國 立 交 通 大 學
機 械 工 程 學 系
碩士論文
低接觸阻值微慣性開關之研發
Development Of A Inertial Micro Switch
With Low Contact Resistance
研 究 生:鐘政涵
指導教授:徐文祥 教授
低接觸阻值微慣性開關之研發
Development Of A Inertial Micro Switch
With Low Contact Resistance
研 究 生:鐘政涵 Student:Cheng-Han Chung
指導教授:徐文祥 Advisor:Wensyang Hsu
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A ThesisSubmitted Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
低接觸阻值微慣性開關之研發
研究生:鐘政涵
指導教授:徐文祥
國立交通大學機械工程學系 碩士班
摘 要
運輸業常有偵測數十 G 碰撞發生的需求,若使用被動式慣性開關做為檢測元件, 可具有安裝容易且不耗能的優點。而以往文獻中,被動式且以數十 G 為閾值的慣性開 關,常有接觸阻值過高(數 MΩ),或體積較大的問題。 本研究重點即在研發被動式、體積小、低接觸阻值且加速度閾值在數十 G 範圍的 微慣性碰撞開關。其作動機制是元件原為斷路,當受到某特定方向加速度閾值以上的 碰撞時,慣性力可使內部卡榫機構形成通路。在結構設計上,是將加速度感測方向設 定在出晶片平面向,再配合鎳基面型微加工技術,採用低電阻率的鎳製作可上下作動 的懸浮結構,因此可加大卡榫寬度以增加卡榫接觸面積。利用這兩項特點,以使數十 G 微慣性開關元件可同時具有低接觸阻值且體積小的優點。另外,在此所提出的設計, 也具有在僅改變懸浮彈簧厚度下,可提供不同加速度閾值的特點。 本慣性微開關已成功經電鍍製程完成,整體尺寸約 2 mm x 2 mm x 40 um,其中 彈簧、質量塊與卡榫結構的厚度分別為 3.58 um、37.48 um 與 21.51 um。在測試方面, 是以震動平台施加脈衝形式加速度於元件上,配合個人電腦截取加速度值與元件開關 訊號;當受到 17.22G 加速度時,成功得到卡榫開關狀態切換的訊號,與模擬所得加 速度值 17.0G 相比,約有 1.3%誤差;接觸阻值為 1.7KΩ,阻值低於 100KΩ,易於被 應用,非接觸阻值為 100MΩ,與接觸阻值差距大,容易以電路判斷訊號。Development Of A Inertial Micro Switch With Low Contact Resistance
Student:Cheng-Han Chung
Advisor:Wensyang Hsu
Department of Mechanical Engineering
National Chiao Tung University
Abstract
In need of detecting the impact acceleration ranging in several tens of G during transportation, using passive sensors is more convenient to setup and power-efficient. However, the passive inertial switches with the threshold acceleration value in several tens of G are facing to the problems of high contact-resistance or large size.
In this study, we develop a passive, small in size and low contact-resistance micro inertial switch with its threshold acceleration ranging in several tens of G. The latching mechanism in the inertial switch forms an open circuit just after been fabricated. If the inertial switch experienced the acceleration grea ter than the threshold value from its sensing direction, the latching mechanism would be locked and form a close circuit. Setting the sensing direction normal to the wafer plane and fabricating the suspension structures via nickel-based electro-plating technology, large contact area and low resistance ratio linkage can be achieved. With the two methods, the passive inertial switch with its threshold acceleration ranging in several tens of G can not only be small in size but also low in the contact resistance.
