國立高雄大學電機工程學系研究所
碩士論文
光纖陀螺儀應用於 3D 地圖資訊之整合研究
研究生:劉立德撰
指導教授:施明昌 博士
中華民國一零七年七月
iii
光纖陀螺儀應用於 3D 地圖資訊之整合研究
指導教授:施明昌 博士(教授) 國立高雄大學電機工程系 學生:劉立德 國立高雄大學電機工程系 摘要 現行的電子地圖,不管是汽車導航或是 Google Map,大部分都只是 2D 地圖的資料, 但是並不能提供到道路的高低落差。也就是說在地圖上,不管是在高架橋或是在平地上, 所看到的地圖是相同的。本論文主要探討利用光纖陀螺儀的角速度測量,配合車速的實 際行駛路況來計算路面的高低落差以圖供路面完整 3D 的資訊,本實驗使用六軸運動平 台來模擬路況,由光纖陀螺儀的角速度及車速的參數取得路面高低起伏資訊,誤差在 3 公分之內,並期望未來可以使用更佳精確,且方便的方式應用在 3D 的地圖繪製上。 關鍵字:光纖陀螺儀、3D 地圖、路面高低、角速度、電子地圖、六軸運動平台iv
Application of fiber optic gyroscope to 3D map
information integration
Advisor(s): Dr. Ming Chang, Shih Department of Electrical Engineering
National University of Kaohsiung
Student: Li De,Liu
Department of Electrical Engineering National University of Kaohsiung
Abstract
The current electronic map, whether it is car navigation or Google Map, is mostly only 2D map data, and it does not provide an z-dimension; the altitudes information of the road. Therefore it is necessary to develop a 3D map of which altitudes on the map for modernize traffic navigation. The objective of this thesis is to develop a 3D traffic map by applying optical fiber gyroscope to scan the altitudes on the driving road. The data of angular velocity of the fiber optic gyroscope and the driving velocity of the vehicle are used to calculate the real time altitudes variation of the traffic road. A six-axis motion platform; steward system is used to simulate the 3D traffic condition, and to verify the accuracy of the altitudes scanning by this system. It is showed that accuracy of altitudes within 3 cm can be achieve by this system.
Keywords: Fiber optic gyroscope, 3D map, road height, angular velocity, six-axis motion platform
v
致謝
首先誠摯的感謝指導教授施明昌老師悉心的指導與栽培,不時的討論並指點我往正 確的方向前進,以及健康上給予叮嚀,引導我對未來的日子譜畫出不同以往的願景,拓 展了我的視野,給我充足的學習機會與優質的研究環境,使我在這兩年中獲益匪淺,老 師們對學問的嚴謹是我的學習典範。 再者,也感謝高雄大學-藍文厚老師,與國立師範大學-李孟恩老師逾百忙之中撥空 擔任學生的口試委員,對本論文不吝指正並提供許多見解。本論文得以完成另外感謝學 長-楊心榮,李定承以及張睿詠大力協助,因為有你們的體諒與幫忙,使得本論文能夠 更完整而嚴謹。兩年的日子裡,日月光及研究室就像一個家,生活的點滴、學術上的討 論、趕報告的革命情感等,在這裡所結識的伙伴都是幫助我成長的重要人物,不厭其煩 地指出我研究上的缺失與經驗的傳承,並且能在我迷惘時解惑,實驗得以完成,對於學 長們的敬意與感謝永留於心,莫敢忘懷。 最後,我要感謝我的家人為我提供溫暖的家,讓我可以安定慌亂的情緒和忙碌的工 作,並心無旁鶩的完成學業,在此將這份喜悅與光榮獻給我摯愛的雙親。vi
目錄
