國
立
交
通
大
學
資訊科學與工程研究所
碩
士
論
文
車 載 網 路 環 境 中 以 覆 蓋 節 點 作 機 率 型 轉 送 決 定
Probability-based Forwarding Decision for Covered Nodes in
VANETs
研 究 生:林晏蔚
指導教授:趙禧綠 教授
車載網路環境中以覆蓋節點作機率型轉送決定
Probability-based Forwarding Decision for Covered Nodes in VANETs
研 究 生:林晏蔚 Student:Yen-Wei Lin
指導教授:趙禧綠 Advisor:Hsi-Lu Chao
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science July 2010
Hsinchu, Taiwan, Republic of China
車載網路環境中以覆蓋節點作機率型轉送決定
學生:林晏蔚
指導教授:趙禧綠
國立交通大學資訊科學與工程研究所碩士班
摘要
隨著車用行動通訊網路進步,帶動智慧型運輸系統的發展。車載網路以無線通訊與 資料傳輸技術互相交換訊息,如果訊息能有效率地散佈,將有助於提供駕駛人一個舒適 又安全的行車環境。例如路況資訊可提供駕駛人避開擁擠或車禍的路段,除此之外,還 能分享其他多媒體服務資訊、廣告,給有興趣的駕駛人接收資訊。 最能實現快速與廣度散佈訊息的方式即為廣播。藉由多躍式重複廣播,盡可能的 將訊息告知網路上所有的節點。由於傳統的廣播方式容易造成多餘訊息與網路擁塞問題, 故如何選擇適當的節點將訊息重複傳送,是廣播時需考慮的重點。 在已提出的廣播方法中,偏好選擇邊界節點為轉送者,不僅減少多餘訊息,更能 提高轉送後的覆蓋範圍。但車用網路有著高速移動的特性,邊界節點容易因移動而脫離 傳輸範圍,特別是多段距離以外的鄰居節點。針對拓樸環境變動迅速的車用網路,本篇論文提出 Nodes Covered Forward (NCF), 藉由標計已傳送訊息的鄰居與邊界覆蓋節點的移動性,轉送者可決定是否重傳訊息。此 方法可提高邊界結點的接受率,穩定 邊界覆蓋邊界節點。同時以機率方式減少冗贅資訊, 並且保持一定的傳達度。比起其他的廣播方法,我們的方法能夠減少 97%以上的多餘訊 息,以及平均 93%的傳達率。
ii
Probability-based Forwarding Decision for Covered Nodes in VANETs
Student: Yen-Wei Lin Advisor:Hsi-Lu Chao
Institute of Computer Science and Engineering National Chiao Tung University
Abstract
The growing of Vehicular Ad Hoc Network (VANET) improves the development of Intelligent Transport System. With wireless transmissions and data dissemination technology in vehicular network, vehicles can exchange information to each other. If the information can be transmitted efficiently, it will be helpful for drivers to get secure and comfortable driving environment. For example, the road condition can help drivers to avoid traffic congestion or accident path. Furthermore, multimedia data and advertisement can be shared by on-road services to the interested drivers.
The most efficient and fast method to transmit data is broadcast. By multi-hop rebroadcast, messages can be disseminated to entire network nodes as many as possible. Because conventional broadcast could cause many redundant messages and network congestion problem, how to select appropriate nodes to rebroadcast messages is a key point when broadcast data.
Many proposed broadcast method favor border nodes to be forwarders. In the case, not only redundant messages can be reduced, but also increase the message coverage. However, because of the high mobility characteristic of vehicular network, border nodes will easily move out the transmission range of forwarder, especially many hops away neighbors.
For the high mobility nature of vehicular network, the nodes covered forward (NCF) method is proposed in this thesis. With marked neighbor nodes which send messages and the mobility of border nodes, forwarders can decide whether to rebroadcast messages. In the forward method, we can increase the acceptation ratio of borders and cover the border nodes stably. In the meantime, NCF can also reduce redundant messages with probability and keep a good notified ratio. Comparing with the other broadcast protocol, our NCF method can reduce about 97% redundant messages and achieve more 93% on average notified ratio.
致謝
碩士兩年的時光感覺過得非常快,從適應交大的環境開始,到修課、當助教 、計劃、 打工,學到很多東西、技術,也認識很多人,不論是人、事、物都有值得我學習的地方。 雖然礙於行動跟體力的不方便,但受過這麼多的幫助之後總覺得身體的障礙也不再是障 礙。學得越多也越發現自己的不足,覺得自己要更謙虛,虛心求教,並主動積極的找出 答案與解決方法。 我要感謝我的指導教授趙禧綠老師,老師會適時的提出想法上的盲點並給予指正, 讓我在研究的過程中有很多的啟發與感想。雖然過程中常常誤解彼此的意思,但老師依 然耐心的說明與指導,讓我在研究之路上也不致怯步。 老師常常會舉辦聚餐讓大家在一起吃飯,聊聊生活上的心得,使得研究生活特別有 趣。也感謝老師允許我在研究之餘還可以打工學習經驗,在系計中的打工讓我學到很多 務實的技術,能夠在自己的領域上學以致用,又可磨練自己,學習新知,認識新朋友, 讓我覺得碩士生活過得十分充實與豐富。 感謝實驗室的同學們與學弟妹、學長姐,大家都會在小細節上彼此關心,相處融洽, 也感謝已經畢業的民翰學長,閒暇的時候會教導我一些觀念與技巧,讓我在研究的過程 中非常受用,幫助很大。也希望實驗室的大家畢業後都能成就非凡,鴻途大展。 感謝我的父親與親戚朋友們,全心全意的給我鼓勵與支持,讓我可以沒有後顧之憂 的完成我的學業,尤其是我的父親,有空的時候就會打電話關心我目前的狀況,也不會 給予我太多壓力,只希望我跟姊姊都平安健康就好,讓我十分感動,讓我覺得自己一定 要全力以赴,不能辜負父親的一片心意。 感謝每一個關心過我的人,感謝每一位朋友,感謝大家。iv
Contents
摘要 ... i Abstract ... ii 致謝 ... iii Contents ... iv List of Tables ... v List of Figures ... vi Chapter 1. Introduction ... 11.1. Vehicular Ad Hoc Network and Communication ... 1
1.2. Information dissemination and its challenges ... 2
1.3. Forwarding decision and its problem ... 4
1.4. Motivation and Objectives... 5
1.5. Organization ... 5
Chapter 2. Related Work ... 6
2.1. Sender-oriented or Receiver-oriented Forwarding Decision ... 6
2.2. Data Dissemination in VANETs ... 6
2.3. Reducing Broadcast Redundancy strategies ... 8
2.3.1. Probability-based forwarding ... 8
2.3.2. Area-based forwarding ... 9
2.3.3. Neighbor-based forwarding ... 9
2.3.4. Self-pruning ... 10
Chapter 3. Nodes Covered Forward ... 12
3.1. Format of NCF beacon ... 13
3.2. Two-dimensional Euclidean Plane and Mobility Direction ... 14
3.3. Border nodes ... 14
3.4. Premises ... 15
3.5. Rebroadcast probability formulation ... 17
3.6. NCF architecture and algorithm ... 18
3.7. Comparing with RBM and Dai and Wu’s Algorithm ... 22
Chapter 4. Performance Evaluation ... 23
4.1. Simulation environment ... 23
4.2. Simulation settings ... 24
4.3. Simulation result and evaluation ... 25
Chapter 5. Conclusion and Future Work ... 30
List of Tables
Table 1 Premise parameters ... 15
Table 2 Parameter settings ... 24
Table 3 The number of rebroadcast times ... 27
vi
List of Figures
Figure 1 Vehicle to vehicle communication ... 2
Figure 2 Multi-hop broadcast ... 3
Figure 3 Redundant messages with A, B, and C ... 3
Figure 4 Broadcast storm problem ... 4
Figure 5 Border nodes ... 5
Figure 6 MOPR algorithm that choose the farthest node to forward ... 7
Figure 7 Vehicle mark neighbor from its neighbor ... 10
Figure 8 One of replacement paths for v ... 11
Figure 9 Covered nodes of receiver R ... 12
Figure 10 Beacon packet format ... 13
Figure 11 Normal message data packet ... 14
Figure 12 Mobility direction ... 14
Figure 13 NCF architecture... 19
Figure 14 NCF algorithm ... 20
Figure 15 Mark sender neighbor list and border nodes ... 20
Figure 16 Check border nodes ... 21
Figure 17 Simulation topology ... 23
Figure 18 The rebroadcast times of each protocol ... 26
Figure 19 The notified nodes ratio of each protocol ... 27
Chapter 1. Introduction
Vehicular ad hoc network is one of the major subjects of intelligent transportation system. With mobile devices and high technology equipments on the transportations, such as on-board unit (OBU), the vehicles can get information by using the wireless signal hop by hop. Each mobile device or standalone vehicle computer can transmit information to their neighbor nodes with a limited transmission range. The transmitted information can be safety message, road condition report, or entertainment multimedia data, etc. These useful messages can help drivers to take an easily and smoothly path to their destination. Besides, the drivers can prevent disaster happening if the situation on the road can be taken care properly.
