Research Article
A Real-Time Pothole Detection Approach for Intelligent
Transportation System
Hsiu-Wen Wang,
1Chi-Hua Chen,
2Ding-Yuan Cheng,
3Chun-Hao Lin,
2and Chi-Chun Lo
11Institute of Information Management, National Chiao Tung University, Hsinchu 300, Taiwan
2Telecommunication Laboratories, Chunghwa Telecom Co., Ltd., Taoyuan 326, Taiwan
3Department of Information Management, Hwa Hsia University of Technology, New Taipei 235, Taiwan
Correspondence should be addressed to Chi-Hua Chen; [email protected] Received 14 August 2014; Revised 4 December 2014; Accepted 9 December 2014 Academic Editor: Jung-Fa Tsai
Copyright © 2015 Hsiu-Wen Wang et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In recent years, fast economic growth and rapid technology advance have led to significant impact on the quality of traditional transport system. Intelligent transportation system (ITS), which aims to improve the transport system, has become more and more popular. Furthermore, improving the safety of traffic is an important issue of ITS, and the pothole on the road causes serious harm to drivers’ safety. Therefore, drivers’ safety may be improved with the establishment of real-time pothole detection system for sharing the pothole information. Moreover, using the mobile device to detect potholes has been more popular in recent years. This approach can detect potholes with lower cost in a comprehensive environment. This study proposes a pothole detection method based on the mobile sensing. The accelerometer data is normalized by Euler angle computation and is adopted in the pothole detection algorithm to obtain the pothole information. Moreover, the spatial interpolation method is used to reduce the location errors from global positioning system (GPS) data. In experiments, the results show that the proposed approach can precisely detect potholes without false-positives, and the higher accuracy is performed by the proposed approach. Therefore, the proposed real-time pothole detection approach can be used to improve the safety of traffic for ITS.
1. Introduction
In recent years, fast economic growth and rapid technology advance have led to significant impact on the quality of traditional transport system. Intelligent transportation sys-tem (ITS), which aims to improve the transport syssys-tem, has become more and more popular. For the safety of traffic, road users often feel uncomfortable when they drive on the rough roads, especially the potholes on the road. In accordance with the statistics from the Ministry of Justice in Taiwan, the national compensation money is about 240
million dollars from 2008 to 2011 [1]. The pothole on the
road causes serious harm to drivers’ safety. Therefore, drivers’ safety may be improved with the establishment of real-time pothole detection system for sharing the pothole information. Moreover, more and more sensors which include G-sensors, electronic compass, gyroscope, global positioning system (GPS), microphone, and cameras are equipped in
mobile device (e.g., smartphone and iPad). Several applica-tions use these sensors in mobile devices and combine mobile sensing techniques to solve problems such as social network
[2], healthcare [3], environment monitoring [4], and traffic
information [5]. Therefore, using the mobile device based on
mobile sensing techniques to detect potholes is suitable and convenient.
This study proposes a pothole detection method based on the mobile sensing and shares the pothole information with road users and government. For this purpose, the mobile device should be equipped with G-sensors and GPS to collect accelerometer data and location information. The accelerometer data is normalized by Euler angle computation and is adopted in the pothole detection algorithm to obtain the pothole information. Moreover, the spatial interpolation method is used to reduce the location errors from GPS data. Then the pothole information is made public to improve the safety of traffic.
Volume 2015, Article ID 869627, 7 pages http://dx.doi.org/10.1155/2015/869627
The remainder of the paper is organized as follows.
Section 2presents and discusses the various techniques of image recognition method and mobile sensing method for
pothole detection. In Section 3, this study proposes a
real-time pothole detection method based on mobile sensing. This study also illustrates the experiment results and analyses in
Section 4. Finally, this study concludes the paper inSection 5.
2. Related Work
Some pothole detection methods have been proposed and can be classified into two groups: image recognition method and mobile sensing method. The advantages and short-comings of these methods are presented in the following subsections.
2.1. Image Recognition Method. Yu and Salari proposed a
pothole detection approach based on laser imaging tech-niques to collect road information. Then the artificial neural network algorithm (ANN) was used to analyze the road
information and detect potholes [6]. However, this approach
which requires a big computation power to recognize the laser images is unsuitable for mobile devices.