致謝... v 目錄... vi 圖目錄... viii 表目錄... xi 第一章 研究動機... 12 1.1 前言... 12 第二章 光纖陀螺儀的原理... 14 2.1 陀螺儀概述及原理... 14 2.2 陀螺儀性能分類... 18 第三章 實驗架構... 20 3.1 實驗架構... 20 3.1.1 電源供應器... 21 3.1.2 光纖陀螺儀... 21 3.1.3 六軸運動平台... 21 3.1.4 RS-232 訊號讀取 ... 23 3.2 六軸平台的程式控制... 25 3.2.1 陀螺儀角速度信號的讀取... 26 3.3 利用光纖陀螺儀角速度轉換成高度的計算... 27 3.4 六軸運動平台控制與道路狀況模擬... 34 第四章 結果與討論... 38 4.1 效果驗證... 38 4.2 未來展望... 41 參考文獻... 42vii
附錄一... 43 附錄二... 45 附錄三... 46
viii
圖目錄
圖 1.1-1 Google Map 示意圖 ... 12 圖 1.1-2 Google Map 路線導航 ... 13 圖 2.1-1 陀螺儀示意圖 ... 14 圖 2.1-2 自轉軸偏離的陀螺[5]... 15 圖 3.2.1-2 桑納克效應示意圖 ... 16 圖 3.2.1-3 順時針方向光訊號路徑圖 ... 17 圖 3.2.1-4 順時針方向光訊號路徑圖 ... 17 圖 2.2-1 雷射陀螺儀[9]... 18 圖 2.2-2 高精度光纖陀螺儀[10]... 18 圖 2.2-3MEMS 陀螺儀[8] ... 19 圖 3.1-1 光纖陀螺儀模擬系統示意圖 ... 20 圖 3.1.3-1 沿 X 軸前後移動 ... 22 圖 3.1.3-2 沿 X 軸翻滾 ... 22 圖 3.1.3-3 沿 Y 軸左右移動 ... 22 圖 3.1.3-4 沿 Y 軸上下俯仰 ... 22 圖 3.1.3-5 沿 Z 軸上下移動 ... 22 圖 3.1.3-6 沿 Z 軸左右旋轉 ... 22 圖 3.1.4-1 電源供應器 ... 23 圖 3.1.4-2 KVH 光纖陀螺儀... 23 圖 3.1.4-3 六軸運動平台 ... 24 圖 3.1.4-4 KVH 光纖陀螺儀 15pin 轉 RS-232 轉接器 ... 24 圖 3.1.4-5 RS-232 轉 USB 轉接頭 ... 24 圖 3.1.4-6 光纖陀螺儀連接電路圖 ... 24ix 圖 3.2-1 六軸運動平台控制介面 ... 25 圖 3.2.1-1 LabView 開發介面 ... 26 圖 3.3-1 角速度示意圖[13]... 27 圖 3.3-2 速度與角速度與高度關係圖 ... 29 圖 3.3-4 平台靜止時,陀螺儀信號輸出圖 ... 29 圖 3.3-5 平台靜止時,車行路面高度圖 ... 30 圖 3.3-6 振幅 15 度,週期 2 秒角速度波形圖ω(t)... 30 圖 3.3-7 振幅 15 度,週期 2 秒高度關係圖h(t) ... 31 圖 3.3-8 振幅 15 度,週期 4 秒角速度波形圖ω(t)... 32 圖 3.3-9 振幅 15 度,週期 4 秒高度關係圖h(t) ... 32 圖 3.3-10 振幅 20 度,週期 2 秒角速度波形圖ω(t)... 33 圖 3.3-11 振幅 20 度,週期 2 秒高度關係圖h(t) ... 33 圖 3.4-1 六軸平台動感運動曲線編輯介面 ... 34 圖 3.4-2 實驗 01 路況角速度模擬圖 ... 34 圖 3.4-3 實驗 01 路況角速度輸出圖 ... 35 圖 3.4-4 實驗 02 路況角速度模擬圖 ... 35 圖 3.4-5 實驗 02 路況角速度輸出圖 ... 36 圖 3.4-6 模擬道路角速度變化圖 ... 36 圖 3.4-7 陀螺儀角速度所量測結果 ... 37 圖 3.4-8 高度換算的變化圖 ... 37 圖 4.1-1 Google Map 平面道路圖 ... 38 圖 4.1-2 平面道路角速度圖 ... 39 圖 4.1-3 平面道路高度圖 ... 39 圖 4.1-4 Google Map 高架橋道路圖 ... 39 圖 4.1-5 高架橋道路角速度圖 ... 40
x
xi
表目錄
表 2.2-1 光學式陀螺儀分類與性能介紹 ... 18
表 4.2-1 KVH 光纖陀螺儀規範... 43
表 4.2-1 KVH 光纖陀螺儀 Electrical Interface(Digital Output) ... 45
表 4.2-1 KVH 光纖陀螺儀 Data Format ... 46
12
第一章 研究動機
1.1 前言
