國
立
交
通
大
學
電控工程研究所
碩
士
論
文
雙饋式風力發電機之運行與控制
Control of Doubly-Fed Induction Generator for
Wind Power Generation
研 究 生: 周建宏
指導教授: 林清安 教授
雙饋式風力發電機之運行與控制
Control of Doubly-Fed Induction Generator for
Wind Power Generation
研 究 生:周建宏 Student:Chien-Hung Chou
指導教授:林清安 Advisor:Prof. Ching-An Lin
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical and Control Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering June 2013
Hsinchu, Taiwan, Republic of China
i
雙饋式風力發電機之運行與控制
學生:周建宏 指導教授:林清安 教授 國立交通大學電控工程研究所 中文摘要 在本論文內,我們將針對電網電壓驟降對雙饋感應發電機(DFIG)的影響作 分析,暫態下的過電流在沒有適當的控制或保護的系統中會損壞電力電子元件, 因此,有必要在系統中使用保護裝置並研究其控制,現今發電機系統通常使用 Crowbars 來避免過電流通過轉換器,雖然此方法在電壓驟降下確實能有效運作, 但如果電壓波動頻繁,那麼過多的開關切換將會導致功率追蹤效率的低落與控制 的困難 因此本論文的目的是對輕微三相電壓驟降下的控制架構進行改良,當故障發 生時,使系統可以保持與電網連接,模擬乃利用 Matlab / Simulink 建立所需的 模型,並使用感應發電機和機械風機的數學方程式,針對不同的轉子速度下(次 同步和超同步)三相電壓驟降分別進行測試,以觀察在故障時系統的響應,並且 在最後分析其結果ii
Doubly-Fed Induction Generator for
Wind Power Generation
Student: Chien-Hung Chou Advisor: Prof. Ching-An Lin
Institute of Electrical and Control Engineering National Chiao Tung University
Abstract
In this thesis, we analysised the impact of grid voltage sags on Doubly-Fed Induction Generator(DFIG). The over current in transient state will cause damage to power electronic devices without proper control or protection. Therefore, it is necessary to use the protection units and study the control. Nowadays, the generator system usually use the Crowbars to avoid over current pass through converters. Although it can properly work during voltage dips, but, if voltage fluctuations are frequent, excessive switching will cause control difficulties and ineffieicney in power tracking.
The purpose of the thesis is to improve control scheme under lightly three phase voltage dip. System can keep connected to grid during fault occurred. Simulation was buid in Matlab/Simulink, using an induction generator and mechanical turbine math model. Different rotor speed(sub-synchronous and super-synchronous) are tested to observe system responses in three phase voltage faults, and the result are analysed at last.
iii
誌謝
首先我想感謝林清安老師在碩士班的兩年內一路的指導和幫助,不僅在遇到 問題時能給出有效的提點,同時讓也我了解研究的態度與看待問題的方法,接著 要謝謝實驗室裡的學長、同學與學弟們一路的相伴,在修課與實驗室的生活內, 相互的鼓勵與幫助,我想是我們一路走來的一大助力;另外還要感謝分隔各地, 卻沒有因此失了聯繫的工科、醫服朋友們,有時候單純的談天與聚會都是研究生 活中重要的一抹色彩;最後我要感謝一直以來默默支持我的家人們,有了你們的 陪伴,我才能毫無後顧之憂平穩走至現在,僅以此論文獻給我親愛的爸、媽、弟 弟與家人朋友們,以及我永遠敬愛的奶奶。iv
目錄
中文摘要 i 英文摘要 ii 誌謝 iii 目錄 iv 表目錄 vi 圖目錄 vii 符號表 x 一、緒論 1 1.1 研究目標 1 1.2 風電發展概況與雙饋式發電機簡介 1 1.3 功率傳導關係 3 二、風機系統介紹 7 2.1 風機特性 7 2.2 機械模型 12 2.3 最大功率追蹤 13 2.4 三相電機模型 15 2.5 參考框理論 20 2.6 dq 兩相旋轉座標模型 22 三、轉子側控制策略 26 3.1 定子磁通量導向控制 26 3.1.1 導向控制方法 26 3.1.2 內部迴路控制 30 3.1.3 外部迴路控制 31 3.2 改良 PI 控制 33v 3.3簡化模型控制 36 3.3.1簡化模型結構介紹 36 3.3.2內部迴路暫態分析 41 3.4 暫態響應之改良 44 3.4.1 諧振控制器介紹 44 3.4.2 暫態設計對外部迴路之影響 46 四、系統模擬結果 49 4.1 轉換器電壓限制 49 4.2 正常運作條件下之模擬結果 54 4.3 電網三相電壓下降之系統響應 56 4.3.1 輕度驟降下超同步轉速模擬 56 4.3.2 輕度驟降下次同步轉速模擬 63 4.3.3 40%驟降下控制方法之比較 68 五、結論 70 參考資料 71 附錄 A 74 附錄 B 79
vi
表目錄
表 2.1:常見之參考座標軸 22 表 B.1:系統使用之參數值 79
vii
圖目錄
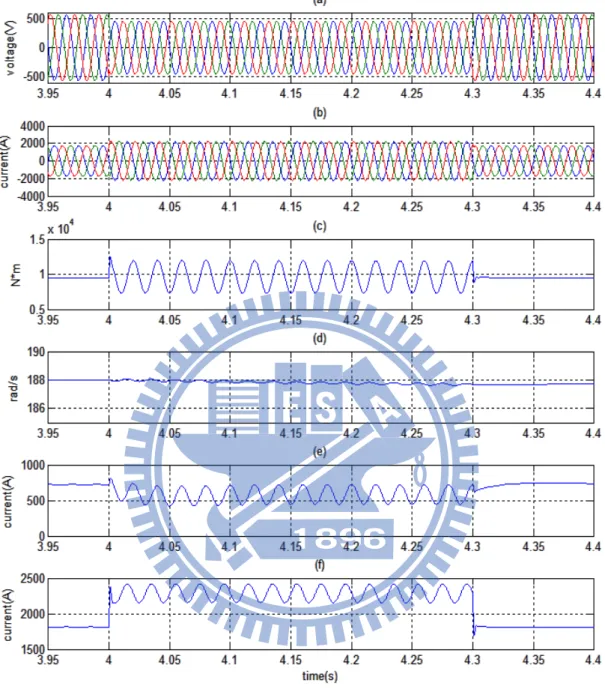
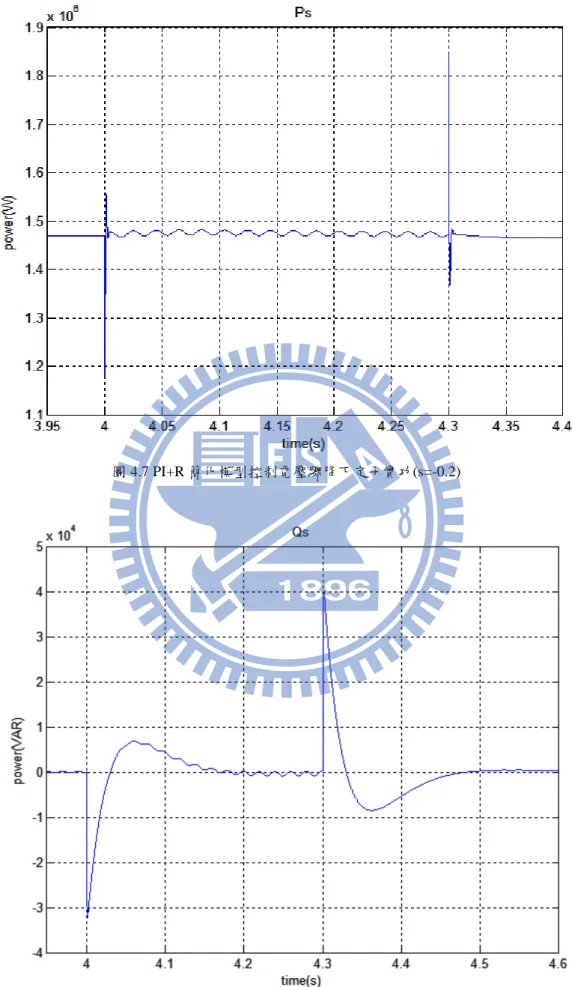
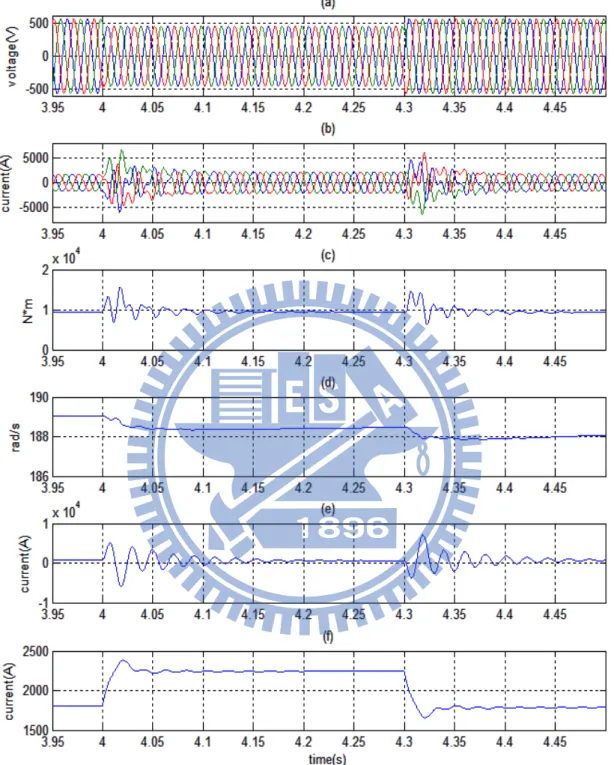
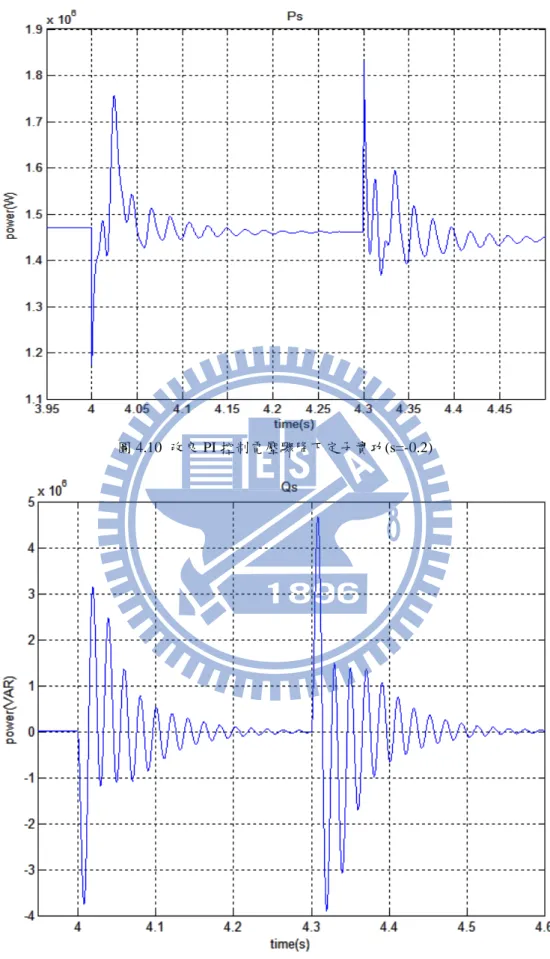
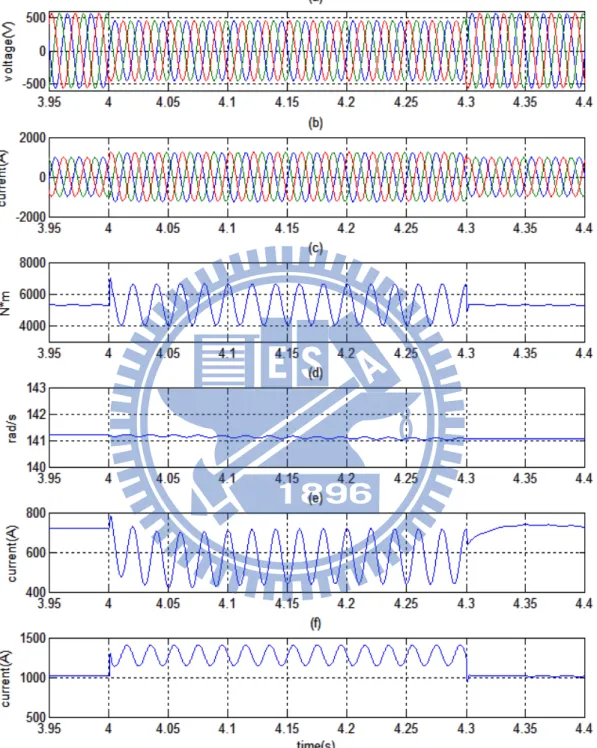
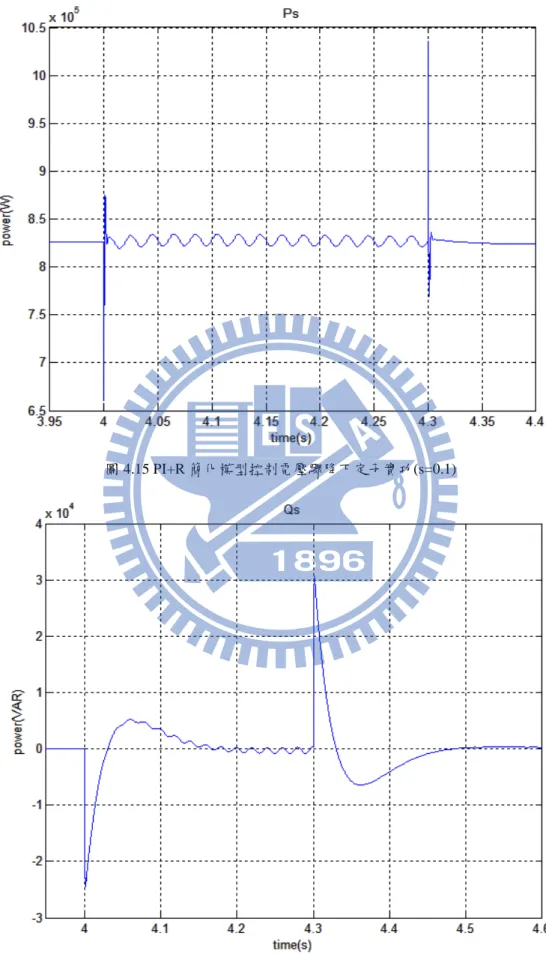
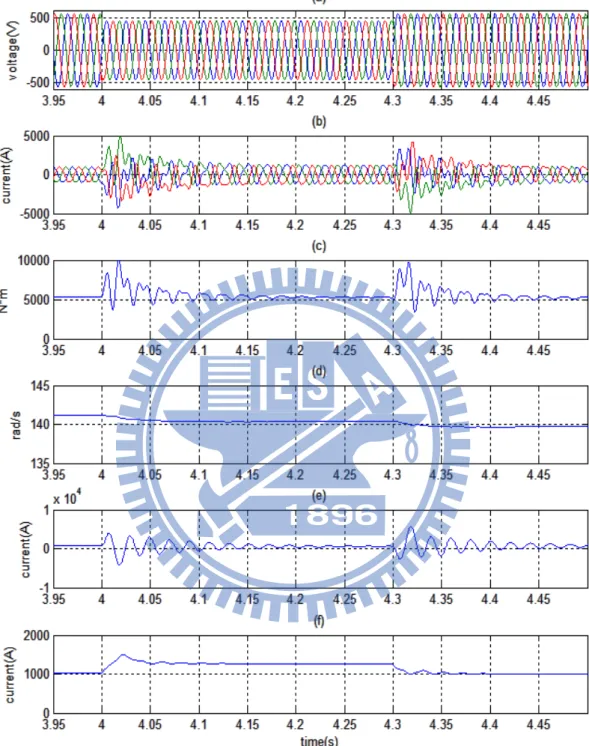
