數位影像相關係數法於鏡頭扭曲校正之應用
132
0
0
全文
(2) 目錄 表目錄........................................................................................................V 圖目錄..................................................................................................... VII 中文摘要................................................................................................. XII 英文摘要............................................................................................... XIV 第一章、前言 ............................................................................................1 1.1. 研究動機 ...................................................................................1. 1.2. 研究目的 ...................................................................................2. 1.3. 研究方法 ...................................................................................2. 1.4. 研究架構 ...................................................................................3. 第二章、文獻回顧 ....................................................................................5 2.1. 數位影像相關係數法 ...............................................................5. 2.2. 鏡頭扭曲校正 ...........................................................................7. 2.3. 2.2.1. 扭曲係數 .........................................................................7. 2.2.2. 扭曲中心 .........................................................................8. 文獻總結 ...................................................................................9. 第三章、研究方法 ..................................................................................11 3.1. 數位影像相關係數法 .............................................................11 3.1.1. 二維數位影像相關係數法...........................................11 I.
(3) 3.1.2. 三維數位影像相關係數法...........................................13. 3.2. 感光元件平面及位移平面之平行 .........................................18. 3.3. 鏡頭扭曲影像校正 .................................................................21 3.3.1. 鏡頭扭曲 .......................................................................21. 3.3.2. 扭曲係數 .......................................................................22. 3.3.3. 扭曲中心 .......................................................................27. 3.3.4. 標準差 ...........................................................................32. 第四章、感光元件平面及位移平面之平行實驗 ..................................33 4.1. 實驗規劃 .................................................................................33 4.1.1. 試體製備 .......................................................................33. 4.1.2. 實驗儀器與配置...........................................................33. 4.1.3. 實驗步驟 .......................................................................36. 4.2. 中心點平均位移法驗證 .........................................................37. 4.3. 中心點平均位移法實測 .........................................................39. 4.4. 實驗總結 .................................................................................42. 第五章、平面網格法之驗證 ..................................................................44 5.1. 扭曲中心及扭曲係數的驗證 .................................................44 5.1.1. 理論網格製備...............................................................44. 5.1.2. 理論網格校正步驟.......................................................45. II.
(4) 5.2. 5.3. 5.4. 5.1.3. 扭曲中心及扭曲係數之校正效果...............................47. 5.1.4. 扭曲方程式項次之影響...............................................51. 高斯分佈亂數誤差 .................................................................56 5.2.1. 高斯分佈 .......................................................................56. 5.2.2. 高斯分佈亂數誤差之影響...........................................56. 扭曲中心之影響 .....................................................................59 5.3.1. 扭曲中心計算方法之影響...........................................59. 5.3.2. 扭曲中心影響之比較驗證...........................................62. 網格試體平面旋轉不平行之處理方式 .................................73. 第六章、平面網格法實測誤差之探討 ..................................................79 6.1. 網格試體製備 .........................................................................79. 6.2. 實驗儀器與配置 .....................................................................80. 6.3. 實驗步驟 .................................................................................81. 6.4. 分析結果 .................................................................................82 6.4.1. 扭曲中心計算方法之影響...........................................82. 6.4.2. 扭曲中心有無之影響...................................................85. 6.4.3. 固定鏡頭改變焦距之影響...........................................86. 第七章、三維平面之扭曲校正 ..............................................................92 7.1. 三維平面校正法原理 .............................................................92. III.
(5) 7.2. 7.3. 7.4. 三維平面校正法驗證與實測 .................................................92 7.2.1. 理論網格製備...............................................................92. 7.2.2. 理論網格校正步驟.......................................................94. 7.2.3. 理論網格校正之校正效果...........................................95. 7.2.4. 三維平面校正法實測...................................................97. 7.2.5. 實驗總結 .......................................................................98. 平面網格法與三維平面校正法之整合 .................................98 7.3.1. 整合校正法之步驟.......................................................98. 7.3.2. 整合校正法之校正效果...............................................99. 物距對扭曲校正之影響 .......................................................106 7.4.1. 實驗步驟 .....................................................................106. 7.4.2. 實驗結果 .....................................................................106. 第八章、結論與建議 ............................................................................112 8.1. 結論 .......................................................................................112. 8.2. 建議 .......................................................................................113. 參考文獻.................................................................................................114. IV.
(6) 表目錄 表 5. 1 設定值 X u - Y u 與逐步校正網格座標 X un - Y un 差異 ...................50 表 5. 2 設定值 X u - Y u 與逐步校正網格座標 X un - Y un 差異......................52 表 5. 3 設定值 X u - Y u 與逐步校正網格座標 X un - Y un 差異......................52 表 5. 4 設定值 X u - Y u 與逐步校正網格座標 X un - Y un 差異......................54 表 5. 5 設定值 X u - Y u 與逐步校正網格座標 X un - Y un 差異......................55 表 5. 6 亂數誤差之標準差為 0.1 pixel時校正效果 ..............................58 表 5. 7 亂數誤差之標準差為 0.01 pixel時校正效果 ............................59 表 5. 8 不同組數之平均扭曲中心 .........................................................60 表 5. 9 不同大小之亂數誤差對扭曲中心之影響 ..................................61 表 5. 10 設定值 X u - Y u ,不考慮扭曲中心偏移與考慮扭曲中心偏移時 求得之第n次校正網格座標 X un - Y un .......................................63 表 5. 11 扭曲中心偏移對扭曲係數及標準差之影響 ...........................64 表 5. 12 扭曲中心偏移對扭曲係數及標準差之影響 ...........................69 表 5. 13 傾斜1 時四種計算傾斜角度之比較 .......................................77 表 5. 14 傾斜10 時四種計算傾斜角度之比較 .....................................77 表 6. 1 不同組數時之扭曲中心 .............................................................83 表 6. 2 不同組數之平均扭曲中心及扭曲係數 K1 和標準差 ................84 表 6. 3 不同組數之平均扭曲中心及扭曲係數 K1 、 K 2 和標準差 .......84. V.
(7) 表 6. 4 扭曲中心計算有無之比較 .........................................................86 表 6. 5 不同焦距之影響(試驗一) .....................................................87 表 6. 6 不同焦距之影響(試驗二) .....................................................88 表 7. 1 平面網格法與整合校正法比較 ...............................................100 表 7. 2 僅用 K1 值校正Z方向標準差比較 ............................................102 表 7. 3 使用 K1 、 K 2 校正Z方向標準差比較 .......................................102 表 7. 4 使用 K1 、 K 2 校正Z方向標準差比較 .......................................104. VI.
(8) 圖目錄 圖 3. 1 物體表面之結構性斑紋與次級影像(網格)示意圖 .............12 圖 3. 2 物體表面上之次級影像變形前後相對位置示意圖 .................12 圖 3. 3 透鏡成像示意圖(童等,2009) ..............................................14 圖 3. 4 物距差造成的視差現象(施等,2009) .................................14 圖 3. 5 Z 軸變化示意圖 ..........................................................................17 圖 3. 6 感光元件平面及位移平面平行時之示意圖 .............................18 圖 3. 7 感光元件平面及位移平面不平行時之示意圖 .........................19 圖 3. 8 鏡頭扭曲示意圖(實線為原始圖形,內虛線為桶狀扭曲,外 虛線為枕狀扭曲) .....................................................................22 圖 3. 9 偏心扭曲之最大切線向扭曲軸及最小切線向扭曲軸 .............24 圖 3. 10 極座標示意圖(Hartley,2000) ...........................................29 圖 4. 1 實驗試體 ......................................................................................33 圖 4. 2 實驗配置圖 ..................................................................................34 圖 4. 3 架設精密XY平台、精密旋轉平台及相機放置處 ....................35 圖 4. 4 試體放置處 ..................................................................................35 圖 4. 5 電子測微計架設處 ......................................................................35 圖 4. 6 數值模擬各角度 N ba + N bc 之結果............................................37 圖 4. 7 理論感光元件偏差各位置 N ba - N bc 的值 ...............................38 VII.
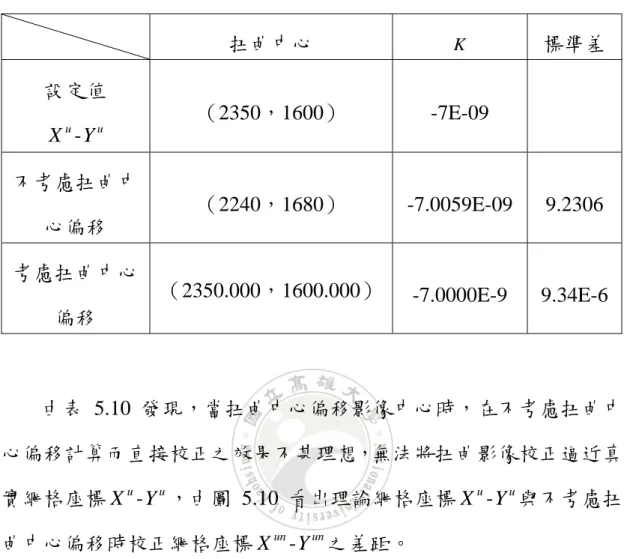
(9) 圖 4. 8 大偏移角度之 N ba + N bc ............................................................39 圖 4. 9 小偏移角度之 N ba + N bc ............................................................40 圖 4. 10 只取中心點分析 ........................................................................41 圖 4. 11 中心點正上方及正下方各取 5 點,間距為 10 分..................42 圖 5. 1 理論網格座標 X u - Y u 、扭曲網格座標 X d - Y d 以及扭曲中心.45 圖 5. 2 理論網格座標 X u - Y u 以及假設網格座標 X u - Y u ...................48 圖 5. 3 理論網格座標 X u - Y u ,影像網格座標 X d - Y d 及第 1 次校正網 格座標 X u1 - Y u1 ...........................................................................48 圖 5. 4 理論網格座標 X u - Y u ,影像網格座標 X d - Y d ,校正網格座標 X u1 - Y u1 以及最終校正網格座標 X un - Y un .................................49 圖 5. 5 扭曲係數 K 與迭代次數關係圖 .................................................50 圖 5. 6 標準差與迭代次數關係圖 .........................................................51 圖 5. 7 使用扭曲係數 K1 、 K 2 模擬僅用 K1 時之扭曲變形效果 ..........53 圖 5. 8 使用扭曲係數 K1 、 K 2 模擬僅用 K1 時之扭曲變形效果 ..........54 圖 5. 9 影像網格座標 X d - Y d 及加入誤差後座標 X d - Y d ..................57 u. u. 圖 5. 10 理論網格座標 X - Y ,影像網格座標 X d - Y d ,以及不考慮扭 曲中心時求得之第 1 次校正網格座標 X u1 - Y u1 和第n次校正網 格座標 X un - Y un ...........................................................................62 圖 5. 11 扭曲中心偏移影像中心距離對標準差(第n次校正)之影響. VIII.