The main structure is realized successfully with its overall size in 2 mm × 2 mm × 40 um. During the inertial switch experiencing the pulse acceleration induced by the shaker, the
誌謝
想起在交大機械所兩年間,從一開始不太了解但又好奇的心情,到努力搜索並評 估題目的撞牆期,最後實現想法的過程中,真的覺得自我實現的悸動和用力實現的過 程才是最重要的;都是有了在這篇論文背後支持我、陪伴我、忍受我的那群人,才能 讓我不管在課業或生活上體會這麼多。 首先非常感謝我的家人,不管在哪個階段、作什麼事情,爸媽總是對我有信心, 給我在心靈上最重要的鼓勵,同時在經濟上給我協助,未來我會繼續努力,讓自己過 得更好;很期待妹妹振作後的衝勁,世界上還有很多事情等著我們去體驗看看,一起 加油吧! 其次要感謝我的指導教授徐文祥老師,對一開始思路不清又口條不行的我,不停 耐心地與我溝通,加強邏輯訓練,使我受用無窮;接著要感謝實驗室的夥伴們,博班 畢業的駿偉博士、家聖博士與博班的毅家、冏夫、一哥、A 斌,特別是駿偉與毅家學 長在製程經驗上的傳授與建議,才能讓我實現這個題目想法;已經畢業的 HD、拉可、 頭博、胖虎、TERU、小熊、小高各位學長,讓實驗室多了許多歡樂的笑聲,在修課 方面也給了很多建議和資源;和我同屆的碩班同學,更有一層奮鬥情感,感謝老江在 SEM 和軟體操作上的支援、和欣芸聊一堆有趣的笑話是我焦慮時暫時將腦袋放空的好 方法、松岳的電鍍製程教學和許多題目想法的討論、打屁功力一流的正鄴和我在口試 前一起緊張互相取暖的陪伴、佑明辛苦地處理實驗室的帳目、溫大哥辛苦的製程和廠 務工作,還有許多點點滴滴無法在這裡細細表達,但每件事情都令我難忘;還有碩一 的葉挺、瑞彬、政宏、禹同,特別是馬瑞彬跟我學習軟體和設計,到現在慢慢可以自 我發揮,還與葉挺在 SEM 方面對我的支援,認真的態度令我印象深刻,請你們繼續 加油! 還有隔壁徐瑞坤老師實驗室的朋友們在生活和研究上的關心、放鬆心情時的陪伴; 現在在世界各地努力奮鬥的大學、高中與國中同學,MSN 或電話上對大家近況的更新, 都讓我覺得很溫馨。 誠摯地希望大家都過得很好!謝謝你們! 政涵 2010 夏 風城目次
J une 2010. . . I I Hs i nchu, Tai wan, Republic of Chi na.. . . I I
摘要... I
Department of M echanical Engi neering. . . I I Nati onal Chiao Tung Universit y. . . I I
Abstract...II 誌謝... III 目次... IV 圖目次... VI 表目次...VII 1 1. . . 1 第一章 緒論...1 1.1 研究動機...1 1.2 文獻回顧...2 1.2.1 雙穩態機構式...3 1.2.2 雙穩態磁力分佈式...4 1.2.3 金屬液珠式...5 1.2.4 微卡榫機構式...7 1.3 研究目標...9 2 1. . . 10 第二章 新型卡榫式加速度開關...10 2.1 概念設計...10 2.2 細部設計與分析...12 2.3 製程...19 2.3.1 製程規劃...19 2.3.2 製作結果...21 2.4 量測...22 2.4.1 量測電路設計...22 2.4.2 量測電路架設...24 2.4.3 整體量測架設...24 2.4.4 量測控制方式...27 2.4.5 量測結果 - 確定元件可動性 ...28 2.4.6 量測結果 - 加速度閾值量測 ...30 3. . . 33 第三章 接觸電阻與加速度閾值理論與實驗值比較...33 3.1 接觸電阻...33 3.2 加速度閾值...34
參考文獻...39
圖目次
圖 1-1 ShockWatch®公司的 ShockLabel 產品 ...2 圖 1-2 卡榫式與非卡榫式加速度開關訊號輸出形式 ...2 圖 1-3 B. Todd 等人提出雙穩態機構式加速度開關 ...3 圖 1-4 雙穩態機構式加速度開關操作概念 ...4 圖 1-5 雙穩態磁力分佈式加速度開關原理示意圖 ...4 圖 1-6 J. Zhao 等人所提出雙穩態磁力分佈式加速度開關 ...5 圖 1-7 K. Yoo 等人提出之金屬液珠式加速度開關 ...6 圖 1-8 K. Yoo 等人提出之金屬液珠式加速度開關量測結果 ...6 圖 1-9 L. J. Currano 等人提出微卡榫式加速度開關...7 圖 1-10 L. J. Currano 等人提出微卡榫式加速度開關受力狀態動作分解圖...8 圖 2-1 卡榫式微加速度開關設計概念圖 ...10 圖 2-2 卡榫式微加速度開關設計概念沿 AA’之側視圖 ... 11 圖 2-3 卡榫式加速度開關之操作示意圖(a)受閾值加速度前(b)受閾值加速度後... 