©2007 National Kaohsiung University of Applied Sciences, ISSN 1813-3851
市電併聯型柴油引擎
市電併聯型柴油引擎
市電併聯型柴油引擎
市電併聯型柴油引擎-
-
-風能混合式系統動態特性分析
-
風能混合式系統動態特性分析
風能混合式系統動態特性分析
風能混合式系統動態特性分析
~
~
~
~柴油引擎發電系統供應緊急用電
柴油引擎發電系統供應緊急用電
柴油引擎發電系統供應緊急用電
柴油引擎發電系統供應緊急用電
陳海強 陳海強 陳海強 陳海強*、、、、陳盟仁陳盟仁陳盟仁*、陳盟仁 、、劉光倫、劉光倫**、劉光倫劉光倫 、、林堉仁、林堉仁林堉仁***、林堉仁 、、王基仲、王基仲王基仲* 王基仲 *國立高雄應用科技大學電機工程系 **中鴻鋼鐵股份有限公司儀電課 ***義守大學電機系 E-mail: [email protected]摘
摘
摘
摘 要
要
要
要
本論文主要在探討一個市電併聯型柴油引擎-風能混合式系統在柴油引擎發電系統供應 緊急用電情況下的動態特性。該系統主要包括 11.4kV 市電、三套柴油引擎發電系統、三套風 能發電系統、以及其他組件。研究範圍除了系統組件的數學模型推導外,也包含了相對應的 SimPowerSystems 模組開發與進一步的動態特性模擬與分析。研究結果顯示此系統在這種運 轉模式下的動態特性是合理的並且應可和實際運轉情形一致。本研究最大的價值是可做為系 統規劃、運轉、以及系統擴充的重要參考。 關鍵詞 關鍵詞 關鍵詞 關鍵詞::::柴油引擎發電系統柴油引擎發電系統柴油引擎發電系統、柴油引擎發電系統、、風能發電系統、風能發電系統風能發電系統風能發電系統、、混合式系統、、混合式系統混合式系統、混合式系統、、、動態特性分析動態特性分析、動態特性分析動態特性分析、、SimPowerSystems。、 。。。1. 前
前
前 言
前
言
言
言
由於世界各國工業發達,導致大量的溫室氣體產生,這些溫室氣體造成地球氣溫的上升 及海平面的升高。許多科學家不斷提出警告-氣候暖化可能造成毀滅性災難。有鑑於此,聯 合國在 1997 年於日本京都召開防止全球氣候暖化國際會議,與會各國政府在會中提出京都議 定書這項協定,希望能以 1990 年為標準,在 2008 年至 2012 年的 5 年內,降低包括二氧化碳 在內的六種溫室氣體 5.2%的排放量。根據聯合國表示,目前已簽署這項協定的國家已超過 140 個[1]。 根據統計,全球在再生能源發電方式中,風能發電的潛力相當雄厚。在風能發電方面, 根據 IEA 的統計,至 2006 年底,全球風能發電裝置容量約為 74,306MW,並且以接近 24.4% 的速度在成長,所發出來的電量足以供應台灣地區約二分之一的用電需求,由此可見發風能發電受重視的程度[2]。 根據民國 94 年「第二次全國能源會議」結論,我國將研訂二氧化碳管制機制,至 2015 年底減少 3,800 萬公噸,2020 年減少 5,868 萬公噸,2025 年減少 7,841 萬公噸;再生能源推 廣利用 2010 年裝置容量達 5,130MW,2020 年達 7,000~8,000MW,2025 年達 8,000~9,000MW, 以達成總裝置容量佔比 12%為目標,或能源結構佔比 4~6%;推廣再生能源開發利用,包括 生質能、風力、太陽光電、太陽熱能、氫能及燃料電池、海洋能、地熱等;規畫具經濟規模 之陸域或海上風力站以及扶植國內風能發電產業發展[3]。 在柴油引擎-風能混合式發電系統的文獻方面,有許多論文做了深入的探討。在模擬與 動態分析方面,Sharma 等人探討風能-柴油引擎混合式系統應用在偏遠地區的動態特性,包 括聯結問題、互聯系統的相互干擾、虛功的改善、減少風力發電機輸出損失等問題[4]。Uhlen 等人分析與設計獨立型風能-柴油引擎混合式系統在不同頻率下的控制方法[5]。Ghali 等人提 出不同諧波對系統的影響,並以三階變頻器來消除諧波,使得系統獲得更佳的可靠度並且減 少能量損失[6]。Muljadi 等人討論電力品質對風能-柴油引擎混合式系統的影響以及負載與頻 率切換的問題[7]。Consoli 等人對混合式系統的元件進行估算與模擬[8]。Bansal 等人以基因 演算法調整靜態虛功率補償器使系統能夠自動將虛功率控制在理想的範圍內[9]。此外,在系 統方面,Sebastian 等人探討當高風力時應用在風力-柴油引擎混合式系統的控制系統[10]。 Bialasiewicz 等人研究一套用於分析暫態與穩態間互相影響的新系統,可取代現行的控制方 法,使整個系統能擁有更佳的性能[11]。Senjyu 等人提出一套新的電力系統架構,該系統可以 應用在偏遠地方或小島上,持續提供電力[12]。 本論文主要在探討一個市電併聯型柴油引擎-風能混合式發電系統在柴油引擎發電系統 供應緊急用電情況下的動態特性。研究結果顯示此系統在這三種運轉模式下動態特性是合理 的並且應可和實際運轉情形一致。本研究最大的價值是可做為系統規劃、運轉、以及系統擴 充的重要參考。
2. 市電併聯型柴油引擎
市電併聯型柴油引擎
市電併聯型柴油引擎-風能混合式發電系統數學模型
市電併聯型柴油引擎
風能混合式發電系統數學模型
風能混合式發電系統數學模型
風能混合式發電系統數學模型