(10) .....................................................................................................65 圖 5. 12 扭曲中心偏移影像中心距離對校正程度之影響 ...................65 圖 5. 13 扭曲中心偏移影像中心 1%示意圖 .........................................66 圖 5. 14 扭曲中心偏移影像中心 10%示意圖 .......................................66 圖 5. 15 扭曲中心偏移影像中心 30%示意圖 ......................................67 圖 5. 16 扭曲中心偏移影像中心 50%示意圖 ......................................67 圖 5. 17 扭曲中心偏移影像中心 100%示意圖 ....................................68 圖 5. 18 扭曲中心偏移影像中心距離對標準差(第n次校正)之影響. .....................................................................................................70 圖 5. 19 扭曲中心偏移影像中心距離對校正程度之影響 ...................70 圖 5. 20 扭曲中心偏移影像中心 10%示意圖 ......................................71 圖 5. 21 扭曲中心偏移影像中心 50%示意圖 ......................................71 圖 5. 22 扭曲中心偏移影像中心 100%示意圖 ....................................72 圖 5. 23 趨勢線示意圖 ...........................................................................74 圖 5. 24 扭曲中心最近之上趨勢線示意圖 ...........................................74 圖 5. 25 扭曲中心最近之下趨勢線示意圖 ...........................................75 圖 5. 26 扭曲中心之鉛直線與扭曲中心至最近點之夾角示意圖 ........76 圖 5. 27 各點連線圖 ................................................................................76 圖 6. 1 試體網格 .....................................................................................79 圖 6. 2 實驗配置圖 .................................................................................81. IX.
(11) 圖 6. 3 網格節點座標定位圖 .................................................................82 圖 6. 4 各焦距及其標準差關係圖 .........................................................89 圖 6. 5 試驗一、試驗二之各焦距與扭曲中心座標關係圖 .................90 圖 6. 6 焦距 55 mm時之影像 .................................................................91 圖 7. 1 原始影像之三維平面座標圖 .....................................................93 圖 7. 2 回歸平面之三維平面座標圖 ......................................................93 圖 7. 3 大範圍內不同 K1 值對應之兩平面各節點Z方向差值之標準差 及兩平面中心點Z方向差值.......................................................96 圖 7. 4 不同 K1 值對應之兩平面各節點Z方向差值之標準差及兩平面 中心點Z方向差值(迭代十次後)局部放大圖 ......................96 圖 7. 5 同 K1 值對應之兩平面各節點Z方向差值之標準差及兩平面中 心點Z方向差值(迭代十次後)局部放大圖 ..........................97 圖 7. 6 整合校正法之校正步驟流程 ...................................................105 圖 7. 7 不同物距對應之扭曲係數 K1 ...................................................107 圖 7. 8 不同物距對應之扭曲係數 K 2 ...................................................107 圖 7. 9 不同物距對應不同校正法之標準差 ........................................108 圖 7. 10 不同物距對應不同校正法之標準差(4 組) .......................109 圖 7. 11 不同物距時之X方向傾斜斜率................................................110 圖 7. 12 不同物距時之Y方向傾斜斜率 ...............................................110. X.
(12) 圖 7. 13 不同物距對應不同校正法之標準差(中心物距) ..............111. XI.
(13) 數位影像相關係數法於鏡頭扭曲校正之應用. 指導教授:童士恒 博士 國立高雄大學土木與環境工程學系 學生:蔡福泰 國立高雄大學土木與環境工程學系碩士班 摘要. 近年來,土木工程在許多地方開始使用數位影像量測的方式,取代傳統的量 測方法,因為利用數位影像量測,僅需相機及架設相機之相關設備,不需要對拍 攝物體作太多的處理,不必因應不同的量測物體而使用多種不同的量測器具,亦 不會產生破壞,即可利用電腦處理分析影像之數據。而影像量測中最常見之問題 為鏡頭的徑向扭曲,會使影像產生桶狀或枕狀變形,使得影像座標偏離原始座 標。因此需進行鏡頭扭曲校正,方能確保此方法的量測精準度,此為數位影像量 測之一重要研究課題。 過去在校正徑向扭曲時,皆是以影像中心為扭曲中心進行校正還原,沒有考 慮到真正的扭曲中心可能會偏離影像中心,如此可能會影響到校正之效果。因此 本研究針對扭曲中心偏離影像中心之影響進行探討並改良扭曲中心之計算方式。 此外,本研究利用數位影像相關係數法原理進行分析,同時以二維平面網格 校正法及三維立體平面校正法進行校正並比較兩者的效果,比較後發現使用平面 網格法會遇到試體有在空間中歪斜的三維問題需解決,而使用三維平面法則是尚 無校正效果較好之五次式方程式求解,因此本研究提出將此二法結合使用互補其 不足的整合校正法。 分析結果顯示,整合校正法在二維平面時 XY 方向之標準差,以及三維平面 XII.
(14) 對應節點座標 Z 方向差之標準差,皆可比單獨使用平面網格校正法亦或三維平面 校正法有更好的校正效果,有效降低標準差。. 關鍵字:數位影像相關係數法、鏡頭扭曲、徑向扭曲、扭曲中心. XIII.
(15) Application of Digital Image Correlation Method to Calibration of Lens Distortion Advisor: Dr. Tung, Shih-Heng Institute of Civil and Environmental Engineering National University of Kaohsiung Student: Tsai, Fu-Tai Institute of Civil and Environmental Engineering National University of Kaohsiung. ABSTRACT. In recent years, instead of traditional measurement method, digital image measurement technique has been widely used in civil engineering. The utilization of digital image measurement technique has many advantages such as it needs only cameras and equipment to fix cameras, no complicated treatment is necessary for the observed objects, this method is suitable for different objects and it will not damage the observed objects. However, lens radial distortion is a common problem in the digital images measurement technique. Lens radial distortion can result in barrel- or pincushion-shape deformation and cause the image coordinates to diverge from its’ original coordinates. Therefore, how to calibrate the lens distortion to ensure the accuracy of this technique is an important research topic. In the past, most researches assume that the center of distortion locates at the center of the image while calibrating radial distortion. Ignoring the possibility that the center of distortion can deviate from the image center can affect the effect of. XIV.
(16) calibration. Therefore, this study discusses how the calibration result will be affected when the center of distortion diverges from the center of image, and an improved method to compute the center of distortion is proposed. In addition, this study uses the theory of digital image correlation method to in the process of calibration analysis. Both the two dimensional planar grid calibration and the three dimensional plan calibration are discussed in this study. It is found that the specimen plan does not parallel to camera in 3D space can seriously affect the result while using the 2D planar grid calibration. Furthermore, there is still no five-order model while using the 3D plan calibration. Therefore, we combined the 2D and the 3D calibration methods into the integrating calibration. When compared with the results yielded by using the 2D planar grid calibration and the 3D plan calibration methods, the results show that using the integrating calibration can effectively improve the accuracy of coordinates in all three directions.. Keywords: Digital Image Correlation method, Lens Distortion, Radial Distortion, Center of Distortion. XV.
(17) 第一章、前言 1.1 研究動機 在土木工程中,探討材料的力學行為是基本的研究,其中以計算 應力應變來探討材料性質占大多數,然而量測應力應變在不同材料亦 有不同方法。早期在量測應變時,會使用應變計裝置在材料變形的地 方,但是此方法可應用在一般尺寸試體上,當試體尺寸過小時則無可 用之應變計。而在研究大面積應變場變化時,要架設大量的應變計有 相當的難度,也不一定能夠完整的擷取到需要的資料點,因此近年來 有以拍攝影像的方法來記錄試體變形前後的影像,並利用影像處理來 計算變形量。 然而在使用一般數位相機拍攝影像時,都會遇到影像變形的問 題,使得影像圖片中原始物體直線的部份會有彎曲變形的情況產生, 此現象即為鏡頭扭曲,此情況對於精密量測的實驗有很大影響,若不 將此情形去除將會造成極大誤差產生。因此如何將鏡頭扭曲的現象去 除,還原成理論的影像圖片以供測量實驗使用為一個重要的研究課 題,也為本研究之主要內容。 過去多數的研究中都假設扭曲中心在影像中心,只求取扭曲係數 進行校正,本文亦考慮到扭曲中心偏移的可能性,並探討扭曲中心對 於扭曲校正之影響。. 1.
