師大學報.數理與科技類 民國 91 年.47(2) . 1-26
高速公路上鄰近移動車輛之動向偵測
陳佳珮 l
方瓊瑤 2
陳世旺 l
國立台灣師範大學資訊工程所 l 國立台灣師範大學資訊教育學率 2 本篇主要為應用影像技術在偵測在高速公路上鄰近車輛的動向。系統主要分為三個部份:感覺分析器 (sensory analyzer 卜知覺分析器 (perceptual analyzer) 與概念分析器
(conceptual
analyzer) 。感覺分析器可找出影像中移動的物體,主要為鄰近的車輛;知覺分析器則是利用 STA
(spatial-temporal
attention)類神經網路模組繪出移動的鄰近車輛之移動 方向,也就是注意力圖像 (attentionmaps)
,並將所得到的注意力圖像分割為五個視窗,以便偵測到不同位置的障礙物;概念分析器則是針對各個視窗分別利用 CART
(configurable
adaptive resonance
theory) 類神經網路來做分類。最後利用決策產生器模組中的模糊理論整合各個 CART 顯神經網路的分類以輸出分類結果。在實驗結果中,我們提出數個例子以 驗證我們的方法。 關鍵字:動向偵測車輛偵測模糊整合
研究背景與目的
近年來由於車輛數目急速增多以及隨著車輛性 能的提升,平均車速也較以往提高許多,駕駛安全問 題也因此變得日益重要。駕駛安全輔助系統(Driving
Assistant
System) 目的即在增進駕駛人的安全(safety) 、舒適 (comfort )與效率(
efficiency
)。本 研究著重在安全方面的考量,其相關技術大略分為被 動 (passive) 與主動(active
)型。被動型技術為要 在車禍發生時盡量降低人員受傷害的程度,如安全氣 囊 (air bag) 、安全帶 (seatbelt)
,防鎖死煞車系統 (ABS) 等裝置;主動型技術則重在事先預防車禍的發生[Naa94,
Rei95
,
SchOO
,
Ven9月,駕駛安全輔助系統
即屬於主動型的一種設計。
一般而言,駕駛安全輔助系統在有關安全方面的 子系統包括有:障礙物偵測(
obstacle
detection) 系統,交通標誌偵測 (traffic
sign
detection) 系統,以及 道路偵測 (lane detection) 系統,其中又以障礙物 偵測最為重要。由於障礙物的種類繁多,本文將只考 慮高速公路上所可能出現的障礙物。首先我們將此類 障礙物分為靜態與動態兩種。靜態障礙物指的是針對 道路靜止的物體(如園一所示) ,包括:車輛故障用 三角架、道路施工用之三角錐與路障,以及停在路肩 上的故障車輛或工程車等。而動態障礙物主要指的是 行進中的車輛(如圖二所示) ,其中包括前方車輛加 速或減速,鄰近車輛變換車道,以及不同車道上車輛 的超車等。此外施工或清潔人員也都是屬於動態障礙 物的種類。由於動態障礙物本身可以任意移動,不容 易預測它們行動的方向,因此動態障礙物比靜態障礙 物來得較難掌控。2 陳佳珮方瓊瑤陳世 E王
(a)
.. '', LU 、‘,', 、、(c)
圖一高速公路上之靜態障礙物: (a) 施工用之三角錐, (b) 施工用之路障, (c) 停在路 肩之車輛。(a)
JS﹒、 LU 、‘自', 圖二 高速公路上之動態障礙物: (a) 小於安全距離之前方車輛, (b) 其他車道中欲切換 車道至前方車道之車輛。 障礙物不見得都具有安全上的威脅。舉例來說(1)前方車輛減速。 在我方車輛前面的車輛若加速駛離或變換到其他車 (2)前方車輛等速或減速向左變換車道。 道,貝IJ反而增加了我方車輛的安全性。然而若是前方 (3)前方車輛等速或減速向右變換車道。 車輛減速或緊急煞車,或是有其他車輛突然跨越我方(4
)右方車道之車輛等速或減速向左變換車道。 車道,這些情況都對行車安全可能造成威脅。又由於 (5)左方車道之車輛等速或減速向右變換車道。 行駛於高速公路上的車輛其車速都相當快,一旦發生 (6)左方或右方車道之車輛加速經過我車。 擦撞,後果都相當嚴重,因此本文將著重在真有危險 (7)左方或右方車道之車輛減速接近我車。 性動作車輛的偵測,希望能適時警告駕駛者的注意, 另外本車向左或向右變換車道,亦屬於危險性動 以增加行車安全。 向之車輛。 至於施工或清潔人員因屬於臨時性的工作,且在 此外若有多部車輛同時在鄰近行駛時,則上述的 施工或清潔時都會設置一些較醒目的警告標誌來保 事件可能會同時發生。例如:前方車輛向右變換車道 護相關人員的安全。因此本文暫時不考慮他們。至於 時,左方車道之車輛亦向右變換車道;前方車輛減速 相對於我方車輛之鄰近車輛的危險性動向,可以分為 時,右邊車道之車輛卻加速行駛等。這些都會使得偵 下列幾項: 測鄰近行駛中車輛的動向變得相當困難 o高速公路土鄰近移動車輛之動向偵測 3 另外,環境及天候因素亦會影響到車輛動向之偵測。 系統較難處理的時候。如何克服外界環境天候的不良 通常在夜間或天候不佳的情況下,反而是駕駛者最需 影響,使得駕駛安全輔助系統能夠發揮應有的功能, 要駕駛安全輔助系統的時候,然而這些通常也是視覺 也是我們研究極需努力的目標。
研究方法與步驟
雖然電腦在處理數據與邏輯運算方面的速度都 比人類都要來的快速,但是在偵測 (detection) 與辨 識(recognition
)方面的能力卻遠不如人類。本研究 希望能建構一套以視覺技術為基礎的鄰近車輛危險 動向之偵測系統,此系統模擬人類視覺認知過程中的 三種分析器:感覺分析器(sensory
analyzer) 、知覺分析器 (perceptual analyzer) 、與概念分析器(
conceptual
analyzer) [8
,
9] 。以下我們先對整個系統作一概述,
然後再詳述各個分析器。
一、系統架構
當外界影像進入障礙物偵測系統時,彷彿是外界 刺激進入人類的視覺系統,這些刺激包括空間資訊
(spatial
information) 與時間資訊(temporal
information) 。這兩大類資訊會不斷的刺激分佈在短期 記憶體 (short-term
memory
)中的神經元。當刺激持 續一段時間後,若短期記憶體中的神經元處於中、低 激起狀態,買 IJ 系統會持續等待下一刻的刺激;否則, 若短期記憶體中的神經元處於高激起狀態,則會形成 注意焦點 (focusof