圖 1.1:近幾年來風力發電的設置量 1 圖 1.2:全球風電累計與新增之趨勢 1 圖 1.3:DFIG 系統結構圖 2 圖 1.4:次同步運行狀態圖 4 圖 1.5:同步運行狀態圖 4 圖 1.6:超同步運行狀態圖 5 圖 2.1:風速經葉片前後之變化 7 圖 2.2:功率因數於不同角度下之變化 8 圖 2.3:不同轉速下發電機之工作區域 9 圖 2.4:不同風速下之工作區域 9 圖 2.5:風機機械示意圖 11 圖 2.6:最佳功率吸收點 12 圖 2.7:最佳功率點上轉速-功率曲線圖 13 圖 2.8:理想三相電機模型圖 14 圖 2.9:發電機三相繞阻圖 16 圖 2.10:定轉子間繞組角度差 16 圖 2.11:三相旋轉座標與 dq 旋轉座標之關係圖 20 圖 3.1:dq 軸解耦控制方塊圖 29 圖 3.2:內部迴路控制結構圖 30 圖 3.3:外部控制器之輸出 32 圖 3.4:參考座標軸之導向圖 36 圖 3.5:簡化模型與完整模型之電壓驟降暫態電流比較 38 圖 3.6:實功率控制迴路圖 40 圖 3.7:虛功率控制迴路圖 40viii 圖 3.8:G�(s)��之波德圖 41 圖 3.9:外部補償的控制切換圖 44 圖 3.10:P 與 PI 對正弦訊號的增益輸出圖 44 圖 3.11:諧振調節器之波德圖 45 圖 4.1:20%電壓跌落下轉差率 s 為-0.2 之轉子電壓變化圖 52 圖 4.2:20%電壓跌落下轉差率 s 為 0.1 之轉子電壓變化圖 52 圖 4.3:不同程度之電壓跌落與轉差率間的轉子電壓關係 53 圖 4.4:定子實功功率與其控制參考點 54 圖 4.5:風速在 4s 處由 8.6(m/s)上升至 10.6(m/s 55 圖 4.6:PI+R 簡化模型控制在電壓驟降下之系統響應(s=-0.2) 57 圖 4.7:PI+R 簡化模型控制電壓驟降下定子實功(s=-0.2) 58 圖 4.8:PI+R 簡化模型控制電壓驟降下定子虛功(s=-0.2) 58 圖 4.9:改良 PI 控制在電壓驟降下之系統響應(s=-0.2) 59 圖 4.10:改良 PI 控制電壓驟降下定子實功(s=-0.2) 60 圖 4.11:改良 PI 控制電壓驟降下定子虛功(s=-0.2) 60 圖 4.12:PI+R 簡化模型控制之轉子電壓、電流變化(s=-0.2) 61 圖 4.13:改良 PI 控制之轉子電壓、電流變化(s=-0.2) 61 圖 4.14:PI+R 簡化模型控制在電壓驟降下之系統響應(s=0.1) 63 圖 4.15:PI+R 簡化模型控制電壓驟降下定子實功(s=0.1) 64 圖 4.16:PI+R 簡化模型控制電壓驟降下定子虛功(s=0.1) 64 圖 4.17:改良 PI 控制在電壓驟降下之系統響應(s=0.1) 65 圖 4.18:改良 PI 控制電壓驟降下定子實功(s=0.1) 66 圖 4.19:改良 PI 控制電壓驟降下定子虛功(s=0.1) 66 圖 4.20:PI+R 簡化模型控制之轉子電壓、電流變化(s=0.1 67 圖 4.21:改良 PI 控制之轉子電壓、電流變化(s=0.1) 67
ix
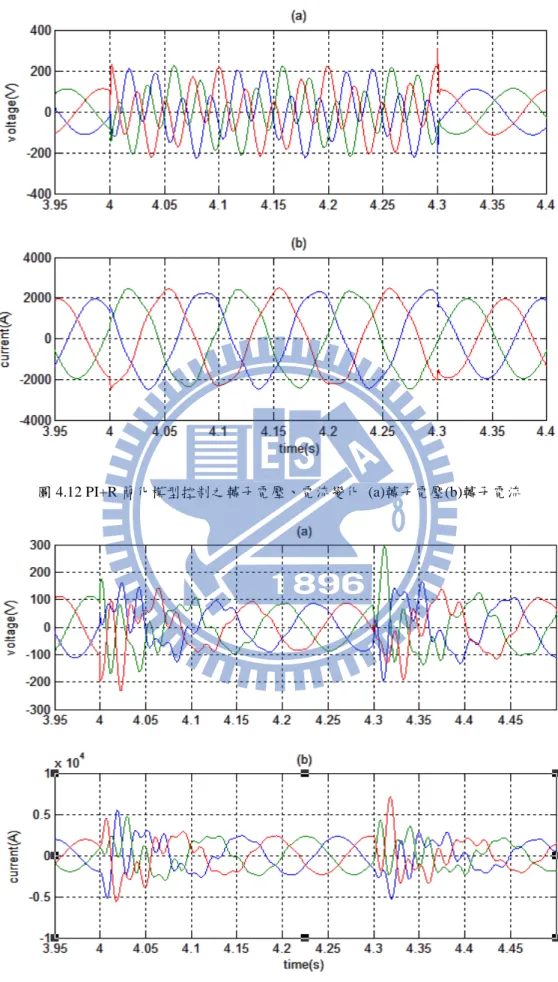
圖 4.22:PI+R 簡化模型控制之轉子電壓、電流變化 68
圖 4.23:改良 PI 控制之轉子電壓、電流變化 69
圖 A.1:粒子移動示意圖 75
x
符號表
V:風速 ρ:空氣密度 R:葉片半徑 β:葉片旋角 c�~�:功率轉換係數之常數 ω�:風機高速軸轉速 ω�: 風機低速軸轉速 R�:定子電組 R�:轉子轉換後之電阻 L��:定子互感 Lℓ�:定子漏感 L��:轉子互感 Lℓ�:轉子漏感 L��:定轉子間互感 ω�:電網頻率 ω�:轉子磁場轉速 u��、u��、u��:定子三向電壓 u��、u��、u��:轉子三向電壓 i��、i��、i��:定子三向電流 i��、i��、i��:轉子三向電流 u��、u��:同步旋轉參考框下dq 定子兩向電壓 u��、u��:同步旋轉參考框之dq 轉子兩向電壓 i��、i��:同步旋轉參考框下dq 定子兩向電流xi i��、i��:同步旋轉參考框下dq 轉子兩向電流 p:微分符號 P�:定子實功功率 P�:轉子實功功率 Q�:定子虛功功率 Q�:轉子虛功功率 P�:機械端輸入風能
1
一、
緒論
1.1 研究目標
在現今的風力發電中,由於功率的上升,以往在小功率系統與電網的連結內 可被忽略的許多問題便需重新考慮,而本論文中將針對電網短路等故障造成的電 壓驟降問題作詳細的分析與探討,電壓的驟降將造成轉子側過電流的產生造成轉 換器電子電路的損毀;同時定子電流產生大幅度波動,造成轉矩的變化使葉片系 統產生不良的轉速擺動,功率輸出也隨之失衡[1]。 目前對風機系統的低電壓運行與電壓驟降解決方案,乃是使用轉子側的保護 裝置(Crowbar),其原理乃是利用電路的短路效果消除轉子轉換器電流的存在, 在驟降發生時,將轉子側三相電路相互並聯同時與接地端相連,使轉換器與電流 隔絕,對過電流的保護起到很好的作用[2]。 但使用 Crowbar 裝置也存在其缺點[3],由於此時風機缺乏轉子側控制,運 行將成為一般電動機的型態工作,需從電網吸收大量虛功,同時定子電流下降, 功率輸出跟著快速衰減。 因此本論文將針對電壓驟降下的控制作相對應的改良,提高風機在轉換器容 量限制下,對驟降造成的暫態響應的忍受程度,尤其在轉子側過電流方面,更是 需要良好的抑制,希望實現輕度電壓故障時風機併網的功率追蹤控制。1.2 風電發展概況與雙饋式發電機簡介
過去數十年間,為取代傳統汙染性較高的能源,風力發電的急遽的發展,直 至 2011 為止全球累計的風力發電量達到 237669MW,且每年都以數萬 MW 的速 度上升,其中歐洲、美國、中國大陸等地乃現今風能發展的主要地區,可由2 圖 1.2 全球風電累計與新增之趨勢[19] 圖 1.1 與 1.2 中看到,目前成本的逐漸下降,使機組設置的速度越發上升,可以 樂觀的預測未來風力發電將更加蓬勃發展。 而風力機容量不斷的上升及技術的進步,使得風機可鋪設的範圍擴大,近年 來更開始出現離岸式風場的設立,由於海洋上的季風時間穩定且無地形上的影 響,是地球上風力的主要集中處,未來若能克服長距離輸電的損耗與海水造成的 機組腐蝕,想必對風力發電量的能有更顯著的提高。 歐洲 北美 亞洲 中南美洲 非洲與中東 大洋洲 圖 1.1 近幾年來風力發電的設置量[19]
3 在發電機的選用上,現今常採用雙饋式感應發電機(Doubly-Fed Induction Generator, DFIG),其系統如圖 1.3 圖 1.3 DFIG 系統結構圖 除了基本的風機與電動機裝置外,其特點在於轉子端加入轉子側與電網側變換器, 為了確保正常的運行,當風速或轉速產生變化時,需要對變換器設計控制,以輸 出所需的轉子勵磁電流,維持定子輸出頻率的恆定,但由於系統轉差率的限制約 在 0.3~-0.3 之間,所以轉子側可控制的功率最高只有額定功率的 30%。 因此可以知道 DFIG 相較於一般的永磁式發電機需要複雜的控制,且由於定 子端直接連至電網,使得機組對電網側的變動十分敏感,同時轉換器功率的限制 使保護裝置(Crowbar)的使用為必要,相較於永磁式擁有許多缺點。 但現今之主流不為永磁式發電機之原因乃其成本過高,由於大型磁鐵之造價 極高且有消磁的風險,轉換器接至定子雖可有效隔離電網與機組間的影響,但也 使得容量上升、造價跟著提高,這些原因使得較為便宜的 DFIG 成為現今市場的 主流,因此現今風機的研究大部分圍繞其穩定性與併網等問題。
1.3 功率傳導關係
在對 DFIG 做細部介紹之前,為了解感應電動機的功率傳導,必須先對定轉4 子間的頻率關係做基本的介紹,理想感應電動機的磁場轉速與電網頻率之關係[5] 如式(1.1) n� = ωn� � (1.1) P為極對數;ω� 為電網頻率(rad/s);n� 為定子磁場旋轉速度(rad/s) 另外在感應電動機裡,轉子物理轉速 ω� 與定子磁場轉速同樣影響了電動 機的磁通量,為方便描述其關係,定義轉差速度(slip speed)為 n����= n�− ω�; 轉差率(slip rate)為 s =���ω� �� ,兩者分別代表定子磁場轉速超出轉子機械轉速的 值;及轉差速度佔定子磁場轉速的比例,且轉子頻率實際運轉下將與轉差速率成 正比,因此代入轉差率之定義可得 n���� n� = s n� n� ω����= sω� = ω�− ω� (1.2) ω���� 即代表轉子電壓與電流的頻率,由於電壓與電流均會受轉差率影響,很明 顯的定轉子間的實功率同樣會受到轉差率的影響,可定義如下的關係 P� ≈ |s|P� (1.3) 而在實功內除了 P��、P�� 定子與轉子電磁功率外,必須將電路的損耗成分 加入,分別定義 P��� 為定子側電路損耗、P���為轉子側電路損耗,如式(1.4)、(1.5) P�= P��+ P��� (1.4) P� = P��+ P��� (1.5) 由於發電機的功率傳導方向,可隨使用者之表示而改變正負,在此定義 P�、P� 向 電網端作功為正,吸收功為負;P�= P� 皆代表進入的風能,向電動機作功為正, 電動機向葉片作功為負,針對不同轉速下的發電機運作,可以分為以下三種。 在次同步運行時 s > 0,此時轉子功率對電動機作功,外部的風能小於定子