自從 1852 年法國科學家傅科 (J.B.L. Foucault) 製作了第一套陀螺儀。陀螺儀 (Gyroscope)可測量地球的自轉[1],成為軍事、航太與導航之關鍵技術。機械式陀 螺儀的性能介紹之後,陀螺儀技術不斷改良,1976 年美國猶他大學的 V.Vali 和 R.W.Shorthill 製造出第一個光纖陀螺儀(Fiber Optic Gyroscope)[2]。光纖陀螺儀是 利用桑納克效應(Sagnac Effect),當感測環受到角速度變化時,使得光纖陀螺儀中 兩道光束的光程差造成兩光束之干涉條紋強度變化。相較於傳統的機械式陀螺儀, 光纖陀螺儀沒有機械部件,在運轉時不會受到摩擦力的影響而造成信號的漂移, 所以得到量測的值誤差比較小,其可靠性佳。此外,光纖陀螺儀還具有結構簡單、 低損耗、高敏感度等優點[3]。 近年來,隨著科技的進步,地圖的查詢越來越方便,不管是安裝在手機上的 Google Map(如圖 1.1-1)或是汽車上的 GPS 導航,都可以很方便的查詢到需要的資 訊,降低迷路的機率,甚至地圖上還會標示附近哪裡有加油站,哪裡有醫院,讓 大家可以用最近的距離在最短的時間內到達目的地,發生緊急事故時,有更多的 時間可以進行搶救。 圖 1.1-1 Google Map 示意圖13 在迷路或是在路上遇到緊急事件,使用 Google Map 或是汽車 GPS 導航的時候, 可以很快地找到距離最近的目標,如圖 1.1-2。導航雖然會將離目標最近的距離標 出,可是路上的高低起伏不管是 Google Map 亦或是 GPS 都沒辦法提供精確的 3D 路況資訊。假設今天摩托車壞掉,Google Map 上顯示最近的修車廠距離可能只有 1 公里,但是實際上它可能是需要爬坡 1 公里才能到,那這個時候是不是就可以選 擇找道路救援,而不是選擇自己將車牽至修車廠修理。 圖 1.1-2 Google Map 路線導航 本論文就是希望可以藉由光纖陀螺儀測量將路況的高低起伏,並將測量到的高度 對應到現行的 2D Map,完成 3D 的資訊整合。
14
第二章 光纖陀螺儀的原理
「工欲善其事,必先利其器」,在開始建構整體架構之前必須先了解要完成這 項研究需要設備技術及原理,並思考如何取得所需的資料。2.1 陀螺儀概述及原理
陀螺儀又稱為角速度計,測量單位為(度/秒)的角速度,而傳統陀螺儀則是測 量角位移,並須要透過計算再轉換成角速度。陀螺儀(如圖 2.1-1)是基於角動量守 恆理論,用來感測與維持方向的裝置。陀螺儀是由一個位於軸心且可旋轉的轉子 所構成,當轉子不受外力影響時,是不會改變自身角動量的方向,基於這個原理, 用來保持陀螺儀的方向性。 圖 2.1-1 陀螺儀示意圖15 陀螺儀被廣泛應用於航空以及航海領域上是因為,陀螺儀擁有兩種特性,一 種為定軸性(Inertia 或稱 Rigidity),一種為逆動性(Precession),兩種特性都是基於 角動量守恆的理論下。 定軸性 當陀螺轉子以極高速度旋轉時,就產生了慣性,這慣性使得陀螺轉子的旋轉 軸保持在空間,指向一個固定的方向,同時反抗任何改變轉子軸向的力量,這種 物理現象稱為陀螺儀的定軸性或慣性[4]。其慣性隨以下的物理量而改變: 轉子質量愈大,慣性愈大。 轉子旋轉半徑愈大,慣性愈大。 轉子旋轉速度愈大,慣性愈大。 逆動性 在運轉中的陀螺儀,如果外界施加作用或力矩在轉子旋轉軸上,則旋轉軸不 沿施力方向運動,而是順著轉子旋轉向前 90 度垂直施力方向運動,此現象即是逆 動性。典型的例子為陀螺,當陀螺開始旋轉時,自轉軸與鉛直線重合;過一段時 間後,由於摩擦損耗能量,此時會發現自轉軸偏離鉛直線(如圖 2.1-2)[5]。影響 逆動性大小的因素有以下三種: 外界作用力愈大,其逆動性也愈大。 轉子的質量慣性矩(moment of inertia)愈大,逆動性愈小。 轉子的角速度愈大,逆動性愈小。 圖 2.1-2 自轉軸偏離的陀螺[5]
16 光纖陀螺儀的原理是基於桑納克效應(Sagnac Effect),於環形光迴路中順/逆兩 光束因環的自轉速度產生干涉。如圖 3.2.1-2,陀螺儀兩道光訊號以順時針和逆時 針方向在光纖感測環中傳遞,當環沒有自轉時,此系統相對於慣性空間是靜止的, 兩道光於光纖感測環中,所走的路徑等長,因此兩道光的相位差為零;當系統相 對於慣性空間中,有一角速度 Ω 旋轉時,因光程差不同,產生干涉[11] [12]經耦 合器輸出到光檢測器。 圖 2.1-3 桑納克效應示意圖 當感測環沒有自轉時,感測環內兩道光行進的路徑相等,皆為2πR 的距離, 即相位差為零,此時交點在位置 P 上。 光纖感測環半徑長度:R,光在真空中的速率: C0,光速繞行一圈的時間:T 當感測環靜止時,順時針方向與逆時針方向的光訊號繞行一圈距離為: L = 2πR = ∁0T (3-1-1) 若感測環以一角速度Ω 以順時針方向旋轉時,此時在感測環內行進中的兩道 光的路徑則產生差異。其中順時針方向的光訊號(相對於陀螺儀的移動方向), 與 逆時針方向的光訊號交會的位置會從 P 變成 P´,此時順時針方向的光訊號路徑會 比原本多了 P 位置到 P´位置的距離,如圖 3.2.1-3。