attention) 。也就是說,當行車環 境無太大變化時,並不會引起系統的注意。然而當行 車環境中有較大且持續性的變化時,如:與前方車輛 距離越來越近時,便會引起系統的注意,並產生注意 焦點。在障礙物偵測系統中,注意焦點的位置極有可 能就是障礙物出現的位置 o 有關注意焦點的產生過 程,我們將以STA (spatial-temporal
胡ention) 類神 經網路來模擬。由於不同的鄰近車輛之危險動向具有 不同的注意焦點,因此我們便利用注意焦點的漸層位 置與方向來作為所要擷取的特徵。首先先將 attention maps 分割成五個視窗,每個視窗皆利用不同的 ART2 類神經網路來作分類。最後再利用 fuzzydecision
making 來整合五種 ART2 類神經網路的分類結果。圖 三為本系統之流程圖。4 陳佳珮方瓊瑤陳世旺 Video images Sensory component
bOEO-A
Data transduction Information acquisition Spatialtemporal informationSTA neural module Perceptual
No
component U呵咕。的咱們問凶
Action 圖三 高速公路上鄰近車輛動向偵測系統之流程圖二、感覺分析器 (sens。可 analyzer)
由於障礙物本身色彩變化較多樣化,它們的形狀 也不固定,再加上還有自主運動的能力,也就不能預 測它們可能發生的位置,因此在感覺分析器中的特徵 擷取就有相當程度的困難。但由於本研究將動態障礙 物鎖定在「同方向車道上鄰近的行進車輛 J '在特徵 擷取時以「車輛」與「動向」為主要考慮的目標。而 感覺分析器即是在找出移動的物體,再利用紅色車尾 燈作為判斷是否為車輛的依據。 圖四為感覺分析器的流程圖。假設由架在車上的 攝影機所拍得的彩色連續影像為 s ,令 l(t) 表為 S 中高速公路上鄰近移動車輛之動向偵測 5 的第 t 張輸入影像。系統首先將 1(t) down-sample 成 原來的四分之一,這個步驟可以減少影像處理時間, 同時也可以過濾掉部分雜訊。令 l' (t) 為此 down-sampled 後的影像 'D 表該影像的 2 維陣子IJ 。 假設 R' (t) 、 σ (t) 、 B'(t) 表影像l'的之紅、藍、綠
三個色彩分量,即 I' (t)
=
(R'(t)
,
G'(t)
, B'(t)) 。定義
low-color image '
L(t)
=
(R
l(t),
G
l(t)
,
B
l(t))
, 其可
以經由以下運算獲得。對於每一個像點 (i,j)
,
(i, j) εD'
RJJ)=min{RCJ), RJl) 。一 1月,
GJtj)(t)=min{GJZj)(t), GJj) 。一 1)}
,
B{"j)
(肛 min{Birl)(t), BJj) 。 -1)} 。
同理,high-color image'
H
(t)=
(R
h(t)
,
G
h(t)
,
B
h(t))
, 也可以經由以下運算獲得:
R(~,j)
(t)
= max
{R;i
,
j)
(t), 則 j) 。一 1月,
G;J)=max{Gjtj)(t), GJL)(t-1月,
再 j)
(t)
=
max{B;i
,
j)
(t), 可 j)(t-1)} 。
初始時 ,
L(O)=
I'
(O)=H(O)
0E(/ j)(t) 表示彩
色影像 H(.卅日 L(t) 的紅、藍、綠三個色彩分量中色
彩差異度最大者,可由下列公式求出:E(i,
j)
(市 m叫必(i, j)
(t)
, !1
G
{i,
j)
(t), 峙i, j)(t)}
'(1)
其中必(i,j)
(t)
=
IR(~,j) 的一 R{"j)
(t)
1 '“ο j)(t) = 叫 j)
(t) - Gt/
,j)
(t)
1 '在B(/j)
(t)
=
IB(~,j) (t) 一 B{i,j) (t)1 。
我們以 h(t) 表影像l'的之色度 (hue) 值。假設 障礙物在影像中的可能色度值之集合為統,丸,...,
h
q}, 則我們可以用下列的函數來定義影
像中某一點的色度值隸屬於障礙物的可能性:。(i, j)
月it(OK) ,
(2)
主主由。
2
-1
'TVk 一 1
+
e
-Ih(i,j)-hkl此時,
spatial difference image
D(t)
, 可由下列式
子導出:
D(/j)(t)
=
(1 一 α)丸, j)
(t)
+ αO{i, j)
,
forall
(i, j) εD'
(3)
其中 α 為權重常數,調整右式中前後二項的比重;而九)(肛 4 三的一 1 。
l+e 、, 上述(1)的式子可以強化色彩的差異。舉個例子來說,假設 (R(~, j)
(t)
,
G(~, j)
(t)
,
B(~,j)
(t))
=
(2咒 255, 25叮5)
(白色)卜、 (RfiιJ
仆j)(t
(
黃色 )μ, 貝閉則IJ E(i札圳
1人川,jρ) (οt)
=
max{M(ο/, jρ)
(t)
,
!1G(ο札
(/, j
人川,jρ)
(t)
,
血B(ο/,川,jρ) (的
t)}=刁25叮5 。如此一來,就很容易分辨出白色與
黃色障礙物之間的差異。 另一方面,由 (2)這個式子可以看出愈可能代表障 礙物色彩的像點的 O(i, j) 值愈小。不過要界定那些是 障礙物的顏色其實是非常困難的,但是經由觀察的結 果,我們認為車尾燈的顏色最具有代表性。因為不論 是何種顏色的車輛,幾乎都具備紅色或橙黃色的尾 燈,這是一個非常重要的特徵。國五中顯示此一特徵 擷取出的結果,圖五個)為輸入的原始影像,圖五 (b) 則呈現色度隸屬影像。(i, j) 將圖中的亮點部份與原 始影像對照,可以看出它們幾乎都位於車尾燈的位 置。當然,與尾燈顏色相近的區域也會被擷取出來, 但利用車尾燈成對且大小幾乎一致的特性,我們可以 在必要時將顏色相近的車輛所造成的干擾順利排 除。6
D(t)
D
(t
-l)
F車佳珮方瓊瑤陳世旺Video sequence S
|1m的
Subsampling
Spatial image difference
D(t)
Temporal image difference
圖四 感覺分析器的特徵擷取流程圖。
Hue-component extraction
Obsta
c1e-color
measurement
(吋 (b)圖五車燈特徵的擷取: (a) 輸入的原始影像, (b) 色度隸屬影像。(i ,j) 。
高速公路土鄰近移動車輛之動向偵測 7
求出 D(t) 之後,我們還需計算出衍生影像