(18) 1.2 研究目的 在以數位影像相關係數法進行各種量測時,由於大部分實驗都是 使用數位影像擷取裝置來拍攝影像,而數位影像擷取裝置的鏡頭是由 一群透鏡組合而成,依焦距不同會產生不同的影像扭曲情況,結果會 造成桶狀扭曲和枕狀扭曲兩種變形。影像產生扭曲情況,會對於使用 影像量測應用的實驗產生誤差,所以需要進行影像校正以降低誤差。 依照扭曲變形理論,影像最大的扭曲為徑向扭曲,欲校正徑向扭 曲時需求得扭曲中心及扭曲係數。而過去,進行扭曲校正時多假設扭 曲中心位於影像中心,而計算扭曲係數所需之記號座標的定位方式多 未交待,定位之精度可能不佳而影響校正結果。近年來數位影像相關 係數法已被廣泛的應用在許多不同領域的量測上,其定位精度可達. 0.01 像素,因此,本研究之目的在於探討扭曲中心的影響及利用數位 影像相關係數法進行定位並進行扭曲係數的計算。. 1.3 研究方法 為 探 討 扭 曲 中 心 的 影 響 , 本 研 究 使 用 Parameter-Free Radial. Distortion Correction with Center of Distortion Estimation 文中提到之方 法加以改良,找到最可能的鏡頭扭曲中心,此方法亦需要確定許多參 考點的座標,本研究先製造出人造網格,並將網格結點定為參考點, 為了進行這些參考點的定位,本研究利用數位影像相關係數法進行定 2.
(19) 位,再利用上述方法求取鏡頭扭曲中心。 在求取扭曲係數部分則以兩種方法進行,第一種方法利用上述網 格的參考點在影像上所呈現的扭曲座標及原始未扭曲的實體座標進 行計算;第二種方法是利用三維數位影像量測技術進行,原理在於扭 曲後的影像用於建立一平面的三維座標時,所得到的三維形狀會呈現 碗狀,此方法則在找一能將此碗形校正回為一平面的校正係數。 確立理論的扭曲校正之流程後,便可使用於實際拍攝之影像去做 扭曲校正分析,並探討本研究所提校正方法的實用性,詳細方法將於 第七章做完整的說明。. 1.4 研究架構 本文共分八章探討鏡頭扭曲影像校正之研究,各章內容簡述如 下: 第一章 前言 說明研究動機、目的、方法及架構。 第二章 文獻回顧 針對數位影像相關係數法和鏡頭扭曲校正相關的研究及目前 發展情形作一簡單的說明。 第三章 研究方法與實驗規劃. 3.
(20) 介紹數位影像相關係數法以及扭曲校正的相關理論,數位影 像相關係數法的部份會說明其計算方式,以及中心點平均位 移法,而扭曲校正的部份分為扭曲中心以及扭曲係數兩部份 介紹。 第四章 相機與平移拍攝移動方向之平行實驗 本章介紹平行實驗的實驗規劃,以及討論實驗後分析其結果 與比較討論。 第五章 平面網格法之驗證 本章將利用自製的理論座標進行扭曲校正,探討實驗所使用 方法對校正效果之影響,最後對理論分析的結果做比較說明。 第六章 平面網格法實測誤差之探討 將前一章所使用的理論分析方法使用於實際拍攝,並對不同 情況拍攝做比較及討論。 第七章 三維平面之扭曲校正 本章利用三維數位影像相關係數法之原理將扭曲平面校正, 且將平面網格法與三維平面校正法整合,找到能夠更有效計 算扭曲係數並且降低標準差之方法。 第八章 結論與建議. 4.
(21) 第二章、文獻回顧 本章文獻回顧的部份,分成兩大部分來介紹,先是數位影像相關 係數法的相關研究介紹,接著扭曲校正的部份再細分為扭曲係數跟扭 曲中心兩部份,最後整理討論。. 2.1 數位影像相關係數法 數位影像相關係數法(Digital Image Correlation method,DIC) 以“找尋演算法”為基礎,利用數位影像相關係數,比對兩張影像的局 部相關性,以此相關性判定變形前後影像中局部的對映關係。利用有 限元素法的概念將變形前後之試體分割成小網格,藉著比較變形前後 網格內灰階值之相關性,在變形後影像中尋找變形後網格的相對位 置。經由變形前後網格的相對位置,即可計算出各網格之應變量。以 下為DIC的發展與應用之相關研究:. (1) Peters et al(1982)提出利用計算機分析物件受力前後之數位影 像,求得表面位移量與應變的方法。. (2) Chu et al(1985)提出以結合變形理論及數位影像相關係數法之量 測技術,及以內插理論來擴展此技術之應用範圍,並以實際案例 來驗證此技術之實用性。. (3) Bruck et al(1989)提出用Newton-Raphson 法取代coarse-fine 法 來尋求最佳之變形參數,以推求位移和位移梯度,此法可以在不 影響精度的情形下節省大量的運算時間。. (4) Sutton et al(1991)所發表的研究中指出,一般量測之資料都有雜 訊,因此他們提出了一個能在分析時降低雜訊影響的方法,另外 5.
(22) 文中亦提到數位影像相關係數法所得之量測資料的雜訊小於0.01 個像素(pixel)。. (5) Lu et al(2000)對於以影像關係法進行應變分析時,使用高次內 插函數模擬位移場以考慮高次位移項之梯度的影響進行探討,實 驗結果顯示在小變形時,忽略二次位移項之梯度影響不大,但忽 略二次位移項之梯度的誤差會隨著變形的增加而愈來愈大。. (6) Vellinga et al(2000)所發表的研究中提到,由於數位影像相關係 數法之解析度只與像素有關,與實際之長度大小無關,所以結合 掃瞄式電子顯微鏡與數位影像相關係數法,成功的觀測到微小範 圍內的應變,換算成實際空間中的長度,其量測到的位移大約是 微米等級,並認為有可能達到次微米的解析度的發展空間。. (7) Dost et al(2003)結合了原子力顯微鏡與DIC技術,解析出了奈米 級的位移,因此進而可以觀察到奈米等級的裂縫。. (8) Lopez-Anido et al(2004)提出以兩台高解析度CCD鏡頭試驗性的 進行三維的DIC量測,此法成功判別出複合材料間各材料行為的差 異。. (9) Tung et al(2005)利用DIC量測鋁單晶體在壓力作用下的應變解 析,其軸向上的位移誤差值為0.004個像素。. (10) Lecompte et al(2006)的研究提出了不同大小的分析網格和不同 尺寸的斑點記號之間的關係對DIC分析精度的影響,並建議提出建 立二者間函數關係以提高DIC分析的精度。. (11) Tung et al(2009)的研究利用一台相機進行三維DIC量測,應用 於岩石節理面粗糙度(JRC)之量測。 6.
(23) (12) Shih et al(2010)的研究中利用一台攝影機,對於一懸臂樑之模 態可利用DIC量測出是否有缺陷。. 2.2 鏡頭扭曲校正 2.2.1. 扭曲係數. 早期的影像校正,發現鏡頭扭曲之變形與其座標點到中心的距離 呈現函數關係,稱之為徑向扭曲。但在某些情況下,無法單一使用徑 向扭曲關係式完全校正扭曲情況,之後研究為了更準確之校正結果, 因此加入了不同參數改善校正效果。. (1) Slama et al ( 1980 )把鏡頭扭曲主要分成了徑向扭曲( Radial distortion)還有偏心扭曲(Decentering distortion),往後之研究大部 分都以此分類探討。. (2) Weng et al( 1992)的研究中,除了上述提到之徑向扭曲(Radial distortion)和偏心扭曲(Decentering distortion) 之外,增加了薄菱鏡 扭曲(Thin prism distortion),使鏡頭扭曲模型變得越來越複雜,主 要目的是希望能夠更精確的校正影像扭曲,但是絕大部分的校正 方法都會使用到多次迭代運算讓數值收斂以逼近得到我們要的答 案,但是使用越複雜的模型時相對的也會更加的困難與耗時。. (3) Tsai et al(1987)發表的研究中提出,在實驗經驗中發現在越複雜 越高次方項的模型裡,越容易造成數值不穩定,如果適用於工業 機器視覺應用或是其他較不需精密度的用途時,可以只考慮到徑 向扭曲的影響,也不需用到太高次方項的模型,即可較有效率快 速的校正鏡頭扭曲。 7.
(24) (4) Xu et al(2006)提出利用迭代法收斂,將原先直線排列的點重新 校正成直線排列,找出扭曲係數校正扭曲的影像。 (5) Hartley et al(2007)提出一個新的扭曲方程式,將扭曲係數的部 份由多項式簡化成單一個參數。這個方法不需用到迭代法也不需 使用特定的徑向扭曲模型,更快速也簡化了許多問題,實驗結果 證實可應用於窄角度至廣角魚眼鏡頭皆可使用。. 2.2.2. 扭曲中心. 在以往的扭曲校正研究中,假設鏡頭扭曲的變形都是以影像中 心,也就是影像圖片的正中心點為變形的原點。在 2007 年 R. Hartley 等人提出了扭曲中心的概念,認為扭曲中心並不一定等同於影像中 心,經由實驗證實,扭曲中心可能在許多情況下會有些許偏離中心的 情況產生,這對於要求高精度的實驗研究應用可能會有很大的誤差產 生。所以在做扭曲校正之前,先行求得真正的扭曲中心,可以幫助建 立更準確更理想的扭曲模型。而相關的研究以及後續發展應用整理如 下:. (1) Hartley et al(2000)研究中探討相機內部參數,定義在兩個視角 下相機座標系統在極座標轉換,其轉換的關係矩陣為 F 基礎矩 陣, F 基礎矩陣計算的方法很多,其中以奇異值分解法(Singular. Value Decomposition,SVD)最為快速方便使用。並且定義兩座 標系統的相機中心連線交於成像平面之點為極點 e ,並且推導出 極點 e 與 F 基礎矩陣之關係式。. (2) Hartley et al(2007)研究中提出一個新的扭曲方程式,不需用到 8.
