PID tuning rules for SOPDT systems: Review
and some new results
Rames C. Panda, Cheng-Ching Yu,
*
Hsiao-Ping Huang
Department of Chemical Engineering, National Taiwan University, Taipei 106-17, Taiwan共Received 23 November 2002; accepted 17 August 2003兲 Abstract
PID controllers are widely used in industries and so many tuning rules have been proposed over the past 50 years that users are often lost in the jungle of tuning formulas. Moreover, unlike PI control, different control laws and structures of implementation further complicate the use of the PID controller. In this work, five different tuning rules are taken for study to control second-order plus dead time systems with wide ranges of damping coefficients and dead time to time constant ratios (D/). Four of them are based on IMC design with different types of approximations on dead time and the other on desired closed-loop specifications共i.e., specified forward transfer function兲. The method of handling dead time in the IMC type of design is important especially for systems with large D/ ratios. A systematic approach was followed to evaluate the performance of controllers. The regions of applicability of suitable tuning rules are highlighted and recommendations are also given. It turns out that IMC designed with the Maclaurin series expan-sion type PID is a better choice for both set point and load changes for systems with D/ greater than 1. For systems with D/ less than 1, the desired closed-loop specification approach is favored. © 2004 ISA—The Instrumentation, Systems, and Automation Society.
Keywords: PID control; Controller tuning; Maclaurin series; Internal model control; Second-order plus dead time process
1. Introduction
In spite of innovations in predictive and ad-vanced control techniques, most of the chemical industries until today use PID loops. In process control applications more than 95% of the control-lers are of PID type. The maintenance and opera-tion of PID controllers are easy and also they are robust in nature. It has been mentioned that more than 98% of the control loops in pulp and paper industries are controlled by PI loops. A PI control-ler, generally recommended for first-order plus dead time共FOPDT兲 dynamics, has two tuning pa-rameters 共controller proportional gain Kc and
in-tegral time constant I). The ideal continuous time domain PI controller has the following struc-ture:
K⫽PI⫽Kc
冉
1⫹ 1 is冊
.
There are many tuning formulas available for PI controllers in the literature. Ziegler and Nichols 关1兴, Astrom and Hagglund 关2兴, Cohen and Coon 关3兴, and Tyreus and Luyben 关4兴 proposed tuning methods based on the process reaction curve. The Tyreus and Luyben tuning rule, based on fre-quency domain ultimate values, performs better for processes with a low D/ ratio. Rivera et al. 关5兴 and Zhuang and Atherton 关6兴 discussed tuning based on performance minimization criteria. Smith and Corripio 关7兴 presented tuning rules
us-*Corresponding author. Tel: ⫹886-2-3365-1759; fax:
⫹886-2-23623040. E-mail address: [email protected]
TRANSACTIONS
ISA Transactions 43共2004兲 283–295
ing the direct synthesis design method. The model based tuning rule, namely, IMC 关8兴, is explained in the literature.
Due to the high frequency gain of the derivative term, the closed-loop performance of processes 共with a large D/ ratio兲 with PID controllers may not give significant achievement over the same with PI. But some observers have found that the PID controllers perform better in making the re-sponse faster than PI and have been reported to be superior for FOPDT processes with large dead time to time constant ratios 共Luyben 关9兴兲. These controllers are sufficient for processes where the dominant dynamics are of the second-order type. Chen and Seborg 关10兴 and Lee et al. 关11兴 have presented PID tuning rules for SOPDT systems. Huang et al.关12兴 presented inversed based design methods with a modified PID controller for differ-ent kinds of model structures. In general, there are four PID structures available in the literature. The use of the ideal PID controller, with the following structure, is limited due to its sensitivity with noisy signals共we call it PID0兲:
K⫽PID0⫽Kc
冉
1⫹ 1 Is⫹Ds
冊
.The two most common types of PID controller with the following series and parallel structures are widely used in the industry. The series PID takes the form of
K⫽PID1⫽Kc
冉
1⫹ 1 Is冊冉
Ds⫹1 ␣Ds⫹1
冊
.
This is termed as PID1 and the parallel PID has the following structure:
K⫽PID2⫽Kc
冉
1⫹ 1 Is⫹ Ds ␣Ds⫹1冊
.It is denoted as PID2. The above-mentioned PID controllers have three tuning parameters,KC, I,
and D. Another type of PID controller includes the filter to the ideal PID. That is,
K⫽PID3⫽Kc
冉
1⫹ 1 Is⫹D s冊冉
1 fs⫹1冊
.Thus this PID3 structure has four tuning param-eters.
In general, there are two different ways to derive PID tuning parameters: frequency domain and
time domain techniques. Both techniques can use parametric and nonparametric models. In this work we use tuning rules involving parametric models. A desired closed-loop trajectory is speci-fied in the direct synthesis approach. The accuracy of the tuning rules depends on the accuracy of process-parameter identification methods. In the literature, the number of PID tuning rules for SOPDT processes are very few compared to the same for FOPDT systems. Some of the tuning rules work better for set-point changes and some of them are better for load disturbance. Chen and Seborg关10兴 used Taylor’s series expansion of time delay terms and presented tuning rules for FOPDT as well as SOPDT processes using the direct syn-thesis method for both set-point as well as load changes.