1.1. Vehicular Ad Hoc Network and Communication
Vehicular Ad Hoc Network (VANET) is envisioning for intelligent transportation system (ITS) applications. IEEE 1609 is a family standard for Wireless Access in Vehicular Environment (WAVE) for providing a definition of entire vehicular information system. 1609.0 is an over view of WAVE, their components and operation included. In 2006.10, 1690.1 [1] about resource management of WAVE is proposed. 1690.2 [2] describes the security services, and makes messages protected against eavesdropping attacker. 1609.3 [3] is to support the communication between vehicle-to-vehicle and vehicle-to-roadside infrastructures, it also defends the connectivity and the flow rules for vehicle to interact with each other, furthermore, it contains the service accessing with travel-related information. The last, 1609.4 [4] presents the channel management with multi-channel operation.
Vehicular Ad Hoc Network (VANET) is a special class Mobile Ad Hoc Network (MANET). There are some different characteristics between VANET and MANET. First, the speed and mobility of vehicle is very fast, it’s the major cause of frequently disconnection between vehicles. Second, vehicles move on a fixed road map with many lines topology. Third, vehicles need to transmit information rapidly and rely on broadcast transmission frequently to disseminate data information. Furthermore, vehicles would not be concerned with power consuming and storage problem.
In IEEE 1609.3 [3], Dedicated Short Range Communication (DSRC) capable device with 5.9 GHz can support vehicular communication. There are two mode of communication for
2
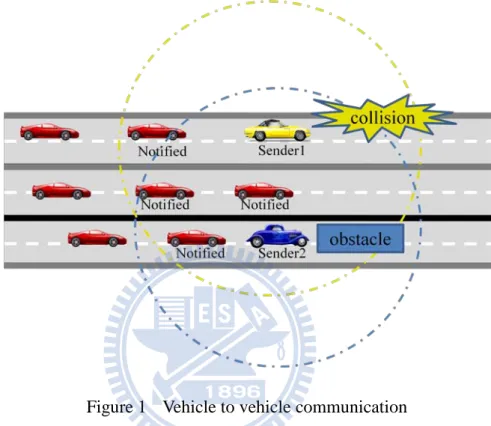
vehicle to get information and data, one is vehicle to road site unit (RSU), and the other one is vehicle to vehicle (V2V), here our thesis focus on the V2V ad hoc mode which vehicle communicate with each other vehicle by vehicle. As shown in Figure 1, when vehicle bump into a critical situation, it will broadcast the corresponding message to inform the other cars. The cars in the transmission range will be notified and take action to the incident immediately.
Figure 1 Vehicle to vehicle communication
1.2. Information dissemination and its challenges
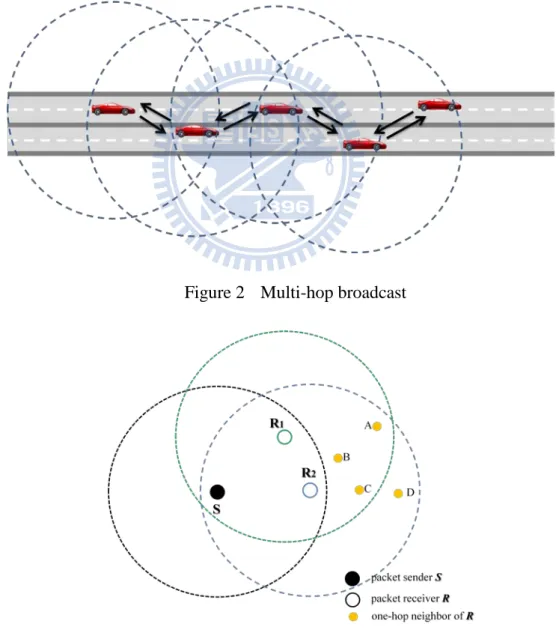
To propagate information, as shown in Figure 2, multi-hop broadcast is an important and frequently used transmission method to disseminate information. Many applications depend on the mechanism, such as route discovery, information exchanging, alarm notification. All vehicles rely on the broadcast protocol mostly. Intuitively, the simple flooding method can notify nodes in the network as many as possible. Figure 4 shows an example, when one source vehicle (Originator) starts to send a broadcast packet, the one-hop neighbors of the sender will receive the broadcast packet and rebroadcast, and so the two-hop neighbor will keep rebroadcasting the packet epidemically. Because all neighbors within the transmission range of originator have received the message, more and more redundant messages will be received by the neighbors of originator. The darker nodes means more redundant message they have.
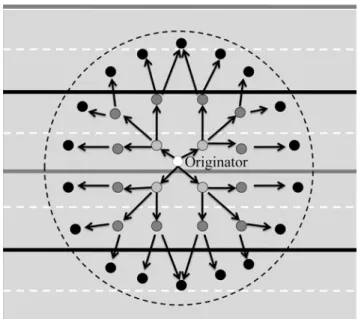
With simple flooding method, not only many redundant messages will be generated, but also cause many contention for neighbors to rebroadcast. After rebroadcast by all neighbors, more and more collision will degrade the performance of the network system, such an overhead is also called “broadcast storm problem” [5]. Basically, more vehicles to be in forward status, more vehicles will be notified with the information packet. However, more forwarder vehicles means more same packet forwarded in the network system, that is, more forwarders, there would be more network congestion, more collision opportunities, and more media contention times. In Figure 3, both two packet receiver (R1, R2) will rebroadcast, and node A, B, and C will get one redundant message. If A, B, and C are covered by more receivers, they get more redundant messages. Therefore, an efficient forwarding method should be applied to decrease the broadcast storm problem.