5 功率 圖 1.4 次同步運行狀態圖 P� = P�− P�− P���− P��� ≅ (1 − |s|)P� (1.6) 在同步運行時 s = 0,此狀態下轉子隨定子電網頻率同步轉動,轉子功率幾乎為 零,也因此外部的風能將等於定子功率 圖 1.5 同步運行狀態圖 P� = P�− P���≅ P� (1.7) 而在超同步運行時 s < 0,此時不論定轉子皆對電網作功,外部的風能將提供定 轉子的全部功率。 圖 1.6 超同步運行狀態圖
6 P� = P�+ P�− P���− P��� ≅ (1 + |s|)P� (1.8) 在本章內單純就風力發電的現狀及發電機工作下不同的運轉模式做簡單的 介紹,由於轉差率與頻率間的相互關係,使得總輸出功率能受轉子側影響,將電 動機設定於所需的工作點上,為達成此目的,便需要有效的轉子側控制方法,後 面章節將陸續介紹系統的模型與控制應用。
7
二、 風機系統介紹
在本章中將逐一介紹風機系統中各個組件的功能,了解機械系統與電動機間 的詳細關係,並利用電力轉換中常見的座標軸轉換,建立之後模擬的基礎;另外 功率追蹤方式與風能轉換與吸收的過程也是一大重點,了解詳細的內容後才能對 控制作正確的設計。2.1 風機特性
當今的大型發風力電機種類,主要為垂直式風機,葉片通常為三葉,整個風 機的結構主要由塔柱、葉片、齒輪箱、發電機、電力電子設備與傳輸裝置組成, 在風力發電的過程中,首先必定需經由風機的運作將風能轉換為機械能,因此風 機設備的好壞,直接影響了功率擷取大小以及運行的安全和可靠度,而輸出功率 可依葉片大小決定,輸出功率較高者甚至可達數百萬瓦級。 根據空氣動力學,風能的功率可表達為 P =12 ρAV� (2.1) ρ為空氣密度;A 為葉片轉動經過之面積;V 為風速 直觀上考慮風的流動,其速度在經過葉片後並不會直接消失,表示風機並無法完 全的吸收輸入的風能,而風能與機械能間轉換關係可由貝茲法則[4]推得,如圖 2.1,根據能量守恆與質量守恆定律,推得出在葉片後端風速 V2 為前端風速 V1 的三分之一時,可得到最大的吸收功率 P� P� =1627 (12 ρAV��) (2.2)8 圖 2.1 風速經葉片前後之變化 而在最理想的狀態下,根據貝茲法則推導的結果葉片能吸收 59%的風能,可 想而知在實際應用上更是有許多的限制和損耗,效率因其結構、材質、環境等有 所不同,一般來說其值約在 0.4~0.5 左右,鮮少超過 0.5,為方便表示定義出風機 的功率轉換係數 C�,此係數即表示風機吸收的功率 P� 與進入扇葉前完整的風 能 P 的比值,代表了風機吸收能量的效率,可得到關係式 C� = P�⁄ ,並與式P (2.1)推出風機的功率表示式。 P� = 12 ρAC�V� (2.3) 由於各家廠商的設備與材質的不同,功率轉換係數各自有相對應的式子,由 於風速、轉速與葉片旋角三者皆會影響吸收的風能,為方便表示 C� 與三者間的 關係,定義出尖端速度比(Tip ratio, λ)如式(2.4),利用這新的參數,便可在 2 維圖 中表示出相互的關係。 λ =RωV� (2.4) 功率轉換係數的制定乃根據各廠商的經驗而得,因此將不對式子作詳細的探 討,以下訂出本論文中使用的功率轉換係數公式 ⎩ ⎨ ⎧C�(λ, β) = c��cλ� � − c�β − c�� e ���⁄��+ c�λ 1 λ� = 1 λ + 0.08β − 0.035 β�+ 1 (2.5) 得到式(2.4)、(2.5)後,便可畫出所需的關係圖來
9 圖 2.2 功率因數於不同角度下之變化 圖 2.2 中顯示不同尖端速度比與葉片旋角下,風機之功率係數有所不同,一 般而言當 β 越大時迎風面接觸的面積越小,理所當然的風能吸收的效率較差功 率係數越小,同時可以發現在不同角度下最大的功率轉換係數 C�,皆對應於不 同的尖端速度比 λ,這表示對適當範圍內的風速,轉速能依尖端速度比的關係來 作為工作速率的設定,使風能吸收的效率最大,同時利用角度對功率的影響,更 可以設計風機轉速的工作範圍,維持機組的安全性,這便是最大功率追蹤控制與 旋角控制的基本概念。
10 圖 2.3 不同轉速下發電機之工作區域 在了解風能轉換的關係後,接著設定風機的工作範圍,如圖共可分為四個階段 階段 1 此時風機處於啟動階段,由於風機開始轉動,其轉速處在一很低的範圍內, 此階段下風機的運行脫離於電網,也不存在功率的追蹤,直到轉速上升至工作範 圍內,才開始執行最大功率追蹤任務。另外當風速小於切入風速時,風機同樣會 運作於此區域內,利用旋角控制使轉速變化於一允許的範圍內,避免轉速過低而 運作於共振轉速附近影響機械結構[4]。 轉速恆定 轉速(rad/s) 1 2 3 4 功率 (w ) 功率恆定 ω�_��� 風速(m/s) ω�_��� 圖 2.4 不同風速下之工作區域[5]
11 階段 2 在此階段內,風速位於切速風速與額定風速之間,此時風機能有效吸收風 能,且不會對機械結構造成破壞,因此轉速的值隨風力增強而上升,同時系統運 作於最佳功率吸收點上,功率因子維持於 C���� 上,即最大功率追蹤控制點, 一旦風速超出額定風速後,風機便脫離功率追蹤,跳往下個區域。 階段 3 當轉速過高超出額定轉速,此時風機在最佳功率追蹤狀況下所吸收的風能, 以超過機組的負載量,若不作出相對應的措施,將使風機故障、葉片損毀,此時 將採取定轉速控制,透過槳矩的旋角控制,固定風機的轉速於最大值上,這時功 率因子將不在保持於固定點上,而是根據尖端速度比與功率因子的關係,隨風速 的升降控制轉速固定,其工作點將在固定旋角值下,隨尖端葉速比與功率因素之 關係而移動。 階段 4 當階段 3 中轉速維持最大而風速繼續上升,此時輸出的功率將超出系統的 額定值,將使變電裝置受損,因此在此階段中要求吸收的風能維持在定值,同時 使葉片的轉速不高於最大轉速,為達成此要求,必須使用旋角與功率因素的關 係,適時調整 Cp 之大小,即旋角控制的主要工作區,若風速仍繼續提高使旋角 控制也無法抑制其轉速,最後將會停止風機運作以保護設備安全。
12
2.2 機械模型
對風機的機械模型,為了方便計算與分析,在這裡省略了阻尼與摩擦係數等 影響,同時令轉軸質量相對極小,因此在機械傳導部分將不會產生損耗,其模型 可如圖 2.5 所示 圖 2.5 風機機械示意圖 圖中可以看到,整個風機主要分為兩個部分,高速軸與低速軸,低速軸乃迎 風面葉片轉動的軸,上面含有風機大部分的轉動慣量,因葉片長、質量大所以轉 動速度緩慢,是帶動整個發電機組的來源,J� 為低速軸轉動慣量,T� 為風速對葉 片所做的轉矩,T 為低速軸對高速軸所做之轉矩。 高速軸則是帶動發電機轉子,在低速軸中的動能經由齒輪完整傳達到轉子 上,因齒輪比的影響,高速軸的轉速將快上許多,也因此才能使發電機正常工作, J�為高速軸轉動慣量;T� 為電機端所作之轉矩;T�為低速軸轉至高速軸之轉 矩;T 為高速軸轉至低速軸之轉矩。 軸與低速軸轉速、兩者互作之轉矩相差一齒輪比係數,我們可將兩軸之轉矩 方程化為一式,其過程如下,N�、N�分別為兩者之齒輪數 ω� =NN� �ω�= Nω� J�dωdt = T� � – T 𝐓𝐭 𝐓𝐦13 J�dωdt = T� �− T� ⟹ �NJ�� + J��dωdt =� TN − T� � 為求方便,而後將 �� ��+ J� 以 J 表示,化簡後的一階方程表示電機轉子轉速受內 部電磁轉矩與外部風力轉矩所影響,利用這兩者的變化,才能做到轉速的控制。 Jdωdt =� TN − T� � (2.6)
2.3 最大功率追蹤[6]
根據圖 2.2,可以知道在風機正常工作區域中,假設旋槳角度為零,則存在 一最佳尖端葉速比 λ��� 使功率因素為最大 C����,根據此結果可以知道,若想 要風機在一般工作下得到最佳的風能吸收,那麼應使系統運作於最佳功率點上, 並根據最佳功率因素調整風機的轉速,如圖 2.7 所示,當中的最佳功率點因尖端 葉速比已知,轉速的值將隨風速上升而提高,不同風速的工作點間將可連成一拋 物線,這段曲線即是風機的最大功率曲線。 圖 2.6 最佳功率吸收點14 圖 2.7 最佳功率點上轉速-功率曲線圖 根據圖 2.7 的功率曲線,可進一步將式(2.3)化為 P��� =12 ρAC�V� = 12 ρAC��Rωλ � ���� � = kω�� (2.7) 其中k =� �ρAC�� � ������ � 為最大功率曲線常數,根據此式子即可得到適當風速 下,控制轉子轉速的風機輸出功率值,在忽略機械耗損後可將此處的最大風機功 率視為電動機的電磁總功率。 P��� ≅ P� 在式(1.3)中,定轉子功率間存在一轉差率 s 的關係,因能量守恆定轉子輸出 之功率為電動機的總電磁功率,由此可得到定子電磁功率與總電磁功率的關係 P� = P��+ P��= (1 − s)P�� 由定子功率關係式(1.4)帶入上式之結果於最大風機功率中 P�= P��+ P���= (1 − s) + PP��� ��� (2.8) 最後求得所需的定子輸出功率參考值,運用此參考式,對最大功率追蹤的控制即 可完成,在第三章內會針對控制的架構有更深入的探討。