11 圖 2-4 卡榫式微加速度開關模擬示意圖(實線與虛線分別為變形前與後之曲線) ...12 圖 2-5 加速度閾值模擬知變數定義 (a)上視圖 (b) 卡榫機構沿 BB’側面視圖 ...13 圖 2-6 卡榫重疊長度 D 與加速度閾值的關係 ...16 圖 2-7 彈簧長度 L 對加速度閾值的關係...16 圖 2-8 卡榫式加速度開關依模擬後尺寸決定之模型 ...18 圖 2-9 光罩示意圖 (a)第一道光罩 (b)第二道光罩...19 圖 2-10 新型卡榫式加速度開關製程流程示意圖 ...21 圖 2-11 新型卡榫式加速度開關製程結果 SEM 照片...22 圖 2-12 卡榫式加速度開關量測電路設計 ...23 圖 2-13 量測電路實作結果 ...24 圖 2-14 加速度閾值量測整體架設 ...25 圖 2-15 波型產生器與電源供應器 ...26 圖 2-16 LabVie w 程式與訊號觀測介面 ...26 圖 2-17 脈衝波形變數定義 ...27 圖 2-18 振動機台輸出加速度與脈衝波形 low level 值之關係 ...27 圖 2-19 非卡榫式加速度開關作動行為 ...28 圖 2-20 給予卡榫式加速度開關 1G 加速度下 Vx 的變化 ...29 圖 2-21 給予卡榫式加速度開關 1.3G 加速度下 Vx 的變化 ...30表目次
表 1-1 文獻規格整理 ...8 表 2-1 尺寸變數意義 ...14 表 2-2 加速度閾值模擬固定變數 ...15 表 2-3 加速度閾值模擬固定變數 ...17 表 2-4 加速度閾值量測結果 ...31 表 3-1 接觸電阻理想值與實際值比較 ...33 表 3-2 結構尺寸設計與實作結果比較 ...361 1
第一章 緒論
1.1 研究動機
加速度感測的應用隨科技增進而越來越廣泛,在許多應用中,
比起截取連續加速度訊號,大於特定加速度值的發生與否更為重
要,如物流業在貨品運輸的過程中,為了得知物品是否因撞擊而
損毀,常需要偵測數十 G 碰撞加速度,以方便品管。
在偵測碰撞的過程中,若使用被動式感測器將帶來兩個好處:
一是在需要量測時,才從外部提供能量來得知感測器內部的變化,
而不一定需要即時量測,具有相當大的節能潛力;第二個優點是
由於不需要在量測過程中安裝電池與電路,使安裝更簡易。
現有市售產品方面中,綜合記錄加速度閾值符合物流業的需
求與被動式感測器的優點,ShockWatch
®公司的產品 ShockLabel
可說是目前最被廣泛使用的解決方案,圖 1-1是 ShockLabel外觀,
使用方法是將其貼附在物品上,若物品在運送過程中經歷特定加
速度值以上的撞擊,ShockLabel 上的顏色就會變化,依顏色變化
與否來判定物品是否完好。雖已是廣泛被使用的產品,但
圖 1-1 ShockWatch
®公司的 ShockLabel 產品[1]
總結以上的觀察,在被動式加速度開關領域中,已成功被應
用的案例少,而且還有很大的進步空間,這將構成本研究的動機,
希望開發一種新式被動加速度開關,除了加速度閾值可符合物流
業需求外,更希望體積小、成本低,且可經由電路讀取訊號。
1.2 文獻回顧
在加速度開關的分類中,可依訊號輸出方式分為卡榫式與非
卡榫式加速度開關,如圖 1-2 所示,非卡榫式加速度開關在閾值
加速度消失後,就停止輸出訊號;而卡榫式加速度開關在閾值加
速度消失後,仍然保持訊號輸出;由此可知非卡榫式加速度開關
只適用於即時量測,而卡榫式加速度開關才符合被動式感測器的
需求。
圖 1-2 卡榫式與非卡榫式加速度開關訊號輸出形式而在卡榫式加速度開關依照加速度閾值規格分類,大於 100G
的設計大多適用於火箭測試或飛彈引信[2-7],以下就 100G 以下
為加速度閾值的文獻以設計方式分類並細加說明。
1.2.1 雙穩態機構式
B. Todd 等人於 2009 年提出雙穩態機構式的設計[8-10],利用
Derlin 這種塑膠材料,經雷射切割成雙穩態構造如圖 1-3 所示,
其操作概念如圖 1-4所示,此開關可以記錄加速度感測方向約 10G
到數百 G 的碰撞後,保持在圖 1-4 中第一或第二穩態,以姿態變
化所造成的位移來導通電路,此接觸電阻在 100K 歐姆以下;此
開關整體最大尺寸約 2 公分,無法被批次製造,另外,以雷射切
割的方式造成同設計規格元件在製作上重現性低。
圖 1-3 B. Todd 等人提出雙穩態機構式加速度開關[10] 固定端 雙穩態桿件 雙穩態桿件 質量塊圖 1-4 雙穩態機構式加速度開關操作概念 (a)第一穩態 (b)第二穩態 [8]
1.2.2 雙穩態磁力分佈式
J. Zhao 等人於 2010 年提出以磁力分佈的方式[11],使質量塊
可停駐在兩穩態位置,如圖 1-5 所示。如圖 1-6 所示,當整體受
到感測方向 50G 閾值加速度時,造成質量塊位移而接觸銅塊,使
固定端與銅塊之間導通,此接觸電阻為 2 歐姆以下;因為磁力分
佈的關係,此加速度消失後,可動磁鐵使質量塊停駐在與銅塊接
觸的狀態。此開關最大尺寸約 2 公分,且製作上需經過複雜的組
裝過程。
圖 1-5 雙穩態磁力分佈式加速度開關原理示意圖[11] 加速度 感測方向圖 1-6 J. Zhao 等人所提出雙穩態磁力分佈式加速度開關[11]
1.2.3 金屬液珠式
K. Yoo 於 2010 年提出以金屬液珠通過截面積漸變通道的方
式,來設計一卡榫式加速度開關,如圖 1-7(b)所示,是此開關剛
完成製作,當受到加速度時,金屬液珠因慣性力往右移動,經過
截面積漸變流道,如圖 1-7(c),若此加速度大於閾值加速度,金
屬液珠就會停留在 1-7(d)狀態,導通兩電極。此元件測試結果如
圖 1-8 所示,閾值加速度皆在 10G 以下,接觸阻值未被提及,同
