行政院國家科學委員會專題研究計畫 成果報告
智慧型機房監控系統之溫控模組設計
計畫類別: 個別型計畫 計畫編號: NSC93-2622-E-002-032-CC3 執行期間: 93 年 11 月 01 日至 94 年 10 月 31 日 執行單位: 國立臺灣大學電機工程學系暨研究所 計畫主持人: 陳永耀 計畫參與人員: 陳炫綜 報告類型: 精簡報告 處理方式: 本計畫為提升產業技術及人才培育研究計畫,不提供公開查詢中 華 民 國 95 年 2 月 13 日
計畫中文摘要
關鍵詞:智慧型系統,溫度控制,監控系統 本計劃之主要內容在於與捷萌科技及遠傳電信合作開發機房監控系統主機 之溫控模組。捷萌科技為工業及專業監控廠商,主要之業務在提供電信業者基地 台監控之軟硬體系統。由於未來3G 系統之發展,取得 3G 執照之廠商正快速佈 建3G 系統之基地台,捷萌科技除原有之 GSM 基地台監控業務外,亟欲發展具 智慧型功能之智慧型監控主機系統,以整合基地台內各項設備之監控功能。其中 一項功能即為機房之溫控功能,目前機房之溫度控制僅以定時與定溫裝置進行開 路控制。本計畫規劃採用以模糊規則庫為主體之智慧型控制方法,依機房內雙冷 氣機之架構,探討有效之智慧型溫控與配置(dispatch)機制,以達成有效控制與 節約能源之目的,其後並將開發製造溫控模組,以實體完成智慧型溫控功能於監 控主機之內。計畫英文摘要
Keywords:Intelligent System, Thermal Control, Monitoring System The purpose of this project to develop an intelligent thermal control module to work with a base station monitoring system. The collaborating company of this project, the Gemnitech is a professional monitoring system supplier. Its major clients are the mobile phone service companies, such as China Telecom, Taiwan Mobile and so on. The deployment of GSM as well as the coming 3G service require a great number of base stations implemented across the service area. Gemnitech has been in this business since 1994 and has been quite successful in taking a handsome share of the market. However, it is the current goal of Gemnitech to develop an intelligent monitoring system. Among all the functions the monitoring system is going to provide, thermal control is a critical one.
In this project, an intelligent fuzzy rule-based thermal controller will be designed and implemented. Usually, the thermal control in a base station is accomplished by simple open-loop schedule control, or more advanced PID control. The performance of such systems are never optimal in any sense. The issues of energy efficiency and system reliability can be greatly enhances if an intelligent control algorithm is devised.
It is also quite common that two air-conditioners be adopted in the base station thermal control system. However, the major function of such an implementation is merely to release the load into two machines instead of one. More intelligent considerations can fit into such a situation by designing an intelligent load dispatching system, such that not only the two machines take turns, but also to include factors such the machine life and machine efficiency. The thermal control module will also be made into boards so that a real prototype can be made and check to see if the expected performance can be achieved.
目錄
計畫中文摘要...I 計畫英文摘要... II 目錄... III 一、前言...1 二、研究目的...1 1.基地台系統簡介... 2 2.基地台智慧型負載配置 ... 3 3.基地台智慧型溫度控制器設計 ... 3 三、文獻探討... 4 四、研究方法與原因... 7 1.基地台系統模型... 7 2.控制器理論與設計 ... 9 3.模糊控制理論簡介 ...14 4.基地台空調模糊控制器的設計 ...16 4.1 溫度輸入模糊化介面 ...17 4.2 知識庫...22 4.3 模糊推論機...23 4.4 解模糊化介面...25 5.利用Matlab模擬基地台的空調控制器 ...26 5.1 基地台控制程式運算流程 ...27 6.基地台空調系統模擬結果 ...31 五、結果與討論...47 六、結論...49 參考文獻...51一、前言
在進入新的世紀以來,享有優裕的生活環境並兼顧生態保護已成大家追求的 目標與共識。台灣近年來空調冷凍工業蓬勃發展,例如目前中小型冷氣機需求量 已達每年近一百萬台,產值則達致每年三百億元。除了一般生活家電外(包含除 濕機、冰箱、冷氣機等),其他如大型冰水系統、熱泵,以及食品、製藥、半導 體、航太有關的環境控制系統也都與空調冷調冷凍工業有密切的關係,因此如何 發展大規模、更有效率的空調設備及提升空調設備所要求的精準度, 乃是工程 師努力的目標。 溫控系統在機房監測系統之應用相當廣泛,因為在無人機房中為避免電子設 備,因為溫度的升高,而失去穩定之操控性,溫度之控制有其必要性,但以往之 溫控系統往往藉助相當簡易之PID 控制,甚或以開路控制的方式為之,因此效 能並非十分顯著,所以藉由智慧溫控系統的應用,由於其非線性與智慧型之特 性,應可有效改善溫度之恆定性與能源效率,達成環保之要求,提升其經濟效率。二、研究目的
本計畫研究之主要目標在以配合捷萌科技所規劃開發之機房監控系統智慧 型溫控模組,針對遠傳基地台所使用之雙冷氣機溫控系統,藉由自動化溫度 控制模組的設計,使得在機房中的控制主機,在節約能源的前提下,達到溫度控 制的要求。1. 基地台系統簡介 目前遠傳已將基地台的大小統一規格,實際基地台的尺寸大小為4050 (L )x 1800 (W) x 2520 (H) mm3,其熱傳導係數為0.0208(W/mK)(如圖1),其 內部架設三套通訊設備其功率共約4620瓦,並利用兩部機型PA0392B的東元冷 氣以每六小時輪流運轉方式散熱(如圖2),使內部之通訊設備(如圖3),保持 在工作溫度不超過攝氏40度以上。目前遠傳為了確保效能,將工作溫度設置在 攝氏22度,似乎有太過於保守之虞,由此可知,基地台本身最主要的能源,將 是由空調系統所消耗,因此本計畫希望能發展一智慧控制器,使機台能在最節省 能源的情形下正常運作。 圖1 基地台外觀圖 圖2基地台之空調系統 圖2 基地台之空調系統