2.1 市電併聯型柴油引擎市電併聯型柴油引擎市電併聯型柴油引擎-風能混合式發電系統架構市電併聯型柴油引擎 風能混合式發電系統架構風能混合式發電系統架構風能混合式發電系統架構 圖 1 為一個市電併聯型柴油引擎-風能混合式發電系統的架構。此系統的組件包括 11.4kv 市電(Grid)、風力機(Wind Turbine)、感應發電機(Induction Generator)、柴油引擎(Diesel Engine)、同步發電機(Synchronous Generator)、激磁系統(Excitation System)、變壓器(Power Transformer)、功因補償電容器組(Pf Compensation Capacitor Bank)、以及集總的靜態負載 (Lumped Static Load)。系統組件參數列於附錄 A 中。圖 1 市電併聯型柴油引擎-風能混合式發電系統 2.2 狀態空間表示法狀態空間表示法狀態空間表示法 狀態空間表示法 狀態空間表示法(State-Space Representation)是利用一組首階的微分方程式來建立系統 組件甚至整個系統的動態模型。利用此方法可以將組件模組化後再進一步加以連結,如此, 可以使得研究的系統架構具有彈性而且多元化[13,14]。 利用狀態空間表示法,可以將系統組件表示成
[ ] [ ][ ] [ ][ ]
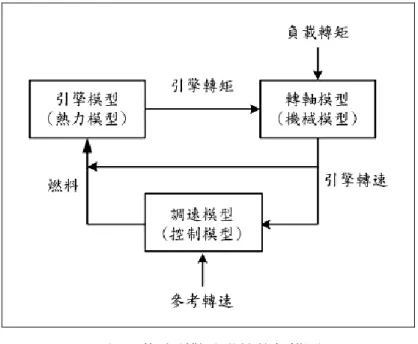
p x = A x + B u (1) 其中[x]是 n 維的狀態變數矩陣,[A]是 nxn 維的係數矩陣,[u]是 m 維輸入矩陣,[B]是 nxm 維 控制矩陣,p 是微分運算子。 2.3 柴柴柴油引擎原動機模型柴油引擎原動機模型油引擎原動機模型 油引擎原動機模型 柴油引擎原動機模型的建立常常是藉由採用製造商所提供的引擎特性資料來完成。圖 2 為一個柴油引擎原動機的架構圖。此模型主要包括三個子系統-熱力模型、調速模型、以及 轉軸模型[15]。圖 2 柴油引擎原動機的架構圖 在熱力模型方面,在正常情況下引擎的轉矩和燃料成正比。在空氣供應充足的情況下, 燃料能夠完全燃燒,因此轉矩可以考慮成和油箱準位成正比。然而,在暫態以及重載情況下, 燃料無法完全燃燒,此時轉矩會受到空氣供應量的限制。為了要改善此種情形,通常會裝設 渦輪增壓器。 在調速模型方面,轉速調節是透過原動機的調速系統來實現。當發電機轉速偏離額定轉 速時,調速機構會偵測到轉速變動,因而改變輸入閥門的位置,調整原動機的輸出,使速度 達到穩態值。圖 3 為一個典型的柴油引擎調速系統的架構圖。此系統的狀態方程式可以表示 成方程式(2)。 圖 3 典型的柴油引擎調速系統方塊圖
1 1 1 2 2 1 2 2 3 3 3 3 4 4 5 5 5 5 5 6 6 7 7 6 7 7 7 K 0 0 0 0 0 0 T 1 1 1 0 0 0 0 0 x T T x x 1 1 x 0 0 0 0 0 x T T x x x p 0 0 0 0 0 0 0 x K 1 x 0 0 0 0 0 T T x x 1 x x 0 0 0 0 0 0 T K 1 0 0 0 0 0 T T − − − = + − − − 1 e ref 3 3 L LA 6 0 0 0 0 0 0 T g 0 0 0 0 0 0 0 1 0 0 0 0 0 0 T x 0 0 1 1 0 0 0 x 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 T 0 0 0 0 0 0 0 ϖ ϖ − (2) D 3 D 3 D 3 3 L 2 3 e 3 3 3 T T T x x ( 1 ) x T T T ϖ = + − + (3) 5 D 5 D 5 5 L 4 5 5 5 K T T x x ( 1 )x T T = + − (4) 其中 g 為負載控制信號,ωe為引擎轉速,ωref為參考轉速,xLA為 x5L經過限制器的值。狀態 變數,T 為時間常數,K 為增益。 在轉軸模型方面,原動機和旋轉電機之間都會有傳動系統(Transmission System),只是 複雜程度不同而已。圖 4 為一個簡化的雙質量體傳動系統架構圖。此系統可以使用旋轉體一 的 角 位 移 θ1 和 旋 轉 體 二 的 角 位 移 θ2 表 示 成 一 個 二 階 的 微 分 方 程 式 , 其 自 然 頻 率 為 (π/2)(K/J1+K/J2)1/2。此系統可以利用狀態方程式表示成 1 1 1 12 12 1 1 1 1 1 1 1 b1 1 1 2 2 2 b 2 2 12 2 12 2 2 2 2 2 2 2 0 1 0 0 0 0 0 0 C C C K K 1 1 0 0 J J J J J J p 0 0 0 1 0 0 0 0 C C C 1 1 K K 0 0 J J J J J J τ θ θ τ ω ω τ θ θ τ ω ω − − − − = + − − − − − (5) 其中 J1是旋轉體一和耦合器總和的轉動慣量,J2是旋轉體二和耦合器總和的轉動慣量,K1是 轉軸一的硬度係數(Shaft Stiffness),K2 是轉軸二的硬度係數,C1 是旋轉體一的阻尼係數 (Damping Coefficient),C2是旋轉體二的阻尼係數,C12是旋轉體一和旋轉體二連接軸的阻尼 係數,τb1是旋轉體一的軸承損失(Bearing Loss),τb2是旋轉體二的軸承損失,K 是 K1與 K2 的總和[16]。
2.4 風力機模型風力機模型風力機模型 風力機模型 圖 5 為風通過風力機葉片的示意圖。根據空氣動力學,風力機葉片上的推力可表示成
(
1 2)
T T F =ρA U U −U (6)其中 U1是葉片前面的風速,U2是葉片後面的風速,AT是葉片掃過的面積,UT是葉片位置的 平均風速,ρ 是空氣密度,在 15℃時為 1.225kg/m3。 圖 4 簡化的雙質量體傳動系統架構圖 圖 5 風通過風力機葉片的示意圖 風力機葉片的輸出功率可表示成 3 m P T T 1 P C A U 2 ρ = (7) 其中 Cp是功率係數(Power Coefficient)。上式顯示出葉片所擷取的風能正比於 Cp值,亦即,
Cp值愈大,風力機擷取的風能越多。根據貝茲定律(Betz’s Law),理想的風力機 Cp為 16/27。 然而,在考慮風力機的其它設計因數之後,Cp應表示成
(
)