(25) 迭代法也不需使用特定的徑向扭曲模型,快速且簡化許多問題, 實驗結果證實可應用於窄角度至廣角魚眼鏡頭皆可使用。同時提 出了扭曲中心偏移的概念,認為扭曲中心等同於影像中心為不安 全的假設,經實驗證實,扭曲中心可能在許多情況下會有些許偏 離中心的情況產生。在此研究中利用先前極座標轉換的理論,定 義扭曲中心即為極座標轉換裡面的極點 e ,由極點 e 與 F 基礎矩陣 之關係式即可求得扭曲中心。. 2.3 文獻總結 數位影像量測技術為一新興之技術,近來由於數位相機之快速發 展,使得以此方法進行量測所需之成本大幅下降、精度日益提高,並 且可以分析全場應變分佈,為一適合推廣之應變解析技術,除此之 外,此實驗分析技術亦是數值計算驗證之有效工具。此外,數位影像 相關係數法也慢慢的被應用在三維的研究上面。 由於利用數位相機拍攝影像可能會導致成像的扭曲,排列在一直 線上的點在有鏡頭扭曲後不再成一直線排列,因此為了提高數位影像 相關係數法的準確度,必須要校正鏡頭扭曲。 各文獻所使用之研究方法不盡相同,多會利用已知點的成像位置 做為校正依據,因此校正的成效會受到已知點位精度的影響。然在前 人研究中對於所需之點位的定位方式多未敘述,因為數位影像相關係 數法之定位精度相當高,因此本研究擬以數位影像相關係數法進行定 位,並以所定出之點位進行扭曲校正。在扭曲校正時會有兩個參數需 要決定,此兩參數為扭曲中心與扭曲係數,在過去的文獻中並未見到 9.
(26) 有關扭曲中心對校正成效影響之相關討論,因此本研究亦將對其影響 進行討論。此外三維數位影像相關係數法可進行三維座標的量測,因 此本研究也將應用三維數位影像相關係數法於扭曲校正,以提高扭曲 校正的成效。. 10.
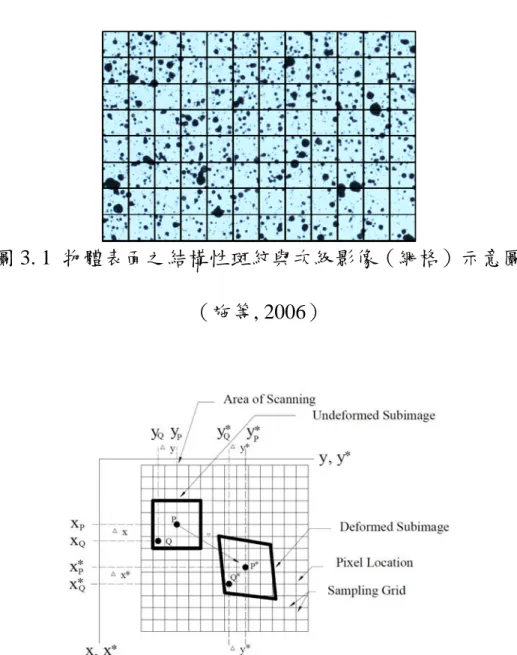
(27) 第三章、研究方法 本章介紹所使用之研究方法,首先是介紹數位影像相關係數法 的原理,接著是調整相機感光元件與平移方向平行的方法,最後是扭 曲校正中扭曲係數及扭曲中心的計算方式。. 3.1 數位影像相關係數法 3.1.1. 二維數位影像相關係數法. 數位影像相關係數法的基本原理,主要是利用分析物體表面的灰 階分佈特徵,對變形前後的影像進行特徵的比對來獲得變形前後影像 的相對位置,並藉此相對位置計算出影像中任一位置的位移向量,其 它物理量如應變場、剪應變和 von Mises 應變都可以利用此位移向量 求得。 數位影像相關係數法常應用於影像識別技術等相關領域,其主要 是以物體表面上的結構性斑紋為影像特徵,結構性斑紋如圖 3.1 中散 佈的黑色斑點所示,此特徵則被用來做為分析比對變形前後兩張影像 局部相關性的依據。我們以變形前後兩張影像的局部相關性為目標函 數,此相關性影響變形前後兩張影像的局部對應函數,故以對應函數 的參數為最佳化的變數,以數值方法進行最佳化求解,即當局部相關 性最佳時,其對應函數的參數就是最接近實際值的參數,茲以圖 3.2 為例說明其對映關係,圖中變形前中心點位置在點 P ,變形後點 P 位 置改變為 P * ,兩者之間的函數關係如式(3.1)、(3.2)所示:. x* x u ( x , y ). (3.1). y * y v( x , y ). (3.2). 11.
(28) 圖 3. 1 物體表面之結構性斑紋與次級影像(網格)示意圖 (施等, 2006). 圖 3. 2 物體表面上之次級影像變形前後相對位置示意圖 (施等, 2006). 對於未變形的影像,可以利用有限元素法的觀念將其分割成數個 次級影像,如圖 3.1,圖中一個方形的格子即代表一個次級影像。假 設變形前影像為影像 A,變形後影像為影像 B,二者之間存在著前述 的對映關係,則我們可以用數位影像相關係數來判定二者間的相關程 度,數位影像相關係數的定義(施等, 2006)如下式:. 12.
(29) COF . g g g g ij. 2 ij. ij. 2. (3.3). ij. 其中, g ij 及 g ij 分別為影像 A 在 i, j 座標上及影像 B 在 i , j 座 標上的灰階值,而 i , j 座標為影像 A 上 i, j 座標依函數計算後所得 在影像 B 上之對應座標。 以最佳化程序求解出每一個次級影像的最大相關係數來決定對 應函數的最佳參數,即可獲得次級影像變形前後的相對應座標,再運 用這些相對應座標即可計算出個別的位移量,進而獲得位移場與應變 場。. 3.1.2. 三維數位影像相關係數法. 藉由平面影像技術拍攝出來的影像無法獲得三維空間的資訊,若 要使用平面影像來建立三維的座標系統則至少需要兩台相機在不同 位置同時拍攝的影像。因為兩張影像是在不同的位置所拍攝的,所以 各自擁有獨立的座標系統;若要將兩個獨立的座標系統套疊在同一個 三維座標系統中會有相對平移和相對旋轉的問題,必須經過一些座標 轉換參數的修正和回歸率定的程式才可由這兩個相關但獨立的座標 系統建立出三維的座標系統,童等人在 2009 年及 2010 年的研究中提 出簡化的三維數位影像相關係數法,此方法的原理如下所述。. (1) 針孔成像原理 因光的直線性,當光線穿透一小孔時,會使物體的倒像,成像在 孔後的面上,如圖 3.3 所示:. 13.
(30) 圖 3. 3 透鏡成像示意圖(童等,2009). 推導公式: L. q l p. 其中,L 為成像長度,l 為物體長度,P 為物距,f 為焦距. 圖 3. 4 物距差造成的視差現象(施等,2009). 14. (3.4).
(31) 假設相機向右平移(或物體向左平移)已知長度為 e 。則較近的 a 點在感光元件中的平移量為 AA ;較遠的 b 點在感光元件中的平移量 為 BB 。由幾何關係知,. q AA e pa . (3.5). q BB e p B. (3.6). 因為影像在感光元件上的平移量只能以像素表示,所以式(3.5)應 改寫為下式比較方便:. q N AA e pa 其中 為單位元感光元件長度的像素數,單位元為 pixels. (3.7). mm. ;. N AA 為 a 點在影像上(像點 A)的平移量,以圖元為單位元。由於 與像距 q 的正確值無從得知,可以將其組合為單一待率定常數 ,所 以定義. q. (3.8). 且改寫式(3.8)為. . N AA pa e. (3.9). 理論上,利用由式 (3.9)代入一個已知物距 pa 和它在影像上的位 移量 N AA 以及實驗控制上的相機或物體實體平移量 e ,便可求得參數. 值。此後便可以用下式求任意點的物距:. 15.
(32) pb . e N BB. (3.10). 有了物距,物體相對於相機透鏡中心的水準及鉛垂座標 ( x, y ) 便 可輕鬆求得。但是,實際上沒有任一點的物距是可以確定的,其原因 是相機透鏡的中心點無法確定,也沒有辦法量測任一點的實際物距。 所以有必要另外推導一個率定參數 值的方法。 假設有 m 個事先精密量測過相對於點 a 物距差的點 i,並定義物 距差( i )為點 i 到點 a 連線在視軸上的投影長度。所以,. i pi pa , i 1 m. (3.11). 其中, pi 為第 i 個已知點(點 i)的物距。將式(3.10)代入式(3.11),得. N N II i AA e N N AA II . (3.12). 故可再將參數 表示成已知的物距差與影像位移量的函數,如下. . i N AA N II e N AA N II . (3.13). 依式 (3.13)只要一個已知物距差,便足以率定參數 值。但考慮 實驗上不可避免的誤差,應該多求幾個點,再以其平均值為率定參 數,如下 m. . i 1. m. i. (3.14). (2) 修正 X、Y 座標 率定參數時 Z 方向座標會有不同的設定位置,即會因為物距不同. 16.
(33) 而導致同一點的成像位置不同,因而需要修正座標位置以確保分析正 確。. 圖 3. 5 Z 軸變化示意圖. 原理: 當相機水準平移 e 時點 a 的像點之水準平移圖元數為 N AA ,依相 似三角形關係可知,若點 a 相對於透鏡中心的水準座標為 xa ,則其與 相片水準座標 X A 符合下列關係:. xa e X A N AA. (3.15). X Ae N AA. (3.16). 故移項得. xa . 17.