15
2.4 三相電機模型[7]
對三相對稱感應發電機,由於他的高階數與非線性,在一般模擬下很難有效 的表示,對此為建立一數學模型,需要先做一定的假設 i. 使三相線圈繞阻對稱,氣隙間磁動勢成正弦分佈 ii. 忽略鐵心損耗的影響 iii. 溫度與頻率不影響繞阻 iv. 忽略磁路飽和,令繞阻電感皆為線性 根據以上的假設,可以得到感應發電機其三相靜止座標軸上的等效模型,如 圖 2.8 所示,其中下標 s 代表與定子的參數,下標 r 代表轉子的參數;abc 分別 表示電機的三相;角度 𝜃� 為定子繞阻與轉子繞阻的機械角位移;ψ 為磁通量; u 為電壓、i 為電流,同時為方便後面的計算分析,轉子側變數皆按匝數比關係 折算至定子處,且令定子匝數 N� 與轉子匝數 N� 相同 圖 2.8 理想三相電機模型圖 機械角位移與電磁角位移根據極對數 n� 有以下關係 𝜃� =n𝜃� � ⇒ 𝜔� = 𝜔� n�16 定子電壓模型: u�� = R�i��+dψdt�� u�� = R�i��+dψdt�� u��= R�i��+dψdt�� 將三相定子關係式合併為矩陣型態,𝐮𝐚𝐛𝐜𝐬 = [u�� u�� u��]�,𝐢𝐚𝐛𝐜𝐬 = [i�� i�� i��]�, 𝛙𝐚𝐛𝐜𝐬= [ψ�� ψ�� ψ��]�,𝐫𝐬= � R� 0 0 0 R� 0 0 0 R� � 𝐮𝐚𝐛𝐜𝐬= 𝐫𝐬𝐢𝐚𝐛𝐜𝐬+ 𝒑𝛙𝐚𝐛𝐜𝐬 (2.9) 轉子電壓模型: u��= R�i��+dψdt�� u��= R�i��+dψdt�� u�� = R�i��+dψdt�� 同樣轉子關係式也能有相似的表示式,𝐮𝐚𝐛𝐜𝐫= [u�� u�� u��]�,𝐢𝐚𝐛𝐜𝐫 = [i�� i�� i��]�, 𝛙𝐚𝐛𝐜𝐫= [ψ�� ψ�� ψ��]�,𝐫𝐫 = � R� 0 0 0 R� 0 0 0 R� � 𝐮𝐚𝐛𝐜𝐫= 𝐫𝐫𝐢𝐚𝐛𝐜𝐫+ 𝒑𝛙𝐚𝐛𝐜𝐫 (2.10) 磁通量模型: 磁通量的組成由定轉子的自感分量與互感分量組成,考慮三相線圈繞組為對 稱且磁動勢沿氣隙成正弦分佈,可得到以下電流與磁通量的關係矩陣,同時為方 便後續的推導將原先矩陣表示如式(2.11),其中 𝑳𝒔𝒔 為定子自感矩陣,𝑳𝒓𝒓 為轉 子自感矩陣,𝑳𝒔𝒓 為定轉子互感矩陣
17 ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ψ�� ψ�� ψ�� ψ�� ψ�� ψ��⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ L�� L���� L���� L���� L���� L���� L���� L�� L���� L���� L���� L���� L���� L���� L�� L���� L���� L���� L���� L���� L���� L�� L���� L���� L���� L���� L���� L���� L�� L���� L���� L���� L���� L���� L���� L�� ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡i�� i�� i�� i�� i�� i��⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ (2.11) �𝛙𝐚𝐛𝐜𝐬 𝛙𝐚𝐛𝐜𝐫� = � 𝑳𝒔𝒔 𝑳𝒔𝒓 𝑳𝒔𝒓𝑻 𝑳𝒓𝒓� � 𝐢𝐚𝐛𝐜𝐬 𝐢𝐚𝐛𝐜𝐫� (2.12) 圖 2.9 發電機三相繞阻圖 圖 2.10 定轉子間繞組角度差 因為線圈繞組為對稱,且定轉子匝數相等,則定子各相漏感相等於轉子各相 漏感相等,轉子互感 𝐿��、定子互感 𝐿�� 與定轉子間互感 𝐿�� 之值也相同,帶 入式(2.11)可得到以下的關係
18 L�� =NN� �L��,L��= N� N�L�� L��= L�� = L�� Lℓ�= Lℓ� 磁通量矩陣內主對角元素即為定轉子的自感 L�� = L�� = L��= L�� = L�� = L��= Lℓ�+ L�� = Lℓ�+ L�� 而定子與轉子的互感分量可分為兩部分來分析: 1.定子間彼此的互感與轉子間彼此的互感,由於繞組的角度固定且對稱於 120 度, 所以其互感為固定的值 L���� = L���� = L���� = L���� = L���� = L����= −12 L�� L����= L���� = L����= L���� = L���� = L���� = −12 L�� 2.相對的定子與轉子間由於轉速的關係,繞組彼此有一角度的差,互感為一角度 的變數 L���� = L���� = L���� = L���� = L���� = L���� = L��cos (θ�) L���� = L���� = L����= L���� = L���� = L����= L��cos (θ�+23 π) L���� = L���� = L����= L���� = L���� = L����= L��cos (θ�−23 π) 寫出式(2.12)之電感矩陣 𝑳𝒔𝒔= ⎣ ⎢ ⎢ ⎢ ⎢ ⎡Lℓ�+ L�� −12 L�� −12 L�� −12 L�� Lℓ�+ L�� −12 L�� −12 L�� −12 L�� Lℓ�+ L��⎦⎥ ⎥ ⎥ ⎥ ⎤ (2.13) 𝑳𝒓𝒓= ⎣ ⎢ ⎢ ⎢ ⎢ ⎡Lℓ�+ L�� −12 L�� −12 L�� −12 L�� Lℓ�+ L�� −12 L�� −12 L�� −12 L�� Lℓ�+ L��⎦⎥ ⎥ ⎥ ⎥ ⎤ (2.14)
19 𝑳𝒔𝒓 = ⎣ ⎢ ⎢ ⎢ ⎢
⎡ L��cos (θ�) L��cos (θ�+23 π) L��cos (θ�−23 π) L��cos (θ�−23 π) L��cos (θ�) L��cos (θ�+23 π) L��cos (θ�+23 π) L��cos (θ�−23 π) L��cos (θ�) ⎦⎥
⎥ ⎥ ⎥ ⎤ (2.15) 至此得到完整的磁通量方程,並根據式(2.9)、(2.10)與新的電感矩陣關係式(2.13) -(2.15),改寫出新的電壓方程表示式。 �u𝐚𝐛𝐜𝐬 u 𝐚𝐛𝐜𝐫 � = �𝐫𝐬+ 𝒑𝐋𝐬𝐬 𝒑𝐋𝐬𝐫 𝒑𝐋𝐬𝐫𝐓 𝐫𝐫+ 𝒑𝐋𝐫𝐫� � 𝐢𝐚𝐛𝐜𝐬 𝐢𝐚𝐛𝐜𝐫� (2.16) 電轉矩方程: 將電磁系統設為線性[7],耦合場內儲存之能量 W� 等於共能 W�,又儲存之 能量可寫為下式 W�=12(i����)�(L�− L��I)i����+ (i����)�L��i����+12(i����)�(L�− L��I)i���� 而機械能的變化在系統中則有以下的關係,T� 表示電磁轉矩 dW� = −T�d𝜃� = −T�n1 �d𝜃� 而對耦合場的總輸入能量 W�+ W�,當中只有部分為真正儲存的場能量,可得知 剩餘的共能將成為轉矩變化的來源,由此寫出電磁轉矩之表示式。 T�(i, 𝜃�) = n�∂W�∂𝜃(i, 𝜃�) � 帶入式(2.13)至式(2.15),由於自感矩陣 L� 與 L� 為一固定的值,不帶有角 度參數,同時忽略極小的定轉子漏感,展開可得 T�(i, 𝜃�) = n�(i����)�∂𝜃∂ �(L��)i���� (2.17) = n�L����i���i��−12 i��−2 i1 ��� + i���i��−12 i��−12 i���
+ i���i��−12 i��−12 i���� sin (𝜃�)
20 而轉矩與轉子速度之關係如式(2.18) T�− T� =N ∙ n1 �J dω� dt (2.18) T� 為機械端風速做功所得之轉矩,J 為整個機械系統的轉動慣量。
2-5 參考框理論