(temporal difference images)
D'
(t)
D;j
,j)(t)
=
I伊
Dμω
川
(i,j) (
力瓜
J
洲)丹舟州
(t約t)卜一 Dμω
川川
jρ泌)(t卜一叫
for all
(i,
ρ)εD 。j此時,一旦影像中有障礙物移動,便會在影像 D' 的中出現移動的路徑記錄。影像 D'(t) 因此保留 了移動物體的空間和時間資訊。 圖六顯示上述各個影像處理步驟所產生的結果。圖 六(a)中所示為攝影機所拍得影像序列的部份影像,順 序從上到下。圖六(b)和(c)分別代表 high-intensity 影 像 H(t) 與 low-intensity 影像 L(t) 。這兩行中每一列 對應的影像的 RGB 值兩兩相減取最大值再加上色度
屬露
矗露
麗麗鑫
鐘矗鑫
(a)
隸屬值便可得到圖六 (d句)的差值影像 D(ωt) 。在圖六(仰b)油hig偵hιh-in叫ntensity 影(像象 H(約t) 中,可以觀察到影像中地 面上的標線及車輛附近的線條越來越粗,且最後幾乎 固定同一寬度,這是分別是因為車子在行駛中晃動的 震幅在某一範圍內及拍攝時手晃動的緣故。在圖六(d) 的差值影像 D (t) 中,我們可以發現有些部分為較亮 的區域,這些區域的產生是由相對於觀察者而言的靜 止物體。如果駕駛環境中沒有重大的改變(除了攝影 機的晃動) ,則這些區域最後會隨著時間群眾在一 起。圖六 (e)為衍生影像 D' 的。我們可以發現衍生影 像中的較亮的區域漸漸變少,那是因為駕駛環境中並 無太大的改變所造成。 內W
tI
(c)
(d)
(e)
圖六感覺分析特徵擷取之範例: (a) 影像序列的部分影像,(b)
high-intensity 影像H
(t)
,
(C)
low-intensity 影像 L (t) , 的)差值影像 D(t),
(e) 衍生影像 D' 的。8 F車佳珮方瓊J& 陳世旺
三、知覺分析器 (perceptual analyzer)
由感覺分析器所得到的結果,將會傳送至知覺分 析器。而知覺分析器主要有兩個模組,一為 STA( spatial-temporal
attention) 類神經網路模組,另一個 為類別特徵萃取模組。以下先介紹如何利用 STA 類 神經網路來模擬注意焦點集中的過程,並用來偵測障 礙物的動向。之後再討論類別特徵的擷取方式。(一)
STA
(spatial-temporal
attention)類神經網路
模組
STA 類神經網路分為兩個階層 (Iayers) ,一為輸
Inhibitory
connec
t1on
Excitatory
入層(
input layer)
,另一為輸出層(output layer)
,亦 稱為 attentionlayer
。圖七為 STA 類神經架構圖。輸 出層中的每個神經元都與其鄰近的神經元有連接,此 種連結稱之為階層內部連結(within-Iayer
connections)
,主要用來傳遞抑制訊息。輸入層內的 神經元彼此之間並無連結存在,然而輸入層的每個神 經元與輸出層的輸出層的每個神經元皆有連結存 在,且為完全連結(full-connected)
,此種連結為階 層間連結 (between-layerconnections)
,主要用來傳遞 激發訊息。 、‘,/ V 且 r且戶 ivevd
叮
-Mln
Mo
pu
4E 包 VEA UEon
A
JS. 、 團七 STA 類神經網路架構圖。 輸入層與輸出層的神經元皆是以 2D 陣列形式組 織在一起。而陣列的大小即為輸入影像的大小。令 wυ 代表輸出層神經元 ni
與輸入層神經元
nj
之間連結權 重 (Iinking weight) 。對輸出層神經元代而言,其權重向量為 W
i=
(W
il,
W'2'0 0 0'
Wim ), 其中 m 為輸入層
的神經元個數。當輸入一刺激源 X '對輸出層神經元 n, 而言,其所收到來自輸入層神經元之訊息可寫成I叮v =W
叭iOX=LW
門fυ川
1
輸入層與輸出層間的連結權重之給定方式,如圖八所示。 nJ 為輸入層中之神經元,而 n
i
為其所對應之 輸出層神經元。假設2D Gaussian 函數 G 的中心落在高速公路上鄰近移動車輛之動向偵測 9
輸出層 n, 上,買IJ輸入層 n
j
與輸出層nk
之間的連結權 經元代的位置向量 (position
vector) 。重 W句為 w句=
G(rkJ
'其中 r
ki
為神經元
n
k
相對於神Gaussian function G
Input neuron
Attention
layer
圖八輸入層與輸出層的連結權章。 在競爭學習時,輸出層的神經元會互相抑制,而 這種抑制的機制可以用“墨西哥帽 (Mexican-hat) "函 數來模擬,以 M(r) 表示,其中 r 為距離函數中心的 位置向量,如圖九所示。也就是說,當一輸出層神經 元被激發峙,在此神經元鄰近小範圍的神經元也都會 被激發,但是超過某一段距離的神經元則會受到抑 制,之後再隔一段距離的神經元又會受到激發的影 響。通常“墨西哥帽(Mexican-hat)
"函數會利用Laplacian ofGaussian (LOG)
V
2G(r) 或 difference
of
Gaussian (DOG) G} (r) - G
2 (r) 等函數來近似。則 輸出層神經元代所收到來自同層神經元之訊息為1:
=
L:
JUikM(rk -r
,
)ak ]
(5)
kε N_k 可., 其中 Ni
代表輸出層神經元代之鄰近神經元集合;如 為神經元n
i
與神經元 n
k
之間的連結強度,其位置向 量分別為 r,與 rk
;向 =If/(netk
) 代表輸出層神經元 代的激發值(activation)
,其中If/(﹒)為轉換函數( transfer function)
,通常用 sigmoid function 來模擬,以下兩種方程式均可使用。
Fermi
function: 圳特
1
以及
1
+
exp(一λx)G
附 f伽恤m肌ction: 仰AU
l
陳佳珮方瓊瑤陳世旺
Late ral Inte racti
0n
r
Distance
圖九墨西哥帽 (Mexican-hat) 函數。 輸出層神經元代的淨輸入值之定義如下:net;
=
a
,
+
A(一ba,
+
cB
(I
;v+
1: -
r))
,
(6)
其中 b 與 c 為正值的常數 ;b 代表激發值。t 的衰 減速率,而 C 代表從輸入層神經元及神經元抖的鄰近 神經元所得到的總輸入之權重。門檻值 (t尬的hold)r