(34) 同理. ya . YAe N AA. (3.17). 針對上述幾何成像問題進行影像座標中 X 方向與 Y 方向校正, 將點分析得到的 ( xa , ya ) 數據帶入上式可得校正後的 X 座標與 Y 座 標,校正後之座標以表示之。. 3.2 感光元件平面及位移平面之平行 當感光元件平面及位移平面相互平行時,如圖 3.6 所示,依據式. (3.4)成像公式,點 a 移動至點 b,點 c 移動至點 b,距離皆為 e,此時 的點在影像中之位移 Nba 及 N bc 也會相等。. 圖 3. 6 感光元件平面及位移平面平行時之示意圖. 18.
(35) 而當感光元件平面及位移平面不平行時,如圖 3.7 所示,點 a 及 點 c 移動至 b 點距離亦為 e 時,此時點在影像中之位移 N ba 及 N bc 會 跟平行時之 N ba 及 N bc 有所不同,且會隨著感光元件偏移角( )不同 而改變。. 圖 3. 7 感光元件平面及位移平面不平行時之示意圖. 圖 3.7 假設物體位移平面未偏移,只有感光元件偏移 角,且像 距 q 固定,物距 p 因感光元件偏移而成 p ' ,其中 p ' 為:. p' . p cos. (3.18). 而感光元件偏移一角度 時, aO 與視軸 bO 夾角 ,利用正弦定 理及餘弦定理,以圖 3.7 中△abO 看: 19.
(36) e aO sin sin( ) 2. (3.19). 其中 aO 以餘弦定理推導,將式(3.19)改寫成. e 2 p '2 2ep 'cos e 2 sin sin 2 . (3.20). 經移項後可得 角為. e sin 2 1 sin 2 2 e p ' 2ep 'cos 2 . (3.21). 同理 以△bcO 來看為:. e sin 2 1 sin 2 2 e p ep ' 2 'cos 2 . (3.22). 因感光元件偏移 角,視軸也隨之偏移 角,且此時 cb 及 ab 之在 感光元件中投影分別為 e1 及 e2,其中 e1 以圖 3.7△a’bO,e2 以△bc’O 來看,可寫成:. e1 sin . p' sin 2 . (3.23). 經移項後,改寫式(3.23)成. e1 p 'tan . 20. (3.24).
(37) 同理,e2 可寫成. e2 p 'tan . (3.25). 以式 (3.4) 成像公式得到感光元件偏移 後,點在影像中之位移. N ba 及 N bc 。並乘上 , 為單位感光元件長度的像素數,單位為 pixels mm. ,所以 N ba 可表為:. N ba q e1 p'. (3.26). N ba . qe1 p'. (3.27). N bc . qe2 p'. (3.28). 移項後改寫為. 同理,可得知 N bc 為. 由圖 3.6 及圖 3.7 可看出,當感光元件平面及位移平面平行時, 因為距離相機遠近相同所以 N ba 應等於 N bc ;而當感光元件平面及位 移平面不平行時, N ba 及 N bc 值會因物體距離相機遠近不同而有所差 異,因此可利用不同角度所求得之 N ba 及 N bc 值找出其相關性,並調 整至平行之角度。. 3.3 鏡頭扭曲影像校正 3.3.1. 鏡頭扭曲. 由於實驗使用之單眼數位相機鏡頭組是由一群透鏡組合而成,加. 21.
(38) 上像點與光軸之距離不同,其側向放大率亦隨之不同,物體影像的中 心會有同心圓放射狀的現象發生,因此影像會產生鏡頭扭曲的情況。 有桶狀扭曲和枕狀扭曲兩種類型如圖 3.8 所示,一般常見的為桶狀扭 曲。. 圖 3. 8 鏡頭扭曲示意圖(實線為原始圖形,內虛線為桶狀扭曲,外 虛線為枕狀扭曲). 3.3.2. 扭曲係數. 在扭曲校正的實驗中,通常需要求得扭曲係數以還原影像,而扭 曲係數會因扭曲方程式定義不同而異,在此引用 Weng 等 1992 年提 出之扭曲方程式,表示如下:. u u u u v . (3.29). v v v u v . (3.30). 22.
(39) 其中 u v 為理想影像座標(無扭曲) , u v 為拍攝影像座標(有扭 曲) , u v 為 u 、 v 方向之鏡頭扭曲變形量。 在 Weng 等之研究中扭曲方程式考慮的扭曲類型有下列三種:. (1) 徑向扭曲(Radial distortion) 鏡頭扭曲絕大部分是因為徑向扭曲的關係,其所造成之扭曲變 形,會沿著由中心點往外發散的徑向直線,使影像變形移動,令座標 點拉近中心或是遠離中心。 徑向扭曲是徑向距離的函數,在任何角度都是一樣,所以徑向扭 曲也是一個對稱的扭曲,也叫做輻射扭曲。扭曲變形的程度為座標點 到中心距離的函數,其方程式如下:. r k1r 3 k2 r 5 k3r 7 . (3.31). u r cos . (3.32). v r sin . (3.33). r 為徑向扭曲變形量, r 為到中心之距離, 為座標點與 u 軸之夾 角,在此扭曲變化僅考慮至三次式表示,因此僅用 K1 校正,亦可依 不同實驗精度需求增加至五次式以上,使用 K1 、 K 2 校正。接著由式. (3.29)到式(3.33),徑向扭曲之變形量可表示為:. ur k1u u 2 v 2 . (3.34). vr k1v u 2 v 2 . (3.35). 23.
(40) k1 即為徑向扭曲係數。. (2) 偏心扭曲(Decentering distortion) 偏心扭曲是由於不完善的鏡片所造成的,它不是一個直接關係到 鏡頭設計師的問題,這是一個發生在製造時的缺陷。. 圖 3. 9 偏心扭曲之最大切線向扭曲軸及最小切線向扭曲軸 (Weng,1992). 偏心扭曲所造成像點位移的方向垂直於徑向線,造成所有的通過 中心點的徑向線彎曲變形,所以偏心扭曲包含了徑向扭曲以及切線向 扭曲。唯有某一個方向上的徑向線沒有變形的情況,這條線即被稱為 最小切線向扭曲軸,而與其垂直的則為最大切線向扭曲軸,如圖 3.9 所示,其偏心扭曲之變形量如下:. 24.
(41) . d. d 3 j1r 2 j2 r 4 sin 0 . (3.36). td j1r 2 j2 r 4 cos 0 . (3.37). td 分別為偏心扭曲變形量的徑向扭曲分量及切線向分量,. j1 j2 為偏心扭曲係數,0 為最大切線扭曲軸與正 u 軸之夾角。再將. . d. td 轉換至 u 軸與 v 軸上 ud cos vd sin . sin d cos td . (3.38). 由於 cos u / r 和 sin v / r ,再令 p1 j1 sin 0 以及 p2 j1 cos 0 , 將上式表示如下:. ud p1 3u 2 v 2 2 p2uv. (3.39). vd 2 p1uv p2 u 2 3v 2 . (3.40). p1 p2 即為偏心扭曲係數。 (3) 薄菱鏡扭曲(Thin prism distortion) 薄菱鏡扭曲跟偏心扭曲一樣,是由於不完善的鏡片所造成的,也 是一個發生在製造時的缺陷,不同的是偏心扭曲是因為光學系統中組 件不同角度的偏心,鏡片組的光學中心不是完全的共線所導致的;而 薄菱鏡扭曲是因為鏡片組件或是感光元件等些微的傾斜所造成的。 薄菱鏡扭曲會造成類似偏心扭曲的影像變形,如圖 3.9 所示,也包含 了徑向扭曲以及切線向扭曲,其薄菱鏡扭曲之變形量如下:. p i1r 2 i2 r 4 sin 1 25. (3.41).
(42) tp i1r 2 i2 r 4 cos 1 . (3.42). 1 為 最 大 切 線 扭 曲 軸 與 正 u 軸 之 夾 角 , 令 s1 i1 sin 1 以 及 s2 i1 cos 1 ,將上式表示如下:. up s1 u 2 v 2 . (3.43). vp s2 u 2 v 2 . (3.44). s1 s2 即為薄菱鏡扭曲係數。 (4) 總鏡頭扭曲 結合上述三種鏡頭扭曲,總鏡頭扭曲變形量即為. u u v s1 u 2 v 2 p1 3u 2 v 2 2 p2uv k1u u 2 v 2 . (3.45). up u v s2 u 2 v 2 2 p1uv p2 u 2 3v 2 k1v u 2 v 2 (3.46) 令 g1 s1 p1 , g 2 s2 p2 , g3 2 p1, g 4 2 p2 ,整理後可表示如下:. u u v g1 g3 u 2 g 4uv g1v 2 k1u u 2 v 2 . (3.47). v u v g 2u 2 g3uv g 2 g 4 v 2 k1v u 2 v 2 . (3.48). g1, g 2 , g3 , g 4 , k1 即為總扭曲係數。. 偏心扭曲以及薄菱鏡扭曲皆為製造時可能產生之缺陷,在科技日 亦更新的現今,相機鏡頭製造公司的製作品質已大幅提升,產品瑕疵 的可能大大降低,所以這兩種扭曲類型的影響已可忽略。 因此本研究不需使用上述文獻所使用之複雜扭曲方程式,僅考慮. 26.
