國
立
交
通
大
學
資訊科學與工程研究所
碩
士
論
文
以 AFSM 為基礎的感測/驅動控制混合程式驗證
Hybrid Program Verification for AFSM-based
Sensory-Motor Control
研 究 生:龔哲正
指導教授:邵家健 教授
以 AFSM 為基礎的感測/驅動控制混合程式驗證
Hybrid Program Verification for AFSM Based Sensory-Motor
Control
研 究 生:龔哲正 Student:Zhe-Zheng Gong
指導教授:邵家健 Advisor:John Kar-kin Zao
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A Thesis
Submitted to Institute of Computer Science and Engineering
College of Computer Science
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master
in
Computer Science
July 2006
Hsinchu, Taiwan, Republic of China
Hybrid Program Verification for AFSM Based Sensory-Motor
Control
Student:Zhe-Zheng Gong Advisors:John Kar-kin Zao
Institute of Computer Science and Engineering
National Chiao Tung University
ABSTRACT
In this thesis, we develop a method to apply formal verification of Temporal Logic onto an
autonomous robot system controlled by Rodney Brooks’ Augmented Finite State Machine
model.
This method uses some approaches to reduce the complexity of an AFSM-based reactive
robot control system (RRCS), so that verification of AFSM-based RRCS can become
applicable. These approaches applied onto verification include : (1) State Space
Discretization──It is not feasible to verify a system on continuous space-time domain.
Therefore, before constructing an AFSM-based RRCS we must transform the system and
environment from continuous space domain to discrete space domain. (2) External
function──By exporting internal states and kinematic computation of the robot from the
model checker using the external function provided by OMocha temporal logic model checker.
(3) Elimination of some checking cases──Based on the properties we want to check, we can
eliminate some unnecessary checking cases which will never violate the properties.
After using above-mentioned approaches, the results show that the number of all reachable
states checked by OMocha and checking time improve greatly.
In this thesis, we reach some accomplishments listed below:
(1) Check the Behaviors of the AFSM-based RRCS by Model Checker──After constructing
the AFSM-based RRCS, we describe the “No Collision” property by Temporal Logic, and
two-dimensional environment.
(2) Improve the Performance of Checking Procedure──After reducing the checking time by
the three approaches, the best results show that the checking procedure can be completed in
reasonable time.
According to the accomplishments, we can prove that it’s applicable to apply verification
以 AFSM 為基礎的感測/驅動控制混合程式驗証
學生:龔哲正 指導教授:邵家健
國立交通大學資訊科學與工程研究所 碩士班
摘 要
在這篇論文中,我們發展一個方式將時序邏輯正規驗證法,應用在由 Rodney Brooks 所提出的增強化有限態機器(AFSM)所控制的自主性機器人上。 在這個方式中,我們使用了一些方法去簡化以 AFSM 為基礎的感應式機器控制系統 (RRCS)的複雜度,讓以 AFSM 為基礎的 RRCS 之驗證能夠有可行性。這些被應用在驗證上 的方法包括有:(1)狀態空間離散化──驗證一個在連續定義域上的系統是不可行的。 因此,在建構一個以 AFSM 為基礎的 RRCS 之前,我們必須將系統及環境從連續定義域轉 換到分散定義域。(2)外部函數──藉由 OMocha 所提供的外部函數,將系統中的內部狀 態及運動學上的計算從驗證器中輸出至外部函數。(3) 去除掉不必要的檢驗部分──根 據我們所要檢驗的行為特性,我們能夠將必定不會違背此特性的一些檢驗部分去除掉。 在運用了上述的這些方法後,結果中顯示,被 OMocha 檢驗的全部可到達狀態數目及 檢驗時間都改善了很多。 在這篇論文中,我們將達成的一些成果列在下面: (1)用檢驗器檢驗以 AFSM 為基礎的 RRCS 之行為特性──在建構起以 AFSM 為基礎的 RRCS 後,我們用時序邏輯來描述"No_Collision"這個特性,並且證明了被此 RRCS 控制的 機器人在二維空間中將永遠不會碰到障礙物。 (2)改善檢驗程序的效率──在藉由三個方法來縮短檢驗時間後,最佳的結果中顯示檢 驗程序能夠在合理的時間內被完成。
致謝
論文定稿後,我自己重新將論文看了一遍,其中有很多不夠完美的地方,但相信我有 盡我所能去做到最好,希望所有在過程中給予我幫助的大家能夠滿意這篇論文所呈現出 來的樣貌,這是我唯一能夠回報的。 首先,要感謝邵家健教授不斷耐心地給予我指導,雖然老師講的有些東西我好像永遠 沒有弄懂,但我已經從我弄懂的事情中獲得了很多,那已經很足夠了,對於研究、對於 人生,您都是我的良師益友。另外,很感激王柏堯老師及黃耿典學長的協助,希望這次 的合作成果能夠讓你們滿意,也期望將來能繼續合作將這個題目延伸發展下去。再來, 要謝謝實驗室所有的同伴們,過程中互相打氣激勵是一個很重要的動力,在好的研究環 境中才會有好的研究成果,很慶幸能夠和大家一起努力,一同營造出這樣一個令人感到 舒服有鬥志的氛圍。 最後,要感謝我的父母,謝謝你們的栽培,相信你們看不懂這篇論文,不過其中的每 一字一句都是因為你們才存在的。 謝謝大家,也謝謝我自己,辛苦了… 2006/07/26 寫於 620 實驗室Contents
Abstract……….I 摘要………..III 致謝……….V Contents………..VI List of Figures………...IX List of Tables………XI Chapter 1 Introduction………….………1 1.1 Project Objective………...……….……...1 1.2 Project Approach………...1 1.3 Outline of Thesis………...3Chapter 2 AFSM-based Reactive Robot Control Systems and Roving Robot Collision Avoidance Experiment………..4
2.1 Augmented Finite State Machine (AFSM) ………4
2.1.1 Why AFSM?...4
2.1.1.1 Simple Procedure for Decomposing and Combining……….4
2.1.1.2 Time Discretization……….5
2.2 Roving Robot Collision Avoidance Experiment ………6
2.2.1 Experiment Overview……….6
2.2.2 Hardware Structure of the Robot………7
2.2.2.1 Sonar Sensors………7
2.2.2.2 Motor………...7
2.2.4 Expected Behaviors of the Experiment………8
2.2.5 Properties To Be Verified………9
Chapter 3 Model Checking for AFSM-based RRCS, Concepts………10
3.1 Checking Procedure………..10
3.1.1 Two Examples of Checking Procedure……….10
3.1.1.1 Simple Example………10
3.1.1.2 Advanced Example………11
3.2 Model Checker:OMocha………..14
3.3 Formal Input Language for OMocha………14
3.3.1 Programs Described by UNITY-based specification language….………14
3.3.2 Properties Described by Temporal Logic………18
Chapter 4 Model Checking for AFSM-based RRCS, Approaches………20
4.1 State Space Discretization……….20
4.2 External Function for Computation/State Hiding……….22
4.2.1 Computation Hiding………..22
4.2.2 State Hiding………...24
4.3 Elimination of Unnecessary Checking Cases………...26
Chapter 5 Implementation of Roving Robot Collision Avoidance Experiment…………27
5.1 Full Structure of the Experiment………...27
5.2 Introduction for each AFSM Module in detail………...29
5.3 Property To Be Verified:”No_Collision” property………...51
Chapter 6 Experiment Results and Analysis………52
6.1 State Hiding Applied to the Experiment………52
6.2 Elimination of Some Checking Cases Applied to the Experiment………53
6.2.1 Principle………53
6.2.3 Approach for Partial Elimination………56
6.2.4 Issue:Unrealistic Cases………57
6.3 Coarse Sampling of States………...57
6.4 Checking Results of the Experiment Applied Different Approaches………58
6.4.1 Case1:Only Apply State Hiding to the Experiment……….59
6.4.2 Case2:Apply State Hiding and Partial Elimination of Checking Cases………...59
6.4.3 C a s e 3 : A p p l y St a t e H i d i n g a n d S m a r t E l i mi n a t i o n o f C h e c k i n g Cases………60
6.4.4 Case4:Apply State Hiding and Coarse Sampling of States….………...60
6.5 Analysis……….61
Chapter 7 Conclusion……….64
7.1 Accomplishment………...64
7.2 Future Work………...65
List of Figures
Fig. 2-1 Modularized AFSM module………4
Fig. 2-2 Transition function of AFSM module………4
Fig. 2-3 Independent AFSM component………5
Fig. 2-4 The chart of the experiment ……….6
Fig. 2-5 Hardware structure of the robot………7
Fig. 2-6 Environment of the experiment………8
Fig. 3-1 Simple example of AFSM-based system………12
Fig. 3-2 Advanced example of AFSM-based system………13
Fig. 3-3 The trace-tree of verification procedure of advanced example…….14
Fig. 3-4 The trace-tree of verification procedure of simple example……….14
Fig. 3-5 Module description………...15
Fig. 3-6 Example for atoms definition………16
Fig. 3-7 The relationship between latched value and updated value…….17
Fig. 4-1 The relationship between continuous and discrete MAP…………21
Fig. 4-2 An example of the relationship between continuous and discrete domain…21 Fig. 4-3 Encapsulation procedure………25
