國 立 交 通 大 學
電控工程研究所
碩士論文
對於祈使機械控制命令的理性預期模型設計
Designing a Rational Expectation Model for Imperative Machine
Control Commands
研 究 生:黃晉澤
Student: Jin-Ze Huang
指導教授:黃育綸 博士
Advisor: Dr. Yu-Lun Huang
中華民國一百年七月
對於祈使機械控制命令的理性預期模型設計
Designing a Rational Expectation Model for Imperative Machine Control
Commands
研 究 生:黃晉澤 Student: Jin-Ze Huang
指導教授:黃育綸 博士 Advisor: Dr. Yu-Lun Huang
國 立 交 通 大 學 電控工程研究所
碩士論文
A Thesis
Submitted to Institute of Electrical Control Engineering College of Electrical Engineering
National Chiao Tung University in partial Fulfill of the Requirements
for the Degree of Master
in
Institute of Electrical Control Engineering
July, 2011
Hsinchu, Taiwan, Republic of China
Designing a Rational Expectation Model for Imperative
Machine Control Commands
Student: Jin-Ze Huang
Advisor: Dr. Yu-Lun Huang
Institute of Electrical Control Engineering
National Chiao Tung University
Abstract
自然語言處理的相關研究可以追朔到1950年代,為了讓一般使用者能夠用自然語言與 電腦系統溝通,許多研究學者投注於基於自然語言之對話系統的研究。 現有的研究依 其設計,主要可以分為三種基本的對話方法 - 基於有限狀態(Finite State Machine)、 基於框架(Frame),以及基於資訊狀態更新(Information State Update)等對話方 法。 在這篇論文中,我們定義了祈使控制機械命令,用來組成一個任務,一個任務包 含了受控元件、行為、受控元件的描述。 我們提出一個理性期望模型,結合有限狀態 機與分散式代理人等設計概念,分析我們所定義的任務。 其中,有限狀態機是用來處 理任務中的受控元件、行為、描述子等關係,簡化後續對話方法中各分散式代理人 (包括元件代理人、行為代理人、回應代理人、命令代理人等)所負責的處理程序。 最後,我們並以各種不同任務分析,結果可以明顯看出本文所提之方法可以幫助對話 管理者減少對話的次數。
Designing a Rational Expectation Model for Imperative
Machine Control Commands
Student: Jin-Ze Huang
Advisor: Dr. Yu-Lun Huang
Institute of Electrical Control Engineering
National Chiao Tung University
Abstract
Since 1950s, natural language processing and dialog approaches, concerning the interactions between human users and computers, have been researched and evolved towards a more friendly user interface. By their designs, the existing dialog approaches can be classified as Finite State-based, Frame-based and Information State Update (ISU)-based. In this thesis, we define imperative machine control commands to construct a task with operated device , behavior and description of the device. we propose a rational expectation model, integrated with a finite state machine and distributed agents, to analyze the task we defined. A finite state machine is designed to construct relationships of a operated device , behavior and description describing the device. Such a design simplifies the process of distributed agents, including the component agent, behavior agent, response agent and command agent, in a dialogue system. In the end of the thesis, we analyze REM in terms of different case studies of tasks. From the case studies, we show that the REM can decrease the conversation of dialogue manager.
Contents
Abstract i
Abstract ii
Table of Contents iii
List of Figures vi
Chapter 1 Introduction 1
1.1 Dialogue System . . . 1
1.2 Approaches of Dialogue Manager . . . 3
1.3 Motivation . . . 4
1.4 Contribution . . . 5
1.5 Organization . . . 5
Chapter 2 Background 6 2.1 Approach of Dialogue . . . 6
2.1.1 Finite State-Based Approach . . . 6
2.1.2 Frame-Based Approach . . . 9
2.1.3 Information State Update Approach . . . 12
2.2 Current Dialogue System . . . 14
2.2.1 FSM-based Dialogue Systems . . . 14
2.2.2 Frame-based Dialogue Systems . . . 15
2.2.3 Information State Update Dialogue System . . . 17
2.3 Summary . . . 17
3.1 Preliminaries . . . 19
3.2 Definition of Task . . . 21
3.3 Block Diagram . . . 21
3.4 Flow Chart . . . 25
3.5 Infer missing information . . . 30
3.6 Summary . . . 30
Chapter 4 Implementation 35 4.1 Environment . . . 35
4.1.1 Hardware . . . 35
4.1.2 Software . . . 35
4.2 Open Agent Architecture . . . 36
4.2.1 Agent-Based Model . . . 36
4.2.2 Structure of OAA . . . 37
4.3 Structure of Proposed Mode with OAA . . . 38
4.4 summary . . . 39 Chapter 5 Analysis 41 5.1 Case Study . . . 41 5.1.1 Case 1 . . . 42 5.1.2 Case 2 . . . 43 5.1.3 Case 3 . . . 44 5.1.4 Case 4 . . . 45 5.2 Discussion . . . 45
5.2.1 Finite-sate approach with REM . . . 45
5.2.2 Frame-based approach with REM . . . 46
Chapter 7 Future Work 48
List of Figures
1.1 Dialogue System . . . 2
1.2 Architecture of Dialogue System . . . 2
2.1 Finite State-Based approach for component in home control . . . 7
2.2 Frame-Based Model . . . 10
2.3 Exmaple of Finite-based Dialogue System . . . 16
3.1 Parse Tree . . . 20 3.2 Block Diagram . . . 22 3.3 Major Flow . . . 25 3.4 Overview . . . 27 3.5 Task Generator . . . 31 3.6 Component Manager . . . 32 3.7 Behavior Manager . . . 33 3.8 Response Manager . . . 34 4.1 Agent-Based Model . . . 37
4.2 Open Agent Architecture . . . 38
4.3 Structure of Proposed Model with OAA . . . 39
4.4 Facilitator with One Manager . . . 40
Chapter 1
Introduction
This chapter introduces the definition and approaches of a dialogue system, and then describes our motivation and contribution.
1.1
Dialogue System
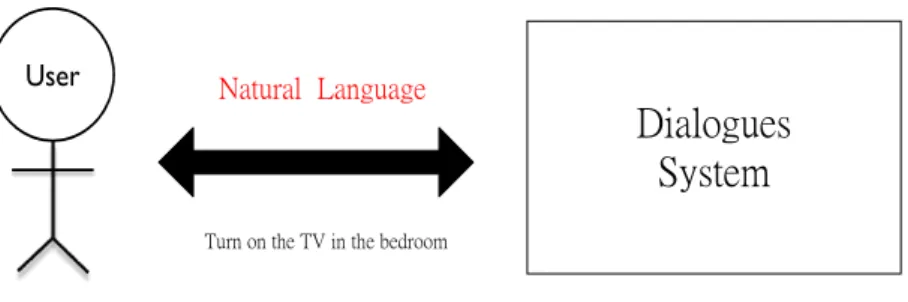
The major goal of a dialogue system is that a user can use interact with the dialogue system by natural language, as shown in Figure. 1.1. The research can be traced back to Artificial Intelligence(AI) in 1950s, a number of research has addressed this goal until now. In general, the dialogue system can help user complete some tasks in specified domain.