Second-order plus dead time processes are rich in dynamics as they include underdamped, criti-cally damped, and overdamped systems. As in the overdamped systems P1ⰇP2 the corresponding results can be extended to FOPDT also. Hence we choose here the family of SOPDT for study. For the second-order plus dead time共SOPDT兲 process, very few tuning rules are available. Tuning rules are synthesized from ‘‘ultimate cycle data,’’ ‘‘di-rect synthesis,’’ or ‘‘robust controller’’ criteria. Which tuning method to select and what deriva-tive algorithm to use for a SOPDT system are still not very clear. Some of the tuning methods are appropriate for low dead time to time constant ra-tio(D/) while others perform better in highD/
values. Again, there exist different controller tun-ing procedures for underdamped, critically damped, or overdamped SOPDT systems. Hence, to give a clarification in the confusing picture of choosing correct PID controller for a SOPDT pro-cess to achieve better performance, we consider different process models with different D/ ratio and damping coefficient 共兲 values. The tuning methods discussed in this paper are IMC-PID with filter, IMC-Chien关13兴, IMC-Maclaurin 关11兴, Hon-eywell PID关14兴, and PID with desired closed-loop response trajectory 共we call it closed-loop speci-fied PID, in short CS-PID兲. These controllers are of PID1/PID2/PID3 structures and hence can be practically implemented.
In deriving PID controller parameters, the pure time delay is generally approximated as Pade´ se-ries共zero- or first-order approximation兲. The effect of approximating the dead time is realized in
de-teriorating performance. Hence, in this paper, one of the existing tuning rules 共IMC-Maclaurin兲 is used where the time delay term has been expanded by infinite exponential series without truncation and the controller is approximated as a Maclaurin series. This provides a tuning rule with faster re-sponse with less overshoot and which is robust. At the end, the applicability of proper tuning methods for SOPDT process models is suggested.
2. PID Controller
2.1. Process studied
We consider SOPDT processes withD/ values ranging from 0.01 to 10共seven differentD/ val-ues兲 and damping coefficient , ranging from 0.2 to 5.0共nine differentvalues兲. Hence the process has the following structure:
GP共s兲⫽ KPe
⫺Ds
2s2⫹2s⫹1, 共1兲
where KP is the process open-loop gain, is the process time constant,D is the dead time, andis damping coefficient. Thus we have 63 different process models with KP andas unity.
2.2. Tuning methods
We consider five different tuning rules for the PID controller here. Table 1 summarizes the dif-ferent tuning rules adopted in this study. The time-delay component in the closed-loop equation of IMC-PID is approximated using first-order Pade´ or modified Pade´’s approximations. IMC-Chien uses Taylor series approximation for the dead time component. The use of approximating methods deteriorates exact values of the integral time con-stant (I) and derivative time constant (D). Hence this problem can be avoided by expanding time-delay component in an infinite exponential series without truncating the successive terms and by approximating the PID controller in the form of a Maclaurin series.
2.2.1. IMC tuning
With Pade´ approximation, Rivera et al. 关5兴 pro-posed a PID design of IMC strategy which needs selection of the tuning parameter that is almost equivalent to the closed-loop time constant. Mo-rari and Zafiriou 关8兴 proposed the value of as a function of dead time (D) and time constant 共兲 for FOPDT. It is possible to approximate a
Table 2
Modeling—approximated FOPDT关Gm(s)⫽Kme⫺Dms/(ms⫹1)兴 process from SOPDT process.
Parameters Critically damped Overdamped Underdamped
Gain Km⫽Kp Km⫽Kp Km⫽Kp Time constant m⫽1.641 m⫽关0.828⫹0.812共p2/p1兲 ⫹0.172e⫺6.9p2/p1 p1 m⫽2 Dead time Dm⫽0.505⫹D Dm⫽ 1.116p2p1 p1⫹1.208p2⫹D Dm⫽ 2 ⫹D Table 1
Tuning rules investigated. Sl. No. Tuning rule Applicable models
Methods used for approximation of dead time
Type of PID used
1 IMC-PID FOPDT Pade´ series PID-3
2 IMC-Chien SOPDT Taylor series PID-2
3 IMC-Maclaurin SOPDT Maclaurin series expansion PID-2
4 Honeywell SOPDT PID-1
5 Closed-loop SOPDT PID-1 & 3
SOPDT system to a FOPDT process where the approximated process parameters are given in Table 2. Table 3 shows the algorithms to calculate PI or PID3 controller parameters.
2.2.2. IMC-Chien PID tuning
Chien 关13兴 presented a robust PID controller structure for SOPDT processes with the following parameters: KC⫽ 2 KP共⫹D兲, I⫽2, D⫽ 2. 共2兲
For the overdamped SOPDT process the above pa-rameters become KC⫽ P1⫹P2 KP共⫹D兲, I⫽P1⫹P2, D⫽ P1P2 P1⫹P2 共3兲 with ⫽max(0.25D,0.2).