Figure 2 Multi-hop broadcast
4
Figure 4 Broadcast storm problem
1.3. Forwarding decision and its problem
In order to reduce redundant messages, many rebroadcast protocol has been proposed. By making forwarding decision to decide whether to rebroadcast a received packet, broadcast storm problem can be mitigated. There are many solutions to make forwarding decision. In [6], four schemes of broadcast are specified, simple flooding, probability-based methods, area-based methods, and neighbor-knowledge method. These methods depend on additional information (speed, direction, neighbor relationship, etc.) to rebroadcast and achieve higher coverage (reliability or notified nodes) about the information and lower overhead of broadcast (less redundant messages).
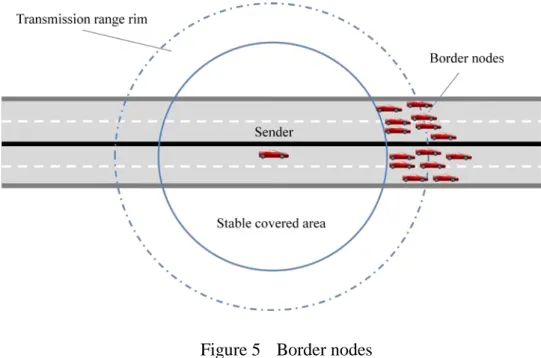
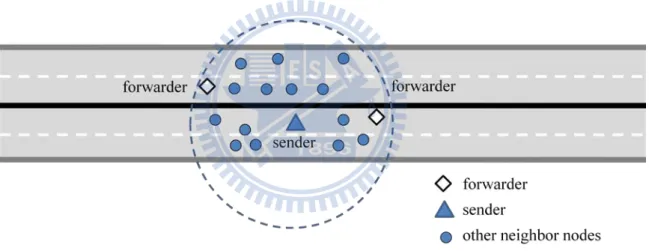
By the nature of vehicles on the road, cars move along roads but still lack of principle with high mobility, the relation between the vehicles changes rapidly. It’s hard to maintain the relationship between vehicles, and the behaviors of the drivers are also unpredictable. There are so many unexpected things on the road, how to overcome all the situations in a hurry is the problem we need to solve. Most of the recent methods need collected information on the road to make forwarding decision. However, with high mobility, neighbor nodes will have higher probability to go out of transmission range, especially the border ones as shown in Figure 5. If the outer border nodes are not yet notified to forwarders, forwarder will get out-of-date information and make wrong forwarding decision with out-of-date neighbor information. Many protocols suffer from the frequently changed topology of VANET. The methods by making forwarding with neighbor relationship will be influenced mostly.
Figure 5 Border nodes
1.4. Motivation and Objectives
In high mobility vehicular ad hoc environment, an efficient solution to disseminate data or information with broadcast should be concerned about two things, reducing redundant messages and forwarding message with correct parameters. We proposed a nodes covered forward (NCF) rebroadcast protocol to achieve these requirements. Forwarders will take the mobility of border nodes into account. To take precautions before it is too late, with more covered nodes, the forwarders will have higher probability to rebroadcast to cover un-notified nodes. With probability to rebroadcast, NCF can notify neighbor nodes about incident information with less retransmission times and also solve redundant messages problem.
1.5. Organization
The rest of this thesis is organized as follow: chapter 2 discusses some related work on forwarding algorithm of broadcast that reduces redundant messages. The chapter 3 gives a detail description of our proposed algorithm. And chapter 4 shows the performance of simulation and evaluation. Last, the future work and conclusion will be in chapter 5.
6
Chapter 2. Related Work
2.1. Sender-oriented or Receiver-oriented Forwarding Decision
When one vehicle has some critical situation, like car crash, navigation problem, out of function engine which needs rescued or other information exchange need, such as parking space, multi-media, advertisement data, these kind of messages will continue notifying all vehicles in a certain area. As mentioned in 1.2. , blind and simple flooding will cause many redundant messages in the network. It needs some selection methods of forwarders to avoid redundant messages problem.
There are two ways to make forwarding decision [7]. One is sender-oriented, the sender designates some of its neighbors and piggyback the nodes which need to forward the broadcast packet. When a receiver extracts designated-node ID from the message, the receiver will know whether to rebroadcast by comparing the ID with itself. The second one is receiver-oriented, when receiving the broadcast packet, the receiver will decide whether to rebroadcast by local information like neighbor relationship. If the message is satisfied with the condition of application, the message will be delivered to upper layer to take reaction.
For the reason of high mobility of vehicular environment, sender-oriented method will easily get wrong neighbor information of border nodes, and make improper forwarding decision. Furthermore, the piggyback designated neighbor information will increase packet size when the entire topology becomes larger. Therefore, choosing receiver-oriented forwarding decision will be more appropriate for selecting relay nodes.
2.2. Data Dissemination in VANETs
VANETs inherit some features of MANETs (mobility, wireless transmission). Many information dissemination protocols in MANET can also be adopted to fit for VANETs. With the special characteristic of VANETs, for instance, high speed mobility, moving in lines, and rural [8] or city environment [9], it needs to adjust some protocols of MANETs, and these protocols will be suit to VANETs.
As mentioned above, VANETs are high mobility environment, to construct a data path between vehicles will needs more efforts than MANETs. Because of fast moving and highly dynamic topology of VANETs, the relationship between vehicles changes a lot more than
MANETs. Therefore, in VANETs, the sender or receiver need to collect neighbor information, such as speed, direction to propagate messages and finds the potential relay to its destination. Using mobility to decide forwarders, as in MOPR [10] ,the sender chooses the farthest neighbor to be the message relay to avoid broken link (relay is out of transmission range after sender broadcasts the message), sender will not select the forwarders which will go out of the transmission range in its transmission time. The improvement of MOPR in [11], the forwarding decision method use the mobility to be a parameter in algorithm. The receiver will be chosen which is the farthest from sender to forward message and the vehicles that are going away from the transmission range of the sender would not rebroadcast the packet. Figure 6 depicts the forwarders that have been chosen from the farthest node from sender. The goal of MOPR is to find a forwarder to keep a stable transmission link from sender to destination.
Figure 6 MOPR algorithm that choose the farthest node to forward
Another improvement of MOPR to VANETs in [12], by combing the well-known OLSR protocol of MANETs with MOPR, the sender can choose optimal relay from multi-path to forward message. Each vehicle will keep a mobility table and the table entry is the link stability in terms of communication lifetime. When a vehicle tries to send message, it will look up the stability table to find the most stable link path. Like MANETs, although it can provide a more reliable of data transmission route, only vehicles in the route can receive data message.
8
2.3.
Reducing Broadcast Redundancy strategies
Broadcasting protocol is used to find forwarders to disseminate messages to unknown and undefined destinations. The purpose is to notify nodes in the network about the information as many as possible. Therefore, this kind of forward mechanism will fulfill our requirement on disseminating message to many vehicles in the road map.
The most important thing on broadcasting is how to disseminate message to nodes in low overhead. To get lower overhead, the broadcast method needs to decrease unnecessary messages (also called redundant messages). By choosing the appropriate forwarders, a good broadcast method can accomplish lower redundant message and higher notified ratio about the information. This kind of method is also called reducing broadcast redundancy protocols.
In the following, we introduce these reducing broadcast redundancy protocols and discuss the advantages and disadvantages.
Simple flooding is a pure method of forwarding. Each node just forwards the message or data they received. That is, every node is in forward status. There is a big problem with simple flooding. This method will cause a great amount of redundant messages which is also called “broadcast storm problem.” [5] Although it’s the good way to achieve great coverage of information dissemination, it will lead to many trouble of handling the redundant messages, and wasting of bandwidth. To decrease the redundancy, we need some selection of forwarders. In general, it’s not possible to eliminate all redundant messages in the entire system. Finding a small forwarding numbers and larger notified nodes as many as possible is the basic principle to reduce the redundant messages. The following are the method to reduce broadcast redundancy.
