度相同,b 隨著表面質點速度u的變化,利用相對速度將接觸區分成三區s (I) 滑動: x[b,b), vrel(x)0 (II) 預滑動: x(b,b), vrel(x)0 (III)滑動: x(b,c], vrel(x)0 由(2.2)式得到摩擦力的方向,如圖 2-11 所示。由圖中可知,當雷利波 沿著正 x 軸傳遞時,反作用力所產生的合力使滑座向負 x 軸移動;反之,雷 利波往負 x 軸傳遞時,滑座向正 x 軸移動,圖 2-12 顯示若滑座與基板間為 點接觸時,摩擦力的合力可以用來推動滑座。 當兩者間為面接觸時,如圖 2-6 所示,因摩擦層本身會變形,由相對運 動公式,摩擦層表面質點的速度應為滑座速度與質點對滑座的速度相加而 成,令表面質點速度為vl( x),由(2.10)式得到基板與摩擦層間相對速度 ) ( ) , 0 , ( ) (x u x t v x vrel s l (2.13) 由於摩擦層受力後的變形無法得知,質點速度vl(x)也就無法掌握,Wit 等人[8]曾經嘗試利用鬃毛模型試圖找出兩者的關係,如圖 2-12 所示。下一 章將分析彈性摩擦層受到外力作用所產生的位移響應,找出摩擦層位移與 基板變形間的關係。
第三章 彈性摩擦層之動力分析
從2.1.3節所建立的模型假設,將SAW馬達的二維接觸問題簡化為摩擦 層受力之位移響應分析,如圖2-7所示,透過探討彈性摩擦層受到分布負載 作用產生的位移響應,分析滑座與基板間的接觸壓力。3.1 彈性摩擦層分析
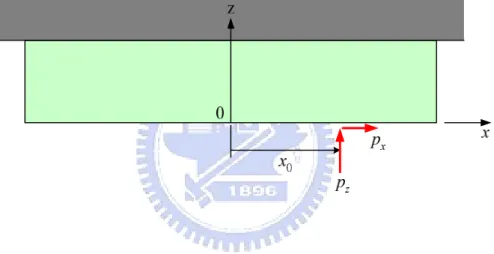
考慮摩擦層下表面距離z軸x0處受到一組集中負載作用,此集中負載包含 了正向力與摩擦力兩部分,如圖3-1所示,假設摩擦層頂部固定在轉子上。 若忽略徹體力(body force),將摩擦層的運動方程式表示成 2 2 t u z x l xz x , 2 2 t w z x l z xz (3.1) 位移與應力分量可用勢函數(x,z,t)和(x,z,t)表示如下: z x ul , x z wl (3.2a, b) z x x x 2 2 2 2 2 (3.2c) z x z z 2 2 2 2 2 (3.2d) 2 2 22 22 z x z x xz (3.2e) 其中 ) 2 1 )( 1 ( E , ) 1 ( 2 E 。 將(3.2c-e)式代回運動方程式(3.1),化簡得到2 2 2 1 2 1 t c , 2 2 2 2 2 1 t c (3.3a, b) 其中,c1 (2) ,c2 。假設勢函數具有時諧因子(time harmonic
factor)eit,利用分離變數法(separation of variables),勢函數可以寫成
t i e z x t z x ( , , ) ( , ) , (x, z,t) (x, z)eit (3.4a, b) 由於本研究僅討論SAW 馬達的穩態行為,以下推導將省略時諧因子eit。
將(3.4)式對x作空間傅利葉變換(spatial Fourier transform),可得
ˆ(k,z) (x,z)e ikxdx,
ˆ(k,z) (x,z)e ikxdx (3.5a, b) 對應的逆變換為
x z ˆ(k,z)eikxdk 2 1 ) , ( ,
x z ˆ(k,z)eikxdk 2 1 ) , ( (3.5c, d) 將(3.5c, d)式代入(3.3a, b)式中,整理後得到 0 ˆ ˆ 2 1 2 2 z , 0 ˆ ˆ 2 2 2 2 z (3.6a, b) 其中, k k k k i k k k k j j j j j , , 2 2 2 2 。 此處,k為摩擦層導波在x方向之波數,且kj cj。由於摩擦層的厚度不 大,令(3.6)式的通解為 ) sin( ) cos( ) , , ( ˆ 1 2 1 1 z A z A z k (3.7a) ) sin( ) cos( ) , , ( ˆ 2 2 2 1 z B z B z k (3.7b) 取 2 2 k kj j ,將勢函數(3.7a, b)式代入(3.2a, b, d, e)式,整理成矩陣形式