Fig. 5-1 Full structure of the experiment………....27
Fig. 5-2 MAP module……….29
Fig. 5-3 Some examples for the representation of MAP_obstacle/MAP_wall..30
Fig. 5-4 MAP 1.0………31
Fig. 5-5 UNITY fragment of MAP……….31
Fig. 5-6 SONAR module………...32
Fig. 5-7 Detection range………33
Fig. 5-8 Some examples for the representation of SMAP_obstacle…….33
Fig. 5-9 UNITY fragment of SONAR………34
Fig. 5-10 Fragment of external function detection()……….35
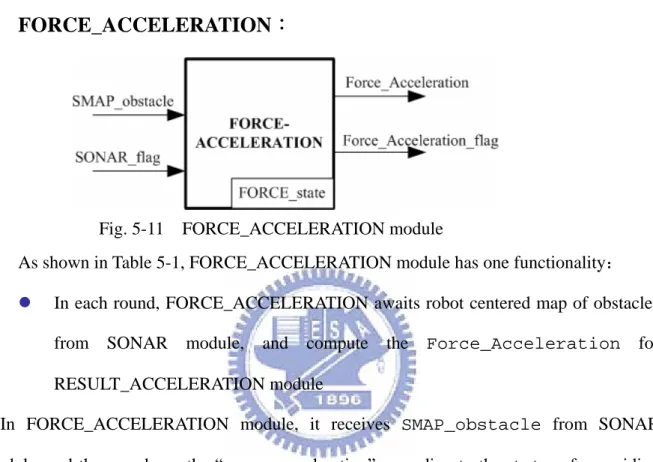
Fig. 5-11 FORCE_ACCELERATION module………..36
Fig. 5-12 The relationship between SMAP_obstacle and Force_Acceleration…37 Fig. 5-13 UNITY fragment of FORCE_ACCELERATION………..38
Fig. 5-14 Fragment of external function SMAP_to_FORCE()………39
Fig. 5-15 RANDOM_ACCELERATION module………..40
Fig. 5-16 The relationship between SMAP_obstacle and Random_Acceleration…41 Fig. 5-17 UNITY fragment of RANDOM_ACCELERATION………..42
Fig. 5-18 RESULT_ACCELERATION module………..42
Fig. 5-19 UNITY fragment of RESULT_ACCELERATION……….44
Fig. 5-21 Some examples of updating Velocity………46
Fig. 5-22 UNITY fragment of VELOCITY……….47
Fig. 5-23 Fragment of external function Update_Velocity()……….48
Fig. 5-24 MOTOR module………49
Fig. 5-25 Some examples of updating Location………49
Fig. 5-26 UNITY fragment of MOTOR………..50
Fig. 5-27 “No_Collision” property checked by OMocha………51
Fig. 6-1 Some variables encapsulated into external function………52
Fig. 6-2 Wandering region………..53
Fig. 6-3 An example for verification procedure………54
Fig. 6-4 The parts of verification procedure can be omitted………54
Fig. 6-5 The partial verification procedure is the collection of checking cases…55 Fig. 6-6 Outward velocities make the robot leave the wandering region………....55
F i g . 6 - 7 T h r e e e x a m p l e s o f c h e c k i n g c a s e s … … … 5 6 Fig. 6-8 All velocities of a state in wandering region………..56
Fig. 6-9 Only half points of wandering region will generate random acceleration...57
List of Tables
Table 3-1 Sequential state transition of simple AFSM-based system………12
Table 3-2 Sequential state transitions of advanced AFSM-based system……….13
Table 5-1 Brief introduction for 7 AFSM modules……….29
Table 5-2 All variables in MAP module………..35
Table 5-3 All variables in SONAR module……….34
Table 5-4 The relationship between “Distance of X-axis away from the obstacle in SMAP_obstacle” and “X-axis component of reverse acceleration degree in Force_Acceleration”………..36
Table 5-5 All variables in FORCE_ACCLERATION module………...38
Table 5-6 All variables in RANDOM_ACCLERATION module………...41
Table 5-7 All variables in RESULT_ACCLERATION module………...44
Table 5-8 All variables in VELOCITY module………...47
Table 5-9 All variables in MOTOR module……….50
Table 5-10 “No_Collision” property……….51
Table 6-1 All parameters of the experiment ………59
Chapter 1
Introduction
1.1 Project Objective
How to write modular reusable programs has always been a major challenge to the
developers of autonomous robots. Rodney Brooks of MIT proposed a new approach, called
Augmented Finite State Machines (AFSM) [1], to program reactive robot control systems (RRCS). The AFSM approach allowed robot programmers to create program modules that
control robot behaviors and develop complex robot behaviors by the composition of these
AFSM modules.
The purpose of this work is to explore the possibility of using formal verification technique
to verify certain properties of the behaviors of AFSM controlled robots. Such a verification
technique will enable robot programmers to test or “debug” their programs before using them
to actually control the robots. The difficulty of this attempt of formal verification lies with the
fact that robot motions are carried out continuously on space and time whereas formal
verification can only be applied onto systems with limited number of discrete states.
Therefore, the challenge is to properly discretize and reduce the number of states of a robot
system so that formal verification can become applicable.
1.2 Project Approach
We explore ways to apply formal verification onto AFSM programs by experimenting with
following approaches/methods.
(A) State Space Discretization
To verify a system on continuous domain is not applicable. Therefore, before constructing
an AFSM-based RRCS we must transform the system and environment from continuous
Discretization, and (2) Space Discretization. After discretization, the number of states of the
system will reduce from infinite to finite so that formal verification can become more
applicable.
(B) Using external function to reduce number of states checked by model checker
External functions are written by high-level language(e.g. C language). For following
reasons, we can use external function to reduce number of states checked by model checker.
(1) During verification procedure, there are some system variables which are irrelevant to
behavior verification. Therefore, we can export these variables through external function in
order to reduce the number of states checked by model checker, so that the unnecessary
loading for model checker will reduce. (2) In a system, some complex computation can’t be
handled by model checker, because the purpose of model checker is for verification but not
suitable for handling complex computation. Therefore, we must export these complex
computations through external function.
(C) Eliminate unnecessary checking cases
Based on the properties we want to check, we can eliminate some unnecessary checking
cases, because this part of verification procedure will never violate the properties. The
overhead of this approach is that we must analyze the behaviors of the system in advance,
otherwise, we can’t decide which part of verification procedure can be eliminated.
After applying above-mentioned approaches, we hope that formal verification will become
applicable for a system on continuous domain originally.
1.3 Outline of Thesis
The rest of this thesis is organized as follows. In Chapter 2, we explain the AFSM-based
RRCS and Roving Robot Collision Avoidance Experiment. In Chapter 3, we introduce the
of model checking for AFSM-based RRCS. In Chapter 5, the implementation of roving robot
collision avoidance experiment is described in detail. In Chapter 6, we show the results of
properties checking of the experiment, and analysis the results. The conclusion and future
Chapter 2
AFSM-based RRCS and Roving Robot
Collision Avoidance Experiment
2.1 Augmented Finite State Machine (AFSM)
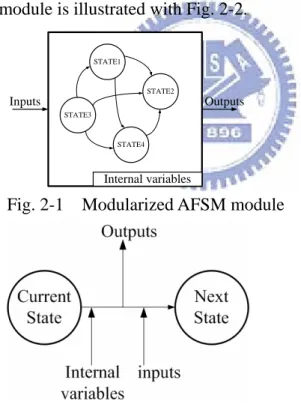
The chart of a modularized AFSM module is shown as Fig. 2-1. There are some states and
variables in a module. State transitions are determined according to transition functions
between states. These transition functions don’t only take current state and inputs as
parameters, but internal variables. The inputs come from other modularized AFSM modules;
The outputs of state transition are sent to other modularized AFSM modules. Transition
function of AFSM module is illustrated with Fig. 2-2.