1 2 2 P 2 l 3 d 8 1.32 0.57 16 20 C C 1 27 B C 2B λ λ λ λ λ − − + = + − + (8)其中 λ 是葉片的尖端速度比(Tip Speed Ratio),B 是葉片數目(Number of Blades),Cl/Cd是 風翼(Airfoil)浮力對拉力的比值(Lift to Drag Ratio)[17,18]。
2.5 同步發電機模型同步發電機模型同步發電機模型 同步發電機模型 同步發電機的電壓方程式參考到轉子軸後可表示成 qs s q r d mq r md r md qs ds r q s d r mq md md ds kq mq kq kq kq fd md fd fd md fd kd md md kd kd kd v r pL L pL L L i v L r pL L pL pL i v pL 0 r pL 0 0 i v 0 pL 0 r pL pL i v 0 pL 0 pL r pL i ω ω ω ω ω − − − − − − = − + − + − + (9) 其中 vds、ids是 d 軸定子電壓及電流,vqs、iqs是 q 軸定子電壓及電流,vkq及 ikq是 q 軸阻尼繞 組電壓及電流,vfd、vkd、ifd以及 ikd是激磁繞組電壓、d 軸阻尼繞組電壓、激磁繞組電流、以 及 d 軸阻尼繞組電流,rs、rfd、rkd、以及 rkq是定子繞組電阻、激磁繞組電阻、d 軸阻尼繞組 電阻、以及 q 軸阻尼繞組電阻,Ld、Lq、Lfd、Lkd、以及 Lkq是 d 軸電感、q 軸電感、激磁繞組 電感、d 軸阻尼繞組電感、q 軸阻尼繞組電感,Lmd及 Lmq是 d 軸互感及 q 軸互感,p 是微分運 算子。此外,同步發電機所產生的電磁轉矩也可表示成 e m d d s fd k d q s m q q s k q d s 3 T n L ( i i i )i L ( i i )i 2 = − + + − − + (10)
其中 n 是極對的數目(Number of Pole Pairs)[19,20]。
2.6 激磁系統模型激磁系統模型激磁系統模型 激磁系統模型
自 1968 年起 IEEE 就陸續提出激磁系統(Excitation System)的各種動態模型並且廣泛的 應用在各種研究[21-24]。激磁系統的基本原理是藉由同步發電機端電壓回授訊號與參考信號 相比較後經自動電壓調整器(Automatic Voltage Regulator, AVR)及勵磁機(Exciter)來改變
激磁電壓,達到控制端電壓的目的。圖 6 為 IEEE Type 1 激磁系統方塊圖,此系統可以用狀態 方程式表示成 R R A A A 1 1 A A A A 2 2 E E 3 3 E E 4 4 5 5 F 1 F 1 F F F 1 F 2 F 1 F 2 F 2 1 1 0 0 0 0 0 0 0 0 T T K 1 K K 0 0 0 0 0 0 x x T T T T x x ( K S ) 1 0 0 0 0 0 0 0 0 p x x T T x x 1 1 0 0 0 0 0 0 0 0 x x T T K K 1 0 0 0 0 0 0 0 T T T T T − − − − − + = + − − − T REF 2 L 2 L 2 L v v x x x (11) 圖 6 IEEE Type 1 激磁控制系統方塊圖 2.6 三相感應電機三相感應電機三相感應電機 三相感應電機 三相感應電機的電壓方程式參考到靜止軸後可表示成 qs s ss m qs ds s ss m ds qr m r m r rr r rr qr dr r m m r rr r rr dr v r pL 0 pL 0 i v 0 r pL 0 pL i v pL L r pL L i v L pL L r pL i ω ω ω ω + + = − + − + (12) 其中 vqs及 iqs分別是 q 軸定子電壓及電流,vds及 ids分別是 d 軸定子電壓及電流,vqr及 iqr分 別是 q 軸轉子電壓及電流,vdr及 idr分別是 d 軸轉子電壓及電流,Lm是磁化電感,p 是微分運 算子[19-20]。
2.7 三相變壓器模型三相變壓器模型三相變壓器模型 三相變壓器模型 三相變壓器的電壓方程式參考到靜止軸後可表示成 q1 1 11 m q1 d 1 1 11 m d 1 q 2 m 2 22 q 2 d 2 m 2 22 d 2 v r pL 0 pL 0 i v 0 r pL 0 pL i v pL 0 r pL 0 i v 0 pL 0 r pL i + + = + + (13) 其中 vd1及 id1是 d 軸一次側電壓及電流,vq1及 iq1是 q 軸一次側電壓及電流,vd2及 id2是 d 軸 二次側電壓及電流,vq2及 iq2是 q 軸二次側電壓及電流,r1及 r2是一次側電阻及二次側電阻, L11及 L22是一次側自感及二次側自感,Lm是磁化電感,p 是微分運算子[19-20]。 2.9 靜態負載模型靜態負載模型靜態負載模型 靜態負載模型 集總的靜態負載可考慮成包含電阻性和電感性負載,其電壓方程式可表示成 0 0 qk sk sk qk dk sk sk dk v r pL i v r pL i + = + (14) 其中 vdk及 idk是 d 軸電壓及電流,vqk及 iqk是 q 軸電壓及電流,rsk及 Lsk是電阻及電感,p 是 微分運算子[19-20]。
3. 市電併聯型柴油引擎
市電併聯型柴油引擎
市電併聯型柴油引擎-
市電併聯型柴油引擎
-
-風能混合式發電系統動態模擬
-
風能混合式發電系統動態模擬
風能混合式發電系統動態模擬
風能混合式發電系統動態模擬