時最大尺寸約 1.5 公分。
質量塊 固定端 可動磁鐵 固定磁鐵 加速度 感測方向 銅塊圖 1-7 K. Yoo 等人提出之金屬液珠式加速度開關 [12] (a)整體元件圖(b)受加速度閾值前(c)受加速度閾值時 (d)受加速度閾值後
1.2.4 微卡榫機構式
L. J. Currano 等人於 2008 年提出以 SOI 晶片搭配 DRIE 製程,
製作微卡榫機構式開關[13],如圖 1-9(a)所示為整體元件上視圖,
圖 1-9(b)為微卡榫機構局部放大圖,此開關包含彈簧、質量塊與
卡榫機構,當受到 y 方向的加速度時,質量塊與基板產生相對位
移,卡榫機構上的 latch 和 mating piece 越來越靠近,如圖 1-10(a)
到圖 1-10(d)的動作分解,若此加速度大於閾值加速度,開關卡榫
將停留在圖 1-10(d)的狀態。此開關閾值加速度為 37.5G 到 75G,
最大尺寸約為 2.5 釐米,可經微機電製程達到批次量產的優點,
但此開關的卡榫接觸阻值為數 M 歐姆,很難以電路判斷開關的狀
態。
(b)圖 1-10 L. J. Currano 等人提出微卡榫式加速度開關受力狀態動作分解圖 [
13
] (a)受閾值加速度前 (b)受閾值加速度時 (c) 受閾值加速度時 (d)閾值加速度消失後 表 1-1 文獻規格整理由表 1-1 可觀察到,以數十 G 為加速度閾值的卡榫式加速度
開關中,除編號 1 微卡榫式作法之外,其他開關設計都可達到低
阻值(低於 100K 歐姆)的表現,但體積都在公分等級,且不一定可
以被批次量產,製作成本高;而體積小且成本低的微卡榫式加速
度開關又有接觸阻值過高的問題。
(a) (b) (c) (d)1.3 研究目標
本論文的研究目標主要是要設計一新型的卡榫式加速度開
關,並且以微機電製程技術來同時達到體積小且成本低的優點;
將加速度感測方向設定為晶片平面法向量,以光罩設計來提高卡
榫接觸面積,同時配合鎳基電鍍製程,以低電阻率的金屬材料製
作整體結構。透過這兩個方法,使數十 G(以 20G 為目標)為加速
度閾值的微型卡榫式加速度開關也有低接觸電阻(小於 100K 歐姆)
的表現。
2 1
第二章 新型卡榫式加速度開關
2.1 概念設計
為求卡榫機構式加速度開關的結構接觸面積增大以降低接觸阻
值,不同於文獻中的設計,我們將元件加速度的感測方向改定為出晶
片平面向,並以光阻塗佈、曝光、顯影、電鍍鎳的面型加工方式設計
此元件,可輕易加大接觸面積以降低接觸電阻值。此元件之設計示意
圖如圖 2-1 中所示,為一個以 Z 軸為感測方向的卡榫機構式加速度開
關,卡榫機構側面視圖如圖 2-2 所示:灰色結構為固定部分;黑色與
白色結構為可動部分,黑色區域為彈簧,白色區域是質量塊。其操作
示意圖如圖 2-3 所示:
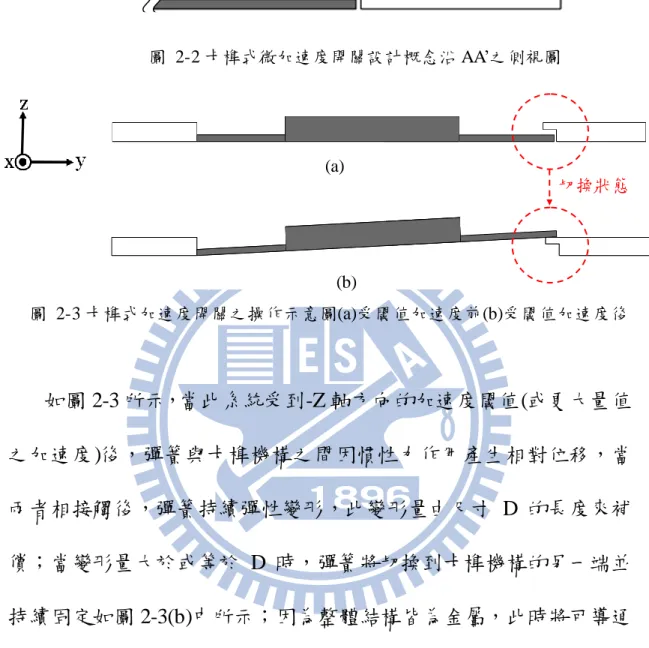
圖 2-1 卡榫式微加速度開關設計概念圖圖 2-2 卡榫式微加速度開關設計概念沿 AA’之側視圖 圖 2-3 卡榫式加速度開關之操作示意圖(a)受閾值加速度前(b)受閾值加速度後
如圖 2-3 所示,當此系統受到-Z 軸方向的加速度閾值(或更大量值
之加速度)後,彈簧與卡榫機構之間因慣性力作用產生相對位移,當
兩者相接觸後,彈簧持續彈性變形,此變形量由尺寸 D 的長度來補
償;當變形量大於或等於 D 時,彈簧將切換到卡榫機構的另一端並
持續固定如圖 2-3(b)中所示;因為整體結構皆為金屬,此時將可導通
固定端與卡榫結構端,以電路導通與否,作為是否感測到加速度閾值
之依據。
切換狀態 (a) (b)2.2 細部設計與分析
此加速度開關之設計在有限元素模擬中牽涉到動態與接觸問題,
以一般電腦的運算能力來說難以收斂,且非常耗時;因此我們利用材
料力學理論上的解析解,並以數值的方式找出相關尺寸設計。此元件
的操作歷程中,彈簧與卡榫機構接觸時的受力狀態在材料力學中可視
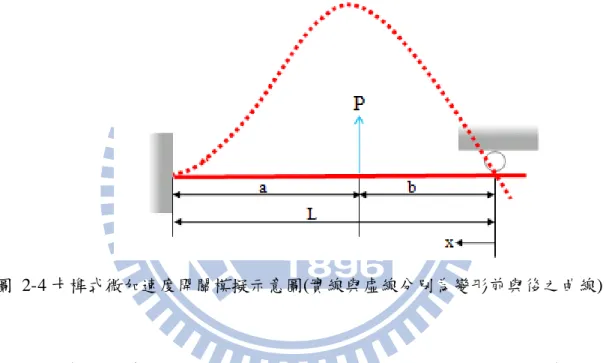
為一個一端 fixed、一端 roller supported 的樑,相關模型如圖 2-4 所示
圖 2-4 卡榫式微加速度開關模擬示意圖(實線與虛線分別為變形前與後之曲線)
圖 2-4 中實線和虛線分別為結構受力變形前和變形後的狀態示意。樑
變形後之位移可由公式(2-1)(2-2)表示
(2-1)
(2-2)
其中,E 為鎳材料之楊氏系數,I 為樑對 Z 軸之轉動慣量,P 為慣性
力。接著以數值方法將變形後的樑長度計算出,並定義為 L2,由於
結構由 D 長度補償,因此當受力 P 使得|L - L2| = D 時,判斷為結構
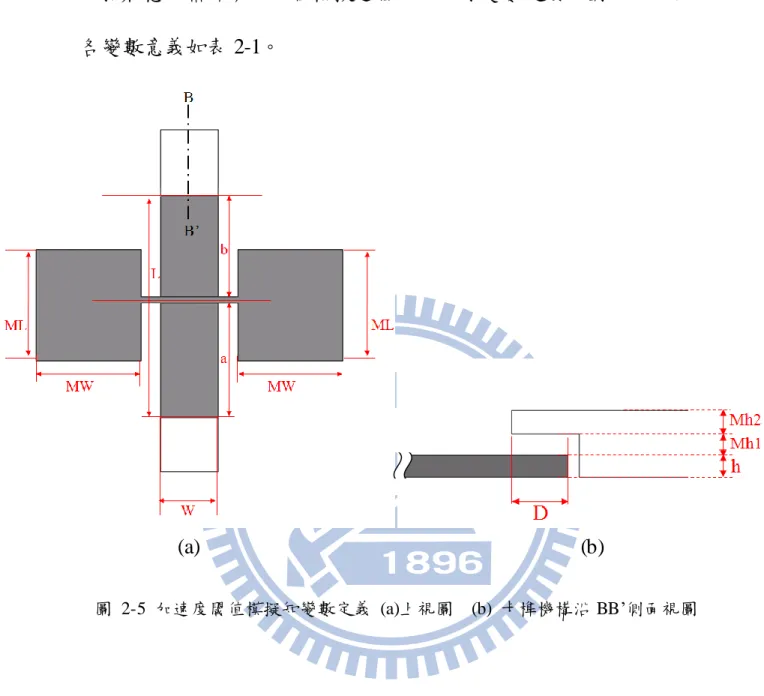
切換狀態的臨界條件。在模擬過程中,尺寸變數定義如圖 3-5 所示,
各變數意義如表 2-1。
(a) (b)
表 2-1 尺寸變數意義
電鍍厚度
h
第一次電鍍厚度(彈簧厚度)
Mh1
第二次電鍍厚度
Mh2
過電鍍厚度
h + Mh1 + Mh2
質量塊厚度
光罩設計
ML
質量塊長度
MW
質量塊寬度
L
彈簧長度
W
彈簧寬度
D
卡榫重疊長度
表 2-2 加速度閾值模擬固定變數
彈簧寬度(W)
400 (um)
彈簧厚度(h)
3.5 (um)
質量塊長度(ML)
2000 (um)
質量塊寬度(MW)
1000 (um)
第二次電鍍厚度(Mh1)
16 (um)
過電鍍厚度(Mh2)
20 (um)
材料楊氏系數(E)
