國
立
交
通
大
學
機 械 工 程 學 系
碩 士 論 文
新 式 腹 腔 鏡 手 術 打 結 器 之 研 發
Development of a New Suture Tying Instrument
for Laparoscopic Surgery
研 究 生:謝佑明
指導教授:徐文祥 教授
新式腹腔鏡手術打結器之研發
Development of a New Suture Tying Instrument
for Laparoscopic Surgery
研 究 生:謝佑明 Student:Yu-Ming Hsieh 指導教授:徐文祥 Advisor:Wen-Syang Hsu 國 立 交 通 大 學 機械工程學 系 碩 士 論 文 A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering July 2010
Hsinchu, Taiwan, Republic of China
新式腹腔鏡手術打結器之研發
學生:謝佑明 指導教授:徐文祥 國立交通大學機械工程學系碩士班 摘要 本論文主要是研發可用於腹腔鏡手術的新式縫線打結器。傳統的 體內打結法因腹腔內空間狹小,致使纏繞與拉緊縫線的動作不易操 作;體外打結法又因縫線拉出體外纏繞而有耗時與縫線消耗較大的問 題,故本研究主要目標為設計出容易操作的腹腔鏡手術縫線打結器與 其打結方法。此新式縫線打結器透過簡單的雙卡榫設計,讓縫線於體 外以特定方向預先纏繞活結於打結器上,再置入體內以輔助器械配合 操作推結與拉緊縫合的步驟。此新式打結器相較於傳統體內打結法, 能免於操作體內複雜的纏繞流程,大大降低體內打結難度;而相較於 體外打結則更省時也同時節省縫線使用量。在此以簡易的實體原型模 擬實際打結流程,以確認所提出設計的可行性,並探討操作測試結果。Development of a New Suture Tying Instrument for Laparoscopic Surgery
Student:YuMing Hsieh Adivsor:Wensyang Hsu Department of Mechanical Engineering
National Chiao Tung University
ABSTRACT
Here a new suture tying instrument for laparoscopic surgery is proposed and design. Because of the narrow abdominal cavity, motions like winding and ligating are hard to perform in traditional intracorporeal tying method .By winding suture out of abdominal cavity, extracorporeal tying method also consumes more operation time and more suture.
Therefore, an easy-operative suture tying instrument and method of tying a suture for laparoscopic surgery is developed here. The new suture tying instrument which has dual latched design can pre-tied the square knot out of abdominal cavity in a specific way. The instrument is put into
abdominal cavity for operating knot pushing and ligating in coordinate with an assistant grasper. The new suture tying instrument can greatly reduce the difficulty in operating tying procedure rather than
intracorporeal tying method. Also the new instrument saves more time and more suture than extracorporeal tying method. Here a simple
prototype is built for simulating tying procedure to verify the feasibility of the proposal design.
誌謝