左圖機台內 部設備圖示 於右 圖3 基地台內部通訊設備 針對智慧控制器,其主要的設計概念可分為兩方面分述如下。 2. 基地台智慧型負載配置 由於機房溫控系統採用雙冷氣機架構,以輪流運作之方式,進行負載調配, 以避免可能之當機狀況,提升系統可靠度,此方法由於簡單,不需複雜之控制器, 只要安裝定時器並控制繼電器交換冷氣系統運作即可,因此受到目前基地台系統 的青睞,但也由於太過簡單,並沒有考慮到外界環境參數的變化(如外氣溫度, 內部負載的調配等),因此也就喪失能主動調節能量的功能,使得目前的基地台 系統,均需耗費大量的電力成本,本計畫將設計智慧型負載配置演算法,以更有 效之方式提升能源使用效益與系統可靠度。 3.基地台智慧型溫度控制器設計 另外針對目前控制器無主動控制的功能使得目前許多機房溫控系統僅採取 定時定溫之溫度控制方式,可能造成在氣溫低時,冷氣主機依然保持運轉,浪費 冷氣能源。或在氣溫高時,無法供給冷卻之需求,使主機處於較差之工作狀態,, 因此本計畫規劃以模糊邏輯規則庫之方式發展智慧型溫控系統,不但可以因應外 界環境的變化,有主動控制的功能,並且考慮內部負載的調配,因此應可有效改 善系統表現。
三、文獻探討
自從 1973 年能源危機之後,能源節約的觀念逐漸被大眾所接受,各式各樣 的節能系統也就因應而出。時至今日,隨著高科技技術的發展,電子、電機設備 需具備自動節能系統的呼聲也越來越高。因此,越來越多的人力加入相關的研究。 目前國內外在這方面的研究狀況如下:
1. Deakin University , Australian – Thermal Control with Image Processing and Fuzzy controllers
利用影像處理辨識熱影像(thermal image)上不同的溫度區域,藉此獲 得溫度的分布及影響範圍,以完成模糊溫度控制。藉由熱影像,其溫度資訊的取 得能更為迅速也更為精確,令模糊神經網路控制系統能更有效率的執行工作。 2. University of Regina , Canada – A Fuzzy Logic and Rough Sets Controller for HVAC Systems
此篇論文針對 HVAC(Heating , Ventilating and Air Conditioning)系統,
提出以模糊邏輯或Rough Sets 理論來進行控制調節。此控制器適用於溫度及濕
度的調節,在經由實驗結果驗證後,發現模糊邏輯的控制效果較Rough Sets 更
好,但兩者皆可達成所需之控制。
3. Iran University of Science and Technology , Iran – A Hybrid Fuzzy Logic and PID Controller for Control of Nonlinear HVAC Systems HVAC (Heating,Ventilating and Air Conditioning)系統是一個具多種價
值、非線性及nonminimum phase 的系統,要設計如此一個系統是相當困難的。
此篇論文提出一個新的控制方法,混合了 PID 控制與模糊控制兩種方式,進行
模擬測試。其實驗結果相當優異,可證明此方式有比單一 PID 控制更好的控制
表現。
Method and Application in HVAC
提出一個簡單實用的模糊適性控制在此篇論文被提出,其針對於 HVAC (Heating ,Ventilating and Air Conditioning)系統,且控制方法著重於穩定性及
系統要求的基礎問題上,模擬結果則證明其優於PID 控制。
5. Concordia University, Canada - Thermal Environment and Control laboratory 研究發展以統一的方式,以達成對空調系統的監控、控制與診斷。其實驗室 將研發、測試新的控制策略,並對不同的感測器、致動器和控制器進行效果的評 斷。 圖4 Two-Zone VAV 6. 彰化師範大學工業教育學系-應用模糊控制在空調舒適度及省能控制之研究 一般而言, 空調控制的目的大多是使空調空間維持一定的舒適度, 這個目 的並不難達到。但若要同時兼顧省能的效果,就需要更進一步的琢磨。本研究利 用模糊控制理論為控制工具。根據ASHRAE 的有效溫度曲線及空氣焓值理論中 最小焓值法為控制原理,設計出在夏季及冬季等不同的空氣條件下,具人性化的 空調控制器。此空調控制器,對不同溫的溫溼度環境會有不同的溫度及溼度設定 值,因而隨時調整室內送風機的送風量,使室內空調的溫度與溼度維持在適合人 體的舒適區,同時減少空調負荷,達到降低電力負載的目的。
Investigation of HVAC Systems Using the PMV Index 利用水冷式空調系統對環境進行新舒適度指標及室內溫度之糢糊控制,並將 控制結果與傳統溫濕度空調控制方式比較之。本論文所提出之新舒適度指標空調 控制方式為以維持空調區之室內溫度於恆定、同時利用風速將新舒適度指標值控 制在理想狀態(PMV = 0),以改善傳統溫濕度空調控制方式僅以維持環境變數 於恆定、無法掌控空調區中人員舒適程度的缺點。在控制方式的選擇方面,本論 文之新舒適度指標空調控制方式採用PD 糢糊控制以改善傳統溫濕度空調控制方 式所廣泛採用的ON/OFF、PID 控制方式誤差量大、影響環境變數控制結果之 缺點。 在感測器佈置方式之選擇上,本論文之新舒適度指標空調控制方式以鄰近人 員活動範圍四周的感測器佈置方式回饋正確、完整之環境變數訊息,改善傳統溫 濕度空調控制方式感測器數量不足、設置點不適當所造成空調區環境變數無法正 確控制於目標值之缺點。 在提升空調品質方面上,本論文之新舒適度指標空調控制方式利用風速的控 制增加室內溫度對人員舒適程度之影響,減少人員到達理想舒適狀態之時間。在 減少空調能源方面,本論文之新舒適度空調控制方式利用風速的控制,在不影響 人員舒適程度之情況下,提升室內溫度目標值於較高範圍,改善傳統溫濕度空調 控制方式室內溫度目標值偏低、空調能源高居不下之缺點。 經由以上之討論,可知Fuzzy control 在空調系統中各種性能的討論及應用 上,已經行之有年並且獲得良好的經驗,尤其是針對空調系統對人體舒適度的討 論以及節能空調的研究上,因此相信利用Fuzzy control 應可順利改善本計畫的 問題,獲得良好的成果。
四、研究方法與原因
1. 基地台系統模型 為了使將來在設計控制器時,能以電腦輔助的方式設計,減少在實際設計控 制器時所花費的時間,所以本計畫在實際裝置感測器之前,先預先建立系統的溫 度模型,並以電腦模型Matlab 分析基地台本身的系統,以及安裝空調控制系統 的情形,並與實際所量測的之數據作比較,以應證溫度量測之準確性。 由於電力能源的消耗與空調系統的運轉呈現正比的關係,而空調系統的運 轉,與設定的工作溫度有關,一般來說,當室溫超過設定的工作溫度一定範圍時, 就會啟動空調系統的壓縮機,反之當室溫低於設定的工作溫度一定範圍時就會關 閉空調系統的壓縮機,只剩下風扇運轉,(要在一定範圍內切換運轉,是為了避 免開關連續切換,會損耗多餘的能源及機器壽命),因此可以建立起一溫度系統, 與電力消耗之關係。 再由熱力學第二定律及熱傳學的理論可知,溫度的上升,也就是熱量的傳遞 可分為三種方式,第一種方式為傳導,也就是指靜止的固體(或流體)因互相碰 觸,由高溫將熱量傳到低溫的現象,稱之為熱傳導,假設溫度的改變是一維方向, 其簡化後的傅立葉定律可寫成 ),0.0208 mK W ( t coefficien Conduction : K ) ( : m) thickness( : ) ( : : 1 2 m Area contact A L K T T T W q conduction for L A k R G R T q low hig t K t − = ∆ × = = ∆ =∑
∑
) 熱量( (1) (2)第二種方式是對流熱傳,此方式及指流動的流體與接觸之固體表面產生的熱 交換現象,它的傳熱量可由牛頓冷卻定律來計算,它可寫成 (3) 300 ~ 30 25 ~ 5 ), m W ( : h ) ( : ) ( ) ( 熱量 : : 1 2 r 2 or K t coefficien convection m Area contact A K T T T W q convection for A h R G R T q low hig r t H t − = ∆ × = = ∆ =
∑
∑
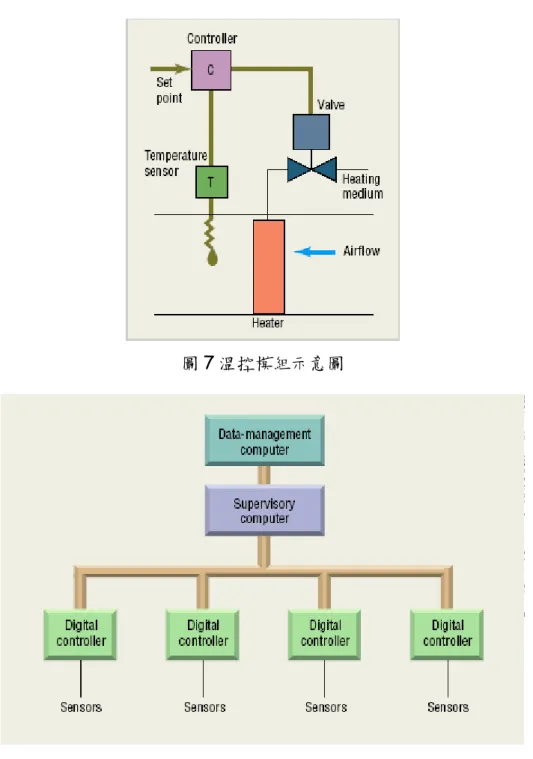
