IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 2, FEBRUARY 2005 1067
H Repetitive Control for Pickup Head Flying
Height in Near-Field Optical Disk Drives
J. W. Chen and T. S. Liu
Abstract—The slider of a flying pickup head in a near-field op-tical disk drive has to fly at a stable height above the disk surface. An air bearing force between the slider and optical disk is affected by disk rotation speed and deformation, which represent low-fre-quency periodic disturbance to the slider. The repetitive control is adopted in this study to eliminate the periodic disturbance.H control inherited with robust properties can deal with model un-certainty and disturbances. Therefore, to solve model unun-certainty and disturbance, this study designs a repetitive controller cascaded by anH controller. The proposed controller is validated by ex-perimental results.
Index Terms—Air bearing,H control, near-field optical disk drive, pickup head, repetitive control.
I. INTRODUCTION
I
N order to overcome the diffraction limit of conventional op-tical disk drives and substantially increase data storage ca-pacity and density, near-field optical disk drives remain to be re-alized. Enhancing control performance to stabilize the fly height of the pickup head in near-field optical disk drives is demanded. To achieve accurate and stable flying height, this study develops an repetitive controller, which unifies characteristics of control into repetitive control. A multiplicative uncertainty design method is employed in feedback control, which fulfills disturbance and uncertainty rejection requirements and guaran-tees closed-loop stability. However, the desired position com-mand and tracking response generally are periodic signals due to disk vibration. Therefore, a time-delay positive feedback con-troller is incorporated, thereby repetitive control offers a compe-tent approach to position tracking, since it can deal with a large number of harmonics simultaneously, even with several distur-bances at different frequencies.II. CONTROL
In this study, a pickup head model is identified by using a laser Doppler interferometer. Its transfer function is obtained as
(1)
Manuscript received August 28, 2004. This work was supported by the National Science Council, Taiwan, R.O.C., under Grant NSC93-2752-E009-009-PAE.
The authors are with the Department of Mechanical Engineering, National Chiao Tung University, Hsinchu 30010, Taiwan, R.O.C. (e-mail: [email protected]; [email protected]).
Digital Object Identifier 10.1109/TMAG.2004.842018
In order to deal with system uncertainty, this study designs an controller. First, consider a reference model of with variance 10%. Since the reference model for has six vari-ances due to two zeros and four poles, both upper and lower bounds lead to transfer functions. Based on (1), a model of uncertainty can be written as
(2) where
and , and . Define the
un-structured uncertainty boundary error as
. A Bode diagram for is shown in Fig. 1. Ac-cording to the small gain theorem, all perturbations must be under the upper bound [1]. Therefore, dealing with the upper-bound contour, which is constructed based on Fig. 1, this study defines a weighting function
(3) and a multiplicative uncertainty
. It requires that [1].
An optimization problem is to find a stabilizing controller such that
where and denote
and respectively. The performance of
the weighting function is prescribed as a low-pass filter that weights heavily at low frequency to achieve good tracking performance. Moreover, the weighting function is used to represent the frequency content of the sensor noise. Hence,
is prescribed as
(4) The function is prescribed as
(5) The controller can be derived using (1) and (3)–(5) to be-come
(6)
1068 IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 2, FEBRUARY 2005
Fig. 1. Bode diagram of unstructured uncertainty boundary error1(j!).
where
For robust tracking, instead of utilizing precise models with con-troller, this study has developed a robust controller. The system model parameters are allowed to be rough.
III. REPETITIVECONTROL
For the slider of a flying pickup head in a near-field optical disk drive, tracking performance is influenced by disturbances with periodic components appearing at a known fundamental frequency corresponding to the disk speed and its higher har-monics. Repetitive controllers [2] can improve tracking perfor-mance by rejecting periodic disturbances. However, in selecting the bandwidth of a low-pass filter in the repetitive controller, which determines steady-state error and system stability, most existing approaches require trials and error. Further, in case the plant has uncertainties, to guarantee system stability the band-width is likely to be limited. As a result, the steady-state error does not decrease within a specified bound anymore. Any pe-riodic signal with period can be generated by a time-delay system with an appropriate initial function [3]. The system has infinitely many poles on the imaginary axis. The closed-loop
systems model is . Consider a
repet-itive control system with the model
depicted in Fig. 2 where in the feedforward
Fig. 2. Repetitive control system.
