逢 甲 大 學
資 訊 工 程 學 系 專 題 報 告
遠端家電控制與智慧型保全系統
學
生 : 歐 陽 妤 旻(四丙)
施 閔 馨 (四丁)
指
導
教
授 : 竇 其 仁
老師
中華民國九十一年十二月
目 錄
圖表目錄 ... Ⅳ 摘要 ... Ⅵ 第一章 緒論 ... 1 1.1 動機 ... 1 1.2 目的 ... 1 1.3 系統簡介 ... 2 1.3.1 主要功能 ... 2 1.3.2 系統特色 ... 3 第二章 背景 ... 4 2.1 Adam ... 7 2.1.1 Adam 簡介 ... 4 2.1.1.1 監護定時器管理 ... 4 2.1.1.2 電源需求 ... 4 2.1.1.3 連結與程式化 ... 4 2.1.1.4 RS-485 網路... 5 2.1.2 Adam 4522 ... 5 2.1.3 Adam 4050 ... 6 2.2 網路攝影機 ... 72.2.1 AXIS 2100 Network Camera簡介 ... 7
2.2.2 支援的環境 ... 8
2.2.3 操作的方法 ... 8
2.2.4 功能與優點 ... 8
2.3 RS-232 ... 11
2.3.1 RS-232 基本原理 ... 12
2.4 Solid State Relay,SSR ... 14
第三章 系統架構 ... 15
3.1 軟體架構 ... 15
3.1.1 資訊家電 ... 16
3.1.1.1 遙控家電 ... 16
3.1.2 數位監控 ... 17 3.1.2.1 數位監控流程圖 ... 18 3.1.2.2 訓練環境參數 ... 18 3.1.2.3 自動追蹤目標 ... 20 3.1.2.4 分析物體行為 ... 22 3.1.2.5 警報裝置 ... 24 3.1.2.6 數位錄影 ... 24 3.2 硬體架構 ... 25 3.2.1 硬體控制結構圖 ... 26 第四章 系統實作 ... 27 4.1 平台 ... 27 4.2 分工情形 ... 27 4.3 程式規劃 ... 28 4.3.1 使用的軟體元件 ... 28 4.3.1.1 MSCommm 元件屬性說明 ... 28 4.3.1.2 使用MSCommm 元件通訊步驟 ... 29 4.3.1.3 WinSock 控制單元屬性說明 ... 29 4.3.1.4 MAPI的控制說明 ... 32 4.4 Adam 控制指令 ... 33 第五章 系統使用說明 ... 35 5.1 系統安裝說明 ... 35 5.1.1 硬體安裝 ... 35 5.1.2 啟動電源控制器 ... 36 5.1.3 軟體安裝 ... 36 5.1.4
啟動系統
... 37 5.2 系統操作說明 ... 38 5.2.1 主工具列 ... 39 5.2.2 系統操作模式 ... 40 5.2.2.1 Server 操作模式 ... 40 5.2.2.2 Client 操作模式 ... 41 5.2.3 電器控制 ... 42 5.2.3.1 新增控制電器 ... 42 5.2.3.2 使用電器控制面板 ... 435.2.4 虛擬感應開關功能 ... 45 5.2.4.1 新增虛擬感應開關 ... 45 5.2.4.2 使用虛擬感應開關控制面板 ... 46 5.2.4.3 設定虛擬感應開關的控制物件 ... 47 5.2.5 錄影管理功能 ... 48 5.2.5.1 使用錄影管理面板 ... 48 5.2.6 智慧型保全系統說明 ... 49 5.2.6.1 保全控制面板 ... 49 5.2.6.2 警報設定 ... 50 5.2.6.3 分析輸入影像 ... 50 5.2.7 定時功能 ... 51 5.2.7.1 新增定時控制物件 ... 52 5.2.7.2 使用定時控制面板 ... 52 5.2.7.3 時間軸與工作佇列 ... 53 5.2.7.4 新增物件啟動時段 ... 53 5.2.8 登錄使用者管理 ... 54 5.2.8.1 新增登入使用者 ... 54 5.2.8.2 修改登入使用者資料 ... 55 5.2.8.3 刪除登入使用者 ... 55 5.2.8.4 限制來源IP ... 56 第六章 結論 ... 57 6.1 遭遇困難與解決之道 ... 57 6.2 心得 ... 58 6.3 系統未來發展 ... 59 參考資料與文獻 ... 60 附錄 A... 61 B... 63
圖 表 目 錄
圖2-1. Adam 4522... 5
圖2-2. Adam 4050... 6
圖2-3. 網路攝影機... 14
圖2-4.Solid State Relay (SSR)... 14
圖3-1. 軟體架構圖... 15 圖3-2. 以手部揮動的感應方式來改變電器的狀態... 17 圖3-3. 直接在電器前以手部揮動改變該電器的狀態... 17 圖3-4. 保全系統流程圖... 18 圖3-5. 第10張訓練背景時燈未開啟... 19 圖3-6. 第50張訓練背景時燈開啟... 19 圖3-7. 使用燈開啟時影響到附近的光影... 19 圖3-8. 遮蔽物體其掃描出的像素會聚集,而雜訊則分佈較鬆散.... 20 圖3-9. 輸入連續影像... 21 圖3-10. 追蹤遮蔽物體所在位置... 21 圖3-11. 訓練出的環境參數... 22 圖3-12. 偵測到遮蔽物體... 22 圖3-13. 追蹤移動物體... 22 圖3-14. 關節物體移動的連續畫面... 23 圖3-15. 遮蔽物X軸統計曲線的凹陷點 ... 24 圖3-16. 凹陷點數量的統計圖... 24 圖3-17. 硬體架構圖... 25 圖3-18. 硬體控制圖... 26 圖5-1. 硬體安裝說明圖... 35 圖5-2. 電源控制器上方的插座編號... 36 圖5-3. 電源控制器開關的位置... 36 圖5-4. 系統安裝畫面... 36 圖5-5. 啟動遠端家電控制與智慧型保全系統... 37 圖5-6. 操作畫面... 38 圖5-7. 簡易操作功能畫面... 39 圖5-8. 連線視窗... 41 圖5-9. 使用滑鼠拖曳選取電器於攝影畫面... 42 圖5-10. 新增物件視窗... 43