3.1 SimPowerSystems 模組架構模組架構模組架構 模組架構 圖 7 為使用 SimPowerSystems 開發的模組,主要包括四部分-A 部分為 11.4kV 市電,B 部分為三套柴油引擎發電系統與三個昇壓變壓器,C 部分為三套風能發電系統與一個負載,D 部分為三個負載[25,26]。 3.2 系統變數的量測系統變數的量測系統變數的量測 系統變數的量測 為了詳細瞭解此系統的動態特性,本研究的每個模擬都記錄了大量的系統變數資料,如 附錄 B 所列。這些系統變數的慣例為市電與同步發電機提供實功率給負載時,以正值表示, 反之,則以負值表示;虛功率的表示法相同。感應發電機提供實功率給市電時,以負值表示, 反之,則以正值表示;虛功率的表示法相同。同步發電機電流流出為正值,流入為負值。負 載電流流入為正值,流出為負值。變壓器一次側電流流入為正值,二次側電流流出為正值。圖 7 市電併聯型柴油引擎-風能混合式系統 SimPowerSystems 模組架構圖
3.3 模擬時序圖模擬時序圖模擬時序圖 模擬時序圖
圖 8 為模擬時序圖。負載與風能發電系統依序加入運轉,30 秒時市電因故跳脫,35 秒時 柴油引擎開始供應緊急用電,負載 SL1、SL2、SL3 再度投入,總模擬時間 50 秒。
3.4 模擬結果與評論模擬結果與評論模擬結果與評論 模擬結果與評論 圖 9~15 為系統變數變動的情形,這些變數以附錄 B 所列的標么基底表示。由於三套柴 油引擎發電系統的架構與參數都相同,因此僅呈現其中一部的特性。 前 30 秒的運轉情形中,圖 9a 顯示市電供應的實功率隨著風力機的加入而減少;圖 9b 顯 示市電供應的虛功率隨著風力機的加入儘略微增加,這是因為感應發電機併聯功因補償電容 器組的緣故。圖 9c 顯示 11.4kV 匯流排的電壓會隨著負載的增加而下降,這是市電線路的電 壓降造成。圖 11~13 顯示每一套風力機的風速不同,因此輸出功率不同;感應發電機投入時, 系統有某種程度的暫態,但隨即穩定下來,最後轉速都高於 1.0pu。 30 秒之後的運轉情形中,圖 9、11~15 顯示市電跳脫後,除了市電電源側的電壓恢復到 1.0pu 外,併聯到匯流排的系統組件的實功率、虛功率、電壓、電流都迅速降為 0。風力機的 轉速也逐漸下降。35 秒時柴油引擎發電系統開始供應緊急用電給負載 SL1、SL2、以及 SL3。 圖 10a 顯示發電機無載時的端電壓約為 1.02pu,負載陸續加入之後,下降至約 1.005pu。圖 10c、10d 顯示同步發電系統具有負載追隨性,雖然輸出的電功率達到 0.91pu,轉速仍能維持 在同步速度。圖 9e~f、14、15 顯示靜態負載的電壓、電流、實功率、以及虛功率都受到發電 機端電壓變動的影響。 整體而言,此種運轉模式下系統的動態特性合理而且可以接受。
4. 結論與未來研究方向
結論與未來研究方向
結論與未來研究方向
結論與未來研究方向
本論文主要在探討一個市電併聯型柴油引擎-風能混合式發電系統在柴油引擎發電系統 供應緊急用電情況下的動態特性。研究範圍除了系統組件的數學模型推導外,也包含了相對 應的 SimPowerSystems 模組開發以及進一步的動態特性模擬分析。研究結果顯示,市電跳脫 後,併聯到匯流排的系統組件的實功率、虛功率、電壓、電流都迅速降為零。風力機的轉速 也逐漸下降。柴油引擎發電系統開始供應緊急用電給負載時,發電機端電壓會比無載時低。 再者,柴油引擎發電系統需具有負載追隨性,以便在任何負載下都能維持在同步速度。 整體而言,此系統在幾種運轉模式下的動態特性是合理的並且應可和實際運轉情形一 致。此研究最大的價值是可以做為系統規劃、運轉、以及擴充的重要依據。0 5 10 15 20 25 30 35 40 45 50 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) 1 1 .4 k V 市 市 市 市 市 (a) 11.4kV 市電實功率 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) S L 4 市 市 市 (e) SL4 實功率 0 5 10 15 20 25 30 35 40 45 50 -0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 時時(秒) 1 1 .4 k V 市 市 市 市 市 (b) 11.4kV 市電虛功率 0 5 10 15 20 25 30 35 40 45 50 0 0.02 0.04 0.06 0.08 0.1 0.12 時時(秒) S L 4 市 市 市 (f) SL4 虛功率 0 5 10 15 20 25 30 35 40 45 50 0.95 0.96 0.97 0.98 0.99 1 1.01 1.02 1.03 1.04 1.05 時時(秒) 1 .4 k V 市 市 市 市 市 市 (c) 11.4kV 市電電源側平均電壓 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) S L 4 市 市 市 市 (g) SL4 平均電壓 0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時時(秒) 1 1 .4 k V 市 市 A 相 市 相 (d) 11.4kV 市電 A 相電流 0 5 10 15 20 25 30 35 40 45 50 -1 -0.5 0 0.5 1 1.5 時時(秒) S L 4 A 相 市 相 (h) SL4 A 相電流 圖 9 11.4kV 市電、SL4 變數變動情形