(4) 第三種方式為熱輻射,其本身因為電磁波的特性,所以傳遞熱量不需要經過 介質,由史蒂芬-波茲曼定律 (5) ) 波茲曼常數( 放射率 物體之絕對溫度 4 2 -8 10 5.6 : : : k m w T T q S S × × × = ′′ σ ε σ ε 考慮實際基地台的情形,由於基地台本身,沒有窗戶,所以不考慮熱輻射的 效應,只考慮基地台本身溫度主要只受到外界陽光溫度的傳導作用(分為五個方 向照在基地台上,東南西北及上方。一般來說溫度變化介於22~35℃間)以及機 房本身設備溫度的對流作用兩個原因的影響,建立其數學模型,在套入 Matlab 軟體裡,建立其溫度模擬圖,而其實際安裝的咸應器的位置如圖5。溫度感測器 1 裝於屋外屋頂正中央,溫度感測器 2 裝於屋外南邊牆壁長度一半,高度距離屋 頂1/3 處,溫度感測器 3 裝於屋內正中央,溫度感測器 4 裝於屋內通訊設備機 器內。2 3 1 基地台 通訊設 備 4 圖5 溫度感測器安裝圖 :表示溫度感測器位置 2.控制器理論與設計 一般來說數位節能系統主要包括輸入、輸出、調節器、軟體、執行架 構、連結網路、調控設備等等。藉由感測器輸入的資料,利用電腦做資料 處理,再輸出訊號至調節器,而利用調節器控制空調設備,來達到溫控的 結果。圖6 為溫控系統的大體架構圖。圖7 則為控制主機中,控制模組的示 意圖。圖8 為控制模組的架構圖。圖 9 為圖 8 中數位控制器的細部圖。 圖6 溫控系統架構圖
圖7 溫控模組示意圖
圖9 數位控制器細部圖 但是在目前傳統的機房溫控系統,還是利用以下幾種古典的控制理論,其控 制動作分別為:二位置控制,比例控制,比例積分控制及比例微積分控制等。 1. 二位置控制 : 二位置控制又稱 ON/OFF 控制,設定機器於 ON/OFF 兩者之間運轉,一般 應用於要求精度較小及規模較小之系統。圖10 所示乃控制動作與溫度變化示意 圖。當系統溫度低於所設定溫度(70 度)時,將啟動加熱器,使系統溫度上升, 當系統溫度高於所設定溫度時,就會關閉加熱器,使系統保持在一定的溫度範圍 內,而一般此設計均會加入dead zone 的設計,比方說高於設定溫度 2 度及低 於設定溫度 2 度才會執行關閉及啟動加熱器的動作,使加熱器不會在單一設定 溫度一直變化,減低加熱器壽命。
圖10 二位置控制之溫度變化與控制動作[4] 2. 比例控制 : 比例控制(proportional control)又稱 p 控制(如圖 11),乃根據目標值 與量測值之偏差比例而動作故稱為比例控制。其精準度較二位置控制為高,其特 徵為儘管在有變動的負載下依舊可以得到穩定的控制,由於此特徵,故主要用於 精度要求不是很高之一般場所如辦公室等之室溫控制。 e Y(s) 圖11 比例控制 3. 比例積分控制: 比例積分控制(proportional-integral control)又稱為 PI 控制(如圖 12), 當目標值和控制量不同時,以對應此誤差的速度來修正偏差值,盡可能以偏差為 零來運作,PI 控制乃使用於精度要求較高的控制,其穩態誤差較 p 控制為佳, 在頻域控制上,可視為一個低通濾波器,有抑制高頻雜訊的作用。 r(s) KP Plant Y(s)
圖12 比例積分控制 4. 比例微積分控制: 比例微積分控制,通常又稱為PID 控制(如圖 13、圖 14),乃是比例動作、 積分動作與微分動作的組合 系統具有較佳的頻寬,使系統較早穩定,降低overshoot,並且使穩態誤差也獲 。其操作量乃變化速度的比例。其控制的特性可以使 得改善。 圖13 PID 控制方塊圖 圖14 PID 控制步態反應圖 e Y(s) r(s) KP Plant Y(s) Ki/S r(s) e KP Y(s) Ki/S KdS Plant Y(s)
不過以上之控制器其控制效果多不理想,且必然耗費相當能源。另外由於空
調負載的控制特性是屬於非線性時變(nonlinear & time-variant)的系統,因此若
要以線性化的工具來加以處理,其難度較高,故可使用解決非線性時變問題的模 糊控制理論,方得以解決此問題。 機房溫控為提昇系統之可靠度(reliability)往往採取雙冷氣機之設計,使兩 者能交替工作,並互相支援。然在控制模式上,由於缺乏智慧型配置演算,往往 只能達成交替工作之任務,而不具有相互支援之功能。本計劃根據雙冷氣機之配 置,將探討雙主機運轉下,在能源與可靠度之考量下,其運作模式之設計。 本計畫擬以遠傳基地台實際的冷凍空調數值,以模糊邏輯為基礎之規則庫控 制模式進行研究的分析設計。首先以一個遠傳基地台為對照組,取另外三個基地 台以智慧型控制方法分析雙冷氣機房之控制架構,考慮冷氣機使用壽命,冷氣效 率及環境狀態,進行控制器的設計改造以期達成更佳之溫控效果,來達到節省能 源的目的。 3. 模糊控制理論簡介 傳統的科學技術,完全取決於它有一個明確的數學定義。但在我們熟知且身 處的真實世界,普遍存在著各種無法用明確的數字或數學定義表現的模糊性現 象,例如:人的高矮、溫度的冷熱及光線的明暗等。 因此 1965 年美國加州大學柏克萊分校的 Lotfi A. Zadeh 教授,首先在 Information and Control 期刊上提出了模糊集合論(Fuzzy Sets)論文,是為模
糊理論(Fuzzy Theory)的濫觴,它是將人類主觀性的思考、判斷的不確定性做
量化的處理,來表達直實世界中無法明確定義的模糊性概念。Fuzzy 理論把傳統
數學從二值邏輯(binary logic)擴展到連續多值邏輯(continuous multi-value),
利用歸屬函數(Membership Function)描述一個概念的特質,亦即使用 0 和 1 之間的數值來表示一個元素屬於某一概念的程度,這個值稱為元素對集合的歸屬
度(Membership Grade)。當歸屬度為 1 時,表示該元素百分之百屬於這個概念; 當歸屬度為0 時,則表示元素完全不屬於這個概念:介於兩者之間的就是完全屬 於和完全不屬於之間的灰色地帶。即在完全屬於(1)和完全不屬於之間(0) 之間還允許存在有"非完全屬於"和"非完全不屬於"。等例如 0.9、0.1…,歸屬度 的各種情況出現,這也就是說它是將傳統明確集合中 「絕對屬於」只有完全屬 於(l)和完全不屬於(0)的概念擴展至「相對屬於」(0~1)的概念,承認領城中不 同的元素對於同一集合有不同的隸屬度,藉以描述元素和集合的關係,並進行度 量。 例如,一般而言,氣溫只要超過37℃就算是高溫,因此氣溫只要高於 37℃, 其歸屬度都是 1,而 37℃以下,就可以分別給予一個小於 1 的值,當作這個氣 溫屬於「高溫」這個概念的程度,如 35℃可以把其定義其為歸屬 0.8,以此類 推,直到27℃就"完全"稱不上高溫了,因此可把低於 27℃的氣溫,定義其對於 「高溫」歸屬度都是0,如圖 15 所示。 圖15 利用歸數度表現高溫這個概念 在的1973 年,Lotfi A. Zadeh 教授又提出一模糊思考的概念,他說:「人 類的思維過程中充滿了模糊觀念,這表示人類推理背後所運用的運輯多半非兩 值,或是多值運輯,而是具有模糊真值、模糊連接和模糊推論的運輯」,也就是 人類的思維裡有許多的不確定、似是而非的思考,在辨別的過程中用可能的程度 思考方式來組成人類的思維。1974 年,在英國倫敦大學 QuleenMary 分校的 Assilian 教授和 Mamdani 教授根據模糊集合論提出的模糊邏輯控制理論(Fuzzy
Logic Control),並將此方法應用於蒸氣渦輪引擎自動運轉系統上,進而引起了 學者們競相研究,奠定了模糊邏輯理論控制在工程控制上的重要性。在1980 年 代以後,模糊邏輯控制進入了實用化的階段,第一個實用化的例子是由史密斯公 司所開發的水泥窯自動運轉機,自此糢糊邏輯控制器的應用如雨後春筍般地蓬勃 發展,並獲得許多研究人員的投入,使得往後出現更多的成功應用範例,地下鐵 自動駕駛系統、水位控制系統、貨櫃天車自動運轉系統、電梯群管理系統、影佳 辨識系統等。模糊理論發展至今已經快40 年了,應用的範圍相當的廣泛,在各 種應用科學上都可以發現模糊理論研究的蹤跡與成果。 在工程應用方面: 1.型樣識別(Pattern Recognition.): 臉型辨識、文字辨識、語音辨識、手寫輸入辨識、車牌號碼辨識及雷達應用。 2.控制工程(Control Engineering) 家電控制、機械人控制、汽車控制、電力控制、地下鐵控制、PID 控制等。 3.信號及資訊處理(Signal and Information Processing)
影像處理、語音處理、貪料庫管理、資料查詢等。
4.人工智慧與專家系統(Artificial intelligence & Expert System)
股市趨勢預測、工業設計、行程安排、自動翻譯、醫療診斷、地震預測、經 營決策支援。 5.環保(Environmental Protection) 廢水處理、空間污染檢測、空氣品質監控等。 4. 基地台空調模糊控制器的設計 一般來說,模糊系統的架構如圖 16 所示,圖 17 則為模糊控制器的各個元 件,大致上分為四個部分:模糊化介面(fuzzification interface)、知識庫
(knowledge base)、推論機(inference engine)、解模糊化介面(defuzzification interface),以下就這四部分加以詳細說明。