For example, a user may control home appliance by simple words or sentences. Or, a driver who is in car wants to play music, go home by navigation system and call someone within driving. A user can use natural language as command, the dialogue system should realize the semantic from user. So, the dialogue system should analysis the sentence from human to realize semantic.
There are several components in the dialogue system, as shown in Figure. 1.2 We take a flow to explain the integral system. The input is a sentence with speech and the dialogue manager commands the speech recognition component recognizes the sound sentence to text. The semantics parsing component receives the text from speech recognition and analyses the sentence to realize the semantic from a user. The semantics parsing component parses the result to dialogue manager. The result may be a controlled command or unmeaning sentence.
User
Figure 1.1: Dialogue System
The dialogue manager sends the command to the external communication component according to the result as controlled command. The external communication component is responsible for communicating with external device and controlling the devices. At last, the speech synthesis component transforms the texts to voice and outputs the voice to user.
Speech Speech
Dialogue Manager Speech
Recognition
Semantics
Parsing CommunicationExternal
Speech Synthesis Dialogue System
Figure 1.2:Architecture of Dialogue System
bedroom. User may say "Turn on the TV in the bedroom.". Then the speech recognition component recognizes the sound sentence to text. The semantics parsing component realizes the semantic, let dialogue manager know user's command. The dialogue manager will receive the information, and connect other components according to the semantic of user's command. The dialogue manager requires the external communication component to communicate the device "TV" and send the command "turn on" to device. The response generation component creates the response according to result of external device as "complete" or "another
command". The speech synthesis component transforms the response to speech and outputs to user. User will hear the sound response not just text.
For missing information, the dialogues manager would ask the user for missing parts,and the process increases the number of conversation. In a dialogue system, the dialogue manager is the system core. The approaches of dialogue manager are responsible for the flow of conversation, including for querying the missing information. The dialogue manager controls the dialogue flow and the approach of dialogue manager decides the dialogue type.
1.2
Approaches of Dialogue Manager
Dialogue system can be classified to three approaches. We will introduce these approaches in Section 2.1 : a.Finite state-based approach - A sequence of predefined questions for a task. b.Frame-based approach - A set of predefined condition for a task. c. Information State Update approach - A number of sets of conditions and effects support the information state changing.
We describe the three approaches shortly.
with a sequence of predetermined questions. A general system with state-based dialogue constraints the user's input. Because the restriction of input,the system can be
constructed easily.
• In a frame-based approach the user is asked questions that enable the system to fill slots to perform a task. The dialogue flow is not predetermined but reliable for user's input.
• Information State Update approach (ISU) [1] is similar with frame-based approach, but more complex. The major difference between ISU and frame- based is that ISU has a information state to update with rules. A programmer must determine the a set of dialogue move,a set of update rules and an update strategy.
1.3
Motivation
The dialogue manager must analysis the semantics and resolve the missing information by mentioned approaches. For reducing the load of dialogue manager, we determine imperative machine control commands to construct a task with the operated device, its descriptions and behaviors. Moreover, we design its rational expectation model (REM) for missing information between the semantics parsing component and the dialogue manager.
The imperative machine controlling commands would compose a task and assist REM to check the integrity. We apply finite-state machine and the concept of distributed agents for designing REM. REM would inspect the integrity of the task step by step, and deal with the missing information of the task by distributed agents.
We design a set of distributed agents to deal with the missing information in a task
dependently. We use Open Agent Architecture (OAA) [2] to implement the distributed agents, we would introduce the OAA in Section 4
1.4
Contribution
We expect that imperative machine controlling commands and REM would reduce the load of the dialogue manager. For determining the form of the controlling command, the dialogue manager realizes the semantics easily. REM deal with missing information before the dialogue manager. The dialogue manager does not handle the missing information by asking users or querying the database.
1.5
Organization
In Section 2.1, we introduce the three approaches and their principle advantage and disadvantage of those approaches. We discuss the implementation of the approaches in Section 2.2 and show their pros and cons. And the detail of REM is revealed in Section 3. In Section 4 and Section 5 we introduce the implementation and discuss all scenarios. Section 6 concludes the thesis.
Chapter 2
Background
In the chapter, we talk about background of our research and current dialogue system.
2.1
Approach of Dialogue
There are three basic strategies for a dialogue system -- finite state-based approach, frame-based approach [3] and information state update (ISU) approach respectively. We discuss pros and cons of finite state-based approach, frame-based approach and ISU approach.
2.1.1
Finite State-Based Approach
In a basic finite state-based system, the dialogue structure is represented in the set of a state and possible transitions. The states in the system represent information from user, and the transitions between nodes determine possible path. The system progresses through a series of states, with the transitions between nodes which are determined by the user's input. In finite state-based approach, the system consisted of a sequence of predetermined question and corresponding keywords,as show in Figure. 2.1. All paths and questions are predefined.
Most commercial systems are implemented with this approach, because the dialogue flow is specified as a sequence of states with possible transitions. The system maintains the
transitions of the dialogue by recognize the answer of question, as words or phrases of user's responses.
We take an example about home control. The example of specified flow of a dialogue system which verifies the user's response of each state. There is a assumption that accuracy rate of the speech recognizer is 100%.
Figure 2.1: Finite State-Based approach for component in home control
System:Which one do you want to operate? [Question 0]
User: The television in the bedroom. [Keyword 0]
System:Which one television? [Question 1]
User: In the bedroom [Keyword 1]
System:What is the instruction [Question 2]
User: Turn on and go to channel 36 [Keyword 2]
System:What is the next instruction [Question 4]
User: Go to channel 36 [Keyword 4]
System:What is the next instruction
In this conversation, system would ask a sequence of questions for the controlled device and behaviors. User's answers have to satisfy the transition condition or system would ask the same question until the corrected keywords occur. And system can not handle
over-information, if user provided too much information. The system with finite-state approach can not accept the over-information.[4] And a problem about the orderless of behaviors occur. If a user gives "Go to the channel 36" command before "Turn on the TV" command, the system with finite-state approach can not execute the command exactly.
Generally the system with finite state-based approach restricts user's input to a word or phrase. Each state which receives a predetermined word or simple phrase makes language understand more easier. However, this advantage will make system easy to construct step by step. The flow of dialogue is passive for user, because the restricted input. Even the input is natural input, like sentences, the system must extract the words or phrase in the sentences by the speech recognizer.
In 1996, B. Hansen described a toolkit with typical finite state machine that automatically generates prompts in a variety of styles.[5] The toolkit provides several styles for format of question, so a programmer can design a set of questions with selected styles. A programmer can construct a system by a series of predefine questions.
Advantages
Principal advantage of the finite state-based approach are its simplicity and its execution efficiency. For a developer, the predetermined transition network can approach
well-constructed task involving question-response conversation. The well-construed task involves many aspects, as ordered states, information of each state will be dependent or clear transition network. The constructed system guides the flow of dialogue and decides the next
question.