0 5 10 15 20 25 30 35 40 45 50 0.95 0.96 0.97 0.98 0.99 1 1.01 1.02 1.03 1.04 1.05 時時(秒) S G 1 端 市 市 (a) SG1 端電壓 0 5 10 15 20 25 30 35 40 45 50 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) S G 1 市 市 市 (e) SG1 實功率 0 5 10 15 20 25 30 35 40 45 50 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 時時(秒) S G 1 端 市 市 (b) SG1 激磁電壓 0 5 10 15 20 25 30 35 40 45 50 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 時時(秒) S G 1 市 市 市 (f) SG1 虛功率 0 5 10 15 20 25 30 35 40 45 50 0.985 0.99 0.995 1 1.005 時時(秒) S G 1 轉 轉 (c) SG1 轉速 0 5 10 15 20 25 30 35 40 45 50 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) S G T r1 市 市 市 (g) SGTr1 實功率 0 5 10 15 20 25 30 35 40 45 50 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) S G 1 輸 輸 輸 輸 市 市 (d) SG1 輸入機械功率 0 5 10 15 20 25 30 35 40 45 50 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 時時(秒) S G T r1 市 市 市 (h) SGTr1 虛功率 圖 10 柴油引擎發電系統 DE1 變數變動情形
0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時時(秒) W T 1 T r 一 一 一 市 市 市 (a) WT1Tr 一次側實功率 0 5 10 15 20 25 30 35 40 45 50 8 9 10 11 12 13 14 15 時時(秒) W T 1 風 轉 (e) WT1 風速 0 5 10 15 20 25 30 35 40 45 50 -0.5 0 0.5 1 1.5 2 時時(秒) W T 1 T r 一 一 一 市 市 市 (b) WT1Tr 一次側虛功率 0 5 10 15 20 25 30 35 40 45 50 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) W T 1 輸 輸 市 市 (f) WT1 輸入功率 0 5 10 15 20 25 30 35 40 45 50 0 0.5 1 1.5 時時(秒) W T 1 T r 二 一 一 市 市 市 市 (c) WT1Tr 二次側平均電壓 0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時時(秒) W T IG 1 輸 輸 轉 機 (g) WTIG1 機械轉矩 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) W T IG 1 轉 轉 (d) WTIG1 轉速 0 5 10 15 20 25 30 35 40 45 50 -1 -0.5 0 0.5 時時(秒) W T IG 1 市 電 轉 機 (h) WTIG1 電磁轉矩 圖 11 風力機 WT1 變數變動情形
0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時時(秒) W T 2 T r 一 一 一 市 市 市 (a) WT2Tr 一次側實功率 0 5 10 15 20 25 30 35 40 45 50 8 9 10 11 12 13 14 15 時時(秒) W T 2 風 轉 (e) WT2 風速 0 5 10 15 20 25 30 35 40 45 50 -0.5 0 0.5 1 1.5 2 時時(秒) W T 2 T r 一 一 一 市 市 市 (b) WT2Tr 一次側虛功率 0 5 10 15 20 25 30 35 40 45 50 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) W T 2 輸 輸 市 市 (f) WT2 輸入功率 0 5 10 15 20 25 30 35 40 45 50 0 0.5 1 1.5 時時(秒) W T 2 T r 二 一 一 市 市 市 市 (c) WT2Tr 二次側平均電壓 0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時時(秒) W T IG 2 輸 輸 轉 機 (g) WTIG2 機械轉矩 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) W T IG 2 轉 轉 (d) WTIG2 轉速 0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 時時(秒) W T IG 2 市 電 轉 機 (h) WTIG2 電磁轉矩 圖 12 風力機 WT2 變數變動情形