2.3.1. Probability-based forwarding
Probability-based forwarding tries to mitigate redundant messages by using probability to decide whether to forward the broadcast packet [5] [13]. By using a predetermined probability value or threshold value, the receiver will dynamically calculate the parameters like messages that have received, or the interaction times between neighbors. Like dynamic counter-based broadcasting [14].
[15][16]. However, to prefer the border nodes will cause some problem in high mobility environment, for example, border nodes will have low wireless signal strength, and higher bit error rate [17]. The broadcast packet will cause high packet lost rate and drop packet ratio.
2.3.2. Area-based forwarding
Area-based forwarding often uses topological information, such as two-hop neighbors or location information [18] [19] to determine whether to forward messages. By calculating the distance between neighbor [16], sender or destination, the distance metric will be a helpful parameter to develop broadcast protocol. The proposed area-based forwarding is to gain more addition coverage of transmission range. As in [20] DDB (Dynamic Delayed Broadcasting), the authors present a locally optimal broadcasting protocol which uses additional coverage (AC) of transmission range to calculate a forwarding delay time. To gain more additional coverage and less retransmission, farthest nodes will get lesser delay time to rebroadcast.
In [21], the author define a flexible backfire region which forwarders will refrain the other potential forwarders. In the region, only farthest forwarder from the sender retransmits the broadcast packet. However, the problem is like selecting border nodes to forward packet, higher bit error rate and frequently disconnect problem still exist.
2.3.3. Neighbor-based forwarding
Neighbor-based forwarding algorithms use the neighbor information to make a forward decision. By exchanging a small hello beacon, vehicles will get neighbor information, and store the information in their own neighbor cache. With the useful neighbor information, vehicles can choose the forwarders appropriately.
Sender and its neighbor can form a connected dominating set (CDS). Ideally, the vehicles are decided as forwarders if it can cover the max number of nodes with the smallest set of rebroadcast vehicles. All we want is to find the smallest set of forwarders that can alleviate all redundant messages. However, this is the well-known minimum connected dominating set (MCDS) NP-hard problem. So the neighbor-based forwarding methods aim to propagate information with as less redundant messages as possible by assigning distributed sub-optimal forwards from neighbors. For example, MPR (multipoint relays) [22] method is to select one-hop neighbor to rebroadcast and cover the two-hop neighbors. RBS [23] reduces number of forward nodes deterministically by one-hop neighbors. Moreover, RBS can guarantee full
10
delivery. However, RBS works under strict conditions such as well connected and uniform distributed deployment of nodes.
2.3.4. Self-pruning
Broadcast in ad hoc network based on self-pruning is an approach to reduce redundant message. When nodes received a packet from its neighbor, there are many rules for the receiver to decide whether to rebroadcast the packet. And nodes will decide which status it is. In forward status, nodes will rebroadcast the packet as it is a relay node. In non-forward status, nodes will drop the packet to prevent too many redundant messages to cause a mass on the environment.
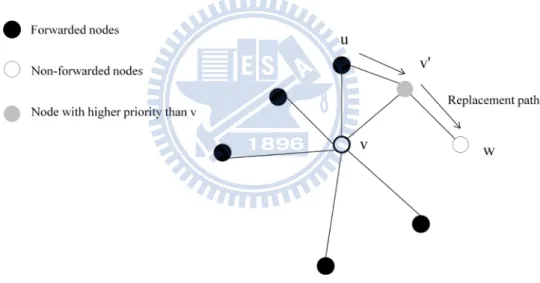
Self-pruning can take the neighbor information into account for the forward decision. The goal of self-pruning is to find a small connected dominating set (CDS) to be the forward set. There are many conditions for self-pruning to find the CDS, one simple condition is setting a timer and waiting until all neighbors received the same message. Then if the condition is satisfied, the receiver will rebroadcast packet, otherwise, nodes will be in non-forward status stopping forward messages. Figure 7 depicts the message transmitted information in the memory storage of receiver. By marking the neighbor which sends messages, the receiver can form a map of the sender v to its neighbor cache. When the timer is expired, node v will judge whether it have received all the messages from its neighbor. In this simple approach, timer and the neighbor are critical criteria, for most protocol and the practical vehicular environment, it’s hard to get the up-to-date neighbor relationships for frequently change of the topology, especially the nodes on the border.
Figure 7 Vehicle mark neighbor from its neighbor
two genetic schemes for condition. If forward node set is decided without routing history (set of nodes that have forwarded the broadcast packet), then it’s a static condition self-pruning, if forward node set is decided with routing history, it’s called dynamic condition self-pruning.
Dai and Wu’s deterministic broadcast algorithm [24] is one of the dynamic condition self-pruning. In order to ensure all nodes get a copy of the broadcast message, and minimize the number of retransmissions. Dai and Wu’s algorithm use one-hop and two-hop neighbor information to make forwarding decision. Node will be pruned (be in non-forward status, reduce the number of rebroadcast) if there exist a replacement path from u (forward status nodes) to w (non-forward status nodes) through a higher priority node v’ (node id). Because the relationship between all nodes is an undirected graph, to find a replacement path all node should be defined a total order, the simple solution is to use node id to represent it. The higher priority of node guarantee there exists at least a path to the nodes that have not been covered. Then v will be non-forward status to decrease the number of redundant messages.
Figure 8 One of replacement paths for v
As what we observed, there are many algorithms that trying to find good bound on the retransmissions, but rare of them take the mobility of vehicle into account. If the mobility of vehicle is not considered, vehicles will get out-of-date information and make a wrong forward decision with wrong parameters, especially the neighbor-based forwarding algorithm. Therefore, we combine the probabilistic method and maintain marked neighbor information to develop locally optimal rebroadcast protocol, and the protocol can reduce the redundant messages in high mobility vehicular environment.
12
Chapter 3. Nodes Covered Forward
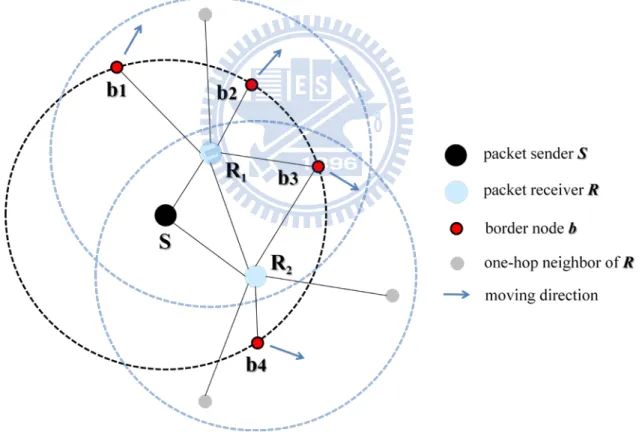
In this thesis, we proposed Nodes Covered Forward (NCF) method. Figure 9 depicts the concept of our method, when a vehicle R received message from vehicle S, vehicle R has to decide whether to rebroadcast again to cover its neighbors. Because we also include two-hop neighbor information for forwarding decision, we have to ensure the one-hop neighbor S which has send the message will still cover unstable two-hop neighbor nodes. The node b will be an unstable border node if the location of b is on the border range of S. neighbor b has the possibility to go out of the transmission range of S. Therefore, before R makes forwarding decision, the unstable node need to be filtered out from the calculation procedure of R. Consequently, filtering out the unstable nodes will increase the probability to rebroadcast and the rebroadcast packet can cover the nodes by one-hop neighbor of R again.