Moreover, the user's responses are restricted, so technological demands will be reduced, particularly the speech recognizer. But the lack of flexibility is a trade-off against the natural input. If the dialogue system is built-in in mobile device, the technological demand is a big issues for implementation. For those reasons, the most commercial systems are implemented by finite-state based approach. As mentioned example, the developers define a series of states and tradition network to complete a well-construed task.
Disadvantages
Finite state-based approach is not suitable for less well-structured task involving
unpredicted conversation between user and system. The less well-constructed task means all information of each state will be dependent or the transition network will change within runtime. The dependence means that current state needs information of next state.
The simple example of changing network is that the entry point of system changes or is unpredicted every time. Because the system with finite-state based approach has fixed
transition network, the entry point must be unchangeable. It's not natural for user, because user gives the predetermined keyword what dialogue system needs in order. So, The system can't handle additional information in one conversation at a time. For user, the dialogue system with finite stated-based approach is not flexible for general lifestyle.
2.1.2
Frame-Based Approach
A basic frame-based system would ask user questions that enable the system to fill slots in a template in order to perform a task. In frame-based approach, the dialogue flow is not
user-initiative because user provides information on user's own initiative.
The questions or tasks of frame-based approach are dependent on their preconditions. The precondition is the information from user, that is the answer of the question. In the Philips timetable system[6], there are predefined conditions that compose the task or question.
In fact, the frame-based approach can import mathematical model for decision making. In 2005, Chin-Han Tsai proposed a dialogue strategy [7] with SA-Q learning [8] and Markov decision [9] for navigation.
We take two examples about home control. The two example of specified conditions of a dialogue system with frame-based approach, as show in Figure. 2.2. There is a assumption that accuracy rate of the speech recognizer is 100%.
Conversation 1
System:What is your command?
User: Turn on the TV. [Task 2]
System:which one TV? [Question 2]
User: In the bedroom
System:Complete your command [Task 3]
Conversation 2
System:What is your command?
User: The TV in the bedroom. [Task 4]
System:What is your instruction? [Question 4]
User: Turn on
System:Complete your command [Task 3]
In the two conversations, the system with frame-based approach would ask a common question at first. A user could say any imperative sentence to be a command, and then the system would find the correct keywords in user's command. The system fills the slots (or satisfies the conditions) to complete some tasks.
Obviously, the system can handle over-information under some circumstances, if a user provided more information. But, if a programmer did not take into account some situation, the system does not complete the task. In summary, the precondition determine the flexibility of the dialogue system and how system executes actions.
Advantages
The frame-based approach has several advantages over the finite-state-based approach. For users, frame-based approach is greater flexibility and the ability of using natural language as input. It is difficult to constrain user's responses required by the system, even when the system have been carefully designed.[10] The user can provide over-information under the frame-based approach. In this way, the transition time can be reduced, that results in a more efficient and more natural dialogue flow.
Disadvantages
Finite state-based approach and frame-based approach are appropriate for well-defined tasks. In frame-based approach, all task should be decomposed to several meaningful slots (or conditions). And only well-defined tasks can be decompose.
In this context, the determination of the system’s next action is fairly limited, The developers defined the time of occurrence of tasks (or questions) according to the sets of chosen conditions. So, the frame-based approach is short of scalability.
2.1.3
Information State Update Approach
The ISU approach consists of five concepts.
• Informational components, including aspects of common context and internal motivating factors.
• Formal representations of informational components.
• A set of dialogue moves, that trigger the update of information state.
• An update strategy,that deciding which rule(s) to apply.
In a sense, the ISU approach is similar with the frame-based approach. There also are conditions and rules in the ISU approach. But, there is a difference between the ISU approach and the frame-based frame There is information state in the ISU approach, the dialogue state can be represented by information state.
Moreover, a programmer must define the informational components in formal represantation. The informational components can be private information or public
information. Further, the dialogue moves serve as triggers to update the information state. The set of dialogue moves would influence the possible messages the can be sent and the update to be made.
At last, the programmer should design a set of update rules and choose a update strategy. The update rules formalize the way that information state is changed. There some types of the update strategy, take the first rule, or apply each rule in sequence etc.
Advantages
The ISU approach has several advantages over the frame-based approach. The ISU approach provides the information state to present the dialogue state. The rules can be more complex than the frame-based approach.
The ISU approach is more flexible than frame-based approach, because the dialogue moves can make system be mixed-initiative. The dialogue moves can determine the next information state according to the previous information state and user's input.
It is also difficult to constrain user's responses required by the system, even when the system have been carefully designed. The ISU approach can update a set of informational components in a conversation.
Disadvantages
The disadvantages of ISU approach are how to define the informational components to represent the information state, and how to design the conditions and effects for rules. In a word, the ISU approach is more complex than frame-based model Because the levels of ISU approach is more complicated.
2.2
Current Dialogue System
In the section we would take a look at the few implementations of dialogue system by a or finite-state based and frame-based strategy.
A number of researchers have focused on single strategy for implementation. Some simple application is still constructed by finite-state based strategy, as telephone booking system. The demand of telephone booking system is easily structure, so the system was constructed by finite-state based strategy.
On the other hand, the frame-based strategy will be applied to database query system mostly, as voice navigation system. The voice navigation system will analysis user's
instruction, as "Take me to NBA store on 5th avenue.". The system fill in slots of the specified task. The user's instruction will be taken apart to several pattens, as verb or destination. The system would complete the user's request based on the result of decomposing the user's input.
2.2.1
FSM-based Dialogue Systems
Since 1992, the Center for Spoken Language Understanding (CSLU) developed the CSLU Toolkit [11] as a complete system , including speech recognition and authoring tools etc. By CSLU Toolkit, we can use Rapid Application Developer (RAD) to build real-world dialogue
system. A programmer can define activities by placing objects and assign transition of activities. In 1999, Michael F. McTear provided practical experience for undergraduate students in the specification and development of spoken dialogue systems.[12]
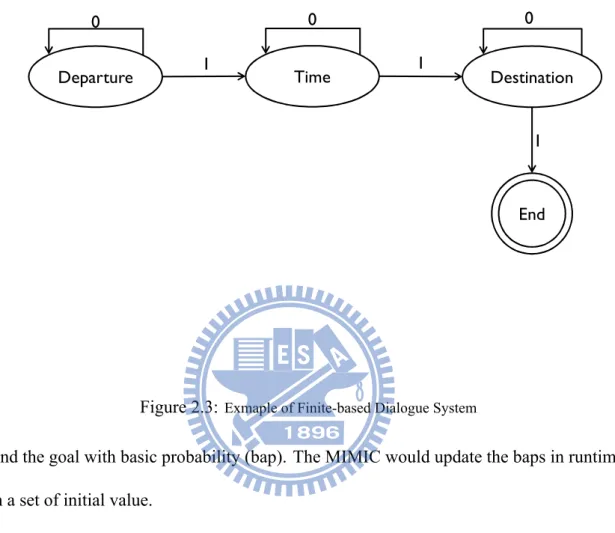
We take a simple ticketing system as explanation according theory of finite state machine. [13] We define a set of questions as a finite set of state S =
Departure,T ime,Destination,End . And we define the transition, as shown in Figure 2.3. At first, the reservation system asks the user for destination. If the ticketing system does not get the exact answer from user, the system holds the state Departure till the correct answer. If the ticketing system receives the correct answers of three states Departure , T ime and Destination , the system would enter the state End.