e U 圖16 模糊控制方塊圖 圖17 模糊控制器基本架構圖 4.1 溫度輸入模糊化介面 模糊化介面的功能是將明確的外界輸入資料轉換成適當的語意式模糊資訊; 也就是將明確資料模糊化成模糊資訊,可將其視為一種映射,由明確的輸入空間 映射至特定之模糊集合空間。由於模糊系統的基礎是根於模糊集合理論,因此需 要一個模糊化介面來做為資料的前處理器。 模糊集合 模糊集合理論可視為傳統集合的擴張,在傳統集合中,元素與集合的關係是 相當明確的,僅有「屬於」與「不屬於」,並沒有程度上的差異,其元素與集合 r(s) Fuzzy control Plant Y(s)
的關係可由特徵函數(characteristic function)χA
( )
u 如(6)式來說明: ⎩ ⎨ ⎧ ∉ ∀ ∈ ∀ = A A u A µ µ χ , 0 , 1 ) ( (6) 而人類的思維、推理及對周遭事物的感覺,本質上都是相當模糊的,因此仰 賴精確數學的傳統分析方法,已不能完全適用於任何具複雜性與人類系統有關之 問題上,而必須以模糊的分析法取代傳統的數量方法。 模糊集合理論中,對於某一模糊集合間的關係,不再是傳統的「屬於」或「不 屬於」二分法,取而代之的是某種程度的屬於,即由非0 即 1 的選擇,推展至 0 ~1 之間的任何值,可依敘述的強度對應出不同的反應,稱之為歸屬函數 (Membership Function)。 圖18 和圖 19 的分別表示由傳統集合的特徵函數及模糊集合的歸屬函數來描述 氣溫低溫的概念。 圖18 以傳統集合的特徵函數來描述氣溫低溫的概念圖18 以模糊集合的特徵函數來描述氣溫低溫的概念 一個在論域χ 中的 Fuzzy 集合 A~,可以使用在「1,0」區間取值的歸屬函數 A~ µ 來描述其特性。即歸屬函數可表示如(7)式閉區間的對應。 1 0 ] 1 , 0 [ : ~ ~ ≤ ≤ → A A µ χ µ (7) 而fuzzy A~集合,可以使用(8)式表示。
( )
({
µ µ µ∈χ = , |)}
~ ~ u A A (8) 其中µ 為論域 χ 的元素。歸屬函數值µA~的大小,則反應這個元素µ 屬於 FuzzyA~ 集合的程度。 歸屬函數 透過歸屬函數可以對 Fuzzy 集合進行量化,才能利用較精確的數學方法處 理模糊或界限不明確的事物。歸屬函數可分成數值及函數兩種定義方式。數值定 義方式又稱為離散化歸屬函數,它是直接定義有限Fuzzy 集合內每個元素的歸 屬度,並以向量的形式表現出來。模糊集合 A~其離散的歸屬函數可以下列(9)式 表示之:∑
∈ = i i i i A x x x A~ µ~( )/ χ (9) 其中符號”/”是分隔符號,其中右邊代表元素 x,左邊是代表元素 x 屬於 A~的程度,符號"
∑
"表示其為一離散型之歸屬函數。圖 20 所示,為以離散歸屬函數來 表示低溫概念。 圖20 以離散歸屬函數來表示低溫概念 函數定義方式叉稱為連續化(contiuous)歸屬函數,它是以不同形式的函數來 描述Fuzzy 集合。函數定義的表現,可以是無限 fuzzy 集合的元素及其歸屬度 之間的關係,也可以是有限 Fuzzy 集合的元素及其歸屬度之間的關係。其數學 表示為(10)式∫
= A~ µA~(x /) x (10) 其中符號”/”是分隔符號,其中右邊代表元素 x,左邊是代表元素 x 屬於 A~的程 度,符號” ”。表示其為一連續型之歸屬函數。其中∫
0≤ ~ ≤1 A µ ,若 0 ~ = A µ :表示元素x 不屬於此模糊集合。 5 . 0 ~ = A µ :表示元素x 屬於此模糊集合的程度為 0.5。 1 ~ = A µ :表示元素 x 屬於此模糊集合的程度為 1。 典型常用的有 π 函數(shape)、三角型(triangullar Shape)、梯型(trapezoid shape )等。分別如圖 21,圖 22、圖 23 所示。圖21π 函數 為變數 為固定之常數, 其中a b x b x for b a x s b x for b a b a b x s b a x , ) , ; ( 1 ) , 2 , ; ( ) , ; ( ⎪⎩ ⎪ ⎨ ⎧ ≥ − ≤ − − = π (11) 圖22 三角歸屬函數 為變數 為固定之常數, 其中a b c x c x for c x b for b c x c b x a for a b a x a x for c b a x t , , 0 ) ( ) ( 0 ) , , ; ( 2 ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎨ ⎧ ≥ ≤ ≤ − − ≤ ≤ − − ≤ = (12) (12)
圖23 梯型函數 為變數 為固定之常數, 其中a b c d x d x for d x c for c d x d c x b for b x a for a b a x a x for d c b a x t , , , 0 ) ( 1 ) ( 0 ) , , , ; ( ⎪ ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎪ ⎨ ⎧ ≥ ≤ ≤ − − ≤ ≤ ≤ ≤ − − ≤ = (13) 4.2 知識庫 知識庫是模糊控制器的核心,作為判斷輸出的依據。基本上模糊控制器是 一個採用規則決策的系統,規則由系統控制要求或專家的經驗所制定。知識庫是
由資料庫(data base)與模糊規則庫(fuzzy rule base)所構成,下列說明此兩部
份的功用: 資料庫 主要提供每一語言變數(即以自然語言的字或句子定義為模糊集合所需要 的定義,例如:輸出入變數的模糊分隔、歸屬函數的論域大小、形狀…等等,再配 合模糊關係合成運算子[compositional operators)與解模糊化的運算法則‥ 等,這些知識將用來提供模糊化、推論機、解模糊化等構件執行時使用。 模糊規則 它代表著整個控制系統的思考法則,其中所儲存的控制規則,是結合人們智
慧,把受控體的各種可能的狀態,以if-then 條列式的形式表成包含人類判斷之
模糊性的控制演算法則,設計的好壞影響到整個控制效果。一般形式如下表示:
IF(condition i) THEN (action i) i=1,2…q (14) q 為控制規則個數,其中前鑑部(condition i)是此系統有可能會遭過到的狀況, 而後鑑部《action i)是控制器在此狀況下對應所得之控制訊號。規則庫產生的方 式一般有下面幾種方法: (a) 直接轉換操作員的操作技巧與經驗為模糊語言控制規則。 (b) 根據受控體對控制輸入與系統輸出的反應去歸納受控行為,以試誤法進行設 計。 (c) 經由控制系統本身進行學習或修正控制規則,這是最系統的作法。 4.3 模糊推論機 當控制器的輸入已模糊化之後,接著必須依其所觸發的控制規則,去進行合成 的運算,以便推論出想要的輸出。而模糊推論便是藉由模糊邏輯的運算來模擬人 類思考判斷的方式,挑選模糊規則庫中適用的語意化控制法則,以並行的方式對 輸入的模糊化變數作運算,去求得模糊化之輸出。以下就簡單之模糊推論法,以 一個雙輸入單輸出之模糊系統,說明兩個規則同時存在時其推論之處理步驟。 前提一: if x1 is X11 and x2 is X21 then u is U1 (15) 前提一: if x2 is X12 and x2 is X22 then u is U2 模糊控制器之輸入不是模糊的,而是明確的數值。其推論過程如圖27 所示, 可分成下列三個步驟:
(1)首先對IF部分(Condition part)各條件(xi is Xij)根據已知的輸入值
x1、x2,計算各法則前鑑部之歸屬函數值ri,也就是對各輸入變數所對應的模
(2)然後對ri及then部分(action part)的輸出(u is Ui)模糊集合取邏輯積 (min),作為各法則的結合程度值而得到其對應之推論結果Ui,此即為最簡單 之切頭法,如圖24。 (3) 最後對整個規則群取模糊邏輯和(max),綜合各法則之推論結果Ui,計算 出 整 體 之 推 論 結 果 。 以 上 是 推 論 過 程 中 最 為 常 見 的 一 種 方 法 , 稱 之 為 min-min-max 另外一種推論方式和上述之作法大致相同,但步驟(b)中的邏輯 積改成代數(algebraic product),如圖 25,與前者相比會有較平滑之推論結果, 我們稱此法為min-product-max。 圖24min-min-max 圖25min-product-max
4.4 解模糊化介面
解模糊化便是將推論所得的模糊結果,轉化為一明確的輸出值,以便對受控
體進行控制。其中幾種常見的方法有中心面積法(Center of area)、最大歸屬度
法(Maximum member ship value)、重心解模糊化法(Center of gravity)、高度 法(Height method)…等 重心解模糊化法
∫
∫