0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時時(秒) W T 3 T r 一 一 一 市 市 市 (a) WT3Tr 一次側實功率 0 5 10 15 20 25 30 35 40 45 50 8 9 10 11 12 13 14 15 時時(秒) W T 3 風 轉 (e) WT3 風速 0 5 10 15 20 25 30 35 40 45 50 -0.5 0 0.5 1 1.5 2 時時(秒) W T 3 T r 一 一 一 市 市 市 (b) WT3Tr 一次側虛功率 0 5 10 15 20 25 30 35 40 45 50 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) W T 3 輸 輸 市 市 (f) WT3 輸入功率 0 5 10 15 20 25 30 35 40 45 50 0 0.5 1 1.5 時時(秒) W T 3 T r 二 一 一 市 市 市 市 (c) WT3Tr 二次側平均電壓 0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時時(秒) W T IG 3 輸 輸 轉 機 (g) WTIG3 機械轉矩 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) W T IG 3 轉 轉 (d) WTIG3 轉速 0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 時時(秒) W T IG 3 市 電 轉 機 (h) WTIG3 電磁轉矩 圖 13 風力機 WT3 變數變動情形
0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) S L 1 市 市 市 (a) SL1 實功率 0 5 10 15 20 25 30 35 40 45 50 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) S L 2 市 市 市 (e) SL2 實功率 0 5 10 15 20 25 30 35 40 45 50 0 0.05 0.1 0.15 0.2 0.25 時時(秒) S L 1 市 市 市 (b) SL1 虛功率 0 5 10 15 20 25 30 35 40 45 50 0 0.05 0.1 0.15 0.2 0.25 時時(秒) S L 2 市 市 市 (f) SL2 虛功率 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) S L 1 市 市 市 市 (c) SL1 平均電壓 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) S L 2 T r 二 一 一 市 市 市 市 (g) SL2Tr 二次側平均電壓 0 5 10 15 20 25 30 35 40 45 50 -1 -0.5 0 0.5 1 1.5 時時(秒) S L 1 A 相 市 相 (d) SL1 A 相電流 0 5 10 15 20 25 30 35 40 45 50 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時時(秒) S L 2 A 相 市 相 (h) SL2 A 相電流 圖 14 負載 SL1、SL2 系統變數變動情形
0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 1.2 時時(秒) S L 3 市 市 市 (a) SL3 實功率 0 5 10 15 20 25 30 35 40 45 50 -0.5 0 0.5 1 1.5 2 時時(秒) M 1 轉 機 (e) M1 轉矩 0 5 10 15 20 25 30 35 40 45 50 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 時時(秒) S L 3 市 市 市 (b) SL3 虛功率 0 5 10 15 20 25 30 35 40 45 50 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 時時(秒) M 1 轉 轉 (f) M1 轉速 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) S L 3 T r 二 一 一 市 市 市 市 (c) SL3Tr 二次側平均電壓 0 5 10 15 20 25 30 35 40 45 50 0 0.2 0.4 0.6 0.8 1 時時(秒) M 1 端 市 市 (g) M1 端電壓 0 5 10 15 20 25 30 35 40 45 50 -1.5 -1 -0.5 0 0.5 1 1.5 時時(秒) S L 3 A 相 市 相 (d) SL3 A 相電流 0 5 10 15 20 25 30 35 40 45 50 -6 -4 -2 0 2 4 6 時時(秒) M 1 A 相 市 相 (h) M1 A 相電流 圖 15 負載 SL3、M1 變數變動情形
參考文獻
參考文獻
參考文獻
參考文獻
Website, http://www.un.org Website, http://www.btm.dk/world-index.htm 第二次全國能源會議結論報告, 2005 年 6 月H. Sharma, S. Islam, C.V. Nayar, and T. Pryor, “Dynamic Response of a Remote Area Power System to Fluctuating Wind Speed,” IEEE Power Engineering Society Winter Meeting, Vol. 1, Jan. 2000, pp.499-504
K. Uhlen, B.A. Foss, and O.B. Gjosater, “Robust Control and Analysis of a Wind-Diesel Hybrid Power Plant,” IEEE Transactions on Energy Conversion, Vol. 9, Dec. 1994, pp.701-708
