行政院國家科學委員會專題研究計畫 期中進度報告
無人遙控潛器操控之虛擬環境模擬與建構(1/3)
計畫類別: 個別型計畫 計畫編號: NSC91-2611-E-110-007- 執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日 執行單位: 國立中山大學海下技術研究所 計畫主持人: 陳信宏 計畫參與人員: 楊宗頜、蕭毓宏、蔡一誠 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 92 年 6 月 2 日
行政院國家科學委員會補助專題研究計畫
□ 成 果 報
告 期中
進度
報告
無人遙控潛器操控之虛擬環境模擬與建構(1/3)
計畫類別: 個別型計畫 □ 整合型計畫
計畫編號:NSC 91-2611-E-110-007-
執行期間: 91 年 08 月 01 日 至 92 年 07 月 31 日
計畫主持人:陳信宏
共同主持人:
計畫參與人員:楊宗頜、蕭毓宏、蔡一誠
成果報告類型(依經費核定清單規定繳交):精簡報告 □完整
報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究
計畫、列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,一年□二年後可公
開查詢
執行單位:國立中山大學海下技術研究所
中 華 民 國 92 年 05 月 30 日
行政院國家科學委員會專題研究計畫期中進度
報告
無人遙控潛器操控之虛擬環境模擬與建構(1/3)
A Simulation Environment for Remotely Operated Vehicles
Operation (1/3)
計畫編號:NSC 91-2611-E-110-007
執行期限:91 年 8 月 1 日至 92 年 7 月 31 日
主持人:陳信宏 國立中山大學海下技術研究所
共同主持人:
計畫參與人員: 楊宗頜 國立中山大學海下技術研
究所
蕭毓宏 國立中山大學海下技術研
究所
蔡一誠 國立中山大學海下技術研
究所
一、中文摘要 本研究計畫擬發展一套具備多功能的 ROV 操作者使用介面,此介面可以模擬 ROV 所處之水下環境,並透過相關儀器整 合所提供之資訊,即時顯示 ROV 在水下 的絕對位置、ROV 相對於工作母船的位 置、以及 ROV 的運動方向和運動軌跡。 此外,此操作介面還具備 ROV 操作訓練 模擬器之功能,可以變更水下環境相關物 理參數、ROV 之幾何外型參數、以及布置 各類形的障礙物和結構物,操作者則可以 利用鍵盤、搖桿、以及滑鼠等輸入裝置下 達操控指令,而此介面則可根據指令以及 ROV 的動態模式來模擬 ROV 在水下之運動行為。 本計畫之時程為三年,第一年以發展 操控之虛擬實境介面顯示軟體、ROV 動態 數學模式、以及 ROV 操控訓練模擬人機 介面設計為主,第二年則進行壓力計、電 羅經、DGPS、水下聲納定位系統、掃瞄 聲納、動力模擬、位置計算、以及虛擬實 境顯示介面的軟體硬體整合,第三年則進 行 ROV 操控虛擬實境系統的實際海域測 試以及推進器推力參數的量測與數值計 算。目前正在執行第一年期計畫,進度上 已經完成了各系統的軟體建構,除此之 外,本研究更進一步發展 ROV 遠端操控 介 面 , 使 得 操 作 者 可 以 透 過 網 路 操 控 ROV。綜合言之,本研究計畫的進度不進 完全達成目標,更進一步完成其它相關應 用的開發。本研究之研發結果不僅可以減 輕 ROV 操作員的負擔、提供 ROV 操作員 作為操控訓練之用,更可以進一步利用此 一軟體介面與其他硬體相結合,來進行實 際海域相關量測實驗,例如測掃聲納掃 瞄。特別是台灣飛機失事頻繁,往往需要 利用 ROV 進行殘骸搜尋,此系統將有助 於提升搜尋效率。 關鍵詞:無人遙控潛器、虛擬實境、動力、 訓練模擬器、人機介面 Abstract
This project intends to develop a multi-function ROV operating man-machine interface which integrates all sensory data in real-time to yield a 3D navigation map for its operator. The 3D navigation map will be superposed as an HUD (head up display) on the top of the image transmitted back the forward looking inspection camera, therefore the operator does not need to switch between monitors and panels during operation. In addition to the real physical components connected to the system, we also want to develop a simulated virtual ROV in a virtual clustered environment. Given the geometrical and dynamic parameters of the ROV, and conditions of the ocean environment, the model will generate ROV’s corresponding motion
according to the commands of the trained-pilot. Keyboard, joystick and mouse will be used as input devices for the system. So we can train the pilot systematically and progressively.