= dy y u dy y yu y B B ) ( ) ( * (16) 高度法 ) ( * * i Aij J i i i X w w y w y = =∧µ∑
∑
(17) i 為控制規則編號,j 為輸入變數編號 中心面積法∫
∑
∑
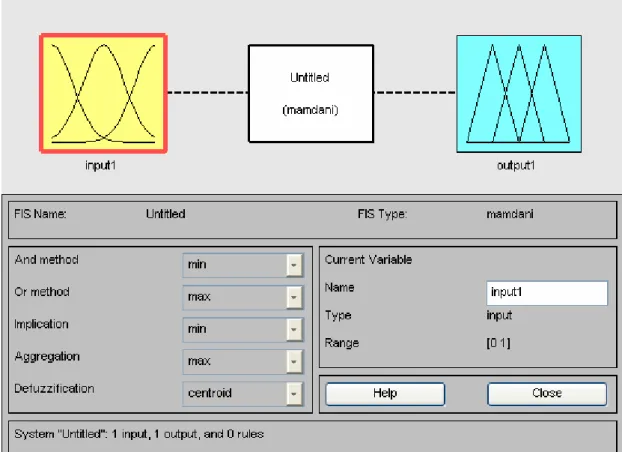
= = w X dy A y A y i Aij J i i i ) ( * * µ (18) Ai為第i條規則推論結果所圍成的面積 綜合以上所述模糊控制其設計步驟如下: (1) 定義輸入及輸出變數 首先,要先決定受控系統有那些操作狀況是必須被觀察、量測的。另外,考慮 那些輸出動作是必須被控制的。 (2) 定義各變數模糊化的條件 按實際狀況考慮輸出入變數的量測及操作範圍,以便決定出每個變數的論域 (universe of discourse)(此論域為一全集合,全集合的元素即變數的操作範 圍,利用這個全集合可以定義出許多模糊集合)。然後,安排每個變數的語言表 示事項及相對應的歸屬函數。(3)設計控制規則與模糊推論 通常可由操作人員的經驗和專家的知識,轉化成語言式的控制規則。 (4)選擇解模糊化的方法 把推論完成的模糊輸出量轉化成實際的明確值這項工作稱為解模糊化,解模 糊化的方法很多,而每個方法各有其優劣性,應針對不同的環境加以選用。 以上若應用模糊控制理論在空調溫度控制上,可將空調空間室內的空氣狀態 調節到較省能之工作溫度設定曲線上,達到兼具省能及穩定的要求。 5. 利用 Matlab 模擬基地台的空調控制器 為了節省實際製作模糊控制器的時間,所以在實作控制器之前,先利用功能強
大的電腦軟體Matlab,進行預先的電腦模擬,下圖為 Matlab Fuzzy Tools Box
的示意圖(如圖 26),詳細操作功能可參考 Matlab 的說明檔。
5.1 基地台控制程式運算流程 由本章一開始所推導的系統模型可知,若只考慮外界陽光溫度的傳導作用 以及機房本身設備溫度的對流作用,可推導其數學模型如(19) 至(21)式,基 地台的系統方塊圖在Matlab 裡可模擬如圖 27,全系統的的運作方式可模擬如 圖 28 及圖 29,其中在圖 29 中Fuzzy控制模組,是由Matlb軟體裡的Toolbox 產 生( 參 考 圖 26) , 所 使 用 的 模 糊 化 參 數 為 梯 型 歸 屬 函 數 , 推 論 法 為 min-min-max , 解 模 糊 化 的 參 數 為 重 心 解 模 糊 化 法 。 由 於 基 地 台 大 小 為 405O(L)xl800(w)x2520(H)mm3,牆壁厚度6cm,所以傳導面積可由此計算(共 五面,東南西北及上方),而其熱傳導係數k為O.0208(W/mk)空氣的熱對流係數 考慮風扇作用所以取 30(w/km2,另外空氣的密度為 1.176kg/ m3,比容為 1.0047kJ/(kg.K),而溫度變數來源,考慮外界陽光分為五個方向照在基地台 上,東南西北及上方,一般來說溫度變化介於 22~35℃,所以外界的溫度變數 以 5 個相異的高斯分佈來模擬(roof,north,south,east,west)如圖 30,將其 視為外界輸入溫度的變數,另外由於室內通訊設備的發熱也是導致基地台內溫度 上昇另一變數,由實際機台估測通訊設備上的接觸面積約為2.52 m2,將其散熱 所產生的溫度變化,由一簡諧函數模擬,模擬中心溫度由 30 及 35℃,振幅為 10℃當作導致基地台溫度上昇的另一變數,所模擬後的圖形如圖 31、圖 32、圖 33。 程式的運算程序可簡述如下,首先將外界所模擬的工作溫度,及機台本身模 擬所產生的溫度輸入Matlab 內的模擬程式,由於溫度的上升,導致控制器啟動 空調系統,將熱量帶走,而使溫度下降,空調系統啟動的時間可對比電力的消耗, 並經由能量的計算可得電力費用,如此運算一天的時問,可得一個循環。 圖31是模擬目前遠傳空調系統的模擬圖,輸入變數為外界溫度及機台溫度 在30℃時,空調系統運轉時間的模擬圖,考慮加裝Fuzzy Control(模糊化參數 為梯型歸屬函數,推論法為min-min-max,解模糊化的參數為重心解模糊法),
在外界輸入溫度及機台溫度在30℃時對空調系統運轉時間所做的模擬可得圖 32,而圖33為輸入外界溫度及機台在溫度35℃時有加裝Fuzzy Control的模擬 圖,在圖34中變化機器設備在溫度30℃及35℃時考慮有空調控制時可清楚看出 兩者之差異。在本計畫中,我們也做了空調系統所產生的電力負荷以及電費消耗 的比較情形,其中在電力消耗費用計算中,考慮一度電為2.78元,在圖35中為 目前遠傳空調系統在設備溫度30℃時所產生之電力消耗情形,而圖36為有加裝
Fuzzy Control的情形,圖37為目前空調系統與加裝Fuzzy Control在電費上的 比較圖。 為了更確實的獲得輸入變數的量測值,本計畫中並且實地依照圖五在基地台 安裝溫度感測器,如圖38 即是 12/14 實地量得基地台室外屋頂的溫度、屋內通 訊設備的溫度及基地台室內中央的溫度,而圖39 為 12/14 將此原始資料(基地 台室外屋頂的溫度、屋內通訊設備的溫度)代入之前的模擬程式所得到基地台室 內中央的模擬溫度及原始基地台室內中央的量測溫度比較圖,由此可看出此模擬 程式的正確性。經由觀察可得知,由於目前的基地台的熱傳導係數很低,因此把 外在溫度效應都隔絕於屋外,使天熱時,外界高溫不易影響基地台內部溫度,不 過也使天冷時無法利用外界低溫進入基地台內來降溫,造成能源的浪費,因此本 計畫提出,更改基地台的屋頂設計(如圖47),使得在天熱時,能利用目前的設 計,有效阻隔外界高溫,但在天冷時能夠自動改變屋頂的設計,切換到具有高熱 傳導係數的材質,如不鏽鋼(熱傳導係數20W/(MK)),使室內高溫能由此將熱 傳導到室外,而圖40 為變化熱傳導係數之後,兩者的室內溫度及功率比較的模 擬圖,其餘圖41 至圖 46 則為不同日期,所量測及所模擬的比較圖,最後將所 得的數據統計,列於表1~表 7。 為了計算改變熱傳導係數,所能達到之效益, 可由中央氣象局調查在 2005 年每日平均溫度所得之統計(表8),而表 9 為 15℃~20℃平均溫度所得之天數 統計及其預估之功率比較。
以下為基地台本身之數學模型及方塊圖 300 ~ 30 25 ~ 5 ), m W ( : h ),0.0208 mK W ( t coefficien Conduction : K ) ( : m) thickness( : ) ( : 1 : 1 2 r 2 or K t coefficien convection m Area contact A L K T T T convection for A h R G conduction for L A k R G R T q low hig r t H t K t − = ∆ × = = × = = ∆ =
∑
∑
∑
(19) (20) (21) 圖27 基地台本身之溫度方塊圖(matlab)圖28 全系統方塊圖(without fuzzy control)
Fuzzy control
6. 基地台空調系統模擬結果 0 1 2 3 4 5 6 7 8 9 x 104 20 22 24 26 28 30 32 34 36 time(second) te m per at ur e c ° temperature v.s. time roof north,south east west 圖30 為系統未加空調之溫度表示圖(模擬圖) 0 1 2 3 4 5 6 7 8 9 x 104 20 22 24 26 28 30 32 34 36 time(second) te m per at ur e c °
temperature with machine 30 c° v.s. time indoor temp roof north,south east west machine 圖31 為目前空調系統所產生之溫度控制圖(模擬圖)
0 1 2 3 4 5 6 7 8 9 x 104 24 26 28 30 32 34 36 time(second) te m per at ur e c °
temperature with machine 30 c° with fuzzy v.s. time
indoor temp machine 圖32 為加裝fuzzy控制器配合捷萌公司監控系統的情形(模擬圖) 0 1 2 3 4 5 6 7 8 9 x 104 24 26 28 30 32 34 36 38 40 time(second) te m per at ur e c °
temperature with machine 35 c° with fuzzy v.s. time
indoor temp machine
0 1 2 3 4 5 6 7 8 9 x 104 0 10 20 30 time(second) te m p an d po w er on
temp and power on (different machine temp with fuzzy) v.s. time