1.6e11 ( Pa)
材料密度
8910 (kg/m
3)
我們對加速度閾值的設計目標為 20G。模擬開始前,固定變數設
定如表 2-2 所示,因此我們將先找出在不同彈簧長度 L 下,卡榫
機構重疊長度 D 與加速度閾值的關係,再觀察結果,找出 L 對加
速度閾值的關係來決定尺寸。模擬調變參數有彈簧長度 L 由 1500
微米到 2500 微米,同時卡榫重疊長度 D 由 1 微米到 20 微米;所
得結果如圖 2-6 所示,每條曲線都代表不同彈簧長度 L,可發現
每條曲線隨著 D 尺寸的增加,其加速度閾值也趨近於定值,可觀
圖 2-6 卡榫重疊長度 D 與加速度閾值的關係
接著固定 D 為 15 um,根據前面的數值計算結果,將 L 對加速度
閾值作圖如圖 2-7 所示,可決定 L 約為 2150 um,D 為 15 um。卡
榫機構式加速度開關之尺寸設計即完成如表 2-3 所示。圖 2-8 為
尺寸確立後,根據實際尺寸所繪製之元件示意圖。
圖 2-7 彈簧長度 L 對加速度閾值的關係表 2-3 加速度閾值模擬固定變數
h
3.5 (um)
D
15 (um)
L
2150 (um)
a
1025 (um)
b
1025 (um)
W
400 (um)
ML
2000 (um)
MW
1000 (um)
Mh1
16 (um)
Mh2
20 (um)
材料 E 值
1.6e11 ( Pa)
材料密度
8910 (kg/m
3)
加速度閾值
20G
(a) (b) 圖 2-8 卡榫式加速度開關依模擬後尺寸決定之模型
2.3 製程
2.3.1 製程規劃
確立尺寸後,以 2D 圖像軟體 Laker 繪製光罩,並委託交大奈米
中心實作光罩。本開關製作流程中包含兩次模仁製作,第一道模仁製
作用來製作彈簧與質量塊厚度 h;第二道模仁用來增加質量塊厚度
Mh1;之後以第二道模仁的形狀進行過電鍍製程,進行過電鍍,累積
厚度為 Mh2 來製作卡榫機構;因此需兩片光罩,截取單個元件在軟
體上的光罩圖形如圖 2-9 所示
為了確保開關在操作時,金屬結構之間不接觸情況下,兩電極
之間為絕緣狀態,本製程選用已成長了 5000 埃二氧化矽的矽晶片
進行鎳基電鍍製程,製程如圖 2-10 所示。
(a) 製作光阻犧牲層。 (b) 濺鍍鈦/銅當作電鍍種子層。 (c) 製作第一道光阻模仁。 (d) 進行第一道鎳電鍍。 (f) 去除第一道模仁後,製作第二道模仁。 (g) 進行第二道鎳電鍍,填滿模仁高度。 (h) 過電鍍鎳,使鎳材料高於模仁,製作卡榫機構。(i) 以丙銅去除光阻模仁。 (j) 以氨水/雙氧水去除銅,之後以丙銅去除光阻犧牲層並同時將鈦 lift-off。 圖 2-10 新型卡榫式加速度開關製程流程示意圖
2.3.2 製作結果
卡榫式加速度開關製作後以電子束顯微鏡 SEM 檢視,如圖
2-11 所示,圖 2-11(a)為整體上視圖,圖 2-11(b)為彈簧結構,圖
2-11(c)為卡榫機構,圖 2-11(d)為卡榫機構側面視圖。由圖中可發
現電鍍過程中,可能因為氣泡產生,導致質量塊上有些許塊狀缺
陷,但整體結構大致上已順利製造成功。
(a) (b) (c) (d) 圖 2-11 新型卡榫式加速度開關製程結果 SEM 照片 (a) 整體上視圖 (b) 彈簧 (c) 卡榫機構 (d) 卡榫機構側面視圖
2.4 量測
2.4.1 量測電路設計
由於卡榫式加速度開關在開關前後是由阻值不同來判斷結
構是否互相接觸,因此可視為一可變電阻。整體電路設計如圖
2-12 所示,其中 Rx 為卡榫式加速度開關所構成的可變電阻,與
之匹配的固定電阻為 R1、R2 和 R3,電阻值分別為 100K 歐姆、
10 歐姆、100K 歐姆,並設定 Vcc 電位為 1 伏特,在 Rx 變化同
時,Vx 電位也會跟著改變,並且由相關電路公式推得 Vx 如公式
(2-3)所示
(2-3)
在最理想的狀況下,受閾值加速度之前,結構不相接觸,Rx 電阻
值為無限大,此時由於 R1 電阻值與 R3 相同,Vx 為 0.5 伏特;受
閾值加速度之後,結構相接觸,Rx 電阻值為 0 歐姆,由於 R2 電
阻值遠小於 R1,因此 Vx 電位會逼近 Vcc 為 1 伏特。另外,觀察
Vx 變化的同時,也可以由式(3)推得 Rx 接觸阻值。
2.4.2 量測電路架設
依照量測電路設計,將電阻焊接到 PCB 板上如圖 2-13 所示,
Vx 端將由個人電腦 LabView 程式截取電位變化。
圖 2-13 量測電路實作結果2.4.3 整體量測架設
我們以振動機台 LDS V406-PA100E 給與卡榫式加速度開關
振動加速度,同時以 MMA1200 加速度計量取加速度。整體架設
如圖 2-14 所示
圖 2-14 加速度閾值量測整體架設
另外以電源供應器分別提供 Vcc 為 1 伏特給卡榫式加速度開
關,5 伏特給 MMA1200,波型產生器訊號傳送到振動機台上,
可決定振動加速度的形式與大小,相關儀器如圖 2-15 所示;同時
以 LabView 程式記錄 Vx 電位變化,LabView 程式介面如圖 2-16
所示,可監測 Vx 電位變化與 MMA1200 輸出訊號。
卡榫式加速度開關 MMA1200 加速度計 LDS V406-PA100E 振動機台圖 2-15 波型產生器與電源供應器
2.4.4 量測控制方式
為了模擬碰撞加速度發生,波型產生器將輸出脈衝波形給與
振動機台,相關變數定義如圖 2-17 所示。進行量測時,固定參數
為 duty cycle 為 99.98 % ,high level 為 0 伏特,P 為 4 秒,持續