We plan to conduct the project in three years. The major tasks for the first year are mostly software engineering. It includes developing an underwater VE (Virtual Environment), dynamics of ROV and computer-aided ROV training simulator. For the second year, depth sensor, gyrocompass, DGPS, and tracking system will be integrated and implemented to the simulator developed in the previous year. Last, but not least, all the sub-systems will be put together, and field tests will be carried out to verify the performance of our system. At this time, the first year project is so successful that all planned works have been conducted and finished. Furthermore, a ROV operating interface which integrates internet-based remote-operating and 3D display abilities has been developed, too. Conclusively, all the works we have finished meet the schedule totally. We expect to see this application-oriented research project not only provide a flexible but rigorous training tool for our underwater salvage industries, but also a step-by-step training process for the participating graduate students as well.
Keywords: ROV, virtual environment
dynamic, training simulator, man-machine interface 二、緣由與目的 ROV 的工作環境特殊,操作者大都只 能依靠裝設於 ROV 本身的感測儀器及攝 影機所顯示的資訊及操作人員的經驗來判 斷 ROV 的約略位置,但是往往因為資料 過於稀少或是資訊的整合不易,常使得操 作員做出錯誤的判斷。例如 1999 年德基水 庫失事直昇機之搜尋,操作員只能依靠經 驗以及 ROV 的攝影機所提供的影像來判 斷 ROV 之位置,並下達操作命令[1]。但 是因為水庫底部污泥混濁,使得攝影機的 視野大受影響,而且因為不知道 ROV 的
移動軌跡,所以常重複偵測相同的區域, 浪費了許多寶貴的時間及人力。一般 ROV 裝設的感測儀器,僅限於深度計及電羅 經,欲定位出 ROV 所處的位置,還必須 結合水下定位系統。此外,這些感測器所 提供的資料,通常是以數字或是簡單的圖 示儀表來顯示,因此操作員必須整合所有 一維或二維的資訊,轉換成 ROV 的 3D 的 狀態,才能得知 ROV 與操作者之間的相 對位置,這也使得 ROV 的操作變得更加 困難。另一方面,只仰賴攝影機傳達的畫 面資訊來操控 ROV,並不容易達到熟練的 操控技術,大部分的 ROV 操作員,都是 藉由長時間的實務演練才得以熟稔儀器的 操作與 ROV 的控制,但是 ROV 的實務操 作經驗取得必須經由實際水域操作來累 積,受限於實地操練所需的時間、空間、 大量花費、後勤支援、以及丟失貴重 ROV 的風險,大部分的操控經驗都是從工作中 累積得來的,所以具備一套安全、有效率、 又節省成本的 ROV 操作訓練系統是有其 必要性的。此外,在某些特殊情形下,科 學或工程人員可能無法親自到達現場操作 ROV,或是在搜救時,儀器均已運達現 場,但是操作人員卻無法及時趕到現場, 此時 ROV 操作介面若具備遠端遙控功 能,就可以解決這些問題。