圖5-11. 插座重複使用警告視窗... 43 圖5-12. 電器控制面板... 44 圖5-13. 直接從攝影畫面中改變電器狀態... 44 圖5-14. 游標移至電器上,電器周圍浮現成按鈕... 44 圖5-15. 直接按下電器按鈕即改變電器的狀態... 44 圖5-16. 以手部揮動的感應方式來改變電器的狀態... 45 圖5-17. 虛擬感應開關控制面板... 46 圖5-18. 直接在電器前以手部揮動改變該電器的狀態... 46 圖5-19. 虛擬感應開關設定視窗... 47 圖5-20. 虛擬感應開關設定視窗... 47 圖5-21. 錄影管理面板... 49 圖5-22. 保全系統監控中... 50 圖5-23. 保全系統發現竊賊... 50 圖5-24. 保全系統關閉中... 50 圖5-25. 保全系統啟動時所偵測的屋內環境... 51 圖5-26. 人進入屋內時被系統偵測並加以追蹤... 51 圖5-27. 警報裝置設定視窗... 51 圖5-28. 定時控制面板... 52 圖5-29. 使用者管理介面... 55 圖5-30. 新增使用者的對話視窗... 55 圖5-31. 新增限制來源IP規則 ... 56
表2-1. AXIS Network Camera 與 Web Camera 之比較 ... 7
表2-2.Network Camera 所提供的格式 ... 8
表2-3.RS-232 的腳位定義 ... 12
表2-4.RS-232 9針與25針的對應 ... 13
第一章 緒論
1.1 動機
近年來隨著資訊家電的風行,許多家用電器透過專用的晶片及系 統為我們的生活帶來更多便利,人們可以在任何時候,任何地方控制 家中的電器,使得回到家前屋內的環境已張羅好。但是這些推出的資 訊家電產品都集中在高檔位的家電如冰箱、冷氣機,其他簡單卻佔有 生活中更重要地位的家電如電燈、電鍋、電扇等,可能因成本或尺寸 問題而無法加裝晶片及系統,使得這些家電無法透過此一機制加入資 訊家電的行列。 另外,近年來隨著社會治安的敗壞,竊盜率日益增高,即使大樓 本身有管理員也很難保障家中的安全。目前現有的住家保全系統尚透 過感測器的啟動來通知保全公司的管制中心,保全人員才會透過管制 中心的指示前往住家。一般保全系統也不會在住家裝置監視系統,使 得無法掌握第一時間與現場錄下行竊過程,有效達到犯罪率的降低與 財產損失。綜合上面所述我們開發出遠端家電控制與智慧型保全系統。1.2 目的
遠端家電控制與智慧型保全系統結合了 Network Camera 和 Adam 控制模組,透過網路連線提供使用者在遠端控制屋內的電器裝置,並 藉由 Network Camera 所傳送的即時影像觀看家中電器的啟動情形。另 外,系統中還包含了錄影功能和保全系統,屋主外出時保全系統可對 屋內作即時監控,當偵測可疑物體時會自動追蹤與分析,若系統判斷 出偵測物體為竊賊時,會自動啟動錄影功能,並對屋主的行動電話發 出手機簡訊,顯示屋內遭入侵的警告訊息。系統中並包含了定時功能, 提供使用者在指定時段啟動指定的物件,如家電、錄影功能或保全功 能。 本系統包含了 server 和 client 兩種操作模式分別使用於家電端及遠 端,兩種操作模式皆可設定並執行上述功能,其中在 server 模式下系 統提供了一個虛擬感應開關的功能,主要是提供使用者在屋內的特定 區域以手部揮動的感應方式來改變單一或多項物件的狀態,如電器、 錄影功能或保全功能。
1.3 系統簡介
1.3.1 主要功能
遠端家電控制:本功能主要是提供使用者不在家中時也可以透過 網路來控制屋內的電器,只要預先在家中將電器安裝在硬體控制裝置 上,並透過 Network Camera 傳送屋內影像,位於遠端的使用者便能 透過軟體接收影像並可直接在畫面上點取欲控制的家電來改變該它的 狀態。所有在家電端與遠端之間的資料傳送皆以對稱式的編碼方式來 確保系統的安全性。在家電端的 server 模式中可以管理所有登錄使用 者的帳號、密碼、連線的來源 IP 及控制權限。 智慧型保全系統:外出時,使用者可利用保全功能對屋內作有效 的監控。系統啟動時會自動調整與設定保全裝置,使用者不需作任何 設定即可有效地偵測出所有可疑物體並加以分析與追蹤。當氣候或天 色改變時,即使外在環境透過窗戶對屋內影像產生變化,系統也會自 動調整設定,不會影響到系統的正常運作。當系統判斷出偵測到的可 疑物體為竊賊時,會自動啟動錄影功能,將整個行竊過程記錄在家電 端與遠端的電腦中,並同時對屋主的行動電話發出手機簡訊,顯示屋 內遭入侵的警告訊息。 定時啟動功能:系統中並包含了定時功能,提供使用者在指定時 段啟動指定的物件,如家電、錄影功能或保全功能。例如您可以在下 班前啟動家中的電鍋,到家前關閉保全系統以避免自己觸發警報,甚 至在特定時段啟動系統的錄影裝置記錄保姆育兒狀況。 錄影管理功能:此功能主要是可以自動儲存與管理系統中錄影功 能所錄的影片,其中可分為手動錄影、保全錄影和定時錄影,使用者 可自行設定影片的儲存品質,系統除了會自動儲存影片並提供完整的 播放功能,讓使用者可以很方便地檢視所有記錄的影片。 虛擬感應開關:虛擬感應開關主要是提供使用者在屋內的特定區虛擬感應開關,並使用虛擬感應開關功能中的設定功能來編輯欲啟動 的物件,完成之後使用者可在屋內所設定的區域中以手部來回揮動一 次改變連結物件的狀態。另外,虛擬感應開關可以直接設在電器物件 上,使用者可以直接在電器前以手部來回揮動一次改變該電器的狀態。
1.3.2 系統特色
1. 採用數位錄影方式,可與現有的壓縮技術整合。 2. 監控屋內、室外、公司等場所,自動發送警示訊息至手機。 3. 自動擷取移動物體並透過 machine learning 方式分判斷物體行為。 4. 定時啟動錄影或監控系統。 5. 透過網路可即時觀看屋內影像。 6. 自動控制常用電器設備電源,如電燈、電鍋、除濕機。 7. 透過定時功能可設定各項電器之啟動與關閉時間。 8. 整合影像處理技術,可在屋內設置虛擬感應開關。 9. 智慧型操控系統,透過簡易肢體動作控制電器。 10. 可透過網路遠端遙控家中電器。 11. 直接將現有電器,升級資訊家電。第二章 背景
遠端家電控制與智慧型保全系統需要擁有許多相關的背景知識, 經過融會整合之後才能完成。在本章將介紹系統所使用到的硬體裝 置,包括 Adam 控制模組、網路攝影機、RS-232 以及固體繼電器。2.1 Adam
2.1.1 Adam 簡介
Adam 系列產品為研華科技股份有限公司所生產之產品,是一內 建微處理器之智慧型電腦介面感應器模組,透過簡單的 ASCII 格式的 指令和 RS-485 的協定做到遠程的控制。Adam 提供信號判斷、A/D 和 D/A 轉換、資料比較、和數位通訊函式。有些模組提供繼電器和 TTL 裝置之數位輸出/輸入線。 Adam 模組沒有開關。使用者可以僅僅藉由從電腦傳出的指令來 改變一類比輸入信號去接受電壓、電偶或 RTD 輸入的幅度。遠程結構 可藉由使用以選單為主之軟體或指令型式來完成。 2.1.1.1 監護定時器管理 監護定時器管理的功能可自動地重置,假使 Adam 模組的系統失 敗。如此一來使維護作業被簡化。 2.1.1.2 電源需求 雖然模組被設計用來做為標準工業的非規格 24VDC 電源供應。 但其接受在+10 ~ +30 VDC 的供電範圍。 2.1.1.3 連結與程式化 Adam 模組能與所有的電腦和終端機連接和溝通。使用 RS-485模組能在任何高階語言中被程式化。