降低 low level 的值,可逐漸增加加速度量值,配合觀測 Vx 訊號
輸出,可決定 low level 需低於多少才可使振動平台輸出閾值加速
度。
經過振動機台以脈衝波形輸入並同時觀察加速度輸出的測
試,有助於我們以 low level 電壓值來反推加速度值。如圖 2-18
所示,當脈衝波形的量值越高,振動機台輸出加速度值也越高,
且在低加速度值範圍裡標準差較小,
2.4.5 量測結果 - 確定元件可動性
為了確定懸浮結構在釋放過程中沒有沾黏情況產生,我們先
由波型產生器輸出弦波給振動機台,並逐漸增加弦波振幅,同時
觀察卡榫式加速度開關是否具有非卡榫式的作動行為。
如圖 2-19 所示,為非卡榫式加速度開關作動行為示意圖,若
在加速度感測方向所受到足夠的慣性力量,卡榫式加速度開關的
彈簧末端將會接觸到卡榫機構,但不卡住;若可經由弦波震盪非
卡榫式加速度開關而發現此種訊號輸出,就可確定結構釋放成
功。
圖 2-19 非卡榫式加速度開關作動行為如圖 2-20 所示,當給與卡榫式加速度開關約 1G 震盪時,量測
電路上的 Vx 電位停留在約 0.5 伏特無反應。
(a) (b) 圖 2-20 給予卡榫式加速度開關 1G 加速度下 Vx 的變化 (a)振動平台輸出加速度 (b)卡榫式加速度開關輸出訊號隨著波型產生器輸出的弦波振幅增加,振動機台輸出至 1.3G 震
盪左右,Vx 開始出現訊號輸出如圖 2-21 所示,在受加速度達
一定大小以上時,Vx 變化為約 1 伏特,而隨受力減小,Vx 又
回到 0.5 伏特,在此目的在於確定元件可動,定性結果出現即
可,因此不進一步探討定量結果。
(a) (b) 圖 2-21 給予卡榫式加速度開關 1.3G 加速度下 Vx 的變化 (a)振動平台輸出加速度 (b)卡榫式加速度開關輸出訊號
2.4.6 量測結果 - 加速度閾值量測
加速度閾值量測結果如表 2-4 所示,隨著波型產生器 low
level 值降低,達-0.58 伏特後,開始發生非卡榫式加速度開關行
為,彈簧結構接觸到卡榫機構,但不卡住;當 low level低達-0.745
伏特時,卡榫機構卡住,呈現非卡榫式機構的行為,將最後一
次震盪資料繪製出來,如圖 2-22 所示,閾值加速度為 17.22G。
在震盪發生前,Vx 電位為 0.4894 伏特,震盪發生後,Vx 為 1.013
伏特,並且在碰撞加速度消失後,依然維持住 1.013 伏特。至
此,卡榫式加速度開關在阻值與加速度閾值量測已結束,成功
得到了卡榫式加速度開關的工作特性。加速度閾值量測,以
SEM 檢視卡榫卡住的情形,如圖 2-23 所示。
表 2-4 加速度閾值量測結果
low level (V) 是否接觸 是否 latch
-0.54 × × -0.56 × × -0.58 × × -0.6 ○ × -0.62 ○ × -0.64 ○ × -0.66 ○ × -0.68 ○ × -0.7 ○ × -0.72 ○ × -0.725 ○ × -0.73 ○ × -0.735 ○ × -0.74 ○ × -0.745 ○ ○ (a)
(a) (b)
(c) (b) 圖 2-23 加速度開關卡榫卡住情形
3
第三章 接觸電阻與加速度閾值理論與實驗值比較
3.1 接觸電阻
接觸電阻量測與理論結果如表 3-1 所示,固定參數部分 R2
誤差最大,高達約 85%,但 18.5 歐姆的阻值還是遠比 R1 與 R3
小,因此影響量測結果小。由公式(3-1)可知道當 Rx 遠大於其他
電阻時,Vx 將會收斂到某值如公式(3-2)所示,
(3-1)
(3-2)
將實際值帶入公式(3-2)的結果如圖 3-1 所示,當 Rx 到達 20G 歐姆
時,Vx 值將收斂至 0.4992 伏特,實驗結果發現 Vx,open 的電壓值
小於 0.4994 伏特;可得到 Rx,close 為 1.7K 歐姆,Rx,close 為 100M
歐姆。
表 3-1 接觸電阻理想值與實際值比較 變數名稱 理想值 實際值 固定參數 Vcc 1 (V) 1.032 (V) R1 100K (Ω) 97.4K (Ω) R2 10 (Ω) 18.5 (Ω) R3 100K (Ω) 100.4 (Ω)圖 3-1 Vx 隨 Rx 增大而收斂情形
3.2 加速度閾值
卡榫式加速度開關的厚度尺寸,由於直接決定卡榫重疊長度
和質量塊大小,因此特別在厚度方向以 SEM 仔細量測,如圖 3-2
所示,彈簧寬度設計值與實驗值的不同,主要來自過曝光的誤差,
誤差值為 3 %。 設計值與實作值如表 3-2 所示,其中 h、D、Mh1、
Mh2 這幾個變數可由圖 3-3(a)知道所代表的厚度,由圖 3-3(a)可
知道尺寸量測結果。將表 3-2 中的尺寸帶入公式(2-1)、式(2-2)中,
可得到加速度理論閾值為 17.0 G,與實驗值 17.22G 比較,誤差為
1.3%。
圖 3-2 卡榫式加速度開關於曝光製程誤差
(a) (b) 圖 3-3 卡榫式加速度開關厚度方向量測結果
表 3-2 結構尺寸設計與實作結果比較 變數 設計值 實作值 h 3.5 (um) 3.3 (um) D 15 (um) 15.97 (um) L 2150 (um) 2165 (um) a 1025 (um) 1083 (um) b 1025 (um) 1083 (um) W 400 (um) 415 (um) ML 2000 (um) 2015 (um) MW 1000 (um) 1015 (um) Mh1 16 (um) 17.16 (um) Mh2 20 (um) 22.7 (um)