有鑑於此,本 研究計畫之目的擬發展一套具備多功能的 ROV 操作者使用介面,而此系統介不僅可 以模擬 ROV 所處之水下環境,並透過相 關儀器整合所提供之資訊,即時顯示 ROV 在水下的絕對位置、ROV 相對於工作母船 的位置、以及 ROV 的運動方向和運動軌 跡等資訊,此外,此介面可以作為 ROV 的操作訓練模擬器,用以模擬水下虛擬環 境、變更水下環境相關物理參數(例如流 速、背景光線、能見度、光線散射與吸收 等等)、ROV 之幾何外型參數(尺寸、重 量、阻力係數、附加質量係數)、以及布置 各類形的障礙物和結構物,操作者則可以 利用鍵盤、搖桿、以及滑鼠等輸入裝置下 達操控指令,而此介面則可根據指令以及 ROV 的動態模式來模擬 ROV 在水下之運 動行為。 虛擬實境在海洋工程上也是可以扮演 相當重要的角色的,可是一直到幾年前, 虛擬實境在海洋工程領域的相關應用還是 相當少見的,例如在近海工業(起重浮台、 鑽由平台、海下結構物)上往往僅利用二 維的表示方式來顯示船舶在電子海圖上的 位置,直到最近才有相關研究利用虛擬場 景的模擬與相關儀器的配合來進行水下作 業 [2, 3],以改善儀器操作人員對時間和 空間的感知能力,同時也可以節省成本與 避免不必要的危險發生。除此之外,虛擬 實 境 在自 主式 潛器 ( AUV, Autonomous Underwater Vehicles)的系統發展與模擬上 扮演相當重要的角色,這是因為自主式潛 器的發展日益複雜,在理論設計與實際應 用上往往存在很大的差距,雖然目前相關 的研究相當多,但是僅有少數的 AUV 能 實際運作,而且其功能也受限頗多,主要 的因素包括了價格昂貴、硬體與軟體的整 合困難、系統診斷困難、實海域測試耗費 成本、以及實際海域測試有遺失儀器的風 險。所以為了要能快速地診斷系統的錯 誤,同時提高系統的強健性,建立一套安 全、有效率、而且節省成本的 AUV 模擬 系統是非常重要的,所以當前虛擬實境在 水下技術的相關應用上,大部分集中於 AUV 系統整合與軟體發展為主 [4-10]。這 些 AUV 虛擬實境的發展,主要是利用網 路以及分散式運算架構的輔助,連結各地 的相同或不同的 AUV 透過網路直接進行 AUV 系統的試驗與模擬,如此一來便可免 於硬體搬運所需耗費的成本,所以大部分 的系統架構都是利用 JAVA 結合 VRML 建 構出來的,而且主要在於強調系統透過網 路溝通的能力以及感測器(聲納、深度、 影像、羅盤)模擬的能力,不過人機介面 的設計和測試本身就相當困難,特別是要 驗證此系統的有效性更是得耗費大量的迭 代運算過程,所以就有些研究提出 Hybrid Simulation Environment 或 是 Synthetic World 的概念 [11, 12],在所建立的模擬環 境中,一部分的子系統是真實的,另一部 份的子系統則是完全虛擬建構出來的,模 擬系統則可將實際感測得到的資訊與虛擬
感測得到的資訊結合,如此便可節省設計 AUV 之人機介面發展所需的時間。不過由 於 AUV 與 ROV 的操控特性畢竟不一樣, 所以這些應用於 AUV 的人機介面發展較 著重於跨平台、以及展示 AUV 在空間中 的動態模擬,不像 ROV 與操作者之間有 相當密切的互動,所以上述這些 AUV 虛 擬測試系統在人機互性動上的研究則著墨 甚少。 在 ROV 的操控及訓練上,利用虛擬 實境也可以增加 ROV 的操控效率。例如 在 1995 年 Kuroda 等人於研究室中架構了 一 個 虛 擬 的 水 下 環 境 [12] , 用 來 測 試 Twin-Burger 於水中的效能,因為 ROV 的 操控成果均直接記錄於電腦中,所以可以 很方便迅速的了解其性能。1997 年,Pioch 等人為特定的 ROV「Talon」開發了一套 操 控 訓 練 系 統 [13] , 此 系 統 利 用 Open Inventor 來架構虛擬實境,並設定了不同 等級的操作訓練課程。此外,Wang 等人 在 2000 年也利用 LabVIEW 建構了一套水 下載具的操作訓練和控制系統 [14],此系 統強調的重點並不是在虛擬場景的建立, 而是強調其具有力量回饋控制功能,藉由 Microsoft 動力回饋式搖桿來模擬操作水 下載具碰撞障礙物時所產生的震動效果, 不過此系統的最大缺點是沒有計算水下載 具的動態模式,所以無法確實呈現水下載 具被操作時的動態行為。 