Obviously, the ticketing system with predefined questions is lack of flexibility. And user must complete condition of all states, it is unfriendly for user. Even programmers design a integrated finite-state machine,a unpredictable user input or unpredictable behaviour of devise will make the system in loss of function.
2.2.2
Frame-based Dialogue Systems
In 1995, "The Philips Automatic Train Timetable Information System" [6] provides information about train connection between German cities. And in 2000, "MIMIC: an adaptive mixed initiative spoken dialogue system for information queries" [14] provides movie
showtime information. The two system had the same aim, that is how to construct an
appropriate database query that user required. In fact, the Philips system still is user-initiative, the MIMIC is mixed-initiative by modelling initiative during dialogue interaction [15]
The task specification in MIMIC consists of four slot, Question-Type, Movie, Theater and Town respectively. The MIMIC use goal selection algorithm to determine the action of system
Departure Time Destination 0 1 End 1 1 0 0
Figure 2.3: Exmaple of Finite-based Dialogue System
to find the goal with basic probability (bap). The MIMIC would update the baps in runtime with a set of initial value.
Obviously, the frame-based strategy would be suitable for well-defined task. If a task has unknown number of slot, e.g controlling a device, the frame-based strategy will be complex. We would say a series of instructions to a device. For handle the situation of unknown number of slots, developer must design more combinations of slots for tasks. So, the frame-based strategy is similar with finite state-based strategy in a aspect of weak ability of unknown situation.
2.2.3
Information State Update Dialogue System
In 2007,Amores et al.[16] [17] proposed a multimodal and multilingual dialogue system for the home domain(MIMUS). MIMUS follows the Information State Update approach to dialogue management, and has been developed under the EU-funded TALK project[18] MIMUS
Architecture of MIMUS is a set of OAA(Open Agent Architecture) agents[2]. The system core is Dialogue Manager ,which processes all requests from other agents, the user's input and provides appropriate output. Information transformation between all agents is controlled by system core.
Because of Open Agent Architecture,every manager will complete subsection of user's request. And communication of every manager still pass through the dialogue manager, every manager will send the result of subtask to the dialogue manager. The main approach
implementing the system is Information State Update (ISU). The principal element of ISU approach is the dialogue history, which memorizes dialogue states and is updated by some update rules.
The informational components in MIMUs are Dialogue Move, Type, Arguments and Contents (DTAC)[19]. The DTAC obtained for a keyword or a phrase trigger the dialogue update rule.
2.3
Summary
In summary, all approaches have their own advantages and disadvantages, and there are implementation with those approaches. Some are more easy to construct, some are more friendly for users. But, the implemented systems must query the missing information from
Chapter 3
Design
3.1
Preliminaries
In the section we will define the notation of controlling commands. First We were inspired by Phrase Structure Grammar (PSG),that is a grammatical notion presented by Chomsky in Syntactic Structures (1957) to represent the structure in language phrases.[20] Based on PSG, we could decompose the sentence to noun-phrase as NP and verb-phrase as VP. In general, the VP will contain NP and verbs and the NP will contain nouns.
Further, we define some notation . (Table 3.1) We define the device that receive user's command is dominated device (Cx). And general noun (N ) often means the operated-state of
dominated device. User's commands map to the behavior (bxi) of the dominated device. The
subscript x is corresponding to the operated device (Cx). The subscript i is a index means
order of behaviors. The subscript x is corresponding to the operated component (Cx). We
define the description as Dx that includes adj and Loc.
Table 3.1: Notation of Cluster
Object Notation Dominated Device Cx General Noun N Behavior (Command) bxi Location Loc adjective adj Description Dx
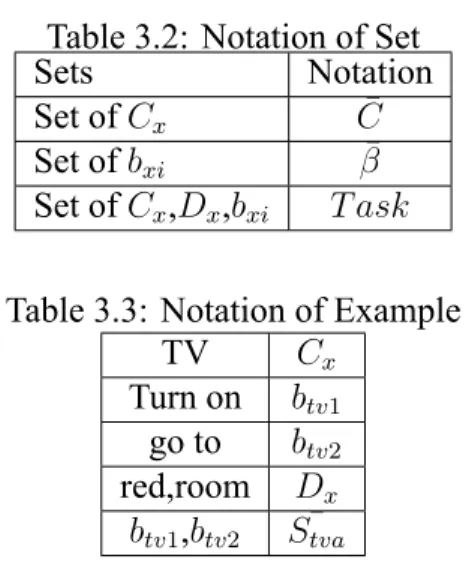
Table 3.2: Notation of Set
Sets Notation
Set of Cx C¯
Set of bxi β¯
Set of Cx,Dx,bxi T ask
Table 3.3: Notation of Example
TV Cx
Turn on btv1
go to btv2
red,room Dx
btv1,btv2 S¯tva
And we define the set of notation. (Table 3.2) As mentioned PSG, the structure of the sentence is often drawn out as a parse tree, shown in Figure 3.1. Due to the parse tree, we can obtain the structure of sentence easily. Give a example "Turn on the red TV in the room and
Turn on the red TV in the room
Turn on the red TV in the room
the red TV in the room
TV
the Red) in the room
Figure 3.1: Parse Tree
go to channel 36". As mentioned, we can disassemble the sentence to several parts by PSG. First, the sentence will be taken apart to two V Psaccording to the verbs "Turn on" and "go
3.2
Definition of Task
We define a task including three slots, as Cx, bxi and Dx. A task would represent an
imperative machine control command, including the elements we define before. The user's sentence would be transformed through semantics parsing, and the task generator, we introduce in next section, would generate the task with the result.
A task should include Cxor bxi at least, for example , a Cx could compose a task. The
composition of a task is limited for three elements, but the number of bxi and Dxis not limited.
A task would include more than one behavior (bx), for an example, task = {
tv,turn on,go to the channel 36,bedroom}. The mentioned task means the operated device tv would receive more than one command, as turn on and go to channel 36.
But, the situation about missing information would happen unexpectedly, for an example, task = {tv,bedroom}. The mentioned task is lack of behaviors, the sub-model in Section 3.3 could analysis the task, and deal with the missing information in the task.