F.M.A. Ghali and S.H. Arafah, “Dyanmic Analysis of Hybrid Wind/Diesel System with Three-Level Inverter,” IEEE Power Conversion Conference, Vol. 2, April 2002, pp.727-732
E. Muljadi and H.E. McKenna, “Power Quality Issues in a Hybrid Power System,” IEEE Transactions on Industry Applications, Vol. 38, No.3, May/June 2002, pp.803-809
A. Consoli, S. Musumeci, A. Raciti, A. Leotta, and U. Nocera, “Hybrid Systems Long Term Simulation,” IEEE International Caracas Conference on Devices, Circuits and Systems, Dec. 1995, pp.266-270
R.C Bansal, T.S Bhatti, and D.P. Kothari, “Automatic Reactive Power Control of Wind-Diesel-Micro-Hybrid Autonomous Hybrid Power Systems Using ANN Tuned Static Var Compensator,” Large Engineering Systems Conference on Power Engineering, May 2003, pp.182-188
R. Sebastian, M. Castro, E. Sancristobal, F. Yeves, J. Peire, and J. Quesada, “Approaching hybrid wind-diesel systems and Controller Area Network,” IECON 02, Vol. 3, Nov. 2002, pp.2300-2305
J.T. Bialasiewicz, E.Muljadi, S. Drouilhet, and G. Nix,“Hybrid Power Systems with Diesel and Wind Turbine Generation,”Proceedings of the American Control Conference, June 1998, pp.1705-1709
T. Senjyu, T. Nakaji, K. Uezato, and T. Toshihisa, “A Hybrid Power System with using Alternative Energy Facilities in Isolated Island,” IEEE Transmission and Distribution Conference and Exhibition, Vol. 2, Oct. 2002, pp.954-959
B. Akins and R.G. Harley, The General Theory of Alternating Current Machines, Chapman and hall, 1975
J.R. Smith and M.-J. Chen, Three-Phase Electrical Machine Systems, Research Studies Press Ltd., 1993
J. Delesalle and I. Kauffmann, “Réponse Des Moteurs Diesel Suralimentés Aux Variations Rapides De Puissance Appelée Simulation Mathématique Et Applications,” CIMAC, A, 1977, Pap. A9 J.R. Smith, A.F. Stronach, and T. Tsao, “Digital Simulation of Marine Electro-Mechanical Drive
Systems,” IEEE Transactions on Industry Applications, IA-18, 1982, pp.393-399
Ltd., December 2001
J.F. Manwell, Wind Energy Explained, John Wiley& Sons Ltd., May 2002
P.C. Krause, Analysis of Electric Machinery and Drive System, 2nd Ed, McGRAW-Hill Book Co., USA, Dec 2001
C.-M. Ong, Dynamic Simulation of Electric Machinery using MATLAB/Simulink, McGRAW-Hill Book Co., USA, 1998
IEEE Committee Report, “Computer Representation of Excitation Systems,” IEEE Transactions on Power Apparatus and Systems, PAS-87, 1968, pp.1460-1464
IEEE Committee Report, “Excitation System Dynamic Characteristics,” IEEE Transactions on Power Apparatus and Systems, PAS-92, 1973, pp.1460-1464