17 圖 2.1-4 順時針方向光訊號路徑圖 P位置至P´位置的時間: T′,P位置至P´位置距離: RΩT′ 順時針方向光行進距離為: L′= 2πR + RΩT′= C0T′ (3-1-2) 經整理後可得: T′= 2πR/(C 0− RΩ) (3-1-3) 反之,如圖 3.2.1-4,逆時針方向的光訊號的路徑則會比原本的少了P位置到P´位 置的距離。 圖 2.1-5 順時針方向光訊號路徑圖 P位置至P´位置的時間: T′′,P位置至P′位置的距離: RΩT′′ 逆時針的光行進的距離為: L′′= 2πR − RΩT′′ = ∁ 0T′′ (3-1-4) 經整理後可得: T′′ = 2π/(∁0+ RΩ) (3-1-5) 由式(3-1-2)和式(3-1-4),可得知兩道光訊號所產生的光程差為: ∆L = L′− L′′= ∁ 0(T′− T′′) (3-1-6)
18
2.2 陀螺儀性能分類
從各種陀螺儀的動力學特性製作而成的儀表或是裝置中,分類出下列幾種: 光學式陀螺儀 自 1960 年雷射出現後,於 1962 年各國開始積極研發使用雷射的方位定測系 統,於是光學陀螺儀就這樣誕生了。光學陀螺儀沒有傳統的機械動態元件,所以 具有極高的穩定性。 表 2.2-1 光學式陀螺儀分類與性能介紹 名稱 功能描述 性能 圖片 雷射陀 螺儀 雷射陀螺是指一種無質量 的光學陀螺儀,利用環形雷 射器在慣性空間轉動時正 反兩束光隨轉動而產生頻 率差的效應,來敏感物體相 對於慣性空間的角速度或 轉角。是套用物理學上的一 個基本概念。 優點:沒有機械轉動部件的 摩擦引起的誤差,角位移測 量精度高,被測角速度範圍 大。 缺點:需採用膨脹係數低的 材料,需採用熱補償措施。 最小敏感角速度: 小於±0.001°/h 解析度: deg/s 工作溫度:-55℃ ~+95℃ 圖 2.2-1 雷射陀螺儀[9] 光纖陀 螺儀 光纖陀螺儀是以光纖線圈 為基礎的感測元件,由雷射 二極管所發射出兩個方向 的光線並沿著光纖傳播,光 線傳播路徑的變化,決定了 感測元件的角位移。 光纖陀螺儀的優點是全固 態、不須旋轉且無摩擦、壽 命長、精度高、啟動快、尺 寸小、重量輕、使用時只需 要低電壓即可運作。 最小敏感角速度: 0.0001°/h 解析度: deg/s 圖 2.2-2 高精度光纖陀螺儀 [10]19
MEMS 陀螺儀
MEMS 是英文 Micro Electro Mechanical systems 的縮寫,即微電子機械系統。 微電子機械系統(MEMS)技術是建立在微米/納米技術(micro/nanotechnology)基礎 上的 21 世紀前沿技術。MEMS 陀螺儀利用科裡奧利力旋轉物體在有徑向運動時 所受到的切向力,如果物體在圓盤上沒有徑向運動,科裡奧利力就不會產生。因 此,在 MEMS 陀螺儀的設計上,這個物體被驅動,不停地來回做徑向運動或者震 盪,與此對應的科裡奧利力就是不停地在橫向來回變化。現行被廣泛地運用在, 手機、筆電、遊戲機以及汽車上。MEMS 陀螺儀如圖 2.2-3。 圖 2.2-3MEMS 陀螺儀[8]
20
第三章 實驗架構
3.1 實驗架構
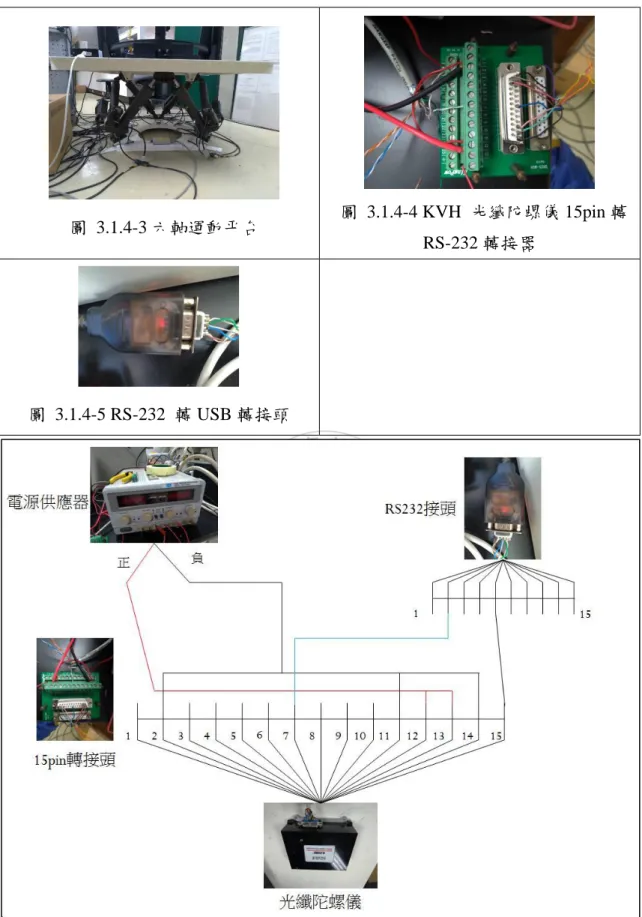
此架構是由六軸運動平台控制電腦,透過 Builder C++ 所開發的操作程式,輸 入參數給六軸運動平台馬達,來模擬行車路面高度的起伏狀態,並將光纖陀螺儀 (KVH E-CORE 2000)放置在六軸運動平台上,再由陀螺儀的角速度讀取資料進行 行車道路高度的計算。 本實驗所使用的光纖陀螺儀(KVH E-CORE 2000),可以直接輸出角速度的數 數位訊號,輸出的訊號藉由 RS-232 的傳輸方式傳送至電腦端,再由 Labview 程式 進行高度訊號的轉換,整個實驗架構如圖 3.1-1。 圖 3.1-1 光纖陀螺儀模擬系統示意圖21
3.1.1 電源供應器
將從插座所獲得的交流電轉換為外圍裝置使用的可調節式直流電,可以調整 電壓從 0 V 到 30V,提供各種不同設備所需求的不同電壓,如圖 3.1.4-1。
3.1.2 光纖陀螺儀
陀螺儀為 KVH 所生產的 E˙CORE 2000 Fiber Optic Gyro,如圖 3.1.4-2,此陀 螺儀可測量角速度、溫度、頻率,並且提供 Check Sum 進行資料驗證,以確保資 料的準確性。此陀螺儀的使用規範,詳見附錄一。
3.1.3 六軸運動平台
Hexapod 或稱 Stewart 平台,是一個平行動態系統,用六根支柱來提供運動與 定位功能,六個維度分別為: X、Y、Z、俯仰(pitch)、偏擺(yawl)及翻滾(Roll) 平移: 沿 X 軸前後移動,如圖 3.1.3-1 沿 Y 軸左右移動,如圖 3.1.3-3 沿 Z 軸上下移動,如圖 3.1.3-5 旋轉: 繞 X 軸旋轉(翻滾、Roll) ,如圖 3.1.3-2 繞 Y 軸上下旋轉(俯仰、Pitch) ,如圖 3.1.3-4 繞 Z 軸左右旋轉(偏擺、Yaw) ,如圖 3.1.3-622 表格 3.1.3-1 六軸運動平台運動示意圖 圖 3.1.3-1 沿 X 軸前後移動 圖 3.1.3-2 沿 X 軸翻滾 圖 3.1.3-3 沿 Y 軸左右移動 圖 3.1.3-4 沿 Y 軸上下俯仰 圖 3.1.3-5 沿 Z 軸上下移動 圖 3.1.3-6 沿 Z 軸左右旋轉 機構是由兩個平台和六個致動器構成的運動學結構,上部平台和六個支柱是固 定的,上平台的制動器都是由一個連接到一個球窩接頭連接。所有的制動器都是 個別獨立運動的單位元,藉由六個致動元,此平台可以調整任一方向,並且由於 結構的設計,可以達到穩定與行程的運動,藉此可以用來進行車輛運動模擬。