Lin and Liu used the support vector machine algorithm (SVM) to analyze images about road information for pothole
detection [7]. Although this approach can provide high
accuracy, a big computation power is required for image recognition. Therefore, this approach is also unsuitable for mobile devices.
2.2. Mobile Sensing Method. For BusNet project, the
G-sensor and GPS are equipped in the on-board unit (OBU) in bus to collect accelerometer data and location information. These data can be sent to data processing center via wireless networks, and data processing center can analyze these data to check whether the vectors of accelerometer data exceed the
thresholds for pothole detection [8]. However, this approach
requires that the batch accelerometer data is sent when bus enters the bus station. Therefore, this approach cannot provide real-time pothole detection information.
The pothole patrol system which was proposed by a project team from Massachusetts Institute of Technology
combined G-sensor and GPS. This system analyzed the
𝑥-axis accelerometer data and𝑧-axis accelerometer data and
equipped five data filters which include(1) speed, (2)
high-pass,(3) 𝑧-peak, (4) 𝑥𝑧-ratio, and (5) speed versus 𝑧 ratio
[9]. Although these data filters can detect potholes, only
𝑧-peak of data filter can obtain the precise pothole information.
However, high misjudgment of𝑧-peak of data filters with the
surge of road.
Nericell project used a smartphone based on Windows Mobile operation system which is equipped with G-sensor and GPS to collect and analyze accelerometer data for pothole
detection [10]. However, the smartphone in this project
should be equipped with the specific angle. Furthermore, this
project only considered analyzing𝑧-axis accelerometer data
with high misjudgment.
Mednis et al. proposed four pothole detection approaches
which include (1) Z-THRESH approach, (2) Z-DIFF
approach,(3) STDEV-Z approach, and (4) G-ZERO approach
to analyze the accelerometer data [11]. The accelerometer
data in this study is obtained from Tmote sensors, Texas
Instruments controllers, and Analog Devices G-sensors [12].
However, the results of Z-THRESH approach and G-ZERO approach would be influenced by peak value to generate more false-positives. The results of Z-DIFF approach and STDEV-Z approach are dependent on frequency and timing. Therefore, the design and comparisons of these approaches for mobile device require to be investigated.
2.3. Summary. In summary, due to the requirement of big
computation power for image recognition method, too many resources are allocated for this method to be an efficiency mobile device. Therefore, mobile sensing method is more suitable to detect potholes for mobile device. However, pre-vious pothole detection approaches based on mobile sensing only considered one threshold to detect pothole, and high false-positives are obtained from these approaches.
Conse-quently, this study considers Mednis’s approaches [11] and
proposes a real-time pothole detection method to improve the accuracy of pothole detection method.
3. Real-Time Pothole Detection Method
The proposed real-time pothole detection method based on
mobile sensing includes three steps:(1) accelerometer data
normalization, (2) pothole detection approaches, and (3)
pothole location determination.
3.1. Problem Definition. Some shortcomings are in previous
pothole detection methods as follows: (1) mobile device
should be equipped with the specific angle; (2) high
false-positives may be generated with considering only one
thresh-old for pothole detection;(3) the precise pothole location has
not been investigated.
Therefore, this study proposes a real-time pothole detec-tion method based on mobile sensing to collect and normal-ize the accelerometer data from mobile device for free angle establishment. Furthermore, a pothole detection algorithm is proposed to consider several thresholds and combine several pothole detection approaches for pothole detection accuracy improvement. Finally, the space interpolation method is adopted to determine pothole location for leaving shortcom-ings.