可以過濾掉雜訊的干擾。函數民x) 與 A(x) 定義如下[6] :
I
x
if x
>
0
B(x)
=
~
10
if
x 三 O(7)
X'的
rtBB ﹒',〈、 EBEEt 、 一一 、‘,/ XA
if x
>
0
if x
~三 0'
(8)
其中 1>d
>
0 。圖十說明輸入刺激源後,輸出層神 經元激發值的活動情形。如果淨輸入值在 M 時間內 超過門檻值 r ,貝 IJ 需要花 l/b 時間來達到最高激發 值,且在沒有其他刺激輸入的情況下衰減約需 l/bd 時間。因為 d<1
'所以衰滅的時間會比上升的時間 要來得久。stimulus
ac
t1
vat
lOn
t
←--1:1/ 一→|
|+24H
bd
....-,
圖十 輸入刺激源後,輸出層神經元激發值的活動情形。高速公路上鄰近移動車輛之動向偵測 11 假設某一點刺激了輸入層的神經元,接下來它便 會影響到輸出層的神經元。每個輸出層的神經元受影 響的程度並不相同,是由 Gaussian 函數來控制(如 圖八) 0 Gaussian 函數可以使得某個輸入神經元的刺 激在輸入後會刺激到輸出層對應神經元附近的神經 元,產生刺激分散(
spreading
)的現象。因為輸出層 神經元之間的相互抑制情形是由“墨西哥帽"函數所 控制,所以輸出層的神經元會產生激發狀態聚集的現 象。在 STA 類神經網路中的分散(spreading
)與聚集( clustering
)機制,分別如型態學(morphological )
中的擴張 (dilation) 與侵蝕( erosion) 運算。這兩種 機制的整合,增加了系統容忍輸入資料的不完整之能 力。 參考圖七,假定一個移動點的在時間 t 時刺激輸 出層神經元爪,在時間 1+1 時刺激它鄰近的神經元 叫。假設輸出層神經元 n; 在時間 t 時的激發值為 。;(t)=
0 。從式 (4)至 (6) ,神經元的輸入值中,來自 於點刺激與同一層間神經元的影響分別為I;V (/)
(>
r)與 1:
(/)(=
0)
,輸入層神經元抖的淨輸
入值為 net;
(t)
=
c
(I
;v(t) -
r)
,激發值則為
α;(t)=
Ij/ (net;(t)) 。此時,輸出層神經元門的激發 值 Qk (t) 仍然為零。若在時間 1+
1 時刺激點移動到輸 出層神經元叫,這時輸出層神經元 nk
開始上升,而 輸出層神經元 n; 的激發值則開始衰減。因為神經元的 衰減速率比上升速率來得小,所以一旦刺激持續移 動,便會在 attention layer 中留下移動的軌跡。這軌跡 保留了刺激點在時間和空間方面的訊息。 總而言之,如果環境中無任何改變的話,衍生影 像中只包含一些小的 entri白,這並不會激發在 STA 類 神經網路中的輸出層神經元(參考式 (6) 中的門檻值 r) 。但是,如果在衍生影像中包含許多的 entn白, 則會在輸出層神經元上產生激發樣式。激發樣式會與 環境中的改變同步發展,然後達到最大值,在類神經 網路的輸出層上形成注意焦點。 圖十一為前方車輛欲變換車道至右方車道。圖中包 含輸入的序列影像與其相關的注意力圖像(attention
maps) 。注意力圖像即為 STA 類神經網路中 attention layer 的輸出。在注意力圖像中,可以發現當右邊車輛 在變換車道時,漸漸形成某種樣式 (pattem) ,當它 足夠明顯時,就形成注意焦點。注意力圖像也提供了 我們障礙物的位置與大小的訊息。 圖十一知覺分析中 STA 類神經網路模組之輸出範例。 (司類別特徵的擷取 針對具有危險動作的鄰近車輛或本車輛所可能 產生的注意力圖像,我們將其歸類為十七種類別如圖 十二所示。
12 陳 f圭珮 方正皇If, f車世旺 (a) 前車減速接近本車 (b) 前車切換至右方車道 (c) 前車切換至左方車道 (d) 右方車道之前車切換至本車道前方 (e) 左方車道之前車切換至本車道前方 的前車切換至右方車道,並接近本車 (g) 前車切換至左方車道,並接近本車 (h) 右方車道之前車切換至本車道,並接近本車
(i)
左方車道之前車切換至本車道,並接近本車 ω 本車向右切換車道開始 (k) 本車向左切換車道開始高速公路土鄰近移動車輛之動向偵測 13
(1)
本車向左切換車道結束 (m) 本車向右切換車道結束 (n) 左方車道車輛減速 (0) 右方車道車輛減速 (p) 左方車道車輛加速 (q) 右方車道車輛加速 圖十二 單一鄰近車輛動向分析之注意力圖像。 由於障礙物在運動時,不一定是等速或等加速, 因此在類別特徵的擷取時最好能夠擷取出這些注意 力圖像定性的特徵'作為概念分析時分類的參考。圖 十二中可以看到亮點漸層的分佈是偵測障礙物動向 的主要特徵。亮點分布的位置代表障礙物的位置;亮 點分布的漸層方向代表障礙物移動的方向。 在實際的狀況下可能同時有多個障礙物在我車附 近移動,因此容易導致多種危險狀況的發生。例如當 前車切換至左方車道,並接近本車的同時,右方車道 又跨越車道至我車道前方且接近本車。因此在做定性 特徵之擷取時需考慮這些可能的情況。定性特徵之擷 取與辨識流程圖如圖十三所示。我們將所得到的注意 力圖像分割成五個視窗,分別以 W} 、 W2
、 W3
、 W4
及
W
s
代表第一個、第三個、第三個、第四個及第五 個視窗所切割出的影像。如此一來,如果同時發生多 種狀況,我們依然可以利用不同視窗來辨識多種障礙 物動向類別。再加上有些狀況只會固定發生在某些位 置,因此希望藉由不同視窗來判斷不同情況。之所以 切成五個視窗,是根據本系統應用的需求。由於視窗1
與視窗3
涵蓋的範圍主要是車道的盡頭,與駕駛者的 距離較遠,所造成的威脅也就比較少。視窗2
與視窗4
分別偵測左方車道與右方車道的車輛。這兩個車道的 車輛可能忽然加速超越我車,或者即將切入我方車道 前方,這些動作都可能對駕駛者造成威脅。視窗5
主 要在偵測車道前方的車輛。如果車道前方的車輛突然 減速而造成與駕駛者的距離拉近,貝 IJ其所造成的威脅 最大,駕駛者須對特別注意發生在此視窗中的危險動 向。其中川、 W2
、 W3
及
W4
的大小為
100x
80 像素(pixel)
,而叭的大小為 80x80 像素 (pixel) 0 W} 、W
2
、W
3
、W
4
及
W
s
之位置分佈園,如圖卡四。圖十 五即為「前車減速接近本車」的視窗分割情形。14
F車 f主珮 方王星王島 陳世旺(爪,爪,TM)(爪, f~2:...'
fw: )...