23
3.1.4 RS-232 訊號讀取
因 KVH E˙CORE 2000 在輸出訊號時,在數位通訊界面上,只能透過 RS-422 或 RS-232 進行資料的傳輸,但 KVH 陀螺儀的輸出接頭,詳情請見附錄二,並不 是平常看到的 RS-232 接頭,而是的 15pin 2 排接頭,所以需要透過轉接器,如圖 3.1.4-4,先將 15pin 2 排的接頭轉接出來後,連線有用到的資料傳輸 pin 到 RS-232, 再透過 RS-232 轉 USB 的轉接頭,如圖 3.1.4-5,光纖陀螺儀連接電路圖如圖 3.1.4-6, 最後再將資料輸入電腦進行處理。以下為本論文中,所使用的儀器圖: 圖 3.1.4-1 電源供應器 圖 3.1.4-2 KVH 光纖陀螺儀24
圖 3.1.4-3 六軸運動平台 圖 3.1.4-4 KVH 光纖陀螺儀 15pin 轉
RS-232 轉接器
圖 3.1.4-5 RS-232 轉 USB 轉接頭
25
3.2
六軸平台的程式控制
在實驗中,控制六軸運動平台旋轉式透過 Builder C++ 所開發的程式,如圖 3.2-1,此軟體主要控制馬達的驅動器,並下達相關程式指令使馬達動作,首先開 啟軟體,並選擇 Switch On,升起六軸運動平台,並開始設定執行相關參數,控制 六軸運動進行旋轉。 在實驗中,使用偏擺(Yaw)進行陀螺儀的測試,這個六軸運動平台邊擺的振幅 極限為±23° ,當設定超過這個數值時,會因為六軸運動平台的轉動角度無法到達, 造成無法測量,而運動週期不會使用低於 2sec/次,因為低於 2sec/次會造成六軸運 動平台轉動速度過快,使得六軸運動平台出現損傷。 圖 3.2-1 六軸運動平台控制介面26
3.2.1 陀螺儀角速度信號的讀取
在實驗中,光纖陀螺儀的讀取程式是透過 LabView 程式,首先透過 RS-232 讀 取光纖陀螺儀的訊號。因陀螺儀的訊號為 16 進位,所以需要將其拆解成 2 進位, 方便我們後面進行計算。將訊號轉換成 2 進位後,會得到 8 組訊號,每組內含 8 個 2 進位的值,總共 64 個 2 進位訊號。 每組的訊號的最後一位為 SYNCBIT,從第一組開始讀出來的值都必須為 1,0,0,0,0,0,0,0,這樣的訊號才是我們可以使用的,去除 SYNCBIT 後,只剩下 56 個 2 進位訊號,裏面包含了角速度、溫度、頻率以及 CHECKSUM,角速度在裡面 共佔了 16 個 bits,將其取出後,再將 2 進位數值換算成 10 進位,即可獲得總刻度。 因本陀螺儀可以測量-100~+99.999695 度/秒,而 16 個 bits 的角速度大小為 65535,所以每個刻度約為 0.00305 度/秒,最後將總刻度乘上每度為 0.00305 度/秒, 即刻獲得角速度,詳情請見附錄三,LabView 程式如圖 3.2.1-1。 圖 3.2.1-1 LabView 開發介面27
3.3 利用光纖陀螺儀角速度轉換成高度的計算
在實驗中,利用六軸運動平台來模擬車輛行進時的高低起伏,藉由六軸平台 運動所旋轉的角度、時間的不同,來測試光纖陀螺儀的各種不同的訊號輸出。光 纖陀螺儀所輸出的訊號為角速度,所以需要將角速度換算成高度,下面將會談到 是如何透過計算將角速度轉換為高度。 角速度是由圓形上一點,繞圓的圓弧移動所形成的,如圖 3.3-1 圖 3.3-1 角速度示意圖[13] 本次實驗假設: 車輛行進速度為:V 車輛行進速度固定時直線長度為: L 角速度為:ω 角位移為:∆θ = ω∆t 高度位移為:∆h 角度為:∆θ 圓形弧長公式為: l = n ∗ π ∗ r /180 (3-4-1) 其中 l 為弧長,n 為角度,r 為圓形半徑 由公式(3-4-1)可得: l = n ∗ r (3-4-2)28 當把弧長切成一小塊一小塊時,可把圓的弧長視為一個三角形的高,可得: ∆h = ∆L ∗ ∆θ (3-4-3) 速度對時間作積分可得距離: ∫ 𝑉𝑑𝑡0𝑡 = L (3-4-4) 由公式(3-4-4)可得 ∫ dL = Vdtt0 0 (3-4-5) 對角速度與時間做積分可得∆θ: ∫ 𝜔𝑑𝑡 = ∆𝜃𝑡0 0 (3-4-6) 由(3-4-3)、(3-4-5)與(3-4-6)可得高度: ∆h = ∫ 𝜔𝑑𝑡 ∗ 𝑡0 0 ∫ 𝑉𝑑𝑡 𝑡0 0 (3-4-7) 經整理後可得: ∆h = V ∗ ω ∗ ∆𝑡2 (3-4-8) 由(3-4-8)可得知,當時間很短時,對角速度做積分並乘上速度可得高度,如圖 3.3-2