研究所兩年的生涯,一下子就飛逝過去了。首先,當然要感謝徐文祥 老師於研究過程中,不斷給與我研究的方向與指導,讓我一直能尋找 到我的目標。感謝博班家聖、 骏偉、毅家、元德等學長實驗儀器操作 的教導與傳授;感謝一全,盈斌一同操作機台的協助與過程。頭博、 胖虎、小高、TERU 與小熊學長,感謝你們於我剛進實驗室時帶領我 了解並進入這個環境;GEIGEI、MIKE、小江、法師與小鐘,有你門一 起奮鬥的過程也是我開心的日子。至於學弟們:小潘、馬彬、葉挺、 芋頭,也感謝你們後期的協助,並祝福你們也能如期畢業。最後感謝 常廣的立德兄,我的研究有你們公司的支持才能成功。 最後的最後,我要將這篇誌謝獻給兩個人。一個是我父親,沒有他從 小把我培養長大,並灌輸我學習的觀念,我今天一定不會在這裡。令 一個人是我女朋友"琬鈞”,沒有她常期的陪伴,成功的滋味就不會 甜美,我也不會努力至今。在此,對於你們兩位,致上崇高無比的感 激。佑明 2010 初夏 風城
目次
頁次 中文摘要………i 英文摘要……… ii 誌謝………iii 目次……… iv 圖目錄………vi 一、 序論………1 1.1 研究背景與動機………1 1.2 文獻回顧………4 1.2.1 體內打結法………4 1.2.2 改良式體內打結法………6 1.2.3 體外打結法………8 1.2.4 改良式體外打結法………9 二、 研究目標………11 2.1 體內與體外打結法的問題探討………11 2.2 訂定研究目標………11 三、 規格訂定與原型設計………12 3.1 規格訂定………12 3.2 平結形成的動作與條件………12 3.3 第一種原型設計………15 3.4 第二種原型設計………21 四、 原型操作測試………29 4.1 第二種原型操作測試………29 4.2 第二種原型優缺點分析………39 五、 結論與未來工作………41 5.1 第一種原型討論………41 5.2 第二種原型討論………415.3 未來工作………41 參考文獻………43
圖目錄
圖 1 標準腹腔鏡手術外觀圖………2 圖 2 單一切口微創腹腔鏡手術外觀圖………3 圖 3 傳統腹腔鏡體內打結器………4 圖 4 縫線置入體內示意圖………5 圖 5 以主夾具纏繞 C 型圈套示意圖………5 圖 6 以輔助夾具夾取縫線另一端示意圖………5 圖 7 縫線兩端拉緊示意圖………6 圖 8 改良式縫線打結器 Easynot………7 圖 9 Easyknot 將纏繞後的縫線固定住示意圖………7 圖 10 將縫線拉出體外示意圖………8 圖 11 以雙手在體外將結纏繞成型示意圖………8 圖 12 以推結器將活結推入體內示意圖………8 圖 13 改良式體外縫線打結器示意圖………9 圖 14 改良式縫線打結器推結圖………10 圖 15 各式套管的規格圖………12 圖 16 縫線打結器的規格訂定示意圖………12 圖 17 縫線穿刺縫合部位示意圖………13 圖 18 繩 A 疊上繩 B 示意圖………13圖 19 繩 A 疊於繩 B 後方示意圖………13 圖 20 繩 A 再度疊上繩 B 示意圖………14 圖 21 兩繩拉緊示意圖………14 圖 22 條件 a 說明圖………14 圖 23 單孔雙根式體內打結器………15 圖 24 縫線夾頭示意圖………15 圖 25 輔助夾具機械構造示意圖………16 圖 26 主夾具機械構造示意圖與側視圖………16 圖 27 套筒構造示意圖………17 圖 28 夾爪 A 夾取縫線並旋轉動作圖………17 圖 29 夾爪 B 移動後示意圖………18 圖 30 夾爪 B 旋轉半圈示意圖……… 18 圖 31 夾爪 B 旋轉一圈示意圖………18 圖 32 套筒推近示意圖………19 圖 33 第一種原型設計條件 a 達成示意圖………20 圖 34 第一種原型設計尺寸規劃圖………20 圖 35 單根雙卡榫縫線打結器………21 圖 36 卡榫部位放大圖………21 圖 37 縫線預先纏繞示意圖………22
圖 38 打結器縫線預先纏繞示意圖………22 圖 39 卡榫部分逢線纏繞示意圖………22 圖 40 縫線穿刺縫合部位示意圖………23 圖 41 輔助夾具推結示意圖………24 圖 42 將活結推離打結器示意圖………24 圖 43 活結拉緊示意圖………25 圖 44 第二種原型設計平結形成動作一示意圖………26 圖 45 第二種原型設計平結形成動作二示意圖………27 圖 46 第二種原型設計平結形成動作三示意圖………27 圖 47 第二種原型之簡易模型外觀圖………29 圖 48 固定縫線之簡易機構放大圖………30 圖 49 尼龍線第一次疊上打結器示意圖………30 圖 50 尼龍線第二次疊上打結器示意圖………31 圖 51 尼龍線第三次疊上打結器示意圖………32 圖 52 簡易機構固定縫線示意圖………32 圖 53 縫針開始穿刺開口示意圖………33 圖 54 縫針穿刺完開口示意圖………33 圖 55 打結器微向上拉示意圖………34 圖 56 打開簡易固定活結的機構示意圖………34
圖 57 輔助器械扣住尼龍線圓環部份示意圖………35 圖 58 輔助器械開始推動活結示意圖………36 圖 59 輔助器械將活結推離打結器示意圖………36 圖 60 輔助器械持續推動活結示意圖………37 圖 61 輔助器械推動活結至靠近開口處示意圖………37 圖 62 輔助器械改夾有針一端的尼龍線示意圖………38 圖 63 活結拉緊完成縫合示意圖………38 圖 64 輔助器械與打結器夾角示意圖………40
一、緒論
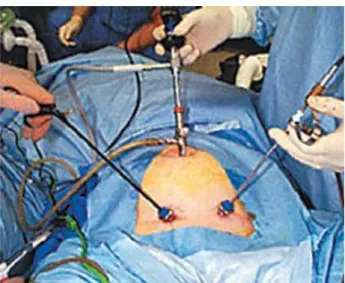