2 1 2 1 ˆ ˆ ˆ ˆ B B A A w u z xz l l M (3.8) 其中 ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) cos( ) sin( ) sin( ) cos( ) cos( ) sin( ) cos( ) sin( ) sin( ) cos( 2 2 2 2 1 1 2 2 1 1 1 1 2 2 1 1 1 1 2 2 2 2 1 1 z m z m z n z n z n z n z m z m z ik z ik z z z z z ik z ik M 此處,m2i k , 2 2 2 2 k k n 。考慮在z軸右邊x0處,有一組集中負載作 用於摩擦層下表面,此集中負載包含了px 與pz 兩個分量,則下表面的應力 邊界條件為 (i) z = 0: xz px(x x0), z pz(xx0) (3.9a) 令在摩擦層與轉子連接處的位移邊界條件為 (ii) z = h: ul 0, wl 0 (3.9b) 將(3.9)式分別對x作複利葉變換,可以得到 (i) z = 0: ˆ ikx0 x xz p e , ˆ ikx0 z z p e (3.10a) (ii) z = h: uˆ0, wˆ0 (3.10b) 將邊界條件(3.10)式代回(3.8)式,可得一組聯立方程式 0 0 0 1 2 0 0 2 0 2 2 0 ) sin( ) cos( ) cos( ) sin( ) cos( ) sin( ) sin( ) cos( 2 1 2 1 2 2 2 2 2 2 2 1 2 2 1 1 1 1 2 2 2 2 1 1 ikx z x e p p B B A A k i k k k k k i h ik h ik h h h h h ik h ik 移項後得到 B N C 1 (3.11) 其中,
2 1 2 1 B B A A C , 0 0 0 1 ikx z x e p p B 2 2 2 2 2 2 2 1 2 2 1 1 1 1 2 2 2 2 1 1 2 0 0 2 0 2 2 0 ) sin( ) cos( ) cos( ) sin( ) cos( ) sin( ) sin( ) cos( k i k k k k k i h ik h ik h h h h h ik h ik N 將求到的係數C ,代回(3.8)式得到摩擦層下表面之位移響應為 z x l l p p g g g g w u 22 21 12 11 1 ˆ ˆ (3.12) 其中, 2 1 2 2 2 2 2 1 2 1 2 4 2 2 2 2 2 1 2 2 4 2 2 2 1 2 2 2 4 2 ) 4 8 ( ) cos( ) cos( ] ) 4 8 [( ) sin( ) sin( ] 4 4 4 [ k k h h k k h h k k k )] sin( ) cos( ) cos( ) sin( [ 2 1 2 1 2 1 2 2 2 11 k h h h h g )]} cos( ) cos( 1 [ ) 4 ( ) sin( ) sin( ) 2 2 {( 2 1 2 1 2 2 2 1 2 2 2 1 2 2 4 12 h h k h h k k ik g 12 21 g g )] cos( ) sin( ) sin( ) cos( [ 1 2 1 2 1 2 2 1 2 22 k h h h h g 此處,det(N)0為頻散方程式。將位移響應(3.12)對 k 作空間傅利葉逆 變換,得到在摩擦層下表面(z = 0)之位移頻域響應