2.2.3. IMC-Mac PID tuning
Maclaurin’s PID controller is based on the result of Lee et al. 关11兴. Morari and Zafiriou 关8兴 pro-posed the IMC controller to be
GC共s兲⫽ 1
共s⫹1兲nG P⫺共s兲
, 共4兲
where GP⫺(s) is the minimum phase part of the process model, is the tuning parameter, andn is chosen such that GC(s) becomes realizable or proper.GC(s)can be expanded in Maclaurin’s se-ries as GC共s兲⫽ f共s兲 s or Table 4
IMC-Maclaurin settings for FOPDT & SOPDT process.
Process Kc I D FOPDT I KP共⫹D兲 ⫹ D2 2共⫹D兲 D2 2共⫹D兲
冉
1⫺ D 3I冊
SOPDT Underdamped I KP共2⫹D兲 2⫺ 22⫺D2 2共2⫹D兲 I⫺2⫹ 2⫺ D 3 6共2⫹D兲 I SOPDT Critically damped I KP共2⫹D兲 2⫺ 22⫺D2 2共2⫹D兲 I⫺2⫹ 2⫺ D 3 6共2⫹D兲 I SOPDT Overdamped I KP共2⫹D兲 共P1⫹P2兲⫺ 22⫺D2 2共2⫹D兲 I⫺共P1⫹P2兲 ⫹ P1P2⫺ D3 6共2⫹D兲 I Tuning parameter ⫽max共0.25D,0.2兲 Table 3Tuning—IMC-PI and IMC-PID control algorithms for FOPDT process. Controller Kc I D PI 2m⫹Dm 2KP m⫹0.5Dm PID 2m⫹Dm 2KP共⫹Dm兲 m⫹0.5Dm mDm 2m⫹Dm Filter lag f⫽ Dm 2共⫹Dm兲
where ⫽max(0.25Dm,0.2m) for PID controller
GC共s兲⫽1 s
冉
f共0兲⫹ f⬘
共0兲s⫹ f⬙
共0兲 2! s 2⫹¯冊
. 共5兲The coefficients ofs0, s1, ands2 in the right-hand side of the above equation 共considering only the first three terms兲 can be equated to a PID control-ler equation, from which one can get PID control parametersKc, I, andD as
KC⫽ f
⬘
共0兲, I⫽ KCf共0兲, D⫽ f
⬙
共0兲2KC . 共6兲
The PID controller parameters and tuning param-eter共兲 are presented in Table 4. The algorithm is implemented on the PID2 structure.
2.2.4. Honeywell PID tuning
Astrom et al. 关14兴 proposed a tuning rule for overdamped SOPDT processes which has an in-dustrial PID structure similar to PID-1. The con-troller parameters are given as follows. For an overdamped process KC⫽ 3 KP
冉
1⫹ 3D P1⫹P2冊
, I⫽P1⫹P2, D⫽ P1P2 P1⫹P2 . 共7兲 A rearrangement onKc gives KC⫽ P1⫹P2 KP冉
P1⫹P2 3 ⫹D冊
. 共7a兲This expression is similar to the IMC-Chien tun-ing except that the filter time constant is fixed to
(p1⫹p2)/3. In the present work, for an under-damped process, p1⫹p2⫽2 and p1p2⫽2 are substituted in the above formula for KC, I,
and D. This tuning rule will be called the Hon-eywell tuning rule here after.
2.2.5. Closed-loop specified PID
The approach of Huang et al. 关12兴, is extended by taking the forward loop transfer function as
GPGC⫽ e⫺Ds 2Ds共␣Ds⫹1兲, 共8兲 Let GP⫽ KPe ⫺Ds 2s2⫹2s⫹1. 共9兲
Then,Gc can be written as
GC共s兲⫽
2s2⫹2s⫹1
2KPDs共␣Ds⫹1兲. 共10兲
Because Gc has a structure similar to PID-3, we obtain the PID controller parameters as
KC⫽ KPD
, I⫽2, D⫽
2, f⫽␣D. 共11兲
In the case of overdamped processes, we have the process transfer function as
GP⫽ KPe ⫺Ds 共P1s⫹1兲共P2s⫹1兲 , P1⬎P2. Then Gc共s兲⫽ P1 2KPD
冉
1⫹ 1 P1s冊冉
P2s⫹1 ␣Ds⫹1冊
.This above equation is similar to the practical PID controller with PID1 form 共Smith and Corripio, 关7兴兲. By comparing, we can get the controller set-tings as
KC⫽ P1
2KPD, I⫽P1, D⫽P2. 共12兲
For critically damped systems we have
GP⫽KPe
⫺Ds
共s⫹1兲2 共13兲
and the controller parameters共PID1 structure兲 be-come
KC⫽ 2KPD
, I⫽, D⫽. 共14兲
2.3. Discussion
If we see all of the above tuning rules, we find that the first three 共IMC-PID, IMC-Chien, and IMC-Mac兲 depend on a tuning parameter . Hon-eywell PID and CSPID have no such parameter but Eqs. 共3兲 and 共7a兲 are of almost similar struc-tures except for⫽(2)/3.In the case of
IMC-Mac PID, a potential problem may arise as there is a possibility ofDbecoming negative due to some values of .
3. Results
3.1. Closed-loop control
Several simulation examples with different SOPDT process models are used to show the per-formances of PID controllers. Closed-loop re-sponses for set-point and load changes are ob-tained. First, we discuss the results with the set-point change. In the entire simulation,␣was taken as 0.1. All the above five tuning methods were used to calculate PID controller parameters.