綜合上述這些相關研究結果顯示,目 前並沒有一套兼具虛擬場景模擬、操控訓 練、以及動態模式考量的 ROV 操作訓練 介面,這也是本計畫所要達到的目標。 三、研究規劃 本研究計畫第一年的工作主要規劃為 三部分,其目標是完成各子系統的軟體建 構。第一部份是建立 ROV 操控之虛擬實 境介面顯示軟體,第二部分是建立 ROV 動態數學模式,第三部分則是 ROV 操控 訓練模擬介面的設計。在 ROV 操控之虛 擬實境介面顯示軟體建構方面,本研究利 用免費的 OpenGL 圖形資料庫來建立所需 之虛擬場景、ROV 幾何外型、水下環境 參、以及海底地形,同時進行虛擬環境顯 示介面之規劃與建立,包括 ROV 狀態資 料顯示、操作者觀測位置切換與視角切 換、以及 ROV 歷史軌跡呈現。在 ROV 動 態模式的建立方面,首先推導 ROV 動態 數學方程式,同時量測 ROV 的相關參數 值(質量、重心、浮心、推進器位置…等 等),並利用 Runge-Kutta-Fehlberg method 撰寫程式來求動態方程式之數值解,之後 再利用數值積分技巧計算出 ROV 的瞬時 位置座標。在 ROV 操控訓練模擬介面設 計方面,本研究利用 Borland C++ Builder 建立 ROV 參數設定、環境參數設定、感 測資訊設定、以及 ROV 歷史軌跡記錄。 為了使虛擬實境達到擬真的程度,並 降低電腦的運算負荷,以完成虛擬實境的 場景建構、互動運算、以及圖形顯示等所 有 功 能 , 所 以 本 計 畫 採 用 分 散 式 運 算 (Distributed computation)的概念來發展 整體的系統架構,圖 1 為本計畫規劃發展 之硬體架構,圖 2 則為本計畫規劃發展之 軟體架構。在圖 1 的硬體架構中,可以區 分為「真實世界」與「虛擬世界」兩大部 分。真實世界的目的是為了確實掌握 ROV 在 水 下 的 行 蹤 , 所 採 用 的 硬 體 主 要 是 ROV、工作母船、GPS 以及專責進行位置 計算的電腦,ROV 上搭載的儀器設備有攝 影機、壓力計、電羅經、以及水下聲納定 位系統。虛擬世界的目的則是為了訓練 ROV 的操控技能,所採用的硬體主要是鍵 盤、搖桿、以及滑鼠等操控指令輸入裝置 以及專責 ROV 動態模式數值分析的電 腦。在軟體發展架構方面,本計畫利用 Windows 平 台 配 合 C++ 程 式 語 言 與 OpenGL 來進行系統介面之建構,此外, 在虛擬場景的資料輸入介面方面,ROV 所 拍攝的影像可以藉由 RF 電纜傳送至虛擬 場景中,而經由 ROV 運動模擬所得之 ROV 座標與相關場景參數設定,都可藉由 RS232 傳至虛擬實境輸出顯示介面中。
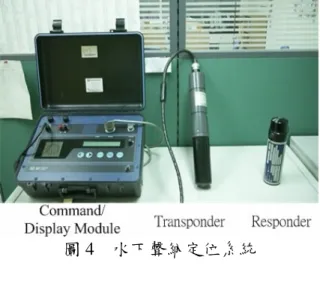
運動模擬 RF RS 232 磁羅經 壓力計 水下聲納定 位系統--Transponder GPS 攝影機 水下聲納定 位系統 Hydrophone 工作母船 ROV ROV操控器 Virtual World Real World RS 232 磁羅經 虛擬場 景展示 圖 1 系統硬體架構 RS232 傳輸設定 RF傳輸設定 ROV 位置計算 Windows作業系統 C++語言 OpenGL 虛擬場景 影像傳輸 ROV 控制系統 ROV 運動模擬 場景 參數設定 RS232 傳輸設定 圖 2 以 C++語言為基底之系統軟體架構 除了本計畫原先規劃發展之項目外,本計 畫額外探討 ROV 操作介面兼具多人遠端 遙控的功能的發展性,所以本計畫利用 JAVA 與 OpenGL 建立一套 ROV 操作介面 [15],讓使用者可以透過網際網路來操控 ROV 完成預定的工作,其系統架構如圖 3 所示。 四、研究成果 本計畫第一年規劃進行 ROV 操控之 虛擬實境介面顯示軟體建構、建立 ROV 動態數學模式、以及設計 ROV 操控訓練 模擬介面等三部分,迄今皆已完成,而且 更進一步發展出 ROV 之遠端操控介面。 以下各節就本計畫執行之相關成果一一做 詳細介紹。 