0 1 2 3 4 5 6 7 8 9 x 104 0 10 20 30 time(second) te m p an d po w er on
indoor temp with machine 30 c°
power on with machine 30 c°
indoor temp with machine 35 c°
power on with machine 35 c°
圖34 為室內溫度及空調啟動在機器設備溫度30℃及35℃有空調控制之比較情 形(模擬圖) 0 1 2 3 4 5 6 7 8 9 x 104 0 1 2 3 4 5 6 7 8 time(second) co st an d po w er o n
cost and power on v.s. time
cost (NT) power on
0 1 2 3 4 5 6 7 8 9 x 104 0 1 2 3 4 5 6 7 8 time(second) co st an d po w er o n
cost and power on with fuzzy v.s. time
cost (NT) power on 圖36 為加裝fuzzy控制器配合捷萌公司監控系統電力負荷及費用的情形(模擬 圖) 0 1 2 3 4 5 6 7 8 9 x 104 0 1 2 3 4 5 6 7 8 time(second) co st
cost v.s. time (machine temp 30 c°)
cost
cost with fuzzy
0 5 10 15 20 25 8 10 12 14 16 18 20 22 24 26 28 original temperature 12/ 14 hour te m pe rat ur e outdoortemp mechinetemp indoortemp 圖38 12/14量測戶外溫度,機器內部溫度,室內中心溫度 0 5 10 15 20 25 22 24
26 original temp v.s. simulation temp 12/14
indoortemp 0 5 10 15 20 25 20 25 30 hour te m per at ur e simulation 0 5 10 15 20 25 0 5x 10 4 hour po w er
original power v.s. simulation power
measure power simulation power
0 5 10 15 20 25 0 10 20 30 hour in do or t em pera ture
unchange conduction temperature v.s. change conduction(0.0208 -> 20) temperature 12/14
0 5 10 15 20 25 0 2 4 6x 10 4 hour po w er
unchange conduction power v.s. change conduction power 12/14
unchange conduction change conduction 圖40 12/14改變熱傳導係數、量測戶外溫度與模擬之室內溫度,兩者比較之模 擬功率 0 5 10 15 20 25 10 12 14 16 18 20 22 24 26 28 original temperature 12/ 16 hour te m per at ur e outdoortemp mechinetemp indoortemp 圖41 12/16量測戶外溫度、機器內部溫度、室內中心溫度
0 5 10 15 20 25 22
24
26 original temp v.s. simulation temp 12/16
indoortemp 0 5 10 15 20 25 20 25 30 hour te m per at ur e simulation 0 5 10 15 20 25 0 5 10x 10 4 hour po w er
original power v.s. simulation power
measure power simulation power 圖42 12/16量測戶外溫度、模擬之室內溫度(修正模型)、量測與模擬的功率 0 5 10 15 20 25 10 15 20 25 30 hour in do or t em pera ture
unchange conduction temperature v.s. change conduction(0.0208 -> 20) temperature 12/16
0 5 10 15 20 25 0 2 4 6x 10 4 hour po w er
unchange conduction power v.s. change conduction power 12/16
unchange conduction change conduction
圖43 12/16改變熱傳導係數、量測戶外溫度與模擬之室內溫度、兩者比較之模 擬功率
0 5 10 15 20 25 5 10 15 20 25 30 35 40 45 original temperature 12/ 21 hour te m per at ur e outdoortemp mechinetemp indoortemp 圖44 12/21量測戶外溫度、機器內部溫度、室內中心溫度 0 5 10 15 20 25 22 24
26 original temp v.s. simulation temp 12/21 indoortemp
0 5 10 15 20 25 20 25 30 hour te m perat ur e simulation 0 5 10 15 20 25 0 5 10x 10 4 hour pow er
original power v.s. simulation power measure power simulation power
0 5 10 15 20 25 0 10 20 30 hour in do or t em per at ur e
unchange conduction temperature v.s. change conduction(0.0208 -> 20) temperature 12/21
0 5 10 15 20 25 0 2 4 6x 10 4 hour po w er
unchange conduction power v.s. change conduction power 12/21 unchange conduction
change conduction
圖46 12/21改變熱傳導係數、量測戶外溫度與模擬之室內溫度、兩者比較之模 擬功率
日期 2/14 2/15 2/16 2/17 2/18 2/19 2/20 2/21 戶外平 均溫度 13.438 14.975 14.406 14.449 17.899 12.05 15.813 17.842 溫度低 於15度 時間比 例 0.67 0.53 0.66 0.66 0.20 0.81 0.58 0.33 溫度低 於16度 時間比 例 0.74 0.62 0.73 0.72 0.33 0.84 0.6 0.34 溫度低 於17度 時間比 例 0.79 0.66 0.75 0.75 0.4 0.85 0.61 0.34 溫度低 於18度 時間比 例 0.86 0.75 0.76 0.8 0.6 0.88 0.67 0.34 溫度低 於19度 時間比 例 0.93 0.82 0.83 0.9 0.68 0.9 0.71 0.43 溫度低 於20 度時間 比例 0.96 0.86 0.99 0.98 0.79 0.9 0.77 0.67 表1 戶外溫度資料
日期 2/14 2/15 2/16 2/17 2/18 2/19 2/20 2/21 原始 設計 (功 率) 49865 49865 52204 49865 50125 49865 51944 48826 更改 設計 (熱 傳導 係數) 16609 20506 19207 15569 33237 9333.7 22844 33757 原始 設計 與更 改設 計之 功率 比例 0.333 0.411 0.367 0.312 0.663 0.187 0.439 0.691 表2設定溫度15℃更改設計與未更改前,功率比較表 日期 2/14 2/15 2/16 2/17 2/18 2/19 2/20 2/21 原始設 計(功 率) 49865 49865 52204 49865 50125 49865 51944 48826 更改設 計 (熱傳 導係 數) 12971 19726 16609 12711 32717 8814 22325 33757 原始設 計與更 改設計 之功率 比例 0.26 0.4 0.32 0.25 0.65 0.18 0.43 0.69 表3 設定溫度16℃更改設計與未更改前,功率比較表