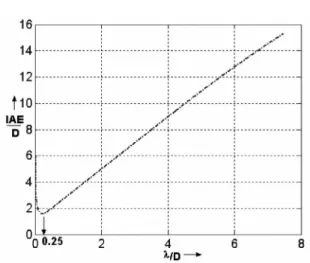
IMC-Fig. 1. Variation of IAE vs /D for a SOPDT process 1.0e⫺3S/(s⫹1)2with the IMC-Maclaurin-PID tuning rule.
Fig. 2. 共a兲 Set-point responses for the SOPDT models using IMC-Maclaurin PID settings 共time in units of D). 共b兲 Set-point responses for the SOPDT models using CS-PID settings共time in units of D). 共c兲 Set-point responses for the SOPDT models using IMC-Chien PID settings共time in units of D).
PID, IMC-Chien, and Maclaurin-PID need to cal-culate the tuning parameter . Fig. 1 shows the optimum value of tuning parameter for IMC-Maclaurin PID. IAE becomes minimum at ⫽0.25D. Each of the process models was con-trolled by different tuning rules for set-point changes. The closed-loop responses with IMC-Maclaurin for all the process models 共with differ-ent D/ and 兲 studied are shown in Fig. 2共a兲. Similar responses for set-point changes obtained with CS-PID and IMC-Chien tuning rules are shown in Figs. 2共b兲 and 2共c兲, respectively. For each model, response (y axis: value range ⫽0 – 2: set point is at 1兲 is plotted against time(x
axis: valuerange⫽0 – 10D). In these figures, the value slowly starts from 0.2 in the left and in-creases to 5.0 horizontally in the extreme right. Similarly, theD/value starts from 0.01 in the top and increases to 10 in the bottom. Similarly, closed-loop responses under load changes with IMC-Mac, CS-PID, and IMC-Chien tuning rules are shown in Figs. 3共a兲, 3共b兲, and 3共c兲, respec-tively.
The integral of absolute error共IAE兲 values were computed in each case. Table 5 shows the normal-ized IAE values for set-point change. The damp-ing factor of a process increases along the column while the D/ ratio increases row wise. The last
Fig. 3.共a兲 Load responses for the SOPDT models using IMC-Maclaurin PID settings 共time in units of D). 共b兲 Load responses for the SOPDT models using CS-PID settings 共time in units of D). 共c兲 Load responses for the SOPDT models using IMC-Chien PID settings共time in units of D).
column indicates five tuning rules against each row. The elements in the table indicate the corre-sponding normalized-IAE values. For each pro-cess model, five IAE values are obtained with five different tuning rules 关with the same tuning pa-rameter ⫽max(0.25D,0.2)] wherever appli-cable, in the present work the value of D differs but ⫽1]. A minimum IAE is sorted out of these five IAE values. Normalized IAE values are cal-culated by dividing the actual IAE by the mini-mum IAE for a particular process. The sum 共for each tuning rule兲 of all these normalized-IAE
val-ues 关also Fig. 4共a兲兴 reveals that IMC-Maclaurin PID and CS-PID tuning rules perform better in overall SOPDT process models compared to IMC-Chien, IMC-PID, and Honeywell PID. Similar ex-ercises, as mentioned above, are performed for the case of load changes 共see Table 6兲. Though the results are similar to that of the set-point change case, the CS-PID tuning rule not only performs better in the region with D/⭐1 but also domi-nates overall, followed by Mac and IMC-Chien.
Table 5
Normalized IAE values (⫽IAE/IAEmin) for set-point changes. U is unstable.