IBM 相容型 麥金塔 II IBM 相容型 瀏覽器 瀏覽器 瀏覽器 瀏覽器 JAVA & GL4Java JAVA & GL4Java JAVA & GL4Java JAVA & GL4Java 筆記型電腦 Client端 Server端 ... RS-232 網際網路(Internet) JAVA 船艏向資料 (磁羅經) 船定位資料 (DGPS) ROV水下定位資料 (Tracking System) ROV深度與 方位資料 工作站伺服器 圖 3 以 JAVA 語言為基底之遠端操控系 統架構 (一)儀器設備整合 配合本研究之進行,本計畫整合之主 要儀器包括了水下聲納定位系統、全球衛 星定位系統、ROV、以及磁羅經等,以下 針對各儀器的功能以及配合使用情形做進 一步詳細敘述。 1. 水下聲納定位系統 水 下 聲 納 定 位 系 統 之 硬 體 設 備 包 括 Command/Display Module、Hydrophone 及 Transponder-Responder,如圖 4 所 示。其操作方式是利用超短基線定位原 理來發射及接收聲波訊號,藉由聲音的 物理特性計算出待測物之位置。此套系 統的角度量精度為 5°,距離量測的精 度為±1 公尺,而距離解析度為 0.3 公 尺。儀器所提供的資料包括了 ROV 與 船艏向的方位角,Hydrophone 與 Responder 的俯角,Hydrophone 與 Responder 的直線距離 SR,再配合 ROV 壓力計提供的水深資料,即可定位出
圖 4 水下聲納定位系統 圖 5 水下聲納定位系統量測 ROV 與母船之間的相對位置,如圖 5 所示。 2. 全球衛星定位系統 此操控系統使用中山大學海研三號研 究船上裝設的差分式全球衛星定位系 統(FURUNO GP-30/35 GPS Navigator) 來定位工作船的位置,此定位系統透過 RS-232 即可與 ROV 操控系統連結。 3. ROV 本 操 控 系 統 欲 連 結 的 ROV 之 一 為 Inuktun Services Ltd. 製造之 Seamor ROV,如圖 6 所示。Seamor ROV 作業 水深可達 300 公尺,配備有 100 瓦的燈 光以及 460 條電視解析度的彩色攝影 機。此外,ROV 還配備壓力計與磁羅 經,可提供 ROV 的深度及方位資訊, 而這些資料可透過 RS-232 傳輸介面與 ROV 操控系統連結。 圖 6 Seamor ROV 4. 磁羅經 水 下 定 位 系 統 提 供 的 方 位 角 為 Responder 與船艏之夾角,因此要將水 下定位系統量得的 ROV 定位資料轉換 為二度分帶座標下的絕對位置,還必須 得知工作船船艏之方向,因此,本系統 利用裝設於工作船上之 KHV 磁羅經來 量測船艏的角度,而 KHV 磁羅經的資 料輸出可透過 RS-232 傳輸介面與 ROV 操控系統連結。 (二)建立 ROV 實體模型 傳統的 ROV 操控介面是以數字呈現 ROV 在水下的深度與運動方向,但是在虛 擬操控介面中,則可將這些資訊以圖像方 式來呈現,特別是以實體模型的方式呈現 更能讓操作者直覺判斷出 ROV 的運動狀 態。所以本計畫依照 Seamor ROV 的實際 幾何尺寸,利用 C++語言與 OpenGL 繪製 出它的三維實體模型,如圖 7 所示,此一 實體模型將與台灣海岸輪廓、台灣周遭海 底地形、以及工作船實體模型共同整合於 ROV 之操控虛擬環境中,讓操作者如身歷 其境。 (三)建立工作船實體模型 如同 ROV 實體模型對操作員的重要 性,工作船在虛擬環境中呈現的外型也會 影響操作員對實際狀況的判斷。由於 ROV 隨時在運動,工作船也不見得固定不動, 所以工作船與 ROV 之間的相對位置也隨 時在改變,尤其操作員往往位於船上來操 控 ROV,如果操作員無法隨時掌握 ROV 相對於工作船的位置向量,將難以掌握
圖 7 利用 OpenGL 所繪製之 Seamor ROV 實體模型 ROV 的動向。若能藉由虛擬實境同時 呈現工作船與 ROV 的相對空間位置,將 有助於操作員對 RO V 的操控。因此,本 計畫依照海研三號的實際幾何尺寸,利用 C++語言與 OpenGL 繪製出它的三維實體 模型,如圖 8 所示,此一實體模型也將被 整合於 ROV 之操控虛擬環境中。 (三)台灣周遭海域地形 操作員操控 ROV 所面對的困境之一 是無法掌握 ROV 周遭環境的地形資料, 所以傳統操控 ROV 的方式僅能憑藉水下 攝影機傳回的視訊畫面來判斷周遭環境的 地理資訊,這種操控方式在水質清澈且光 源充足的環境下還不至於造成太大的操控 困難度,然而一旦水質混濁或是光線不 足,操作員就必須極其小心謹慎、步步為 營,以免錯失搜尋目標或是與其他物體發 生擦撞。