z x x x ik l l p p dk e k w u ( ) 0 ) , 0 , ( g (3.13) 其中, 22 21 12 11 1 ) , 0 , ( g g g g k g此處,g(k,0,)為摩擦層下表面位移頻率響應之核函數(kernel function)。 假設摩擦層厚度為1 mm,以下數值計算採用之摩擦層材料常數如表一 所列。將核函數中各項係數g11 、g12 及g22 的值以灰階圖畫出,如圖 3-2所示,由圖中可看出,g11 與g22 對於k=0呈對稱,g12 對於k=0呈 反對稱,了解核函數的特性,有助於簡化波數積分時的運算。
3.2 外加負載造成之位移場
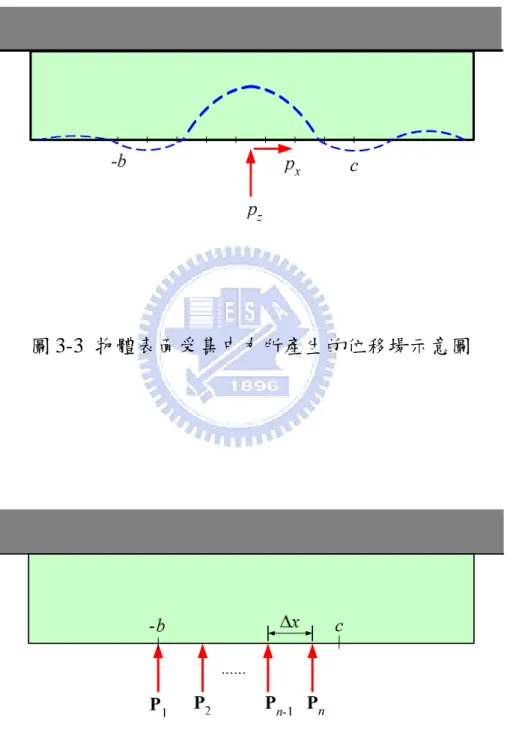
假設摩擦層為連續體,當外力作用在物體表面時,所產生的位移會以作 用點為中心向兩旁擴散,使物體表面有區域變形發生。圖3-3為物體表面受 到集中力作用產生的位移場示意圖,上一節已推導出位移之頻域響應(3.13) 式與外力有關,利用(3.13)式可以找到摩擦層表面受力後的位移場。 已知接觸區範圍x(b,c),如圖2-7所示,將接觸區分割成n塊,假設距 離z軸x0處受到集中負載作用,由(3.13)式得到集中負載造成摩擦層下表面位 移場為 z x i n p p x x,0; ) ( 0 1 2 1 G u u u (3.14) 其中, i l i l i w u u ,
k e dk x x ik x x i i ) ( 0 1( ,0; ) g( ,0, ) 0 G 此處,u 為摩擦層表面位置在i x 的位移,xi x 為負載作用點位置。x0 當不只一個負載作用在表面時,整體的位移場相當於個別負載造成位移 場之總和。若每隔一段距離就受到一組集中負載作用,如圖3-4所示,把每 一組集中負載造成的位移場累加起來,整理得到摩擦層受到分布負載所發 生的位移場為 n ij n nn n n n p p p K p p p G G G G G G G u u u 2 1 1 2 1 1 22 21 1 12 11 2 1 (3.15) 其中 j z j x j p p p ,
dk e k x x ik xi xj j ij ij ) ( 1 ) , 0 , ( ) ; 0 , ( g G K 。 此處,p 表示在摩擦層表面位置在j x 的負載,xj x 表示負載的作用點位j 置。3.3 接觸壓力與摩擦層位移場
在2.2節中將二維接觸問題中基板的波形拿掉,以外力取代,使問題便 於分析,在之後的推導過程中,最後得到整體位移與外力的關係,如(3.15) 所示,若可以得到摩擦層表面的位移自然可以找到接觸壓力。為此,將(3.15) 式中與z方向位移w有關的項提出來,整理出另一組聯立方程式 1 2 2 1 2 1 22 21 1 12 11 1 2 1 n n n n n n n n w w w p p p Q Q Q Q Q Q Q (3.16) 其中
k e dk x x ik xi xj j ij ) ( ) , 0 , ( ) ; 0 , ( q Q 此處, ] [ 1 22 21 g g q 由於摩擦係數函數(2.3)式為相對速度的函數,故將集中負載表示成j z j p v 1 ) ( p (3.17) 將(3.17)代回(3.16)式,化簡後得到 j z ij n z z z nn n n n p Q p p p Q Q Q Q Q Q Q w w w 2 1 1 22 12 1 12 11 2 1 (3.18) 其中