STATE1 STATE4 STATE3 STATE2 Internal variables Inputs Outputs
Fig. 2-1 Modularized AFSM module
Fig. 2-2 Transition function of AFSM module
2.1.1 Why AFSM?
2.1.1.1 Simple Procedure for Decomposing and Combining
Rodney Brooks thinks that control mechanism of robot resembles animals: A RRCS can be
independent components composed of modularized AFSM modules interact with each other,
and therefore make up complete abilities for the RRCS. We’ll call these independent
components AFSM component .
Take human beings for example, the brain, hands, legs, and body are independent
components. Each component is composed of some parts. For instance, a hand is composed of
the skin, muscle, and bones. If we want to construct a human being by the concept of
AFSM-based RRCS, the hand will be counted in an AFSM component, and the skin, muscle,
and bones will be counted in modularized AFSM modules.
Because each AFSM module is a simple FSM, it can be handled by human being’s
capability. The simple procedure for decomposing and combining is one of the reasons why
we construct a RRCS with AFSM modules. After constructing some modularized AFSM
modules, these AFSM modules could connect with each other, and then they will become an
independent AFSM component. Finally, a complete RRCS is constructed with some AFSM
components. The structure of AFSM component is illustrated with Fig. 2-3.
Fig. 2-3 Independent AFSM component
2.1.1.2 Time Discretization
We had explained the purpose of discretization in 1.2, the first step of discretization
procedure is Time Discretization. In AFSM, time interval between current state and next state
which occurs at continuous time will be shifted to the closest discrete time point.
2.2 Roving Robot Collision Avoidance Experiment
After explaining the concept of AFSM, we will introduce the AFSM-based roving robot collision avoidance experiment [1] in detail.
The experiment had been simulated in [1]. In this work, we want to rebuild it, and check
the properties of the behaviors of the AFSM-based RRCS. The implementation of the
experiment will be discussed later in Chapter 5.
2.2.1 Experiment Overview
Fig. 2-4 The chart of the experiment
In the experiment, the robot is placed on a two-dimensional environment. The robot has
some sonar sensors for detecting the environment, and has a motor for generating force to
change its velocity. The motor can generate a force which has 8 kinds of directions, and make
the robot move towards 8 kinds of directions which are {U,D,L,R,LU,LD,RU,RD}. The robot
is controlled by AFSM-based RRCS, the RRCS monitors the information detected by sonar
sensors and then decides to issue what command to motor for changing the robot’s velocity.
Whenever the location of robot changes, sonar sensors will detect the environment. If there
are some obstacles within detection range of sonar sensors, the RRCS will decide new
obstacles; if there is no obstacle within detection range, the RRCS will let the robot wander
aimlessly around in the environment.
After constructing the AFSM-based RRCS for controlling the robot, we check some
properties of the behavior of the robot by OMocha.
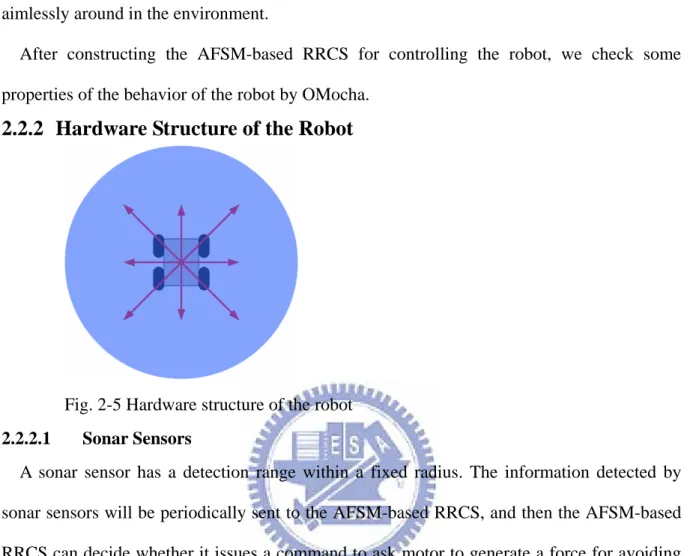
2.2.2 Hardware Structure of the Robot
Fig. 2-5 Hardware structure of the robot
2.2.2.1 Sonar Sensors
A sonar sensor has a detection range within a fixed radius. The information detected by
sonar sensors will be periodically sent to the AFSM-based RRCS, and then the AFSM-based
RRCS can decide whether it issues a command to ask motor to generate a force for avoiding
collision with obstacles or not.
2.2.2.2 Motor
The motor of robot continuously wait for a command sent by the AFSM-based RRCS.
There are two kinds of commands sent by the AFSM-based RRCS. The first kind of command
is “random force” command, the “random force” command asks the motor to generate a force
which has random degree and direction, and then the force will generate an acceleration
which makes the velocity of the robot to be changed. The second kind of command is
“assigned force” command, the “assigned force” command asks the motor to generate a force
which has assigned degree and direction. Finally, the “assigned force” command will change
the velocity of the robot as well as the “random force” command.
acceleration of robot has a range from 0 to Max_Force_Degree/M ; moreover, the degree of
robot’s velocity has a range from 0 to Max_Velocity_Degree. Therefore, if the degree of
robot’s velocity has reached Max_Veloctiy_Degree and then the motor will ignore the
“random force” or “assigned force” command which has the same direction as current
velocity.
2.2.3 Environment
Fig. 2-6 Environment of the experiment
The environment of the experiment is a two-dimensional space. Its shape is rectangle, and
has walls on four sides, and has some obstacles on four corners.
2.2.4 Expected Behaviors of the AFSM-based RRCS
The robot which is placed on a two-dimensional environment has two main abilities. The
two abilities are sensing obstacles by sonar sensor and moving around by motor. Based on the
two abilities provided by robot, the AFSM-based RRCS wants to make the robot achieve two
main behaviors:
A. Wander aimlessly keeping to Newton’s first and second laws of motion.
B. Make the robot avoid collision with obstacles in environment.
z
How to achieve the two behaviors
The first behavior can be achieved more easily. The AFSM-based RRCS can periodically
issue a command to ask motor to generate a directional force, and the direction and degree of
between force and acceleration is “A=F/M1”. Therefore, the force will generate acceleration
for the robot, and then the velocity of the robot will be changed. Finally, the robot will move
to a new location according to latest velocity.
If the motor generates a force whose degree equals to 0, the robot will keep its original
velocity keeping to Newton’s first laws of motion.
After achieving the first behavior, the robot can wander aimlessly, but it can’t avoid
collision with obstacles in environment. In order to achieve the second behavior—“avoid
collision with obstacles”, the AFSM-based RRCS must monitor the information of the
environment detected by sonar sensors. If there is an obstacle in detection range of sonar
sensors, the AFSM-based RRCS will pass a command to ask motor to generate a force which
has a reverse direction of the obstacle, ant then the force will generate a reverse acceleration,
finally the robot will gradually keep away from the obstacle. Therefore, the approach can
keep the robot to avoid collision with obstacles in environment, and can achieve the second
behavior.
2.2.5 Properties To Be Verified
The property we want to check by OMocha is:
Whether the robot will collide with obstacles or walls?
The robot has the two above-mentioned behaviors can wander aimlessly around the
environment and try to avoid collision with obstacles. However, the strategy determined by
the RRCS for avoiding collision doesn’t guarantee the robot doesn’t collide with obstacles. In
the strategy for avoiding collision, the relationship between “Distance away from the
obstacles” and “Reverse acceleration” is the most important part.
In order to make sure the behavior of the strategy is the same as our expected behavior, we
must describe the property with Temporal Logic and check whether the strategy really makes
the robot not to collide with obstacles. The checking procedure is completed by OMocha.
1
Chapter 3
Model Checking for AFSM-based RRCS,
Concepts
After introducing AFSM and roving robot collision avoidance experiment, we’ll explain
how to verify an AFSM-based RRCS by model checker. In this section, we will explain the
principle of model checking by the verification procedure of model checker, OMocha [4]. The
introduction for OMocha is in Section 3.2.