如果虛擬操控介面可以呈現 ROV 的實際位置以及當地確實的海底地形, 圖 8 利用 OpenGL 所繪製之海研三號研 究船實體模型 ROV 的操控就可以免於作業環境之水質 濁度和光源限制,而透過虛擬實境忠實呈 現 ROV 與周遭地形的相對位置,使得操 作員可以輕鬆操控 ROV 的運動。因此, 本計畫根據海科中心免費提供的地形深度 資料,利用 C++語言與 OpenGL 繪製出它 的三維曲面模型,如圖 9 所示。此一實體 模型也將被整合於 ROV 之操控虛擬環境 中。 (四)ROV 運動軌跡顯示 利用 ROV 進行水下物體搜尋時所面 臨的問題之一,是不知道究竟哪個區域是 否已經搜尋過,為了克服這個問題,操作 介面將必須具備 ROV 航行軌跡顯示與記 錄之功能,讓操作者清楚知道哪些區域已 經搜尋過,哪些區域尚未被搜尋。所以本 計畫利用 OpenGL 來發展此功能介面,如 圖 10 所示。本介面除了將 ROV 運動軌跡 以二維軌跡線呈現之外,還配合深度資料 將軌跡線以不同的顏色呈現,圖 10 右側的 Colorbar 與數字即是顯示各種不同深度所 代表的顏色,而且操作員可以任意變更 Colorbar 所代表的深度範圍,操作員只要 根據軌跡線所顯示的顏色變化就可以瞭解 ROV 在任一軌跡點所處的深度。此外,此 介面除了顯示 ROV 運動軌跡之外,也顯 示了船與 ROV 的相對位置,同時以船為 中心顯示繪製等距同心圓,操作員可以選 擇顯示或隱藏同心圓,同心圓之間距也可 以由操作員自由調整,藉此瞭解 ROV 與 工作船之間的距離。 (五)實海域虛擬環境操控介面 依據上述所建立之 ROV 實體模型、 工作船實體模型、台灣周遭海域地形、以 及 ROV 運動軌跡顯示介面,本計畫將之 整合成 ROV 之實海域虛擬環境操控介 面,此操控介面主要包含四塊顯示面板, 如圖 11 所示。位於介面左上方的第一塊面 板,用於呈現 ROV、工作船、以及台灣周 遭海域地形的實體模型,同時也呈現這三 者之三度空間相對位置,在此面板內,操
圖 9 利用 OpenGL 繪製之台灣周遭海域 地形圖 圖 10 ROV 運動軌跡之紀錄與顯示介面 作員可以依照喜好或是實際操作狀況調整 此面板內的顯示狀態,包括上下左右移動 (Pan)顯示場景、縮放(Zoom)顯示場景、 以及動態旋轉顯示場景,以得到最佳的觀 測角度。位於介面右上方的第二塊面板, 則是 ROV 運動軌跡顯示介面,其功能如 第(四)小節所述。位於最右側的面板, 其作用是即時顯示 ROV 的作業深度。位 於中間下方的面板,則是用於即時顯示 ROV、工作船以及其他儀器的狀態資料, 包括 ROV 運動方向、船艏方位、ROV 二 度分帶座標、GPS 經緯度座標與二度分帶 座標、以及水下定位系統測得的斜距、方 位角、俯角、以及 Transponder 回傳的深 度資料。位於最下方的面板則用於顯示操 控模式(實水域或是模擬訓練)、以及相關 儀器設定,同時也顯示 RS232 接收 GPS 和水下聲納定位系統的原始資料。 圖 11 實海域虛擬環境操控介面 (六)虛擬環境操控訓練介面
虛擬環境操控訓練介面也是整合 ROV 實體模型、工作船實體模型、台灣周 遭海域地形、以及 ROV 運動軌跡顯示介面而成,如圖 12 所示。此操控訓練介 面與實海域虛擬環境操控介面幾乎相同,主要不同之處在於左上方用於呈現 ROV 實體模型、工作船實體模型、台灣周遭海域地形、以及三者空間相對位置 的顯示面板。在此顯示面板內,操作員仍然可以依照喜好或是實際操作狀況調整 此面板內的顯示狀態,包括移動、縮放、以及動態旋轉顯示場景,以得到最佳的 觀測角度。此外,在實海域虛擬環境操控介面中,ROV 的位置是由整合 GPS、 水下聲納定位系統、磁羅經以及深度計之資料所決定,在此虛擬操控訓練介面 中,ROV 的位置則是利用動態數學模式建構出來的,使用者可以透過搖桿來操 控 ROV 的運動,藉由改變搖桿的操作位置以及其他按鈕來模擬推進器的推力大 小。此外,使用者也可以透過鍵盤和滑鼠來變更水下作業環境模擬狀況,包括選 擇操控訓練場景、變更海底地形材質、調整水下能見度、調整水下環境照度、選 擇打開或關閉 ROV 的照明燈光等功能。這些功能的建構,都可以利用 OpenGL 繪圖函式來達成。 (七)遠端操控介面 由於同一時間可能有數台 ROV 於同一區域作業,在操作者溝通不良下極容 易導致 ROV 彼此發生碰撞,或是在特殊情況下,操作員無法親臨現場操控,必須 利用遠端操控 ROV。所以本計畫利用 Java 程式語言與 OpenGL 繪圖函式庫建立一 套 ROV 操控介面,如圖 13 所示。此介面之系統架構可分為 Server 端與 Client 端,兩者藉由網際網路通訊,以達成多人連線與遠端遙控的功能。由於 ROV 操 控系統乃架構於網際網路的平台下執行,所以本系統利用 Server 來整合 ROV 定 位所需要的資訊(如深度、航向、母船位置、船艏方位等),Server 主要功能如 下: 1. 與 ROV 磁羅經、GPS、水下定位系統等儀器作溝通,整合 ROV 水下定位資 料與 GPS 資料,將資料傳至操作者之個人電腦,並提供 Client 端所有 ROV 之絕對位置。