q k e dk x x Q ik xi xj j ij ) ( ) , 0 , ( ) ; 0 , ( 此處, ( ) 21 22 ) , 0 , (k v g g q 若給定摩擦層在位置x 的縱向位移xi w 為i H kx A H x w wi s( i) cos( i) (3.19) 其中,H 為摩擦層與定子的間距。代入(3.18)式得到正向壓力 w Q pz 1 (3.20) 將上式經由(3.17)式計算出px,再代回(3.15)式可以得到橫向位移u。 要計算(3.14)、(3.15)及(3.20)式的數值結果,必須對核函數g(k,0,)作波 數積分,波數積分具有強烈震盪的指數因子,核函數也具有極點,通常沒 有封閉解,本文採用數值方法計算將於下一章中數值積分方法及數值結果。第四章 數值分析結果與討論
4.1 核函數特性與波數積分
4.1.1頻散曲線 波數積分的困難在於波數之指數函數為高度振盪(oscillating)的函數,且 當計算的核函數落在極點(poles)附近,位移響應顯出奇異性(singularity),因 此數值積分之精確度及效率的要求極為重要。從導波的頻散曲線可以知道 極點的分布位置,有助於判斷波數積分的適當範圍。所謂頻散效應指導波 的波速會隨著波長、操作頻率而變化,頻散方程式k( ,)0的根所對應之 波數為核函數之極點,將極點畫在以頻率作為橫軸,波數為縱軸的座標圖 上,即為頻散曲線(如圖4-1)。假設工作頻率為1 MHz,摩擦層厚度為1 mm, 得到核函數響應值如圖4-2所示,圖中尖突部分分別出現在k = 2, 4, 7 (rad/mm)附近,參考頻散曲線,頻率與厚度之乘積為1 MHz×mm,在波數為 k = 2, 4, 7 (rad/mm)附近,各有一條頻散曲線通過,藉此可以驗證數值程式 無誤。 由頻散曲線得知,若摩擦層的厚度為1mm,工作頻率越高,在同一頻率 下核函數積分路徑經過的極點越多,積分時需要更大的積分範圍來包含所 有的極點,且核函數在極點附近具有奇異性,數值積分的計算量也要增加, 才能找出符合收斂條件的結果。當有極點存在時,負載所造成的位移場會 以導波(guided waves)的形式朝兩側傳遞出去。倘若沒有極點存在,表示在 滑座底部受力後產生的位移場不會以導波形式向外傳遞出去,只會影響作 用點附近的局部位移,很快的會消散掉。 4.1.2 波數積分 求解負載所造成的位移場需以數值積分方法作波數積分。摩擦層表面位移之頻域響應的通式如下: L T ikx I I dk e z k g z x I
) , , ( ) , , ( (4.1) 其中,核函數g(k,z)即為先前計算之uˆ(k,z)、wˆ(k,z)。 由於第三章推導的核函數對於k 0呈對稱或反對稱,積分時只考慮波 朝單(正 x )方向傳遞,最後再將結果乘以2即可,則(4.1)式的積分下限可以改 成k 0。(4.1)式之波數積分可分成兩部分處理,一部份是從k 0起之有限 積分IT,另一部份則是剩餘的尾部積分IL,表示如下 dk e z k g z x I ikx k T c
0 ) , , ( ) , , ( (4.2) dk e z k g z x I ikx k L c
) ( , , ) , , ( (4.3) T I 是包含極點存在範圍之積分,積分路徑需採如圖4-3(a)所示的避點積分方 式,避開奇異點。在波數的複數平面上,沿著極點的下方偏量(單位為1/mm) 的路徑進行數值積分。故之選定亦決定積分之準確性,若太小,積分路 徑太靠近極點,核函數的奇異性會造成數值計算的誤差隨之增大;若太 大,則波數積分函數會引入較強的衰減函數,亦會造成數值誤差。尾部積 分IL之核函數g(k,x3,)已不包含極點,其數值積分不受到極點之影響,收 斂較快。本文採用Lih與Mal [26]發展的波數積分方法,進行數值運算。將(4.1) 式改為 dk e k g x Is