(43) 徑向扭曲變形時,本研究使用之扭曲方程式通式如下所示:. X d X 0 X u X 0 1 k1r 2 k2 r 4 . (3.49). Yd Y0 Yu Y0 1 k1r 2 k2 r 4 . (3.50). X d Yd 為有扭曲的拍攝影像座標, X u Yu 為無扭曲的理論影像座 標, X 0 Y0 為中心點座標, r 為 X d Yd 扭曲影像座標到中心 X 0 Y0 之距離, k1 k2 為徑向扭曲係數。. 3.3.3. 扭曲中心. 以往的扭曲校正研究中,假設鏡頭扭曲的變形都是以影像中心, 也就是影像圖片的正中心點為變形的原點,這樣不是安全的假設,因 為扭曲中心的座標在扭曲方程式中是很重要的參數,其中影像扭曲的 情況,為座標點到扭曲中心距離的函數,所以沒有考慮扭曲中心偏移 所造成的誤差,可能造成扭曲校正成效不佳。因此在求解扭曲方程式 之前求得真正的扭曲中心是很重要的。 產生扭曲中心偏離影像中心的原因,可能是因為鏡頭中心跟相機 感光元件中心的偏移量、感光元件或是鏡頭的些微傾斜、鏡頭鏡片組 合構件的中心軸線不一致,或是影像的裁剪,這些都可能是會產生鏡 頭扭曲中心偏離的原因。 本研究扭曲中心計算的方法,引用 Hartley 於 2007 年提出之方. 27.
(44) 法,Hartley 在其 2000 年的研究中定義極座標轉換之左極點即為所求 之扭曲中心,而左極點可由與極座標轉換中 F 基礎矩陣之關係求得, 以下為扭曲中心計算及 F 基礎矩陣之推導:. (1) 扭曲中心計算 在極座標系統中,如圖 3.10 所示,左右兩個相機系統對物體 X 拍 攝,其相機中心為 C、C,此三點所構成之平面稱之為極平面(epipolar. plane)。物體在成像平面上分別為 x 、 x ,而相機中心 C 、 C 連線交 於成像平面之點 e、e 即為極點(epipoles) ,此線段為基線(baseline) 。 而極平面交兩相機成像平面於兩線段 l 、 l 為極線(epipolar lines), 當物體 X 在空間中移動時, x 、 x 僅會在 l 、 l 上移動且 l 、 l 必定會 通過 e 、 e 。 在此極座標系統中, x 、 x 為由 X 投射於兩相機成像平面之點, 因此 x 、 x 可由一轉換矩陣 H 表示成此關係式. x H x. (3.51). l e x e x e H x Fx. (3.52). 而 l 的關係式. 對於任意點 x 所對應的極線 l ' Fx 都包含其極點 e ,因此 e 對所有的. x 皆滿足 e ' l ' e ' Fx e ' F x 0. 28. (3.53).
(45) 最後可得下式亦為極點與 F 基礎矩陣關係式:. e ' F 0. (3.54). Fe 0. (3.55). 在此定義 e 為所求之左極點。. l. epipolar line. epipolar line l. . epipole. e. e baseline. 圖 3. 10 極座標示意圖(Hartley,2000). (2) F 基礎矩陣之推導 在此引用 Hartley 於 2007 年之研究中的扭曲方程式來推導 F 基礎 矩陣,所使用的鏡頭扭曲方程式如下:. x d e xu - e . (3.56). 其中 x d 為影像平面上相機所拍攝到的扭曲影像座標, xu 為影像平面 上理論的無扭曲影像座標, e 為此影像圖片之扭曲中心, 為徑向扭 29.
(46) 曲係數。. x d e xu - e . (3.57). 式(3.57)同乘上一 3 3 斜對稱矩陣 e ,以及做座標轉換,. xu Hx c. (3.58). e x d e Hxc. (3.59). 其中 x c 為平面校正網格上已知之座標點, x u 為影像平面上理論的無 扭曲影像座標, H 為 x c 與 xu 之間的座標轉換矩陣,然後再同乘上. x d ,同時觀察到等號左邊 x d e x d 0 ,可得下式: 0 i xid e H xic. (3.60). 令式(3.60)其中 F e H ,可得常用基本矩陣之關係式:. xid Fxic 0. (3.61). 其中 F 稱之為徑向扭曲基礎矩陣,可用一些對應點的相關性計算出. F ,在此用八點演算法。 由 x d Fx c 0 知,兩張影像只要求得 F 即可找到對應點,. f11 令 x u , v,1 和 x d u d , v d ,1 , F f 21 f31 T. T. f12 f 22 f32. f13 f 23 f33 . 而每組對應點即可得一組方程式如下:. uu d f11 vu d f12 u d f13 uv d f 21 vv d f 22 v d f 23 uf31 vf32 f33 0 (3.62). uu. d. vu d u d uv d vv d v d u v1 f 0. 30. (3.63).
(47) d d d d d d uu vu u uv vv v u v1 . f11 f12 f13 f 21 f 22 0 f 23 f31 f32 f33 . (3.64). 帶入 n 組對應點時,可將上式改寫成線性方程式如下:. u1u1d u 2u 2 d Af d u n u n. v1u1d v2u2 d . u1d u2 d . u1v1d u2v2 d . v1v1d v2v2 d . v1d v2 d . vnun d. un d. unvn d. vn vn d. vn d. u1 u2 un. v1 v2 vn. f11 f 12 f 1 13 f 1 21 f 0 (3.65) 22 f 1 23 f 31 f32 f 33 . 線性方程式 Af 0 ,當代入 8 組對應點時 A 為 8 9 的矩陣,對 A 做奇 異值分解,令 A USV T ,其中 S 為對角線矩陣(diagonal matrix),. UU T I , VV T I ,可將矩陣改寫成 A U1. 0 V1T T U2 T U1V1 0 0 V2 . (3.66). 所以只要求得 V 矩陣的最後一行 V2 ,為可使 A 有最小奇異值的奇異向 量,即為 f ,求得 F 基礎矩陣。 有了 F 基礎矩陣再代回與極點之關係式,便可求得左極點座標, 31.
(48) 即為扭曲中心。. 3.3.4. 標準差. 求得真實扭曲中心後再計算扭曲係數,有了這兩個重要的參數便 可將扭曲之影像校正回理論無扭曲之影像,在此使用標準差來判斷校 正之效果。 而標準差的定義,為校正後之影像各網格節點座標,與理論無扭 曲之影像各網格節點座標在成像平面上的平均距離差值。當標準差越 大時,校正後之網格座標距離理論的座標差距越大,表示校正效果 差;反之標準差值越小時,校正後之網格座標越接近理論的座標,標 準差值趨近於零表示影像幾乎完全校正回理論無扭曲之座標,校正效 果好。. 32.
(49) 第四章、感光元件平面及位移平面之平行實驗 本章節為調整感光元件平面與位移平面平行之實驗,首先是此實 驗之實驗規劃,包括試體製備、實驗配置和實驗步驟,接著是研究方 法之理論驗證,證實此實驗方法可在理論解有效找到平行之位置後, 再應用在實際案例,並透過將裝置改良和修改取點方式提高此實驗之 可信度,最後是就此方法進行總結。. 4.1 實驗規劃 4.1.1. 試體製備. 以一平滑矩形鐵片,於其上均勻噴上一層白色的漆,再以黑色噴 漆噴上不規則形狀、均勻分布的黑色結構性斑紋,如圖 4.1 所示。. 圖 4. 1 實驗試體. 4.1.2. 實驗儀器與配置. 實驗儀器. (1) Canon EOS 50D 單眼數位相機 (2) Canon 60 mm 鏡頭 33.
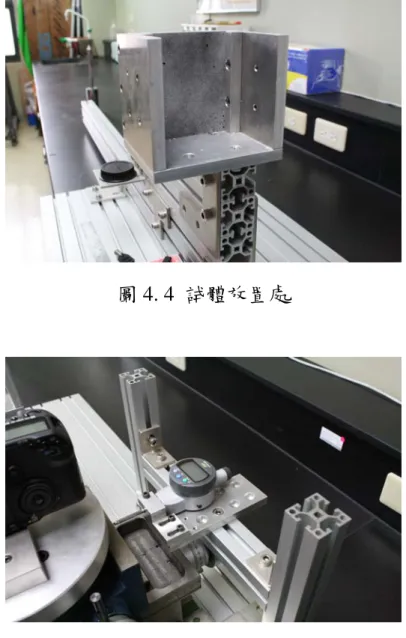
(50) (3) 精密 XY 向位移平台 (4) 旋轉精密平台 (5) 電子測微計(精度 0.001 mm) (6) 測微計(精度 0.01 mm) (7) 筆記型電腦. 實驗配置 由於相機除了要能平移和旋轉外,且須架設在試體的正前方,因 此實驗以如圖 4.2 所示整體配置進行。圖 4.3 為架設精密 XY 平台、 精密旋轉平台及相機放置處;圖 4.4 為試體放置處,為了使試體中心 與相機中心在同一高度,需架上鋁矩擠型塊於試體下,以便調整試體 的高度;圖 4.5 為電子測微計架設處,為了使 X 方向之位移精度提高, 因此在 XY 平台平行 X 方向架設一精度為 0.001 mm 的電子測微計。. 圖 4. 2 實驗配置圖. 34.
(51) 圖 4. 3 架設精密 XY 平台、精密旋轉平台及相機放置處. 圖 4. 4 試體放置處. 圖 4. 5 電子測微計架設處 35.
(52) 4.1.3. 實驗步驟. (1) 試體準備:以一平滑矩形鐵片,於其上均勻噴上一層白色的漆, 再以黑色噴漆噴上不規則形狀、均勻分布且記號分明的黑色結構 性斑紋。. (2) 試體架設:將試體放置於架構上,並固定於鋁擠型塊上。 (3) 相機架設:底層先放置 XY 位移平台,在 X 位移方向架設電子測 微計,再將精密旋轉平台固定在上,並於旋轉平台頂端架設相 機,位移及旋轉完全由相機這一側控制。. (4) 決定起始相機位置:以目測方式定出相機與試體平面大略平行角 度。. (5) 擷取影像:依預定偏移度數,轉動旋轉平台至各位置,擷取相機 平移前後之影像。. (6) 選點方式:取位移前影像之中心點座標,找出位移後影像對應的 座標;以及找出位移後影像中心點座標,對應至位移前影像的點 座標。. (7) 計算點在影像中位移:找出各位置位移前後點座標後,代入式 (3.27)、式(3.28)推導的部份,即可得到 N ba 及 N bc 值。 (8) 作圖:以各個角度之 N ba + N bc 值和 N ba - N bc 值為 Y 軸,各位置 之角度為 X 軸,個別將其相對應的關係圖畫出,並找到 N ba + N bc 值最大,或是 N ba - N bc 為零所對應的角度,即為需校正至平行 的角度。. 36.
