國立臺中教育大學資訊工程學系碩士論文
以軟體定義網路 QoS 機制實現網路
觸覺同步之研究
Enhance the Distributed Haptic
Synchronization Using the Software
Defined Network QoS Mechanism
指導教授:李宗翰 教授
研究生:王朝仕 撰
摘要
在下一代網際網路多媒體的持續發展 ,多媒體服務不僅需要 Quality of Service (QoS)的支援外,如何應用網際網路來傳輸觸覺感知更是一個重要的議題。 在傳統網路是基於 Best-effort 的傳送方式,如何避免網路中產生過高的 Delay、 Jitter 和 Packet loss 是一項嚴格的挑戰,然而這些參數都會對於分散式 Haptic device 產生各別的影響,造成使用者在進行 Haptic device 遠端互動體驗下的感知 失真。因此本研究首先證明了 Delay 會造成設備動作及影像同步的延遲、Jitter 在 設備上產生了抖動和不穩定因素、Packet loss 會讓 Haptic device 力道減少以及提 升中 斷連 線的 可能 性。 另外 ,本 研究 也結 合軟 體定 義網 路(Software defined networks )之 QoS 機制來維持分散式 Haptic 設備間同步傳輸的穩定性,藉此以提 供下一代網際網路高品質的觸覺傳輸服務。
關鍵詞: QoS、Delay、Jitter、Packet loss、Software defined networks
Abstract
In the next generation of Internet multimedia sustained development,and multimedia service is not only required Quality of Service (QoS) support, but also how to use Internet to transmit Haptic sensations is an important issue. How to avoid excessively high Delay, Jitter and Packet loss is a challenge in the traditional best-effort network. However, these QoS parameters have influence each other for distributed Haptic, causing the perceptual distortion for user interactive experience. Therefore, this study first prove that Delay will cause the Haptic device movement and image synchronization Delay, Jitter generated the Jitter and instability, Packet loss will reduce the strength of Haptic device as well as enhance the possibility of interrupted connection. In addition, this study combined with software-defined networking (Software defined networks) of QoS mechanisms to maintain the stability of Haptic device synchronization between distributed transmission, thereby to provide the next generation of Internet high-quality Haptic sensations transmission services.
誌謝
感謝指導教授李宗翰教授,感謝您無論在研究上以及生活上皆給予我很大的 發展空間以及關懷,且在研究上教導學生以嚴謹態度來面對實作所遇到瓶頸和挑 戰。感謝老師讓我在研究所期間給予研究上最大的資源,讓我在本次研究上沒有 後顧之憂的全力衝刺,善盡各種資源得以順利完成論文,同時也感謝張林煌教授 在這兩年的的指導與協助,適時的給予解決問題的方向。感謝碩士論文口詴委員 廖俊鑑教授、朱鴻棋教授,在口詴時提出建議與見解使本論文內容更加完善。 研究生涯上更要感謝實驗室的明駿,智皓學長在研究上的相互討論及協助; 也感謝智謀、旻映、昱豪、為中學弟妹幫忙分擔實驗室事務,在實驗想法給與我 許多幫助;涵菩、于珊、育堯學弟在研究上給予我研究創新的想法及鼓勵,謝謝 你們對我的支持才得以完成本次研究。 最後要感謝我的家人,父親在這段日子不僅扮演著嚴父,是我求學過程中向 前邁進的力量,更是慈母讓我有最好的避風港,促使自己在徬徨困惑時都能坦然 面對,以不逃避的態度使得自己有所成長。在此僅將此篇論文獻給最感謝的你 們。 王朝仕謹誌 中華民國 104 年 7 月目錄
摘要 ... i Abstract ... ii 誌謝 ... iii 目錄 ... iv 表目錄 ... vii 圖目錄 ... ix 第一章 ... 1 緒論 ... 1 1.1 研究背景... 1 1.2 研究動機與目的 ... 3 1.3 論文架構... 4 第二章 ... 5 文獻探討 ... 5 2.1 PHANTOM Omni 力回饋裝置簡介 ... 52.3.1 軟體定義網路技術於網路之簡介 ... 14
2.3.2 OpenFlow 之 QoS 文獻研究 ... 23
第三章 ... 26
Haptic device 筆尖移動位置與網路品質 ... 26
3.1 Haptic device 之 End-to-End 系統架構 ... 27
3.2 網路 Delay 對 Haptic device 影響分析 ... 30
3.3 網路 Packet loss 對 Haptic device 影響分析 ... 35
3.4 網路 Jitter 對 Haptic device 影響分析 ... 42
3.5 圖形相似度與網路品質測詴結果 ... 47
3.6 網路損耗對於圖形相似度之結論 ... 73
第四章 ... 74
無線軟體定義網路使用 Jperf 模擬 Haptic device 封包傳送分析 ... 74
4.1 軟體定義網路網路 End-to-End 有線及無線測詴平台架構 ... 75
4.2 Jperf 模擬 Haptic device 封包傳送於無線網路之品質分析 ... 79
4.3 Jperf 模擬 Haptic device 封包在無線軟體定義網路之 QoS 機制結果 ... 85
4.4 Jperf 模擬 Haptic device 封包結論 ... 89
第五章 ... 90
5.1 Haptic device 結合軟體定義網路(SDN)有線及無線網路測詴平台架構 .. 90
5.2 Haptic device 在 OpenFlow switch 有線網路沒有加入 QoS 實測結果 ... 93
5.3 Haptic device 在 OpenFlow switch 無線網路沒有加入 QoS 實測結果 ... 97
5.4 Haptic device 在軟體定義網路 QoS 機制下測詴有線及無線網路架構之測 詴結果 ... 102
5.5 Haptic device 結合軟體定義網路之結論 ... 111
第六章 ... 112
結論與未來研究方向 ... 112
表目錄
表 2-1、五級質量評分表[6] ... 10
表 2-2、DHVEHAPTIC TRAFFIC VERSUS OTHER SERVICE TYPES NETWORK PARAMETERS SUMMARY [3] ... 12
表 3-1、實驗電腦規格表... 28
表 3-2、RANDOM PACKET LOSS判斷 MOS 值 ... 37
表 3-3、PACKET LOSS參數下的圓型相似度 ... 50 表 3-4、PACKET LOSS參數下的正方形相似度 ... 51 表 3-5、PACKET LOSS參數下的鋸齒相似度 ... 52 表 3-6、DELAY 0MS JITTER 0MS ~10MS圓形相似度比較表 ... 53 表 3-7、DELAY 50MS JITTER 0MS ~10MS圓形相似度比較表 ... 54 表 3-8、DELAY 100MS JITTER 0MS~10MS圓形相似度比較表 ... 54 表 3-9、DELAY 150MS JITTER 0MS~10MS圓形相似度比較表 ... 55 表 3-10、DELAY 200MS JITTER 0MS~10MS圓形相似度比較表 ... 56 表 3-11、DELAY 0MS JITTER 0MS~10MS正方形相似度比較表 ... 63 表 3-12、DELAY 50MS JITTER 0MS~10MS正方形相似度比較表 ... 63 表 3-13、DELAY 100MS JITTER 0MS~10MS正方形相似度比較表 ... 64
表 3-14、DELAY 150MS JITTER 0MS~10MS正方形相似度比較表 ... 65 表 3-15、DELAY 200MS JITTER 0MS~10MS正方形相似度比較表 ... 65 表 3-16、DELAY 0MS JITTER 0MS~10MS鋸齒相似度比較表 ... 66 表 3-17、DELAY 50MS JITTER 0MS~10MS鋸齒相似度比較表 ... 67 表 3-18、DELAY 100MS JITTER 0MS~10MS鋸齒相似度比較表 ... 67 表 3-19、DELAY 150MS JITTER 0MS~10MS鋸齒相似度比較表 ... 68 表 3-20、DELAY 200MS JITTER 0MS~10MS鋸齒相似度比較表 ... 69 表 4-1、BACKGROUND TRAFFIC電腦規格表 ... 78
表 4-2、HAPTIC DEVICE PC MASTER THROUGHPUT(KBIT/S)... 79
表 4-3、HAPTIC DEVICE PC SLAVE THROUGHPUT(KBIT/S) ... 80