s ikx 2 1 ) , ( ) , ( (4.4) 其中,gs(k,)為利用二階齊次多項式擬合的近似核函數
2 0 ) , ( m m m s k F k g (4.5)隨著增大。將波數積分的上下限、1 以線性轉換映射至2 1至1,則波數k 的轉換關係為 1 2 1 2 2 1 2 2 A A k (4.6) (4.4)式轉換為
d e K g x Is s i X 1 1 ) , ( ) , ( (4.7) 此處,核函數gs(k,)gs(,), iAx e A K 1 2 ,X A2x,利用二階齊次多 項式擬合之核函數可以表示成
2 0 ) , ( m m m s f g (4.8) 其中的三個係數f0、 f1、 f2可由gs(k,)決定(如附錄B)。故(4.7)式可以轉 換為 m m m s x K f I I
2 0 ) , ( (4.9) 其中,
d e Im m iX 1 1 此處, X X I0 2sin ,
X i X I I1 0 2cos , 2 0 1 2 I X i I I 在波數積分中,可將積分範圍等分成數個區段,每一個區段均由三個節 點組成之拋物線近似,計算每一區段下之面積(如圖4-4所示),直到滿足下 式的收斂條件後停止。error n p m n m n p J J J
) ( 2 1 ) 1 ( ) ( (4.10) 其中,積分值J之上標代表分割次數,下標代表在某次分割中所佔之區域。 此適應性積分(adaptive integration)之優點在於當覺得分割次數不夠而需繼 續分割時,原來分割點計算之數值均予保留,僅需計算新的分割點即可。 適當選擇收斂誤差 ,即可收斂至精確的積分值。error 4.2外加負載造成之位移結果
令摩擦層厚度為5m,IDT激發頻率為9.765MHz,利用前一節提到的波 數積分方法配合(3.14)與(3.15)式,可以計算外加負載所造成的位移。當有一 組集中負載px 1MPa,pz 1MPa,作用於原點座標x0,經數值積分後, 分別得到摩擦層下表面位移ul( x,0)、wl(x,0),結果如圖4-5(a)、(b)所示。令 x+ul為橫軸,wl為縱軸,當場點位置x 0.15 ~ 0.15 mm,集中負載所造成 摩擦層表面之位移場數值結果如圖4-6(a)所示,圖中顯示負載作用點以外的 地方也會有變形發生。將場點位置範圍拉長到x 2.5 ~ 2.5 mm,位移場的 數值計算結果如圖4-6(b)所示,圖中顯示離負載作用點越遠,位移衰減的越 快。 嘗試改變摩擦層厚度,令厚度分別為10m和25m,在相同的IDT激發 頻率與集中負載作用下,摩擦層下表面的位移場如圖4-7(a)、(b)所示,圖中 可知隨著摩擦層厚度增加,位移場的影響範圍也越大;厚度越小,離作用 點越遠的地方位移場的衰減越快。若以頻率與厚度相乘的乘積為橫軸坐標 觀察圖4-1所示的頻散曲線,發現當厚度為10m時,在積分範圍內沒有包 含任何極點,摩擦層受力所產生的位移場只會影響作用點附近的位移結 果,距離作用點越遠,位移場的影響越小。當厚度為25m時,積分範圍內包含了一個極點,位移以導波的形式向兩邊傳遞,因此位移場呈現波傳函 數eikx的振盪圖形。 當基板波形與摩擦層接觸時,接觸面上的接觸應力並非只有一組,考慮 兩 組 負 載 分 別 作 用 在 摩 擦 層 下 表 面 對 稱 的 兩 點 x10.005 mm , 005 . 