Figure 9 Covered nodes of receiver R
Before we discuss our algorithm, we first make some assumptions of our problems. Here we focus on the inter-vehicle-communication (IVC), every vehicle communicate with each other without infrastructure road-side-unit (RSU). Furthermore, every vehicle is Global Positioning System (GPS) available, so each vehicle can be aware of its position when
starting broadcast beacons about its own information.
3.1. Format of NCF beacon
In ad hoc network vehicular environments, due to the mobility of vehicles and lack of infrastructure help, vehicles need to exchange the position and other useful information such as speed, direction, id to help establish an up-to-date neighbor cache table and maintain a distributed local network. The information depends on exchanging a small hello beacon packet periodically to each vehicle. It’s very important and necessary for nodes to periodically broadcast the beacon information, it allows vehicles to maintain the position and being watched by applications, for example, if the distance between two cars is being too close, the application will set up an alarm to notify the drivers to keep a safety distance. If we want to overcome the mobility influence on vehicular environment, a periodical hello beacon will need to be provided in broadcast protocols.
There are two type of packet that will be broadcast in our algorithm. The first one format is shown as Figure 10, we create the beacon format as follow, src-id is for recognizing which is the original source of this beacon. Because we assume each vehicle is GPS available, all vehicles can be aware of their position and direction information. Thus the src-position of the source location and the src-direction vector can be piggybacked in beacon by forwarders as well. Direction vector is a two-dimensional plane vector that point out the direction where the source is heading for. Considering of security issue, malicious vehicle will overhear the neighbor information, even forge wrong information, so we don’t use the snooped method to get two-hop neighbor information, we use the piggybacked two-hop id instead.
Once a vehicle R received a beacon from its neighbor S, the vehicle will create an entry table to store the information of S, in the mean while the current timestamp will be added to the entry. When the vehicle R has not received the beacon update from neighbor S for a while, an expiring timer will start. If the timer exceeds the threshold time, the neighbor S will be removed from the cache of vehicle R.
14
Figure 11 Normal message data packet
Figure 11 is the simple message packet. When vehicles trigger the alarm, this simple packet will be generated with a message ID, the ID will be represent what kind of situation the vehicle is facing.
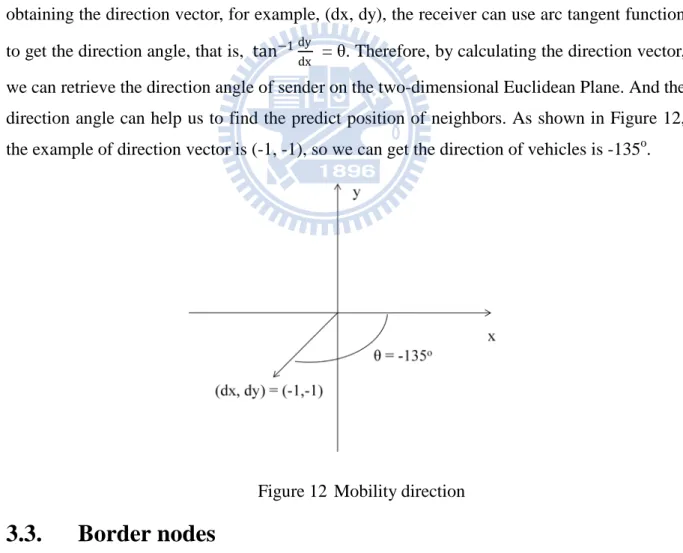
3.2. Two-dimensional Euclidean Plane and Mobility Direction
In Figure 12, we use the two-dimensional Euclidean plane to illustrate the mobility direction. All nodes are deployed on the plane with unique id, speed, and direction. By obtaining the direction vector, for example, (dx, dy), the receiver can use arc tangent function to get the direction angle, that is, tan−1 dy
dx = θ. Therefore, by calculating the direction vector, we can retrieve the direction angle of sender on the two-dimensional Euclidean Plane. And the direction angle can help us to find the predict position of neighbors. As shown in Figure 12, the example of direction vector is (-1, -1), so we can get the direction of vehicles is -135o.
Figure 12 Mobility direction
3.3. Border nodes
In NCF, the probability of rebroadcast receiving messages depends on neighbor information as well as the number of border nodes. Vehicle communicates with each other via
beacon exchanging. Information in the beacon of a node, including location, speed, motility direction, etc, periodically broadcasts to its neighbors. To identify a node as a border node, the receiver collects the beacon from each neighbor and predicts each location at next beacon interval. The location formulas of x-coordinate and y-coordinate can be defined as
' cos( )
x = +x speed beacon_interval× ×
θ
(1)' cos( )
y = +y speed beacon_interval× ×
θ
(2) (x,y) and (x’,y’) are the neighbor’s current and future location respectively. The mobility direction θ can be obtained by the direction vector of a beacon from a neighbor. Through the above method, a receiver can indicate the number of border nodes precisely, and then to estimate the rebroadcast probability.The border node b will be an unstable node because it locates at the edge of the transmission range of S. With mobility, it is highly possible for b to miss or drop the packet sent by S. Thus, we consider it as an element in our probability formulation.
3.4. Premises
The following are the parameters we will use in our probability formulation and the components in our NCF algorithm:
Table 1 Premise parameters
Symbol Notation Remarks
S The broadcast packet sender For receiver R, S is a forwarder or
originator of broadcast packet.
R The receiver of broadcast packet R is a forwarder and it starts to calculate
rebroadcast probability to decide whether to rebroadcast packet.
P Probability to rebroadcast of receiver R R will generate uniform probability form 0 ~ 1.0, and compare with calculated P to decide whether to rebroadcast.
16
b Border node of sender S Border nodes are decided by neighbor
mobility of R, the nodes out of the transmission range of S will be border nodes.
Nb Set of border nodes of receiver S Nb are unstable border nodes which will
escape from one-hop neighbors of R.
N(R) Set of one-hop neighbors of receiver R and only covered by R
The neighbor information will be notified by beacon exchanging. By hop counts in beacon, receiver will know which neighbor information should be update.
N2(S) Set of two-hop neighbors of sender S but not in the transmission range of S
Nm Set of marked node of receiver R For receiver R, marked nodes mean R
has received one copy from the neighbor.
Nu Set of unmarked node of receiver R For receiver R, Unmarked nodes mean
no copies from the neighbor.
CN(R) Set of total one-hop neighbors of receiver R
The border nodes are also included in
CN(R), One-hop neighbors of receiver R
but not covered by S and borders of S covered by R. (N(R) not covered by S and Nb(S) covered by R)
R’ The other rebroadcast candidates Neighbor of S excludes Nb(S) and itself
( N(S)-Nb(S) -1)
N+(R) The nodes only covered by R CN(R) but not covered by the other R’
M message with incident id Messages to notified nodes about an
incident. The vehicles in the detection range will be notified and then notify the neighbor nodes as many as possible.
3.5. Rebroadcast probability formulation
When a receiver R received message from sender S, R has to decide whether to rebroadcast the message to cover its neighbors. As shown in Figure 9, the border nodes and one-hop neighbors of R are the nodes that need the receivers to do rebroadcast. To determine a suitable rebroadcast probability with high mobility environment, the probability will have to satisfy the following two requirements. (1)Higher coverage (the messages will be received by nodes in the network as many as possible) (2) Lower overhead (less redundant messages are generated in the network.)