2.1.1.4 RS-485 網路
EIA RS-485 是工業上最被廣泛地用的雙向性傳輸線路標準。 RS-485 網路提供比較低干擾的感應器,即模組能被放置在比較靠近的 來源。至多 256 個 Adam 模組可被藉由使用 Adam RS-485 repeater 來連到 RS-485 網路上,擴充距離最大到 4000 呎,主電腦以 Serial Communication Port 經由 Adam RS-232/RS-485 轉換器連接到 RS-485 網路。 為提高網路的通訊量,Adam RS-485 repeater 使用邏輯的 RTS 信號管理 repeater 的方向。對 RS-485 網路傳輸只需要 2 條線路: DATA+和 DATA -。使用便宜的屏蔽式雙絞線。 2.1.2 Adam 4522 ADAM 4520/4522 轉換器可以讓使用者使用較大的傳輸速度、傳 輸範圍和能使現今具有 RS-232 介面的網路裝置。在 ADAM 4520/4522 內的電路系統自動地感應資料流的方向、在網路上的設備間交換信 號,且可省去網路中 handshaking 的要求,然後將 RS-485 網路的線 路需求數量減到只用 2 條。傳輸速度可達 115.2Kbps。 圖 2-1 Adam 4522
規格:
Automatic internal RS-485 bus supervision
No external flow control signals required for RS-485 3000 VDC isolation protection (ADAM-4520 only) Transient suppression on RS-485 data lines Speed up to 115.2 kbps
Networking up to 4000 feet
Reserved space for termination resistors
Power and data flow indicator for troubleshooting Power requirement: +10 to +30 VDC
Mounts easily on a DIN-rail or panel
2.1.3 Adam 4050
Adam 4050 具有 7 個數位輸入孔和 8 個數位輸出孔。電腦可使用 模組的數位輸入來決定狀況、遠端的數位信號;可透過繼電器 (Solid-state relay)來使用數位輸出控制各式電器設備。 圖 2-2 Adam 4050 規格: 1. Digital Input a. Channels: 7c. Digital Output
d. Channels: 8
i. Open collector to 30 V, 30 mA max. load e. Power dissipation: 300 mW
2. Watchdog Timer
a. Built-in
3. Power
a. Power Requirements: +10 ~ +30 VDC (non-regulated)
b. Power consumption: 0.4 W
2.2 網路攝影機
本系統採用 AXIS 2100 Network Camera 如圖 3 所示,來作即時 監控。
2.2.1 AXIS 2100 NetWork Camera 簡介
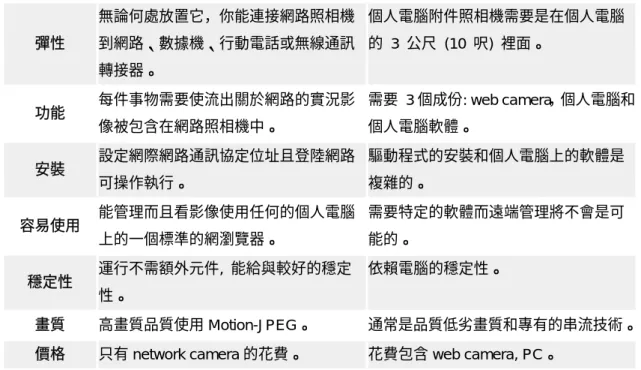
AXIS Network Camera 與一般 Web Camera 之比較
Axis Network Camera PC + Web Camera
彈性 無論何處放置它,你能連接網路照相機 到網路、數據機、行動電話或無線通訊 轉接器。 個人電腦附件照相機需要是在個人電腦 的 3 公尺 (10 呎) 裡面。 功能 每件事物需要使流出關於網路的實況影 像被包含在網路照相機中。 需要 3 個成份: web camera,個人電腦和 個人電腦軟體。 安裝 設定網際網路通訊協定位址且登陸網路 可操作執行。 驅動程式的安裝和個人電腦上的軟體是 複雜的。 容易使用 能管理而且看影像使用任何的個人電腦 上的一個標準的網瀏覽器。 需要特定的軟體而遠端管理將不會是可 能的。 穩定性 運行不需額外元件, 能給與較好的穩定 性。 依賴電腦的穩定性。 畫質 高畫質品質使用 Motion-JPEG。 通常是品質低劣畫質和專有的串流技術。 價格 只有 network camera 的花費。 花費包含 web camera, PC。
2.2.2 支援的環境
任何的標準瀏覽器可觀看 JPEG 格式影像都能被用.取得,轉移而 且看實況影像並且設定裝配是容易的,沒有額外的硬件或軟體被需要。2.2.3 操作的方法
AXIS2100 網路照相機是為一個單獨的照相機,與一內建的網頁 伺服器。你使用照相機的 URL 位址去擷取影像。而不需要個人電腦, 它有它自己的 IP 位址。一個快速攝影或影像串流被觸發來自瀏覽器的 請求即時攝影被 CAMERA 所擷取且被壓縮成 JPEG 格式並透過網路 傳回瀏覽器中。高達 10 張/秒的傳輸速度,這幾乎是依賴網路的傳輸 速度與 PC 的執行速度而定。 在此也提供三種影像位址可供使用: 檔名 畫素大小 影像更新率 一般檔案大小 最大影像更新率所 需頻寬 image320x240.jpg 320 x 240 10 8 K 0.7 MBit/s image640x480.jpg 640 x 480 5 32 K 1.3 MBit/s 表 2-2 Network Camera 所提供的格式2.2.4 功能與優點
直接連接照相機到網路 連接到網路是容易的,而且不需要任何其他的伺服器,例如有影像 擷取卡的電腦,複雜的影像轉換和網路組態.僅僅分配一個 IP 位址到網 路照相機而且增加一個網路參考。被整合的最佳化網頁伺服器
這個網路照相機被安裝為一個網頁伺服器。沒有個人電腦或額外 的硬件和軟體是需要的。開放式架構使它容易整合入其他的 WWW/ Intranet 應用程式如 CGI scripts。而上載 HTML 檔透過 FTP 亦是被允 許的。
高影像品質
Axis 2100 由於使用高階 CCD (Sony)因此非常敏感 (color down to 3 lux) 他是非常理想用來監視燈光來源不足的地點或房間。 廣範的應用 • 一般說來,應用在遠距家庭監控上 – 隨時觀看保母育兒狀況、家中 防盜、電器開關遠端控制等效益。 • WWW 網站目標以實況轉撥現場更新的影像,提高吸引更多人來瀏 覽的價值。 • 在舊有的系統當中,增加遠距監控的功能。 • 對於工廠的自動控制,建立數位監聽及在儲存事件在檔案伺服器上。 有效成本 直到今日,唯一將 camera 連上網路的方法只有電腦和網路攝影機 或是用影像擷取卡運轉特殊軟體的 UNIX 工作站。這些解決方法很難 去建立及管理,而且他們通常不可靠或十分昂貴。AXIS Network Cameras 提供了一個低價位的選擇以及包含了所有需要的特點。 效能