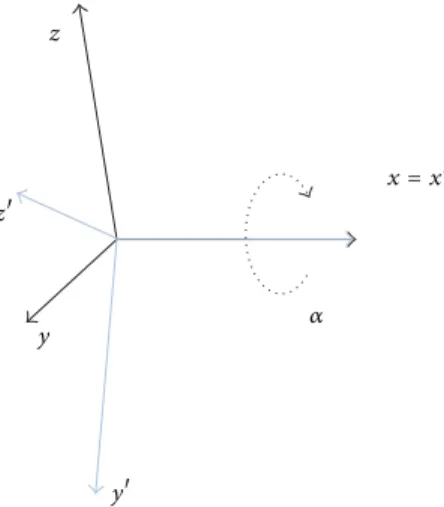
3.2. Accelerometer Data Normalization. For solving the
lim-itation of the specific angle in previous pothole detection approaches, this study uses Euler angle formulas to nor-malize the three-axis accelerometer data. The Euler angles describe the vector set in 3-dimensional Euclidean space three parameters and represent a sequence of three elemental
rotations. For example,Figure 1shows that the vector set of
accelerometer data is defined as{𝑥, 𝑦, 𝑧}. The 𝑥𝑦𝑧system
rotates about the𝑥-axis by angle𝛼. The 𝑦-axis is now at
angle𝛼 with respect to the 𝑦-axis, and the 𝑧-axis is now
z z y y 𝛼 x = x
Figure 1: A case study of Euler angles (the𝑥𝑦𝑧 system rotates about the𝑥-axis by angle𝛼).
Euler angle formulas, the vector set{𝑥, 𝑦, 𝑧} can be calculated
by adopting the values of vector set{𝑥, 𝑦, 𝑧} and angle 𝛼
(shown in formulas(1)). Furthermore, the vector of each axis
can be calculated by using Euler angle formulas when the
system rotates about the𝑦-axis by angle𝛽 and 𝑧-axis by
angle𝛾 (shown in formulas(2)). Therefore, the vector of each
axis with 0 degree angle is referred to as baseline in this study.
In runtime stage, the vector set{𝑥, 𝑦, 𝑧} can be calculated
by adopting the vector set of baseline and rotation angle for accelerometer data normalization:
[𝑥 𝑦 𝑧] = [𝑥 𝑦 𝑧] [ [ 1 0 0 0 cos 𝛼 − sin 𝛼 0 sin 𝛼 cos 𝛼 ] ] , 𝑥 = 𝑥, 𝑦 = 𝑦× (cos 𝛼) + 𝑧× (sin 𝛼) , 𝑧 = 𝑦× (− sin 𝛼) + 𝑧× (cos 𝛼) , (1) [𝑥 𝑦 𝑧] = [𝑥 𝑦 𝑧] [ [ cos𝛽 0 sin 𝛽 0 1 0 − sin 𝛽 0 cos 𝛽 ] ] , 𝑥 = 𝑥× (cos 𝛽) + 𝑧× (− sin 𝛽) , 𝑦 = 𝑦, 𝑧 = 𝑥× (sin 𝛽) + 𝑧× (cos 𝛽) , [𝑥 𝑦 𝑧] = [𝑥 𝑦 𝑧] [ [ cos𝛾 − sin 𝛾 0 sin𝛾 cos 𝛾 0 0 0 1 ] ] , 𝑥 = 𝑥× (cos 𝛾) + 𝑦× (sin 𝛾) , 𝑦 = 𝑥× (− sin 𝛾) + 𝑦× (cos 𝛾) , 𝑧 = 𝑧. (2)
3.3. Pothole Detection Approaches. This study considers the
previous four pothole detection approaches and proposes a pothole detection algorithm to combine these approaches for pothole detection improvement. The notations of these approaches are defined and summarized in Notations.
3.3.1. The First Pothole Detection Approach: Z-THRESH. The Z-THRESH approach considers the minimum value of
𝑧-axis accelerometer data as the threshold to detect pothole.
The value of𝑧-axis accelerometer data is about −9.80065 m/s2
when the G-sensor is laid horizontally. Moreover, the value
of 𝑧-axis accelerometer data is lower than −9.80065 m/s2
when the G-sensor is dropped off. Therefore, the 𝑧-axis
accelerometer data drops off quickly when the car enters
a pothole. Then 𝑧-axis accelerometer data increases when
the car leaves a pothole. Therefore, this study considers the
lowest value of𝑧-axis accelerometer data through a pothole in
experimental runs. Furthermore, the maximum value of the
minimum value of𝑧-axis accelerometer data in each run is
selected as the threshold𝜃1which is suitable to detect pothole
for each experimental run (shown in formula(3)). In runtime
stage, the value of𝑓1(𝑔𝑎,𝑖,𝑗) is 1 when the value of 𝑔𝑎,𝑖,𝑗is lower
than𝜃1for pothole detection (shown in formula(4)).