3.3
Block Diagram
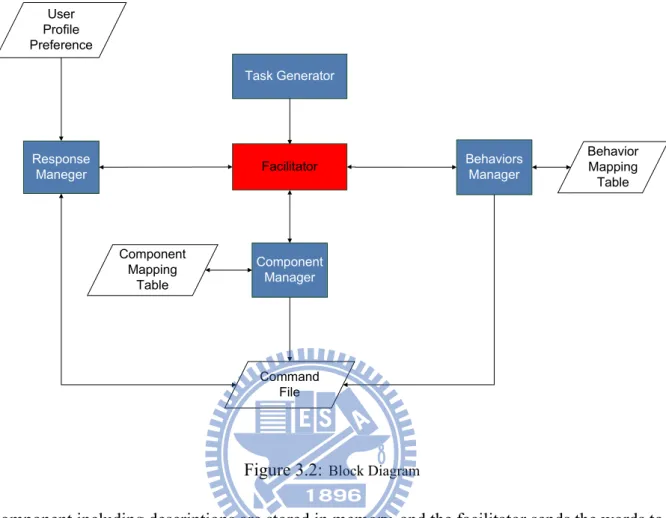
Abbreviation In the section we discuss out block diagram in REM, and the architecture of the model we proposed is according to OAA [2]. All sub-models in the model are agents that be responsible for different function based on the theory of distributed agents. So, every agent is responsible for of the task. Here is the block diagram, as shown in Figure. 3.2.
We would introduce function of the sub-models in REM, and flow chart of the sub-models.
Component Sub-model The facilitator receives the tagged word and dispatching a part of the task to the suitable agent according to the label. The tagged words as information of the
Task Generator
Facilitator Behaviors Manager
Component Manager Response Maneger Component Mapping Table Behavior Mapping Table User Profile Preference Command File
Figure 3.2:Block Diagram
component including descriptions are stored in memory, and the facilitator sends the words to the component sub-model. The component sub-model fills actual command in instruction file. There is a component mapping table to support component sub-model mapped the user's command to actual instruction. The component sub-model can handle the unknown device according to some rules. For example, if we want to add a new TV in system, the NLTK can identify the word "TV" and the word "TV" has a device type code, then the component sub-model can update the component mapping table. The component sub-model will analysis the description of the device ,including the location and some additional feature of device. The description help the component sub-model find the exact device. For example, there are more than one TV in the house but in different room, as bedroom or living room. The component sub-model would find the exact device according to description in user's command. And all
descriptions of device still have mapping code of actual instruction in the component mapping table.
Behavior Sub-model The tagged words as instructions of the device will be stored in memory, and the facilitator sends the words to behavior sub-model. The behavior sub-model fills actual command in instruction file. There still is a behavior mapping table to support the behavior sub-model mapped the user's commands to actual instructions. The behavior
sub-model can identify the whether user's command is suitable for device or not. For example, we can't let TV dry clothes, because the command "Dry" should belong to washer. And the behavior sub-model fills a set of instructions in command file in order according to the sequence of user's command. The behavior sub-model also can build some relationship between new behavior and device.
Missing Information Sub-model The missing information sub-model handles the lack of the user's command. There are several possible scenarios. First, all information of user
command is integral, the missing information sub-model will not do anything. Second, there is lack of information, the missing information sub-model adds some instruction based on user preference. Because the user preference includes location and costumed set of user.
The missing information sub-model can find the exact device with the location of user if user did not give the completed information of device. For example, user is in the bedroom and user want to turn on the TV in the room. But the user may just say "Turn on the TV". The missing information sub-model will find the TV in the bedroom according to the location of user.
Component Mapping Table The component mapping table helps component sub-model fill the actual instruction in command file. We design the component mapping table with three columns. device ID location ID feature ID
The first is device type with two fences, the second is location with two fences and the last is feature with four fences. The feature column can be costumed by user or programmer.
For example, the feature column can be the brand of device,color of device or more details of device, even be combination of brand and color. The component sub-model should maintain the mapping table. As mentioned above, the component sub-model updates the mapping table by some logical rules.
Behaviour Mapping Table The behavior mapping table will help behavior sub-model fill the actual instruction in instruction file. The behavior mapping table has three columns. device ID state ID parameter weight
The first is device type with two fences, the second is state of device with two fences and the last is parameter with four fences. The parameter column is the follow-up parameters of the user command. The last column is weight of the device, based on the users trends.
For example, the user may watch the channel 73. The TV will receive the instruction of changing channel and the number 73 is the follow-up parameter of the command. The weight of TV would increase when the task include the Cx TV.
The behavior sub-model should maintain the mapping table. As mentioned above, the behavior sub-model updates the mapping table by some logical rules.
In fact, the three sub-models can handle most scenery in missing information of tasks. And we add some user information in system to enhance the usability of the proposed sub-models.
3.4
Flow Chart
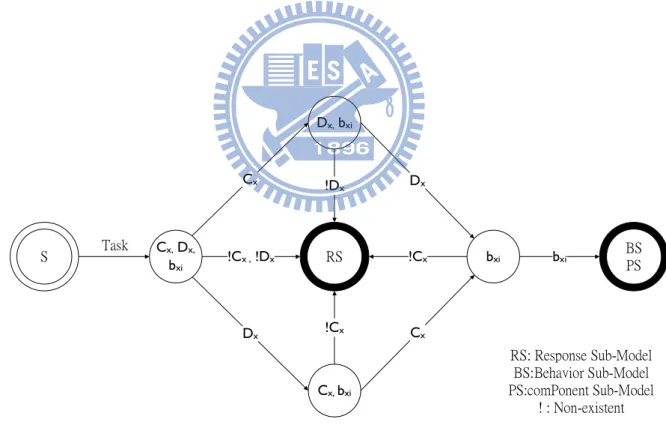
Flow Chart We apply finite state machine to major flow with the task generator determines determining weather the Cx, Dxand bxi in the sentence or not, and with the missing
information sub-model, behavior sub-model and component sub-model, as show in Figure. 3.3 The notation [!] means the element is non-existent in sentence.
At first, we check Cx and Dx whether in sentence, and then check the bxi. If there is not
any Cx , Dx or bxiin sentence, the Behavior sub-model and the comPonent sub-model
handle the lack of information. If user provides complete information in sentence, the Missing Information Sub-model handle the new elements.
Cx,Dx, bxi Dx,bxi Cx, bxi Cx Dx !Dx !Cx bxi Dx Cx !Cx !Cx ,!Dx bxi
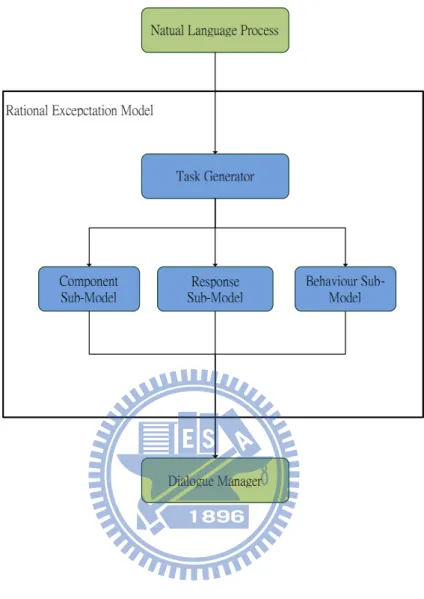
Overview As mentioned component, there is a overview of the dialogue flow that composed by those components, as Figure. 3.4. At beginning, the Natural Language ToolKit decomposes the sentence to several parts and give the words simple tags. And the task generator stores the useful words by the mentioned tags by some string manipulation. The component sub-model, the behavior sub-model and the missing information sub-model process respective task
synchronously. The component sub-model and the behavior sub-model find the corresponding command form the mapping tables. Updating the mapping table is for the behavior sub-model and the task generator. The missing information sub-model add missing information in
command file according to user profile preference.