In general, the methods to mark received neighbor use one-hop neighbors that have rebroadcasted to cover two-hop neighbors. With high mobility, the border nodes can easily be out of the transmission range of sender S. Therefore, it’s necessary to take the border nodes into our probability account. To cover these border nodes to have a higher coverage, the probability take the number of border nodes considered having received message from sender
S included. The increasing number of unmarked vehicles will increase the probability to
rebroadcast. This solution will raise the rebroadcast probability to cover unmarked nodes. There is more than one vehicle to receive the packet sent by the sender S, and the rebroadcast is more valuable if the receiver cover more nodes. We define the rebroadcast probability as
[
]
2 1 + b 2 N (R) CN(R) P(R) N (S) N (S) CN(R) + × = + + (3)N+(R) is the number of nodes only covered by the receiver. The nodes in the set highly
demand the receiver to rebroadcast. CN(R) is the total number of nodes covered by the receiver, it includes the nodes that covered by other receivers. While the receivers are getting more, the two-hop neighbors of S are probably covered by more than one receiver. We both consider the higher coverage and lower overhead in the numerator. For a specific R, if the one-hop neighbors can averagely covered by other receivers, the rebroadcast probability is small. On the contrary, the probability will be larger, if CN(R) and N+(R) increase. In the dense network, CN(R) dominated the probability because most receivers may have few nodes which covered
only by that receiver. In the sparse network, N+(R) is large, and it can raise the opportunity of
rebroadcast. Nb is the number of border nodes, and 𝑁𝑁2(𝑆𝑆) is the number of two-hop neighbors
uncovered by the sender. Nb and 𝑁𝑁2(𝑆𝑆) are the demanders that request receivers to
18
Figure 9 depicts the concept of our method. When R1 and R2 received packets from S, R1
and R2 use the information in the beacon to find out the border nodes and one-hop neighbors.
Then we compute the rebroadcast probability of R1 and R2 respectively. There are total 4
border nodes and 3 one-hop neighbors of R need rebroadcast in the network. For R1, 3 border
nodes and 1 one-hop neighbor are covered by R1, and b3 is even covered by the other receiver.
Therefore, N(R1), CN(R1), Nb, and N2(S) are 3, 4, 4, and 3 respectively. According to the
probability formulation, the rebroadcast probability of R1 is 0.3265.
The main idea of NCF algorithm is let the forwarding candidates with more the covering nodes and uniquely occupied nodes have higher probability to rebroadcast and the others with less covering nodes was be deferred and make the contribution in the future. From the probability, if one receiver decided not to rebroadcast, it was deferred with the period inverse to the probability it has. After that, the receiver has the responsibility to rebroadcast the message again.
With one critical situation, R meet S for the first time and R have not create a neighbor entry for S. Once R calculates the rebroadcast probability, it will underestimate the uncovered nodes of S because beacon is not updated by R yet. This kind of situation happen very often if the direction of R and S are opposite to each other. R has to include its neighbors which are not updated to S too. So the denominator of rebroadcast probability need plus the CN(R) of R’s own.
3.6. NCF architecture and algorithm
The total overview of our NCF architecture is shown in Figure 13. We can take the NCF architecture into two parts. When received message is a beacon packet, then it will be use to maintain one-hop and two-hop mobility neighbor information. In case of incident messages, NCF algorithm will use the dynamic mobility information to calculate the appropriate probability to rebroadcast incident message.
In our NCF architecture, there are two type of message, one is beacon for maintaining neighbor information, and the other one is incident message, such as application messages, advertisement, or parking lot information. In NCF, we use the receiver-oriented forwarding decision, upon receiving the broadcast packet, receiver will decide whether to forward message if condition is satisfied. Here condition is satisfied means receiver will get enough opportunity to forward the packet, and the forwarding action would reduce the redundant
message as many as possible.
Once a vehicle receives the beacon message, if the hops number is more than two hops, then it won’t be necessary to forward it again. On the contrary, the one-hop beacon will be forwarded after piggybacking the information of receiver. Then the beacons contents are one-hop and two-hop information both, the information are source id, position, direction vector, and speed for calculating predict position and relationship between neighbors.
On the other hand, if the message is an incident message, first of all we generate a random number between zero and default beacon interval, this timer number is for calculating the predict position of neighbors. Then NCF algorithm marks the neighbor to stand it has received the copy of incident message, we assume the one-hop neighbor will be in the coverage of neighbor, some unmark actions and neighbor adjustment will be applied after predicting neighbor position.
R received a broadcast packet M
from S
Vehicles moving on map
M is a message packet
If beacon hops < 2 YES
Continue to
forward beacon Free beacon packet NO
Start NCF algorithm
Calculate forward probability P
Forward message M by P
Sending beacon in default interval and detecting incident
M is a beacon packet
Piggyback information of R
20
R received a incident packet M
from S Start NCF algorithm
Get information of S from neighbor cache Check border nodes of S, Calculate covered nodes of R
and forward probability P If forward M by P
End NCF algorithm and wait another M
YES
Set forward timer of R, and wait forward timer is up NO
Figure 14 NCF algorithm
Figure 14 is the flow of our NCF algorithm, if the rebroadcast packet is an incident message, R will start counts it’s covered nodes and rebroadcast probability based on S.
Node i is border node
YES Start Mark_Sender_Neighbor
Received M from S Mantained N1(R) and N2(R)
Keep original mark/unmark status
NO
Add i into Nb list
We predict the neighbor mobility by function Mark_Sender_Neighbor (Figure 15), and function Check_Border_Nodes (Figure 16), if the one-hop neighbors will be out of the transmission range of sender S, then we mark the neighbors to be an unstable border node. Otherwise, it will keep the original mark status.
After marking received messages neighbors, we get the Nm to be the set of marked neighbors. For each sender S, we calculate the probability formulation as discussed in 3.5. After calculating the necessary rebroadcast probability for unmarked nodes, and the information of S we achieve the probability to rebroadcast the message packet. If one receiver decided not to rebroadcast, it will set a forward timer, when timer is up, the receiver has the responsibility to rebroadcast the message again. Furthermore, the most covered nodes receiver will have less delay time, and the forward delay of the other one is the inverse of probability.
Finally, because we use border nodes mobility to be a parameter in our rebroadcast probability and unmark the border nodes, our NCF algorithm can endure high mobility VANETs environment. This NCF algorithm alleviates the redundant messages of entire system, and still keeps an acceptable notified ratio.
Calculate predict position by mobility
Neighbor_cache
Predicted position is out of transmission range of S
Add to Nb and list YES
YES Start
Check_Border_Nodes
Still have neighbors in cache NO
End Check_Border_Nodes
22
3.7. Comparing with RBM and Dai and Wu’s Algorithm
We compare the performance of our algorithm with simple flooding, RBM (role-based multi-hop broadcast) and Dai and Wu’s algorithm.
The RBM is the forwarding decision with vehicle distance to the sender. Because RBM also design for unknown destination in dissemination information environment, it can be also applied to be receiver-oriented method. The receiver will judge its distance from the sender, if the receiver is the maximum distance from sender and not an unstable border node of sender. The receiver will have less delay forward time to rebroadcast the message.
Dai and Wu’s algorithm use the two-hop information to pruning the receiver with a replace path. If the receiver can find a replace path from its neighbor with higher priority, it won’t be necessary to rebroadcast the packet. Furthermore, plus the simple flooding to be the upper bound of our simulation, the result will be discussed in Chapter 4.