The value of threshold is
𝜃1= max 𝑎=1,1≤𝑖≤𝑛,𝑖∈𝑁𝑒𝑖≤𝑗≤𝑙min𝑖,𝑗∈𝑁 𝑔𝑎,𝑖,𝑗. (3) Detection function is 𝑓1(𝑔𝑎,𝑖,𝑗) = {1, if 𝑔0, others,𝑎,𝑖,𝑗≤ 𝜃1 where𝑎 = 1, 1 ≤ 𝑖 ≤ 𝑛, 𝑖 ∈ 𝑁, 𝑗 ∈ 𝑁. (4)
3.3.2. The Second Pothole Detection Approach: Z-DIFF. The Z-DIFF approach considers the maximum difference of two
consecutive 𝑧-axis accelerometer records as the threshold
to detect pothole. Due to much decreasing and increasing
of𝑧-axis accelerometer data through a pothole, the velocity
of variation of𝑧-axis accelerometer data between time 𝑡𝑖,𝑗−1
and time 𝑡𝑖,𝑗 is calculated and used to detect pothole.
Therefore, this study retrieves the largest value of velocity of
variation of𝑧-axis accelerometer data through a pothole in
experimental runs. Furthermore, the minimum value of the maximum value of variation velocity in each run is selected
as the threshold 𝜃2 which is suitable to detect pothole for
each experimental run (shown in formula(5)). In runtime
stage, the value of𝑓2(𝑔𝑎,𝑖,𝑗) is 1 when the value of |𝑔𝑎,𝑖,𝑗 −
𝑔𝑎,𝑖,𝑗−1|/(𝑡𝑖,𝑗 − 𝑡𝑖,𝑗−1) is larger than 𝜃2 for pothole detection
(shown in formula (6)). However, the limitation of this
approach is difficult to determine the time difference between 𝑡𝑖,𝑗−1and𝑡𝑖,𝑗, and the accuracy of this approach is influenced by this time difference.
The value of threshold is
𝜃2= min
𝑎=1,1≤𝑖≤𝑛,𝑖∈𝑁𝑒𝑖≤𝑗≤𝑙max𝑖,𝑗∈𝑁
𝑔𝑎,𝑖,𝑗− 𝑔𝑎,𝑖,𝑗−1
Detection function is 𝑓2(𝑔𝑎,𝑖,𝑗) ={{{{ { 1, if 𝑔𝑎,𝑖,𝑗𝑡 − 𝑔𝑎,𝑖,𝑗−1 𝑖,𝑗− 𝑡𝑖,𝑗−1 ≥ 𝜃2 0, others, where 𝑎 = 1, 1 ≤ 𝑖 ≤ 𝑛, 𝑖 ∈ 𝑁, 𝑗 ≥ 1, 𝑗 ∈ 𝑁. (6)