Task Generator A flow of task generator is Figure. 3.5 Then there is the task generator inspects whether a new device Cxin user command. The purpose of task generator is to
generate a task. At first, task generator checks he device Cxwhether in dataset. If there is a
new device, the task generator will register the device in dataset. There is a logical rule to add new device. For example, if the last device type id is 1000 and the new device type will be 1001.
Another function of task generator is checking if the behavior bxi and Dxis in user
command. But the task generator does not update the behavior mapping table.
Component Sub-model There is a flow of the component sub-model as show in Figure. 3.6. The component sub-model checks whether the device Cxand the description of the device Dx
is in user command. If there is no device Cx, component sub-model will ignore the device type
column in command file. And then, the component sub-model examines the description Dx
weather is in the dataset. If there are new descriptions, the component sub-model registers the new description in dataset. There still is a logical rule to add new description of device. If
Figure 3.4: Overview
there is no description of device Dx, the component sub-model still ignores the device
Pseudo Code
Step 1 : input Cx and Dx
Step 2 : if Cx exists in component mapping table
Cx → command file
else break
Step 3 : if Dx exist in component mapping table then
if device column = Cx
Dx → command file
else Cx → device column
else
Dx → component mapping table
Behavior Sub-model There is a flow of the behavior sub-model as show in Figure. 3.7. At first, the behavior sub-model still checks the behavior of device bxiwhether is in dataset. If
there is a new behaviur, the behavior sub-model registers the new behavior of device in dataset. And the behavior sub-model sets the device type column in the behavior bxi and fills
the behavior bxiin command file.
On the other hand, if there is an old behavior, the behavior sub-model must check the flag
FN ewC. If the flag is 1, the behavior sub-model would tag the behavior bxi to the corresponding
device Cx. Behaviour sub-model judges whether the behavior from user command is logical
for device Cx. If the behavior bxiis logical, behavior sub-model fills bxi in command file
according to behavior mapping table. The behaviour sub-model ignores the bxi in user
Pseudo Code
Step 1 : input bx and Cx
Step 2 : if bx exists in behavior mapping table
if device column = NULL Cx → device column if device column = Cx bx → command file else break else
bx → behavior mapping table
Cx → behavior mapping table
Missing Information Sub-model There is a flow of the missing information sub-model as show in Figure. 3.8. At first, the missing information sub-model checks the user command. If there is not device Cxin user command, the missing information sub-model fills device type
ID in command file according to type ID column behavior bxi from behavior mapping table.
Then missing information sub-model examines the location in user command. If there is no location information in user command, the missing information sub-model gets location information from user profile preference. And the missing information sub-model also examines the feature information in user command, as adjective, brand information or other information describes the device Cx. But the feature information is not necessary.
Pseudo Code Step 1 : input bx
Step 2 : Cx = device column of bx
Step 3 : Cx → command file
Step 4 : Dx = description of Cx
3.5
Infer missing information
The mapping table would be solution for how to infer the missing information. By the relationship between Cx and bx, the behavior sub-model would infer the corresponding
behaviors for the device. And so does the missing information sub-model.
The sub-models with inferring function still deduce the wrong solution, because the faulty mapping table. But by the weight column, the sub-models would refine the mapping table. The probability of inferring the wrong solution would decrease, by refining the weight over and over.
3.6
Summary
We introduce the definition and form of tasks included notations to express users'
commands. We still defined the two mapping tables, and make a description of the sub-models in function and flowchart.
For different elements in a task, we design the corresponding sub-models to deal with different sceneries. The sub-models would check the elements in a task and missing information, and do the actions for different sceneries.
x C C Cx { }x C C C x b
x C x C x C
xi
b
{ } x x bxi xib
x C xi b b x xib
xib
xib
b
xib
xi xib
x CStart
Check
User
Command
Type in
command?
Feature bit
in field?
YES
Locattion bit
in field?
NO
Fill type ID in
Command file
YES
Get location
information in
User profile
NO
Guess Device
according to
behavior
Fill location bit
in Command
file
Fill feature bit
in Command
file
YESNO
End
Chapter 4
Implementation
In the chapter we will discuss our implementations of REM based on our proposed model.
4.1
Environment
We divide into two parts to explain how we implement. One is hardware, the other is software included the tools we applied to.
4.1.1
Hardware
In hardware, the CPU is Intel C2D E7500, it's a dual-core CPU. The RAM is 2048 MB. And we use keyboard as input, and the output is monitor. In fact, a single-core CPU still satisfies the demand of our model.
There is a list about the hardware. (Table 4.1)
4.1.2
Software
For general environment,all tools we applied work normally on Windows XP. We have to simulate Windows XP with virtual machine. So we use VMware 3.0.1 to construct Windows
Table 4.1: Hardware List CPU Intel C2D E7500
RAM 2048MB
Input Keyboard
Table 4.2: Software Version VMware 3.0.1 Eclipse helios-SR2 OAA 2.7 GCC N/A
XP. And the host operated system is Windows 7
The program editor is eclipse and its version is Helios Service Release 2. But there is no C/C++ compiler in eclipse. Before writing the program, we must install the compiler gcc.
At first, the program language of Natural Language ToolKit (NLTK) with distributions for Windows, Mac OSX and Linux is Python . So, we have to write a simple program to apply NLTK. The version of Python is 2.6 . To use the NLTK library,we need to import the head file. And the version of OAA library is 2.3.2 since June, 2007 .
The main program language we applied to complete all components is C++.
4.2
Open Agent Architecture
We would introduce the OAA in this section. We have to introduce the concept of agents at first. And then we would dig in OAA.
4.2.1
Agent-Based Model
Agent-based model is based on Artificial Intelligence (AI) and focus on dialogue system as cooperation between intelligent agents. All of these approaches for agents do focus on "Goal" , "Solution" and "Event". "Event" means the user's request, "Goal" is the expected action for user's request and "Solution" is the actual action for user's request.
"Solution" and send "Goal" to another agent or user. There are not only one "Solution" for a "Event" , and the "Solution" will change according to some parameters.
In agent-based model shows as Figure. 4.1, a small black point represents a agent with some function. The gray ellipse is the external environment, and the other ellipses in the big gray ellipse are perceived by agents. A agent is responsible for perceiving a small part of environment, that means function of agents is not strong. If there are two agents, one of them is in charge of handling what kind of home appliance user operates and the other one is responsible for searching which one to be operated.
Figure 4.1: Agent-Based Model
4.2.2
Structure of OAA
The OAA is shown as Figure. 4.2. The main component in OAA is facilitator, being responsible for distributing the task to the specified agent. All agents must register their solutions in facilitator, or the facilitator would not pass the task the the agent without
registering. The Interagent Communication Language (ICL) developed by SRI is the form of communication between agetns and he facilitator.