In Section 3.1.1, we will give two examples for explaining the verification procedure. In
the two examples, we will use the formal input language for OMocha. The formal input
language for OMocha is explained in detail in Section 3.3.
3.1 Verification Procedure
The concept of verification procedure is step by step to explore all reachable states from
initial state, and then check whether all explored reachable states which represent the
behaviors of programs satisfy the properties.
3.1.1 Two Examples of Verification Procedure
3.1.1.1 Simple Example
Take a simple AFSM-based system shown in Fig. 3-1 as an example. The AFSM-based
system is composed of two AFSM modules. The property we want to check is “AG
((STATE_A=A2 && A_B=false)||(STATE_A=A1 && A_B=true))”. It means
whether “((STATE_A=A2 && A_B=false)||(STATE_A=A1 && A_B=true))” is
always true from initial state to all reachable states.
The definition of initial state is the combination of all variables’ initial values of a system.
The initial state of the AFSM-based system is { STATE_A=A1 , A_B=false , STATE_B=B1 }.
described in programs, the sequential state transition of the AFSM-based system is listed as
Table 3-1. The next state of the initial state, which is also the 2nd state of the AFSM system is
{STATE_A=A2 , A_B=false , STATE_B=B1 }. Then the next state of the 2nd state, which is
also the 3rd state of the AFSM system is { STATE_A=A1 , A_B=true , STATE_B=B1 }.
OMocha will keep on exploring the next state of every state. Finally, OMocha will find out
that the 2nd to the 5th states are all possible reachable states from the initial state. Then the 6th
to the 9th states repeat the value of the 2th to the 5th state, and so on. The all possible states of
the system include the initial state and all possible reachable states from the initial state.
During the procedure of exploring all possible states of the system, OMocha detects the
behaviors of the programs violate the properties at initial state. Therefore, the behaviors of the
programs don’t satisfy the properties.
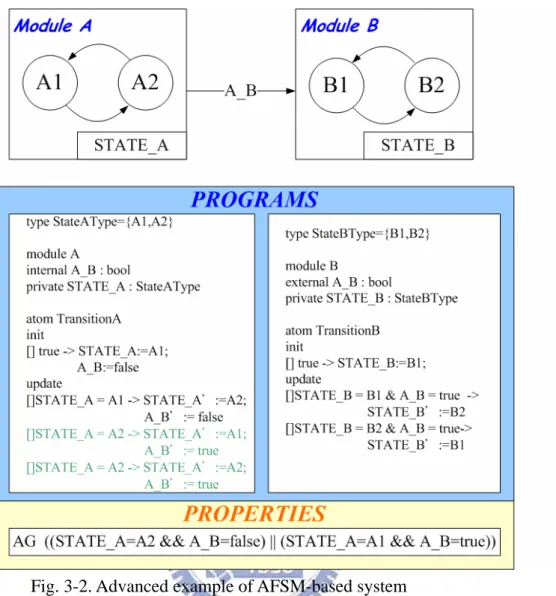
3.1.1.2 Advanced Example
After understanding the simple example of AFSM-based system, let us consider another
advanced example. In the advanced example, transition functions (update commands) are
allowed to include non-deterministic choices. As shown in Fig. 3-2, module A has a
non-deterministic choice as follow:
[]STATE_A = A2 -> STATE_A’:=A1; A_B’:= true []STATE_A = A2 -> STATE_A’:=A2; A_B’:= true
If the variables’ values of module A are { STATE_A=A2 , A_B=Don’t Care } in current
state, the variables’ values of module A may be { STATE_A=A1,A_B=true } or
{ STATE_A=A2,A_B=true } in next state. The sequential state transition of the advanced
AFSM example is listed as Table 3-2. The non-deterministic choices are provided to system
designer for simulating the random situation. In order to make the concept more clearly, we
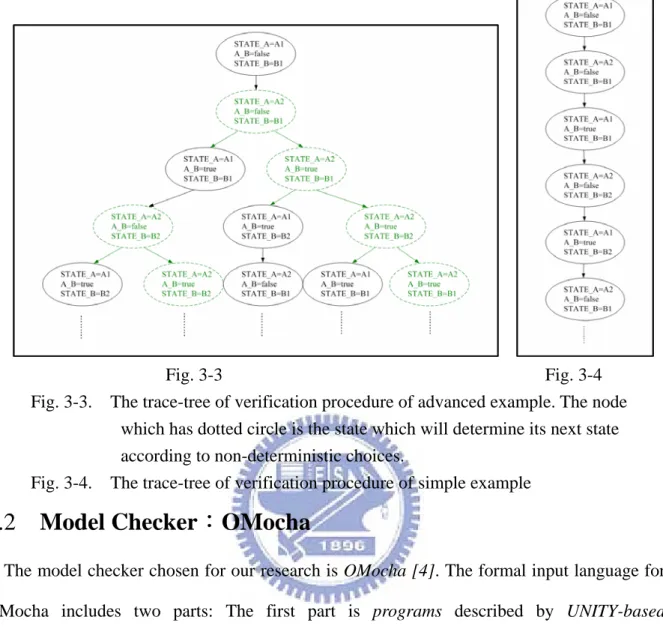
illustrate the trace-tree of verification procedure for the advanced example with Fig. 3-3.
according to the non-deterministic choices. Therefore, the trace-tree of verification procedure
for the advanced example is a multi-branch tree. However, the trace-tree of verification
procedure for the simple AFSM example is a single-branch tree as shown in Fig. 3-4.
Fig. 3-1. Simple example of AFSM-based system
variable state
STATE_A A_B STATE_B
1 A1 False B1 2 A2 False B1 3 A1 True B1 4 A2 False B2 5 A1 True B2 6 A2 False B1 ... ... ... ...
Table. 3-1. Sequential state transition of simple AFSM-based system
initial state
Fig. 3-2. Advanced example of AFSM-based system
variable state
STATE_A A_B STATE_B
1 A1 False B1 2 A2 False B1 3 A1 True B1 4 A2 False B2 5 A1 True B2 6 A2 False B1 7 A2 True B1 8 A1 True B2 9 A2 False B1 … … … …
Table. 3-2. Sequential state transitions of advanced AFSM-based system
initial state
Fig. 3-3 Fig. 3-4
Fig. 3-3. The trace-tree of verification procedure of advanced example. The node which has dotted circle is the state which will determine its next state according to non-deterministic choices.
Fig. 3-4. The trace-tree of verification procedure of simple example
3.2 Model Checker:OMocha
The model checker chosen for our research is OMocha [4]. The formal input language for
OMocha includes two parts: The first part is programs described by UNITY-based
specification language [2], and the second part is properties described by Temporal Logic [5].
After the formal input language is fed into OMocha, OMocha will check whether the
behaviors of the programs satisfy the properties. If the behaviors of the programs violate the
properties, OMocha will show one counterexample. Otherwise, it’ll show the behaviors of the
programs satisfy the properties.
. In Section 3.3, we’ll introduce the formal input language for OMocha.
3.3 Formal Input Language for OMocha
3.3.1 Programs Described by UNITY-based Specification Language
In OMocha, the programs are described by UNITY-based specification language. There are
two main reasons about why it uses UNITY to describe the programs as follows:
(1) UNITY could represent the relationship between current state and next state, what is
called transition function. Therefore, we could describe an AFSM-based RRCS by
UNITY.
(2) In order to operation in coordination with OMocha. In OMocha, the only data types can
be defined are cyclic integer and boolean, and the syntax and semantics of UNITY can
provide cyclic integer ( e.g., “A: bit[5]”, the range of cyclic integer A is from 0 to
31).
(B) Syntax and Semantics
There are two parts in programs:
(1)Module Description
In the first part of programs, we describe all AFSM modules in module description. For
describing a module, it includes two necessary parts: variables definition and atoms
definition.
Variables Definition
In variables definition, there are three kinds of variables can be defined: external, interface,
and private.
External variables---The input ports of AFSM module, they receive data from other AFSM modules’ interface variables.
Interface variables---The output ports of AFSM module, they send data to other AFSM modules’ external variables.
Private variables---The local variables of AFSM module, they don’t connect with other AFSM modules.
Three kinds of data types which can be defined for above three kinds of variables are
“cyclic integer”, “boolean” and “enum”.