AXIS Network Cameras 使用了 ETRAX-100、一個 100 MIPS RISC CPU 和 ARTPEC-1 晶片來作 JPEG 轉換。ARTPEC-1 是首先由 Axis 發展出來網路攝影機特定的晶片,可以支援每秒 60 個壓縮的影 像。這是為了能達到高效能所需的基本條件。在一網路環境裡,所遇 到的瓶頸就是如何將網路程序,web 瀏覽器和影像大小結合在一起。 若是使用現代的 PC(300 MHz or 更高),就不會有瓶頸。但如果使用的 是一個慢速的數據機,則低速的通訊當然會是問題。傳送一張一般的 影像大概是在 3 秒左右,以此為界限。在緊急情況下速度可以利用 Axis 2100 network camera 的緩衝器特點來提昇。
攝影機規格
The AXIS 2100 內建了 CCD 型感應器,而非一般的 CMOS 影像 感應器,因為 CCD 提供了更好的影像品質。 • 鏡頭 – 可替換的曲線系統樣式(CS-type)鏡頭,能被指定到不同 的運用上。 • 1/4 英吋 Sony 先進的掃描 RGB 顯示器 CCD 型影像感應器 (640 x 480),以達到最高的影像品質。 • 4.0 毫米玻璃透鏡,與一般具有 2.0 孔鏡相機上的 35 毫米是相同 的。 • 最短曝光時間: 1/30000 秒, 最常曝光時間: 0.7 秒 • 高感度 – works down to 3 lux(類似燭光)
硬體描述
AXIS 2100 構造:
• UTP (10/100BaseT)乙太網路連結至網路附上 100 or 10 MBit 網 路速度。
• 電源連結器(12 V AC or DC, 9.6 VA), Axis PS-D • 一個連結數據機 9 pin serial DSUB 支援一般數據機。 • 一個隱藏在前面的 push-key 可以調整焦距及其他地方。 • 具中繼和輸入的輔助連結口可觸發/控制外部的設備。
• 彩色影像的感度至 3 lux – 減少的框架速度和更長的曝光時間, 如下:
Lux: 2, Maximum images/second:1.3 Lux: 3, Maximum images/second:2 Lux: 4, Maximum images/second:3 Lux: 6, Maximum images/second:10
極速 JPEG 壓縮
AXIS 2100 使用內建的 ARTPEC-1 晶片支援 JPEG 的壓縮,每 秒傳送出 10 frames 在此產品裡。它有 ETRAX-100 處理器傳送 100 MIPS 未加工的動作,像是駕馭在 10/100 Mbit 網路速度上.AXIS 2100 可以直接地收到流動傳輸進來的影像,不需要在照片格式間手動轉 換。每秒可以產生 10 frames。 ARTPEC and ETRAX 晶片則是 Axis 已發展了的晶片。
安全性
AXIS 2100 本身是一個網路伺服器。這意味著他就像其他的網路 主機一樣的安全。它由網路管理者決定存取的限制,所以任何個人、 團體、整個公司或整個世界都可以存取 AXIS Network Cameras 伺服 器。理所當然,這應該由公司的防火牆去完成。此配置儲存在產品的 配置檔案裡,可以透過網路的介面去使用,例如 FTP。配置檔案需要 root 的存取權限及產品的密碼才可以被修改。 管理 因為網路伺服器的性質,可以透過世界上任何網路瀏覽器來管理 這影像伺服器,假若防火牆允許此產品是公開的。Axis 影像伺服器內 的軟體可以自它支援的網頁免費索取。此 camera server 具有 FLASH memory 允許主要的和遠距的透過網路來更新。
2.3 RS-232
串列通訊埠(Serial Communication Port)在系統控制的範疇中一 直佔有極重要的角色,不僅沒有因為時代的進步而被淘汰,反而是規 格上愈來愈向其極限挑戰。現在,電腦上的串列通訊埠(RS-232)是標 準配備,用途上則以連接數據機作通訊傳輸最為常見。
RS-232 的通訊埠是每部電腦上的必要配備,通常含有 COM1 與 COM2 兩個通道,一般的電腦將 Com1 以 9pin 的接頭接出,而以 25pin 的接頭將 COM2 接出。新一代的電腦均以 9pin 的接頭接出所有的 RS-232 的通訊埠。在電腦上的 RS-232 均是公頭,即使是 25pin 也是
公頭。通常與電腦連接的設備,最簡單的介面就是 RS-232,不僅實作 簡單,而且價格上也便宜很多。
2.3.1 RS-232 基本原理
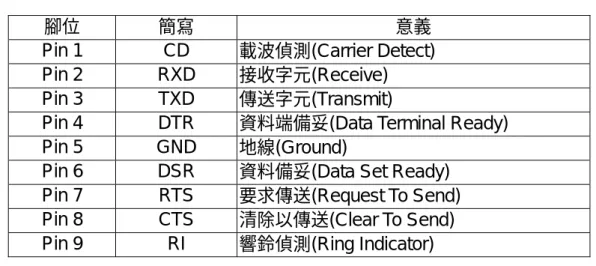
腳位方向與意義 串列通訊的方式可以分為同步式(Synchronous)及非同步式 (Asynchronous)兩種。同步式在通訊的兩端使用同步訊號作為通訊的 依據,而非同步式則使用非同步傳輸則需使用到 25 支腳。 由一另個角度來看,如果傳送的一方無法以一定的時間間隔傳送 資料,接收方就不可能準確地接收每個字元,因此傳送方必須加上起 終止位元,這就是非同步,而若傳送方的傳送速率是固定的,則為同 步。 電腦上的 RS-232,其 9 支腳位的定義如表下。 腳位 簡寫 意義Pin 1 CD 載波偵測(Carrier Detect) Pin 2 RXD 接收字元(Receive) Pin 3 TXD 傳送字元(Transmit)
Pin 4 DTR 資料端備妥(Data Terminal Ready) Pin 5 GND 地線(Ground)
Pin 6 DSR 資料備妥(Data Set Ready) Pin 7 RTS 要求傳送(Request To Send) Pin 8 CTS 清除以傳送(Clear To Send) Pin 9 RI 響鈴偵測(Ring Indicator)
表 2-3 RS-232 的腳位定義
部份裝置用到的是 RS-232 是 25 針的排列,而其與 9 針 RS-232 之對應下表所示。