0 2 x mm摩擦層厚度設為5m,IDT激發頻率為9.765 MHz,若兩組負 載都是正向力,(pz)x1 (pz)x2 1MPa,引致的水平位移u與鉛垂位移w分佈 如圖4-8所示,在作用點處具有較大的鉛垂位移,水平位移成反對稱分佈。 當兩組負載都是切線作用的摩擦力(px)x1 1MPa,(px)x2 1MPa,摩 擦層下表面位移分佈u與w如圖4-9所示,在兩作用點之間的鉛垂位移,受剪 力作用向上移動,水平位移則會向兩邊擴張。當兩組負載為向中間擠壓的 摩擦力,(px)x1 1MPa,(px)x2 1MPa,摩擦層下表面位移如圖4-10所示, 位移u與w的變化恰與圖4-9恰好相反。 當兩組負載以26.6 度斜角 ,作用在摩擦層下表面 ,(pz)x1 1MPa , 5 . 0 )
(px x1 MPa,(pz)x2 1MPa,(px)x2 0.5MPa,摩擦層下表面位移如 圖4-11所示,圖中顯示負載作用點上具有峰值,u受到切線力的影響往兩邊 擠壓。比較圖4-8~4-11的結果可以發現,鉛垂位移受到正向力的影響較大, 水平位移以摩擦力的影響為主。 4.3 接觸壓力與位移場之數值結果與討論 本文在計算分佈負載所造成的位移場時,先數值計算數個單一負載所造 成的位移場,再予以累加。摩擦層下表面每個負載的大小與預壓力、分割 數量有關。首先考慮受到均佈負載的情形,令每一組負載的大小為 length contact Δ preload x p px z , n xcontactlength 若接觸區介於0.045 mm與0.055 mm之間,預壓力平均分佈在接觸區內,圖
4-12所示結果為預壓應力等於10 MPa時,將接觸區分割成20段與100段,所 求得的位移場,場點位置範圍為0.15 ~ 0.15 mm,當分割數量越多,會使位 移場曲線越平滑。 若預壓力大小及接觸區範圍相同,當切線力為零,正向力分別設為弦波 分佈pz(x)p0cos(kx)與線性分佈pz(x)p0(10x0.45),其中, length contact Δ preload 0 x p 單位為N/mm2。正向負載所造成的位移場計算結果如圖4-13(b)、(d)所示。 若給定摩擦層下表面位移如圖4-14(a)、(b)所示,利用(3.13)式計算接觸應 力,切線力與正向力分布如圖4-14(c)(d)所示。 根據3.3節中所推導的(3.20)式得到摩擦層下表面的位移場,令相對速度 為 0 ) , 0 , ( ) (x u x t v vrel s 代入如圖4-15(a)所示的摩擦係數函數,摩擦係數函數之各項參數如表二所 示列,給定基板表面波形,令鉛垂位移w如圖4-15(b)所示,代入(3.20)式得 到滑座與基板間的正向壓力與摩擦力,結果如圖4-15(c)、(d)所示,圖中顯 示摩擦係數在接觸區兩側會由正值轉為負值,接觸區兩側的正向力也會突 然下降,摩擦力也具有相同的變化,將摩擦力與圖2-14相比較,所得到摩擦 力的合力確實可以將滑座往反方向推動,採用不同的摩擦係數函數,亦可 以得到類似的接觸壓力結果。綜合以上分析,本文所使用的方法可以適當 的模擬滑座所受到之摩擦力大小,前提是需給定適當的位移條件,在計算 相對速度時,將摩擦層的速度納入考慮,才可以得到正確的解。
第五章 結論與展望