Atoms Definition
In atoms definition, we describe the init action executed during initial round, and the
update action executed during each update round. The initial and update action are specified
by the keywords init and update. There are some init commands in initial action, and
there are some update commands in update action. An example for atoms definition is shown
as Fig. 3-6.
Fig. 3-6. Example for atoms definition
In each update round, every variable x has two values. The value of x at the beginning of
updated value. We use unprimed symbols, such as x, to refer to latched values, and primed
symbols, such as x’, to refer to the corresponding updated values.
The updated value of (N-1)th round is equal to the latched value of Nth round. The latched
value of x is also the current state of x, and the updated value of x is also the next state of x.
The relationship between latched value (current state) and updated value (next state) during
neighbor update rounds is shown as Fig. 3-7.
Fig. 3-7. The relationship between latched value and updated value during neighbor
update rounds.
Let us look the example shown in Fig. 3-6, the updated value of STATE and A are init and 1
at initial round. According to the update command in update action, if the latched value of
STATE and A are init and 1, the updated value of them will be set to start and 2. Therefore,
the updated values of STATE and A are start and 2 at 1st update round. Update commands
which determine the relationship between latched values and updated values, can regard as
transition functions which determine relationship between current state and next state.
(2) Module Connection
After all AFSM modules are described in module description, we need to describe the
connection relationship between these AFSM modules. An interface variable can connect with
some external variables of other AFSM modules which have the same name as the interface
variable. An external variable can only connect with an interface variable of another AFSM
3.3.2 Properties Described by Temporal Logic
(A) Introduction
In OMocha, the method chosen to describe the properties of an AFSM-based RRCS is
Temporal Logic.
Temporal Logic is used to represent the properties of state transitions of a system over time
domain. For instance, we want to check whether variable A is always less than 10 during all
possible states. In this case, the representation of Temporal Logic is “AG A<10”, the meaning
of ”AG” is “always true” during all possible states from initial state. After describing the
programs of an AFSM-based RRCS by UNITY, we can describe the properties of the
AFSM-based RRCS by Temporal Logic, and the properties are what we want to check by
OMocha. When OMocha receives the formal input language including programs and
properties, it can check whether the behaviors of the programs satisfy the properties.
(B) Syntax and Semantics
Every property of a system is described by Temporal Logic. A Temporal Logic formula
consists of the propositional logic formula and temporal connectives: The propositional
logic formulas are expressions which consist of logical operators and the variables of the
system. The temporal connectives are expressions to indicate the subset of future states of the
system.
The temporal connectives are pairs of symbols:
The first member of the pair is one of
A - meaning on all paths from the “current” state, read as “inevitably”
E - meaning on at least one path from the ”current” state, read as “possibly”
The second member of the pair is one of
G - meaning all future states, read as “globally”
F - meaning some future state
U - meaning until
Take “mutual exclusion” as example. Suppose we are talking about two processes P1, P2
that share data. The protocol allows only one process to be in its critical section at any time.
If we want to describe the “mutual exclusion” property by Temporal Logic, the Temporal
Logic formula will be described as follow:
AG !( Critical[P1] & Critical[P2] )
The propositional logic formula !( Critical[P1] & Critical[P2])
The temporal connectives AG
This Temporal Logic formula is true iff Critical[P1] and Critical[P2] won’t be
Chapter 4
Model Checking for AFSM-based RRCS,
Approaches
In this Chapter, we present three approaches to lower the difficulty of formal verification
for the experiment. After using the three approaches to reduce the number of states of the
RRCS and environment, formal verification can become applicable for the experiment.
4.1 State Space Discretization
A system described on the continuous domain can’t be verified by OMocha, because the
number of all possible states is infinite. Before constructing an AFSM-based RRCS we must
transform the system and environment from continuous domain to discrete domain. Otherwise,
OMocha can’t handle it.
In discretization procedure, there are two parts. (1) Time Discretization, and (2) Space
Discretization. Time Discretization has been explained in Section 2.1.1.2, therefore we will
only explain Space Discretization in this section. We will give two examples to illustrate the
relationship between continuous space and discrete space below.
Take a simple MAP as first example, the continuous MAP whose size is 2*2 m2 is
transformed into a discrete MAP. In x-axis and y-axis, the continuous domain is partitioned
into 21 points separately (x-axis:0.1.2….20, y-axis:0.1.2….20). Therefore, the distance
between two neighbor points is 0.1m, and the size of the discrete MAP is 21*21. The
Fig. 4-1. (a) continuous MAP (b) discrete MAP
Then, we give another example. In Section 2.2.5, we have mentioned that in the strategy for
avoiding collision, the relationship between “Distance away from the obstacles” and “Reverse
acceleration” is the most important part. In Fig. 4-2, we illustrate the relationship between
continuous domain and discrete domain in this example.
Fig. 4-2 (a) continuous domain (b) discrete domain
In Fig. 4-2, “Reverse acceleration” is approximately linear inverse proportion to “Distance
away from the obstacles” on continuous domain, the curve presents the relationship between
the two parameters. The number of all possible mapping relations of them is infinite, the
mapping set includes { (0, 5)..(0.5,4.5)..(3.5,1.5)..(5,0) }. After transformation, the mapping
set has only fix points on discrete domain, they are { (0,5) . (1,4) . (2,3) . (3,2) . (4,1) . (5,0) }.
After discretization procedure, the complexity of a system will be simplified to the degree
4.2 External Function for Computation/State Hiding
In order to improve the capabilities which the UNITY-based programs can support, and
reduce the number of states of a system. OMocha provides the external function for system
designer. The two main advantages are listed below:
4.2.1
Computation Hiding
The semantics and syntax of UNITY are very basic and aren’t as powerful as high-level
language. For this reason, it’ll be very hard to build complicated programs of a system by
UNITY.
In order to improve the capabilities which the UNITY-based programs can support,
OMocha provides the external function for system designer. The external function is
described by C language. The UNITY which includes external function is called advanced
UNITY.
In original UNITY, the semantics and syntax can only provide basic capabilities, these
basic capabilities include:
Value assignment
Basic logic operations: and/or/not/invert
Basic arithmetic operations: addition/subtraction
Basic comparison operators: > <
Non-nested if-then-else structure
……etc
In advanced UNITY, we can pass variables into external functions, and then receive the
return value of external function by variables which defined in UNITY.
There are two examples for explaining computation hiding through external function. The
Example 1
A part of programs described with original UNITY
The same part described with advanced UNITY
Example 2
A part of programs described with original UNITY
4.2.2
State Hiding:Reducing the Number of All Reachable States of a
System
How complicated a system can be verified by OMocha depends on the number of all
reachable states. Once the number of all reachable states of a system is greater than the
limitation of OMocha’s capability, the “out of memory” problem will occur during checking
procedure. Therefore, we have to carefully control the complexity of a system so that the
resource (memory, CPU speed...etc) of OMocha can handle the checking procedure.
The number of all reachable states of a system depends on the all possible combination of
all variables which are defined in UNITY-based programs. If we can move out some variables
which are defined in UNITY-based programs, and encapsulate them into external function,
the number of all reachable states will reduce.
But, what kinds of variables can be encapsulated into external function ? During
verification procedure, there are some system variables which are irrelevant to behavior
verification. For example, in the experiment explained in Chapter 2, OMocha only needs to
know the velocity and location of the robot whereas it doesn’t need to know the computation
of detecting environment, and determining the degree of acceleration. The variables for
detecting environment and determining the degree of acceleration can be exported to external
function.
An example of the encapsulation procedure of external function is shown as Fig. 4-3. In Fig.
4-3, the system is composed of four AFSM modules. There is one interface variable in each
module, so the total number of the variables in the system is four. According to encapsulation
principle, if a module doesn’t include some nondeterministic update commands, it can be
encapsulated into a external module. Take the system as a example, the module B, module C
and module D can be encapsulated into a external module which invokes a external function
to handle all update commands of them, the encapsulation procedure shown as Fig 4-3(c). The
nondeterministic update command. After encapsulation procedure, the system reduces the
number of modules from 4 to 2, and reduces the number of variables from 4 to 2. The two
interface variables Bout,Cout are encapsulated into the external function “Ext_fun”, so model
checker doesn’t need to consider them. In some cases, reducing the number of variables by
encapsulation procedure can obviously lower the number of all reachable states of the system
Fig. 4-3. Encapsulation procedure
(a) A system is composed of four AFSM modules
(b) The module B, module C and module D can be encapsulated into a external module
(c) The three modules will be integrated into one external module, the UNITY-based programs of the external module and C code of external function Ext_fun() are shown in the figure.