9 針 RS-232 25 針 RS-232 1:CD 8:CD 2:RXD 8:RXD 3:TXD 2:TXD 4:DTR 20:DTR 5:GND 7:GND 6:DSR 6:DSR 7:RTS 4:RTS 8:CTS 5:CTS 9:RI 22:RI 表 2-4 RS-232 9 針與 25 針的對應 (1) CD: 此腳位是由數據機控制,當電話接通之後,傳送的訊號是載在載 波訊號上面,數據機利用此腳位通知電腦有載波被偵測到,而當載波 被偵測到時才可保證此時是處於連線的狀態。一般若電腦未收到此信 號,均會回應訊息,並將 Modem 掛線。 (2) RXD: 此腳位會將遠端所傳送過來的資料接收進來,在接收的過程中, 由於資料是以數位型式傳送,可以在 Modem 的 RXD 燈號上看到明滅 交錯,此即為 0、1 交替所產生的現象,也就是電位高低所產生的現象。 (3) TXD: 此腳位將電腦所欲傳送出去的資料傳送出去,在傳送的過程中, 由於資料是以數位型式傳送,可以在 Modem 的 TXD 燈號上看到明滅 交錯,此即為 0、1 交替所產生的現象,也就是電位高低所產生的現象。 (4) DTR: 此腳位由電腦控制,用以通知 Modem 可以進行傳輸。高電位時 表示電腦已經準備就緒,隨時可收資料。 (5) GND: 此腳位為地線,作為電腦與 Modem 之間的準位參考。兩端設備 的地線準位必須一樣,否則會產生地迴路(Groud Loop),使得訊號因準 位的不同而產生偏移,也會導致結果失常。 (6) DSR: 此腳位由 Modem 控制,Modem 用這支腳位的高電位通知電腦一 切均準備就緒,可以傳送資料過來。
(7) RTS: 此腳位電腦控制,用以通知 Modem 馬上傳送資料至電腦,而當 Modem 收到此信號後,便會將它由電話線上收到的資料傳送給電腦。 (8) CTS: 此腳位由 Modem 控制,用以通知電腦將欲傳送的資料送至 Modem。當電腦收到此腳位之訊號,即將準備送出之資料至 Modem。 (9) RI: Modem 通知電腦有電話進來,是否接聽則由電腦決定。如果電腦 設定 Modem 為自動應答模式,則 Modem 在聽到一定的鈴響後即會自 動接聽電話。
2.4 Solid State Relay , SSR
固體繼電器(Solid State Relay)如圖 4 所示,具有開關速度快、靈敏 度高、接點電流大、體積小、無接點火花等優點,正逐步廣泛地應用 在各方面。固體繼電器包含以下四點特性: 1. 輸入觸發電壓由 3 至 32VDC。 2. 輸入與輸出開關之間用光電耦合隔離,安全可靠。 3. 輸出負載最大電流為 10A (80 至 280VAC)。 4. 輸出有防振蕩保護電路。
圖 2-4. Solid State Relay 圖 2-3. 網路攝影機
第三章 系統架構
3.1 軟體架構
本系統結合了資訊家電與數位監控系統並透過網際網路達到遠 端遙控家電以及自動化的監控保全。系統架構如圖 3-1 所示可分成資 訊家電和數位監控兩個部分,並透過網際網路加以整合應用。 網際網路整合應用 1. 遠端遙控家電 2. 遠端啟動錄影功能 3. 遠端設定定時裝置 4. 即時傳送屋內影像 5. 遠端即時監控 6. 傳送警報訊息 數位監控 1. 訓練環境參數 2. 自動追蹤目標 3. 分析物體行為 4. 警報裝置 5. 數位錄影 6. 定時啟動保全系統 7. 即時觀看屋內狀態 資訊家電 1.遙控電器 2.肢體動作控制電器 3.定時啟動電器 4.即時觀看屋內電器 啟動狀態 圖 3-1 . 軟體架構圖3.1.1 資訊家電
配合硬體裝置,讓使用者可在遠端控制屋內電器,或是透過定時 裝置,讓電器在指定的時間內啟動,此外使用者在屋內也可透過簡單 的肢體動作來控制電器。 3.1.1.1 遙控家電 提供使用者不在家中時可以透過網路來控制屋內的電器,只要預 先在家中將電器安裝在硬體控制裝置上,並透過 Network Camera 傳 送屋內影像,位於遠端的使用者便能透過軟體接收影像並可直接在畫 面上點取欲控制的家電來改變該它的狀態。 3.1.1.2 肢體動作控制電器 因為有使用肢體動作來控制家電的構想,我們賦予它一個名詞為 虛擬感應開關,其主要是提供使用者在屋內的特定區域以手部揮動的 感應方式來改變單一或多項物件的狀態,包含電器、錄影裝置或保全 裝置。當使用者以手部來回揮動一次設定的感應區域,改變該區域所 連結之物件的狀態如圖 3-2 所示。使用者可將電器同時設成虛擬感應 開關物件,此時該電器物件會新增至虛擬感應開關控制面板上,因此 該虛擬感應開關所感應的區域即該電器在影像上的區域。使用者可以 直接在電器前以手部揮動改變該電器的狀態如圖 3-3 所示。 根據將在 3.1.2.2 節詳細提到的影像分割技巧,當系統建立好環境 參數後,便會掃描使用者所設定的感應區域。當使用者以手部揮動於 感應區域時,系統會自動偵測到感應區域中的手部,同時分析使用者 手部動作。若手部是由下往上揮動,接著再由上往下揮動便完成感應 所需要的動作。為了避免其他動作不小心啟動虛擬感應開關,因此使 用者必須在 3 秒內完成感應動作,否則系統不會啟動感應開關。圖 3-2. 以手部揮動的感應方式來改變電器的狀態 圖 3-3. 直接在電器前以手部揮動改變該電器的狀態 3.1.1.3 定時啟動功能 提供使用者在指定時段啟動指定的物件,如家電、錄影功能或保 全功能。例如您可以在下班前啟動家中的電鍋,到家前關閉保全系統 以避免自己觸發警報,甚至在特定時段啟動系統的錄影裝置記錄保姆 育兒狀況。
3.1.2 數位監控
配合攝影機可及時監控屋內狀態,當屋內出現可疑物體時,系統 會自動追蹤物體並分析物體行為,若判斷出偵測的可疑物體為竊賊 時,會自動啟動錄影功能,並同時對屋內的行動電話發出手機簡訊, 顯示屋內遭入侵的訊息。另外,使用者在遠端也可透過攝影機觀看屋 內狀態。3.1.2.1 數位監控流程圖 掃描讀入影像 否 否 是 啟動警報 建立新背景 判斷偵測物是否 移動或關節物體 記錄偵測到的物體 第一次出現的位置 是 判斷是否偵測到物體 圖 3-4. 保全系統流程圖 3.1.2.2 訓練環境參數 傳統在作影像分割時,首先必須先取得固定的背景資訊並加入臨 界值(Threshold),接下來再和輸入的影像加以比較,取出相異的像素 即分割出原本不屬於背景的影像。然而,一般以 threshold 來分割影像 的方法比較適用單純的背景如封閉的室內;在變化較大的背景如室 外,便無法有效地分割出影像,且即使在室內也可能因天色或氣候等 外在環境透過窗戶對室內的光影產生變化。因此若只取單張背景加上
本系統則使用多張背景訓練出環境參數,分析每個取樣的像素其 顏色變化範圍。其主要方法是每隔 10 msec 輸入一張背景,並取樣記 錄該張背景中的像素,當輸入完 100 張背景後,統計出所取樣的像素 其變化的上下限,便是最後所自動訓練出來的環境參數。因此不需要 設定任何 threshold 便可有效地分割出影像。 假設目前正在訓練環境參數,圖 3-5 表示第 10 張背景,圖 3-6 表 示第 50 張背景,背景下方則是環境參數的變化範圍。當訓練到第 50 張背景時電燈亮起(圓框所在位置),其背景下方所顯示的環境參數變化 範圍在電燈四周的區域會明顯增加。因此訓練出來的環境參數無論在 開燈或在關燈的環境下還是可以正確的追蹤遮蔽物體。若使用傳統只 取單張背景的 方法,則當電燈亮起,電燈四周的區域會被當作是遮蔽 物體,如圖 3-7 所示。 圖 3-5. 第 10 張訓練背景時燈未開啟 圖 3-6. 第 50 張訓練背景時燈開啟 圖 3-7. 使用燈開啟時影響到附近的光影