IEEE Committee Report, “Excitation System Models for Power System Stability Studies,” IEEE Transaction on Power Apparatus and Systems, PAS-100, 1981, pp.494-509
IEEE Committee Report, “Computer Models for Representation of Digital-Based Excitation Systems,” IEEE Transaction on Energy Conversion, Vol.10, Issue 4, Dec. 1996, pp.706-713 Using Simulink, The Mathworks Inc., 2005
附錄
附錄
附錄
附錄 A 系統組件參數
系統組件參數
系統組件參數
系統組件參數
系統組件 DESG1, DESG2, DESG3 系統組件 WTIG1, WTIG2, WTIG3 額定功率 (kVA) 2500 額定功率 (kW) 1500 端電壓 (V) 4160 端電壓 (V) 575 額定頻率 (Hz) 60 額定頻率 (Hz) 60 額定線電流(A) 347.0 額定線電流(A) 1673 定子電阻 (pu) 0.009 定子電阻 (pu) 0.0106 定子漏電抗 (pu) 0.105 定子漏電抗 (pu) 0.14 d 軸磁化電抗 (pu) 2.095 磁化電抗 (pu) 3.82 q 軸磁化電抗 (pu) 1.875 轉子電阻 (pu) 0.0112 磁場電阻 (pu) 0.0021 轉子漏電抗 (pu) 0.109 磁場漏電抗 (pu) 0.146 慣性常數 (s-kW/kVA) 2.0 d 軸阻尼電阻 (pu) 0.0138 d 軸阻尼漏電抗(pu) 0.0928 q 軸阻尼電阻 (pu) 0.0220 q 軸阻尼漏電抗(pu) 0.0941 慣性常數 (s-kW/kVA) 1.78 系統組件 SGTr1, SGTr2, SGTr3 系統組件 WT1Tr, WT2Tr, WT3Tr 額定容量 (kVA) 2750 額定容量 (kVA) 1875 一次側電壓 (kV) 11.4 一次側電壓 (kV) 11.4 一次側額定線電流 (A) 139.3 一次側額定線電流 (A) 94.96 二次側電壓 (kV) 600 二次側電壓 (V) 575 二次側額定線電流 (A) 2646.2 二次側額定線電流 (A) 1883 一次側電阻 (pu) 0.0047 一次側電阻 (pu) 0.005 一次側漏電抗 (pu) 0.0280 一次側漏電抗 (pu) 0.0275 二次側電阻 (pu) 0.0047 二次側電阻 (pu) 0.005 二次側漏電抗 (pu) 0.0325 二次側漏電抗 (pu) 0.0275 磁化電抗 (pu) 40.00 磁化電抗 (pu) 30.50 連接型式 (pu) D-Yg 連接型式 (pu) D-Yg
系統組件 SL2Tr 系統組件 SL3Tr
額定容量 (kVA) 4000 額定容量 (kVA) 2500 一次側電壓 (kV) 11.4 一次側電壓 (kV) 11.4 一次側額定線電流 (A) 202.6 一次側額定線電流 (A) 126.6
二次側電壓 (kV) 600 二次側電壓 (kV) 380 二次側額定線電流 (A) 3850 二次側額定線電流 (A) 3798 一次側電阻 (pu) 0.0043 一次側電阻 (pu) 0.0040 一次側漏電抗 (pu) 0.0325 一次側漏電抗 (pu) 0.0300 二次側電阻 (pu) 0.0043 二次側電阻 (pu) 0.0040 二次側漏電抗 (pu) 0.0325 二次側漏電抗 (pu) 0.0300 磁化電抗 (pu) 40.00 磁化電抗 (pu) 35.0 連接型式 (pu) D-Yg 連接型式 (pu) D-Yg
系統組件 SL1 系統組件 SL2 實功率(MW) 1.0 實功率(MW) 3.8 虛功率(MVAR) 0.2 虛功率(MVAR) 0.6 系統組件 SL3 系統組件 SL4 實功率(MW) 2.0 實功率(MW) 10.0 虛功率(MVAR) 0.5 虛功率(MVAR) 1.0 系統組件 WT1Var 系統組件 WT2Var 虛功率(MVAR) 0.60 虛功率(MVAR) 0.60 系統組件 WT3Var 虛功率(MVAR) 0.60 系統組件 Motor 額定功率 (kW) 373 端電壓 (V) 380 額定頻率 (Hz) 60 額定線電流(A) 629.7 定子電阻 (pu) 0.0176 定子漏電抗 (pu) 0.0815 磁化電抗 (pu) 3.46 轉子電阻 (pu) 0.0176 轉子漏電抗 (pu) 0.0815 慣性常數 (s-kW/kVA) 1.05
![圖 1 市電併聯型柴油引擎-風能混合式發電系統 2.2 狀態空間表示法狀態空間表示法 狀態空間表示法 狀態空間表示法 狀態空間表示法(State-Space Representation)是利用一組首階的微分方程式來建立系統 組件甚至整個系統的動態模型。利用此方法可以將組件模組化後再進一步加以連結,如此, 可以使得研究的系統架構具有彈性而且多元化[13,14]。 利用狀態空間表示法,可以將系統組件表示成 [ ] [ ][ ] [ ][ ]p x =Ax + Bu (1) 其中[x]是 n 維的](https://thumb-ap.123doks.com/thumbv2/9libinfo/8832256.235694/3.892.85.810.134.570/市電併用一組以將化後再進一步加以連結如此可以系統組其中x是維的.webp)