In 1996, the Agent Development Toolkit (ADT) [21] is proposed as a IDE. And the OAA is wide range to be applied. As Section 2 mentioned, the MIMUS applied the OAA in its architecture.
Figure 4.2: Open Agent Architecture
4.3
Structure of Proposed Mode with OAA
We introduce the structure of our model with the hybrid approach, as shown Figure 4.3. As mentioned in Section 3, the NLP would analysis the sentence from the user. The task generator extracts the tagged word from the result form the NLP. The facilitator would pass the tagged word to the appropriate manager.
At first, we have to launch the facilitator, and we launch the component manager and the behavior manager, as shown Figure 4.4 The behavior manager registers its function in
facilitator.
Figure 4.3:Structure of Proposed Model with OAA
facilitator accepts the requests of registering from the two managers.
4.4
summary
In summary, we introduce the hardware and software environment in our design We introduce the architecture of Open Agent Architecture (OAA),and how we use the structure of OAA to design and implement REM in mentioned environment.
Figure 4.4:Facilitator with One Manager
Chapter 5
Analysis
In this chapter, we would introduce the actions of REM in four case. In Section 5.2, we discuss the effect of REM in the dialogue manager with different approach.
5.1
Case Study
According the task we defined before, we list several situations about the missing information of the task. we would continue using the notation Cx, bxand Dxto composed a
task.
We denote the verbs to bxi and nouns to Cxbased on our model. We list all possible cases.
I. Task with Cx
II. Task without Cx
III. Task with bx
IV. Task without bx
There is a table as show (Table 5.1)
We follow the definition of degree of complexity allocated to each task.[17] A simple task includes only one bxi, a complex task requires more than one bxi. On the other hand, the task
what remembered the previous information is complex, as referential relations.[22][23] We analysis four cases. In our proposed model, we can handle more than one bxi. In
following case, we just discuss the situation with one bxi.
Table 5.1: Case Study NP
I II
VP III Case 1 Case 2 IV Case 3 Case 4
the other side, the command sending to devices is depended on bxi not previous device
information. So, there is no need to analysis overly complex tasks in this paper.
The situation of lack of Dxis similar with lack of Cx. So, we only discuss the lack of Cx.
5.1.1
Case 1
In case 1, our system receives the sentence with Cxand bxi. In principles, the actions of
system are independent because the independence of behaviour manager and component manager. So there is a new bxi , the system registers the bxiin dataset and update the device ID
of bxi. And there is a new Cx, the system registers the Cxin dataset and update the device ID
of bxi.
As mentioned above, we analysis four situation as show (Table 5.2)
Existing bxi and Existing Cx It's a general situation with complete sentence. All bxi and Cx
in user command existed in dataset. Because of this, our system acts normally.
Existing bxi and new Cx If there is only Cx not in the dataset, our system still registers the
Cx and update device ID in existed bxi. Next,our system updates the device ID of bxi. In doing
so, our system can judge the logic of bxi next time.
New bxi and Existing Cx If there is only bxi not in the dataset, our system still registers the
bxi and update device ID in bxi. But, no need to register the Cx. The situation is very similar to
Table 5.2: Case 1
I Cxin NPs
Existing Cx New Cx
III bxi in VPs
Existing bxi No register No update Register Cx Update
de-vice ID of bxi
New bxi Register bxi Update
de-vice ID of bxi
Register Cx and bxi
Register device ID in bxi
Table 5.3: Example of Case 1 Turn on the TV in the bedroom [Turn on] is an existing bxi , [TV] is an existing Cx
No register No update [Turn on] is an new bxi , [TV] is an existing Cx
Register [Turn on] Update device ID in [Turn on] [Turn on] is an existing bxi, [TV] is an new Cx
Register [TV]
Update device ID in [Turn on] [Turn on] is an new bxi , [TV] is an new Cx
Register [Turn on] and [TV] Update device ID in [Turn on]
New bxi and new Cx Even the sentence includes bxi and Cx, the bxiand Cxare not in dataset.
Our system not only registers bxiand Cx in dataset but also update the device ID in bxi. In
doing so, our system can distinguish the bxi and Cxnext time.
We take a t for a example. 5.3
5.1.2
Case 2
In this case,the dominated factor is the Cx. The factor Cxwould dominate the action of
our system. If there is a new Cx, the system have to register the Cx. On the other hand, the
system loads the bxi when the Cxis existed in dataset. In fact, We define a component not only
deviceCxbut also description of device Dx, including location and features. We use Cxand
Dx to describe a complete component.
The point of case 2 is system how to handle the situation that there is not any bxi in user
Table 5.4: Case 2
II Cxin NPs
Existing Cx New Cx
III bxi in VPs
NULL Load bxi according to user file Register Cx
NULL Load bxi according to user file Register Cx
Table 5.5: Example of Case 2 TV in the bedroom
[TV] is an existing Cx Load bxi according to user preference
[TV] is an new Cx Register [TV]
And there is a table as show (Table 5.4)
5.1.3
Case 3
In this case, we pay attention on bxi -- lack of device type, only behaviour, as show
(Table 5.6). The user's input includes only behaviour bxi. we can expect the bxidominates the
flow of our system.
There are two possible action. First, user gives a bxiwhich the system can't realize. Our
system registers the bxi without device ID,because there's no Cx in user's input. Second, bxi
form user's sentence exists in dataset. Our system can load the existed Cx from device ID of
bxi according to the behaviour mapping table.
We take a sentence for a example. 5.7
Table 5.6: Case 3
I Cxin NPs
NULL NULL
III bxi in VPs
Existing bxi Load device ID from bxi Load device ID from bxi
Table 5.7: Example of Case 3 Turn it on in the bedroom
[Turn on] is an existing bxi Load device ID from [Turn on]
[Turn on] is an new bxi Register [Turn on]
5.1.4
Case 4
There is a situation we do not handle. A sentence without any bxi and Cxis not a legal
command. Because lack of information can not be a complete command,we preclude this situation.
5.2
Discussion
We would discuss the dialogue systems with REM or without REM. As we mentioned Section ??, the REM would fill the missing information in a task. The dialogue manager with REM would receive the task with Cx, bxand Dx, if REM could find the solution. The dialogue
manager without REM would query database or ask user for missing information.
5.2.1
Finite-sate approach with REM
The dialogue manager in finite-state approach needs the a series of ordered words or phrases to be input. The dialogue manager with FSM should check the elements in task in ordered. If the input is not intact, the dialogue manager may stuck.
The REM would deal with the missing information, the dialogue manager could receive the task with full information. The dialogue manager with REM could decrease the size of dialogue and work well.
5.2.2
Frame-based approach with REM
The dialogue manager with frame-based approach fills the designed slots. The element in a task which we determined would be filled in the designed slots. The dialogue manager with frame-based approach would ask users for missing information.