日期 2/14 2/15 2/16 2/17 2/18 2/19 2/20 2/21 原始設 計(功 率) 49865 49865 52204 49865 50125 49865 51944 48826 更改設 計 (熱傳 導係 數) 6735 15569 15569 10113 21805 6216 19207 33757 原始設 計與更 改設計 之功率 比例 0.14 0.31 0.3 0.2 0.43 0.12 0.37 0.69 表4 設定溫度17℃更改設計與未更改前,功率比較表 日期 2/14 2/15 2/16 2/17 2/18 2/19 2/20 2/21 原始 設計 (功 率) 49865 49865 52204 49865 50125 49865 51944 48826 更改 設計 (熱 傳導 係數) 5696 10893 12711 7774.8 20246 6475 18167 32717 原始 設計 與更 改設 計之 功率 比例 0.11 0.21 0.24 0.16 0.4 0.13 0.35 0.67 表5 設定溫度18℃更改設計與未更改前,功率比較表
日期 2/14 2/15 2/16 2/17 2/18 2/19 2/20 2/21 原始設 計(功 率) 49865 49865 52204 49865 50125 49865 51944 48826 更改設 計 (熱傳 導係 數) 4657 8294 4137 4137 11672 6216 14530 18687 原始設 計與更 改設計 之功率 比例 0.09 0.17 0.08 0.08 0.23 0.12 0.28 0.38 表6 設定溫度19℃更改設計與未更改前,功率比較表 日期 2/14 2/15 2/16 2/17 2/18 2/19 2/20 2/21 原始設 計(功 率) 49865 49865 52204 49865 50125 49865 51944 48826 更改設 計 (熱傳 導係 數) 4137 7255 4137 4137 10373 6216 14010 17648 原始設 計與更 改設計 之功率 比例 0.08 0.15 0.08 0.08 0.20 0.12 0.27 0.36 表7 設定溫度20℃更改設計與未更改前,功率比較表
200年日 平均氣溫 20 度以 下 19度 以下 18度 以下 17度 以下 16度 以下 15度 以下 天數 122 105 91 81 60 45 佔全年天 數比例 0.34 0.29 0.25 0.22 0.16 0.12 變化熱傳 導係數預 估佔全年 消耗功率 之比例 0.6 0.7 0.7 0.8 0.8 0.9 表9日氣溫平均天數 不鏽鋼屋頂 原始設計屋頂 馬 達 基地台 圖47更改屋頂設計(熱傳導係數更改)
北方
樓
梯
間
交 換 機 交 換 機機房
圖48依靠西面的樓梯間,可避免西曬北方
樓
梯
間
交 換 機 交 換 機機房
圖49 依靠東面的樓梯間,可避免上午陽光直射北方
廣告
看板
交 換 機 交 換 機機房
圖50 利用廣告看板當遮蔽物五、結果與討論
1. 由圖31、圖32及圖37比較可知,因為需配合捷萌監控器的作用,只能採取relay 的功能加上無法更改冷氣設定安全的溫度(彈性的安全空問),因此導致fuzzy控 制器變成只有定時控制的功能,無法發揮省能的功用。 2. 由圖33及圖34可知,當通訊設備溫度達到35℃以上時,空調系統就必須全力 運轉,此時加裝任何控制器都無省能之作用。 3. 圖38、圖41、圖44為真實量測基地台室內的溫度,機器內部的溫度及外界溫 度,圖39、圖42、圖45為室內溫度與模擬溫度(修正模型)的比較圖及兩者功 率的比較圖,由以上可知,由於基地台本身結構的熱傳導係數很低(0.0208), 使得外界溫度對室內溫度幾乎沒有影響(由模擬結果圖,也可得到近似的結果, 表示模擬系統的正確性),而取決於內部的機房溫度,並使得冷氣一直維持在運 轉的狀態,雖然可以在熱天時有效隔絕熱氣的進入,但在溫度低時,也無法使外 氣進入,浪費可利用的資源。 4. 圖40、圖43、圖46表示模擬將機房屋頂做一切換裝置(圖47),在外氣低 溫時(例如低於攝氏15度)可以藉由馬達的帶動,將屋頂改為較易傳導熱量的不 鏽鋼(熱傳導係數20W/(MK)),由圖中可明顯看出,改變熱傳導係數之設計能 夠有效節省冷氣的功率,表1為戶外之氣溫資料,而表2至表7為變化設定溫度從 20℃~15℃之更改裝置與未更改裝置之功率比,由此看出,節省的功率,幾乎 與外界溫度的切換成一比例關係,當外界溫度越低,設定的溫度越高,所耗費的 功率越低,但此設定還需考慮原本基地台內部安全溫度的設定,因此在此將設定 溫度設定於15℃~20℃。5. 由討論4,利用外界溫度的降溫能力,確實可有效節省冷氣的功率,因此根據 中央氣象局的資料(表8),在2005年中,日平均溫度在20℃至15℃以下的天
數比例如表4,當設定溫度於20℃時,所需的電費只有原本電費的6成,不過在
此尚未考慮由於更改基地台設計,所需耗費的成本以及平時在切換時所消耗的電 費,不過以長遠效率來看,相信仍可有效節省能源。
六、結論
空調節能在基地台的能源調配上,確實是一個值得重視的問題, 經由本計 畫之討論可得知,由於目前基地台本身材質的影響,使得通訊設備本身的溫度才 是影響基地台內溫度上昇的主要原因,另一方面也因為受限於基地台本身冷氣空 調無法更改參數的影響,使得模糊控制無法得到預期的效果,但這也引發我們尋 找其他解決問題的想法,以下為我們提出之建議。 1. 藉由改變屋頂熱傳導係數,利用戶外冷空氣來降低屋內溫度的想法,已經在 之前的討論上得到證實,但美中不足的是,在本計畫中無法將此想法實現,因此 也就沒有將實驗的結果與理論作一比較,希望日後相關的研究,能將此方法實現 到真實系統上。 2. 利用直接引進外界冷空氣的方法,也是一個值的思考的方式,但此方法由於 牽涉到設備本身對於防塵的影響,因此還需有其他的配套措施,例如在進氣口加 裝防塵罩等。 3.目 前遠傳的空調控制是採取定時控制的方式,因此無法達到因應外界因素改 變之主動控制的功能,因此在未來空調機台的採購上,可考慮採購加裝主動控制 器的機台。 4. 在冷氣裝置的方位調配上,可知盡量使東、西曬面積越小越好,使機房的溫 度不要因為熱傳導的溫度效應而上昇,因此最好將基地台的短邊,朝向東西邊。 5.如果說在頂樓上有設置樓梯間,或是剛好有廣告看板的話,可依照屋頂上的配 置地形加以遮蔽陽光,使空調系統能有較好的效能,如圖48、圖49、圖50。6. 由實驗經驗可知,空調系統在外氣溫度較低時,空調的效率能有較好表現,
因此建議使運轉中的交換機能夠在避免陽光直射下運轉(早上西面交換機運轉,
下午東面交換機運轉),會有較高的效率。
7. 另外,因為機房內的冷氣過常會保持運轉的情形,所以利用頻率運轉方式的
參考文獻
[l]陳銘章,"冷凍工程",長諾資訊圖書公司,l997。
[2]光堡冷凍空調技術綱,"www.hvacr.com.tw/index-htm"
[3]Althous、Turnqllist、Bracciano'"Modern Refrigeration and Air Codi tioning",GOODHEART WILLCOX。
[4]王吉一'"節能之冷卻水塔研究",國立交通大學產業安全與防災學程碩
士論文,2002。
[5]Zadeh,L.A.'"Fuzzy sets,,,Information and Control ,1965。
[6]孫、宗瀛、楊英魁,"Fuzzy控制理論、實作與應用",全華科技圖書股份有 限公司,2001。 [7]楊克勤,"設計直流馬達轉速遠端模糊監控系統",因立海洋大學機械與 輪機工程學系碩士論文,2000。 [8]張得隆、洪兆慶,"FUzzy產品基礎與實例",全華科技圖書股份有限公司, 1995。
[9]C.C.Lee '"Fuzzy Logic in Control System :Fuzzy Logic Control ler Part I,I I",IEEE Trans.Syst.Man ,l990。
[lO]R.M.Tong.'"A retrospective view of fuzzy controlsystem",FSS14, l984。
[l l]王文俊,"認識FUzzy",全華科技圖書股份有限公司,1994。
[12].G.M.AbdeinOUIUC.H.Chang,F.H.HIlang,and J.Y.chellng,“Design ofa Fuzzy Controller Using Input and Output Mapping FF‘acdtOω1r.Vs on Systems,Man,and Cybernetic,Vol-21,No.5,pp.952.960,1991.