D/ ⫽0.2 0.4 0.6 0.8 1.0 2.0 3.0 4.0 5.0 CONT 0.01 3.5565 3.6049 2.5872 2.2544 3.1764 11.077 20.4169 32.0564 45.2873 IMC-Pid 1.5102 2.4474 2.4291 2.3840 3.6985 11.613 16.1406 19.6576 22.5033 IMCChn 1.0000 1.0000 1.0000 1.0000 1.5569 4.8092 6.5911 7.9864 9.1403 IMCMac 2.0564 1.2628 1.1897 1.2867 2.4771 15.4448 32.115 52.0817 74.4699 Honwel 3.4023 3.0602 2.0958 1.6174 1.0000 1.0000 1.0000 1.0000 1.0000 CS-PID 0.1 2.9622 3.0115 2.3668 2.1099 2.2043 3.9899 5.5603 7.3038 9.1015 IMC-Pid 1.3090 2.0506 2.2022 2.1812 2.4851 4.1183 4.4551 4.6177 4.7126 IMCChn 1.0000 1.0000 1.0000 1.0000 1.1490 1.8997 2.0385 2.1041 2.1439 IMCMac U 1.5326 1.3445 1.3061 1.7314 5.3656 8.5036 11.6114 14.705 Honwel 3.2762 2.8168 2.0839 1.6160 1.0000 1.0000 1.0000 1.0000 1.0000 CS-PID 1 1.3705 1.7965 1.6568 1.5401 1.5262 1.6414 1.7319 1.8576 2.0152 IMC-Pid 1.0000 1.0000 1.0000 1.0000 1.0392 1.2514 1.3237 1.3562 1.3724 IMCChn 9.3349 1.6528 1.2325 1.0573 1.0000 1.0000 1.0000 1.0000 1.0000 IMCMac U U 4.4848 1.5085 1.2083 1.3548 1.8326 2.2939 2.7428 Honwel 1.3729 1.4362 1.4629 1.4732 1.1264 1.2765 1.3398 1.3681 1.3818 CS-PID 3 1.4713 1.7080 1.7827 1.8103 1.8203 1.7810 1.7492 1.7141 1.6977 IMC-Pid 1.1392 1.3080 1.3643 1.3905 1.4054 1.4264 1.4306 1.4328 1.4339 IMCChn 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 IMCMac 173.81 3.2384 1.6859 1.5389 1.4899 1.3785 1.3479 1.3676 1.4248 Honwel 2.6069 1.4930 1.3944 1.6194 1.4032 1.3987 1.3997 1.4004 1.4008 CS-PID 5 1.7912 1.8101 1.8092 1.8039 1.7976 1.7652 1.7546 1.7462 1.7210 IMC-Pid 1.5183 1.5153 1.5069 1.4991 1.4931 1.4838 1.4832 1.4840 1.4851 IMCChn 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 IMCMac 2.0537 1.3851 1.4620 1.5025 1.5131 1.4549 1.3939 1.3612 1.3509 Honwel 3.2862 1.6511 1.4165 1.5767 1.4220 1.3988 1.3964 1.3963 1.3969 CS-PID 7 1.6644 1.7714 1.7694 1.7653 1.7627 1.7442 1.7390 1.7368 1.7357 IMC-Pid 1.4194 1.5008 1.4948 1.4898 1.4861 1.4782 1.4775 1.4785 1.4799 IMCChn 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 IMCMac 1.4680 1.3821 1.4852 1.5274 1.5428 1.5046 1.4440 1.3994 1.3711 Honwel 3.0054 1.6330 1.3890 1.5342 1.4108 1.3935 1.3915 1.3918 1.3927 CS-PID 10 1.6710 1.7223 1.7262 1.7252 1.7234 1.7093 1.7048 1.7035 1.7033 IMC-Pid 1.4411 1.4790 1.4792 1.4768 1.4743 1.4658 1.4632 1.4634 1.4643 IMCChn 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 IMCMac 1.2243 1.4513 1.5315 1.5620 1.5722 1.5399 1.4892 1.4466 1.4123 Honwel 2.9054 1.6173 1.3713 1.5017 1.4034 1.3887 1.3854 1.3851 1.3858 IMC-Pid
According to the performance of the controller, the tuning rules are ranked and are shown in Table 7 共set-point case兲 and Table 8 共load-disturbance case兲. All 63 process models are divided into some
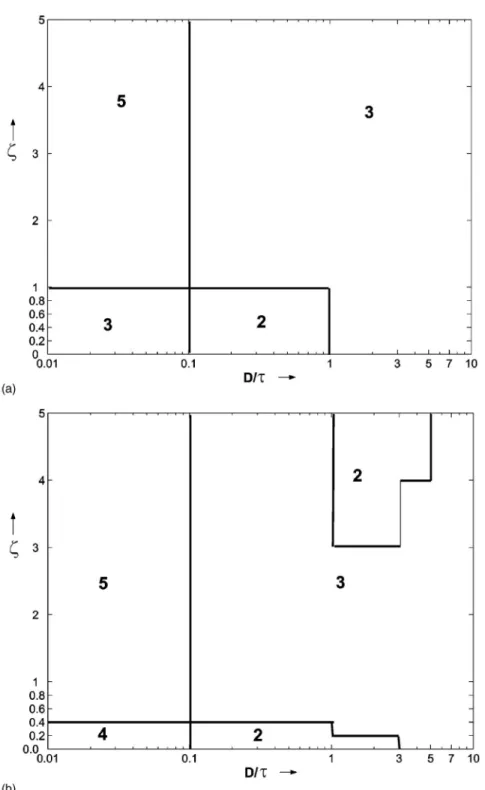
zones like the underdamped zone (⬍1), the overdamped zone(⭓1), or the low dead time to time constant ratio zone (D/⭐1), and the high dead time to time constant ratio zone (D/⬍1). Fig. 4. 共a兲 Demarcation of region for application of different tuning rules 共3 IMC-Maclaurin PID; 2: IMC-Chien; 5: Closed-loop spec. CS-PID兲: set-point case. 共b兲 Approximate demarcation of region for application of different tuning rules 共3: IMC-Maclaurin PID; 2: IMC-Chien; 4: Honeywell tuning rule; 5: Closed-loop spec. CS-PID兲: load-disturbance case.
For a particular zone 共for example, underdamped zone ⬍1), the average IAE is calculated by di-viding the sum of all normalized IAE’s by the number of process models under this zone.