The sub-models in REM could guess the missing information. The dialogue manager could receive the result from REM to fill the slots, not to ask users for missing information.
Chapter 6
Conclusion
The REM could decrease the complex process querying data of dialogue manager about missing information. The dialogue manager does not ask user after the REM.
The basic concept of REM is finite state machine with a series of judging. Because the form of the task is fixed, we apply the finite state machine in determine mechanism even the finite state machine with shortage in scalability. The sub-models deal with the missing information and the unknown element in a task.
If missing information happens, the REM works based on the information of task, as device or behavior. The REM would choose different action based on the device or behavior in the task. With behavior mapping table or component mapping table, the REM could find the corresponding solution to the task with missing information.
By the determined task, we design the REM with distributed agents for missing
information. The form of a task would assist REM to diagnose the state of a task, sub-models in REM could find the solution.
The Rational Exception Model (REM) would help the dialogue manager to analysis the state of dialogue. The sub-models in REM would query the missing information and determine the logic of behavior for corresponding device with distributed agents. The dialogue manager does not query the missing information with mentioned approached.
Chapter 7
Future Work
Future work in our research is to refine the mapping table with more efficient approach. We choose the simple approach, weight column in mapping table, to infer the solution.
For this purpose, we could query database on-line and determine the relationship between the keyword we searched and the result. For example,we could search the keyword "turn on", the result would be the short sentence "turn on the radio". The short sentence included the corresponding device "radio" for the keyword "turn on". We can refine our mapping table by determining the relationship between "turn on" and "radio".
References
[1] D. Traum and S. Larsson, ''The information state approach to dialogue management,'' in Current and New Directions in Discourse and Dialogue, 2003, pp. 325--353.
[2] A. Cheyer and D. Martin, ''The open agent architecture,'' Journal of Autonomous Agents and Multi-Agent Systems, vol. 4, no. 1, pp. 143--148, March 2001, oAA.
[3] M. F. McTear, ''Spoken dialogue technology: enabling the conversational user interface,'' ACM Comput. Surv., vol. 34, pp. 90--169, March 2002. [Online]. Available:
http://doi.acm.org/10.1145/505282.505285
[4] M. M. University and M. F. Mctear, ''Modelling spoken dialogues with state transition diagrams: experiences with the cslu toolkit,'' in Proc 5th International Conference on Spoken Language Processing, 1998, pp. 1223--1226.
[5] B. Hansen, D. G. Novick, and S. Sutton, ''Systematic design of spoken prompts,'' in Proceedings of the SIGCHI conference on Human factors in computing systems: common ground, ser. CHI '96. New York, NY, USA: ACM, 1996, pp. 157--164. [Online].
Available: http://doi.acm.org/10.1145/238386.238466
[6] H. Aust, M. Oerder, F. Seide, and V. Steinbiss, ''The philips automatic train timetable information system,'' Speech Commun., vol. 17, pp. 249--262, November 1995. [Online]. Available: http://portal.acm.org/citation.cfm?id=219030.219079
[7] D. S.-H. C. Chin-Han Tsai, ''A study on speech dialogue system and dialogue strategy,'' July 2005.
[8] M. Guo, Y. Liu, and J. Malec, ''A new q-learning algorithm based on the metropolis criterion,'' EEE Trans Syst Man Cybern B Cybern, vol. 34, pp. 2140--3, 2004. [Online]. Available:
http://www.biomedsearch.com/nih/new-Q-learning-algorithm-based/15503510.html
[9] E. Levin, R. Pieraccini, and W. Eckert, ''Using markov decision process for learning dialogue strategies,'' in Proc. ICASSP, 1998, pp. 201--204.
[10] H. machine-dialog Corpora, W. Eckert, E. N�th, H. Niemann, and E.-G.
Schukat-Talamazzini, ''Real users behave weird - experiences made collecting large human-machine-dialog corpora,'' 1995.
[11] S. Sutton, R. Cole, J. D. Villiers, J. Schalkwyk, P. Vermeulen, M. Macon, Y. Yan,
E. Kaiser, B. Rundle, K. Shobaki, P. Hosom, A. Kain, Johan, J. Wouters, D. Massaro, and M. Cohen, ''Universal speech tools: The cslu toolkit,'' in In Proceedings of the
International Conference on Spoken Language Processing (ICSLP, 1998, pp. 3221--3224.
[12] M. F. Mctear, ''Using the cslu toolkit for practicals in spoken dialogue technology,'' in University College London, 1999, pp. 1--7.
[13] C. L. Liu, Elements of discrete mathematics, 1977.
[14] J. Chu-Carroll, ''Mimic: an adaptive mixed initiative spoken dialogue system for
information queries,'' in Proceedings of the sixth conference on Applied natural language processing, ser. ANLC '00. Stroudsburg, PA, USA: Association for Computational Linguistics, 2000, pp. 97--104. [Online]. Available:
[15] J. Chu-Carroll and M. K. Brown, ''An evidential model for tracking initiative in collaborative dialogue interactions,'' User Modeling and User-Adapted Interaction, vol. 8, pp. 215--254, February 1998. [Online]. Available:
http://portal.acm.org/citation.cfm?id=598279.598319
[16] J. G. Amores, G. Pérez, and P. Manchón, ''Mimus: a multimodal and multilingual
dialogue system for the home domain,'' in Proceedings of the 45th Annual Meeting of the ACL on Interactive Poster and Demonstration Sessions, ser. ACL '07. Morristown, NJ, USA: Association for Computational Linguistics, 2007, pp. 1--4. [Online]. Available: http://portal.acm.org/citation.cfm?id=1557769.1557771
[17] P. Manchón, C. del Solar, G. Amores, and G. Pérez, ''Multimodal interaction analysis in a smart house,'' in Proceedings of the 9th international conference on Multimodal
interfaces, ser. ICMI '07. New York, NY, USA: ACM, 2007, pp. 327--334. [Online]. Available: http://doi.acm.org/10.1145/1322192.1322249
[18] T. Project., Talk and Look: Linguistic Tools for Ambient Linguistic Knowledg, 2007. [Online]. Available: www.talk-project.org
[19] P. M. Portillo, G. P. García, and G. A. Carredano, ''Multimodal fusion: a new hybrid strategy for dialogue systems,'' in Proceedings of the 8th international conference on Multimodal interfaces, ser. ICMI '06. New York, NY, USA: ACM, 2006, pp. 357--363. [Online]. Available: http://doi.acm.org/10.1145/1180995.1181061
[20] N. Chomsky, Syntactic structures, 1957.
[21] A. C. G.-L. L. David L. Martin, ''Development tools for the open agent architecture,'' vol. PAAM 96. SRI AI center, April 1996.
[22] L. Ahrenberg, A. J�nsson, and N. Dahlb�ck, ''Discourse representation and discourse management for a natural language dialogue system,'' in In Proceedings of the Second Nordic Conference on Text Comprehension in Man and Machine, Taby, 1990.
[23] J. Hawkins, ''Definiteness and indefiniteness: A study in reference and grammaticality prediction,'' 1978.