材料 E 值 1.6e11 ( Pa) 1.6e11 ( Pa)
材料密度 8910(kg/m3) 8910(kg/m3)
第四章 結論
4
4.1 總結
成功實現一卡榫式加速度開關,其加速度理論閾值為 17.0 G,
與實驗值 17.22G 比較,誤差為 1.3%。接觸阻值在受到加速度閾
值之前為 100M 歐姆,形同斷路;之後為 1.7K 歐姆,遠小於目標
阻值上限 100K 歐姆與非接觸阻值 100M 歐姆。
4.1.1 設計
我們設計了一卡榫式加速度開關,將其加速度感測方向設定
在出晶片平面向,配合鎳基電鍍製程,配合光罩設計增加卡榫機
構接觸面積,以低電阻率的鎳材料構成彈簧與質量塊等懸浮結構
與固定的卡榫機構;整體最大尺寸為 2.5 釐米,僅為 B Todd 等人
與 J. Zhao 等人所設計的雙穩態式加速度開關的八分之一倍,K.
Yoo 等人所設計的金屬液珠式加速度開關的六分之一倍,且可被
批次製造,深具降低成本的潛力;在接觸阻值方面,僅為 L. J.
Currano 等人所設計微卡榫機構式開關的千分之一倍。
此設計使得被動式數十 G 加速度開關,也可以有體積小、成
4.1.2 製程
以電鍍製程進行製作的卡榫式加速度開關,可以同樣光罩、
僅改變各階段電鍍厚度的尺寸,作出不同加速度為閾值的開關。
以本研究的光罩尺寸設計來說,僅改變第一次電鍍厚度為 4 微米、
5 微米時,分別可得 30G、50G 為閾值的卡榫式加速度開關。
4.1.3 量測
經量測電路設計與架設,以波型產生器與震動機台決定給予
MMA1200 校正用加速度規與卡榫式加速度開關振動的形式與大
小,同時配合個人電腦、NI 擷取卡與 LabView 程式,可推算得
加速度閾值與接觸阻值。
4.2 未來工作
本卡榫式加速度開關經多次的實驗發現具有重複使用性的潛
力,但現有震動平台可提供的最大加速度只達 40G,未來將建立
重物掉落測試平台,提供更高的加速度值,來取得以脈衝型式加
速度使其訊號開關的結果;另外,若實驗可驗證此設計可重複使
用,將再進一步建立由卡榫機構卡住到釋放過程的模型,來預測
回覆閾值加速度。
參考文獻
[1] ShockWatch® ShockLabel Datasheet
[2] D. R. Ciarlo, "A Latching Accelerometer Fabricated By The Anisotropic Etching Of (110) Oriented Silicon Wafers", J. Micromech. Microeng. 2 10, 1992
[3] X.Q. Sun, S. Zhou, W. N. Carr, "A Surface Micromachined Latching Accelerometer", Transducers '97, International Conference On Solid-State Sensors
And Actuators Chicago, June 16-19, 1997
[4] Z. Y. Guo, Z. C. Yang, L. T. Lin, Q. C. Zhao, H.T. Ding , X. S. Liu, X. Z. Chi, J. Cui, G. Z. Yan, "A Latching Acceleration Switch With Multi-Contacts Independent To The Proof-Mass", IEEE MEMS Conference 25-29 January,
Sorrento, Italy , 2009
[5] Z.Y. Guo, Q. C. Zhao, L. T. Lin, H. T. Ding, X. S. Liu, J. Cui, Z. C. Yang, H. Xie, G Z Yan, "An Acceleration Switch With A Robust Latching Mechanism And Cylindrical Contacts”, J. Micromech. Microeng. 20 055006 , 2010
[6] L. J. Currano, M. Yu, B. Balachandran, ” Latching In A MEMS Shock Sensor : Modeling And Experiments”, Sensors And Actuators A 159 41–50, 2010
[7] Z.Y. Guo, Q. C. Zhao, L. T. Lin, Z. C. Yang, H. Xie, G. Z. Yan, ”Normally On/Off Integrated Latching Acceleration Switch With Controlled Fracture Beams And Independent Multi-contact”, IEEE Electron Device Letters, Vol. 31, No. 2,
2010
[8] B. J. Hansen, C. J. Carron, B. D. Jensen, A. R. Hawkins, S. M. Schultz, “Plastic Latching Accelerometer Based On Bistable Compliant Mechanisms”, Smart Mater.