1.1 研究背景與動機 “內視鏡手術(Endoscopic surgery)”為目前一般外科手術非 常熱門的一項技術。有別於一般外科手術須將手術部位切開一個大 洞,內視鏡手術只需於身體表面開設數個 5mm 至 1cm 的小圓洞,然 後灌氣體進入腹腔內以擴大手術空間,並用套管(Trocar)將洞口套 封住,再把手術過程所需的器械插入圓洞,針對欲實施手術的部位 進行操作,手術完畢再拉出器械即可。套管的功能有兩個:除了封 住體內的氣體使灌入的空氣不會洩漏外,手術器械的進出也需透過 套管。相較於傳統外科手術傷口大、感染風險高與病患術後復原慢 的特性,內視鏡手術可降低患者受感染風險且具有術後傷口復原快 等優點,故近年來蔚為風潮。內視鏡手術主要分為一般手術與病理 檢查兩大類,且按照手術部位的不同而有不同的名稱;如實施於腹 腔稱為腹腔鏡手術,實施於胸腔則稱為胸腔鏡手術。內視鏡手術是 一種“微創手術(Minimally invasive surgical procedure)”, 可有效降低手術帶來的傷害與風險。圖 1 為標準腹腔鏡手術的外 觀。此手術開設三個孔洞,一個孔洞主要是放鏡頭(Camera),另兩圖 1 標準腹腔鏡手術外觀圖(資料來源:雅虎奇摩網頁 http://www.yetvu.com/) 個孔洞則放置手術器械來進行手術操作。內視鏡手術中最早被普遍 應用的為腹腔鏡手術(Laparoscopic surgery),特別是針對女性子 宮腔的病變處理;子宮內膜異位(Endometriosis)-俗稱巧克力囊腫 (Chocolate cysts),其切除手術就是腹腔鏡手術應用的常例之一。 腹腔鏡手術過程中時常需要利用可吸式縫線做特定部位的縫合打 結,然而縫合打結的動作卻不容易操作。受限於腹腔內狹小的手術 空間與不良的視野,多數資淺的外科醫師不易於短時間完成縫線打 結的動作,更遑論多次打結的流暢性。近年來,醫界提出一種新式 的腹腔鏡手術,稱為“單一切口微創腹腔鏡手術”。此手術不同於 傳統開設數個孔洞於腹腔的方式,而是直接從肚臍切一直徑約 2mm 的孔洞,所有手術器械由此孔進出操作。如此一來,傷疤隱藏於肚 臍內,使患者術後皮膚更為美觀,且整體傷口面積更小於傳統腹腔
鏡手術,患者術後復原時間更短。但可想而知的是,所有的手術器 械只從肚臍進出,器械能操作的角度更小,手術難度更加提高,打 結縫合的動作也就更加困難。身為機械的專業人員,如果能透過適 當的器械機構設計,降低腹腔鏡手術下縫線打結的難度,那麼必能 提高腹腔鏡手術的應用範圍與普遍性,降低手術成本,進而創造更 美好的醫療品質。而好的手術器械本身也是有賣點的產品,能提供 良好的利潤。圖 2 為台北醫學大學附設醫院進行單一切口微創腹腔 鏡手術的外觀圖。 圖 2 單一切口微創腹腔鏡手術外觀圖(資料來源:聯合報 2009 年 11 月 25 日)
1.2 文獻回顧 在腹腔鏡手術底下,縫線打結的方法主要分成四類,分別為: 體內打結法 改良式體內打結法 一般體外打結法 改良式體外打結法 以下將分別介紹這四種腹腔鏡手術打結法。 1.2.1 傳統體內打結法 傳統的體內打結法所需要的打結器有兩根,分別為主夾具 (Needle holder)與輔助夾具(Assistant grasper),如圖 3。一般
圖 3 傳統腹腔鏡體內打結器[1]
外科醫師會以慣用手操作主夾具,以另一隻手操作輔助夾具進行縫 線打結。首先以主夾具夾住有針頭一端的縫線,透過直徑 10mm 或 更大直徑的套管塞入體內,如圖 4,然後以針頭穿刺欲縫合部位,
圖 4 縫線置入體內示意圖[1] 接著從另一孔洞置入輔助夾具,完成縫線打結的準備動作。再來以 主夾具夾住縫線的一端,並將縫線纏繞在輔助夾具上來形成一 “C” 型圈套,如圖 5。C 型圈套完成後,以輔助夾具前端(Tip)夾 嘴夾住縫線的另一端並往後拉,如圖 6,結的形狀就完成了。最後 主夾具及輔助夾具分別將縫線的兩端拉緊,如圖 7,固定住縫 圖 5 以主夾具纏繞 C 型圈套[1] 圖 6 以輔助夾具夾取縫線另一端[1]
圖 7 縫線兩端拉緊[1] 合的部位,至此第一個結完成。這一連串打結的動作看似簡單,其 實不然。因人體腹腔內空間狹小,要操作主夾具與輔助夾具做縫線 纏繞與拉緊的動作時,兩根夾具很容易互相碰撞,操作不易。而且 縫線的材質為尼龍線,纏繞的過程縫線時常從輔助夾具上滑落,並 不容易固定於輔助夾具上,更增加了操作的困難。而視縫線尺寸的 不同,醫師需要重複打結的次數也不相同,多次打結的動作也是拖 延整體手術時間的主因之ㄧ。Dulucq[2] 與 Bruce[3]及 Conor[4]等人 也提到體內打結須反覆練習才可能順利操作。
1.2.2 改良式體內打結法
為了克服傳統式體內打結法纏繞好的縫線易滑落的問題,德國 一間開發腹腔鏡手術器械的公司與美國芝加哥兩位醫師合作研發 一改良式體內縫線打結器解決縫線易滑落的問題。打結器的外觀如
圖 8。此改良式縫線打結器品牌名稱為 MAHE[5],而器械名稱為 圖 8 改良式縫線打結器 Easynot[5] Easyknot[5]。該打結器具有兩個縫線夾頭,能使主夾具在纏繞縫線 於 Easyknot[5]的過程中,固定縫線,使纏繞好的縫線不易滑落,藉 此降低體內縫線打結的難度。圖 9 為縫線纏繞於 Easyknot[5]的模 圖 9 Easyknot 將纏繞後的縫線固定住[5] 樣,可以清楚看見纏繞後的縫線會被離前端較遠的縫線夾頭固定, 因而不易滑落造成打結失敗。此改良式體內打結器構想極佳,但因 沒有解決體內夾具易相互碰撞的問題,實際產品推出後,多數的外 科醫師仍覺得操作不易,因此沒有被廣泛使用。