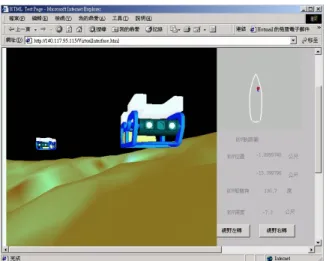
圖 12 虛擬環境操控訓練介面 圖 13 利用 Java 發展之遠端操控介面 2. 提供操作地點之地形資料庫。 3. 紀錄 ROV 各項操作資訊,紀錄檔案包括工作船之 GPS 位置、船艏方位、ROV 位置之二度分帶座標和 ROV 方位等各項資訊以及操作者登錄名稱等。 至於 Client 端,則可讓操作者從個人電腦下達命令操控 ROV,其功能如下: 1. 顯示 ROV 之 3D 操控介面。
2. 顯示 ROV 於水中的狀態,包括與其他 ROV 之距離、ROV 之航向、ROV 之 作業軌跡等。 3. 下達 ROV 前進、後退、上升、下降、左轉及右轉等指令。 五、結論 本研究計畫第一年的工作目標是完成 ROV 虛擬環境操控子系統的軟體建 構,包括建立 ROV 操控之虛擬實境介面顯示軟體、建立 ROV 動態數學模式、 以及設計 ROV 操控訓練模擬介面。本計畫執行迄今皆不僅達成上述工作目標, 完成本年度預定進度之百分之百,而且本計畫還進一步額外開發出網際網路架構 下之 ROV 遠端操控介面。綜合言之,本計畫進行開發之 ROV 虛擬環境操控介 面已經完成軟體發展與介面整合,其操作功能可達成: 1. 呈現 ROV、工作船、以及台灣周遭海域地形的實體模型,同時也呈現這三者 之三度空間相對位置。 2. 上下左右移動、縮放、以及動態旋轉顯示場景,以得到最佳的觀測角度。 3. 以二維軌跡線呈現 ROV 運動軌跡,並配合深度資料將軌跡線以不同的顏色呈 現,同時也可以記錄運動軌跡。 4. 即時顯示 ROV 運動方向、船艏方位、ROV 二度分帶座標、GPS 經緯度座標
與二度分帶座標、以及水下定位系統測得的斜距、方位角、俯角、以及 Transponder 回傳的深度資料。 5. 顯示操控模式(實水域或是模擬訓練)以及相關儀器設定,同時也顯示 RS232 接收 GPS 和水下聲納定位系統的原始資料。 6. 藉由改變搖桿的操作位置以及其他按鈕來模擬推進器的推力大小,並利用動 態數學模式來模擬 ROV 的運動,作為操控訓練之用。 7. 允許使用者選擇操控訓練場景、變更海底地形材質、調整水下能見度、調整 水下環境照度、選擇打開或關閉 ROV 的照明燈光等功能,以進行 ROV 操控 訓練。 8. 遠端操控介面透過網際網路達成了多人連線與遠端遙控之功能,而且此操控 系統可同時整合數台 ROV 的資訊,即時更新 Client 端所有 ROV 的位置,減 少 ROV 彼此發生碰撞的可能性。 第二年度之計畫將運用第一年所發展的軟體介面,進行儀器設備與軟體之整合。 整合的儀器包括 ROV、GPS、磁羅經、水下聲納定位系統、以及掃描聲納,由 於今年計畫之儀器設備費經刪減後, ROV 附屬設備「掃描聲納」因經費不足而 無法採購,為了系統發展的完整性,期許第二年的儀器設備費可以增加採購掃描 聲納的費用。 八、參考文獻 [1] 薛憲文、莫顯蕎、王兆璋、陳信宏、楊光哲,多音束測深系統及水下遙控載具與水下搜尋 技術之探討-以德基水庫失事 AH-1W 直昇機為例,海下技術季刊,第九卷第三期,7-14 頁,1999 年。
[2] X. Wang, G. Seet, M. Lau, E. Low, and K. C. Tan, “Exploiting Force Feedback in Pilot Training and Control of an Underwater Robotics Vehicle: an Implementation in LabVIEW,” OCEANS
2000 MTS/IEEE Conference and Exhibition, 11-14 Sept. 2000, Providence, RI, USA, Vol. 3, pp.
2037-2042, 2000.