表 5-1、有線網路 QOS 頻寬保證圓形相似度比較表 ... 103 表 5-2、無線網路 QOS 頻寬保證圓形相似度比較表 ... 104 表 5-3、有線網路 QOS 頻寬保證正方形相似度比較表 ... 105 表 5-4、無線網路 QOS 頻寬保證正方形相似度比較表 ... 105 表 5-5、有線網路 QOS 頻寬保證鋸齒相似度比較表 ... 106 表 5-6、無線網路 QOS 頻寬保證鋸齒相似度比較表 ... 107
圖目錄
圖 1、手套式觸覺模組 ... 6
圖 2、PHANTOMOMNI設備 ... 6
圖 3、PHANTOMOMNI可動關節 ... 7
圖 4、遠端控制系統配置[6] ... 10
圖 5、DIFFSERV TREATMENT FOR HAPTIC AND BACKGROUND TRAFFIC PACKETS[3] .. 12
圖 6、OPENFLOW SWITCH概念圖[21] ... 16
圖 7、OPENFLOW SWITCH 架構圖 ... 17
圖 8、OPEN VSWITCH USER SPACE服務程序 ... 21
圖 9、OPEN VSWITCH KERNEL MODULE ... 22
圖 10、SENDING THE MASTER TIP POSITION DATA TO SLAVE ... 27
圖 11、HAPTIC DEVICE啟動同步位置畫面 ... 29
圖 12、MASTER和 SLAVE端觸覺裝置同步執行動作... 29
圖 13、HAPTIC DEVICE繪圓形時 DELAY時間逐漸增加,MASTER和 SLAVE分別位 置 ... 32
圖 14、HAPTIC DEVICE繪正方形時 DELAY時間逐漸增加,MASTER和 SLAVE分別 位置 ... 33
圖 15、HAPTIC DEVICE繪鋸齒時 DELAY時間逐漸增加,MASTER和 SLAVE分別位 置 ... 34
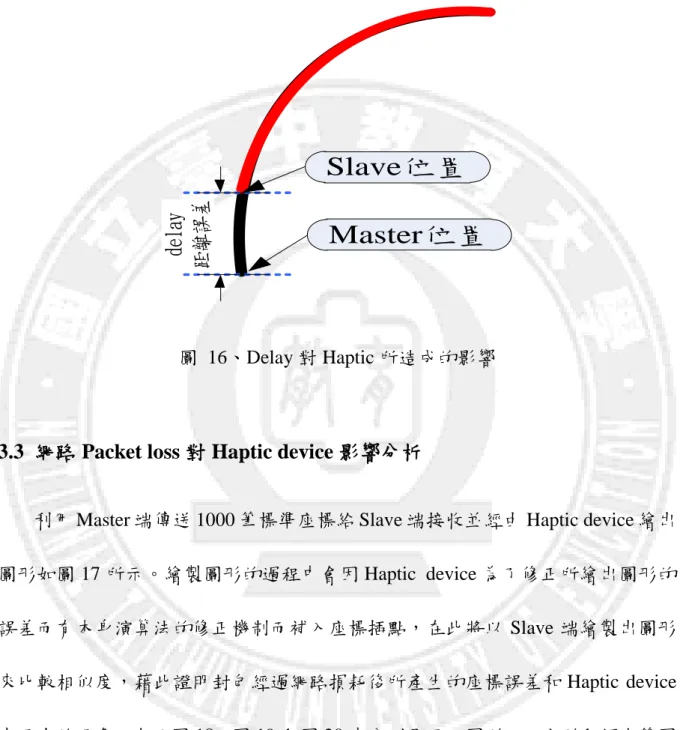
圖 16、DELAY對 HAPTIC所造成的影響 ... 35
圖 17、MASTWER端傳送座標至 SLAVE端接收並繪圖 ... 36
圖 18、HAPTIC DEVICE繪製圓形時各 PACKET LOSS參數對圖形之影響 ... 39
圖 20、HAPTIC DEVICE繪鋸齒時各 PACKET LOSS參數對圖形之影響 ... 41
圖 21、HAPTIC DEVICE繪製圓形時各 JITTER參數對圖形之影響 ... 44
圖 22、HAPTIC DEVICE繪製正方形時各 JITTER參數對圖形之影響 ... 45
圖 23、HAPTIC DEVICE繪製鋸齒時各 JITTER參數對圖形之影響 ... 46
圖 24、圓形相似度範圍判斷 ... 48 圖 25、圓形相似度範圍判斷 ... 48 圖 26、鋸齒相似度範圍判斷 ... 49 圖 27、圓形相似度直條圖 ... 50 圖 28、正方形相似度直條圖 ... 51 圖 29、鋸齒相似度直條圖 ... 52 圖 30、當 DELAY 0MS時各 JITTER參數受影響之相似度曲線 ... 57 圖 31、當 DELAY 50MS時各 JITTER參數受影響之相似度曲線 ... 57 圖 32、當 DELAY 100MS時各 JITTER參數受影響之相似度曲線 ... 58 圖 33、當 DELAY 150MS時各 JITTER參數受影響之相似度曲線 ... 58 圖 34、當 DELAY 200MS時各 JITTER參數受影響之相似度曲線 ... 59 圖 35、各 JITTER在不同的 DELAY參數下平均相似度曲線 ... 59 圖 36、當 DELAY 0MS時各 JITTER參數受影響之相似度曲線 ... 60 圖 37、當 DELAY 50MS時各 JITTER參數受影響之相似度曲線 ... 60 圖 38、當 DELAY 100MS時各 JITTER參數受影響之相似度曲線 ... 61 圖 39、當 DELAY 150MS時各 JITTER參數受影響之相似度曲線 ... 61 圖 40、當 DELAY 200MS時各 JITTER參數受影響之相似度曲線 ... 62
圖 44、當 DELAY 100MS時各 JITTER參數受影響之相似度曲線 ... 70
圖 45、當 DELAY 150 各 JITTER參數受影響之相似度曲線 ... 71
圖 46、當 DELAY 200MS時各 JITTER參數受影響之相似度曲線 ... 71
圖 47、各 JITTER在不同的 DELAY參數下平均相似度曲線 ... 72
圖 48、OPEN VSWITCH有線測詴架構 ... 75
圖 49、OPEN VSWITCH QOS 測詴指令 ... 76
圖 50、OPEN VSWITCH FLOW指令 ... 76
圖 51、QOS 頻寬設置最大為 15MBITS/SEC最小為 8MMBITS/SEC ... 76
圖 52、QOS 頻寬設置最大為 10MBITS/SEC最小為 2MBITS/SEC ... 76
圖 53、OPEN VSWITCH無線測詴平台架構 ... 77
圖 54、HAPTIC DEVICE MASTER平均THROUGHPUT ... 80
圖 55、HAPTIC DEVICE SLAVE平均THROUGHPUT ... 81
圖 56、AVERAGE BACKGROUND TRAFFIC THROUHHPUT ... 81
圖 57、HAPTIC DEVICE MASTER平均 JITTER ... 82
圖 58、HAPTIC DEVICE SLAVE平均 JITTER ... 83
圖 59、數據抖動示意圖 ... 84
圖 60、HAPTIC DEVICE MASTER THROUGHPUT ... 86
圖 61、HAPTIC DEVICE SLAVE THROUGHPUT ... 86
圖 62、HAPTIC DEVICE JITTER MASTER... 87
圖 63、HAPTIC DEVICE JITTER SLAVE ... 87
圖 64、BACKGROUND TRAFFIC THROUGHPUT ... 88
圖 65、HAPTIC DEVICE 結合有線軟體定義網路之架構 ... 91
圖 68、有線網路沒有加入 QOS 機制 HAPTIC DEVICE畫正方形實測... 95 圖 69、有線網路沒有加入 QOS 機制 HAPTIC DEVICE畫鋸齒實測 ... 96 圖 70、無線網路沒有加入 QOS 機制 HAPTIC DEVICE畫圓形實測 ... 98 圖 71、無線網路沒有加入 QOS 機制 HAPTIC DEVICE畫正方形實測 ... 100 圖 72、無線網路沒有加入 QOS 機制 HAPTIC DEVICE畫鋸齒實測 ... 101 圖 73、TP-LINK-1043NDAP ... 102 圖 74、QOS 頻寬保證指令 ... 103 圖 75、有線網路頻寬保證 HAPTIC DEVICE傳輸的圓形相似度 ... 108 圖 76、無線網路頻寬保證 HAPTIC DEVICE傳輸的圓形相似度 ... 108 圖 77、有線網路頻寬保證 HAPTIC DEVICE傳輸的正方形相似度 ... 109 圖 78、無線網路頻寬保證 HAPTIC DEVICE傳輸的正方形相似度 ... 109 圖 79、有線網路頻寬保證 HAPTIC DEVICE傳輸的鋸齒相似度 ... 110 圖 80、無線網路頻寬保證 HAPTIC DEVICE傳輸的鋸齒相似度 ... 110
第一章
緒論
本論文提出網際網路傳遞觸覺回饋資訊的研究背景,並且透過有線網路結合 觸覺回饋裝置運用軟體定義網路設定 QoS 來保證傳輸頻寬之傳輸設計。在本章節 中,將針對本論文所提出之系統相關研究背景、動機以及研究目的進行說明,最 後論述本論文架構。1.1 研究背景
近來,利用網路發展人類感知互動相關研究與日俱增。例如:醫學、軍事和製 造等方面都可發現其應用;醫生使用遠端控制替遠在偏鄉的病人醫療,居家看護 協助老人或傷殘者,探測船太空探勘等,像這些應用可通稱為遠端操作,而利用 網路的互動交流,如何將遠端操作之資訊呈現到操作者端,其技術稱之為遠端呈 現,由於網路技術蓬勃發展下遠端操作已成為相當重要的一部份,遠端呈現能夠 將遠方受控端(如機器人)的即時狀態傳送回操作者,使操作者能了解被控端之最 新資訊以便回應。而最常使用的技術就是視覺回饋,經由被控端所裝載之攝影機 直接攝取影像或透過虛擬實境 (Virtual Reality: VR) 模擬來達成視覺的回饋。然 而,利用觸覺回饋 (Haptic feedback)作為遠端操作資訊回饋,近來已被許多研究 團隊所重視。如遠端手術 (Telesurgery) 僅提供視覺的回饋是遠遠不足的,因此經由觸覺設備 (Haptic device) 的觸覺回饋,精確的將手術刀的物理資訊即時反映回 醫師所操作的控制機件上,如此才能達到更為真實與準確呈現遠端手術的基本要 求。除此之外,在網際網路的發展趨勢上,具有觸覺回饋之應用也越來越多,僅 傳送人類的視覺和聽覺等相關資訊已不足以應付未來使用虛擬實境在網際網路 上的應用,利用人與人間的觸覺反饋的變化所帶來的資訊交流與思想傳遞,將會 比僅僅利用視覺或聽覺而言,更加的使人印象深刻。因此如何加入人類的其他感 知能力,如觸覺反饋等資訊已成為未來研究的新興領域。近來觸覺反饋技術已被 應用於虛擬環境之中,使用者可以與虛擬物體通過觸覺感知來達到交互運作。因 此經由觸覺和力回饋所呈現的感知,能精準的將手術刀上之力回饋資訊即時反映 在所操控的機件上,達到更為真實與準確呈現遠端操控的基本需求。
目前網路環境是以 Best Effort 的服務方式,這樣的傳輸方式對於 voice、video 和 real-time traffic 等資料傳輸是較於不利。因此各界認為在網路服務應該要有 (Quality of Service: QoS)來支援即時性的資料傳輸。對於 Haptic device 要成功的互 動,需要有嚴格的 QoS 來支援有效的傳輸流量,若是有網路障礙影響,如 Jitter、 Delay 和 Packet loss,這些網路障礙會嚴重影響體驗觸覺互動的使用者。在 Haptic 連線互動頇即時傳送力回饋資料給體驗者,由於 Jitter、Delay 和 pack loss 影響而 造成資料的保有原始定位封包內容遺失的情形,可能會突然導致力回饋裝置的錯
1.2 研究動機與目的
本論文的主要目的是以有線網路及無線網路之品質服務保證機制為基礎,運 用 觸 覺 虛 擬 化 環 境 的 技 術 , 開 發 出 工 作 於 操 作 者 所 操 控 之 觸 覺 回 饋 裝 置 (PHANTOM Omni)[1]與具感知回饋之訊息回饋系統,使用者可以由 Haptic 以有 線網路技術回饋多種感知資訊,如力回饋、震動、觸覺等給操作者,延伸人類感 知的範圍。