These average IAE’s thus obtained are displayed in Table 7 共set-point case兲 and Table 8 共load-disturbance case兲. This shows the region of appli-cability of different tuning rules in SOPDT pro-cess models. In the case of set-point change, mainly, IMC-Maclaurin and IMC-Chien work bet-ter in the underdamped region while CS-PID and
IMC-Mac tuning can be recommended for over-damped processes. CS-PID and IMC-Mac tuning can be recommended for SOPDT process models with low D/ values while processes with high
D/ need IMC-Maclaurin or IMC-Chien tuning. From Fig. 4共a兲, one can observe the region of suit-ability for different tuning rules. IMC-Maclaurin PID covers most of the significant region in this figure. IMC-Chien tuning can be recommended for underdamped SOPDT process models with moderate D/ values while CS-PID works better
Table 6
Normalized IAE values (⫽IAE/IAEmin) for load changes. U is unstable.
D/ ⫽0.2 0.4 0.6 0.8 1.0 2.0 3.0 4.0 5.0 CONT 0.01 12.6329 12.6635 14.8812 26.3178 16.910 37.490 58.335 78.835 99.1500 IMC-Pid 13.0565 30.9763 53.8168 78.9302 50.500 50.500 50.500 50.500 50.5000 IMCChn 6.1947 15.6137 24.4950 32.6899 20.500 20.500 20.500 20.500 20.5000 IMCMac 1.0000 6.5569 20.2970 42.1163 33.8350 67.165 100.500 133.83 167.155 Honwel 1.1605 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 CS-PID 0.1 2.0032 1.9744 2.0287 3.3553 2.1410 4.1990 6.2835 8.3335 10.3645 IMC-Pid 1.9292 3.8825 5.8497 8.6043 5.5000 5.5000 5.5000 5.5000 5.4995 IMCChn 1.0000 2.1429 2.9560 3.9922 2.5000 2.5000 2.5000 2.5000 2.5000 IMCMac U 1.0000 2.4716 4.9131 3.8335 7.1665 10.5000 13.833 17.1655 Honwel 1.5953 1.1628 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 CS-PID 1 1.2001 1.1980 1.3532 1.2821 1.1098 1.1598 1.4378 1.7111 1.9820 IMC-Pid 1.4719 1.0000 1.2360 1.3364 1.3259 1.3333 1.3333 1.3333 1.3334 IMCChn 8.4914 1.0802 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 IMCMac U U 3.2481 1.3063 1.1099 1.5555 2.0000 2.4445 2.8889 Honwel 1.0000 1.0836 1.2706 1.1343 1.3430 1.3334 1.3333 1.3333 1.3334 CS-PID 3 1.0824 1.4104 1.6190 1.6756 1.6420 1.2307 1.1374 1.1417 1.2433 IMC-Pid 1.0000 1.1830 1.3409 1.3856 1.3610 1.0387 1.0000 1.0000 1.0000 IMCChn 1.2096 1.0000 1.0000 1.0000 1.0000 1.0000 1.1246 1.1250 1.1250 IMCMac U 3.4158 1.6896 1.4862 1.3746 1.0398 1.2496 1.4166 1.5833 Honwel 1.9818 1.2469 1.2906 1.4844 1.4447 1.3349 1.4995 1.4999 1.5000 CS-PID 5 1.8029 1.7865 1.7641 1.7425 1.7161 1.4894 1.2594 1.1760 1.1890 IMC-Pid 1.5735 1.5359 1.5101 1.4871 1.4615 1.2611 1.0646 1.0000 1.0000 IMCChn 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0783 1.1809 IMCMac 2.3368 1.4571 1.4782 1.4825 1.4598 1.2291 1.0657 1.1043 1.3121 Honwel 3.2741 1.6328 1.3933 1.5194 1.4312 1.3934 1.3398 1.4378 1.5745 CS-PID 7 1.4500 1.7514 1.7500 1.7340 1.7186 1.6066 1.4295 1.2691 1.1684 IMC-Pid 1.2550 1.5046 1.4990 1.4837 1.4688 1.3706 1.2159 1.0803 1.0000 IMCChn 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0271 IMCMac 1.8271 1.3913 1.4922 1.5170 1.5131 1.3710 1.1962 1.0812 1.0530 Honwel 2.5921 1.6190 1.3815 1.5061 1.4156 1.4185 1.3798 1.3431 1.3694 CS-PID 10 1.5481 1.6904 1.6897 1.6816 1.6726 1.6143 1.5318 1.4147 1.3044 IMC-Pid 1.3532 1.4749 1.4721 1.4640 1.4554 1.4036 1.3269 1.2218 1.1252 IMCChn 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 IMCMac 1.1959 1.4501 1.5211 1.5441 1.5460 1.4559 1.3338 1.2119 1.1225 Honwel 2.6557 1.6131 1.3672 1.4779 1.4041 1.4075 1.4109 1.3845 1.3580 CS-PID
for overdamped SOPDT systems with low D/
values. Underdamped systems with high D/ val-ues can be better controlled by IMC-Maclaurin PID. The proposed CS-PID tuning rule is suitable for overdamped processes withD/⫽0.1and 1.0. In the case of load disturbance关Fig. 4共b兲兴, it has been found that CS-PID and IMC-Mac PID tuning rules work better in the entire region of SOPDT models compared to IMC-Chien PID.