4.3 Elimination of Unnecessary Checking Cases
The concept of verification procedure is step by step to explore all reachable states from
initial state. Therefore this is a kind of method of exhaustion. However, according to the
properties we want to check by OMocha, we can eliminate some unnecessary checking cases,
because this part of checking cases will never violate the properties. Take the experiment
explained in Chapter 2 as example. The robot will never collide with obstacles while it
wanders aimlessly in the range which has no obstacles. Therefore, OMocha can eliminate the
Chapter 5
Implementation of Roving Robot Collision
Avoidance Experiment
In this Chapter, we will present how to construct the AFSM-based RRCS and environment
in the experiment with UNITY, and explain the AFSM-based RRCS in detail.
We have explained the chart of an AFSM module in Section 2.1, and explained how to
describe the programs of an AFSM module has explained in Section 3.3.1. These two sections
are the most important foundations for this section.
In Section 5.1, we will show the full structure of the experiment, and then briefly introduce
these AFSM modules in the experiment. In Section 5.2, we introduce every AFSM module in
detail, and how these AFMS modules connect with other modules and work in coordination.
In Section 5.3, we explain the “No_Collision” property described by Temporal Logic. The
checking results of the experiment are explained in Chapter 6.
5.1 Full Structure of the Experiment
Fig. 5-1 Full structure of the experiment
composed of 6 AFSM modules, and environment is composed of 1 AFSM module. These
modules are listed in Table 5-1:
Module name
Module figure
Functionality
MAP
z Set the position of obstacles and walls into
MAP_walls and MAP_obstacles at initial round.
z Provide the map of environment to other modules through interface variable
SONAR
z In each round, SONAR reads Location_updated from MOTOR module, and then SONAR detects the
environment and produces the robot centered map of
obstacles and walls
z Provide the robot centered map stored in
SMAP_obstacle to FORCE_ACCELERATION
and RANDOM_ACCELERATION modules.
FORCE_ ACCELERATION
z In each round, FORCE_ACCELERATION awaits robot centered map of obstacles from SONAR
module, and then compute
Force_Acceleration for
RESULT_ACCELERATION module
RANDOM_ ACCELERATION
z In each round, If there is no any obstacle in detection range(the updated value of SMAP_obstacle is
{(0,0),LU} ), RANDOM_ACCELERATION module
produces a random Random_Acceleration for
RESULT_ ACCELERATION
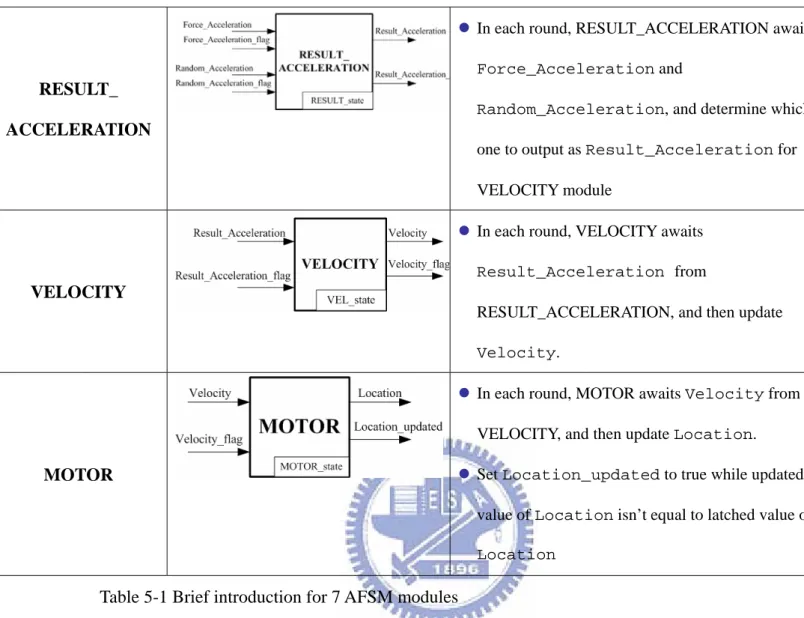
z In each round, RESULT_ACCELERATION awaits Force_Acceleration and
Random_Acceleration, and determine which
one to output as Result_Acceleration for
VELOCITY module
VELOCITY
z In each round, VELOCITY awaits Result_Acceleration from
RESULT_ACCELERATION, and then update
Velocity.
MOTOR
z In each round, MOTOR awaits Velocity from VELOCITY, and then update Location.
z Set Location_updated to true while updated value of Location isn’t equal to latched value of Location
Table 5-1 Brief introduction for 7 AFSM modules
5.2 Introduction for each AFSM Module in detail
1. MAP:
Fig. 5-2 MAP module
z Set the position of obstacles and walls into MAP_walls and MAP_obstacles at initial round.
z Provide the map of environment to other modules through interface variable
The MAP module is for simulating the environment. In MAP module, we set the position of
obstacles and walls in environment map at initial round. The representation of obstacle or wall
is { position , direction }. The position is represented by (position of X-axis ,position of
Y-axis), and the direction includes four kinds of directions, which are
{LU(left-up),LD(left-down),RU(right-up),RD(right-down)}. In Fig. 5-3, we list some examples to illustrate the usage of the representation.
Example of wall
Representation { (8,0),LU/LD } { (34,0),RU/RD } { (0,8),LD/RD } { (0,34),LU/RU }
Example of obstacle
Representation { (12,30) , LU } { (12,12) , LD } { (30,12) , RD } { (30,30) , RU } Fig. 5-3 Some examples for the representation of MAP_obstacle/MAP_wall
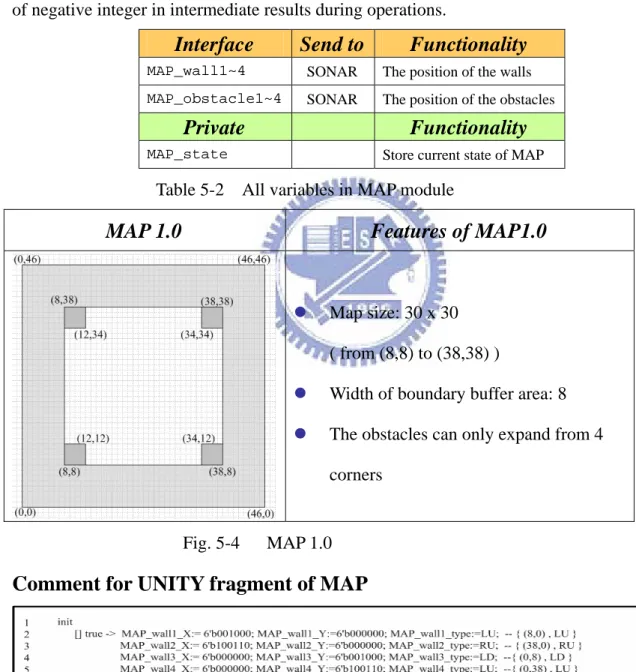
Take the MAP1.0 shown in Fig. 5-4 as example of environment. The position of walls are
{ (8,0)} , LU } , { (38,0), RU } , { (0,8) , LD } , { (0,38) , RU }, and the position of obstacles
are { (12,12) ,LD },{ (34,12) , RD },{ (12,34) , LU },{ (34,34) , RU }. According to the
representation, we can set the values of MAP_obstacles and MAP_walls. The interface
variables MAP_obstacles and MAP_walls will be sent to SONAR module.
variables MAP_obstacle1-4 and MAP_wall1-4 will connect to SONAR module for
informing the map of environment.
The figure and features of MAP1.0 is shown as Fig 5-4. The MAP 1.0 is very simple. It is a
two-dimensional square whose size is 30*30, and the obstacles can only expand from 4
corners. Because there is only “unsigned ranged integer” data type in OMocha, we reserve the
boundary buffer area around the environment. The reason is in order to avoid the appearance
of negative integer in intermediate results during operations.