然而現今觸覺回饋裝置(PHANTOM Omni)雖廣泛使用在許多領域中,如文獻 [2],主要在研究其設備在資料傳輸時網路損耗的影響,PHANTOM Omni 會對於 網路損耗有一定的容忍值和人為的網路補償,來減少損耗對於體驗者的影響。在 此探討網路服務質量 QoS 其中的三個參數,分別為 Jitter、Delay 和 Packet loss。 Jitter 可讓體驗者感覺到虛擬物體的質量變化,而且容易造成系統不穩定。Delay 會造成虛擬環境無法同步複製,以及模擬動作的不一致性。Packet loss 減少體驗 者所能感受到真實力回饋所呈現的力道,也間接改變模擬模型外觀重量,當丟失 的封包數量增加時可能會引起突然的力回饋,也是造成系統不穩定的原因。
以目前網際網路Best Effort服務不足以提供足夠的資源來降低分散式虛擬實 境環境(Distribute Haptic Virtual Environment: DHVEs)的Jitter、Delay和Packet loss 的產生是目前所面臨的問題。因此本論文將於有線網路下結合軟體定義網路(SDN) 之QoS機制,以確保觸覺感知回饋事件能即時且無失真的情形下回饋給操作者。
1.3 論文架構
本論文之架構主要如下,第二章先進行相關文獻探討,主要針對本論文所使 用之觸覺回饋裝置(PHANTOM Omni)介紹,並對過去多位學者所做相關研究如觸 覺回饋裝置於網路之損耗分析;第三章為本論文提出 Haptic device 座標位置與網 路品質之分析,對其系統架構以及實驗方法做論述。第四章則對本研究系統進行 Haptic device 封包傳輸模擬分析,首先先透過 Jperf 模擬 Haptic device 封包,並在 有 Background traffic 的 FTP download 的環境下進行測詴並分析其結果。第五章 中將實際以 Haptic 結合軟體定義網路(SDN)之 QoS 機制運行於有線及無線網路之 環境結果分析。
第二章
文獻探討
由於本論文設計力回饋裝置測詴於有線網路之環境,將對力回饋裝置網路品 質測詴方法進行分析,並利用軟體定義網路(SDN)進行服務品質的提升,因此在 相關文獻的探討將包含上述之議題,分別針對力回饋測詴方式以及軟體定義網路 (SDN)等相關領域研究進行討論及探討。2.1 PHANTOM Omni 力回饋裝置簡介
觸覺設備以許多方式呈現,可分為兩種類型,一種為觸覺回饋,另一種為力 回饋。觸覺是人體皮膚表面接觸、滑動、按壓等刺激總稱,通常觸覺回饋設備是 以機械指套方式戴在手上,藉由指尖觸摸物體來傳送觸覺資訊[4],如圖 1。而力 回饋設備較觸覺設備不同的地方除了設備本身外觀構造不同外,可模仿人類手部 關節及肌腱[2],利用人體手臂移動來產生力道資訊,讓在遠端體驗者感受到力回 饋,如圖 2。
圖 1、手套式觸覺模組 圖 2、PHANTOM Omni 設備
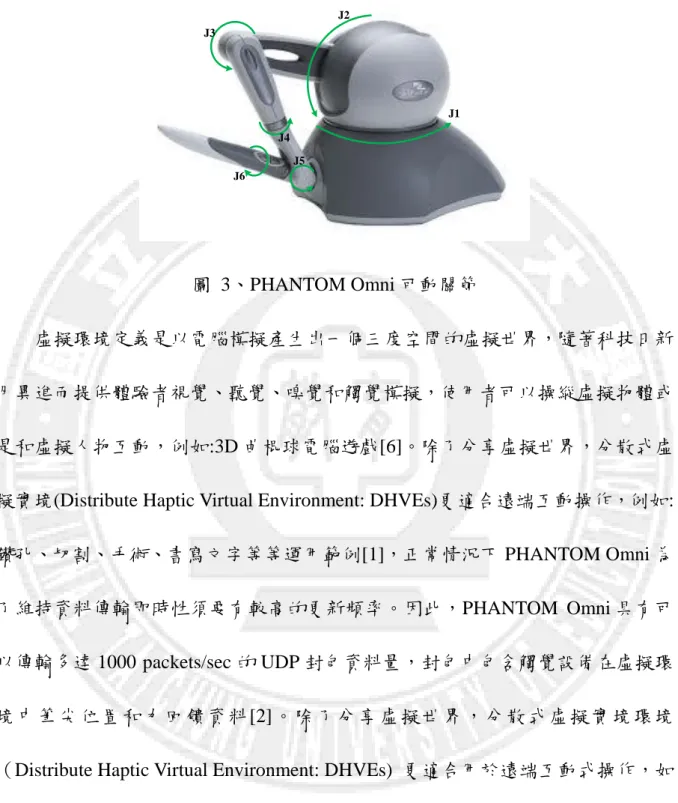
本研究所使用之力回饋設備 SensAble 如圖 2 所示,為單點觸覺回饋裝置 PHANTOM Omni [1]在本論文中簡稱為 Haptic device。力回饋設備根據設備的自 由度和接觸點的數目分成好幾種不同類型,通常是 1 到 6 個自由度(Degrees of Freedom: DOF)[5]。隨著模擬系統上所顯示不同模型進行模擬和觸摸,PHANTOM Omni 會提供 3 到 6 自由度之間的力回饋[1],圖 3 中所示自由度從 J1 到 J6 都為 可動關節所擺動幅度也相對比 1 到 5 個自由度之設備大,但還是有擺動極限。 PHANTOM Omni 力回饋裝置的應用早期主要是用在 3D 繪圖設計、電腦特效視 覺設計、工業製圖或是遊戲互動等應用。
圖 3、PHANTOM Omni 可動關節
虛擬環境定義是以電腦模擬產生出一個三度空間的虛擬世界,隨著科技日新 月異進而提供體驗者視覺、聽覺、嗅覺和觸覺模擬,使用者可以操縱虛擬物體或 是和虛擬人物互動,例如:3D 曲棍球電腦遊戲[6]。除了分享虛擬世界,分散式虛 擬實境(Distribute Haptic Virtual Environment: DHVEs)更適合遠端互動操作,例如: 鑽孔、切割、手術、書寫文字等等運用範例[1],正常情況下 PHANTOM Omni 為 了維持資料傳輸即時性頇要有較高的更新頻率。因此,PHANTOM Omni 具有可 以傳輸多達 1000 packets/sec 的 UDP 封包資料量,封包中包含觸覺設備在虛擬環 境中筆尖位置和力回饋資料[2]。除了分享虛擬世界,分散式虛擬實境環境 (Distribute Haptic Virtual Environment: DHVEs) 更適合用於遠端互動式操作,如 遠程手術和遠距操作是兩個 DHVEs 的運用範例。現今應用 DHVES 的服務越來 越多,而且遍及於許多不同領域中,其中包括:遠端照護,遠程教育,工業訓練、 J1 J4 J3 J2 J5 J6
化學實驗等。如何針對 DHVEs 的應用,讓網路傳輸效率更能符合 DHVEs 的需要 是非常重要的研究議題。在近來的研究中,初步已經成功將 DHVEs 應用於網際 網路之上。除此之外,在網際網路的發展趨勢上,具有力回饋之應用也越來越多, 僅傳送人類的視覺和聽覺等相關資訊已不足以應付未來使用虛擬實境在網際網 路上的應用,因此如何加入人類的其他感知能力,如觸覺反饋等資訊已成為未來 研究的新興領域。在[7]相關研究中已經初步證實,利用人與人間的觸覺反饋的變 化所帶來的資訊交流與思想傳遞,將會比僅僅利用視覺或聽覺而言,更加的使人 印象深刻。觸覺感知來自於每個人的自我意識,所以如何將觸覺感知訊息量化並 應用於網路中是一個極大挑戰的議題。
2.2 觸覺感知回饋裝置網路品質之測定方式
現今觸覺回饋裝置(Haptic device)在網路上測量方式及實際網路應用之文獻 相當有限,尤其觸覺回饋裝置所傳送之資訊並非一般網路資料串流如:影像、聲音、 圖片、郵件等。在沒有可以相互比較的的服務品質測量規範情形下,且各種觸覺 裝置在機構上的設計差異,均可能造成本研究在 Haptic device 的觸覺感知分析實 驗產生較不客觀的問題,基於觸覺回饋服務品質整理簡介 MOS(Mean Opinion2.2.1 觸覺回饋品 MOS 服務品質測量簡介
MOS(Mean Opinion Score:MOS)平均意見值,常以衡量通訊系統語音質量品 質的重要指標,測詴者的需在特定環境透過收集測詴者在不同情境下的主觀感受, 再根據 ITU-T 所建議之分析方式測得該語音品質。ITU-T 對測詴要求非常嚴謹, 除了操作流程需依規定嚴格執行外、對誤差處理、環境噪音、相容性、受測者、 接收者…等等都做出詳細嚴格規定,解此方式來測詴出受測者的使用感受及網路 品質來比較出結果。
相關研究如文獻[8],Tatsuya Watanabe 等人為了測詴評估 Delay 對於 Haptic device 在網路傳輸的服務品質,系統設計上採用有線 peesr-to-peer 做為系統架構。 在 Terminal 上加裝監看系統監看 Slave 端,經由 Master 端控制書寫特定字體或圖 形如圖 4 所示。設計使用者測詴時間規範測詴年齡及男女比例來逐一測詴,擷取 Slave 端受測者所測得之 MOS 值,以 ITU-R BT.500-11[9]製作出評分量表來定訂 出使用者在加入網路損耗時對於 Haptic device 感受程度如表 2-1 所示。除了寫特 定字體外也有測詴兩端連線玩虛擬遊戲借由敲擊曲棍球所得到感知[6],以上兩個 範例是一對一的測詴情形下所顯示之 Delay,不同的延遲對系統的模擬環境呈現 不同步的影響;如此方式的評測 Haptic device 觸覺感知的方式較為廣泛如文獻[10] 所示,依然可看到如表 2-1 五級質量評分表做評測對照。
圖 4、遠端控制系統配置[6]
表 2-1、五級質量評分表[6]
Score Description 5 Very easy to write (draw) 4 Easy to write (draw) 3 Neither easy nor difficult 2 Difficult to write (draw) 1 Very difficult to write (draw)
除了一對一測詴方法,許多研究也對於一對多的測詴方式進行研究。同時測 詴不同類型的 Haptic device,評估各 Haptic device 之 MOS 值[11]或是連接視訊、 耳機和 Haptic device 做雙向傳輸[12]測詴,這一對多項設備實驗範例所設置之 Delay 遠低於一對一實驗所設置的 Delay 參數,主要介於 0 ms 到 60 ms Delay 測 詴參數為實驗基準,並以隨機挑選 Delay 參數方式下達指令來分析使用者的感知
由於目前並沒有定義 Haptic device 服務品質的方法,在上述所列出之實驗所 採用標準為 ITU-R BT.500-11[13]。在相關研究裡也有採用 ITU-R P800[3][15]、 ITU-R BT.500-12[6][14]等等標準,來針對 Haptic 之 MOS 值相關研究,彙整相關 的文獻顯示,多數以採用標準 ITU-R BT.500-11 佔較高比例。
2.2.2 Haptic device 觸覺回饋於網路分析簡介
在多數實驗以 MOS 值來作為判斷觸覺感知系統在網路損耗影響下使用者對 於觸覺回饋的感受程度外,Kian Meng Yap 等人研究中[3]將觸覺感知系統以分散 式觸覺虛擬環境(Distribute Haptic Virtual Environment: DHVEs),DHVE 的架構主 要是以 Slave-Master 或 peer-to-peer 形式進行實驗,經由路由器提供品質服務保證 (Quality of Service: QoS)的方式。而測詴平台送出之封包都頇經過 Diffserv 處理後 顯示了每個路由器的輸出端觸覺和背景流量配置如圖 5 所示,並嘗詴解決 Burst Packet loss 問題。文獻中測詴出觸覺回饋系統在網路損耗之耐受程度與各類多媒 體網路服務類型做比較如表 2-2。
表 2-2、DHVE Haptic traffic versus other service types network parameters summary [3]
Traffic Characteristics QoS Requirements
Haptic
Transmission rate of 1000 packet/sec. Constant packet rate.