1.2.3 一般體外打結法 一般體外打結法的操作方式如下:首先利用手術夾具將兩端縫 線拉出體外,如下頁圖 10,並請助手以食指塞住套管的開口,如圖 10 中*號處,防止體內氣體洩漏。然後在體外以雙手纏繞縫線來形 成所需的活結,如圖 11,並將活結縮減至不超過套管直徑的範圍。 接著再使用一種手術器械“推結器(Knot pusher)”將未拉緊的活 結透過套管推入體內靠近欲縫合的部位,如圖 12,然後退出推結 器,改放入縫線打結器,把活結拉緊即完成打結動作。體外打結法 圖 10 將縫線拉出體外[6] 圖 11 以雙手在體外將結纏繞成型[6] 圖 12 以推結器將活結推入體內[6]
因不需於體內纏繞縫線,故大大降低了打結難度,但也引申出其他 問題。首先把縫線拉出體外做纏繞與推入活結的步驟都加長了手術 時間;其次,推結過程容易因推入的角度及施力的大小不均等問題, 造成推結不順,甚至活結因此而脫落需重新纏繞。再者,由於縫線 需拉出體外操作,增加了縫線使用的長度,而醫療用之可吸式縫線 價錢不低,多次手術下來消耗的成本十分可觀。 1.2.4 改良式體外打結法 為了減少體外打結法所耗費的時間,一改良式體外縫線打結器 於 1998 年在美國專利與商標局申請專利,如圖 13。此改良式體外 縫線打結器主要是透過特殊形狀的設計,將“縫線導引部位”整合 圖 13 改良式體外縫線打結器[7] 於縫線打結器上。改良式縫線打結器可直接以雙手將縫線穿過縫線 導引部位,使活結於推結的過程中縫線能固定於打結器的縫線夾頭 內,如圖 14,並且於活結靠近縫合部位時,直接以縫線打結器前端 的縫線夾頭將活結拉緊並固定住,不需另外再置入縫線打結器來完
圖 14 改良式縫線打結器推結圖[7] 成打結的動作。此改良式體外縫線打結器透過整合推結與拉緊活結 的功能,確實減少了手術時間;但因為縫線始終是拉出體外以雙手 來纏繞成型的,所以縫線需大量消耗這點還是沒有改善,亦即手術 成本依然很高。另外 Fung[8]也有發表類似功能的整合型縫線打結 器,但也存在著縫線消耗量大的問題。
二、研究目標
2.1 體內與體外打結法的問題探討 總結腹腔鏡手術打結法與打結器的種類來看,體內打結主要的 問題是不易操作,因為兩根縫線打結器容易於腹腔內相互碰撞;而 纏繞好的縫線也不容易固定於打結器上。如果在單一切口微創腹腔 鏡手術底下,體內打結的難度想必只有更高而不會更低。而體外打 結會消耗大量縫線,造成手術成本增加;且縫線拉出體外纏繞活結 再推入體內的流程,使手術時間拉長,對病患相對不利。推結時也 因推入角度及施力大小不同,可能造成推結不順甚至活結脫落的問 題。 2.2 訂定研究目標 基於上述體內打結法與體外打結法的探討,我們的研究目標 就是研發一單孔腹腔鏡手術底下,可簡易完成體內縫線打結的打結 器與使用該打結器打結的方法。使利用此新式體內縫線打結器的外 科醫師皆能輕鬆完成體內縫線打結的操作,縮短手術時間,提升整 體醫療品質。三、規格訂定與原型設計
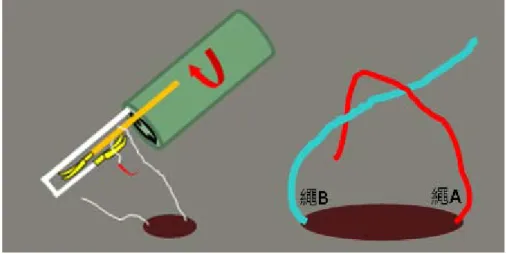
3.1 規格訂定 腹腔鏡手術縫線打結器規格的訂定主要受限於套管的直徑大 小,因為縫線打結器進出人體腹腔都是透過套管的內徑。而目前腹 腔鏡手術使用的套管其直徑主要有兩種規格:5-6mm 與 10-12mm。 其中 10-12mm 為目前主流,少部分腹腔鏡手術才會用到 5-6mm 的套 管,因此我們縫線打結器前中段的直徑大小以 10mm 為主要規格。 圖 15 為各種套管的規格示意圖;圖 16 則為縫線打結器前中段的規 格訂定標示圖。 圖 15 各式套管的規格[9] 圖 16 縫線打結器的規格訂定[9] 3.2 平結形成的動作與條件 首先必須釐清一個正確的平結是透過怎樣的纏繞方式形成,才 能設計出相應的機械構造來完成打結的動作。在此將腹腔鏡手術底下平結的形成分成四動作一條件,以下逐一詳加說明。首先縫線需 透過針頭穿刺縫合部位,形成如圖 17;定義將穿刺完縫合部 圖 17 縫線穿刺縫合部位示意圖 位左端的縫線稱作繩 B,右端的縫線稱作繩 A,這樣預備動作即完成, 再來開始分析說明平結形成的四個動作。動作一,繩 A 疊上繩 B;動 作二,繩 A 疊於繩 B 後方;動作三,繩 A 再度疊上繩 B;動作四,兩 繩拉緊。這四個動作分別依序以圖 18 至圖 21 表示。而平結 圖 18 繩 A 疊上繩 B 圖 19 繩 A 疊於繩 B 後方
繩B
繩A
圖 20 繩 A 再度疊上繩 B 圖 21 兩繩拉緊 形成的四個動作裡,在進行動作二時,有一個條件必須加以說明, 在此稱這個條件為條件 a。如圖 22 所示。在進行完動作一後,定 圖 22 條件 a 說明圖 義繩 B 連接縫合部位的一端稱做“固定端”,而懸空的一端則稱作 “夾取端”。進行動作二時,繩 A 必須往繩 B 固定端的方向疊於繩 B 後方,如圖 22 左半部份所示,之後進行動作三與動作四平結方能形 成;如果繩 A 疊往繩 B 夾取端的方向,如圖 22 右半部份所示,則之 後平結就不能正確形成。了解上述平結形成過程的動作與條件分析 後,接著就可以針對各動作與條件,設計出相對應的機械構造來執 行。綜合以上分析,打結器所需具備的機械構造有:
可執行繩 A 疊上繩 B 的機械構造 可執行繩 A 疊於繩 B 後方並達成條件 a 的機械構造 可執行繩 A 再度疊上繩 B 的機械構造 可執行兩繩拉緊的機械構造 3.3 第一種設計 第一種新式腹腔鏡體內縫線打結器為單孔雙根,其器械設計外 觀如下頁圖 23,在此將說明此器械的運作方式,並介紹使用此器械 如何完成一個平結的動作流程。圖中此新式打結器具備兩根夾爪, 圖 23 單孔雙根式體內打結器 一根叫做輔助夾爪,另一根稱為主夾爪,主夾爪與輔助夾爪前端都 具有可以夾取縫線的縫線夾頭,如圖 24。輔助夾爪的機械構造設計 圖 24 縫線夾頭示意圖 是可以讓該夾爪前半段旋轉 180 度,使縫線夾頭方向改變,如圖 25;
輔助夾爪除了前端的縫線夾頭與旋轉的機械構造外,其餘構造皆固 圖 25 輔助夾具機械構造示意圖 定不動。主夾爪除了前端的縫線夾頭可夾取縫線外,整隻主夾爪也 可以前後做直線移動,並且以輔助夾爪的縫線夾頭為主軸做旋轉; 可旋轉的範圍是 360 度,如圖 26。在主夾爪繞著輔助夾爪做旋轉運 圖 26 主夾具機械構造示意圖與側視圖 動時,輔助夾爪是完全固定不動的,且主夾爪旋轉到上方輔助夾爪 “ㄈ”字型的構造裡面時,該輔助夾爪ㄈ字型構造的空間大小剛好 允許主夾爪通過,故主夾爪是可以前後移動與整隻做轉動的。最後 則是包圍主夾爪與輔助夾爪的套筒。套筒內部輔助夾爪與主夾爪穿 透過的部分是挖空的,但其餘部分為實心設計,故套筒可以前後移 動,如圖 27。至此整個器械的機械構造概念與運動方式大抵設計完
圖 27 套筒構造示意圖 成,接下來將介紹此種新式腹腔鏡體內打結器的使用方法。這裡將 此新式體內打結器的輔助夾爪稱做“夾爪 A”,主夾爪則稱做“夾爪 B”,以利後面文章的描述。一開始將此新式體內打結器透過套管置 入體內後,先以夾爪 A 前端的縫線夾頭夾取有針頭一端的縫線,並 讓夾爪 A 做 180 度的旋轉,如圖 28;然後讓夾爪 B 往後方移 圖 28 夾爪 A 夾取縫線並旋轉動作圖 動,使夾爪 B 前端縫線夾頭的位置不超過夾爪 A ㄈ字型構造最前面 的部分,如圖 29,如此夾爪 B 才能繞著夾爪 A 的縫線夾頭做旋轉。
圖 29 夾爪 B 移動後示意圖 接著夾爪 B 以夾爪 A 的縫線夾頭為軸心,繞著夾爪 A 的縫線夾頭旋 轉一圈,使縫線纏繞於夾爪 B 上,夾爪 B 再以前端縫線夾頭夾取縫 線的另一端。圖 30 為夾爪 B 旋轉半圈時的示意圖,圖 31 則為夾爪 B 圖 30 夾爪 B 旋轉半圈示意圖 圖 31 夾爪 B 旋轉一圈示意圖 轉完一整圈並夾取另一端縫線的示意圖。最後夾爪 B 往後方套筒內 移動形成活結,同時套筒往前推,如下頁圖 32,將活結推近縫合部
圖 32 套筒推近示意圖 位來完成打結動作,至此整個打結縫合即操作完成。接下來將說明 各個操作步驟與平結形成四動作一條件的關連性。首先須說明,夾 爪 B 最後是夾取無針一端的縫線後做移動,故筆者視夾爪 B 為該端 縫線的延伸,即夾爪 B 整根就像是無針一端的縫線本體。所以當夾 爪 A 夾著有針一端的縫線作旋轉時,就形成縫線第一次疊上夾爪 B, 也就是完成動作一。而當夾爪 B 旋轉半圈時,縫線疊上夾爪 B 第二 次,故完成動作二。當夾爪 B 旋轉完一整圈時,縫線第三次疊上夾 爪 B,故完成動作三。最後夾爪 B 向後拉形成活結,同時套筒往前推, 使活結拉緊於縫合部位,即完成動作四。至於條件 a 則是在夾爪 B 旋轉半圈時就達成了,在此以圖 33 來說明。由於夾爪 A 有做
圖 33 第一種原型設計條件 a 達成示意圖 旋轉 180 度的動作,使夾爪 B 繞著夾爪 A 的縫線夾頭旋轉半圈時, 形成如圖 33 左半部分的樣貌;其中我們可視有針頭一端的縫線為繩 A,無針一端的縫線與夾爪 B 整體可連在一起視為繩 B,其示意圖就 如圖 33 右半部分的樣貌。而前面 3.2 節已說明過,圖 33 右半部分 的纏繞方式是可以形成平結的,故條件 a 達成無誤。此原型設計的 細部機構及尺寸規劃如圖 34 所示,其中夾爪 A 旋轉部分與前端縫線 圖 34 第一種原型設計尺寸規劃圖
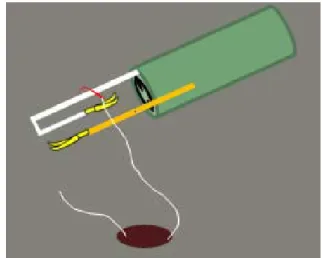
夾頭是靠鋼線來帶動。在此發現,於整體打結器直徑不超過 10mm 的 範圍內,夾爪 A 與夾爪 B 的直徑就不能超過 2mm;但這樣的夾爪其鋼 性必然有問題,故此種設計的可行性不高,因而有了第二種設計。 3.4 第二種設計 第二種設計其外觀如圖 35 所示,在此稱其為單根雙卡榫縫線 打結器。圖 36 為圖 35 打結器中間卡榫部位的外型放大圖。其 圖 35 單根雙卡榫縫線打結器 圖 36 卡榫部位放大圖 中卡榫 1 與卡榫 2 分別位於打結器的上、下方,且卡榫 1 與卡榫 2 中間皆有一小孔供縫線穿過。以下將說明使用此打結器打結的步 驟,並同時說明各步驟與平結形成四動作一條件之間的關係。不同 於第一種原型設計在體內纏繞縫線,此單根雙卡榫打結器是先在體 外把縫線纏繞於打結器上才透過套管置入體內。纏繞的步驟如圖 37 所示。首先以此新式打結器前端縫線夾頭夾住有針一端的縫線,