Interface
Send to
Functionality
MAP_wall1~4 SONAR The position of the walls MAP_obstacle1~4 SONAR The position of the obstacles
Private
Functionality
MAP_state Store current state of MAP
Table 5-2 All variables in MAP module
MAP 1.0
Features of MAP1.0
z Map size: 30 x 30 ( from (8,8) to (38,38) )
z Width of boundary buffer area: 8
z The obstacles can only expand from 4 corners
Fig. 5-4 MAP 1.0
Comment for UNITY fragment of MAP
In the UNITY fragment of MAP shown as Fig. 5-5, we set position of walls and obstacles
into MAP_obstacles and MAP_walls.
Line 1: The initial action of atoms is specified by the keywords init.
Line 2-9: Set the value of MAP_obstacles and MAP_walls.
Line 4: The position of MAP_wall3 is (0, 8), and the direction is LD.
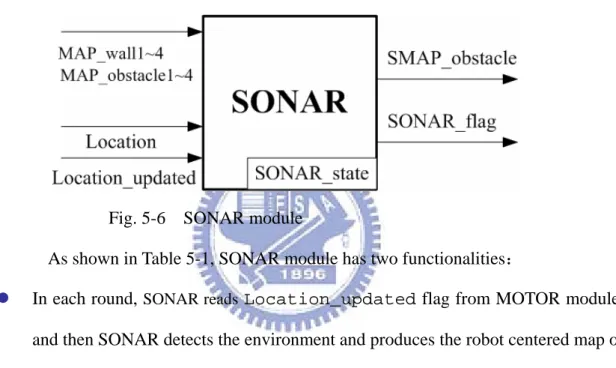
2. SONAR:
Fig. 5-6 SONAR module
As shown in Table 5-1, SONAR module has two functionalities:
z In each round, SONAR reads Location_updated flag from MOTOR module, and then SONAR detects the environment and produces the robot centered map of
obstacles and walls
z Provide the robot centered map stored in SMAP_obstacle to
FORCE_ACCELERATION and RANDOM_ACCELERATION modules.
SONAR module is the module to simulate the behavior of sonar sensor on the robot. It receives the map of environment from MAP module and location of robot from MOTOR module. After receiving above external variables from MAP and MOTOR module, SONAR module will produce a robot centered map of obstacles and walls according to the detection range of sonar sensor. The detection range of sonar sensor is a robot centered range whose size is 16x16, and for every quadrant the size is 8x8. The figure of detection range is shown as Fig. 5-7.
Fig. 5-7 Detection range
The information of the robot centered map of obstacles and walls is stored in the interface
variable SMAP_obstacle, and the SMAP_obstacle will be sent to
FORCE_ACCELERATION and RANDOM_ACCELERATION modules.
The representation of SMAP_obstacle is { distance ,direction }, the distance in the
representation are represented with the distance away from the obstacle or wall for X-axis and
Y-axis separately. In Fig. 5-8, we list some examples to illustrate the usage of the
representation for SMAP_obstacle.
Example
representation {(4,5),RU} {(2,3),LD} {(0,5),LD/RD} {(6,0),LU/LD}
Fig. 5-8. Some examples for the representation of SMAP_obstacle
The introduction for all variables in SONAR module is shown in Table 5-3. In each round,
SONAR module reads MAP_obstacle1-4 and MAP_wall1-4 from MAP, and reads Example
Location and Location_updated from MOTOR, and then it updates the updated
value of SMAP_obstacle and SONAR_flag. The interface SMAP_obstacle and
SONAR_flag connect to FORCE_ACCELERATION and RANDOM_ACCELERATION
modules for informing the robot centered map of obstacles and walls. The private variable
SONAR_state is for storing the state of SONAR module.
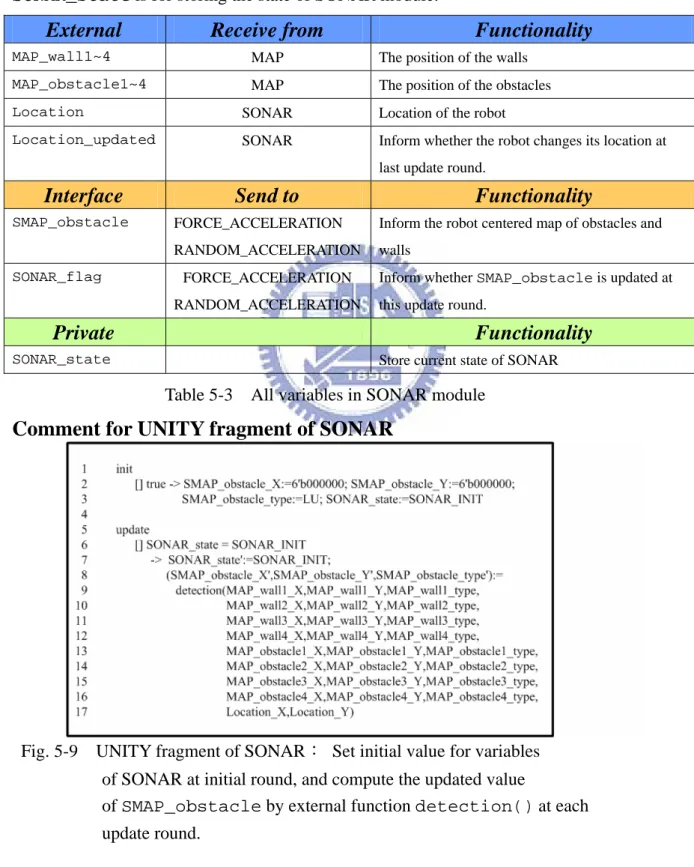
External
Receive from
Functionality
MAP_wall1~4 MAP The position of the walls MAP_obstacle1~4 MAP The position of the obstacles Location SONAR Location of the robot
Location_updated SONAR Inform whether the robot changes its location at last update round.
Interface
Send to
Functionality
SMAP_obstacle FORCE_ACCELERATION RANDOM_ACCELERATION
Inform the robot centered map of obstacles and walls
SONAR_flag FORCE_ACCELERATION RANDOM_ACCELERATION
Inform whether SMAP_obstacle is updated at this update round.
Private
Functionality
SONAR_state Store current state of SONAR
Table 5-3 All variables in SONAR module
Comment for UNITY fragment of SONAR
Fig. 5-9 UNITY fragment of SONAR: Set initial value for variables of SONAR at initial round, and compute the updated value
of SMAP_obstacle by external function detection() at each update round.
In the UNITY fragment of SONAR shown as Fig. 5-9, we set initial value for variables of SONAR at initial round, and compute the updated value of SMAP_obstacle by external function detection() at each update round. Because the strategy of computing
SMAP_obstacle is too complicated to write by UNITY code, we implement the strategy by external function detection().
Line 2-3: Set initial value for SMAP_obstacle
Line 5: The update action of atoms is specified by the keywords update.
Line 6: In this update rule, if latched value of SONAR_state is SONAR_INIT, Line7-17
will be executed.
Line 7: The updated value of SONAR_state is updated to SONAR_INIT
Line 8-17: The updated value of SMAP_obstacle is computed by external function
detection()
Fig. 5-10 Fragment of external function detection()
Line 1-9: detection() receives MAP_walls,MAP_obstacles and Location as parameters
Line 11: Declare local variable SMAP_obstacle.
Line 15-19: Check whether MAP_wall1 (direction:LU/RU) is in the detection range. If it’s true, SMAP_obstacle_Y will be set to “MAP_wall1_Y - Location_Y” and SMAP_obstacle_type will be set to “LU”.
Line 24: Return the value of local variable SMAP_obstacle. The return value will be assigned to interface variable SMAP_obstacle in SONAR module.
Example
If ( MAP_wall1_X=0, MAP_wall1_Y=8, MAP_wall1_type=LU,
Location_X=18, Location_Y=6)
Then (SMAP_obstacle_X=0, SMAP_obstacle_Y=2, SMAP_obstacle_type=LU)
3. FORCE_ACCELERATION:
Fig. 5-11 FORCE_ACCELERATION module
As shown in Table 5-1, FORCE_ACCELERATION module has one functionality:
z In each round, FORCE_ACCELERATION awaits robot centered map of obstacles from SONAR module, and compute the Force_Acceleration for
RESULT_ACCELERATION module
In FORCE_ACCELERATION module, it receives SMAP_obstacle from SONAR
module, and then produces the “reverse acceleration” according to the strategy for avoiding
colliding with obstacles, the result of “reverse acceleration” is stored in interface variable
Force_Acceleration. The relationship between“distance of X-axis away from the
obstacle in SMAP_obstacle” and “X-axis component of reverse acceleration degree in
Force_Acceleration” is shown as Table 5-4.