3.1.2.3 自動追蹤目標 透過上一節所描述的動態背景可將原本不屬於背景的影像分割出 來,但是若有正常像素被誤當作不正常像素則稱之為雜訊,其造成的 可能原因為攝影機本身因素或其他的外在因素。 傳統清除雜訊的方法為檢查所有與背景相異的取樣像素,由於遮 蔽物體其掃描出的像素有聚集的特性,而雜訊則分佈較鬆散。因此檢 查與背景相異之取樣像素的周圍若無其他相異的取樣像素鄰近,則可 以把它當作是雜訊清除,如圖 3-8 所示。 圖 3-8.遮蔽物體其掃描出的像素會聚集,而雜訊則分佈較鬆散 然而,傳統方法並不保證所有的雜訊可以完全清除,若重覆作清 除雜訊於同一張影像,雖然最後可以把所有的雜訊清除,但相對花費 的計算量會增加。因此,本系統提出新的追蹤方法,即使雜訊多時也 可以有效地追蹤出不屬於背景中的物體,其方法步驟如下: 步驟 1. 由讀入的影像統計出 X 軸上與背景相異之取樣像素的數量, 如圖 3-10 所示,其中白點為相異的取樣像素,而圖示上方則 為統計出的曲線。
步驟 3. 由 X0開始向右遞增,當統計值為零時停止,此時所在位置為 Xmax。 步驟 4. 由 X0開始向左遞減,當統計值為零時停止,此時所在位置為 Xmin。 步驟 5. 由統計出的曲線中找出最高點的位置,如圖 3-10 中 Y0,所標 示的位置。 步驟 6. 由 Y0開始往上遞增,當統計值為零時停止,此時所在位置為 Ymax。 步驟 7. 由 Y0開始往下遞減,當統計值為零時停止,此時所在位置為 Ymin。
步驟 8. 當找出 Xmin、Xmax、Ymin、Ymax四個值時,則圍繞出的區域為
追蹤出的目標。 圖 3-9. 輸入連續影像 Xmin Xmax X0 Y0 Ymax Ymin 圖 3-10. 追蹤遮蔽物體所在位置
3.1.2.4 分析物體行為 當偵測到遮蔽物體時,系統必須判斷偵測到的物體是竊賊或是單 純的天色變化改變室內光影。因此系統會分析追蹤的遮蔽物體是否會 移動,以及該遮蔽物是否為關節物體兩種分析方法來辨識追蹤的物體。 1. 分析追蹤的遮蔽物體是否會移動可分成下列幾個步驟: 步驟 1. 訓練環境參數如圖 3-11 所示。 步驟 2. 偵測到遮蔽物體時,紀錄物體出現的位置如圖 3-12 所示。 步驟 3. 由輸入影像追蹤物體的位置,並檢查是否與前一張輸入影 像的位置重疊,若沒有重疊則回到步驟 2。 步驟 4. 若追蹤物體的位置沒有和第一次出現的位置重疊,表示追 蹤的物體已移動如圖 3-13 所示。此時開始分析該物體是 否為關節物體。變化,並且儲存現在的場景,當作新的動 態背景。 步驟 5. 若追蹤物體的位置一直與第一次出現的位置相重疊,則回 到步驟 2 重新訓練環境參數。 目前位置→ 第一次出現的位置
2. 分析遮蔽物是否為關節物體: 圖 3-14 為關節物體移動的連續畫面,根據 3.1.2.4 節所提出的物 體追蹤方法,可針對每一格輸入的影像來個別統計出輸入影像與背景 相異之取樣像素的數量於 X 軸和 Y 軸。我們可由擷取出來的遮蔽物體 分析出 X 軸的統計曲線,並紀錄曲線中凹陷點的數量,如圖 3-15 中 X 軸的統計曲線含有 3 個凹陷點。 由圖 3-14 的連續畫面可以發現關節物體移動時,凹陷點的數量會 隨著關節物體的動作線規律性的變化。圖 3-16 為每一格輸入影像之凹 陷點數量的統計圖,當跨步時凹陷點的數量會增加,當雙腳合併時凹 陷點的數量會減少,因此可由凹陷點規律性的變化作為特徵,來分析 偵測到的遮蔽物是否為關節物體。 圖 3-14. 關節物體移動的連續畫面
凹陷點 凹 陷 點 數 量 輸入影像 圖 3-15. 遮蔽物 X 軸統計曲線的凹陷點 圖 3-16.凹陷點數量的統計圖 3.1.2.5 警報裝置 當系統判斷出偵測到的可疑物體為竊賊時,會自動啟動警報裝 置,同時也啟動錄影錄影功能,將整個行竊過程記錄在家電端與遠端 的電腦中,並同時對屋主的行動電話發出手機簡訊,顯示屋內遭入侵 的警告訊息。 3.1.2.6 數位錄影 主要是可以自動儲存與管理系統中錄影功能所錄的影片,使用者 可自行設定影片的儲存量,最高可達 10 FPS (Frames Per Second)。數 位錄影功能可分為手動錄影、保全錄影和定時錄影三種不同的錄影方 式。
3.2 硬體架構
本系統的硬體架構如圖 3-17 所示,遠端遙控電器可透過以下硬體 控制步驟來達成,詳細控制方式會在第四章詳細說明。 步驟 1. Client 端傳送控制命令至 Server 端。 步驟 2. Server 端接收到之後,透過 RS-232 將控制指令送至 Adam 控制模組。 步驟 3. 透過繼電器( SSR, Solid-State Relay )啟動電器。 步驟 4. 遠端使用者可透過 Network Camera 檢視屋內電器的啟動 情形。 RS-232 ADAM SSR SSR Network Camera 插座 1 插座 2 電器 1 電器 2 LAN/WAN Internet Network 家 電 端 伺服器 遠端 1 遠端 2 遠端 3 遠端 4 遙 控 端 . . . 圖 3-17. 硬體架構圖3.2.1 硬體控制結構圖
本節是介紹 PC 如何透過第一章所介紹的硬體裝置來控制家電, 其硬體控制方式如圖 3-18 所示,其控制步驟如下。 步驟 1: Client 端傳送控制命令至 Server 端。 步驟 2: Server 端接收到指令之後,透過 RS-232,將指令傳給 Adam 4522。 步驟 3: Adam 4522 再利用 RS-485 協定,將指令傳給 Adam 4050 模組。 步驟 4: Adam 4050 在收到 Adam 4522 所傳送的指令後便啟動 固態繼電器(Solid-state relay),進而切換交流電源改變 電器狀態。 Adam 4050 Adam 4522 RS-232 介面 插座 3 插座 5 插座 1 插座 4 SSR 2 SSR 3 SSR 4 SSR 5 SSR 1 PC 插座 2 圖 3-18. 硬體控制圖第四章 系統實作
4.1 平台
我們所使用的平台如下: 作業系統: Server 端:Windows XP Client 端:Windows XP硬體:筆記型電腦、Adam 控制模組、SSR(Solid-State relay)、Network Camera 軟體:Visual Basic 6.0
4.2 分工情形
工作項目
工作負責人員
電源控制器架設 施閔馨、歐陽妤旻 Adam 控制程式 歐陽妤旻 網路程式編寫 施閔馨、歐陽妤旻 電器控制功能 歐陽妤旻 虛擬感應開關功能 施閔馨 錄影管理功能 歐陽妤旻 智慧型保全系統 施閔馨 定時功能 施閔馨、歐陽妤旻 登錄使用者管理 施閔馨 專題書面編寫 施閔馨、歐陽妤旻 專題網頁編寫 歐陽妤旻 表 4-1 分工情形4.3 程式規劃
4.3.1 使用的軟體元件