3.3.3. The Third Pothole Detection Approach: STDEV(Z).
The STDEV(Z) approach considers the maximum standard
deviation of 𝑧-axis accelerometer data as the threshold to
detect pothole. Due to the perturbation motion of 𝑧-axis
accelerometer data through a pothole, the standard deviation
of𝑧-axis accelerometer data during 𝐾 records is calculated
and used to detect pothole. Therefore, this study gets the
max-imum value of standard deviation of 𝑧-axis accelerometer
data through a pothole in experimental runs. Furthermore, the minimum value of the maximum value of standard
deviation in each run is selected as the threshold𝜃3which is
suitable to detect pothole for each experimental run (shown
in formula(7)). In runtime stage, the value of𝑓3(𝑔𝑎,𝑖,𝑗) is 1
when the value of√∑𝑗𝑘=𝑗−𝐾+1(𝑔𝑎,𝑖,𝑘− 𝜇𝑖,𝑗)2/𝐾 is larger than
𝜃3 for pothole detection (shown in formula (8)). However,
the limitation of this approach is difficult to determine the
value of𝐾 which means time period, and the accuracy of this
approach is influenced by this time period. The value of threshold is
𝜃3=𝑎=1,1≤𝑖≤𝑛,𝑖∈𝑁min 𝑒 max 𝑖≤𝑗≤𝑙𝑖,𝑗∈𝑁 √ ∑𝑗𝑘=𝑗−𝐾+1(𝑔𝑎,𝑖,𝑘− 𝜇𝑖,𝑗)2 𝐾 , where𝜇𝑖,𝑗=∑ 𝑗 𝑘=𝑗−𝐾+1𝑔𝑎,𝑖,𝑘 𝐾 . (7) Detection function is 𝑓3(𝑔𝑎,𝑖,𝑗) = { { { { { { { 1, if √∑ 𝑗 𝑘=𝑗−𝐾+1(𝑔𝑎,𝑖,𝑘− 𝜇𝑖,𝑗)2 𝐾 ≥ 𝜃3 0, others, where 𝑎 = 1, 1 ≤ 𝑖 ≤ 𝑛, 𝑖 ∈ 𝑁, 𝑗 ≥ 𝐾, 𝑗 ∈ 𝑁, 𝜇𝑖,𝑗= ∑ 𝑗 𝑘=𝑗−𝐾+1𝑔𝑎,𝑖,𝑘 𝐾 . (8)
3.3.4. The Fourth Pothole Detection Approach: G-ZERO. The G-ZERO approach considers all three-axis accelerometer
data and selects a lower bound and upper bound to detect pothole for accuracy improvement. When a car passes through a pothole, all values of three-axis accelerometer data are near to zero. Therefore, this study considers the largest value of three-axis accelerometer data through a pothole as a candidate of lower bound and the lowest value of three-axis accelerometer data through a pothole as a candidate of upper bound. Then the minimum value of the maximum value of three-axis accelerometer data in each run is selected
as the lower bound 𝜃4,1, and the maximum value of the
minimum value of three-axis accelerometer data in each run
is selected as the upper bound𝜃4,2 (shown in formulas(9)
and(10)). In runtime stage, the value of𝑓4(𝑔𝑎,𝑖,𝑗) is 1 when
the value of𝑔𝑎,𝑖,𝑗is larger than𝜃4,1and is lower than𝜃4,2for
pothole detection (shown in formula(11)).
The value of lower bound is
𝜃4,1= min
𝑎∈{1,2,3},1≤𝑖≤𝑛,𝑖∈𝑁𝑒𝑖≤𝑗≤𝑙max𝑖,𝑗∈𝑁
𝑔𝑎,𝑖,𝑗. (9)
The value of upper bound is
𝜃4,2= max 𝑎∈{1,2,3},1≤𝑖≤𝑛,𝑖∈𝑁𝑒𝑖≤𝑗≤𝑙min𝑖,𝑗∈𝑁𝑔𝑎,𝑖,𝑗. (10) Detection function is 𝑓4(𝑔𝑎,𝑖,𝑗) = {1, if 𝜃0, others,4,1≤ 𝑔𝑎,𝑖,𝑗≤ 𝜃4,2 where 𝑎 = {1, 2, 3} , 1 ≤ 𝑖 ≤ 𝑛, 𝑖 ∈ 𝑁, 𝑗 ∈ 𝑁. (11)
3.3.5. The Fifth Pothole Detection Approach: Proposed Approach. This subsection proposes a pothole detection
approach which combines and improves the Z-THRESH and G-ZERO approaches to detect pothole. Furthermore, the Z-DIFF and STDEV(Z) approaches are limited in accordance with time differences and time periods, so these two approaches are not adopted. The pseudocode of the proposed pothole detection approach is presented in
Algorithm 1. The input parameters of this proposed approach are three-axis accelerometer data, and the value of output is 1 when the proposed pothole detection approach supposes the car passed through a pothole. In the proposed approach, the parameter check method is used to record whether the value of𝑓1(𝑔𝑎,𝑖,𝑗) or 𝑓4(𝑔𝑎,𝑖,𝑗) is 1. When one of Z-THRESH and
G-ZERO approaches supposes that the car passed through
a pothole, the timestamp 𝑡𝑖,𝑗 is recorded and compared
with the parameter check time. The value of output is 1 if
𝑡𝑖,𝑗-𝑐ℎ𝑒𝑐𝑘 𝑡𝑖𝑚𝑒 is smaller than 𝜀 seconds, which means a
pothole is detected. Furthermore, the parameter check time can be trained and learned by historical data from each practical run.