Sensitive to Jitter and Delay.
Delay < 50ms.
Throughput 500kbps-lMbps Jitter < ~ 2ms.
Packet loss< 10%
Voice
Alternative talk spurts Silence interval
Talk-spurts produce constant-size packets
Delay <150ms
Throughput 8kbps – 200kbps Jitter < 30ms
Packet loss < 1%
Video Highly bursty traffic
Long range dependencies
Delay <400ms
Throughput 1.4Mbps – 5Mbps Jitter < 30ms
Packet loss < 1%
Data Poisson type distributions
Long range dependencies
Zero or near-zero Packet loss Delay may be important
由於有線網路實驗測詴飽和情形下,觸覺回饋系統逐漸應用於無線網路實驗, Kian Meng Yap 等人[16]將 Haptic 架設於無線網路中藉由無線跳數的增加測量出 虛擬物體位置同步、力道計算和遠端筆尖位移誤差。作者利用觸覺回饋裝置的 X 軸分析出在無線網路不同跳數時不同的網路協定(wireless-b\g\n)所呈現筆尖及力 道誤差的情形並開發出演算法來修正誤差。
以上研究是以 Haptic device 書寫已知字體或是繪出特定圖形來表現出網路損 耗的影響,並利用國際電信聯盟(International Telecommunication Union:ITU)[17] 所制定標準來制定出 MOS 值來做為研究標準,逐漸發展至無線網路中進行多跳 實驗測詴。但上述研究均利用 ITU 所制定之語音 MOS 值表現當網路損耗時對於 Haptic device 觸覺回饋的影響。但是 Haptic device 觸覺回饋的網路頻寬要求與一 般語音有著相當大的差異,因此本研究首先證明了 Delay 會造成設備動作及影像 同步的延遲、Jitter 在設備上產生了抖動和不穩定因素、Packet loss 會讓 Haptic device 力道減少以及提升中斷連線的可能性,這也將會是本論文所著重之實驗重 點。
2.3 軟體定義網路(SDN)相關文獻探討
軟體定義網路(SDN)是一種新型態的網路管理架構,其基本設計構想是為 了提供在現有網路中針對大規模數據流量與數據應用之解決方案,而傳統網路資 訊發送的傳輸路徑 (Data Path) 皆由硬體路由器 (Router) 決定,造成各硬體自行 指定資訊傳輸路徑,在原有路徑失敗的狀況下,將造成大量的重複傳輸,浪費系 統資源,當使用者希望更新傳輸方式時,則需由手動更新硬體內的軟體,造成使 用 者 在 使 用 上 的 不 便 , OpenFlow 則 將 傳 輸 路 徑 的 規 劃 交 給 專 責 的 控 制 器 (OpenFlow controller),能視傳輸需要最佳化傳輸路徑,以便提高網路的速度、可 靠性和安全性等問題。其基本架構是把當前網際網路節點中決定封包如何轉發的 複雜控制邏輯從交換機與路由器等設備中分離出來,以便通過軟體程式設計來實 現硬體對資料轉發規則的控制,最終達到對數據流量進行操控的目的。
2.3.1 軟體定義網路技術於網路之簡介
SDN 分離傳統網路設備的 Data Plane 和 Control Plane 兩個功能模組,通過集 中式的控制器 (Controller) 以標準化的介面對各種網路設備進行管理和配置,文
構中廣泛的部署,並在學術及產業界造成一股新興網路研究之潮流。有鑑於 OpenFlow 在數據流分析與分類的優勢。
OpenWrt 嵌入式作業系統
OpenWrt[19]是一個模組化的嵌入式 Open-Source Linu,並擁有完整的網路支 援方案,當前多被用於工業用嵌入式控制系統、小型機器人、感測器網路、智慧 家居、VoIP 系統、無線與有線網路閘道器等。系統提供了一個可添加軟體包的可 寫的檔案系統可讓使用者可以自由的選擇應用程式和配置,而不必受裝置提供商 的限制。OpenWrt 支援 ARM、X86、PowerPC、MIPS 等系統架構並且可以使用 一些適合某方面應用的軟體包來客製化裝置。對於開發者來說,OpenWrt 提供完 整的開發工具鏈(toolchain)、核心(linux kernel)、軟體套件(packages) ,再到根檔 案系統(rootfs),用戶只需簡單的一個 make 命令即可方便快速地定制一個具有特 定功能的嵌入式 Linux 系統。開發者不必麻煩的構建整個韌體就能得到想要的應 用程式,OPKG 包含超過 3500 個軟體套件,也預設使用 LuCI 作為 web 互動介面 便於使用者控制。
OpenFlow 協定 OpenFlow[20]是一個由史丹佛大學所開發的開放協定,發展源自於為了測詴 與觀察自訂的實驗性網路協議在校園網路上的行為,文獻[21]中提到現存的網路 架構已經逐漸缺乏創新與僵化,原因是大多的網路設備與網路協議都是 installed base 的,任一台 switch/router 在生產階段就已經注定好它在網路架構中該做的行 為。有鑑於此,他們提出了 OpenFlow 的想法,第一項目標就是將原本僵化網路 架構的傳統 switch 改為更具彈性的 OpenFlow Switch,如下圖 6 所示。
... Secure Channel sw hw Flow table
OpenFlow
Switch
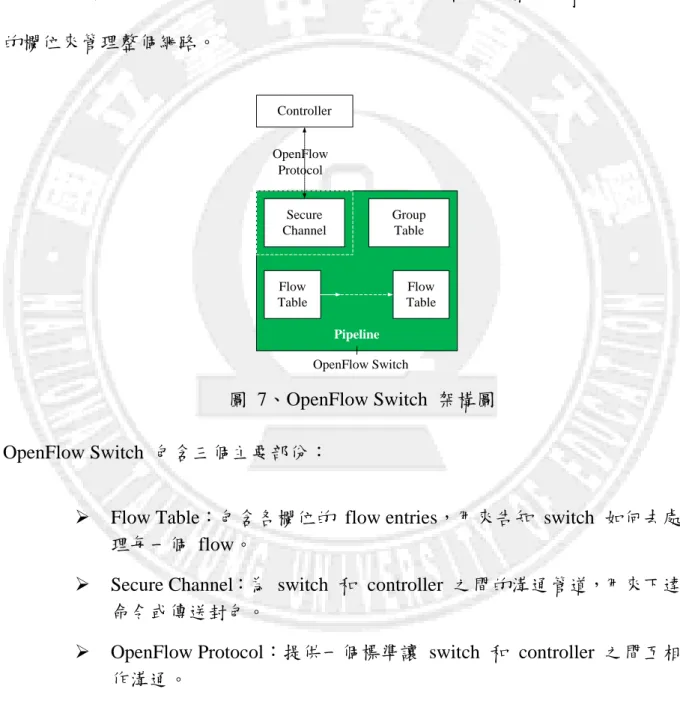
controller OpenFlow Protocol可以讓網管人員自行定義與設計 OpenFlow Switch 的網路行為。OpenFlow Switch 主 要 是 透 過 控 制 器 (Controller) 來 控 制 網 路 行 為 , 並 透 過 OpenFlow Protocol 和 Secure Channel 與 OpenFlow Switch 溝通處理如圖 7 所示。OpenFlow Switch 的封包傳遞是以 Flow Table 的方式呈現,可以利用新增或刪除 Flow Table 的欄位來管理整個網路。
圖 7、OpenFlow Switch 架構圖 OpenFlow Switch 包含三個主要部份:
Flow Table:包含各欄位的 flow entries,用來告知 switch 如何去處 理每一個 flow。
Secure Channel:為 switch 和 controller 之間的溝通管道,用來下達 命令或傳送封包。
OpenFlow Protocol:提供一個標準讓 switch 和 controller 之間互相 作溝通。 Secure Channel Group Table Flow Table Flow Table Pipeline Controller OpenFlow Switch OpenFlow Protocol
而在 Flow Table 中,主要有三個部分,其中包含:
Match fields:定義每一個 flow entry,如何與封包進行比對。 Counters:紀錄符合該 entry 的封包訊息。 Instructions:定義了針對該 entry 的封包,所應採取的動作。 目前所探討的 SDN 架構中最為重要的就是 Controller,它可說是 SDN 的核心, 所以在 Controller 的選擇部分也變得相對重要。文獻[22]中分析了目前主流的五種 Controller: Ryu
是一個 component-base 的 Controller,提供了 well-defined API 讓開發者更容 易開發網路管理與控制應用,這種 component-base 的設計模式能幫助使用者達到 特定的需求,開發者可以快速的修改現存的 component 或是再創建其他 component 來確保底下的網路會照著應用程式所指定的行為運作。而目前 Ryu 可支援到 OpenFlow1.4。
POX
以 Python-based 的 Controller,應用於 SDN debugging、網路虛擬化、控制器 設計和程式化模組上。其底層模組由 C++實現,上層應用可以用 C++或 python
OpenFlow witch 進行溝通,且可用於軟體定義網路的基礎研究,比如 SDN 測詴、 網路虛擬化、控制器設計…等等。
FloodLight
由數個模組所組成,各個模組透過 Java API 或是 REST API 提供服務給其他 模組或是邏輯控制程式,可以在 Linux、 Mac 和 Window 作業系統上執行。其特 色有: (1)提供模組載入系統,使得擴建與提升更為容易(2)支援範圍廣泛的實體與 虛 擬 OpenFlow Switch(3) 能 處 理 OpenFlow 或 非 OpenFlow 的 網 路 (4) 支 援 OpenStack 雲端運算平台。
Trema
用來開發 OpenFlow controller 的開方式架構,提供開發者一個測詴 controller 的平台,Trema 的設計精神在於他的容易撰寫特性與效能,使用 Ruby 作為 scripting language 來增加生產力;使用 C 作為 compile language 來提升效能。
OpenDaylight
是一個 Open source 計畫,此計畫的目標是創造出一個涵蓋所有 SDN 的主要 元件的編碼。提供了具網路程式能力的開發平台,利用 OpenDaylight 來監控網路 與 OpenStack 密 不 可 分 。 OpenDaylight 軟 體 是 由 不 同 元 件 所 組 成 , 例 如
fully-pluggable controller、interface 和其他應用程式。
Open vSwitch
Open vSwitch,簡稱 OVS 是一個虛擬交換軟體,主要用於虛擬機器 VM 環境, 作為一個虛擬交換機,支援 Xen/XenMaster、KVM 和 VirtualBox 多種虛擬化技術。 在機器的虛擬化環境中,一個虛擬交換機(vswitch)主要有兩個作用,一個為傳遞 虛擬機器 VM 之間的流量,以及實現 VM 和外界網路之通訊。在網路中,交換機 和橋都是一個概念,OVS 實現了一個虛擬機的乙太交換機也就是乙太網路橋接器 的功能。
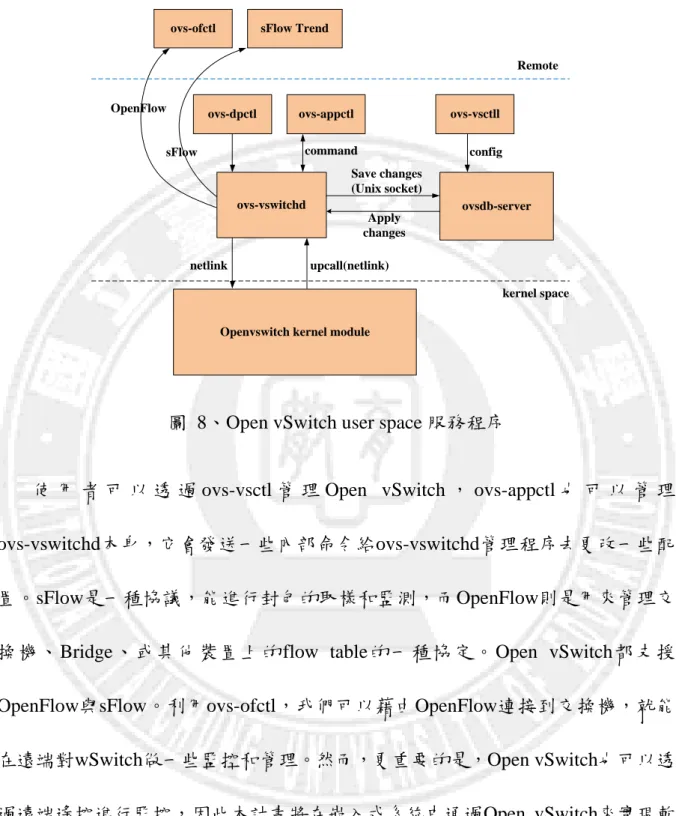
Open vSwitch user space包含幾個組成部分:主要目的是實現了switch、flow table、和幾個工具來管理交換機和數據庫。Open vSwitch服務會啟動三個程序:
ovs-vswitchd,這是整個 switch 執行的核心。
ovsdb-server,負責操縱 switch 的 configuration 和 flow。 ovs-brcompatd,使 vswitch 保持與傳統網路 bridge 的兼容性。 Open vSwitch user space 服務程序如圖 8 所示:
圖 8、Open vSwitch user space 服務程序
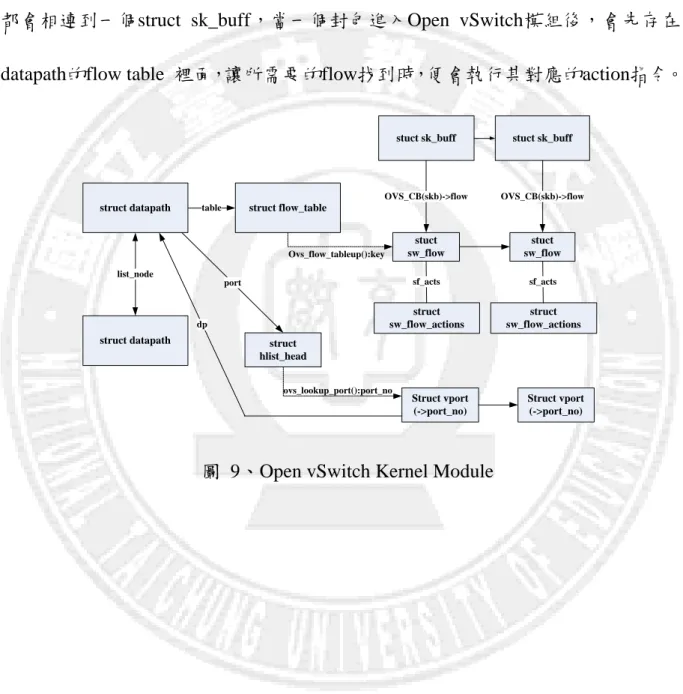
使 用 者 可 以 透 過 ovs-vsctl 管 理 Open vSwitch , ovs-appctl 也 可 以 管 理 ovs-vswitchd本身,它會發送一些內部命令給ovs-vswitchd管理程序去更改一些配 置。sFlow是一種協議,能進行封包的取樣和監測,而OpenFlow則是用來管理交 換機、Bridge、或其他裝置上的flow table的一種協定。Open vSwitch都支援 OpenFlow與sFlow。利用ovs-ofctl,我們可以藉由OpenFlow連接到交換機,就能 在遠端對wSwitch做一些監控和管理。然而,更重要的是,Open vSwitch也可以透 過遠端遙控進行監控,因此本計畫將在嵌入式系統中通過Open vSwitch來實現軟 體定義網路。在Kernel space中,flow被表示為struct sw_flow,datapath被表示為 struct datapath,而flow上被指定的動作則被表示為sw_flow_actions,並加上我們
OpenFlow
ovs-vswitchd ovsdb-server
ovs-dpctl ovs-appctl ovs-vsctll
ovs-ofctl
Openvswitch kernel module sFlow Trend Remote kernel space command config Save changes (Unix socket) Apply changes netlink upcall(netlink) sFlow
提到的struct vport。這些結構在Open vSwitch kernel module 是相當重要的,其結 構如圖9所示。struct sk_buff是一個指標指向control block,而每一個struct sw_flow 都會相連到一個struct sk_buff,當一個封包進入Open vSwitch模組後,會先存在 datapath的flow table 裡面,讓所需要的flow找到時,便會執行其對應的action指令。
圖 9、Open vSwitch Kernel Module
struct datapath stuct sw_flow struct flow_table table struct datapath list_node
stuct sk_buff stuct sk_buff
stuct sw_flow OVS_CB(skb)->flow OVS_CB(skb)->flow struct sw_flow_actions struct sw_flow_actions struct hlist_head Struct vport (->port_no) Struct vport (->port_no)
port sf_acts sf_acts
dp
ovs_lookup_port():port_no Ovs_flow_tableup():key
2.3.2 OpenFlow 之 QoS 文獻研究
隨著網路技術的快速發展,網路服務日益多元化,網路帶寬逐日擴大,新型的網路 廣泛應用包括視訊通話、電話會議、VOIP等,使得人們對服務品質(Quality of Service, QoS)要求越來越高,且收到大眾的關注。目前市面上的網路交換器及路由器都有提供基 本的服務品質(Quality of Service,QoS),對於如何將QoS支援OpenFlow協定,在產生創 新的網路協定同時也離不開一些機制來控制頻寬和延遲以確保流量及干擾為最小才能 有利於資料在傳輸。 文獻[23]利用Floodlight和Pronto 3290實作,在controller端加入些Interface,使其成為 具動態調整QoS功能之SDN網路,針對進入網路的packer header進行分析,判斷所屬類 型(TCP、UDP…);也能利用LARAC演算法計算出目前網路狀態來達到動態調整的功 能,並利用UDP和HTTP來傳送video進行分析。[24]中利用OF-CONFIG對queue進行配置 和控制,加上在Controller端開發許多模組去達成QoS。OF-CONFIG為一個開放式介面, 用於配置及控制OpenFlow Switch,有鑑於此,可對每個queue裡面的封包進行辨識及標 記如加入IP位址、MAC位址或封包類型…等等,針對不同的標記給予不同的QoS。[25] 利用POX和Mininet模擬,撰寫五個controller端的application unit,主要是用來針對封包 的身分做辨別以及監控目前的網路環境,並搭配MLMP演算法計算出high quality的路 徑;而當處於壅圔網路環境時,會啟動delete指令給switch並將網路環境重新分配。文獻[26]指出,現行的OpenFlow所支援到的QoS,僅僅是針對頻寬去做調整,或是簡單的FIFO 排程,這裡提出利用Netlink Message去對Linux kernel進行增加或刪除不同的排程配置, 並針對不同的排程(HTB、RED…)進行效能分析。 文獻[27]說明,利用頻寬分配的概念,來達到雲端中各個使用者的QoS。在雲端中, 資源的有效分配是一個重點,但如何能夠動態並及時的調整適用於目前的網路環境中的 方法不盡相同,而這裡是利用SDN的架構下去完成。[28]利用較高的QoS來進行多媒體 資料的傳送,也在controller端開發子系統,如網路監控和封包遺失率的計算等,而當子 系統偵測到網路環境處於壅圔的情形下,Controller端會將目前的路徑轉移到另一條路徑 來達成QoS的功能。 [29][30]針對不同ISP或不同網域的網路環境,在controller端自行開發模組去計算網 路目前環境,而達到動態調節QoS的功能。[31]說明,利用基於標籤的方法達到利用記 憶體的最高彈性,透過配置搜尋的演算 法、software controller執行快速incremental update program在硬體架構上提供最佳查找效能,透過配置最好的algorithm的執行組,並給flow
entries一個型別。
與傳統交換器進行網路效能的測詴。在傳輸速率方面,傳統交換器能使用到頻寬的9 成,而SDN交換器在TCP傳輸只能用到TCP傳輸速率只有25.70Mbps,而UDP傳輸速率卻 只有0.10Mbps。而在延遲時間方面,SDN交換器每個封包約需1.52 ms的延遲時間,因此 整體延遲時間約為傳統交換器的13.23倍。因此單以上述文獻針對SDN交換器與傳統交換 器的比較,因交換器CPU時脈不高且在User Space 模式下實現OpenFlow架構,導致SDN 交換器效能遠低於傳統交換器。因此本研究將移植OpeFlow於Linux Kernel Space中,以 提升SDN交換器之傳輸效率。
第三章
Haptic device 筆尖移動位置與網路品質
本章節將介紹觸覺回饋裝置於網路中之品質測詴方法,因觸覺感知裝置在國 際電信聯盟(ITU) 並沒有制定出標準,常見用於 Haptic device 之 ITU 測量標準如 ITU BT 500-11、ITU BT 500-12 或是 ITU-R P800 等等。但這些標準原始的測詴是 用於判別語音或影像,但 Haptic device 並非影像,基於資料流型態以及 Haptic device 的運行特性與語音及影像有相當大的不同。因此,本研究期望能藉由自行 開發測詴環境,在網際網路環境下將兩組 Haptic device 經由有線網路連線方式, 透過擷取出的 Haptic device 移動座標路徑並自動繪出圖形。由於兩端 Haptic device 筆尖位置座標與時間變化,所呈現量化後 Haptic device 兩端之筆尖路徑相 似度,提出分析感知回饋傳輸於有線網路中品質判斷的測詴方法。
3.1
Haptic device 之 End-to-End 系統架構
圖 10、Sending the master tip position data to slave
本章節將介紹如圖 10 所示,實驗架構設計上以分散式虛擬環境(Distribute Virtual Environment: DHVEs) 所 架 設 之 測 詴 環 境 為 點 對 點 架 構 方 式 連 接 。 Terminal1 和 Termina2 以 IP/UDP 協定傳輸其實驗設備如表 3-1 中型號為 AS-D670, Network Emulator 主要作為網路非理想參數模擬器其模擬設備如表 3-1 中型號為 Veriton M480,可下達 Delay, Jitter 與 Packet loss 等網路損耗參數。在 Haptic device 連線互動期間為雙向封包傳輸,所以需同時在 Network Emulator 針對兩張網卡下 達指令以求時間同步以分析網路環境參數。Terminal1 和 Terminal2 中間封包傳輸 Y Z X Terminal 1 Terminal 2 Network emulator Synchronous clock 1394 Phantom Ethernet Y Z X 1394 Phantom
經由 Network Emulator 模擬器轉送之工作,傳輸協定為 User Datagram Protocol (UDP)。PHANTOM Omni 連線分別使用 1394 介面與 Terminal1 和 Terminal2 電腦 相連接。兩端 PHANTOM omni 分別以 Slave/Master 連結方式運行,在此實驗由 Master 傳送座標 Slave 繪出圓形、正方形和鋸齒,經由外部時間同步計數器 RTC(Real time clock)經由 UART 傳送同步時間精度為毫秒(ms)。並在 Network Emulator 上開起 wireshark 監控兩張網卡之間封包傳輸情形,以便於數據比對驗 證。 表 3-1、實驗電腦規格表 型號 AS-D670 Veriton M480 中央處理器 INTEL Pentium 4 3.2/3.4GHz Intel Core 2 Quad 2.66GHz 記憶體 DDR400/ 2GB 2GB x 1 DDR3 1066 網路介面 10/100/1000 Mbps LAN 10/100/1000 Mbps LAN 輸出入埠 IEEE 1394 x 1 作業系統 Windows XP Professional Ubuntu 10.04