Fig. 3. Block diagram ofH repetitive control.
path is a proper stable rational function. , a transfer function for the compensated plant, is a proper stable rational function. and denote Laplace transforms of responses to initial conditions of and , respectively. It follows from Fig. 2 that the error is written as
(7)
where . The
conver-gence condition or stability condition for the repetitive control system can be examined by considering the BIBO stability for the equivalent system described by (7) with an aid of the small
gain theorem. An exogenous input is an
function under the assumption of the asymptotic stability of where denotes an inverse Laplace trans-form. According to the above assumption, concerning Fig. 2 there are two sufficient conditions for stability of repetitive con-trol systems:
proper and stable (8) (9) This work designs a repetitive controller to cascade an controller as depicted in Fig. 3, where the controller em-ploys and plant model (1). According to (8) and (9), this
study designs .
Fig. 4 compares open-loop Bode diagrams of the plant with and without the repetitive controller, which compen-sates for 90 Hz and its multiples.
IV. EXPERIMENT
Bode diagrams for the pickup head, pickup head with an controller, and pickup head with an repetitive control are shown in Fig. 4. The dotted line denotes the Bode diagram of the pickup head and the dash-dotted line the pickup head with an controller, in which the controller eliminates two resonant peaks in the dotted line and increases insensitivity. Low sensitivity tolerates model uncertainty of the pickup head.
CHEN AND LIU: REPETITIVE CONTROL FOR PICKUP HEAD FLYING HEIGHT 1069
Fig. 4. Bode diagrams of pickup head with and without controller.
Fig. 5. Bode diagram of output error with and without controller.
In order to reduce disk flutter disturbance, the controller cascades a repetitive controller based on disturbances frequency of disk vibration and results in the solid line in Fig. 4. It exhibits many peaks that are multiples of 90 Hz corresponding to the disturbance frequency. Repetitive control enhances the system sensitivity at specific frequencies.
The Bode diagram for is shown solid line in Fig. 5. The solid line in Fig. 5, disturbances of 90 Hz and its multiples are not sensitivity. That is, the specific disturbances frequency can be eliminated. The dot line is not compensated with any controller.
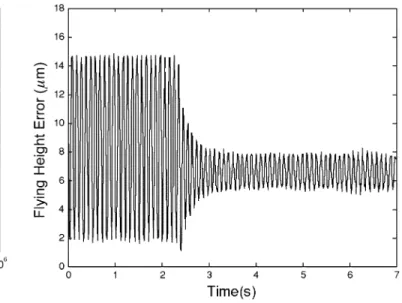
Fig. 6. Experimental results.
According to measurement, the disk flutter signal can be de-composed into 11 modes of the form
Using the proposed repetitive control method, experimental results of disturbance input with are depicted in Fig. 6. Be-fore 2.4 s the main frequency of reference input is a sinusoid at 90 Hz mixed with its multiples. Hence, the period of the repetitive controller is prescribed as s. As a consequence, the present controller reduces the flying height error to 12% of the original one.
V. CONCLUSION
The proposed control method incorporates repetitive control to reject periodic disturbances. An design method has been used to ensure that the pickup head performs effectively within stability region. As a result, flying height error arising from disk flutter is significantly reduced in experiments.
REFERENCES
[1] K. Zhou and J. C. Doyle, Essentials of Robust Control. Upper Saddle River, NJ: Prentice-Hall, 1998.
[2] S. Hera and Y. Yamamoto, “Stability of repetitive control systems,” in
Proc. IEEE 24th Conf. Decision and Control, 1985, pp. 326–327.
[3] S. Hera, Y. Yamamoto, T. Omata, and M. Nakano, “Repetitive control system: A new type servo system for periodic exogenous signals,” IEEE