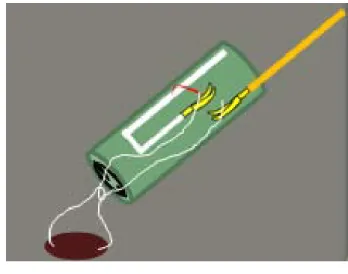
圖 37 縫線預先纏繞示意圖 然後將無針一端的縫線穿過卡榫 1 中間的空隙。接著將穿完卡榫 1 的縫線直接再穿過卡榫 2 的空隙,使縫線又繞回到打結器前方。最 後將縫線拉到後方握柄處以特定機構固定住,而纏繞好的縫線受限 於卡榫不會隨意移動或脫落,至此縫線預先纏繞的步驟即大功告 成。圖 38 為打結器預先纏繞縫線完畢的外型示意圖,同時圖 39 為 圖 38 中間卡榫部分逢線纏繞完畢放大圖。接著將此縫線打結器透 圖 38 打結器縫線預先纏繞示意圖 圖 39 卡榫部分逢線纏繞示意圖 過套管置入體內,並以有針頭一端的縫線穿刺過縫合部位,形成如 下頁圖 40。一般而言,進行傳統腹腔鏡或單一切口腹腔鏡手術時,
圖 40 縫線穿刺縫合部位示意圖 除了基本會有的鏡頭外,同時會有另外兩組手術器械來進行手術部 位的操作。其中一組是主要操作器械,針對手術部位進行目的性操 作,例如對手術部位實施電燒或是切割等動作;另一組為輔助操作 器械,是配合主要操作器械動作上的需求,從旁予以輔助,例如固 定或夾取手術部位等動作。因此當打結器穿刺完畢後,我們以輔助 操作器械,通常為手術夾,把打結器上事先纏繞好的縫線往縫合部 位方向推動,如圖 41。輔助器械以前端夾嘴部份扣住卡榫 1 與卡榫 2 中間段之縫線,然後往縫合部位推進,使縫線脫離卡榫並形成一活
圖 41 輔助夾具推結示意圖
結。接著輔助器械持續往前推,同時打結器往反方向後拉,使活結 整個從打結器上脫出,如圖 42 所示。最後,以輔助器械把活結推
圖 42 將活結推離打結器示意圖
住有針一端的縫線,並使輔助器械挾持的位置越靠近縫合部位越 好;然後打結器整根往上拉,活結即拉緊,完成縫合步驟,如圖 43 所示。以上為第二種原型設計的縫合步驟,接下來將說明 圖 43 活結拉緊示意圖 各步驟與平結形成四動作一條件的關連性。如同第一種原型設計, 在此須先說明一點:此新式打結器在穿刺完縫合部位後,仍以前端 縫線夾頭夾取有針一端的縫線,故可視整根打結器與有針一端的縫 線為一體。有了這個前提,往後的說明將更加容易理解。事實上, 打結器在體外纏繞縫線的動作,就是完成平結形成的動作一到動作 三的部份。如圖 44,當無針一端的縫線穿過卡榫 1 時,形成圖 44
圖 44 第二種原型設計平結形成動作一示意圖 上半部的模樣;由於整根打結器可視為有針一端縫線的延伸,因此 打結器本身如同圖 44 下半部分的繩 B,而無針一端的縫線則是繩 A, 那麼繩 A 疊上繩 B 的動作確實有達成,故完成動作一。同理,當無 針一端的縫線穿完卡榫 1 後,又從打結器後方穿過卡榫 2 時,縫線 第二次疊上打結器,完成動作二,如圖 45。最後將穿完卡榫 2 的縫
圖 45 第二種原型設計平結形成動作二示意圖
線拉至握柄部分固定住時,同時形成縫線第三次疊上,如圖 46 所示。
圖 46 第二種原型設計平結形成動作三示意圖
至於條件 a 的部份,則是透過卡榫 2 設計的位置比卡榫 1 更靠近前 端的縫線夾頭,使操作者按照穿過卡榫 1 再穿過卡榫 2 的順序來纏
繞縫線,達成正確纏繞方向,故條件 a 也成立。最後動作四的部份, 則是在打結器置入體內後,以另一輔助手術器械推結拉緊來執行, 以上就是第二種原型設計達成平結四動作一條件的說明。
四、原型操作測試
4.1 原型操作測試 在此針對第二種設計的部份,進行簡易的實體模型操作測 試,並進一步說明測試結果。第二種設計的簡易原型其外觀如圖 47, 圖中的模型是透過改造基本腹腔鏡手術夾所形成。縫線的 圖 47 第二種設計之簡易模型外觀圖 材質以最接近醫療用可吸式縫線的尼龍線代替,而縫針則是一般的 縫針。圖 47 圈起部分為模擬第二種設計中,用來固定纏繞完的縫線, 也就是卡榫 1 與卡榫 2 的部份,其放大外觀如圖 48 所示。圖 48 中 白色絨布塊代表簡易固定縫線的機構,以模擬卡榫 1 與卡榫圖 48 固定縫線之簡易機構放大圖 2 固定纏繞好的活結。接下來將說明圖 48 中的活結是如何纏繞上 去。一開始令模擬固定簡易機構的白色絨布塊為打開狀態,並以手 將無針一端的尼龍線疊上打結器白色絨布塊的位置,如圖 49 所 圖 49 尼龍線第一次疊上打結器示意圖 示,即形成尼龍線第一次疊上打結器。圖中銀白色鐵夾用以壓住尼 龍線防止其亂翹,使讀者能看的更清楚。再來以手將尼龍線繞回到 打結器前面,形成尼龍線第二次疊上打結器,如圖 50 所示。必需特
別說明的是,尼龍線第二次疊上打結器的方向,是往靠近打結器前 圖 50 尼龍線第二次疊上打結器示意圖 端夾嘴的方向,而不是往握柄部分的方向疊上。原本第二種原型設 計是透過卡榫 1 與卡榫 2 的位置擺設及纏繞順序,使縫線纏繞時必 然依照上述方向;但這裡以簡易機構代替卡榫 1 與卡榫 2,故纏繞時 須特別注意到方向問題。接著再將尼龍線第三次疊上打結器,形成 如下頁圖 51。
圖 51 尼龍線第三次疊上打結器示意圖 最後將白色絨布塊蓋上以固定纏繞好的活結,如圖 52 所示,並將無 針一端的縫線拉至打結器靠近握柄處予以固定,整個打結器就形成 圖 52 簡易機構固定縫線示意圖 如圖 47 一般。接著開始說明實際打結的操作流程。在此以黑布上一 小開口模擬欲縫合的傷口,並以此簡易原型進行縫合打結。首先以