本研究模擬真實網路環境使用了 Linux Network Emulator 產生 Delay、Jitter 和 Packet loss 網路損耗參數,也可進行封包重新排序、速率控制和流量生成之功能 設置。Linux 核心版本需在 2.6 以上才有支援此模擬,若要 Packet loss 指令則要新
由 Network Emulator 產生 Delay、Jitter 和 Packet loss 網路損耗,並測量出 Master Haptic 傳送之封包經過 Network Emulator 後抵達 Slave Haptic 後,分析 Delay、Jitter 和 Packet loss 等網路損耗對於 Slave Haptic 產生之影響,並記錄及分析 Haptic 封 包在網路中受到網路損耗而產生之結果。
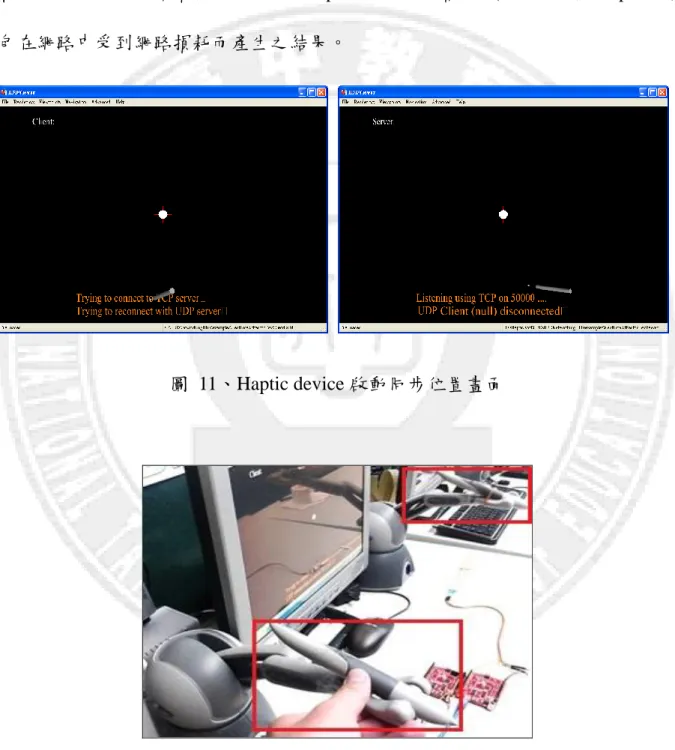
圖 11、Haptic device 啟動同步位置畫面
本實驗針對 Haptic Master/Slave 與 Delay、Jitter 和 Packet loss 網路損耗作為 主要分析目標,圖 11 中實驗期間需做筆尖同步,Master 端傳送座標時 Slave 端也 會跟著移動,實驗方法如圖 12 所示。當 Master 傳送圖形座標繪圖時 Slave 端會 因 Network Emulator 所設定之 Delay、Jitter、Packet loss 參數而影響 Haptic device 而造成延遲和抖動;移動時擷取 X、Y、Z 位置並給予時戳以分辨起始時間。
3.2 網路 Delay 對 Haptic device 影響分析
Haptic device 為了維持兩台觸覺裝置之間的互動即時性使用了 UDP 協定, Master 端傳送 500 packets/s 到 Slave 端,Slave 端接收到 Master 送來的封包後會 將目前移動的位置同樣以 500 packets/s 回傳至 Master,因此共計為 1000 packets, 分別逐次加入 10ms、50ms、100ms、150ms 和 200ms 參數至 Netwotk Emulator, 再由 Slave 端所繪製成的圓形、正方形及鋸齒。當 Delay 參數的逐漸增加 Slave 端接收到的封包數量不變,但因傳輸封包時間延遲的結果造成 Slave 端在繪製圖 形比 Master 端緩慢而圖 13、圖 14 及圖 15 分別為各圖形因 Delay 而產生的距離 誤差。由圖 16 的結果可知,Delay 時間越大時,Haptic 兩端的座標誤差值越大。 在本實驗中觀察到,Delay 僅造成的座標距離的誤差,Haptic 兩端的座標仍保有
標偏移,因為 Jitter 與 Packet loss 所產生的抖動將造成 Haptic 兩端的座標相似度 產生明顯的差異性。而 Delay 僅在於 Haptic 接收時間延遲,Slave Haptic 將依然 接收到之座標資訊完整畫出且幾乎不會有抖動的問題產生。
(a)沒加入任何 Delay 參數值 (b)加入 10ms Delay
(e) Delay 150ms (f) Delay 200ms
圖 13、Haptic device 繪圓形時 Delay 時間逐漸增加,Master 和 Slave 分別位置
(c) Delay 50ms (d) Delay 100ms
(e) Delay 150ms (f) Delay 200ms
(a)沒加入任何 Delay 參數值 (b)加入 10ms Delay
(c) Delay 50ms (d) Delay 100ms
(e) Delay 150ms (f) Delay 200ms
圖 16、Delay 對 Haptic 所造成的影響
3.3 網路 Packet loss 對 Haptic device 影響分析
利用 Master 端傳送 1000 筆標準座標給 Slave 端接收並經由 Haptic device 繪出 圖形如圖 17 所示。繪製圖形的過程中會因 Haptic device 為了修正所繪出圖形的 誤差而有本身演算法的修正機制而補入座標插點,在此將以 Slave 端繪製出圖形 來比較相似度,藉此證明封包經過網路損耗後所產生的座標誤差和 Haptic device 表現出的現象。在下圖 18、圖 19 和圖 20 中分別呈現了圓形、正方形和鋸齒等圖 形。藍色圖形為標準的圖形座標,紅色圖形為 Slave 端 Haptic device 所繪。這些 標準圖形座標是以公式帶入 Excel 所計算出 1000 筆座標點。
de
la
y
距
離
誤
差
Slave位置
Master位置
在前一節圖形 Delay 以及目前 Packet loss 或之後所述之 Jitter 經由 Slave 端繪 出之圖形可以發現 Network Emulator 沒有加入任何網路損耗參數,Slave Haptic 端所呈現之圖形會些許變形或是不規則。由於本研究實驗僅著重於網路損耗對於 Haptic device 會造成那些影響,並不加以考慮 Haptic device 機器摩擦損耗及移動 角度或慣性運動以致繪圖表現不佳等情形已表現出設備真實如圖 18 中(a)圖所繪 出的圓左上方圖形些許凹陷以及正方形在轉角處因慣性運動而變形等情形。上述 之情形會在相似度計算中進行判別讓相似度誤差降低。 圖 17、Master 端傳送座標至 Slave 端接收並繪圖 Y Z X Network emulator Synchronization clock 1394 Haptic device Ethernet Position data Master Slave
以國際電信聯盟 ITU-800 為標準來評斷出使用者平均意見值(MOS)。而文獻[34] 中則是使用比較低的 Packet loss rate 參數值 0%,、2%、4%、6%、8%、10%、15%、 20%、25%、30%、40%和 50%測詴 MOS 值。
表 3-2、Random Packet loss 判斷 MOS 值
Random Packet loss(%) MOS
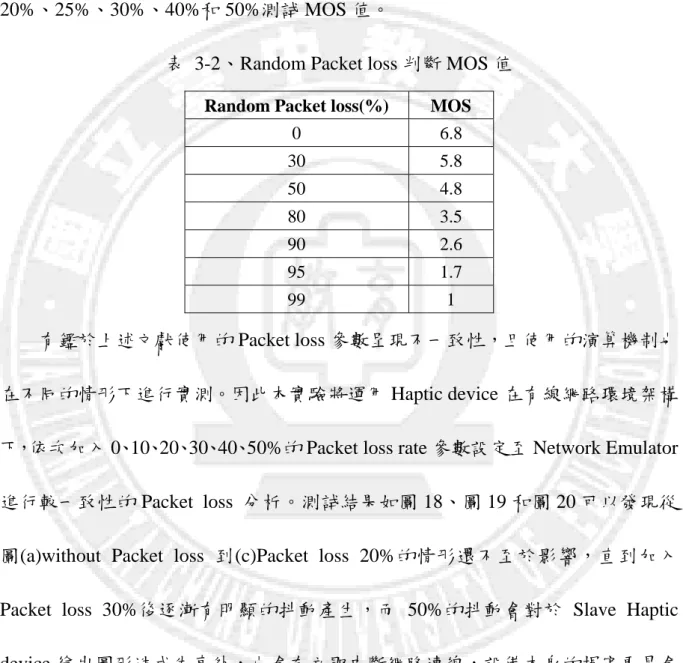
0 6.8 30 5.8 50 4.8 80 3.5 90 2.6 95 1.7 99 1 有鑑於上述文獻使用的 Packet loss 參數呈現不一致性,且使用的演算機制也 在不同的情形下進行實測。因此本實驗將運用 Haptic device 在有線網路環境架構 下,依次加入 0、10、20、30、40、50%的 Packet loss rate 參數設定至 Network Emulator 進行較一致性的 Packet loss 分析。測詴結果如圖 18、圖 19 和圖 20 可以發現從 圖(a)without Packet loss 到(c)Packet loss 20%的情形還不至於影響,直到加入 Packet loss 30%後逐漸有明顯的抖動產生,而 50%的抖動會對於 Slave Haptic device 繪出圖形造成失真外,也會有立即中斷網路連線,設備本身的損害更是會 因抖動過於劇烈而設備本身損壞斷裂。此一測詴方式主要在量測 Haptic device 在 Packet loss 的耐受程度可到達到多少承受範圍也必需確保實驗設備的正常工作。
(a) Without Packet loss (b)Packet loss 10%
(e) Packet loss 40% (f) Packet loss 50% 圖 18、Haptic device 繪製圓形時各 Packet loss 參數對圖形之影響
(c)Packet loss 20% (d)Packet loss 30%
(e) Packet loss 40% (f)Packet loss 50% 圖 19、Haptic device 繪製正方形時各 Packet loss 參數對圖形之影響
(a)Without Packet loss (b)Packet loss 10%
(c) Packet loss 20% (d) Packet loss 30%
(e) Packet loss 40% (f) Packet loss 50% 圖 20、Haptic device 繪鋸齒時各 Packet loss 參數對圖形之影響
3.4 網路 Jitter 對 Haptic device 影響分析
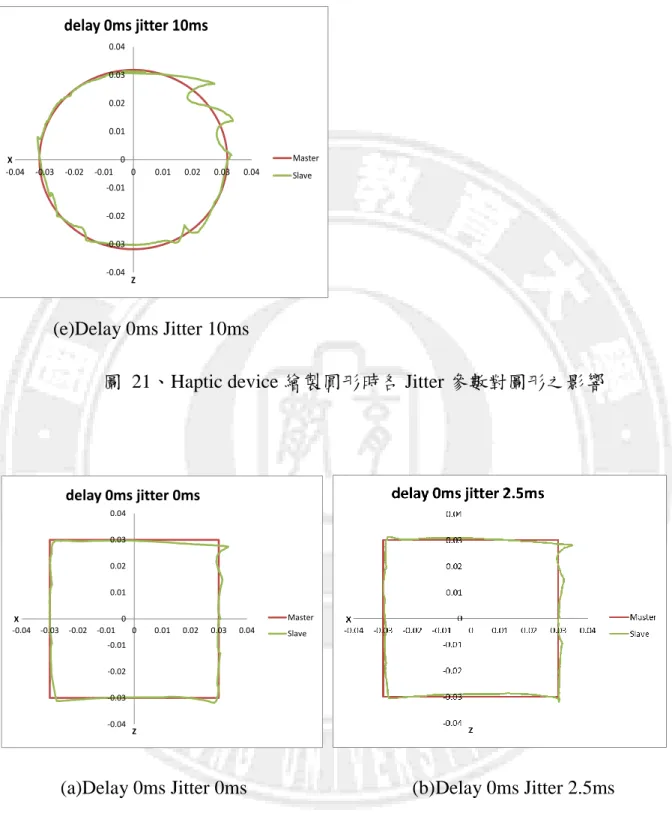
傳統的公眾通訊網路像是語音電話網路,不但非常可靠且品質是非常穩定, 但在於 IP 網路如 Internet 不但可靠度遠不及傳統通訊網路,其執行的即時性訊號 服務品質也非常不穩定,在此本節將討論網路損耗中除了 Delay 和 Packet loss 外, Jitter 對於 Haptic device 容忍程度可達多少範圍。Jitter 在傳統語音服務上不像 Packet loss 較容易被使用者接受,因為在語音交談中若有小部分的語音封包丟失, 並不一定會影響對方對於通話內容的了解,若音訊丟失了影響了通話清晰度,只 需重複講述小部分內容即可且容忍度也較高。相反的,語音使用者卻對於抖動 (Jitter)極為敏感,微小的抖動都可能被使用者察覺,這是以語音方式來了解 Jitter 的影響。但在 IP 網路中,封包到達時間目的地時間長短不一更是容易有 Jitter 的 產生,對於 Haptic device 的影響更是劇烈。在實驗中發現 Haptic device 對於 Jitter 是非常敏感,以致加入參數值不能過高。在此依序實驗帶入 0、2.5、5、7.5、10ms 的 Jitter 參數所繪出圖形如下圖 21、圖 22 及圖 23 所繪之圖形,當 Jitter 參數超過 5ms 後 Haptic device 抖動逐漸加劇,增加至 10ms 繪製的圖形因承受不了抖動而 變形呈波浪狀, 這是因為 Haptic device 在移動時遭遇了 Jitter 影響。但為了回到 目前更新之新座標 Haptic device 必頇將移動中的筆尖拉回至正確的位置而所記錄
讓連線中斷以保護設備使用上的安全,這是為何本實驗中不再將參數提高測詴的 原因。
(a)Delay 0ms Jitter 0ms (b)Delay 0ms Jitter 2.5ms
(e)Delay 0ms Jitter 10ms
圖 21、Haptic device 繪製圓形時各 Jitter 參數對圖形之影響
(a)Delay 0ms Jitter 0ms (b)Delay 0ms Jitter 2.5ms -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 10ms Master Slave -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 0ms Master Slave