Chapter 4. Performance Evaluation
In this thesis, the redundant messages and notified nodes are considered. We take a prior factor of reducing redundant messages. We think the most efficient broadcast protocol needs to meet the overhead relaxation, and we analysis the rebroadcast ratio of each protocol to conclude simulation result.
4.1. Simulation environment
We implemented the NCF in NS-2. For generating the urban topology and traffic scenario in VANET, we use Traffic and Network Simulation (TraNS) [25] to generate realistic and practical vehicular network mobility. TranNS is link to two open-source simulator, Simulation of Urban Mobility (SUMO) [26] and NS-2. TranNS is a GUI tool for generating TCL script file that can be applied to NS-2. With SUMO, TraNS can use the map as shown in Figure 17 to generate realistic vehicular mobile pattern for each car with the traffic events of car accident or traffic light. The realistic road map will help us to simulate a reasonable result practically.
The topology size is 12594.38m * 6208.0m. Using the generate route function; it can generate a random and realistic vehicle nodes on the map. We test different size of vehicle node density, there are 50, 100, 150, 200, 300 nodes tests and each with 6 times run on NS-2. Finally we get the average result after applying our NCF protocol.
24
4.2. Simulation settings
Table 2 Parameter settings
MAC type 802.11
Channel type WirelessChannel
Radio propagation model TwoRayGround model
Antenna type Omni Antenna
Vehicle nodes 50, 100, 150, 200, 250, 300
Transmission range 300 meters
Incident location 4 incident locations
Map size 12594.38m * 6208.0m
Beacon interval 5 seconds
Interface queue length 50 packets
Simulation time 1200 seconds
The simulation parameters are listed in Table 2, we adopt the standard 802.11 MAC protocol and the propagation model is two-ray ground. The transmission range is 300 meter. Any vehicle in the transmission range of the rebroadcast message node will be notified. The beacon interval is 5 seconds and total simulation time is 1200 seconds.
There are four locations of incident alarm areas. The four areas are located in four big intersections in the map Figure 17, the cars come through the area will be slow down and set up the alarm event to generate the original incident message. We then log down the redundant message that received and notified vehicles.
4.3. Simulation result and evaluation
The following are the metrics we used to evaluate out protocol quality and the other protocols in comparison.
Total Rebroadcast times:
Total number of rebroadcast events occurs in the network. Notified node ratio:
Notified node ratio = Total number of notified nodes Total number of nodes Rebroadcast efficiency:
Notified node ratio = Total number of notified nodesTotal rebroadcast times
1) Total rebroadcast times:
Figure 18 is the total rebroadcast times that generated at each protocol, as we can see, the simple flooding generates the most redundant messages, and the simple flooding has largest rebroadcast times and it increasing significantly. The simple flooding protocol can be the upper bound standard, because each vehicle will absolutely rebroadcast the message they received.
The Role-based multicast (RBM) has high rebroadcast times in the dense network. Because the receiver are the farthest ones by comparing the distance with its neighbors to decide whether to rebroadcast packet, in high mobility, the dynamic topology change rapidly, with more vehicles in the system, more vehicles appear at the transmission border. Furthermore, receivers are not aware of the others neighbor cache, and out-of-date neighbor information exchanged, more vehicles think that there are the farthest vehicle from the sender. Therefore, with the increase of rebroadcast vehicles, the number of rebroadcast times also gets high. Moreover, in bidirectional road environment, more collision occurs when message sent from the border nodes than the stable one which closer to the sender and cover more nodes.
The Dai and Wu’s algorithm (DW) and our NCF algorithm both are good methods which reduce multiple rebroadcast times no matter when the network is dense or sparse. More
26
explicit redundant number is shown in Table 3, since the increasing redundant message number with high density vehicles is unavoidable, but our NCF algorithm can endure the high mobility environment and make the redundancy under control. Comparing with the simple flooding method, DW can reduce about 87% redundant messages, and our NCF can reduce 97% rebroadcast times on average. From the result, our NCF method can reduce more rebroadcast times than the other protocols.
Figure 18 The rebroadcast times of each protocol
Our NCF algorithm is better than Dai and Wu’s algorithm. Because with high mobility and random vehicle id deployment vehicles environment, Dai and Wu’s algorithm is hardly to find a higher priority vehicle to be the replacement path, so many inappropriate vehicles will rebroadcast unnecessary messages. Actually, the performance of Dai and Wu’s algorithm depends on how the vehicles deployment uniformly and stability of mobility. Otherwise the rebroadcast nodes will be the few vehicles surrounded with enough higher id vehicles.
Table 3 The number of rebroadcast times Rebroadcast times Nodes Simple flooding RBM DW NCF 50 2418 355 677 109 100 6325 954 838 270 150 20492 2491 2512 703 200 51263 5784 4320 1416 250 67557 7454 4226 1248 300 92378 9829 4935 1544 Average reduced rebroadcast times 0% 87% 88% 97%
28
2) Number of notified nodes:
Figure 19 depicts the notified vehicles. Also the precise numbers of vehicles are listed in Table 4. Simple flooding and RBM have the similar notified nodes, because RBM choose the farthest vehicle to forward message, so the frequently broken gap between vehicles can be covered. Regardless of redundant messages, RBM will have better performance than simple flooding. Since more vehicles with simple flooding will cause heavy broadcast storm problem. Considering of reducing unnecessary retransmitted messages, DW has worse notified nodes ratio and NCF is in the middle when network is sparse. NCF still has the proper notified nodes ratio compared with the RBM and simple flooding in the dense network. It’s a tradeoff between the notified nodes ratio and the total rebroadcast times.
Table 4 The number of notified nodes Notified nodes Nodes Simple flooding RBM DW NCF 50 36 (73%) 37(75%) 35(69%) 38(75%) 100 92 (92%) 94(94%) 85(85%) 97(97%) 150 140 (93%) 137(91%) 125(83%) 140(93%) 200 196(98%) 192(96%) 189(95%) 194(97%) 250 246(98%) 247(99%) 242(97%) 247(99%) 300 294(98%) 297(99%) 292(97%) 295(98%) Average
Figure 20 The rebroadcast efficiency
3) Rebroadcast efficiency
The rebroadcast efficiency is defined to tell us the quality of the protocol that can use the least number of messages and notify most number of vehicles. In Figure 20, the NCF has higher rebroadcast efficiency than other protocols. Because NCF let the nodes with high node covering ratio and high uniquely covered nodes have higher probability to rebroadcast. Also, it let the forwarding probability of the other nodes almost close to zero, so it has proper number of notified nodes and low rebroadcast times which lead to high rebroadcast efficiency. Although RBM has high number of notified nodes but it has more rebroadcast times than NCF in all the case of network size, so it has worse rebroadcast efficiency than NCF. DW is in the middle because it has low redundant message and also has smaller number of notified nodes than NCF and RBM. Simple flooding is the worst one since it cause so many rebroadcast times.
30
Chapter 5. Conclusion and Future Work
In this thesis, we proposed an efficient broadcast protocol named Nodes Covered Forward (NCF) algorithm. NCF protocol can be applied to forward decision in VANET. There are two key points of our contribution. One is to reduce unnecessary messages distribution on the air, and the other one is to use appropriate probability to rebroadcast message in high mobility environment. From the simulation result, our approach reduces 97% redundant messages and keeps an acceptable notified ratio about 93%.