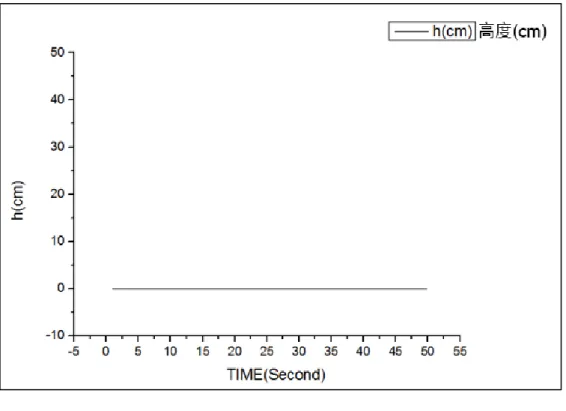
29 圖 3.3-2 速度與角速度與高度關係圖 由圖 3.3-2 可得知,當車輛使用 1cm/s 的固定速度行進時,角速度會影響高度 的高低,當角速度大於 0 時,代表在爬坡,當角速度小於 0 時,代表在下坡,而 角速度固定不動時,代表正在以勻速進行爬坡或是下坡,當數值等於 0 時,代表 沒有爬坡也沒有下坡。 接下來利用六軸平台模擬車行進時路面高度起伏的狀態,利用光纖陀螺儀測 量出角速度與時間的關係,進行高度的換算 在實驗中,當平台尚未起動時,LabView 所偵測到的角速度為 0,如圖 3.3-4, 高度如圖 3.3-5。 圖 3.3-3 平台靜止時,陀螺儀信號輸出圖
30
圖 3.3-4 平台靜止時,車行路面高度圖
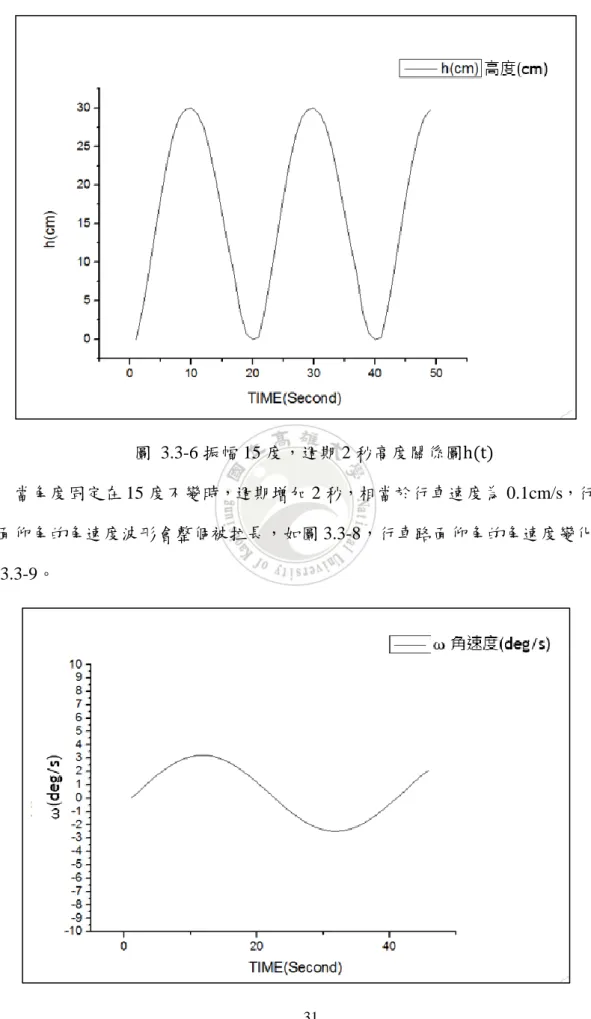
當設定六軸運動平台的條件為振幅為 15 度,週期為 2 秒時,相當於行車速度為 0.4167cm/s,行車路面仰角的角速度變化如圖 3.3-6,高度如圖 3.3-7。
31
圖 3.3-6 振幅 15 度,週期 2 秒高度關係圖h(t)
當角度固定在 15 度不變時,週期增加 2 秒,相當於行車速度為 0.1cm/s,行車 路面仰角的角速度波形會整個被拉長,如圖 3.3-8,行車路面仰角的角速度變化如 圖 3.3-9。
32 圖 3.3-7 振幅 15 度,週期 4 秒角速度波形圖ω(t) 圖 3.3-8 振幅 15 度,週期 4 秒高度關係圖h(t) 當週期固定不變,而振幅上升為 20 度時,相當於行車速度為 0.3125cm/s,則 行車路面仰角的角速度變化的高度會變高,行車路面仰角的角速度變化如圖 3.3-10, 高度如圖 3.3-11。
33 圖 3.3-9 振幅 20 度,週期 2 秒角速度波形圖ω(t) 圖 3.3-10 振幅 20 度,週期 2 秒高度關係圖h(t) 由此得知當旋轉角度越大,時間不變時,角速度變化越大,爬坡高度越陡峭, 角速度變化越小,坡度越平緩。當旋轉角度不變而時間變長時,角速度上升的速 度變慢,而坡度則平緩,而時間變短時,角速度上升的速度變快,爬坡高度越陡 峭。
34
3.4 六軸運動平台控制與道路狀況模擬
使用六軸運動平台進行車輛實驗模擬,使用廠商開發的六軸運動平台運動編 輯器,如圖 3.4-1,進行不規則的路況模擬,並觀察計算出來的高度,是否有符合 車輛模擬的設定。 圖 3.4-1 六軸平台動感運動曲線編輯介面 首先先進行平緩路況的模擬,以確保模擬出來的數值跟 Labview 程式輸出的 數據相同,第一個測試為實驗 01,角度約為 15 度,週期 4 秒的 SIN 波,如圖 3.4-2。 圖 3.4-2 實驗 01 路況角速度模擬圖35 實驗 01 測試在 Labview 程式接收到的訊號如圖 3.4-3。 圖 3.4-3 實驗 01 路況角速度輸出圖 再來進行速度較快的 SIN 波模擬,第二個實驗為實驗 02,角度約為 15 度,週 期 2 秒的 SIN 波,如圖 3.4-4。 圖 3.4-4 實驗 02 路況角速度模擬圖 實驗 02 測試在 Labview 程式接收到的訊號如圖 3.4-5。
36 圖 3.4-5 實驗 02 路況角速度輸出圖 最後測試不規則車況角速度模擬實驗,一開始為先緩緩爬坡,並直線行駛一 段時間後,開始下坡,並且坡度越來越陡,最後在爬坡並回到最一開始的高度, 如圖 3.4-6。 圖 3.4-6 模擬道路角速度變化圖 當設定好六軸運動平台的運動參數後,開始透過 KVH 光纖陀螺儀讀取角速度, 並將輸出成波形如圖 3.4-7。
37 圖 3.4-7 陀螺儀角速度所量測結果 透過圖 3.4-7 可以知道,光纖陀螺儀所輸出的角速度,是如同剛剛所設計的道 路角速度變化圖,而經過程式計算後高度如圖 3.4-8。 圖 3.4-8 高度換算的變化圖 由此實驗可以看出透過光纖陀螺儀所取得的角速度,經過計算所得到的高度 是符合這次的道路高低模擬,雖然會因為六軸平台啟動時,造成誤差,導致高度 不夠準確,而造成波形沒有如同一開始所設定的波形這麼漂亮,但是,將光纖陀 螺儀放置在自走車上,並且在路上移動時,所取得的資料,是可以推算出車輛行
38 進時當下的道路高低。
第四章 結果與討論
4.1 效果驗證
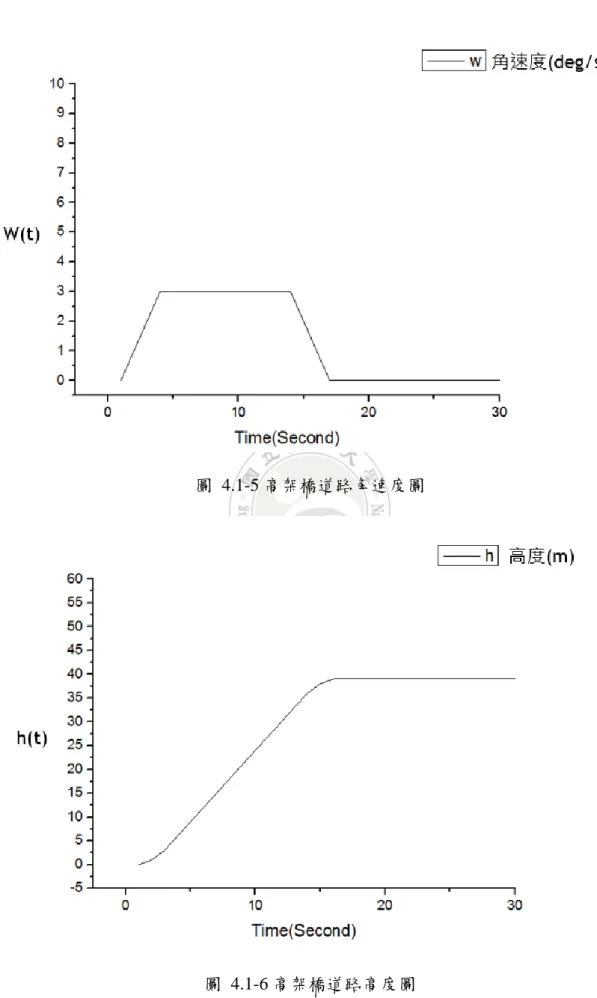
本論文將六軸運動平台與光纖陀螺儀結合,經由實驗結果的分析可知,當光 纖陀螺儀所測量出來的角速度為正值時,數值越大,代表高度越高,有可能是在 爬坡;當測量出來的角速度為負值時,數值越小,代表高度越低,有可能是在下坡。 以下為本實驗的光纖陀螺儀進行道路比較,當今天在平地上移動時,Google Map 所顯示的地圖如圖 4.1-1,而光纖陀螺儀所測量出來的角速度如圖 4.1-2,高度 如圖 4.1-3。 圖 4.1-1 Google Map 平面道路圖39 圖 4.1-2 平面道路角速度圖 圖 4.1-3 平面道路高度圖 當從平面往高架橋上移動時,Google Map 所顯示的地圖如圖 4.1-4,而光纖陀 螺儀所測量出來的角速度如圖 4.1-5,高度如圖 4.1-6。 圖 4.1-4 Google Map 高架橋道路圖