(f~n_l
'
f~_l ,~.., f~_l
)
(爪,元叫)
+ +
ART2
n _1I I
A盯2n
I
• •
#
(winner)
1Decision making
圖十三定性特徵之擷取與辨講流程圖。高速公路上鄰近移動車輛之動向偵演j
15
圖十四
所切割之五個視窗位置分佈團:以綠色外框代表叭,以黃色外框代表圳,以
紅色外權代表叭,以藍色外框代表叫,以橘色外框代表叭。
(吋 Jez--、 LU 、‘,/(C)W1
Aq W A 月,(d)w
2 司、 M W 、BY ρLW JS 巴、、(g)W
s
圖十五Ca)
r 前車減速接近本單」的注意力圖像,Cb)
(a) 之視窗分割情形, (c) 、 Cd) 、 (e) 、(f)、 (g) 分別代表第一個至第五個切割的視窗 o 針對這五個視窗所分割出的的部分注意力圖像C
MxN
)做橫向切割成十個相等的區塊CMx(NjlO))' 分割的方式如圖十六(b) 。將這十等
分的區塊分別做縱向投影,求其灰階(intensíty
)平 均值。經過這個步驟,任一區塊 i 皆可以由左至右求 出 M 個灰階平均值,這些灰階平均值可以用向量來表示,
X,
=
{x'
l ' X i2,. ..,
X
ìM
卡 i
==
1,2,...,10 。我們認
為利用偏態的觀念可以擷取出符合上述條件要求的 定性特徵,即亮點的分佈情形。利用偏態 (skewness) 的公式,可以求出單一向量本身的偏態程度。另 X ,表 示第 i 個區塊之 M 個灰階平均值之平均所在位置,m
ì2
與
m
i3
分別表示第
i
個區塊的三級動差(
second
moment) 與三級動差(
third moment)
,買 IJ經由下列公陳佳珮 方瓊瑤 陳世目王
主打× xv-ity
IXυ
16
g
j]=司計,
乏jXXij
主(j
XX
y-~,
y
其中已計一, m2=j
=1M
且
IXij
IX
y••••••••••
1-+
2
3
4
5
8
7
B
9
10
(c)
(a)注意力圖像
'(b)
(a)之橫向切割圖, (c) (a)之橫向切割圖。、龜,/ -hU JSE ‘、
(a)
圖十六 負偏態。而當g
j]
=
0
'表示區塊中的亮點分佈為左 右對稱或者無亮點分佈。圖十七即顯示圖十六(b)之注
意力圖像橫向切割所計算出的gi1
值,其中第二至第 九區塊之漸層分佈皆為負偏態,即亮點都集中在右半 部。第一及第十區塊的偏態值皆為零,那是因為這兩 個區塊皆無亮點存在。 由上述公式觀察可知,當g
i\
>
0
'表示區塊中 的亮點集中在左半部,即灰階值平均值之平均所在位 置落在灰階平均值中位數所在位置的右邊,其所代表 的是影像中的漸層分佈屬於正偏態。反之,若g
j]<
0
'表示區塊中的亮點集中在右半部,即灰階 值平均值之平均所在位置落在灰階平均值中位數所 在位置的左邊,其所代表的是影像中的漸層分佈屬於。
-2
4
gil 圖十六 (b)各區塊之偏態值分佈曲線。圖十七
毛
高速公路上鄰近移動車輛之動向偵測 17
同理將圖十六 (a)做縱向切割均分為十等分的區
(爪,爪 ,..., flt7)
、
(爪,瓜,..., fw~)
塊,如圖十六(c) ,再分別做橫向投影,照上述的步驟
(此,爪月)
、
(爪,元月)
與
亦可以求得十項偏態值,如圖十八所示。其中第八、
(爪,爪月)分別代表第一至第五個視窗分割
第九和第十區塊之漸層分佈皆為負偏態。將縱向投影 後所得的特徵向量。在本研究中 m=20
'前十項為 與橫向投影分別求出十組偏態值以向量表示,就成為 橫向切割所的得到之偏態值,後十項為縱向切割所的 本研究所謂定性特徵的特徵向量,我們以 得到之偏態值。O
。.2
gi1.0.4
。.6
。.8
圖十八 圖十六 (c) 各區塊之偏態值分佈曲線。 以圖十九為例,我們可以發現圖十九 (a)與圖卡九 (b)為左右對稱的注意力圖像。它們的橫向切割所得到 之偏態值(圖十九 (c)與圖十九(d)) 是上下對稱的, 至於它們的縱向切割所得到之偏態值(圖十九(e)與圖 十九(f) )為左右對稱的。因此如果無法利用橫向切割 所得到之偏態值來分辨它們的特徵,我們還可以利用 縱向切割所得到之偏態值來分辨它們的特徵。如果這 兩個方向還是無法辨別它們,亦可以考慮右斜或左斜 的度角的方向切割,甚至其他方向角度的切割。但是 在本例中,橫向切割與縱向切割所提供的資訊已足 夠,因此不考慮其他方向的切割。18 陳f圭珮 方正重I& F.車世 E王
(a)
(b)
15
。
10
-5
5
-1 日。
-15
2
34
5
67
8
9
1 日(c)
(d)
。
。
-5
-5
-1 日-10
-15
-15
(e)
(t)
圖十九
Ca) 與 Cb) 為對稱的注意力圖像, Cc) 與 Cd) 各為他)與 Cb) 之橫向切割之偏態
值, Ce) 與 Cf) 各為他)與 Cb) 之縱向切割之偏態值。四、概念分析器(conceptual analyzer)
由知覺分析器所得到的特徵向量,傳送至概念分 析器以作出分類的依據。概念分析器主要分為兩個模組,一為 CART(
configurable adaptive resonance
the。可
11) 類神經網路模組;另一為決策產生器 (decision making)f臭魚目。
(一)
CART( configurable adaptive resonance theory
11) 類神經網路模組
CART( configurable adaptive resonance theory II)
類神經網路其實就是 ART2 類神經網路的改良版。首 先 CART 會對輸入的特徵向量做分類,此一輸入特徵 向量將與系統中在長期記憶里事先儲存完整訊息進 行分類比對。若比對成功,買iJ輸出比對結果。但若長 期記憶中儲存的與實際從影像中粹取出的特徵向量 在比對時由於環境因素仍有些微差異,那麼可以利用
supervised
leaming 的方式稍為調整長期記憶的內容 以符合目前外在環境的改變。反之,若辨識失敗,表 示系統面臨了某類尚未學習過的新物件,系統將利用unsupervised
leaming 的方式將學習新物件類別並儲 存於長期記憶中。當長期記憶學習並記錄了此一新的 類別,員 IJ 會使得再次比對的結果轉為成功並輸出此新 的類別。上述機制非常適合用 Carpenter 以及 Grossberg 所提出的 ART2 [7] 來實現。 由於先前找定性特徵峙,我們將注意力圖像分割 成 5 個視窗,因此針對每個視窗便需要一個 CART 類 神經網路來進行分類的工作。在知覺分析器中所得到高速公路上鄰近移動車輛之動向偵測
19
其中 T= 三口 ,
n
=
1
,
2
,
3
,.