(53) 4.2 中心點平均位移法驗證 假設將試體架設在距感光元件 480 mm 的位置(物距 p) ,使物體 ,並使鏡頭焦距固定為 60 mm (q) ,代入式(3.27)、 位移 10 mm (e) 式(3.28)中,其中 以各種不同角度代入,得出數值模擬之 N ba 及 N bc 值,接著再將 N ba 及 N bc 相加和相減作圖。 . N ba 及 N bc 相加 先是使用各位置 N ba 及 N bc 相加之值,角度從向左偏 5 度至向右. 偏 5 度,間格 1 度共 11 點,並在向左 1 度至向右 1 度之間取更小的 間隔,畫出各位置相對應的 N ba + N bc ,如下圖 4.6 之數值模擬結果:. 理論之各位置Nba'+ Nbc' 2.86. 2. y = -0.0009x + 5E-15x + 2.8571 2. R =1. Nba’+ Nbc’(pixel). 2.855 2.85 2.845 2.84 2.835 2.83 -6. -4. -2. 0. 2. 4. 6. 角度(degree) 圖 4. 6 數值模擬各角度 N ba + N bc 之結果. 在感光元件平面與位移平面平行時,使感光元件偏移各角度,擷 取位移前後影像,經計算後得到的 N ba 及 N bc 值,求得各位置 N ba 及 37.
(54) N bc 的合,由圖 4.6 可看出, N ba + N bc 與各位置之角度呈現一開口向 下之拋物線,此拋物線兩邊對稱於 0 度且 R square 值等於 1,在感光 元件無偏移( = 0)時,對應之 N ba + N bc 值最大。所以若以實驗方 式,找出 N ba 及 N bc 相加值為最大所對應的角度,即為感光元件平面 與位移平面平行所需校正的角度。 . N ba 及 N bc 相減 使用各位置 N ba 及 N bc 相減之值,同 N ba 及 N bc 相加時之取點方. 式,角度從向左偏 5 度至向右偏 5 度,間格 1 度共 11 點,並在向左. 1 度至向右 1 度之間取更小的間隔,畫出各位置相對應的 N ba - N bc , 結果如下圖 4.7 之數值模擬結果:. 理論之各位置Nba'- Nbc' 0.2. y = -0.0353x + 2E-18 R2 = 1. 0.15. Nba’- Nbc’(pixel). 0.1 0.05 0 -6. -4. -2. 0. 2. 4. 6. -0.05 -0.1 -0.15 -0.2. 角度(degree) 圖 4. 7 理論感光元件偏差各位置 Nba - Nbc 的值. 在感光元件平面與位移平面平行時,使感光元件偏移各角度,擷 38.
(55) 取位移前後影像,經計算後得到的 N ba 及 N bc 值,求得各位置 N ba 及. N bc 的差,由圖 4.7 可知,其圖形為一斜線,並在感光元件無偏移時 ( = 0),其差值為零。所以若以實驗方式,找出 N ba 及 N bc 的差值 為零所對應的角度,即為感光元件平面與位移平面平行所需校正的角 度。. 4.3 中心點平均位移法實測 . N ba 及 N bc 相加 一開始做實驗驗證時,係使用較大的偏移角度來實驗,每次轉動. 1 度,左右各轉動 5 度,共 11 個位置,得到下圖 4.8:. 大偏移角度之數值實驗結果 1545.00 y = -0.5005x2 - 1.0884x + 1538.7 R2 = 0.9943 1540.00. Nba' + Nbc'(pixel). 1535.00. 1530.00. 1525.00. 1520.00. 1515.00 -6. -4. -2. 0. 2. 角度(degree) 圖 4. 8 大偏移角度之 N ba + N bc. 39. 4. 6.
(56) 而實驗出來的結果,得到需向左校正 1.087 度,而這樣的結果, 只能確定大概的位置落在向左 1 度的範圍。為了增加實驗上的可信 度,接下來的實驗如理論驗證般,左右偏移各 3 度,並在左右偏移 1 度內加上小角度偏移,角度單位分,每次偏移 20 分,藉此找出完整 之曲線,拍攝並分析位移前後影像,作圖得下圖 4.9:. 小偏移角度之數值實驗結果 823.5 y = -0.0001x2 + 0.0012x + 822.46. 823. R2 = 0.9553. Nba'+ Nbc'(pixel). 822.5 822 821.5 821 820.5 820 819.5 819 818.5 -200. -150. -100. -50. 0. 角度(分). 50. 100. 150. 200. 圖 4. 9 小偏移角度之 N ba + N bc. 如果把偏移範圍縮小,應該是可以更精確的得到校正的位置,但 是使用 N ba 及 N bc 相加的結果如圖 4.9 所示,圖形容易有跳動的現象, 使用趨勢線趨近的結果,R square 值僅為 0.9553,效果並不太好,可 信度較低。. 40.
(57) . N ba 及 N bc 相減 找出各位置 N ba 及 N bc 相減之值,偏移角度範圍亦取左右各 3. 度,正中間左右各 1 度之間再細分,畫出各位置相對應的 N ba 及 N bc 的 差值圖,並找出此值為零所對應的角度,即為相機與位移平面平行需 校正的角度如圖 4.10 所示:. 2. y = -0.0107x - 0.1805 2. R = 0.9994. 1.5. Nba - Nbc(pixel). 1 0.5 0 -200. -150. -100. -50. 0. 50. 100. 150. 200. -0.5 -1 -1.5 -2 -2.5. 相機偏移角度(分) 圖 4. 10 只取中心點分析. 由圖 4.10 可看出, N ba - N bc 為零的角度為-16.87 分,而比起用. N ba + N bc 時跳動現象改善許多,且 R square 值為 0.9994,提高了許 多。而為了使實驗結果能更為準確,原先只取影像正中心一點做分析 (圖 4.10),若在中心點正上方及正下方再各取 5 點,並考慮鏡頭扭 曲在扭曲中心附近影響不大,假設扭曲中心即為影像中心的情況下,. 41.
(58) 間距取 10 pixels 以免點跨越扭曲較大的地方,共取 11 點分析,可得 圖 4.11 ,在 N ba - N bc 為零的角度為 -17.27 分, R square 值可達到. 0.9997。. 2. y = -0.0107x - 0.1848 R2 = 0.9997. 1.5. Nba - Nbc(pixel). 1 0.5 0 -200. -150. -100. -50. 0. 50. 100. 150. 200. -0.5 -1 -1.5 -2 -2.5. 相機偏移角度(分) 圖 4. 11 中心點正上方及正下方各取 5 點,間距為 10 分. 4.4 實驗總結 將本章感光元件平面與位移平面之平行實驗結果整理如下:. (1) 就以 Nba 及 Nbc 相加及 Nba 及 Nbc 相減這兩種方式計算之結果 來看,雖在理論值計算都能夠找到正確的平行角度,但在實際 操作時 Nba 及 Nbc 相加的結果可能較容易受到震動等外在因素 影響產生誤差,如圖 4.9 所示,圖形容易有跳動的現象;而在. Nba 及 Nbc 相減時的結果,跳動的範圍大概都落在 1 個 pixel. 42.
(59) 以內,差值並不大,且線性度都較 N ba 及 N bc 相加來的高,R. square 值也提高許多。推論在 N ba 及 N bc 相加時可能因震動所 導致之誤差,在相加後會放大誤差;而在 N ba 及 N bc 相減時, 則會因相減而將誤差抵銷,因此利用 N ba 及 N bc 相減為較穩定 之方法。. (2) 在 N ba 及 N bc 相減時,將原先只取影像中心單一點分析,改成 中心上下各多取 5 點平均的方式,可得圖 4.11 之結果,跟未 改良前之圖 4.10 比較,R square 值可由 0.9994 提高至 0.9997, 結果更穩定。. 43.
(60) 第五章、平面網格法之驗證 為了確保本研究方法之正確性,本章將針對所提出的研究方法進 行驗證。首先利用 Microsoft Office Excel 假設一個無扭曲工整的理論 網格座標,給定扭曲參數使其扭曲變形後,再利用本研究所使用之校 正方法將其校正,其中對於高斯隨機分佈誤差、扭曲中心和網格旋轉 之影響做探討,比較校正後座標與理論無扭曲座標,藉由標準差來判 斷分析校正之效果。. 5.1 扭曲中心及扭曲係數的驗證 5.1.1. 理論網格製備. (1) 首先假設方正未扭曲網格,X 方向長 4480 pixels,Y 方向高 3360 pixels。 (2) 影像 X 方向從 0 開始,每間格 560 pixels 取一點,同理 Y 方向也 是,即 X 方向有 9 點,Y 方向 7 點,總共 63 個網格點,此為無扭 曲的理論網格座標 X u - Y u ,如圖 5.1 所示。. (3) 原始網格之影像中心座標為(2240,1680) ,在此假設其相機感光元 件鏡頭組會產生些微扭曲中心偏移之情況,令其扭曲中心座標為 。 (2350,1600). (4) 扭曲係數設定為 K1 7 109 ,將條件帶入前述扭曲方程式(3.49) 及 (3.50) 改寫為僅用一個扭曲係數 K1 之三次式方程式如式 (5.1) 、. (5.2)表示,即可得到扭曲的座標,即為影像網格座標 X d - Y d ,如 圖 5.1 所示。. X d X 0 X u X 0 1 K1r 2 . (5.1). Yd Y0 Yu Y0 1 K1r 2 . (5.2). 44.