慣用手操作打結器將縫針穿刺黑布上的小開口,並在逢針穿刺完畢 後將打結器微向上拉,然後打開固定打結器上活結的簡易機構。以 上操作步驟依序以圖 53 至圖 56 表示。
圖 53 縫針開始穿刺開口
圖 55 打結器微向上拉 圖 56 打開簡易固定活結的機構 接下來以另一隻手操作輔助器械開始進行推結的動作。輔助器械前 端夾嘴扣住尼龍線活結圓環的部份,並往開口方向推,扣住的位置 就如同第二種原型設計中輔助夾具扣住卡榫 1 與卡榫 2 中間段的縫 線;而同時整根打結器向上拉起,使活結從打結器上脫落。當活結
從打結器上脫落後,持續以輔助器械推動活結直到靠近開口處,此 時輔助器械前端夾嘴放開尼龍線圓環部份,改夾住靠近縫合部位有 針一端的尼龍線,然後整根打結器向上拉,尼龍線即拉緊形成一平 結,將黑布上之開口縫合起來。上述之步驟則分別依序以圖 57 至圖 63 表示,至此整個第二種原型設計的簡易模型實體操作即告完成。 圖 57 輔助器械扣住尼龍線圓環部份
圖 58 輔助器械開始推動活結
圖 60 輔助器械持續推動活結
圖 62 輔助器械改夾有針一端的尼龍線
經過數次原型的實際操作,在此將結果做一條例式說明。 一、從穿刺開口到最後拉緊尼龍線縫合,大約只需一分半左右的時 間,其整體操作難度不高,符合設計期望。 二、固定活結的簡易機構設計,其位置離打結器前端夾嘴越近越好, 可縮短輔助器械推結至開口的時間,進而減少整體縫合所需時 間。 三、使用一般縫針進行開口穿刺較實際腹腔鏡手術不易。因一般縫 針為長條狀,穿刺過程易卡住;而腹腔鏡手術用的縫針為彎鉤 狀,較有利於穿刺動作,更能縮短縫合所需時間。 總結來說,第二種原型設計的簡易實體操作測試符合預期效益。 4.2 第二種原型優缺點分析 在此分析第二種原型的優點與缺點,其中優點部分如下: 優點一:第二種原型設計為單根式器械,進出人體腹腔所需空間小, 符合單一切口微創腹腔鏡手術的需求,當然傳統腹腔鏡手 術也很適用。 優點二:於體外預先纏繞活結再置入體內的設計,使操作者免於執 行縫線體內纏繞的部分,大大降低打結的難度,增加腹腔 鏡手術使用的廣泛度,提升醫療品質,也縮短手術時間, 降低患者受感染風險。
優點三:輔助器械要推動活結時,是以近似平行打結器的狀態來推 動;換句話說,輔助器械與打結器所夾角度極小,如圖 63 所示。於單一切口微創腹腔鏡手術下,所有的手術器械均 圖 64 輔助器械與打結器夾角示意圖 由同一孔洞進出,導致手術器械所能操作的角度有限,故本 設計此項優點就非常適用在如單一切口微創腹腔鏡手術這 樣的條件下。 優點四:相較於體外打結法,此新式打結器所消耗的縫線量更少; 多次操作下來,能降低不少手術成本。 接著說明第二種原型的缺點部分: 缺點一:輔助器械推動活結時,其前端夾嘴必須控制在扣住縫線圓 環的位置,也就是卡榫 1 與卡榫 2 中間段的縫線,推結比 較能順利進行,故操作上需稍加練習方能順利執行。 缺點二:相較於體內打結,縫線的消耗量仍較多。
五、結論與未來工作
5.1 第一種原型討論 第一種原型設計透過雙根夾爪良好的位子配置設計,使縫線在 體內纏繞時夾爪不會互相碰撞,順利將結打好。但目前受限於套管 的直徑大小,此打結器規格仍難以符合手術需求,因此暫不適用。 但如果持續構想不同新的機構或設計,則此打結器仍有改善與發展 的機會。 5.2 第二種原型討論 第二種原型設計能在 5mm 直徑的套管進出操作,符合規格訂 定。且經過實際測試,整體打結流程難度不高,即使如筆者般非醫 療專業人員,也只需操作數次即能在一分半左右的時間完成縫合, 相信專業醫療人員所需操作時間更短。而推結的輔助器械即使與打 結器從同一孔洞進出也能順利推結,符合單一切口微創腹腔鏡手術 的需求。推結的步驟經過幾次的練習,也能順利操作。但目前此打 結器尚無法重複多次打結的動作,是有待改善的部分。 5.3 未來工作 未來可望將打結器完整的實體模型做出,並以真正的醫療用縫 線及縫針進行操作測試,觀察是否符合預期。甚至進一步進行動物或人體測試,並請專業外科手術醫師操刀,評估打結器的使用效 果。同時可構想多次打結的機構或設計,以期達成更完整的縫合效 果。甚至能將打結步驟的流程透過器械的設計,使其自動化,讓操 作者使用起來更輕鬆,相對打結就更快速容易。
參考文獻
[1]Manickam Ramalingam,Vipul R.Patel,Operative Atlas of Laparoscopic Reconstructive Urology,Springer London,London,2009
[2]Dulucq,Jean-Louis,Tips and Techniques in Laparoscopic Surgery,Springer, Berlin Heidelberg,Berlin,2005
[3]Bruce V. MacFadyen Jr.MD et al.,“Laparoscopic Surgery of the Abdomen”, Springer New York,New York,2004