..,5 。
m~l 的定性特徵之特徵向量具有正值與負值(正偏態與負 偏態) ,然而 CART 類神經網路只能處理正值的特徵 向量,可利用下列公式將之前所得到的定性特徵之特 徵向量轉換成正值。 以圖十七與圖十八為例,利用式(1 0)可得到新的偏態 值如表 1 。力仟卅
(10)
表 1 圖十七與圖十八之偏態值轉換 m 值 原本的偏態值 轉換後的偏態值0.0000
0.5000
2
-0.2382
0
.4963
3
-3.6733
0
.4444
4
-5.5736
0
.4157
5
-5.6619
0
.4143
6
-5.6619
0
.4143
7
-5.6495
0
.4145
8
-4
.2310
0
.4360
9
-0.9116
0
.4862
10
0.0000
0.5000
11
0.0000
0.5000
12
0.0000
0.5000
13
0.0000
0.5000
14
0.0000
0.5000
15
0.0000
0.5000
16
0.0000
0.5000
17
0.0000
0.5000
18
-0
.2536
0
.4961
19
-0.5129
0
.4922
20
-0.7008
0
.4894
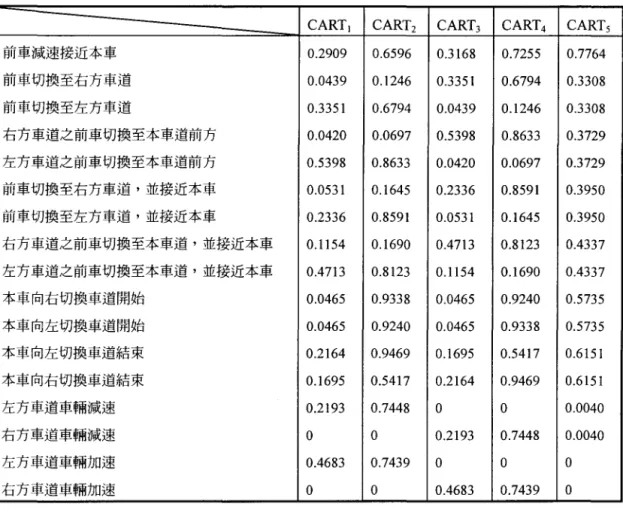
將轉換過後的特徵向量輸入 CART 類神經網路 後會得到分類結果。或許我們在某個視窗中無法分辨 出某些注意力圖像的類別,但是這些圖像可能可以在 其他的視窗中被分辨出來。另外,有些注意力圖像在 某些視窗中所呈現的漸層分布可能相當類似,也就是 特徵相當雷同,但是在其他的視窗中所呈現的漸層分 布就不一定會雷同。這些情況都是為什麼要利用多個 視窗分割的原因。有時候某個 CART 類神經網路因為 特徵資訊不足,可能會做出錯誤的分類,這樣的狀況 本系統是可以容忍的,因為系統可以利用其他 CART 類神經網路的輸出來做修正,以便獲得較正確的分類 結果。因此本文中設計了 A 個機制來整合各個 CART 類神經網路之分類結果,以提供一個正確的障礙物動 向來讓提醒駕駛者注意。20
陳俊珮方瓊瑤陳世旺(二)決策產生器(
decision making )模組
由於系統所接受的輸入為一序列的注意力圖像,因
系統將得到的注意力圖像分割成五個視窗,再分 別利用五個 CART 類神經網路作分類的工作。由於每 個分類結果不一定會相同,因此五個 CART 類神經網 路之分類結果便要整合以便輸出最後的決定。在整合 分類結果時,我們所利用的方法是 fuzzy integral 的技d;
•
.
•
•
.
•
高f吭 lS 2
ZFA 4s7l -
.
'"'2
.
U
••
•
•
.
S 2
t-1
司CART]
CART
2••••
此 CART 類神經網路也會得到一序列的分類結果,如 圖二十所示。系統會針對每個 CART 類神經網路的序 列輸出在每→個時間點上整合出一個分類結果,分別 以叫,吭,..., d; 表示。最後再整合這些結果以輸出最 後的分類結果 (Dt )。最後的分類結果可能為單一狀 況或者多種狀況。n
t
• • • Id
l
••
•
.
•
•
•
Sl-r,.
•
F1
st-
r" n•
.
E E•••
•
S
2S
n4
l
nCART
I • • • ICART
n 圖二十 整合個別CART
類神經網路的分類結果之流程圖。紅色方框代表針對個別CART
類神經網路整合某段時間之分類結果:綠色方框代表整合每個紅色方框整合後 之結果。 令sJ
丹+ls; 市2..d
表示 CART;
類神經網路在時間t-r
,
至時間I
中所輸出的一序列分類結果,其中η
代 表某一動作之時間。為了簡化符號的表示方法,我們以
S]S2"'
S
r.
來代表
s;-m14 月+2...s;
,其中以符號S1
取
代符號sf
刊,以符號S2
取代符號
s:
一月 +2,以此類推。
令
L
=
{IO
,I1'...,
I
,.}
代表CART;
類神經網路所能 夠辨識的標記集合,其中包含空標記l0
,每個標記Ij
分別對應至事先所存好的障礙物動向類另 IJPj
0每個
由
CART
I
類神經網路所輸出的分類、結果皆會對應到高速公路土鄰近移動車輛之動向偵 iM 21
令 h(﹒)與 g(﹒)分別表示 fuzzy integral 中的信心 函數 (confidence function) 與模糊計量函數(
fuzzy
measure
function) 。信心函數 h:L → [0, 1] 定義於集
合 L 上;而模糊計量函數 g: 2
L→
[0, 1] 定義於集合
L 的幕集合 (power set) 上。模糊計量函數 g(.) 有多 種選擇方法,但是無論選擇哪一種方法,都必須符合 以下的特性:1.
g(Ø)=O 且 g(
L)
=
1
(boundary property
)。
2.