40
圖 4.1-5 高架橋道路角速度圖
41 由以上的測試可以得知將光纖陀螺儀加入地圖後,是可以得到地圖的高低落 差,用 KVH 光纖陀螺儀來測量高度時,依據 KVH 光纖陀螺儀的規範,精準度可 以到達小數點後 5 位數,相比 GPS 的壓力測量,可以有更小更精確的數值,可以 更符合在道路上行走的實際狀況。
4.2 未來展望
未來希望可以透過更加精確的設備來進行地圖的高度測量,只需要在繪製地 圖時,放置陀螺儀在自走車上,固定車速,並且時刻收集角速度的資料,則可以 將陀螺儀所輸出的資料透過車速,行走距離,時間,等數值換算出地圖的高度, 後續則可以再將所換算出來的高度,結合 2D 地圖,這樣就可以得到有高度的 3D 地圖,這樣在以後一定會對所有在使用地圖,或是需要知道高度的人很大的幫助。42
參考文獻
[1] U. Eco 與 謝瑤玲譯, 傅科擺, vol. 12, 皇冠出版社, 1992, pp. 888-890. [2] 王蘶 與 張桂才, 光纖陀螺儀, 國防工業出版社, 2002. [3] 康獻文, 光纖陀螺儀之感測研究, 國立中山大學電機工程研究所電波光電碩士 論文. [4] 李榮華(2015)。機械力學Ⅱ。臺北市:龍騰 [5] 黃智賢(2014)搞定陀螺儀―從傳統到現代。物理雙月刊,36(3)228-235. [6] 蕭景全, 環型雷射光纖陀螺儀之角速度量測應用研究, 國立高雄大學,2015 . [7] 姜德生, 楊志勇 與 胡文彬, 光纖陀螺儀測量震動方法數值, 武漢理工大學報, 2002. [8] 白俊弘, 以 MEMS 陀螺儀開發角度定位系統之研究, 修平技術學院, 精密機械 與製造科技研究所, 2010. [9] 國家中山科學研究院, 雷射陀螺儀 http://www.ncsist.org.tw/csistdup/products/product.aspx?product_Id=189&catalog=21 [10] 陝西航天長城測控有限公司 VG0035PD 高精度光纖陀螺儀 http://www.hi1718.com/product/201138112435630.html [11] 游俊坤, 光纖陀螺儀, 國立中央大學光電科學研究所碩士論文,2003. [12] 吳曜東, 光纖原理與應用, 全華科技圖書股份有限公司, 2001. [13] 藍全偉, 雜訊對 GPS 訊號之影響以及角速度器結合定位之應用, 國立台灣科 技大學電子工程學系, 2007.43
附錄一
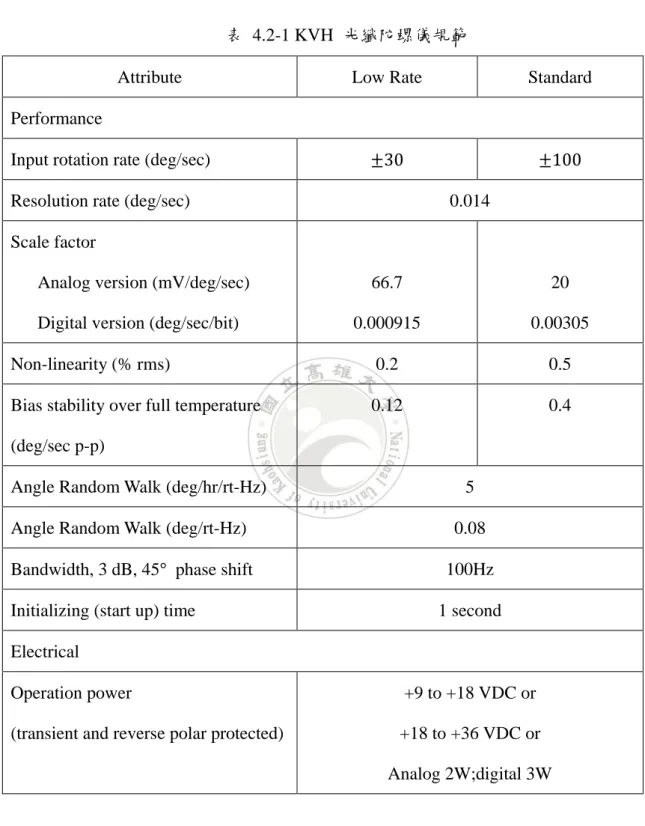
表 4.2-1 KVH 光纖陀螺儀規範
Attribute Low Rate Standard
Performance
Input rotation rate (deg/sec) ±30 ±100
Resolution rate (deg/sec) 0.014
Scale factor
Analog version (mV/deg/sec) Digital version (deg/sec/bit)
66.7 0.000915
20 0.00305
Non-linearity (% rms) 0.2 0.5
Bias stability over full temperature (deg/sec p-p)
0.12 0.4
Angle Random Walk (deg/hr/rt-Hz) 5
Angle Random Walk (deg/rt-Hz) 0.08
Bandwidth, 3 dB, 45° phase shift 100Hz
Initializing (start up) time 1 second
Electrical
Operation power
(transient and reverse polar protected)
+9 to +18 VDC or +18 to +36 VDC or Analog 2W;digital 3W
44 Analog output Turning rate Rate reference Internal temperature +2.5 VDC ±2.0 VDC into 10kΩ load +2.5 VDC into 10kΩ load 20mVDC/℃ into 10kΩ load Digital Output Rate Internal temperature RS232 or RS422 @ 9600 baud 15 bits plus sign precision
0.05℃/bit Environmental Operation temperature -40° to +75℃ (-40° to +167℉) Storage temperature -50° to +85℃ (-58° to +185℉) Dimensions 112mm x 108mm x 43mm 4.41’’x4.27’’x1.69” Weight 340 gm (12 oz)