3.4. Pothole Location Determination. For pothole location
determination, this study uses the space interpolation
method to obtain precise pothole location.Figure 2 shows
that two locations (i.e.,𝐿1 and𝐿2) and timestamps (i.e.,𝑡1
and𝑡2) obtained from GPS module are adopted in the space
interpolation method to determine the pothole location. The
function𝑑(𝐿1, 𝐿2) is defined as the distance between location
𝐿1and location𝐿2. Therefore, the pothole location𝐿𝑝can be
determined by using 𝑑 (𝐿1, 𝐿𝑝) =𝑑 (𝐿1, 𝐿2) × (𝑡2− 𝑡1) (𝑡3− 𝑡1) , 𝑑 (𝐿2, 𝐿𝑝) =𝑑 (𝐿1, 𝐿2) × (𝑡3− 𝑡2) (𝑡3− 𝑡1) . (12)
Input: 𝑔𝑎,𝑖,𝑗, where𝑎 = {1, 2, 3}, 1 ≤ 𝑖 ≤ 𝑛, 𝑖 ∈ 𝑁, 𝑗 ∈ 𝑁
Output: The value of output is 1 when the proposed pothole detection approach
supposes the car passed through a pothole.
Set check method = 0 set check time = 0 while (𝑗 ∈ 𝑁)
if (𝑡𝑖,𝑗-check time) > 𝜀 sec then
check method = 0 check time = 0
end if
if 𝑓1(𝑔1,𝑖,𝑗) = 1 then
if check method = 0 then
check method = 1 check time =𝑡𝑖,𝑗
else if check method = 4 then return 1 else check time =𝑡𝑖,𝑗 end if end if if 𝑓4(𝑔𝑎,𝑖,𝑗) = 1 then
if check method = 0 then
check method = 4 check time =𝑡𝑖,𝑗
else if check method = 1 then return 1 else check time =𝑡𝑖,𝑗 end if end if end while
Algorithm 1: The pseudocode of the proposed pothole detection approach.
d(L1, L2) × (t2− t1) (t3− t1) d(L1, L2) × (t3− t2) (t3− t1) GPS location L1at time t1 GPS location L2at time t3 at time t2 Pothole location Lp
Figure 2: The space interpolation method for pothole location determination.
4. Experimental Results
This section discusses the analyses of experimental results for accelerometer data normalization, pothole detection approaches, and pothole location determination.
4.1. The Analyses of Accelerometer Data Normalization. For
the analyses of accelerometer data normalization, this study
gives two case studies which include(1) the mobile device
with 0 degree angle as baseline (shown inFigure 3) and(2) the
mobile device with−15 degree angle (i.e., the value of 𝛼 is −15
inFigure 1) (shown inFigure 4). Then the𝑡-test and 𝐹-test are
Figure 3: A case study of the mobile device with 0 degree angle as baseline.
used to verify the difference between the𝑧-axis accelerometer
data of baseline in Case 1 and the𝑧-axis accelerometer data
after accelerometer data normalization in Case 2.
This study uses two-tailed𝑡-test to determine significance
of the difference between the mean of𝑧-axis accelerometer
data of baseline in Case 1 (𝜇1= −9.8489) and the mean of
𝑧-axis accelerometer data after accelerometer data
normaliza-tion in Case 2 (𝜇2 = −9.8476). The sample sizes of Case 1
15∘
Figure 4: A case study of the mobile device with−15 degree angle.
determine significance of the difference between the variance
of 𝑧-axis accelerometer data of baseline in Case 1 (𝜎12 =
0.000077) and the variance of 𝑧-axis accelerometer data after
accelerometer data normalization in Case 2 (𝜎22= 0.000085).
Table 1shows the𝑡-test and 𝐹-test for the population means and variances of samples in Case 1 and Case 2. Experimental
results indicate that the null hypothesis (H0:𝜇1 = 𝜇2) in
𝑡-test is accepted, and another null hypothesis (H0:𝜎1 = 𝜎2) in
𝐹-test is also accepted. Therefore, using Euler angle formulas to normalize the accelerometer data from mobile device is suitable for free angle establishment.