當 B 三三 A 時
,
\lA, B ε 2
L,
g(B) 主 g(A)
( monotonicity property
)。3. 如果 A]
cA
2 c... 貝IJlim g(A;)
=
g(
U
A; ) (
continuity
property) 。4. 如果 A]
::::>A
2 ::::>...貝IJlim
g(A;)
=
g((ì
A; ) (
continuity property
)。 對於不同的應用所定義出的信心函數與模糊計 量函數也不盡相同。在本應用中,針對 CART,類神經 網路在時間 t-r;-j 的分類結果 Sj 之信心函數,定義如下:
I
w
(j,
k)
hs.
(Sk)
=
i
w' (j主L
lllpj -
Pkll
其 中 w叫昀(j州 =1+JefJJGJ」L!l
門
if
1)
=lk
otherwise
h口曰ï
0Ilp
j -Pkll 代表類別 Pj 與棚IJpk 的
差異值。人 ,lk ε L' 其中 k
=
1
,
2
,
3
, ...,
lj0α 與 β 為
指定變數。而模糊計量函數則是利用注意力圖像在某 個視窗中的亮點面積之於整張注意力圖像的亮點面 積之比例所得到,如表 2 0 對於分類結果 S, 的整合值定義如下:e'J
=
f\
(如 g=:it尸 ^g(九)}
,
其中〈代表具有 t-norm 特徵的模糊交集(fuzzy
intersection)
凡 ={s|JLJ(5) 去的。
CART,類神經網路的中間決策集合 d~( intermediate decision set
)之元素為最大整合值或與 最大整合值相差小於 F 之標記,定義如下:d~
=
{t I
the
c∞orrespo恤其中 e丸ma缸x
才耳!aR叭{扣e咒叭5叮j)} , F 為門檻值。假設 CART,
類神經網路的中間決策集合包含 m; 個元素,即代表
d~ ={l; , l~ ,..., l~} 而 l; 表示 CART; 類神經網路的輸
出標記,其中 i
=
1
,
2
,
3
,
...刀 , j=1, 2, 3,..., m 。因
此我們可將整合中間決策集合為最後決策集合D
t={叫, d~ ,..., d汁,其定義如下:
D'
=
{lll
=
arg
(f(l'))
wheref
(l')
>
r'
,
forall
l'
EL}
,
其中 /(l')=I=l 立 n(δ(1' , 月)<)
,
l~ ε 靴, e; 為其 l;
所對應之整合值。函數次l',l")~{~
if
1'= 1"
otherwise
其中 r' 為門檻值。最後決策集合即為我們所要輸出 以提醒駕駛者注意的障礙物動向狀況,可能為單一或 多種狀況。22
陳佳珮方瓊瑤陳世旺表 2 利用類別在視窗中的亮點面積在整個的亮點面積之比例所得到的模糊計量函數。
CART]
CART
2CART
3CART
4CART
s
前車減速接近本車
0.2909
0.6596
0.3168
0.7255
0.7764
前車切換至右方車道0.0439
0.1246
0.3351
0.6794
0
.3308
前車切換至左方車道0.3351
0.6794
0.0439
0.1246
0.3308
右方車道之前車切換至本車道前方0.0420
0.0697
0.5398
0.8633
0
.3729
左方車道之前車切換至本車道前方0.5398
0.8633
0.0420
0.0697
0.3729
前車切換至右方車道,並接近本車0.0531
0.1645
0.2336
0.8591
0
.3950
前車切換至左方車道,並接近本車0.2336
0.8591
0.0531
0.1645
0
.3950
右方車道之前車切換至本車道,並接近本車0.1154
0.1690
0
.4713
0.8123
0
.4337
左方車道之前車切換至本車道,並接近本車0
.4713
0.8123
0
.1154
0.1690
0
.4337
本車向右切換車道開始0.0465
0.9338
0.0465
0.9240
0.5735
本車向左切換車道開始0.0465
0.9240
0.0465
0.9338
0.5735
本車向左切換車道結束0.2164
0.9469
0.1695
0.5417
0.6151
本車向右切換車道結束0.1695
0.5417
0.2164
0.9469
0.6151
左方車道車輛減速0.2193
0.7448
O
O
0.0040
右方車道車輛減速O
O
0.2193
0.7448
0.0040
左方車道車輛加速0
.4683
0.7439
O
O
O
右方車道車輛加速。
O
0
.4683
0.7439
O
實驗結果
本節以實驗來驗證前面所探討的障礙物動向偵 測。輸入的影像為利用架在車上的數位攝影機 SONY TRV-900 所拍得的彩色影像,影像大小為 640*480( 像 素) ,不過為了節省處理時間以及處理器之工作量, 我們將影像 down-sample 為 160*120 (像素)後再輸 入系統內。系統每秒處理 5 張影像,每張影像處理的 時間大約是 0.2 秒。 圖二十一為「前車切換至左方車道並接近本車」 的路況在各張影像中五個視窗的模糊整合值。這個路 況中主要是發生在所拍得影像的左下角位置,也就是 在第二個視窗中,因此第二個視窗所提供的資訊具有 較高的信心值。我們可以發現第二個視窗的模糊整合 值(大約為 0.86 )高於其他視窗的模糊整合值。而系 統亦輸出具有夠大整合值的狀況出來,也就是「前車 切換至左方車道並接近本車」這個結果。至於其他視 窗的模糊整合值幾乎都低於 0 .4 '其中第四個視窗的 模糊整合值忽高忽低代表所拍得的影像在這個視窗 中有些許的亮點變化,其亮點的變化是由於在此視窗 有些微的干擾存在。 圖二十二為「右方車輛加速」的路況在各張影像中 五個視窗的模糊整合值。這個狀況主要發生在取得影 像的右下角位置,也就是在第四個視窗中。相較於圖高速公路上鄰近移動車輛之動向偵測 23 二十一的路況,我們可以發現障礙物所在位置具有相 當大的重要性。圖二十二的第四個視窗具有相當大的 模糊整合值(大約為 0.93) ,其餘的視窗的模糊整合 值則皆都低於 0 .4。至於第三個視窗之所以會提高模 糊整合值原因是當右方車輛加速時,右方車輛會往第 三個視窗的位置移動(大約在第三個與第四個視窗重 疊的位置)。同樣地,系統也能輸出「右方車輛加速」 這個狀況讓駕駛者注意。另外,圖二十三為「左方車 道之前車切換至本車道並接近本車」的例子。
~
~
0.8
a
o.6
吐』 百 0.4 >, 同 0.2 3r.r...