本文整理摩擦理論相關的文獻後發現,摩擦特性可以利用數學式子表 示,不同的摩擦特性可以疊加方式整合到摩擦係數函數中。摩擦力與正向 力之間具有一個比例關係存在,摩擦係數與兩物體間的相對速度有關,計 算相對速度時,基板與滑座間為面接觸或點接觸決定滑座速度是否為定 值,問題分析前必須先定義清楚。 本文利用適當的假設將表面聲波馬達簡化成二維接觸問題,推導出彈性 摩擦層受負載後的動態位移響應,再以數值積分方法波數積分,求得摩擦 層表面的位移場。該波數積分的積分上下限為k ,在沒有封閉解的情 形下,採用數值方法來求解。由摩擦層的頻散曲線得知,當摩擦層的厚度 很厚或是負載的頻率很高時,導波波傳現象才會在摩擦層上發生。壓電馬 達轉子的摩擦層厚度通常僅有數個m,波數積分可以不用考慮導波波傳極 點的影響。 數值計算結果顯示不同負載造成的位移場間有相互影響,利用位移條件 計算負載分佈時,可以透過給定預壓力及其他額外的條件幫助收斂。利用 數值積分可以計算摩擦層下表面受負載作用產生的位移場,雖然沒有實驗 結果做驗證,仍然可由物理現象來驗證數值結果。 本文嘗試設定基板的變形,分析摩擦層與基板間的接觸應力與摩擦層最 終的位移,得到的摩擦力計算結果確實可以將滑座往反方向移動。但所給 定的位移條件(3.19)式並非真實摩擦層位移,無法得到正確的接觸應力。要 求得接觸應力大小需要有更周詳的條件,摩擦層與定子的相對速度計算方 式必須考慮摩擦層的變形速度,才能得到真正摩擦力。 本文從波動的觀點分析SAW馬達摩擦層的動態行為,將摩擦層與基板 視為等向性材料以方便討論,此種分析方法並不限用於表面聲波馬達,一般的超音波馬達亦可適用。此種分析方法可以建立摩擦層表面位移與外力 的關係,只要有位移或接觸應力其中一組條件,就可以分析位移場或是馬 達特性等參數,但是要得到真實的位移條件並不容易,需要尋找更多的條 件,以迭代(interation)方式求解。
參考文獻
[1] M. Kurosawa, M. Takahashi, and T. Higuch, “An ultrasonic XY stage using 10MHz surface acoustic wave,” IEEE Ultrason. Symp. Proc., 535-538, 1994.
[2] T. Morita, M. Kurosawa, and T. Higuchi, “Simulation of surface acoustoic wave motor with spherical slider,” IEEE Transctions on
Ultrasonics, Ferroelectrics, and Frequency Control, 46(4), 929-934,
1999.
[3] M. Kurosawa, H. Itoh, K. Asai, M. Takasaki, and T. Higuchi, “Optimization of slider contact face geometry for surface acoustic wave motor,” IEEE Ultrason. Symp. Proc., 252-255, 2001.
[4] T. Shigematsu, and M. K. Kurosawa, “Stepping motion analysis of surface acoustic wave motor toward nanometer resolution positioning system,” IEEE Ultrason. Symp., 1, 8-11, 2002.
[5] M. K. Kurosawa, H. Itoh, and K. Asai, “Elastic friction drive of surface acoustic wave motor,” Ultrasonics, 41, 271-275, 2003.
[6] P. J. Feenstra, and P. C. Breedveld “Analysis of a surface acoustic wave motor,” IEEE Ultrason. Symp., 2, 1133-1136, 2003.