4.2. The Accuracy of Pothole Detection Approach. For the
analyses of accuracy of pothole detection approach, this study selects a pothole (length: 58 cm; weight: 51 cm; and
depth: 6 cm) as a case study (shown in Figure 5) and 10
runs in experiment environment. The mean frequency of accelerometer data detection in G-sensor in mobile device is
124 counts/second. The𝑘-fold cross-validation [13] is used to
verify the accuracy of pothole detection approach. In
exper-iments, training and testing are performed 10 times (i.e.,𝑘 =
10). In iteration 𝑖, the accelerometer data in 𝑖th run therapy is selected as the test corpus, and the accelerometer data in other runs is collectively used to train the thresholds for
each approach.Table 2shows the comparisons of Z-THRESH
approach, Z-DIFF approach, STDEV(Z) approach, G-ZERO approach, and the proposed approach. The results show that the proposed approach can precisely detect potholes without false-positives and the accuracy of the proposed approach is 100%. Furthermore, this study also implemented and compared common machine learning methods which include ANN, SVM, and decision tree (DT) (shown in
Table 3). Although these machine learning methods can detect potholes, several false-positives are generated by them.
4.3. The Error of Pothole Location Determination. For the
analyses of error of pothole location determination, this study uses the accelerometer data and location information
from 10 runs inSection 4.2to verify the space interpolation
method. The results show that the error of pothole location determination is reduced from 17.47 meters to 11.74 meters after using the space interpolation method. Therefore, the space interpolation method is suitable to determinate the precise pothole location.
6 cm 51 cm
58 cm
Figure 5: A case study of a pothole in University Road, Hsinchu, Taiwan.
Table 1: The test results for accelerometer data with normalization. The value of𝑧-axis accelerometer data
mean (standard deviation) The 0 degree angle
(baseline) −9.8489 (0.000077)
The−15 degree angle after
normalization −9.8476 (0.000085)
Table 2: The false positive of each pothole detection approach. Detection
method 𝑍-THRESH 𝑍-DIFF STDEV(𝑍) 𝐺-ZERO Proposedmethod
False-positive 49 40 274 8 0
Table 3: The comparisons of different machine learning methods.
Detection method ANN SVM DT
False-positive 1626 255 282
5. Conclusions and Future Work
This study proposes a real-time pothole detection method based on the mobile sensing techniques. This method uses Euler angle computation to normalize the accelerometer data obtained from mobile device with free angle establishment. Moreover, a pothole detection approach is proposed to be combined with Z-THRESH and G-ZERO approaches for reducing the false-positives of pothole detection. Fur-thermore, the spatial interpolation method is adopted to obtain precisely the location of pothole. In experiments, the results show that the proposed approach can precisely detect potholes without false-positives and the accuracy of the proposed approach is 100%. Therefore, the proposed real-time pothole detection approach can be used to improve the safety of traffic for ITS.
However, the limitation of this study is sample size. In the future, more practical results will be retrieved and analyzed to deploy the proposed method everywhere. Furthermore, due to the limited battery capacity of mobile device, the issue about saving of computation power can be investigated. A green pothole detection approach is needed to reduce the frequency of accelerometer data detection with high accuracy of pothole detection.
Notations
𝑔𝑎,𝑖,𝑗: The acceleration of the𝑎th axle of the 𝑗th
record in the𝑖th run
𝑡𝑖,𝑗: The timestamp of the𝑗th record in the 𝑖th
run
𝑛: The number of runs
𝑒𝑖: The𝑒𝑖th entering pothole record in the𝑖th
run
𝑙𝑖: The𝑙𝑖th leaving pothole record in the𝑖th
run
𝑎: The coordinate axis of G-sensor in mobile
device (e.g., the value of𝑎 is 1 which
means𝑍-axis)
𝑓𝑚(⋅): The output of the 𝑚th pothole detection
approach (e.g., the value of𝑓1(⋅) is 1 when
the first pothole detection approach supposes that the car passed through a pothole)
𝐾: The third pothole detection approach
requires𝐾 records to calculate the
standard deviation
𝜃𝑚: The value of threshold for the𝑚th
approach
𝜃4,1: The value of lower bound for the fourth
pothole detection approach
𝜃4,2: The value of upper bound for the fourth
pothole detection approach.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
The research is supported by the National Science Council of Taiwan under Grants nos. NSC 102-2622-H-009-001-CC3, NSC102-2410-H146-002-MY2, NSC 102-2410-H-009-052-MY3, and MOST 103-2622-H-009-001-CC3.