[3] P. Chapman, P. Stevens, D. Wills, and G. Brookes, “Real-Time Visualization in the offshore Industry,” IEEE Computer Graphics and Applications, Vol. 21, No. 4, pp. 6-10, 2001.
[4] D. Brutzman, “Virtual World Visualization for an Autonomous Underwater Vehicle,”
OCEANS ’95 Conference Proceedings, 9-12 Oct. 1995, San Diego, CA, USA, Vol. 3, pp.
1592-1600, 1995.
[5] D. Gracanin, K. P. Valavanis, N. C. Tsourveloudis, and M. Matijasevic, “Virtual-Environment -Based Navigation and Control of Underwater Vehicles,” IEEE Robotics and Automation
Magazine, Vol. 6, No. 2, pp. 53-62, June 1999.
[6] Y. Pang, Y. Shang, and Y. Xu, “Software Design Techniques for the Man-Machine Interface to Autonomous Underwater Vehicles,” Proceedings of the 1998 International Symposium on
[7] S. K. Choi, S. A. Menor, and J. Yuh, “Distributed Virtual Environment Collaborative Simulator for Underwater Robots,” Proceedings of the 2000 IEEE/RSJ international Conference on
Intelligent Robots and Systems, 31 Oct.-5 Nov. 2000, Takamatsu, Japan, Vol. 2, pp. 861-866,
2000.
[8] S. K. Choi and J. Yuh, “A Virtual Collaborative World Simulator for Underwater Robots Using Multi-Dimensional Synthetic Environment,” Proceedings of the 2001 IEEE International
Conference on Robotics and Automation, 21-16 May 2001, Seoul, South Korea, Vol. 1, pp.
926-931, 2001.
[9] P. Ridao, J. Batlle, J. Amat, and M. Carreras, “A Distributed Environment for Virtual and/or Experiments for Underwater Robots,” Proceedings of the 2001 IEEE International Conference
on Robotics and Automation, 21-16 May 2001, Seoul, South Korea, pp. 3250-3255, 2001.
[10] C. Deltheil, L. Didier, E. Hospital, and D. P. Brutzman, “Simulating an Optical Guidance System for the Recovery of AN unmanned Underwater Vehicle,” IEEE Journal of Oceanic Engineering, Vol. 25, No. 4, pp. 568-574, October 2000.
[11] M. Innocenti and L. Pollini, “A Synthetic Environment for Simulation and Visualization of Dynamic Systems,” Proceedings of the 1999 American Control Conference, 2-4 June 1999, San Diego, CA, USA, Vol. 3, pp. 1769-1773, 1999.
[12] Y. Kuroda, K. Aramaki, T. Fujii, and T. Ura, “A Hybrid Environment for the Development of Underwater Mechatronic Systems,” Proceedings of the 1995 IEEE IECON, International
Conference on Industrial Electronics, Control, and Instrumentation, 6-10 Nov. 1995, Orlando,
FL, USA, Vol. 1, pp. 173-178, 1995.
[13] N. J. Pioch, B. Roberts, and D. Zeltzer, “A Virtual Environment for Learning to Pilot Remotely Operated Vechicles,” Proceedings of the VSMM ’97, International Conference on Virtual System
and Multimedia, 10-12 Sept. 1997, Geneva, Switzerland, pp. 218-226, 1997.
[14] X. Wang, G. Seet, M. Lau, E. Low, and K. C. Tan, “Exploiting Force Feedback in Pilot Training and Control of an Underwater Robotics Vehicle: an Implementation in LabVIEW,” OCEANS
2000 MTS/IEEE Conference and Exhibition, 11-14 Sept. 2000, Providence, RI, USA, Vol. 3, pp.
2037-2042, 2000. [15] 陳信宏、王兆璋、楊宗頷、蕭毓宏,水下無人遙控潛具之遠端操作介面發展,第五屆水下 技術研討會暨國科會成果發表會,高雄,249-254 頁,2003 年。 誌謝 本研究承行政院國家科學委員會之經費贊助(NSC91-2611-E-110-007)得以順利進 行,僅此致謝。