4.3.1.1 MSComm 元件屬性說明 系統中使用 MSComm 通訊元件來控制 RS-232 串列的通訊。 MSComm 控制項的屬性眾多,在此只就使用到的屬性加以說明: (1)CommPort: 設定或傳回通訊連接埠代號。程式必須指定所要 使用的串列埠的號碼,Windows 系統會使用所 設定的通訊埠與外界作通訊,通常我們使用 COM1 來做傳輸。 (2)Settings: 設定初始化參數。以字串的型式設定或傳回連線 速度、同位檢查、資料位元、停止位元等四個參 教。 (3)PortOpen: 設定或傳回通訊連接埠的狀態。使用串列之前必 須先將要使用的串列埠開啟;而在使用完畢之 後,也必須執行關閉的動作。 (4)Output: 將欲傳送的資料寫入傳輸暫存區。當程式需要 傳輸字串至對方時,可將字串使用此一指今寫入 輸出暫存區中,一般的資料均是在送達輸出緩衝 叵後隨即被送出。 (5)HandShaking:指定通訊兩方的交握協定。所謂的「交握協定」 也就是流量管制。 (6)CommEvent:只要有通訊錯誤或事件發生都會產生 OnComm 事件,CommEvent 屬性存有該錯誤或事件的數(7)RTSEnable: 決定是否做 Request To Send(RTS)線有效。 Request To Send 線被用在 RTS/CTS 硬體交握 協定上。RTSEnable 屬性允許使用都以手動方式 輪詢偵測 Request To Send 線以判斷其狀態。 4.3.1.2 使用 MSComm 元件通訊步驟 (1)加入 MSComm 通訊物件。 (2)設定 CommPort 屬性,即設定通訊埠號碼。 (3)設定 HandShaking 屬性,即設定通訊協定。 (4)設定 Settings 屬性,設定傳輸速度等參教。 (5)設定其他參數。若必要時再加上其他的屬性設定。 (6)開啟通訊埠。即 PortOpen 屬性設成 True。 (7)送出字串。使用 Output 屬性。
(8)關閉 MSComm 通訊物件。即 PortOpen 屬性設成 False。
4.3.1.3 WinSock 控制單元屬性說明
WinSock 控制單元可用網際網路通訊協定來將網際網路上的兩台 電腦連結在一起,並交換資料。WinSock 控制單元可在兩種不同的模 式下運作,一是在傳輸控制通訊協定(Transmission Control Protocol, TCP),一是使用者資料傳輸通訊協定(User Datagram Protocol, UDP) 。它們都是建立兩台電腦之間通訊網的網際網路通訊協定。TCP 是一種以連接為主的通訊協定,因為它要求兩台電腦之間必須先建立 實體的連線之後,才可以開始互相傳遞資料。但就另一方面來說,UDP 則是一種不需連結的通訊協定。一台電腦不管是否與它台電腦建立連 線,都可以傳送資料。 以下是 WinSock 控制單元的屬性介紹: (1)LocalHostName,LocalIP 屬性: LocalHostName,LocalIP Properties 這兩個屬性會分別傳回本機 電腦的名稱與 IP 位置。它們都是唯讀的,而且只能再執行時期使用。
(2)LocalPort: 這個屬性可以設定或傳回本機的接駁點。在接收端,就是用來傳送 資料的接駁點。如果要讓應用程式自行指定接駁點,可將此屬性設 為 0。在建立連線之後,指定的接駁點就會作為 TCP 連線之用。在 伺服器端,這就是用來接收用接駁點。如果設為零的話,應用程式 就會自行挑選一個接駁點。在啟動 Listen 方法後,此屬性就會含有 實際挑選的接駁點,它的語法是, WinSock1.LocalPort = xxx xxx 就是接駁點的號碼。LocalPort 可以是 0,可讓兩部電腦以動態 的方式來建立連結。 (3)RemotePort: 利用此屬性可以讀取或設定遠端要連接的接駁點號碼。它的語法是, WinSock1.RemotePort = Port
Port 是要連接的接駁點號碼。當設定 Protocol 屬性時,RemotePort 會自動設為每個通訊協定的正確接駁點號碼。有幾個接駁點號碼是 保留不可使用的。例如,接駁點 80 是給全球資訊網使用,接駁點 21 是 FTP 用的。如果自行開發的應用程式可以使用 1000 到 1024 作為接駁點號碼。 (4)BytesReceived: 這個屬性會傳回目前收到的資料數量(目前存在接收緩衝區的資料 量)。可以使用 GetData 方法取的該資料。 (5)State: 這個屬性會傳回控制單元任何時後的狀態。應用程式可利用此一屬 性讓使用者得知目前連線的狀態。 (6)方法: 在 WinSock 控制單元中有三個方法是可以用來撰寫程式的,它們分 別是,SendData (傳送資訊),GetData(讀出傳來的資訊),和
(7)SendData: 傳送一各區塊的資料到遠端電腦中。它的語法是, WinSock1.SendData Data 參數 Data 是儲存要傳送資料的變數。若要傳送二進位的資料,可 以使用二元陣列。如果此參數中的資料是 UNICODE,則在傳送前會 轉成 ANSI 字串。 (8)GetData: GetData 是截取目前區塊資料,並將資料儲存到 Variant 型態的變數 中,它的語法是,
Winsock1.GetData, Type, maxLen
參數 Data 是用來儲存接收到資料的變數。Type 可以區別所接收到 資料的型態。MaxLen 可以指定所收到位元組陣列或字串的大小。 (9)Event: WinSock 控制單元所觸發的事件程序可允許程式間控資訊傳送的進 度,並且也可以處理發生的錯誤。 (10)SendCo mplete: 這個事件會在 SendData 執行結束之後發生,以便傳送的電腦知 道資料傳送已完成。雖然 SendComplete 事件可以讓程式知道資 料已送出了,但不能確定資料是否已經到達對方的電腦了。 (11) SendProgress: 這個事件會在傳送中發生。透過這個事件可以監控檔案的傳輸過 程。它的定義是,
WinSock1_SendProgress (bytesSent As Long, bytesRemaining As Long)
bytesSent 就是此事件最後依次觸發所傳送的資料位元組, bytesRemaining 則代表還有多少位元組要傳送。
(12)Error:
在背景傳送資料時,若發生錯誤,就會觸發一事件。其定義為,
Object_Error (Number As Integer, Description As String, Scode As Long, Source As String, HelpFile As String, HelpContext As Long, CancelDisplay As Boolean)