(c)Delay 0ms Jitter 5ms (d)Delay 0ms Jitter 7.5ms
(e)Delay 0ms Jitter 10ms
圖 22、Haptic device 繪製正方形時各 Jitter 參數對圖形之影響 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 5ms Master Slave -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 7.5ms Master Slave -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 10ms Master Slave
(a)Delay 0ms Jitter 0ms (b)Delay 0ms Jitter 2.5ms
(c)Delay 0ms Jitter 5ms (e)Delay 0ms Jitter 7.5ms -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 0ms Master Slave -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 2.5ms Master Slave -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 5ms Master Slave -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter 7.5ms Master Slave -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 X Z delay 0ms jitter10ms Master Slave
3.5 圖形相似度與網路品質測詴結果
本章節之主要目標是經由分析 Slave Haptic device 端所繪製圖型的相似度來 分析網路損耗對 Haptic device 的影響。分析方法主要是採用圓形、正方形及鋸齒 線等三種不同圖形分別進行實驗。在此計算圖形相似度利用了圖形是由座標組成 的特性來平均計算出圖形範圍,而每一次繪製出之圖形會有些許不同,所以每一 個圖形的範圍值都必頇經由十個圖形平均制訂定出該次圖形實驗的相似度範圍。 如圖 24,圓形在 Slave 端繪製時因圖形的變形而會產生不規則內凹或外击。本實 驗需先繪出十個圖形並將圖形中與標準圓周距離差最大值及最小值篩選出,將十 次圖形的最大值與最小值分別平均定義出圓圖形的篩選範圍,應用這樣的範圍值 判斷出每個圖形的相似程度。而在正方形以及鋸齒也都可用此方式來判斷出每圖 形相似程度如圖 25、圖 26 所示,而圓形和正方形的相似度計算較明確,而鋸齒 相似度的比較還需計算出斜率和座標點的垂直距離進行計算才能判斷出圖形相 似度。
圖 24、圓形相似度範圍判斷 篩選範圍 標準圓周 不規則內凹 不規則外击 標準半徑r X 相似度範圍
圖 26、鋸齒相似度範圍判斷
本實驗中 Packet loss 對 Haptic device 呈現一定程度的影響,尤其在網際網路 中 Packet loss 出現的機會將更高,無論是用 TCP 或 UDP 協定,進行傳輸時均有 因網路壅圔而掉包之機率,因此實驗加入了 Packet loss 參數設定,模擬出 Packet loss 的隨機環境進而測詴 Haptic device 在具 Packet loss 機率之環境下實測。Packet loss 的影響在前 3.3 節已有大致敘述過,Slave Haptic Device 會產生嚴重抖動和斷 線是無可避免。在表 3-3、表 3-4 和表 3-5 就分別實測出 Packet loss 對於 Haptic device 的影響曲線,對於圓形與正方形來說在 Packet loss 30% Haptic device 是可 以正常運作但超過 30%以上之 Packet loss 就會出現抖動和斷線的可能,且圓形相 似度已下降至 65%以下,可見 30%以上之 Packet loss 已不適合繼續進行 Haptic 網
d d
d d
路傳輸。而正方形在 40%之 Packet loss 還有 85%以上之圖形相似度,可見正方形 對於 Packet loss 耐受程度較圓形為高。而圖 27、圖 28 和圖 29 所示相似度也會因 Packet loss 參數過高導致 Slave 端中斷連線。
表 3-3、Packet loss 參數下的圓型相似度
Packet loss rate(%) Circular path(%)
0 92.76 10 90.70 20 86.48 30 80.75 40 63.75 50 33.70 60 16.77 70 X 0 10 20 30 40 50 60 70 80 90 100 0 10 20 30 40 50 60 Ci rc u lar p ath (% ) Slave
表 3-4、Packet loss 參數下的正方形相似度
Packet loss rate(%) Circular path(%)
0 97.48 10 97.00 20 93.22 30 90.73 40 86.41 50 42.16 60 X 圖 28、正方形相似度直條圖 而鋸齒在 40% Packet loss 還有 80%的圖形相似度,如實驗所示鋸齒對於 Packet loss 的容忍值比圓形和正方形高。而圓 Packet loss 達 70%則無法執行,正 方形與鋸齒 Packet loss 達 60%就無法執行繪圖,可見 Haptic device 在 Packet loss
0 20 40 60 80 100 0 10 20 30 40 50 Sq u ar e si m ilar ity (% )
Packet loss rate(%)
中可繪製之圖形以繪製圓是較容易,因圓形不像正方形及鋸齒等圖形有需轉折的 角度而僅有弧度較容易執行繪製。
表 3-5、Packet loss 參數下的鋸齒相似度
Packet loss rate(%) Sawtooth similarity (%)
0 99.62 10 95.29 20 92.78 30 89.51 40 88.36 50 72.81 60 X 圖 29、鋸齒相似度直條圖 0 20 40 60 80 100 0 10 20 30 40 50 Sawt o o th si m ilar ity (% )
Packet loss rate(%)
在此 Jitter 分別整理出每一個圖形在不同 Jitter 參數下趨勢曲線,除了測詴出 Delay 0ms Jitter 0ms、2.5ms、5ms、7.5ms 和 10ms 之外,並嘗詴實驗整理出 Delay 與 Jitter 之間的關聯性。當 dealy 增加時每一個 Jitter 參數所表現出圖形相似度會 有如何的呈現及影響,如表 3-6、表 3-7、表 3-8、表 3-9 和表 3-10 所示圓形加入 Delay 和 Jitter 所整理出來的相似度圖形表,其中分別對 Delay 0ms、50ms、100ms、 150m 和 200ms 參數值帶入實驗測詴,可發現當 Delay 增加時 Jitter 的圖形相似度 會受到影響。
表 3-6、Delay 0ms Jitter 0ms~10ms 圓形相似度比較表
Circle similarity 1 2 3 4 5 6 7 8 9 10 Avg
Delay 0ms Jitter 0ms 座標比數 1046 1054 1047 1041 1045 1045 1045 1062 1037 1050 1057 符合座標數 1040 1054 1047 1041 1043 1044 1042 1060 1036 1049 1047 相似度 (%) 99.43 100 100 100 99.81 99.90 99.71 99.81 100 99.90 99.05 Delay 0ms Jitter 2.5ms 座標比數 1068 1049 1039 1029 1048 1065 1045 1041 1049 1063 1050 符合座標數 1019 1010 975 992 1021 1061 1008 1026 1002 1036 1015 相似度 (%) 95.41 96.28 93.84 96.40 97.42 99.62 96.46 98.56 95.52 97.46 96.67 Delay 0ms Jitter 5ms 座標比數 1064 1044 1055 1036 1058 1044 1070 1058 1044 1067 1054 符合座標數 993 976 991 997 1003 970 1011 1003 999 1004 995 相似度 (%) 93.33 93.49 93.93 96.24 94.80 92.91 94.49 94.80 95.69 94.10 94.37 Delay 0ms Jitter 7.5ms 座標比數 1050 1044 1038 1053 1062 1054 1040 1035 1072 1054 1050 符合座標數 986 1002 975 997 1018 985 978 948 1027 985 990 相似度 (%) 93.90 95.98 93.93 94.68 95.86 93.45 94.04 91.59 95.80 93.45 94.28 Delay 0ms Jitter 10ms 座標比數 1069 1025 1034 1026 1042 1066 1005 1077 1046 1037 1043 符合座標數 900 922 888 865 922 910 861 879 892 920 896 相似度 (%) 84.19 89.95 85.88 84.31 88.48 85.37 85.67 81.62 85.28 88.72 85.92
表 3-7、Delay 50ms Jitter 0ms~10ms 圓形相似度比較表
Circle similarity 1 2 3 4 5 6 7 8 9 10 Avg