Distance of X-axis away from
the obstacle in SMAP_obstacle 0 1 2 3 4 5 6 7 X-axis component of reverse acceleration
Degree in Force_Acceleration 0 2 2 2 1 1 1 1
Table 5-4 The relationship between “Distance of X-axis away from the obstacle in SMAP_obstacle” and “X-axis component of reverse acceleration degree in Force_Acceleration”. Take X-axis for instance, the situation of Y-axis is equivalent to X-axis
The representation of Force_Acceleration is { A-degree ,direction }, the A-degree is
represented by (degree of X-axis component,degree of Y-axis component), and the range of
A-degree is from 0 to 2; the direction is reverse to the direction of SMAP_obstacle. We list some examples to illustrate the relationship between SMAP_obstacle and
Force_Acceleration in Fig. 5-12.
Example
SMAP_obstacle {(4,5),RU} {(2,3),LD} {(0,5),LD/RD} {(6,0),LU/LD}
Force_Acceleration {(1,1),LD} {(2,2),RU} {(0,1),RU/LU} {(1,0),RD/RU}
Example
SMAP_obstacle {(0,5),RU} {(6,5),LD} {(4,4),RU} {(4,5),LD}
Force_Acceleration {(0,1),LD} {(1,1),RU} {(1,1),LD} {(1,1),RU} Fig. 5-12 Some examples of the relationship between SMAP_obstacle and
Force_Acceleration
The introduction for all variables in FORCE_ACCELERATION module is shown as
Table 5-5. FORCE_ACCELERATION awaits SMAP_obstacle from SONAR module, and
then updates the updated value of Force_Acceleration. The interface
Force_Acceleration and Force_Acceleration_flag connect to
RESULT_ACCELERATION module for informing force acceleration.
External
Receive from
Functionality
SMAP_obstacle SONAR The robot centered map of obstacles and walls
updated at this update round
Interface
Send to
Functionality
Force_Acceleration RESULT_ACCELERATION Inform the force acceleration for RESULT_ACCELERATION.
Force_Acceleration_flag RESULT_ACCELERATION Inform whether the updated value of degree of Force_Acceleration is non-zero at this update round. It is set true while the updated value of degree of
Force_Acceleration is not (0,0).
Private
Functionality
FORCE_state Store current state of
FORCE_ACCELERATION
Table 5-5 All variables in FORCE_ACCLERATION module
Comment for UNITY fragment of FORCE_ACCELERATION
Fig. 5-13 UNITY fragment of FORCE_ACCELERATION:
Set initial value for variables of FORCE_ACCELERATION at initial round,
and compute the updated value of Force_Acceleration by external
function SMAP_to_FORCE() at each update round.
Line 2-3:Set initial value for FORCE_ACCELERATION
Line 6-7:The updated value of Force_Acceleration is computed by
Fig. 5-14 Fragment of external function SMAP_to_FORCE()
Line 1: SMAP_to_FORCE() receives SONAR_flag and SMAP_obstacle as
parameters
Line 3: Declare local variable Force_Acceleration.
Line 8-18: If SONAR_flag is true, we set the value of Force_Acceleration_X
according to relationship shown in Table 5-4.
Line 25-31: If SONAR_flag is true, we set the value of Force_Acceleration_type
according to relationship shown in Fig. 5-12.
Line 35:Return the value of local variable Force_Acceleration. The return
value will be assigned to interface variable Force_Acceleration
4. RANDOM_ACCELERATION:
Fig. 5-15 RANDOM_ACCELERATION module
As shown in Table 5-1, RANDOM_ACCELERATION module has one functionality:
z In each round, if there is no any obstacle in detection range (the updated value of SMAP_obstacle is { (0,0) , LU) ), RANDOM_ACCELERATION module produces a
random Random_Acceleration for RESULT_ACCELERATION module.
In RANDOM_ACCELERATION module, it awaits SMAP_obstacle from SONAR
module. If there is no obstacle in detection range (the updated value of
SMAP_obstacle is {(0,0) , LU} ), RANDOM_ACCELERATION module will produce
a random acceleration for the robot. The robot can wander aimlessly by changing its
velocity according to the random acceleration. The random acceleration which produced
by RANDOM_ACCELERATION is stored in interface variable
Random_Acceleration, and then Random_Acceleration will be sent to
RESULT_ACCELERATION module.
The representation of Random_Acceleration is {A-degree ,direction }, the
A-degree is represented by (degree of X-axis component, degree of Y-axis component), and the range of A-degree is from 0 to 2; the direction is one of { LU,LD,RU,RD }. We
list some examples of the relationship between SMAP_obstacle and
Random_Acceleration in Fig. 5-16.
Table 5-6. In each round, RANDOM_ACCELERATION awaits SMAP_obstacle from
SONAR module, and updates the updated value of Random_Acceleration and
Random_Acceleration_flag. The interface Random_Acceleration and
Random_Acceleration_flag connect to RESULT_ACCELERATION modules for
informing the random acceleration.
Example
SMAP_obstacle {(0,0),LU} {(0,0),LU} {(0,0),LU} Not {(0,0),LU}
Random_Acceleration {(2,2),RU} {(2,1),RD} {(1,2),LD} {(0,0),LU} Fig. 5-16 Some examples of the relationship between SMAP_obstacle and
Random_Acceleration
External
Receive from
Functionality
SMAP_obstacle SONAR The robot centered map of obstacles and walls SMAP_obstacle_flag SONAR Inform whether SMAP_obstacle is updated
at this update round
Interface
Send to
Functionality
Random_Acceleration RESULT_ACCELERATION Inform the random acceleration for RESULT_ACCELERATION
Random_Acceleration_flag RESULT_ACCELERATION Inform whether the updated value of degree of Random_Acceleration is non-zero at this update round. It is set true while the updated value of the degree of
Random_Acceleration is not (0,0).
Private
Functionality
RANDOM_state Store current state of
RANDOM_ACCELERATION
Comment for UNITY fragment of RANDOM_ACCELERATION
Fig. 5-17 UNITY fragment of RANDOM_ACCELERATION:
Set the initial value for variables of RANDOM_ACCELERATION at initial round, and update the updated value of Random_Acceleration_X at each update round.
Line 2: Set initial value for RANDOM_ACCELERATION
Line 4-6 : If (SMAP_obstacle_X,SMAP_obstacle_Y) is (0,0), the value of
Random_Acceleration_X will randomly be set to one of {0,1,2}
Line 7:If one of SMAP_obstacle_X and SMAP_obstacle_Y is not 0, the value of
Random_Acceleration_X will be set to 0.
5. RESULT_ACCELERATION:
Fig. 5-18 RESULT_ACCELERATION module
As shown in Table 5-1, RESULT_ACCELERATION module has one functionality:
z In each round, RESULT_ACCELERATION awaits Force_Acceleration and Random_Acceleration, and then determine which one to output as
Result_Acceleration for VELOCITY module
Random_Acceleration, and then determines which one to output as
Result_Accleration for VELOCITY module. The strategy for making the decision is
listed below:
A. Force_Acceleration_flag==true&&Random_Acceleration_flag==false/
trueÆ Result_Acceleration = Force_Acceleration
B. Force_Acceleration_flag==false&&Random_Acceleration_flag==true
Æ Result_Acceleration = Random_Acceleration
C. Force_Acceleration_flag==false&&Random_Acceleration_flag==false
ÆResult_Acceleration = { (0,0) , LU }
The strategy includes three conditions:
A. If Force_Acceleration_flag is true, Force_Acceleration will be stored in
Result_Acceleration.
B. If Force_Acceleration_flag is false and Random_Acceleration_flag is
true, Random_Acceleration will be stored in Result_Acceleration.
C. If Force_Acceleration_flag and Random_Acceleration_flag are both
false, Result_Acceleration will be set to { (0,0) , LU }.
The strategy will make the robot avoid collision while there are some obstacles in detection
range ,and wander aimlessly while there is no obstacle in detection range.
The introduction for all variables in RESULT_ACCELERATION module is shown in
Table 5-7. RESULT_ACCELERATION awaits Force_Acceleration from FORCE_-
ACCELERATION and Random_Acceleration from RANDOM_ACCELERATION,
and then updates the updated value of Result_Acceleration. The interface
Result_Acceleration and Result_Acceleration_flag connect to VELOCITY