To find a suitable rebroadcast probability in VANET, NCF dynamically use the neighbor information that received the copy of the message. Many self-pruning solutions assume the one-hop neighbor can cover the two-hop away neighbors in MANET. However, in high mobility VANET environment, the two-hop neighbor will be out of the coverage frequently. So the NCF algorithm calculate the probability not only consider the neighbors out of the coverage of sender, but also take the unstable vehicles on the border into account. Because of filtering out the unstable nodes, unmarked border nodes will increase the probability of rebroadcast. Therefore, the method can increase the message dissemination coverage against broken link gap between vehicles. By using the probability rebroadcast method, NCF can reduce the redundant messages significantly than the other forward decision broadcast protocol.
To set up more realistic VANET environment, we use the TraNS to create the vehicle mobility map. The mobility map can be compatible to the famous simulator NS-2, and the simulation result shows that our NCF protocol is better than the other protocols.
In our work, considering the security issue of VANET, we use the piggybacked beacon information to maintain the predicted mobility neighbor list. If the beacon packet can be disseminated efficiently in secure level against forging beacon from malicious nodes and dynamically adjusted with beacon interval in different environment, the predicted neighbor list will be more accurate by cooperative change beacon inter different area. By association with different optimal rebroadcast information, the proposed algorithm can be improved more. Therefore, how to aggregation the distributed messages in different area will be our future work.
References
[1] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) - Resource Manager,” IEEE Std 1609.1-2006, 2006.
[2] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments - Security Services for Applications and Management Messages,” IEEE Std 1609.2-2006, 2006. [3] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) -
Networking Services,” IEEE Std 1609.3-2007, 2007.
[4] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) - Multi-Channel Operation,” IEEE Std 1609.4-2006, 2006.
[5] Wisitpongphan, “Broadcast storm mitigation techniques in vehicular ad hoc networks,”
IEEE Wireless Communications, vol. 14, 2007, pp. 84-94.
[6] B. Williams and T. Camp, “Comparison of broadcasting techniques for mobile ad hoc networks,” Proceedings of the 3rd ACM international symposium on Mobile ad hoc
networking, Lausanne, Switzerland: ACM, 2002, pp. 194-205.
[7] R. Hatori, A. Uchikawa, T. Kuroki, and H. Shigeno, “Condition-based data
dissemination method combining adaptive beacon transmission and autonomous packet forwarding,” 2009 IEEE 34th Conference on Local Computer Networks, Zurich, Switzerland: 2009, pp. 702-707.
[8] M. Zhang and R. Wolff, “Routing protocols for vehicular Ad Hoc networks in rural areas,” IEEE Communications Magazine, vol. 46, 2008, pp. 126-131.
[9] Z. Mo, H. Zhu, K. Makki, and N. Pissinou, “MURU: A Multi-Hop Routing Protocol for Urban Vehicular Ad Hoc Networks,” 2006 3rd Annual International Conference on
Mobile and Ubiquitous Systems - Workshops, San Jose, CA, USA: 2006, pp. 1-8.
[10] H. Menouar, M. Lenardi, and F. Filali, “Movement Prediction-Based Routing (MOPR) Concept for Position-Based Routing in Vehicular Networks,” 2007 IEEE 66th Vehicular
Technology Conference, Baltimore, MD, USA: 2007, pp. 2101-2105.
[11] S. Lo and W. Lu, “Design of Data Forwarding Strategies in Vehicular Ad Hoc Networks,” VTC Spring 2009 - IEEE 69th Vehicular Technology Conference, Barcelona, Spain: 2009, pp. 1-5.
[12] H. Menouar, M. Lenardi, and F. Filali, “Improving Proactive Routing in VANETs with the MOPR Movement Prediction Framework,” 2007 7th International Conference on
ITS Telecommunications, Sophia Antipolis, France: 2007, pp. 1-6.
[13] T. Pongthawornkamol, K. Nahrstedt, and G. Wang, “HybridCast: A Hybrid
Probabilistic/Deterministic Approach for Adjustable Broadcast Reliability in Mobile Wireless Ad Hoc Networks,” 2009 IEEE International Conference on Communications, Dresden, Germany: 2009, pp. 1-6.
32
[14] A. Mohammed, M. Ould-Khaoua, L.M. Mackenzie, and J. Abdulai, “Dynamic probabilistic counter-based broadcasting in mobile ad hoc networks,” 2009 2nd
International Conference on Adaptive Science & Technology (ICAST), Accra, Ghana:
2009, pp. 120-127.
[15] S. Bai, Z. Huang, D. Kwak, S. Lee, H. Oh, and J. Jung, “Vehicular Multi-Hop
Broadcasting Protocol for Safety Message Dissemination in VANETs,” 2009 IEEE 70th
Vehicular Technology Conference Fall, Anchorage, AK, USA: 2009, pp. 1-5.
[16] L. Briesemeister and G. Hommel, “Role-based multicast in highly mobile but sparsely connected ad hoc networks,” 2000 First Annual Workshop on Mobile and Ad Hoc
Networking and Computing. MobiHOC (Cat. No.00EX444), Boston, MA, USA: , pp.
45-50.
[17] H. Okada, A. Takano, and K. Mase, “A Proposal of Link Metric for Next-Hop Forwarding Methods in Vehicular Ad Hoc Networks,” 2009 6th IEEE Consumer
Communications and Networking Conference, Las Vegas, Nevada, USA: 2009, pp.
1-5.
[18] T. Osafune, L. Lin, and M. Lenardi, “Multi-Hop Vehicular Broadcast (MHVB),” 2006
6th International Conference on ITS Telecommunications, Chengdu, China: 2006, pp.
757-760.
[19] Y. Bi, H. Zhao, and X. Shen, “A Directional Broadcast Protocol for Emergency Message Exchange in Inter-Vehicle Communications,” 2009 IEEE International Conference on
Communications, Dresden, Germany: 2009, pp. 1-5.
[20] M. Heissenbuttel, T. Braun, M. Walchli, and T. Bernoulli, “Optimized Stateless Broadcasting in Wireless Multi-Hop Networks,” Proceedings IEEE INFOCOM 2006.
25TH IEEE International Conference on Computer Communications, Barcelona, Spain:
2006, pp. 1-12.
[21] M. Mariyasagayam, T. Osafune, and M. Lenardi, “Enhanced Multi-Hop Vehicular Broadcast (MHVB) for Active Safety Applications,” 2007 7th International Conference
on ITS Telecommunications, Sophia Antipolis, France: 2007, pp. 1-6.
[22] A. Qayyum, L. Viennot, and A. Laouiti, “Multipoint relaying for flooding broadcast messages in mobile wireless networks,” System Sciences, 2002. HICSS. Proceedings of
the 35th Annual Hawaii International Conference on, 2002, pp. 3866-3875.
[23] M. Khabbazian and V. Bhargava, “Efficient Broadcasting in Mobile Ad Hoc Networks,”
Mobile Computing, IEEE Transactions on, vol. 8, 2009, pp. 231-245.
[24] Fei Dai and Jie Wu, “Performance analysis of broadcast protocols in ad hoc networks based on self-pruning,” IEEE Transactions on Parallel and Distributed Systems, vol. 15, 2004, pp. 1027-1040.
[25] M. Piórkowski, M. Raya, A.L. Lugo, P. Papadimitratos, M. Grossglauser, and J. Hubaux, “TraNS: realistic joint traffic and network simulator for VANETs,” SIGMOBILE Mob.
Comput. Commun. Rev., vol. 12, 2008, pp. 31-33.