0
前車切換至左方車道並接近本車 …………一…一一一…一一一一一一一…………一一一「 '\珊... /l- 、屯....,/-' 丸八 九恥,咿咿卅抖羽絨1
3
5
7
9
11
13
15
17
Frame
#
of thc sequences
一←第 i個視窗.-....
一第2個視窗 第3個視窗 第4個視窗 →←一第5個視窗 圖二十一 「前車切換至在方車道並接近本車」的路況在各張影像中五個視窗的模糊 t1) D 整合值。~
0.8
a
0.6
t1)百 0.4
〉、 問 0.2 3 以4。
右方車輛加速4 7 10 13 16 19 22 25 28 31 34
Frame
#
of the
sequenc治l →一第 1 個視窗 一峰一第2個視窗 第3個視窗 第4個視窗 →一第5個視窗 圖二十二 「右方車輛加速」的路況在各張影像中五個視窗的模糊整合值。
24
陳佳珮方瓊瑤陳世 E王左方車道之前車切換至本車道並接近本車
!
3ω50.8
1
益ω日 。 6
山一一一一一…一一一…
h 叫柵欄糊糊咿咿啥叫叫州州柳州 →一第 1個視窗一路~第2個視窗 第3個視窗 第4個視窗0
.4
、〉、0.2
川ωwω吋戶
..
tr叭....,...斗r1
門闖闖闖啊?呻吋間閃閃悶悶閻閉,。
! . . i
1 4 7 10 13 16 19 22 25 28 31 34 37 40
戶辦一第51固視窗
frarne
#
of the sequence
圖二十三 「左方車道之前車切換至本車道並接近本車」的路況在各張影像中五個視 窗的模糊整合值。
結論
在本研究中,我們提出一個利用影像處理技術的 方法來偵測高速公路上鄰近車輛的危險動向,並提醒 駕駛人注意,以盡量避兔車禍的發生。這些危險的動 向主要是對駕駛者的行車安全造成威脅的動作,也就 是與駕駛者所駕駛車輛之距離拉近者。系統主要由三 個部份所組成,分別為感覺分析器(sensory
analyzer 卜知覺分析器 (perceptual analyzer) 與概念
分析器(conceptual analyzer) 。感覺分析器可用來找出
影像中有移動的物體,主要為與駕駛者所駕駛車輛有 相對速度的鄰近車輛。接著知覺分析器中的 STA(spatial-temporal
attention) 類神經網路模組的輸出 層,也就是注意力圖像,會顯現出移動物體的移動方 向;然後我們利用五個視窗分割注意力圖像,分別送 至五個 CART 類神經網路來做分類的工作;最後利用 模糊理論整合分類結果。 由於影像收集的困難,因此我們目前僅用單一狀況 的注意力圖像來做實驗。將來打算用單一狀況的注意 力圖像重疊以模擬出可能發生的多種狀況的注意力 圖像。並儘可能實際拍攝多種情況發生的影像來驗證 我們提出的方法。之後更希望系統能夠直接透過車載 型電腦處理,並透過語音輸出危險的狀況給駕駛人注 意,以提供更良好的使用介面。高速公路上鄰近移動車輛之動向偵 iM
25
參考文獻
Carpenter
,
G. A.
,
&Grossberg
,
S.
(1
991). Pattern Recognition by
Venhovens
,
P.
,
Bemasch
, 1.,
Löwen帥,J.
,
Rieker,旺, &Schraut
,
Selforganizing Neural Networks
,
ED 叮leMIT Press
,
M.
, (1
999).
The application of advanced vehi
c\e navigation
Cambrid阱,
Massachusetts
,
397-423.
in BMW driver assistance systems
,
Society
o[ Automotive
Engineers Congress
,
Detro此,US
A.Fang
,
C.
Y.,
Chen
,
S.
w.,
&Fuh
,
C.S. (2003). Automatic change
detection of driving environments in a vision-based driver
assistance system. To appear in the IEEE Transactions on
Neural Networks.
(N
SC
90-22 日 -E-003-002)(SCI)
Fang
,
C
玄, F曲,c.
S.
,
&
Ch凹,S.
W.(2002). Driving
environmental change detection subsystem in a vision-based
driver assistance syste
m.Proceedings
o[ IEEE Jnternational
Joint Conference on Neural Networks
,
Honolulu
,
Hawaii
,
Vo\.l
,
246-251.
Martindale
,
C.(1991). Cognitive Psychology
,
A Neural-Network
Approach
,
Brooks/Cole Publishing Company
,
Pacific Grove
,
Califomia
,
95-116.
Naab
,
K.
& Reicha此,G.
(1
994). Driver assistance systems for
lateral and longitudinal vehi
c\e guidance - Heading control
and active cruise control
,
Proceedings
o[ Advanced
r台hicleControl
,
Tsukuba Japan
,
pp. 449-454.
Reicha此,
G.
,
Haller
,
R.
,
&Naab
,
K.
(1
995). Towards future driver
assistance systems. Automotive Technology lnternational
,25-29
Schraut
,
M.
,
Nωb,K.,
&Bachmann
,
T.(2000). BM
W's driver
assistance concept for integrated longitudinal
suppo此 The7th Jntelligent Transport
鈔stemsWorld Congress
,
Paper No.
2121
,
Turin
,
Italy.
作者簡介:
陳佳珮,國立台灣師範大學資訊工程所研究生。
Chia-Pei Chen is a graduate student in the Department of
Computer Science and Information Engineering at
National Taiwan Normal University
e-mail: peggy@csie.ntnu.edu.tw
方瓊瑤,國立臺灣師範大學資訊教育系講師。
Chiung-you Fang is an instructor in the Department
of Information and Computer Education at National
Taiwan Normal University
e-mail: violet@ice.ntnu.edu.tw
陳世旺,國立臺灣師範大學資訊旺程研究所教授
Sei-Wang Chen is a Professor in the Department of
Computer Science and Information Engineering at
National Taiwan Normal University
E.
mail: schen@csie.ntnu.edu.tw
收稿日期: 91 年 12 月 11 日 修正日期: 91 年 12 月 18 日 接受日期: 91 年 12 月 19 日
Joumal ofTaiwan Nonnal University: Mathematics, Science & Technology 2002, 47(2), 1-26
Motion Detection for Nearby Vehicles
*Chia-Pei Chen **Chiung-Yao Fang *Sei-Wang Chen
* National Taiwan Nonnal University
Department of Computer Science and Infonnation Engineering **National Taiwan Nonnal University
Department of Information and Computer Education
Abstract
We propose a system which can detect the motion pattems of nearby vehicles on an expressway. The system consists of three components: sensory