Struct. 16 1967, 2007
[9] B. Todd, M. Phillips, S. M. Schultz, A. R. Hawkins, B. D. Jensen, “RFID Threshold Accelerometer”, IEEE AUTOTESTCON Salt Lake City, UT, 8-11
September, 2008
[10] B. Todd, M. Phillips, S. M. Schultz, A. R. Hawkins, B. D. Jensen, “Low-Cost RFID Threshold Shock Sensors”, IEEE Sensors Journal, Vol. 9, No. 4, April 2009 [11] J. Zhao, Y. Yang, H. Wang, J. Jia, “A Novel Magnetic Actuated Bistable
Acceleration Switch With Low Contact Resistance”, IEEE Sensors Journal, Vol.
10, No. 4, April, 2010
![圖 1-1 ShockWatch ® 公司的 ShockLabel 產品[1] 總結以上的觀察,在被動式加速度開關領域中,已成功被應 用的案例少,而且還有很大的進步空間,這將構成本研究的動機, 希望開發一種新式被動加速度開關,除了加速度閾值可符合物流 業需求外,更希望體積小、成本低,且可經由電路讀取訊號。 1.2 文獻回顧 在加速度開關的分類中,可依訊號輸出方式分為卡榫式與非 卡榫式加速度開關,如圖 1-2 所示,非卡榫式加速度開關在閾值 加速度消失後,就停止輸出訊號;而卡榫式加速度開關在閾值加](https://thumb-ap.123doks.com/thumbv2/9libinfo/8141145.166679/11.893.137.763.421.818/本研究在加速度開關分類中可依訊號輸出方式分為卡榫式卡榫值加.webp)
![圖 1-4 雙穩態機構式加速度開關操作概念 (a)第一穩態 (b)第二穩態 [8] 1.2.2 雙穩態磁力分佈式 J. Zhao 等人於 2010 年提出以磁力分佈的方式[11],使質量塊 可停駐在兩穩態位置,如圖 1-5 所示。如圖 1-6 所示,當整體受 到感測方向 50G 閾值加速度時,造成質量塊位移而接觸銅塊,使 固定端與銅塊之間導通,此接觸電阻為 2 歐姆以下;因為磁力分 佈的關係,此加速度消失後,可動磁鐵使質量塊停駐在與銅塊接 觸的狀態。此開關最大尺寸約 2 公分,且製作上需經過複](https://thumb-ap.123doks.com/thumbv2/9libinfo/8141145.166679/13.893.302.768.122.341/雙穩態移而接觸銅塊固定端與銅塊之間導通此接觸電阻為歐姆過複.webp)
![圖 1-6 J. Zhao 等人所提出雙穩態磁力分佈式加速度開關[11] 1.2.3 金屬液珠式 K. Yoo 於 2010 年提出以金屬液珠通過截面積漸變通道的方 式,來設計一卡榫式加速度開關,如圖 1-7(b)所示,是此開關剛 完成製作,當受到加速度時,金屬液珠因慣性力往右移動,經過 截面積漸變流道,如圖 1-7(c),若此加速度大於閾值加速度,金 屬液珠就會停留在 1-7(d)狀態,導通兩電極。此元件測試結果如 圖 1-8 所示,閾值加速度皆在 10G 以下,接觸阻值未被提及,同 時最大尺寸約](https://thumb-ap.123doks.com/thumbv2/9libinfo/8141145.166679/14.893.238.736.118.272/變通道右移動經截面積漸變流道如若此加速度大於閾值加屬液寸約.webp)
![圖 1-7 K. Yoo 等人提出之金屬液珠式加速度開關 [12] (a)整體元件圖(b)受加速度閾值前(c)受加速度閾值時 (d)受加速度閾值後](https://thumb-ap.123doks.com/thumbv2/9libinfo/8141145.166679/15.893.189.740.117.1101/之金屬液珠式加速度開關整體件圖受加速度閾值受加速度閾值受加.webp)
![圖 1-10 L. J. Currano 等人提出微卡榫式加速度開關受力狀態動作分解圖 [ 13 ] (a)受閾值加速度前 (b)受閾值加速度時 (c) 受閾值加速度時 (d)閾值加速度消失後 表 1-1 文獻規格整理 由表 1-1 可觀察到,以數十 G 為加速度閾值的卡榫式加速度 開關中,除編號 1 微卡榫式作法之外,其他開關設計都可達到低 阻值(低於 100K 歐姆)的表現,但體積都在公分等級,且不一定可 以被批次量產,製作成本高;而體積小且成本低的微卡榫式加速 度開關又有接觸阻值](https://thumb-ap.123doks.com/thumbv2/9libinfo/8141145.166679/17.893.250.683.110.451/a受閾值可觀察到以數為加閾值卡榫式加速度開關編號一定可以被批次.webp)