[13].Y.Tang and L.Xl1,“Fuzzy Logic Application for Intelligent Control of a Variable Speed Drive",IEEE Transactions on Energ Conversion,Vol-9,N0.4, pp.679.685,1994.
[14].H.X.Li and H.B.Gatland,“Conventional Fuzzy Control and Its
Enhancement",IEEE Transactions on 秒stems,Man,and CJVbemetic-Port B,Vol-26,No.5,pp.791.797,1996.
[15].Y.K.CheIL C.H.Yang and Y.C.WI1,“Robust Fuzzy Controlled Photovoltaic
Power Inverter with Taguchi Method",IEEE Transactions on Aerospace and
Electronic Systems,Vol-38,No.3,pp.940.954,2002.
[16].L JiI1,P.N.Nikiforuk and M.M.Gupta,“Direct adaptive output tracking controlusing multilayered neural networks",IEE
PP-393.398,1993.
[17].W.H.Schiffmann and H.W.Geffers,“Adaptive control ofdynamic systems by back propagation networks",Neural
Networks,Vol-6,pp.517.524,1993.
[18].E.S.Plumer,“Optimal control ofterminal processes using neural networks",IEEE Transactions on Neural
Networks,Vol-7,no.2.pp408418,1996 [19].H.D.Patino and D.Liu,“Neural network-based model reference adaptive
controlsySten1",IEEE Transactions on Systems,Adfanpand Cybernetic-Part B..Cybernetics,Vo1.30,No.1,pp.198.204,2000.
[20].W.D.chang,R.C.Hwang and J.G.Hsiel1,“The studies ofadaptive control byauto-tuning neural network",Proceedings qfSCI'"-182.187,2000.
[21].D.Ddarkov,H.Hellendoorn and M.Remftank,An Introduction to Fuzzy Control,Berlin:Springer-Verlag,1993.
[22].C.T.Lin and C.S.G.Lee,Neural Fuzzy Systems,Upper Saddle River,N.J.: Prentice Hall,1996.
[23].N.K.kasabov,Foundations ofNeural Networks,Fuzzy Systems,and Knowledge Engineering,Cambridge,Mass-:M汀,1996.
[24].L.X.Wang,A Course in Fuzzy Systems &Control,Upper Saddle River,NJ.:
Prentice Hall,1997.
[25].H.T.Nguyen and E A walker,A First Course in Fuzy Logic,Boca Raton: CRC Press,1997.
[26].J.S.R.Jang,“ANFIS:Adaptive-network-based alzzy inference
systems",IEEETransactions on 砂stems,Man,and Cybernetic, Vol-23,No.3 [27].J.S.R.Jang,C.T.SUIL and E Mizutani,Neuro Fuzzy And Son Computing, 1997.
[28].郭全賢,“一新型模糊近似PD控制器之設計",私立義守大學電機工程研究 所碩士論文,2003.
[29]龔棋哲,“進階式模糊控制器研究",私立義守大學電機工程研究所碩士論 文,2003.
[30]T.T.Hllang,H.Y.Chung,J.J.Lin,“A Fuzzy PID Controller Being Like ParameterVarying PID",IEEE International Fuzzy Systems COMbeence Proceedings,Vol-1,pp.269~276,Aug.1999.
[31]V.Pavlica and D.Petrovacki,“An Application ofPID-Fuzzy Hybrid Controller",IEEE International COFOb-mce on
ControlApplication,Vol-1,PP-629.632,1998.
Plants",2002First International IEEE秒mposim“Intelligent 秒 stems-",Vol-1,PP-30.35,2002.
[33].J.S.JangE“SelfLlearning alzzy controllers based on temporal back propagation",IEEE Transactions Neural Networks,Vol-3,pp.714.724,1992. [34].H.Bersini,1.P.Nordvik and A.Bonari剖,“A simple direct adaptive
alzzycontrollerderived from its neural equivalent",IEEE International C0fbence on FmqSystem,Vo1.1,pp.345.350,1993.
[35].C.T.Lin,C.J.Lin,and C.S.Lee,“Fuzzy Adaptive Learning Control Networkwith on-line Neural Learning",FUZZY
Sets-andSystems,Vol-71,pp.25.45,1995.
[36].Z.Li,D.Xiao and S.He,“A RIZzy adaptive PID controller based on neural networks弋Control and Decision,Vol-8,No.3,pp.340.345,May 1996.(in Chinese)
[37].L Shaoyuan and X.Yugeng,“A alzzy-neural network for adaptive control of nonlinear dynamic systems",IEEE International FtdZ砂Systems Cor份 rence Proceedings,Vol-1,pp.449.453,1999.
[38].J.kim and N.Kasabov,“HyFIS:adaptive neuro-hzzy inference systems and their application to nonlinear dynamical systems戶,Neural
Networks,Vol-12, pp.1301.1319,1999.

![圖 10 二位置控制之溫度變化與控制動作[4] 2. 比例控制 : 比例控制(proportional control)又稱 p 控制(如圖 11),乃根據目標值 與量測值之偏差比例而動作故稱為比例控制。其精準度較二位置控制為高,其特 徵為儘管在有變動的負載下依舊可以得到穩定的控制,由於此特徵,故主要用於 精度要求不是很高之一般場所如辦公室等之室溫控制。 e Y(s) 圖 11 比例控制 3](https://thumb-ap.123doks.com/thumbv2/9libinfo/8853281.243151/16.892.146.605.118.370/目標值例控制其精準度較置控制為高其徵為之一般場所如辦公室等之.webp)

![圖 18 以模糊集合的特徵函數來描述氣溫低溫的概念 一個在論域 χ 中的 Fuzzy 集合 A ~ ,可以使用在「 1,0」區間取值的歸屬函數 A ~µ 來描述其特性。即歸屬函數可表示如(7)式閉區間的對應。 10 ]1,0[:~~≤≤→ AAµχµ (7) 而 fuzzy A~ 集合,可以使用(8)式表示。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8853281.243151/23.892.264.605.114.363/糊集合一個在~來描述其特性即歸屬函數可表示閉區間對應~~.webp)