[7] B. Armstrong-Helouvry, P. Dupont, and C. C. De Wit, “A survey of models, analysis tools and compensation methods for the control of machines with friction,” Automatica, 30(7), 1083-1138, 1994.
[8] C. C. de Wit, H. Olsson, K. J. Astrom, and P. Lischinsky, “A New model for Control of Systems with Friction,” IEEE Trans. on Auto.
Control, 40(3), 1995
[9] J. Swevers, F. Al-Bender, C. G. Ganseman, and T. Prajogo, “An integrated friction model structure with improved pre-sliding behavior for accurate friction compensation,” IEEE Trans. on Auto. Control,
45(4), 2000.
[10] P. Dupont, V. Hayward, B. Armstrong, and F. Altpeter, “Single state elastoplastic friction models,” IEEE Trans. on Auto. Control, 47(5), 2002.
[11] V. Lampaert, F. Al-Bender, and J. Swevers, “A generalized Maxwell-slip friction model appropriate for control purposes,” Physics
and Control, 2003. Proceedings. 2003 International Conference, 4,
1170-1177, 2003.
[12] S. Ueha, Y. Tomikawa, M. Kurosawa, and N. Nakamura, Ultrasonic
motors theory and applications, Clarendon Press.Oxford, 1993.
[13] P. Hagedorn, and J. Wallaschek, “Traveling wave ultrasonic motors, part I: working principle and mathematical modeling of the stator,” J. of
Sound and Vib., 155(1), 31-46, 1992.
[14] T. Maeno, T. Tsukimoto, and A. Miyake, “Finite element analysis of the rotor/stator contact in a ring-type ultrasonic motor,” IEEE Transctions
on Ultrasonics, Ferroelectrics, and Frequency Control, 39(6), 668-674,
1992.
[15] N. W. Hagood, and A. J. McFarland, “Modeling of a piezoelectric rotary ultrasonic motor,” IEEE Transctions on Ultrasonics, Ferroelectrics, and
Frequency Control, 42(2), 210-224, 1995.
[16] O. Y. Zharii, A. F. Ulitko, “Smooth contact between the running Rayleigh wave and a rigid strip,” ASME J. Applied Mech., 62, 362-367, 1995.
[17] O. Y. Zharii, “Adhesive contact between the surface wave and a rigid strip,” ASME J. Applied Mech., 62, 368-372, 1995.
[18] O. Y. Zharii, “Frctional contact between the surface wave and a rigid strip,” ASME J. Applied Mech., 63, 15-20, 1996.
ultrasonic traveling wave motor,” Int. J. Non-linear Mechanics, 31(6), 915-924, 1996.
[20] P. L. Moal, and P. Minotti, “A 2-D analytical approach of the stator-rotor contact problem including rotor bending effects for high torque piezomotor design,” Eur. J. Mech. A/Solids, 16(6), 1067-1103, 1997.
[21] F. Lu, H. P. Lee, and S. P. Lim “Contact modeling of viscoelastic friction layer of traveling wave ultrasonic motors,” Smart Mater. Struct.,
10, 314-320, 2001.
[22] H. Storck, and J. Wallaschek, “The effect of tangential elasticity of the contact layer between stator and rotor in traveling wave ultrasonic motors,” Int. J. Non-linear Mechanics, 38, 143-159, 2003.
[23] 羅世青, 表面聲波微步進馬達的特性量測, 國立交通大學機械工程 學系碩士論文, 2004
[24] Lord Rayleigh, “On waves propagated along the plane surface of a elastic solid,” Proc. London Math. Soc., 17, 4, 1985.
[25] R. M. White and F. W. Voltmer, “Direct piezoelectric coupling to surface elastic waves,” Appl. Phys. Lett, 7, 314-316, 1965.
[26] S. S. Lih, and A. K. Mal, “Elastodynamic response of a unidirectional composite laminate to concentrated surface loads: Part II,” ASME J. of