在同步電動機中,由於轉子轉速對三相座標中變數的影響,若同時考慮定子 與轉子模型,其階數較大不便於分析,因此一美國工程師派克(R.H.Park)在 1929 年提出了目前最常用的一種座標軸轉換方式[8],此轉換將普通的三相座標轉換 為在ω 角速度中旋轉的 dq0 座標軸,在三相分量幅值相等的情形下,垂直於 dq 平面的零軸(0 軸)分量為零,所以可將一般的三相座標軸簡化利於分析和使用, 同時還可根據不同的參考框速度 ω 得到所需的 dq 參考座標軸。 對一組靜止的三相座標軸變數 f���,利用派克轉換將座標改至旋轉角速度 ω 的 dq0 坐標軸上,並將變數令為 f���,兩座標軸變數間根據圖 2.11 有如下的 關係。f
bsf
asf
dsf
qsf
cs 圖2.11 三相旋轉座標與 dq 旋轉座標之關係圖21 f��� = K� f��� (2.19) f��� = [f� f� f�]� f��� = [f� f� f�]� 𝐊𝐬 =23 ⎣ ⎢ ⎢ ⎢ ⎢
⎡cosθ cos (θ −23 π) cos(θ +23 π) sinθ sin(θ −23 π) sin(θ +23 π)
1 2 1 2 1 2 ⎦⎥ ⎥ ⎥ ⎥ ⎤ (2.20) 𝐊𝐬�𝟏 = ⎣ ⎢ ⎢ ⎢ ⎡ cosθ sinθ 1 cos (θ −23 π) sin(θ −23 π) 1 cos(θ +23 π) sin(θ +23 π) 1⎦⎥ ⎥ ⎥ ⎤ (2.21) ω =dθdt 其中 K� 即為座標軸的轉換矩陣,ω 可為任意轉速,若為零表示 dq0 座標 為靜止;將 dq0 軸之變數關係式寫出,當 f��� 間相差 120 度且幅值相同時,三 者可相互抵效 f� 分量即為零,此時理想三相電源可簡化為 dq 分量。
f�= 23 �f�cosθ + f�cos �θ −23 π� + f�cos �θ +23 π�� (2.22)
f� = 23 �f�sinθ + f�sin �θ −23 π� + f�sin �θ +23 π�� (2.23)
f� =13 (f�+ f�+ f�) (2.24) 在了解座標軸轉換的機制後,針對特定旋轉速度下的座標軸,可做命名方便 使用與辨認,此處列出一些常用的參考框,如表 2.1,ω� 為定子的電磁角速度 也可看做電網頻率,ω� 為轉子的磁場角速度,在 dq 模型的推導中,因為電網 頻率常保持於穩定,常使用定子旋轉座標作為轉換方法,簡單的說由於 ω 可為 任意值,在使用上可根據化簡的需求做改變。
22 參考框 變數 ω 任意旋轉座標 𝐊𝐬 ω� 同步旋轉參考框 𝐊𝐬𝐬 ω� 轉子旋轉參考框 𝐊𝐬𝐫 0 靜止參考框 𝐊𝐬𝟎 表 2.1 常見之參考座標軸
2.6 dq 兩相旋轉座標模型
在 2.4、2.5 節中,有了感應發電機的完整模型與參考框理論的介紹,在此將 電機三相模型轉換為任意角速度下的兩相旋轉模型,參考定子電壓關係式(2.9) 並待入帕克轉換矩陣(2.20),求出新的的定子電壓方程。 𝐊𝐬𝐮𝐚𝐛𝐜𝐬= 𝐊𝐬𝐫𝐬𝐢𝐚𝐛𝐜𝐬+ 𝐊𝐬𝒑𝛙𝐚𝐛𝐜𝐬 根據式(2.19)中三相分量與兩相旋轉座之關係將上式變換,整理矩陣方程式 並替換角速度變數 ω 後得到任意角速度旋轉模型下定子電壓方程 𝐊𝐬𝐮𝐚𝐛𝐜𝐬 = 𝐫𝐬𝐊𝐬𝐢𝐚𝐛𝐜𝐬+ 𝐊𝐬𝒑(𝐊𝐬�𝟏𝛙𝐝𝐪𝐨𝐬) 𝐮𝐝𝐪𝐨𝐬 = 𝐫𝐬𝐢𝐝𝐪𝟎𝐬+ 𝐊𝐬𝒑𝐊𝐬�𝟏𝛙𝐝𝐪𝟎𝐬+ 𝐊𝐬𝐊𝐬�𝟏𝒑𝛙𝐝𝐪𝟎𝐬 𝐮𝐝𝐪𝟎𝐬 = 𝐫𝐬𝐢𝐝𝐪𝟎𝐬+ 𝒑 � 0 −θ 0 θ 0 0 0 0 0 � 𝛙𝐝𝐪𝟎𝐬+ 𝒑𝛙𝐝𝐪𝟎𝐬 展開後得 ⎩ ⎪ ⎨ ⎪ ⎧u�� = R�i��− ωψ��+dψdt�� u�� = R�i��+ ωψ�� +dψdt�� u��= R�i��+dψdt�� (2.25)23 同樣對轉子電壓方程(2.10)做類似的推導,也可得到旋轉座標下新的轉子電 壓方程,但需注意由於轉子轉動的特性,其電磁角度代有一 ω� 的旋轉速度, 在轉換至同步旋轉參考框時需扣除其成分,因此對帕克轉換矩陣需要做些調整。 𝐊𝐬𝐫 = 23 ⎣ ⎢ ⎢ ⎢ ⎢
⎡cosα cos (α −23 π) cos(α +23 π) sinα sin(α −23 π) sin(α +23 π)
1 2 1 2 1 2 ⎦⎥ ⎥ ⎥ ⎥ ⎤ (2.26) α = θ − θ� 新的旋轉角速度中含有原先轉換的任意角速度 ω 與轉子本身的電磁角速 度 ω� ,經過此矩陣的變換,轉子側方程式才能正確的轉換至設定的任意旋轉 座標上,新的轉子電壓方程如式(2.27) 𝐊𝐬𝐫𝐮𝐚𝐛𝐜𝐫 = 𝐊𝐬𝐫𝐫𝐫𝐢𝐚𝐛𝐜𝐫+ 𝐊𝐬𝐫𝒑𝛙𝐚𝐛𝐜𝐫 ⟹ ⎩ ⎪ ⎨ ⎪ ⎧u�� = R�i��− (ω − ω�)ψ��+dψdt�� u�� = R�i��+ (ω − ω�)ψ��+dψdt�� u�� = R�i��+dψdt�� (2.27) 對磁通量與電流的關係,同樣可以經由座標軸轉換得到旋轉座標上的新表示式 �𝐊𝐬 𝟎 𝟎 𝐊𝐬𝐫� � 𝛙𝐚𝐛𝐜𝐬 𝛙𝐚𝐛𝐜𝐫� = � 𝐊𝐬 𝟎 𝟎 𝐊𝐬𝐫� � 𝐋𝐬𝐬 𝐋𝐬𝐫 𝐋𝐬𝐫𝐓 𝐋𝐫𝐫� � 𝐢𝐚𝐛𝐜𝐬 𝐢𝐚𝐛𝐜𝐫� �𝛙𝐝𝐪𝟎𝐬 𝛙𝐝𝐪𝟎𝐫� = � 𝐊𝐬𝐋𝐬𝐬𝐊𝐬�𝟏 𝐊𝐬𝐋𝐬𝐫𝐊𝐬𝐫�𝟏 𝐊𝐬𝐫𝐋𝐬𝐫𝐓𝐊𝐬�𝟏 𝐊𝐬𝐫𝐋𝐫𝐫𝐊𝐬𝐫�𝟏 � �𝐢𝐝𝐪𝟎𝐬 𝐢𝐝𝐪𝟎𝐫� 整理電感與轉換矩陣的關係 𝐊𝐬𝐋𝐬𝐊𝐬�𝟏 = � L� 0 0 0 L� 0 0 0 0�
24 𝐊𝐬𝐫𝐋𝐫𝐊𝐬𝐫�𝟏= � L� 0 0 0 L� 0 0 0 0� 𝐊𝐬𝐋𝐬𝐫𝐊𝐬𝐫�𝟏 = 𝐊𝐬𝐫𝐋𝐬𝐫𝐓𝐊𝐬�𝟏 = � L� 0 0 0 L� 0 0 0 0� 從矩陣元素內可以看到,對 0 軸分量的電感項經過轉換後皆被消除,同時根 據式(2.24)中,對三相對稱的訊號源其相加的值將為零,0 軸的電壓方程式可被 忽略,因此往後在表示旋轉座標軸時,將只採用 dq 作為方程式的使用,整理上 列的矩陣可以得到新的磁通量關係矩陣 ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ψ�� ψ�� ψ�� ψ��⎦⎥ ⎥ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎢ ⎢ ⎡L� 0 L� 0 0 L� 0 L� L� 0 L� 0 0 L� 0 L�⎦ ⎥ ⎥ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎢ ⎢ ⎡i�� i�� i�� i��⎦⎥ ⎥ ⎥ ⎥ ⎤ (2.28) L� = Lℓ�+ L��,L�= Lℓ�+ L��,L� =32 L�� 三相座標之轉矩根據式(2.17),同樣將轉換矩陣代入,得到 dq 軸下轉矩與電 流的關係式 T�(i, 𝜃�) = n��K���i������∂𝜃∂ �(L��)K� ���i ���� T�= 32 n�L�(i��i��− i��i��) (2.29) T�= 32 n�LL� � (ψ��i��− ψ��i��) (2.30) 實功率與虛功率則如式(2.31)-(2.34)所示 P� = 32 (u��i��+ u��i��) (2.31) P� =32 (u��i��+ u��i��) (2.32) Q� =32 (u��i��− u��i��) (2.33)
25 Q� = 32 (u��i��− u��i��) (2.34) 根據式(1.4)、(1.5), P� 與 P� 中含有電阻的消耗量與電磁輸出量,在控制時必 須考慮避免誤差 P���= 32 R��i��� + i���� P��� = 32 R��i���+ i���� 在本章內依序介紹了風能吸收的方式、機械模型、功率追蹤方式與三相電機 模型與其兩相座標轉換模型,有了這些基本的前提後,利用 Matlab/Simulink 模 組將實際使用的風機模型組建起來後,便能實際運用第三章內介紹的控制方法, 而功率追蹤策略更是提供了控制的目標,有了一切基礎後才能針對探討的問題與 目標設計新的控制。
26
三、 轉子側控制策略
本章將對 DFIG 轉子側控制作詳細的介紹,控制策略將以導向控制作為主 軸,控制器使用一般的 PI 控制器,利用實功與虛功解耦控制的特性,分開設計 控制器的目標,並利用第二章內介紹的風機模型作為模擬的依據;此外介紹其控 制策略與其改良後,將利用一種有效的模型簡化方法,改進傳統的控制架構,最 後對電壓驟降時的暫態作詳細的分析,並加入新的設計方法。3.1 定子磁通量導向控制
3.1.1 導向控制方法