(61) 3500 3000 2500. Xu-Yu. 2000. Xd-Yd 扭曲中心. 1500 1000 500 0 0. 500. 1000. 1500. 2000. 2500. 3000. 3500. 4000. 4500. 圖 5. 1 理論網格座標 X u - Y u 、扭曲網格座標 X d - Y d 以及扭曲中心. 5.1.2. 理論網格校正步驟. (1) 首先將 5.1.1 所製備之扭曲網格座標 X d - Y d ,視為實際拍照後定位 之節點座標,在此定義為影像網格座標 X d - Y d ,即為有扭曲 (Distortion)的影像座標,其單位為 pixels。. (2) 實際拍照時之試體網格節點座標依其真實尺寸作設定,在此定義 為物體網格座標 X g - Y g ,即為物體網格(Grid)的真實座標,其 單位為 mm。. (3) 由於試體網格平面可能在架設時有些許的旋轉無法手動修正,在 此利用影像網格座標 X d - Y d 計算旋轉角度,方法是將節點連結成 水平線,取通過網格中心或是最接近網格中心之水平線來計算其 旋轉角度。. (4) 求得旋轉角度後,以影像網格座標 X d - Y d 之影像中心對應至物體. 45.
(62) 網格座標 X g - Y g 之座標為原點,將物體網格座標 X g - Y g 作旋轉, 在此定義為新的物體網格座標 X g - Y g ,即為物體網格旋轉後的座 標,其單位為 mm。. (5) 旋轉後,利用影像網格座標 X d - Y d 與新物體網格座標 X g - Y g , 各自的網格中心點(最接近影像中心點)至左右兩節點距離比值 的平均,作為 X 方向的縮小或是放大係數;同理利用各自的網格 中心點(最接近影像中心點)至上下兩節點距離比值的平均,作 為 Y 方向的縮放係數,單位皆為 pixels/mm。. (6) 得知 X 方向及 Y 方向單位轉換之縮放係數,即可將旋轉的物體網 格座標 X g - Y g ,換算至與影像網格座標 X d - Y d 在同一座標系 統,此新座標系統在此定義為假設網格座標 X u - Y u ,即為無扭曲 (Un-distortion)的影像座標,其單位為 pixel。. (7) 求得假設網格座標 X u - Y u 後,以及原本的影像網格座標 X d - Y d , 有影像扭曲前後的座標,即可計算出 F 矩陣即可求得扭曲中心 (Center Of Distortion,COD)。. (8) 由於上述旋轉角度僅初步計算,因此在求得扭曲中心後,搭配原 本的影像網格座標 X d - Y d ,利用趨勢線計算新的角度,再依序前 述步驟可得到新的扭曲中心,依此重複迭代至扭曲中心收斂為 止,趨勢線計算新旋轉角度會在 5.4 詳加說明。. (9) 將扭曲中心以及影像扭曲前後的座標帶回扭曲方程式,利用最小 平方差法即可求得扭曲係數 K 。. (10) 利用求得之扭曲中心以及扭曲係數,將影像網格座標 X d - Y d 校正 回沒有扭曲的影像座標,在此定義為校正網格座標 X u1 - Y u1 ,為第 46.
(63) 1 次校正之座標,其單位為 pixel。 (11) 算出校正網格座標 X u1 - Y u1 後,再帶回去重新計算縮放係數,接 著算出新的扭曲係數,最後求得新的校正網格座標 X u 2 - Y u 2 ,為第. 2 次校正之座標。依此迭代 n 次至扭曲係數收斂,以及校正網格座 標 X un - Y un 和假設網格座標 X u - Y u 之各節點距離作標準差計算, 用此標準差大小來判斷校正之效果。. 5.1.3. 扭曲中心及扭曲係數之校正效果. 由於在此為理論解校正,校正效果可由理論網格座標 X u - Y u 作標準差 來判斷是否準確。而實際拍攝時則是用假設網格座標 X u - Y u 作標準 差 , 因 此 假 設 網 格 座 標 X u - Y u 必 須 使 其 近 似 於 真 實 網 格 座 標. X u - Y u 。本實驗所計算之假設網格座標 X u - Y u 與真實網格座標 X u - Y u 座標距離之標準差僅有1.15 10-6 pixels,幾乎完全一樣,因此 實際拍攝時即可使用假設網格座標 X u - Y u 來計算標準差,兩網格座 標如圖 5.2 所示。 在 5.1.2 求得之第 1 次校正網格座標 X u1 - Y u1 如圖 5.3 所示,明顯 與理論網格座標 X u - Y u 仍有些許差異,除了由求得之扭曲中心座標以 及扭曲係數之數值可直接比較與理論設定值之差距,由程式計算之標 準差亦可知其差異性。結果顯示在第一次計算扭曲中心時,即可幾乎 求得正確的扭曲中心,表示在理論網格沒有誤差的情況之下,扭曲中 心的計算可達到非常準確的效果。但由於扭曲係數的部份,因為縮放 係數尚未迭代計算至求出正確值而影響扭曲係數的計算,與理論值有 些許差距,亦造成結果標準差無法降低的情況。 47.
(64) 3500 3000 2500. Xu-Yu. 2000. Xu'-Yu' 扭曲中心. 1500 1000 500 0 0. 500. 1000. 1500. 2000. 2500. 3000. 3500. 4000. 4500. 圖 5. 2 理論網格座標 X u - Y u 以及假設網格座標 X u - Y u . 3500 3000 2500 Xu-Yu 2000. Xd-Yd Xu1-Yu1. 1500. 扭曲中心. 1000 500 0 0. 500. 1000. 1500. 2000. 2500. 3000. 3500. 4000. 4500. 圖 5. 3 理論網格座標 X u - Y u ,影像網格座標 X d - Y d 及第 1 次校正網 格座標 X u1 - Y u1. 48.
(65) 為了降低標準差,求得更準確之扭曲中心及扭曲係數,加入扭曲 中心和旋轉角度計算部份的迭代,以及縮放係數之迭代後,再依照其 迭代次數 n 增加,可使校正後之最終座標網格 X un - Y un 逐漸等於設定 的理論網格座標 X u - Y u ,如圖 5.4 所示。其扭曲中心以及扭曲係數亦 會隨著其迭代次數 n 增加而趨近於設定值,標準差亦可降低趨近於 零,其數值如表 5.1 所示。. 3500 3000 2500 Xu-Yu Xd-Yd. 2000. Xu1-Yu1 Xun-Yun. 1500. 扭曲中心 1000 500 0 0. 500. 1000. 1500. 2000. 2500. 3000. 3500. 4000. 4500. 圖 5. 4 理論網格座標 X u - Y u ,影像網格座標 X d - Y d ,校正網格座標. X u1 - Y u1 以及最終校正網格座標 X un - Y un. 49.
(66) 表 5. 1 設定值 X u - Y u 與逐步校正網格座標 X un - Y un 差異 扭曲中心. K1. 標準差. 設定值 X u - Y u. (2350,1600). -7E-9. 第 1 次校正 X u1 - Y u1. (2350.000,1600.000). -6.2817E-9. 4.5744. 第 2 次校正 X u 2 - Y u 2. (2350.000,1600.000). -6.9263E-9. 2.1346. . . . . 第 n 次校正 X un - Y un. (2350.000,1600.000). -7.0000E-9. 9.4E-6. 就表 5.1 的資料,可以發現扭曲中心的計算在第 1 次校正時,有 效位數取到小數點後 4 位時,其實就已經幾乎求得正確值了,第二次 之後也都是近乎等於設定值了。 而扭曲係數與標準差的部份,雖然前幾次之數值跟設定值仍有些 許差距,但是在經過多次的迭代計算後,扭曲係數可求得幾乎與設定 值相等,標準差部分也可降至 9.4 10-6 pixels 幾乎等於零,其數值與 迭代次數之關係圖如圖 5.5、圖 5.6 表示。 -6.20E-09 -6.30E-09 0. 2. 4. 6. 8. 10. 扭曲係數. -6.40E-09 -6.50E-09 -6.60E-09 -6.70E-09 -6.80E-09 -6.90E-09 -7.00E-09 -7.10E-09. 迭代校正次數 圖 5. 5 扭曲係數 K 與迭代次數關係圖. 50. 12.
數據


+7





相關文件
Define instead the imaginary.. potential, magnetic field, lattice…) Dirac-BdG Hamiltonian:. with small, and matrix
incapable to extract any quantities from QCD, nor to tackle the most interesting physics, namely, the spontaneously chiral symmetry breaking and the color confinement..
• Formation of massive primordial stars as origin of objects in the early universe. • Supernova explosions might be visible to the most
Department of Physics and Taiwan SPIN Research Center, National Changhua University of Education, Changhua, Taiwan. The mixed state is a special phenomenon that the magnetic field
(Another example of close harmony is the four-bar unaccompanied vocal introduction to “Paperback Writer”, a somewhat later Beatles song.) Overall, Lennon’s and McCartney’s
Microphone and 600 ohm line conduits shall be mechanically and electrically connected to receptacle boxes and electrically grounded to the audio system ground point.. Lines in
/** Class invariant: A Person always has a date of birth, and if the Person has a date of death, then the date of death is equal to or later than the date of birth. To be
Through the help of this study, the inconvenient of insufficient information of biological pilot plant can be improved, the manufacture security can be promoted, and the