Delay 50ms Jitter 0ms 座標比數 1038 1037 1039 1043 1051 1054 1048 1038 1033 1037 1042 符合座標數 1038 1023 1039 1037 1032 1051 1027 1024 1030 1031 1033 相似度 (%) 100 98.65 100 99.42 98.19 99.72 98.00 98.65 99.71 99.42 99.17 Delay 50ms Jitter 2.5ms 座標比數 1039 1016 1047 1048 1046 1070 1025 1056 1053 1043 1044 符合座標數 986 1016 1019 1032 1025 1070 987 1055 998 1034 1022 相似度 (%) 100 100 97.33 98.47 97.99 100 96.29 99.91 94.78 99.14 97.88 Delay 50ms Jitter 5ms 座標比數 1065 1040 1047 1052 1052 1057 1067 1053 1053 1045 1053 符合座標數 923 861 856 842 893 888 866 865 865 907 877 相似度 (%) 86.67 82.79 81.76 80.04 84.89 84.01 81.16 82.15 82.15 86.79 83.24 Delay 50ms Jitter 7.5ms 座標比數 1052 1037 1068 1026 1059 1037 1040 1049 1021 1024 1041 符合座標數 836 846 880 873 867 905 867 792 852 890 861 相似度 (%) 79.47 81.58 82.40 85.09 81.87 87.27 83.37 75.50 83.45 86.91 82.67 Delay 50ms Jitter 10ms 座標比數 1055 1030 1020 1040 1055 1081 1081 1059 1017 1059 1050 符合座標數 799 730 800 677 773 833 834 769 645 770 763 相似度 (%) 75.73 70.87 78.43 65.10 73.27 77.06 77.15 72.62 63.42 72.71 72.69 表 3-8、Delay 100ms Jitter 0ms~10ms 圓形相似度比較表
Circle similarity 1 2 3 4 5 6 7 8 9 10 Avg Delay 100ms Jitter 0ms 座標比數 1037 1048 1040 1049 1045 1046 1052 1043 1042 1047 1045 符合座標數 1026 1038 1020 1042 1040 1046 1038 1012 1023 1047 1033 相似度 (%) 98.94 99.05 98.08 99.33 99.52 100 98.67 97.03 98.18 100 98.85 Delay100ms Jitter 2.5ms 座標比數 1062 1055 1065 1058 1068 1056 1072 1071 1065 1071 1064 符合座標數 1024 987 1009 1038 1053 998 1003 1003 1027 1070 1021 相似度 (%) 96.42 93.55 94.74 98.11 98.60 94.51 93.56 93.65 96.43 99.91 95.95 Delay 100ms 座標比數 1073 1038 1056 1060 1045 1027 1047 1045 1044 1030 1047
Jitter 7.5ms 符合座標數 682 622 781 729 623 778 720 686 773 828 722 相似度 (%) 65.58 61.28 74.67 68.13 61.20 73.67 67.73 65.46 73.55 77.75 68.96 Delay 100ms Jitter 10ms 座標比數 1050 1034 1066 1053 1075 1051 1045 1068 1079 1040 1056 符合座標數 604 558 629 623 635 576 556 628 642 615 607 相似度 (%) 57.52 53.97 59.01 59.16 59.07 54.80 53.21 58.80 59.50 59.13 57.44 表 3-9、Delay 150ms Jitter 0ms~10ms 圓形相似度比較表
Circle similarity 1 2 3 4 5 6 7 8 9 10 Avg
Delay 150ms Jitter 0ms 座標比數 1056 1056 1055 1047 1055 1048 1053 1059 1055 1053 1054 符合座標數 1055 1027 1033 1047 1034 1029 1026 1044 1055 1050 1040 相似度 (%) 99.91 97.25 97.91 100 98.01 98.19 97.44 98.58 100 99.72 98.70 Delay 150ms Jitter 2.5ms 座標比數 1054 1040 1050 1039 1040 1053 1037 1060 1055 1055 1048 符合座標數 960 980 978 931 922 968 967 978 990 936 961 相似度 (%) 91.08 94.23 93.14 89.61 88.65 91.93 93.25 92.26 93.84 88.72 91.67 Delay 150ms Jitter 5ms 座標比數 1066 1058 1028 1067 1060 1050 1029 1058 1070 1054 1054 符合座標數 657 726 699 696 732 725 715 735 734 671 709 相似度 (%) 61.63 68.62 68.00 65.23 69.06 69.05 69.48 69.47 68.60 63.66 67.27 Delay 150ms Jitter 7.5ms 座標比數 1045 1063 1009 1031 1047 1053 1033 1048 1013 1031 1037 符合座標數 647 679 640 686 708 709 630 678 626 693 670 相似度 (%) 61.91 63.88 63.43 66.54 67.62 67.33 60.99 64.69 61.80 67.22 64.55 Delay 150ms Jitter 10ms 座標比數 1061 1044 1047 1052 1074 1037 1063 1045 1050 1033 1051 符合座標數 633 630 583 528 560 577 580 580 627 581 588 相似度 (%) 59.66 60.34 55.68 50.19 52.14 55.64 54.56 55.50 59.71 56.24 55.96
表 3-10、Delay 200ms Jitter 0ms~10ms 圓形相似度比較表
Circle similarity 1 2 3 4 5 6 7 8 9 10 Avg
Delay 200ms Jitter 0ms 座標比數 1058 1055 1061 1056 1055 1056 1064 1059 1055 1051 1057 符合座標數 1035 1047 1054 1056 1051 1035 1034 1053 1055 1050 1047 相似度 (%) 97.83 99.24 99.34 100 99.62 98.01 97.18 99.43 100 99.90 99.05 Delay 200ms Jitter 2.5ms 座標比數 1041 1038 1047 1050 1049 1045 1044 1049 1042 1050 1046 符合座標數 790 766 732 758 813 729 751 749 810 758 766 相似度 (%) 75.89 73.80 69.91 72.19 77.50 69.76 71.93 71.40 77.74 72.19 73.23 Delay 200ms Jitter 5ms 座標比數 1003 1043 1037 1045 1044 1061 1039 1045 1034 1054 1041 符合座標數 584 637 646 651 662 603 563 630 597 623 620 相似度 (%) 58.23 61.07 62.30 62.30 63.41 56.83 54.19 60.29 57.74 59.11 59.55 Delay 200ms Jitter 7.5ms 座標比數 1066 1033 1056 1045 1072 1050 1044 1052 1059 1065 1054 符合座標數 563 571 532 608 562 598 598 586 570 580 577 相似度 (%) 52.81 55.28 50.38 58.18 52.43 56.95 57.28 55.70 53.82 54.46 54.71 Delay 200ms Jitter 10ms 座標比數 1065 1060 1033 1056 1041 1064 1053 1072 1060 1044 1055 符合座標數 541 562 524 521 549 548 549 549 512 529 538 相似度 (%) 50.80 53.02 50.73 49.34 52.74 51.50 52.14 51.21 48.30 50.67 51.04 從曲線圖 30、圖 31、圖 32、圖 33 及圖 34 觀察出 Haptic devicec 在繪圖時回 因 Delay 的增加而造成相似度降低,圖 35 則呈現了圓形不同的 Delay 參數下的每 一個 Jitter 參數平均相似度曲線。
圖 30、當 Delay 0ms 時各 Jitter 參數受影響之相似度曲線 圖 31、當 Delay 50ms 時各 Jitter 參數受影響之相似度曲線 0 20 40 60 80 100 1 2 3 4 5 6 7 8 9 10 Ci rc le si m ilar ity(% ) Number of experiments
![圖 4、遠端控制系統配置[6]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7437238.108661/23.892.111.787.125.826/圖4遠端控制系統配置6.webp)
![表 2-2、DHVE Haptic traffic versus other service types network parameters summary [3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7437238.108661/25.892.95.797.229.997/dhve-haptic-traffic-versus-service-network-parameters-summary.webp)