在得知 DFIG 的詳細模型後,接著必須了解控制的方法,而原先的三相電路 模型因複雜度較高,在控制使用上較不方便,因此先使用帕克轉換將三相旋轉座 標轉為兩相旋轉座標,降低複雜度且同時擁有原先電路的特性,根據此原則,將 三相電壓方程與電流磁通量關係式代入電壓平衡關係轉為 dq 兩軸表示式, 並且 為實現電流對功率分別的解耦控制,消除 dq 電壓關係式中非線性項,使用導向 控制策略,忽略極小定子電阻,其中定轉子頻率設為常數項,在迴路中與磁通量 同看作補償因子,進而實現 dq 軸下電流與功率解耦控制,控制輸出項為轉子電 流。在 DFIG 轉子側轉換器控制中,常見的控制方法有導向控制(Field Orientated Control,FOC)與直接功率控制(Direct Power Control,DPC),而導向控制又可分為定 子 磁 通 量 導 向 (Stator Flux Orientated Control,SFOC) 與 定 子 電 壓 導 向 (Stator Voltage Orientated Control,SFOC),由於導向控制的廣泛使用和較好的強健性,以 下將針對此種控制策略做完善的說明。
27 情形下,除具體關係式有所不同以外,控制的目標是一致的在此我們使用 SFOC 作為控制的方法[5],為使轉子電流的控制能分別控制實功、虛功目標,在得到 解耦的電流式子後,代入實功虛功關係式,得到完整的控制架構,以下為詳細的 推導。 由 SFOC 將定子磁通量定於 d 軸上 �i��L�+ i��L� = ψ� = ψ�� i��L�+ i��L�= 0 = ψ�� (3.1) 由此可重新推得新的電流關係式 ⎩ ⎨ ⎧i�� = ψL� � − L� L� i�� i�� = −LL� � i�� (3.2) 現在考慮定子端電壓式 u�� = R�i��− ω�ψ��+dψdt�� u�� = R�i��+ ω�ψ��+dψdt�� 忽略定子電阻不計,代入磁通量導向之結果式(3.1),可得到新的關係式 u�� = 0 u�� = ω�ψ�� = V� � 上述能很明顯的看出,在忽略電阻極小項後,電壓和磁通分別集中在 q 軸與 d 軸上,並呈現 90 度的角度差,即在定子電頻率座標下,定子電壓與磁通量可視 為在同頻率下同步旋轉,理想上作為 dq 軸之常數存在。 但須注意在電網電壓不平衡及驟降等故障發生時,會導致使用之導向控制出 現問題,導致解耦失敗、控制性能惡化直接影響功率追蹤之效果,在後面會針對 此問題有更詳盡的討論。
28 有了新的電壓電流公式後,可依照式(2.31)、(2.34)求出新的功率關係式 �P� = 3 2 ( u��i��+ u��i��) Q� = 32 ( u��i��− u��i��) ⟹ ⎩ ⎪ ⎨ ⎪ ⎧ P� = −32 V� L� L� � i�� Q� = 32 V� �� ω�L�− 3 2 V� L� L�� i�� (3.3) 由上式,定子實功和虛功分別受轉子電流 idr 與 iqr 影響,這表示控制 dq 軸之轉 子電流就可以控制定子功率,達成我們所需的解耦控制,P� 及 Q� 便能設為控 制之參考值輸入。 根據式(3.3)之控制參考輸入,為達成所需的轉子電流控制架構,使用轉子電 壓公式進行設計 u�� = R�i��− sω�ψ��+dψdt�� u��= R�i��+ sω�ψ��+dψdt�� 將式中轉子磁通量代入 ψ�� = L�i��+ L�i�� ψ��= L�i��+ L�i��,和電流關係式, 可得 ⎩ ⎪ ⎨ ⎪ ⎧ u�� = R�i��+ σL�didt − sω�� �σL�i��+LL� � dψ�� dt u��= R�i��+ σL�didt + sω�� �σL�i��+ sω�LL� � ψ�� (3.4) σ = 1 −LL�� �L� 上式即為電流控制式,令 u��� = R �i��+ σL�didt�� u��� = R�i��+ σL�didt��
29 Plant
−
V��_����������� iqr* P + iqr G�(s) PI G(s) G�(s) P* PI Q*+
+
+
G�(s)��-
V��_����������� Plant + −3 2 V� �� ω�L�−
Q idr* idr G�(s) PI G(s) G�(s) PI+
+
+
G�(s)�� 3 2 V� �� ω�L�+
-
outerloop 圖3.1 dq 軸解耦控制方塊圖 innerloop 假設控制運作於穩態下 ���� �� = 0 ,歸納出穩態下控制方程式 u�� = u��� − sω�σL�i�� u��= u��� + sω�σL�i��+ sω�LL� � ψ�� 在式中 u���′ 為控制器之輸出,將其餘耦合的電流項與磁通量項定為外部補償 項,在控制中消除其影響,對受控系統來說可看作一干擾的輸入。 �u��_�����������= sω�σL�i��+ sω� L� L� ψ�� u��_����������� = −sω�σL�i�� (3.5) 完整的控制迴路便如圖 3.1 所示,Plant 表示受控的雙饋感應發電機之電機模 型,包含轉子電壓方程與定子功率,輸入為電壓,磁通量為其變數;控制器使用 PI 控制,G�(s)為使用者自訂之濾波器,在此先定為 1;G�(s) 為根據式(3.3)用來 表示功率與轉子電流之關係,整個控制結構共分兩層,內部為電流控制迴路,使 電流受控於功率參考值,外部為功率控制迴路。30 G(s) =σL 1 �s + R� G�(s) = −23LL� �V�� 根據圖 3.1 之控制方塊圖,系統為一雙層的串級控制,根據此控制的設計標 準在一般情況下先對內部迴路控制作調整,而後調節外部回路,且內部迴路之動 態響應應快於外部回路,原因在於當外部干擾進入系統時,經由內部迴路快速的 動作會降低對外部控制器的影響,若外部響應較快,會使干擾項嚴重影響外部主 迴路,連帶使內部回路產生大量的暫態,影響控制的穩定性。
3.1.2 內部迴路控制
消除干擾訊號,內部電流控制迴路即如圖 3.2 所示 閉迴路轉移方程式: G��(s) = �K��+ Ks ��� σL�s + R1 � 1 + �K��+ Ks ��� σL�s + R1 � G�(s) = K��s + K�� σL� s�+R�+ K�� σL� s + K �� σL� G�(s) 在此假設G�(s) = 1 Plant Plant idr PI G(s) idr* iqr G�(s) PI G(s) G�(s) iqr*+
+
圖3.2 內部迴路控制結構圖31 G��(s) = K��s + K�� σL� s�+R�+ K�� σL� s + K �� σL� (3.6) 對 PI 參數使用內模控制策略加以設計[9],其閉迴路方程如下所示 G��(s) = (s + α)α � 與原先的轉移函數作比較,可以發現當極-零點對消後,可將原先的函數化為標 準一階函數即 n = 1,利用此設計方法代入內模控制中整理過後的控制器 F(s) F(S) =(s + α)α��− α�G(s)�� 由於使用 PI 控制器,其參數表示為 PI =K��s + Ks �� 利用控制器等效的關係 PI = F(s) K��s + K�� s = α (s + α) − α (σL�s + R�) 最後可得到 PI 控制器參數關係式得到內模控制方法的結果。 ⎩ ⎪ ⎨ ⎪ ⎧ K�� = σL�α K��= R�α G��(s) =s + αα (3.7)
3.1.3 外部迴路控制
當求出有功功率與無功功率之參考值後,為幫助系統正確追蹤實際的功率, 額外加入 PI 控制器,避免形成開迴路控制,接著經由電壓與電流間的關係式加 入正確的補償項,將控制訊號轉為內部電流控制迴路之輸入,完成控制32 外部迴路輸入至輸出之轉移方程可表示下 G��(s) = �K��+ Ks � G�� ��(s) 1 + �K��+ Ks � G�� ��(s) G��(s)為內部迴路之閉迴路轉移函數, G��(s) 代入內部迴路的設計,為標準一 階函數,則外迴路轉移方程化為 G��(s) = αK�� sK�� K�� + 1� s�+ α�K�� + 1�s + αK�� 根據二階標準系統的設計準則,其轉移函數形式可化為 ��� ������������
,則