45
附錄二
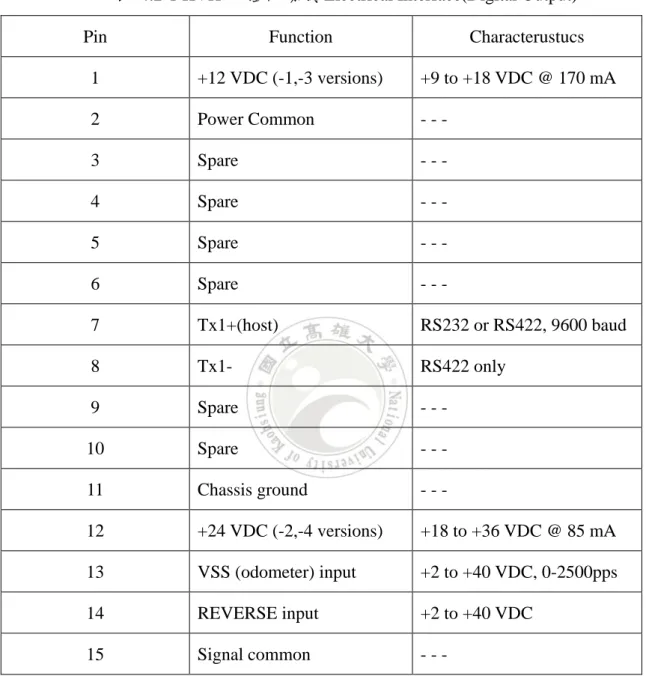
表 4.2-1 KVH 光纖陀螺儀 Electrical Interface(Digital Output)
Pin Function Characterustucs
1 +12 VDC (-1,-3 versions) +9 to +18 VDC @ 170 mA 2 Power Common - - - 3 Spare - - - 4 Spare - - - 5 Spare - - - 6 Spare - - - 7 Tx1+(host) RS232 or RS422, 9600 baud 8 Tx1- RS422 only 9 Spare - - - 10 Spare - - - 11 Chassis ground - - - 12 +24 VDC (-2,-4 versions) +18 to +36 VDC @ 85 mA 13 VSS (odometer) input +2 to +40 VDC, 0-2500pps 14 REVERSE input +2 to +40 VDC 15 Signal common - - -
46
附錄三
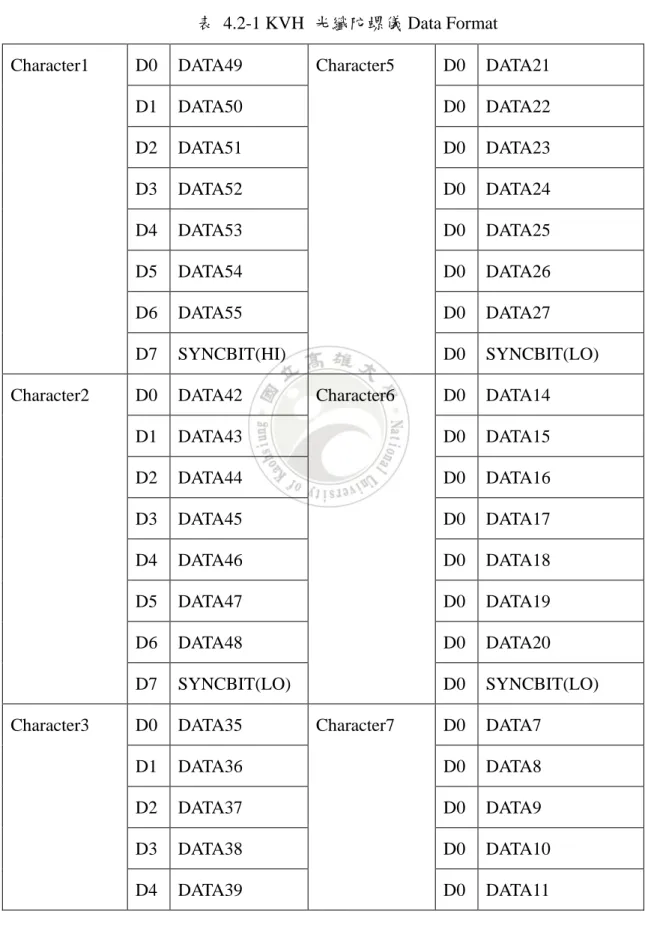
表 4.2-1 KVH 光纖陀螺儀 Data Format
Character1 D0 DATA49 Character5 D0 DATA21
D1 DATA50 D0 DATA22 D2 DATA51 D0 DATA23 D3 DATA52 D0 DATA24 D4 DATA53 D0 DATA25 D5 DATA54 D0 DATA26 D6 DATA55 D0 DATA27 D7 SYNCBIT(HI) D0 SYNCBIT(LO)
Character2 D0 DATA42 Character6 D0 DATA14
D1 DATA43 D0 DATA15 D2 DATA44 D0 DATA16 D3 DATA45 D0 DATA17 D4 DATA46 D0 DATA18 D5 DATA47 D0 DATA19 D6 DATA48 D0 DATA20 D7 SYNCBIT(LO) D0 SYNCBIT(LO)
Character3 D0 DATA35 Character7 D0 DATA7
D1 DATA36 D0 DATA8
D2 DATA37 D0 DATA9
D3 DATA38 D0 DATA10
47
D5 DATA40 D0 DATA12
D6 DATA41 D0 DATA13
D7 SYNCBIT(LO) D0 SYNCBIT(LO)
Character4 D0 DATA28 Character8 D0 DATA0
D1 DATA29 D0 DATA1 D2 DATA30 D0 DATA2 D3 DATA31 D0 DATA3 D4 DATA32 D0 DATA4 D5 DATA33 D0 DATA5 D6 DATA34 D0 DATA6 D7 SYNCBIT(LO) D0 SYNCBIT(LO)
48
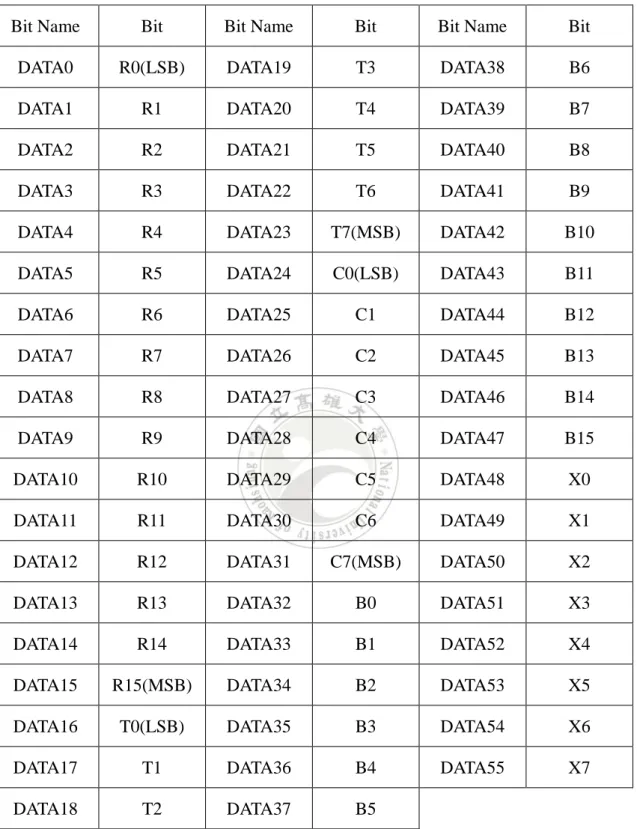
表 4.2-2 KVH 光纖陀螺儀 Message Contents
Bit Name Bit Bit Name Bit Bit Name Bit
DATA0 R0(LSB) DATA19 T3 DATA38 B6
DATA1 R1 DATA20 T4 DATA39 B7
DATA2 R2 DATA21 T5 DATA40 B8
DATA3 R3 DATA22 T6 DATA41 B9
DATA4 R4 DATA23 T7(MSB) DATA42 B10
DATA5 R5 DATA24 C0(LSB) DATA43 B11
DATA6 R6 DATA25 C1 DATA44 B12
DATA7 R7 DATA26 C2 DATA45 B13
DATA8 R8 DATA27 C3 DATA46 B14
DATA9 R9 DATA28 C4 DATA47 B15
DATA10 R10 DATA29 C5 DATA48 X0
DATA11 R11 DATA30 C6 DATA49 X1
DATA12 R12 DATA31 C7(MSB) DATA50 X2
DATA13 R13 DATA32 B0 DATA51 X3
DATA14 R14 DATA33 B1 DATA52 X4
DATA15 R15(MSB) DATA34 B2 DATA53 X5
DATA16 T0(LSB) DATA35 B3 DATA54 X6
DATA17 T1 DATA36 B4 DATA55 X7
DATA18 T2 DATA37 B5