[4]Conor P. Delaney MD et al.,“Operative Techniques in Laparoscopic Colorectal Surgery”, Lippincott Williams & Wilkins,Philadelphia,2007
[5]Harrith M. Hasson,Carlos A. Rotman,“Suture Tying Forceps With A Plurality Of Suture Holders And method Of Tying A Suture”,United States Patent, pat5261917,USPTO,Nov.16,1993
[6]Jeffrey W. Milsom,Bartholomaus Bohm,Kiyokazu Nakajima,Laparoscopic Colorectal Surgery,Springer New York,New York,2006
[7]Shizuka Kaseda,Minamisenju,Arakawa-ku,“Forceps”, United States Patent, pat5792117,USPTO,Aug.11,1998
[8]Fung-Chao Tu,“Multifunctional Forceps Set and Loop Ligature Co-used Therewith”, United States Patent,pat7470276,USPTO,Dec.30,2008 [9]LAGIS,http://www.lagis.com.tw/
![圖 3 傳統腹腔鏡體內打結器 [1]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8509857.185776/15.892.277.748.508.844/圖3傳統腹腔鏡體內打結器1.webp)
![圖 4 縫線置入體內示意圖 [1] 接著從另一孔洞置入輔助夾具,完成縫線打結的準備動作。再來以 主夾具夾住縫線的一端,並將縫線纏繞在輔助夾具上來形成一 “C” 型圈套,如圖 5。C 型圈套完成後,以輔助夾具前端(Tip)夾 嘴夾住縫線的另一端並往後拉,如圖 6,結的形狀就完成了。最後 主夾具及輔助夾具分別將縫線的兩端拉緊,如圖 7,固定住縫 圖 5 以主夾具纏繞 C 型圈套 [1] 圖 6 以輔助夾具夾取縫線另一端 [1]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8509857.185776/16.892.346.591.113.358/套完成後以輔助夾具前Tip嘴夾住縫另一端並往後拉如圖形狀以主以輔.webp)
![圖 7 縫線兩端拉緊 [1] 合的部位,至此第一個結完成。這一連串打結的動作看似簡單,其 實不然。因人體腹腔內空間狹小,要操作主夾具與輔助夾具做縫線 纏繞與拉緊的動作時,兩根夾具很容易互相碰撞,操作不易。而且 縫線的材質為尼龍線,纏繞的過程縫線時常從輔助夾具上滑落,並 不容易固定於輔助夾具上,更增加了操作的困難。而視縫線尺寸的 不同,醫師需要重複打結的次數也不相同,多次打結的動作也是拖 延整體手術時間的主因之ㄧ。Dulucq [2] 與 Bruce [3] 及 Conor [4] 等人 也提到體內打結須反](https://thumb-ap.123doks.com/thumbv2/9libinfo/8509857.185776/17.892.331.601.102.342/第一個結完時常從輔助夾具上滑落不容易固定於輔助夾具上更術時間.webp)
![圖 8。此改良式縫線打結器品牌名稱為 MAHE [5] ,而器械名稱為 圖 8 改良式縫線打結器 Easynot [5] Easyknot [5] 。該打結器具有兩個縫線夾頭,能使主夾具在纏繞縫線 於 Easyknot [5] 的過程中,固定縫線,使纏繞好的縫線不易滑落,藉 此降低體內縫線打結的難度。圖 9 為縫線纏繞於 Easyknot [5] 的模 圖 9 Easyknot 將纏繞後的縫線固定住 [5] 樣,可以清楚看見纏繞後的縫線會被離前端較遠的縫線夾頭固定, 因而不易滑落造成打結失敗。此改良式體內](https://thumb-ap.123doks.com/thumbv2/9libinfo/8509857.185776/18.892.202.821.167.344/低體內縫線打結的難度為縫線纏繞於的模Easyknot將纏繞後縫線樣可體內.webp)
![圖 14 改良式縫線打結器推結圖 [7] 成打結的動作。此改良式體外縫線打結器透過整合推結與拉緊活結 的功能,確實減少了手術時間;但因為縫線始終是拉出體外以雙手 來纏繞成型的,所以縫線需大量消耗這點還是沒有改善,亦即手術 成本依然很高。另外 Fung [8] 也有發表類似功能的整合型縫線打結 器,但也存在著縫線消耗量大的問題。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8509857.185776/21.892.151.796.120.725/來纏繞成型的所以縫線需大量消耗這點還是沒有改善亦即手依然問題.webp)