ζ =α�K��+ 1� 2�αK�� (3.8) ω� = �αK�� (3.9) ζ 為阻尼比,ω�為自然頻率,在此固定 ζ = 0.707 以此設計 PI 參數的範圍,但 由於外部迴路轉移函數內存在零點,影響二階系統偏離低阻尼比下的性能指標, 因此令零點與主極點的距離能在 10 倍以上,此時得到一條件式。 K�� K�� > 10𝜁ω� (3.10) 另外在圖 3.1 內表明此處的控制結構為一串級控制,設計控制參數時須使內 iqr* idr* P G�(s) P* PI −32 V�� � ω�L� Q G�(s) Q* PI-
-
圖3.3 外部控制器之輸出33 部迴路之響應快於外部迴路,而在式(3.7)根據內模控制奠定了內部轉移函數之形 式,並根據一階標準函數之步階響應圖,可得到穩態時間約為 � �,同樣外部迴路 之步階響應穩態時間,根據[10]內之簡化方法得到 �.� ���,利用兩者的穩態時間作 為暫態響應快慢的比較方法,因此得到條件式。 4.6 ζω� > 5 α (3.11) 此時根據式(3.8)-(3.11),得到一聯立之不等式,同時為保持穩定性設 K��、K��、α > 0 整理不等式之條件並代入阻尼比值後,可得到結果如式(3.12),有了參數設定的 範圍後,便可對 PI 控制器作出所需設計。 ⎩ ⎪ ⎨ ⎪ ⎧0 < K�� < 0.111 α > 1.62K�� α = 2K�� �K��+ 1�� (3.12)
3.2 改良 PI 控制[3]
在前面我們有了一個於穩態工作下,實現轉子側轉換器對實功和虛功功率分 別的解耦控制,並對控制器之參數作了相對應之設計,但考慮式(3.4)中磁通量之 微分項,由於在 SFOC 中工作點設為穩態,微分項被直接省略,可以想見在轉換 器工作之初期,其暫態缺乏相對應的抑制,控制器效果下降,在此需要在原有的 控制基礎上額外設計,首先將定子電壓式中磁通量項作替換,代入式(2.28)磁通 量關係式後,將電壓方程之磁通量變數轉為電流項。 u�� = R�i��− ω�ψ��+dψdt�� u�� = R�i��+ ω�ψ��+dψdt�� �uu�� ��� = � R�+ 𝑝L� −ω�L� ω�L� R�+ 𝑝L�� � i�� i��� + � 𝑝L� −ω�L� ω�L� 𝑝L� � � i�� i��� (3.13)34 同樣,忽略定子電阻後,得到新的關係式 �uu�� ��� = � 𝑝L� −ω�L� ω�L� 𝑝L� � � i�� i��� + � 𝑝L� −ω�L� ω�L� 𝑝L� � � i�� i��� (3.14) 現在有了新的定子電壓電流關係後,對轉子電壓作代換 u�� = R�i��− sω�ψ��+dψdt�� u��= R�i��+ sω�ψ��+dψdt�� 同樣代入式(2.28)轉子磁通量 �uu�� ��� = � R�+ 𝑝L� −sω�L� sω�L� R�+ 𝑝L�� � i�� i��� + � 𝑝L� −sω�L� sω�L� 𝑝L� � � i�� i��� (3.15) 觀察上述轉子與定子電壓關係式,可發現兩者皆由 dq 軸上定子電流與轉子電流 兩部分組成,也就是說將矩陣參數經過一定的轉換後,能各自消除定轉子的電流 項,在忽略轉速的情況下,將方程式化為線性關係,實現所需的解耦控制,而考 慮到暫態的消除,由於電機模型之輸入為 dq 軸之電壓,若將補償項換為電壓, 即可讓控制器"直觀"的消除暫態誤差,對式(3.13)移項同乘作變換。 L� L� � 𝑝L� −ω�L� ω�L� 𝑝L� � � i�� i��� = L� L� � u�� u��� − L� L� � 𝑝L� −ω�L� ω�L� 𝑝L� � � i�� i��� �𝑝L� −ω�L� ω�L� 𝑝L� � � i�� i��� = L� L� � u�� u��� − L�� L� � 𝑝 −ω� ω� 𝑝 � � i�� i��� 對定子電流的分量加入轉子轉速因子,整理新的分量關係 �𝑝L� −ω�L� ω�L� 𝑝L� � � i�� i��� + � 0 ω�L� −ω�L� 0 � � i�� i��� = � 𝑝L� −sω�L� sω�L� 𝑝L� � � i�� i���
35 ⎩ ⎪ ⎨ ⎪ ⎧ω�L�i�� = ω�L�ψ��− iL ��L� � = ω� L� L� ψ��− ω� L�� L� i�� ω�L�i��= ω�L�ψ��− iL ��L� � = ω� L� L� ψ��− ω� L�� L� i�� ∴ � 𝑝L� −sω�L� sω�L� 𝑝L� � � i�� i��� = LL� � � u��+ ω�ψ�� u��− ω�ψ��� − L�� L� � 𝑝 −sω� sω� 𝑝 � � i�� i��� (3.16) 經上述變換後,可得到式(3.14)中定子電流項與轉子電流、定子電壓、磁通量間 之關係,由關係式(3.15)便能將式(3.14)中定子電流項替換,留下導向控制所需的 轉子電流分項與其補償項,用來設計所需的控制。 �uu�� ��� = � R�+ 𝑝L� −sω�L� sω�L� R�+ 𝑝L�� � i�� i��� + L� L� � u��+ ω�ψ�� u��− ω�ψ��� −LL�� � � 𝑝 −sω� sω� 𝑝 � � i�� i��� ⎩ ⎪ ⎨ ⎪ ⎧�uu�� ��� = � R�+ 𝑝σL� −sω�σL� sω�σL� R�+ 𝑝σL�� � i�� i��� + L� L� � u��+ ω�ψ�� u��− ω�ψ��� σ = 1 −LL�� �L� ∴ ⎩ ⎪ ⎨ ⎪ ⎧u�� = R�i��+ σL�didt − sω�� �σL�i��+LL� � (u��+ ω�ψ��) u�� = R�i��+ σL�didt + sω�� �σL�i��+LL� � (u��− ω�ψ��) (3.17) 與 3.1 節中類似,定出外部的補償項與控制器的輸出 ⎩ ⎨ ⎧u��_������������ = −sω�σL�i��+LL� � (u��+ ω�ψ��) u��_������������= sω�σL�i��+LL� � (u��− ω�ψ��) (3.18) 得到新的補償項後,我們可將他與式(3.9),原先之 SFOC 控制作比較
36 u��_�����������= −sω�σL�i�� u��_����������� = sω�σL�i��+ sω�LL� � ψ�� = sω�σL�i��+ L� L� (ω�ψ��− ω�ψ��) 很明顯的在 dq 軸上皆有新的補償項出現,因控制考慮了磁通量微分項,如式中 ω�ψ�� 轉為 u�� ,由電壓關係式(2.25)可以看出,相對於前面直接忽略暫態的設 計,新的補償輸入考慮了定子電阻與微分項的影響,使控制能在第一時間知道電 壓的變化;同樣 u�� 的補償項中,加入在 SFOC 所忽略的電阻項對 d 軸電壓與 q 軸磁通量的影響,這些新的補償設計進而抑止了系統的暫態影響。
3.3 簡化模型控制
3.3.1 簡化模型結構介紹
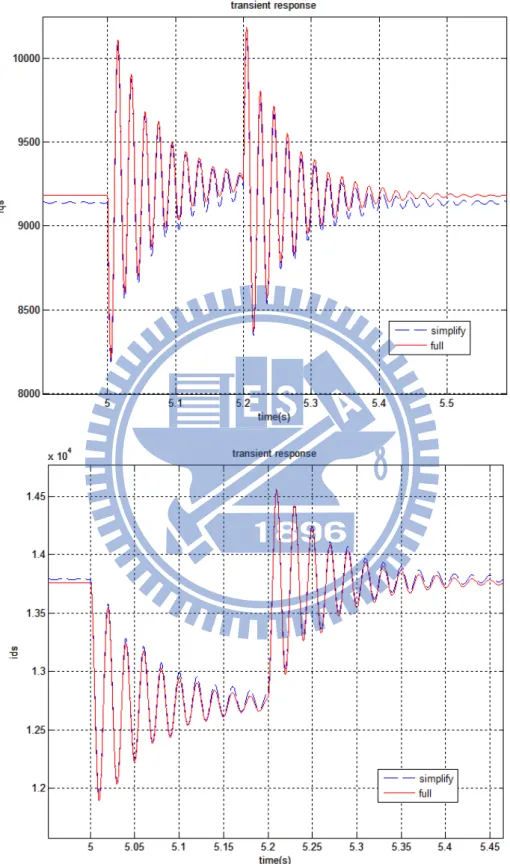
考慮前面所提的定子磁鏈導向控制與其改進方案,由圖3.1的控制方塊圖可 以得知,在設計控制方案時,除了考慮輸入和雜訊相對輸出造成之轉移方程以 外,受控模型使用了FOC之理想狀態,即忽略了定子電阻後使 SFOC 能將定子 電壓與磁通量,分別定於dq軸上,但實際上因電阻參數的影響導向控制並無法如 此完美,如圖3.4所示,使用SFOC將磁通定於d軸時與電壓的角度差並非90度, 這使電壓的分量,有部分會重疊於d軸上而非完全的解耦,因此在暫態響應期間, 當電阻項影響上升時,控制誤差會增加造成電流震盪,此時的控制方塊圖便不符 合實際的系統參數,需要另外考慮。 q 軸 V� ψ� q 軸 d 軸 V� ψ� d 軸 圖3.4 參考座標軸之導向圖37 而在[11]中,作者提出了一種簡化的DFIG電流表示式,並證明了在暫態與對 稱電壓驟降的系統響應上,能很好的表示原本的五階系統,根據其內容能得到一 定子電流的線性轉移方程式。
i
��=
L
(L
�s + R
�)u
��+ ω
�L
�u
�� ��s
�+ 2L
�R
�s + R
��+ ω
��L
��−
(L
�s
�+ R
�s + ω
��L
�)L
�i
��− R
�ω
�L
�i
��L
��s
�+ 2L
�R
�s + R
��+ ω
��L
�� (3.19)i
��=
L
(L
�s + R
�)u
��− ω
�L
�u
�� ��s
�+ 2L
�R
�s + R
��+ ω
��L
��−
(L
�s
�+ R
�s + ω