References
[1] Ministry of Justice, National Compensation Statistics, and Statistics of Justice, 2012,http://www.moj.gov.tw/ct.asp?xItem =36988&CtNode=11625&mp=095.
[2] E. Miluzzo, N. D. Lane, K. Fodor et al., “Sensing meets mobile social networks: The design, implementation and evaluation of the CenceMe application,” in Proceedings of the 6th ACM
Conference on Embedded Networked Sensor Systems (SenSys ’08), pp. 337–350, Raleigh, Calif, USA, November 2008.
[3] C.-C. Lo, C.-H. Chen, D.-Y. Cheng, and H.-Y. Kung, “Ubiqui-tous healthcare service system with context-awareness capabil-ity: design and implementation,” Expert Systems with
Applica-tions, vol. 38, no. 4, pp. 4416–4436, 2011.
[4] C. I. Wu, H. Y. Kung, C. H. Chen, and L. C. Kuo, “An intelligent slope disaster prediction and monitoring system based on WSN and ANP,” Expert Systems with Applications, vol. 41, no. 10, pp. 4554–4562, 2014.
[5] C.-H. Chen, H.-C. Chang, C.-Y. Su, C.-C. Lo, and H.-F. Lin, “Traffic speed estimation based on normal location updates and call arrivals from cellular networks,” Simulation Modelling
Practice and Theory, vol. 35, no. 1, pp. 26–33, 2013.
[6] X. Yu and E. Salari, “Pavement pothole detection and severity measurement using laser imaging,” in Proceedings of the IEEE
International Conference on Electro/Information Technology (EIT ’11), pp. 1–5, Mankato, Minn, USA, May 2011.
[7] J. Lin and Y. Liu, “Potholes detection based on SVM in the pavement distress image,” in Proceedings of the 9th International
Symposium on Distributed Computing and Applications to Busi-ness, Engineering and Science (DCABES ’10), pp. 544–547, Hong
Kong, August 2010.
[8] K. de Zoysa, C. Keppitiyagama, G. P. Seneviratne, and W. W. A. T. Shihan, “A public transport system based sensor network for road surface condition monitoring,” in Proceedings of the
Workshop on Networked Systems for Developing Regions, Kyoto,
Japan, August 2007.
[9] J. Eriksson, L. Girod, B. Hull, R. Newton, S. Madden, and H. Balakrishnan, “The pothole patrol: using a mobile sensor network for road surface monitoring,” in Proceedings of the 6th
International Conference on Mobile Systems, Applications, and Services (MobiSys ’08), pp. 29–39, June 2008.
[10] P. Mohan, V. N. Padmanabhan, and R. Ramjee, “Nericell: rich monitoring of road and traffic conditions using mobile smartphones,” in Proceedings of the 6th ACM Conference on
Embedded Network Sensor Systems, Raleigh, NC, USA, 2008.
[11] A. Mednis, G. Strazdins, R. Zviedris, G. Kanonirs, and L. Selavo, “Real time pothole detection using Android smartphones with accelerometers,” in Proceedings of the International Conference
on Distributed Computing in Sensor Systems (DCOSS ’11), pp. 1–
6, IEEE, Barcelona, Spain, June 2011.
[12] R. Zviedris, A. Elsts, G. Strazdins, A. Mednis, and L. Selavo, “LynxNet: wild animal monitoring using sensor networks,” in
Proceedings of the 4th International Conference on Real-world Wireless Sensor Networks, Colombo, Sri Lanka, 2010.
[13] J. Han and M. Kamber, Data mining: Concepts and Techniques, Morgan Kaufmann, San Francisco, Calif, USA, 2006.
Submit your manuscripts at
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Mathematics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Mathematical Problems in Engineering
Hindawi Publishing Corporation http://www.hindawi.com
Differential Equations
International Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex Analysis
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Optimization
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Journal of Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporation http://www.hindawi.com Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Discrete Mathematics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014