The IMC-Mac PID tuning rule can be applicable to underdamped or overdamped regions with mod-erate and higher D/ ratio for the load change case. The IMC-Chien tuning rule can be used for either highly underdamped or FOPDT types of processes with moderate D/. In Fig. 4, the re-gions of IMC-Chien and Honeywell PID are somewhat approximate.
3.2. Robustness
The closed-loop log modulus with a PID-2 con-troller using the IMC-Maclaurin tuning rule is
cal-culated and is shown in Fig. 5. Damping coeffi-cients are in the X axis, D/ values are in the Y
axis, and the corresponding log modulus in dB are plotted in theZ axis. The closed-loop log modulus with IMC-Mac PID 共Fig. 5兲 cuts the 2-dB plane and it shows a maximum up to 8 dB for processes with low D/ and with low damping coefficients. The vertical distance between these two planes 共the MAC-PID plane and the 2-dB plane兲 repre-sents the measure of actual robustness of the cor-responding controller.
3.3. PID vs PI
The closed-loop performance of a process can generally be improved by the use of PID controller over PI controller. The minimum value of is found from the graph of IAE/D vs /D for a particular process using IMC-Mac tuning rule. The optimum tuning parameter (o pt) values for PID as well as PI are found for each of the SOPDT process models. With these o pt the ratio
Table 7
Ranking of tuning rules共set-point changes兲. Average IAE⫽(total cumulative normalized IAE)/(number of process).
Tuning rule
Normalized共IAE兲 for
Average IAE Ranking ⬍1 ⭓1 D/⭐1 D/⬎1 ⬍1 ⭓1 D/⭐1 D/⬎1 Over all IMC-PID 2.0221 5.2502 8.4649 1.7392 3.8155 4 4 4 4 4 IMC-Chien 1.5549 3.7039 5.7552 1.4531 2.7488 2 3 3 2 3 IMC-Maclaurin 1.3313 1.8405 3.1284 1.0 1.6142 1 2 2 1 2 Honeywell 33.255 ⫹4U 7.3355 45.7512 ⫹3U 6.3088 ⫹U 18.8554 ⫹4U 5 5 5 5 5 Closed-loop Spec. PID 1.9898 1.2696 2.0098 1.6095 1.5897 3 1 1 3 1 Table 8
Ranking of tuning rules共load changes兲. Average IAE⫽(total cumulative normalized IAE)/(number of process).
Tuning rule
Normalized共IAE兲 for
Average IAE Ranking ⬍1 ⭓1 D/⭐1 D/⬎1 ⬍1 ⭓1 D/⭐1 D/⬎1 Over all IMC-PID 3.8239 10.211 19.5396 1.5037 7.3725 2 4 3 3 3 IMC-Chien 8.0219 8.8718 23.2737 1.2883 8.4941 4 3 4 2 4 IMC-Maclaurin 4.1738 4.0189 10.5074 1.0242 4.0877 3 2 2 1 2 Honeywell 59.428
⫹4U 16.877 98.6375⫹3U 5.0921⫹U 33.7889⫹4U 5 5 5 5 5
Closed-loop Spec. PID
between IAEPID and IAEPI are found. Thus-obtained IAE ratios are shown in Table 9. It can be seen from the table that the margin of improve-ment of PID controller decreases with the increase of D/. The results are consistent with all differ-ent damping coefficidiffer-ents as shown in Table 9. The processes in the last column resemble FOPDT sys-tems where we find an improvement of ⬃30% in IAE with PID controller over PI.
4. Conclusion
In this study, five existing PID-controller tuning rules are studied along with a new tuning rule based on closed-loop trajectory specification of
GPGC⫽e⫺Ds/2Ds(␣Ds⫹1) for finding the ap-propriate tuning rule for SOPDT systems. Four tuning rules are based on the IMC design where the controller (Gc) is found from the process model(GP). Three of them are based on the Tay-lor’s series expansions for the dead time and IMC-Maclaurin is based on the IMC-Maclaurin series ap-proximation on the whole controller. These tuning rules are used to tune controller parameters of an industrial PID controller implemented in a closed-loop structure with SOPDT models. Performance study reveals the following:
共i兲 For a process with high D/ ratio (D/ ⬎1): use IMC-Maclaurin settings for both set-point and load changes.
Fig. 5. Closed-loop log modulus of SOPDT processes with IMC-Maclaurin PID tuning rule共compared with 2-dB plane兲.
Table 9
Values of ratio of IAEPID/IAEPIfor IMC-Mac tuning rule.
D/ 0.2 0.4 0.6 0.8 1.0 2.0 3.0 4.0 5.0 0.01 0.0438 0.0796 0.1107 0.1461 0.1934 0.3921 0.5225 0.6118 0.6743 0.1 0.1014 0.1717 0.2253 0.2750 0.3244 0.5070 0.6114 0.6774 0.7225 1.0 0.6544 0.9016 0.7948 0.7491 0.7155 0.6859 0.6835 0.6866 0.6905 3.0 0.9547 0.8501 0.8063 0.7787 0.7587 0.7140 0.6940 0.6837 0.6778 5.0 0.8603 0.8473 0.8187 0.7997 0.7861 0.7393 0.7144 0.6990 0.6885 7.0 0.9636 0.9144 0.8522 0.8193 0.8029 0.7576 0.7313 0.7139 0.7017 10.0 1.0284 0.9671 0.9125 0.8677 0.8363 0.7779 0.7516 0.7335 0.7199
共ii兲 For a process with low D/ ratio (D/ ⭐1): use CS-PID tuning for both set-point and load changes.