��L
�)L
�i
��+ R
�ω
�L
�i
��L
��s
�+ 2L
�R
�s + R
��+ ω
��L
�� (3.20) 由式(3.19)、(3.20)能看到定子電流在代入轉子電壓式後的結果,由於式中仍 含有定子與轉子的電壓、電流分項,因此在控制使用上,我們必須做一定的修正 和簡化,代入前面介紹過的定子電壓導向控制,假設定子電壓集中映射於q軸上, 即 u�� = 0;另外觀察分母的電阻平方項,因其量級極小在此可被省略;同樣受 R�ω�L� 所影響的轉子電流項與 (L�s�+ R�s + ω��L�)L�相比,其影響力近乎於 零,經過以上的化簡得到新的關係式。 i�� = (L�s + R�)u�� L��s�+ 2L�R�s + ω��L��− (L�s�+ R�s + ω��L�)L�i�� L��s�+ 2L�R�s + ω��L�� (3.21) i�� = L ω�L�u�� ��s�+ 2L�R�s + ω��L��− (L�s�+ R�s + ω��L�)L�i�� L��s�+ 2L�R�s + ω��L�� (3.22) 式(3.21)、(3.22)即為簡化的電流表示式,可以發現相較於原先的控制模型, 此簡化方式保留了定子電阻的影響,在後面考慮控制點的設定時,系統的暫態響 應能有效的代表五階完整模型的特性,可由圖3.5一平衡三相電壓下降所得之定 子電流暫態得到驗證。38
39 得到新的定子電流簡化關係式後,使用此結果對原先的控制做改進,以下將 分別對一般情況下的穩態控制及電網三相電壓跌落產生的暫態作個別的分析,在 穩態情況下令 s = 0,式(3.20)、(3.21)可化為式(3.23)、(3.24),此時控制點的設 定與原先的設置並無太大不同,皆是希望經由穩態關係式將轉子電流控制於所需 的參考點上,即圖3.2之內部控制迴路。 i�� =ω1 �L� u��− L� L� i�� (3.23) i�� =ωR� ��L��u��− L� L� i�� (3.24) 與前面所使用之SFOC電流公式相比,在q軸電流上多了一電壓的補償項,在 簡化的模型能有效代表完整系統的情況下,相對於傳統的FOC控制,i��考慮了定 子電阻之參數,對系統的穩態工作有改善的作用,代入功率關係,實功與虛功功 率可表示如下, 並以此關係式實現穩態下的功率解耦控制。 P� =32 (ωR� ��L��u��− L� L� i��)u�� (3.25) Q� =32 (ω1 �L�u��− L� L� i��)u�� (3.26) 與式(3.7)類似,實功率關係式僅是多了定子電阻影響的項,因此整個控制迴 路並無太大的變化,其方塊圖的設計也和圖3.1大致相同,只有實功率外部控制 迴路增加了一補償項抵消定子電阻項造成的影響以及根據簡化模型的結果得到 受控模型的新關係式,完整的控制結構圖可如圖3.6、3.7所示。
40 實功率控制迴路: G��(s) = 32ωR� ��L�� G��(s) =32L1 � �s + R� L�� �s�+ 2 R� L�s + ω� �� G�(s)��= �s�+ R� L�s + ω� �� �s�+ 2 R� L�s + ω� �� 虛功率控制迴路: G��(s) =32ω1 �L� G��(s) =32L1 � ω� �s�+ 2 R� L�s + ω� �� 圖3.6 實功率控制迴路圖 圖3.7 虛功率控制迴路圖
41 在圖 3.6 中,可以看到除了實功率迴路多了 G��(s) 的補償項,目標系統的 Plant 也多了一 G�(s)�� 的關係式,在此探討此關係式的影響,圖 3.8 為其波德 圖,由圖中可以得知此關係式僅在 ω� 頻率附近會有變化的產生,因此在穩態 控制時可省略此函數的影響,對輸入至輸出的轉移方程式,可得到與 3.1 節中導 向控制相同的結果。 s�+ R� L�s + ω� � s� + 2 R� L�s + ω� � ≈ 1
3.3.2 內部迴路暫態分析
在得到輸入與輸出之關係式不變的情況下,接著討論實功與虛功外部補償項 造成的影響,考慮平衡電壓驟降下的系統動態,在此可分為內部迴路與外部迴路 兩部分,對內部虛功率控制迴路,根據式(3.21) 圖3.8 G�(s)��之波德圖42 i�� = ω�L�u�� L��s�+ 2L�R�s + ω��L��− L� L� s�+ R� L�s + ω� � s�+ 2 R� L�s + ω� �i�� 在式中可以得到暫態下轉子電流、定子電流、定子電壓三者間的關係,將此式作 等號間的變換,其結果描述了 i�� 在暫態下的表現,並代表了內部控制迴路的輸 出及回授值。 i�� =L1 � ω�u�� s�+ R� L�s + ω� �− L� L� s�+ 2 R� L�s + ω� � s� + R� L�s + ω� � i�� (3.27) 而對內部迴路的參考輸入,根據前面所提的解耦控制,定子電流在穩態下制 定的控制參考如式(3.23) i�� =ω1 �L�u��− L� L� i�� 同樣作等號間的變換,得到內部控制輸入 i��∗ 之關係式 i��∗ = ω1 �L�u��− L� L�i�� (3.28) 在虛功內部控制迴路中輸入值為 i��∗、負回授輸入為 i��,於前面所討論的穩態 情形下,兩者的誤差為零,意即控制器能使輸出有效的控制於參考輸入上,但考 慮電壓驟降之情形,由於其故障時間極短,控制器無法立即穩定於穩態參考點 上,誤差下降過慢的結果,將造成系統的暫態產生劇烈的變化,由式(3.27)與式 (3.28)寫出虛功內部迴路控制器輸入。 E�(s) = i��∗− i��= �ω1 �L�− 1 L� ω� s� + R� L�s + ω� �� u�� −LL� �(1 − s�+ 2 R� L�s + ω� � s�+ R� L�s + ω� � )i�� (3.29) 此關係式中表示了內部 PI 控制器的暫態輸入,由於 �� �� ≪ ω� �,很明顯的可 以看出,在電壓下降的短時間內,定子電壓項會產生近乎電網頻率 ω� 的誤差 訊號,而對定子電流項,其值的變化受控制器的影響,無法完整的描述其暫態的
43 表現,但由前面 G�(s)�� 之波德圖,可以得知在頻率 ω� 以外,其轉移函數的 其影響可視為 1,這表示當 i�� 輸入其他頻段的訊號進入時,其效果將被消除, 因此可假設 i�� 項產生一頻率為 ω� 的暫態,電流項的誤差訊號即受 ω� 影 響,就頻率的觀點來看影響的效果可與定子電壓項視為同一情況。 對實功內部控制迴路,經過相似的運算也可得到控制器的暫態輸入,定子電 壓項的零點對輸出頻率的影響很小,根據前面虛功控制器的輸入分析,同樣將它 視為頻率 ω� 的控制器輸入訊號。 E�(s) = i��∗− i�� = �ω R� ��L�L�− 1 L� s + RL� � s�+ R� L�s + ω� �� u�� −LL� �(1 − s�+ 2 R� L�s + ω� � s�+ R� L�s + ω� � )i�� (3.30) 在式(3.29)與(3.30)中得知了內部迴路控制器的暫態輸入型式,對照控制迴路 圖 3.6 與 3.7,可以發現定子電壓項中參考輸入來自於控制的外部補償,即實功 控制迴路之 G��(s) 與虛功控制迴路之 G��(s) 兩項,由於外部補償的作用乃是 消除控制變數以外的項,針對穩態下提供正確補償使控制運作於正確的點上,理 所當然暫態時便會產生誤差,所以加入一暫態的補償設計。 G��(s) =32L1 � �s + RL� �� �s�+ 2 R� L�s + ω� �� (3.31) G��(s) =32L1 � ω� �s�+ 2 R� L�s + ω� �� (3.32) 即代表控制迴路的補償項將加入一開關,判斷電壓驟降時將補償切至暫態設 計,電壓運作正常時則沿用穩態的設計,如圖 3.9 所示,K 代表實功與虛功下各 自不同的穩態設定點,利用定子電壓作為切換的標準,在使用新的外部補償項後 ,可將式(3.29)、(3.30)中電壓下降造成的暫態項消除,得到新的內部控制器暫態 輸入。
44 圖 3.9 外部補償的控制切換圖 E�(s) = i��∗− i�� = −LL� �(1 − s�+ 2 R� L�s + ω� � s�+ R� L�s + ω� � )i�� (3.33) E�(s) = i��∗− i�� = −LL� �(1 − s�+ 2 R� L�s + ω� � s�+ R� L�s + ω� � )i�� (3.34)