共iii兲 For overall SOPDT process models when considering both set-point and load changes, use CS-PID settings.
The comparison between PI and PID controllers is also investigated. The results show that much im-proved performance can be achieved using a PID controller共over a PI one兲 for systems with smaller
D/ ratio共Table 9兲. Acknowledgment
This work was supported by the National Sci-ence Council of Taiwan.
References
关1兴 Ziegler, J.G. and Nichols, N.B., Optimum settings for
automatic controllers. Trans. ASME 64, 759–768
共1942兲.
关2兴 Astrom, K.J. and Hagglund, T., PID Controllers:
Theory Design and Tuning, 2nd ed. Instrument Soci-ety of America, Research Triangle Park, NC, 1995.
关3兴 Cohen, G.H. and Coon, G.A., Theoretical
consider-ations of retarded control. Trans. ASME 75, 827– 834
共1953兲.
关4兴 Tyreus, B.D. and Luyben, W.L., Tuning PI controllers
for integrator/dead-time process. Ind. Eng. Chem. Res.
31, 2625–2628共1992兲.
关5兴 Rivera, D.E., Morari, M., and Skogestad, S., Internal
model control. 4. PID controller design. Ind. Eng. Chem. Process Des. Dev. 25, 252–265共1986兲.
关6兴 Zhuang, M. and Artherton, D.P., Automatic tuning of
optimum PID controllers. IEE Proc.-D: Control Theory Appl. 140, 216 –224共1993兲.
关7兴 Smith, C.A. and Corripio, A.B., Principles and
Prac-tice of Automatic Process Control, 2nd ed. John Wiley and Sons, New York, 1997.
关8兴 Morari, M. and Zafiriou, E., Robust Process Control.
Prentice-Hall, Englewood CLiffs, NJ, 1989.
关9兴 Luyben, W.L., Effect of derivative algorithm and
tun-ing selection on the PID control of dead-time pro-cesses. Ind. Eng. Chem. Res. 40, 3605–3611共2001兲.
关10兴 Chen, D. and Seborg, D.E., PI/PID controller design
based on direct synthesis and disturbance rejection. Ind. Eng. Chem. Res. 41, 4807– 4822共2002兲.
关11兴 Lee, Y., Park, S., Lee, M., and Brosilow, C., PID
con-troller tuning for desired closed-loop responses for SI/SO systems. AIChE J. 44, 106 –115共1998兲.
关12兴 Huang, H.P., Lee, M.W., and Chen, C.L., Inverse
based design for a modified PID controller. J. Chin. Inst. Chem. Eng. 31, 225–236共2000兲.
关13兴 Chien, I.-L., IMC-PID controller design—An
exten-sion. Proceedings of the IFAC adaptive control of
chemical processes conference, Copenhagen, Den-mark, 1988, pp. 147–152.
关14兴 Astrom, K.J., Hagglund, T., Hang, C.C., and Ho,
W.K., Automatic tuning and adaptation for PID controllers-a survey. Control Eng. Pract. 1, 699–714
共1993兲.
Rames C. Panda received the
M.Tech. and Ph.D. degrees in chemical engineering in 1989 and 1994, respectively, from the Indian Institute of Technol-ogy, Madras. In 1993, he joined Chemical Engg. Dept. of CLRI共Council of Scientific & Industrial Research兲 as a scientist. He looks after indus-trial instrumentation and pro-cess control related works. He has carried out research works at University of Karlsruhe 共TH兲, Germany in 1997–8. Presently, he is working as a visiting fel-low at PSE, Chem. Engg. Dept., NTU, Taipei. His research area in-cludes autotuning, PID controllers and analysis of control systems, process modeling, and simulation.
Cheng-Ching Yu received the
B.S. degree from Tunghai Uni-versity, Taichung, Taiwan, in 1979 and the M.S. and Ph.D. degrees from Lehigh Univer-sity in 1982 and 1986, respec-tively, all in chemical engi-neering. Since 1986, he has been with the National Taiwan University of Sci. and Technol. for 16 years, currently he is a professor of chemical engi-neering at National Taiwan University. His research inter-ests include multivariable control, plantwide control, control of micro-electronic processes, and design and control of reactive distillation. He published over 70 journal papers and he is the author of Autotuning of PID Controllers共Springer-Verlag, 1999兲.
Hsiao-Ping Huang received
B.Sc., M.Sc., and Ph.D. de-grees in chemical engineering in 1967, 1969, and 1976, re-spectively, all from the Na-tional Taiwan University 共NTU兲. He joined the depart-ment of chemical engineering at the NTU in 1970 as a lec-turer, then as an associate pro-fessor in 1976, and as a full professor since 1981. He was the head of the department 共1986–1992兲, the editor-in-chief of the journal of Chinese Institute of Chemical Engineers共1986– 1992兲, and the program director of chemical engineering research, the Engineering Division of National Science Council共1996–2000兲. His research interests are general within the areas of systems identification and process control.