參數 Number 是整數型態,它會傳回錯誤代碼。Description 參數 會將錯誤的意義傳回。參數 Scode 是長整數,其值是由 PeekData 方法的 Type 參數傳回,代表傳輸過程中所發生的錯誤。Source 參數是描述錯誤來源的字串。HelpFile 與 HelpContext兩個參數都 是用來表示觸發 Error 事件錯誤的輔助說明。最後一個參數, CancelDisplay 則指定是否要顯示錯誤訊息。如果設為 False,就 會顯示錯誤訊息;如果不想顯示,就把它改為 True。 4.3.1.4 MAPI 控制單元
MAPI 是 Messaging Application Program Interface 的縮寫 Visual Basic 中有 2 個 MAPI 控制項,分別是 MAPISession 與 MAPIMessages,MAPISession 控制項可登入並且建立一個 MAPI 連線(session),也可以用來結束一個 MAPI 連線;而
MAPIMessages 控制項讓使用者可以執行多種郵件系統的功能。如 果要正常執行含有 MAPI 控制項的 VB 程式,作業系統中必須安裝 MicroSoft Exchnage(主要用到的是 32 位元 MAPI DDLs),否則將 無法完成一些 MAPI 的功能。
4.4 Adam 控制指令
系統中所使用的四個 Adam 四個控制指令分別為: 1.初始化命令 2.回傳 Adam 狀態 3.送出開起/關閉指令 4.讀取 DO,DI 狀態 四種指令的內容如下: 1. 初始化命令:%AANNTTCCFF(cr) AA:表機器 ID NN:表將要設成的新 ID TT:固定 40H CC:表傳輸的 Baud RateFF:第六 Bit 表是否有 Checksum,其餘 Bits 皆保留
回傳: !AA(cr):表命令正確 ?AA(cr):表非法命令 2. 回傳 Adam 狀態:$AA2(cr) AA:表機器 ID 回傳: !AATTCCFF(cr):表命令正確,傳回狀態,格式同命令 1 ?AA(cr):表非法命令
3. 送出開起/關閉指令:#AABB(data)(cr) AA:機器的 ID 碼 BB:有兩種選擇 1.若為 00,表示設定所有 Channel,後面兩個(Data)代表 8 個 bits。 2.若第一個字為 1,表示要設定單一 Channel,下個字表示 要設定的 Channel 編號。 (Data):表要設定的資料值 回傳: >(cr):表命令正確 ?AA(cr):表非法命令 4. 讀取 DO,DI 狀態:$AA6(cr) AA:機器的 ID 碼 回傳: !(DataOutput)(DataInput)00(cr):表命令正確 ?AA(cr):表非法命令 (前兩 Byte 表 8 個 DO 狀態,後兩 Byte 表 7 個 DI 狀態, 最後兩個則固定為 0) (cr):在此表示 Carriage Return。
第五章 系統使用說明
5.1 系統安裝說明
5.1.1 硬體安裝
硬體安裝如圖 5-1 所示,其詳細安裝步驟如下(請對照圖 5-1 中的 標示): 步驟 1:將網路攝影機的網路線接至主機的 RJ-45 連接埠。 步驟 2:接上網路攝影機的電源。 步驟 3:將電源控制器的 RS-232 接頭接至主機的 RS-232 串列埠。 步驟 4:接上電源控制器的電源。 步驟 5:將電器插頭插在電源控制器的插座上。 其中,電源控制器的插座上方皆有編號如圖 5-2 所示。軟體在設 定時會要求使用者輸入電器所安裝的插座編號,因此當使用者將電器 安裝於電源控制器時,請務必記住電器所安裝的插座編號。 主 機 電 器 3 1 4 5 2 網路攝影機 電源控制器 圖 5-1. 硬體安裝說明圖5.1.2 啟動電源控制器
將電源控制器右側的開關切到的 ON 位置如圖 5-3 所示,即可啟動電 源控制器。 圖 5-2 . 電源控制器上方的插座編號 圖 5-3 . 電源控制器開關的位置5.1.3 軟體安裝
將遠端家電控制與智慧型保全系統光碟片放入光碟機,會自動進 入系統安裝畫面如圖 5-4 所示,選擇完安裝路徑後即可進行安裝。 圖 5-4 . 系統安裝畫面5.1.4 啟動遠端家電控制與智慧型保全系統
若系統已安裝至作業系統中,則啟動程式存放在「程式集」資料夾 下「遠端家電控制與智慧型保全系統」的資料夾中如圖 5-5 所示。系 統啟動步驟如下: 步驟 1: 先按「開始」鈕。 步驟 2: 由選單中選取「程式集」資料夾。 步驟 3: 選單「遠端家電控制與智慧型保全系統」資料夾。 步驟 4: 最後執行「遠端家電控制與智慧型保全系統」。 圖 5-5. 啟動遠端家電控制與智慧型保全系統5.2 系統操作說明
遠端家電控制與智慧型保全系統的主操作畫面如圖 5-6 所示。操作 介面中的各項功能說明請參照標示編號。 2 1 3 4 5 7 6 9 8 圖 5-6. 操作畫面 1. 切換操作模式:可將系統切換至 Server 和 Client 兩種操作模式,分 別使用於家電端及遠端。(詳細說明於 5.2.2 節) 2. 保全系統:顯示目前屋內監控狀態,並可設定警報裝置。(詳細說明 於 5.2.6 節) 3. 主工具列:包含了建立各項物件、儲存載入設定、操作記錄以及功 能說明等功能操作。(詳細說明於 5.2.1 節) 4. 操作功能切換鈕:切換操作介面為複雜操作功能或簡易操作功能。6. 電器控制面板:提供使用者有效地操作已設定的電器物件。(詳細說 明於 5.2.3 節) 7. 虛擬感應開關面板:提供使用者在屋內的特定區域以手部揮動的感 應方式來啟動電器、錄影裝置或保全系統。(詳 細說明於 5.2.4 節) 8. 錄影控制面板:可以自動儲存與管理系統中錄影功能所錄的影片。 (詳細說明於 5.2.5 節) 9. 定時控制面板:提供使用者在指定的時段內啟動指定的物件,包含 家電、虛擬感應開關、錄影裝置以及保全系統。 圖 5-7. 簡易操作功能畫面
5.2.1 主工具列
資料上傳:使用者可在遠端設定系統中的各項功能,並透過此工 具鈕將設定好資料上傳至家中的主機並加以更新。 (此功能用於 Client 操作模式中) 登錄管理:此系統主要是對登入的使用者加以管理,並設定登入 者的操作權限,保護系統免於被有心人士利用。(此 功能用於 Server 操作模式中)新增物件:系統中包含了電器、虛擬開關、錄影裝置、定時裝置 和保全系統共五種控制物件,其中電器和虛擬開關兩 種物件可利用此工具鈕直接從攝影畫面中選取物件 所有位置來產生。其詳細的操作步驟在 5.2.3 節會詳 細介紹。 載入設定:由工作路徑中載入指定的設定檔至系統中的各項功能 設定。 儲存設定:將目前系統中所有的功能設定儲存成設定檔於工作路 徑中。 操作記錄:記錄系統中各項控制物件包括電器、虛擬開關、錄影 裝置、定時裝置以及保全系統的啟動關閉時間。 (Server 操作模式中還包括記錄遠端使用者的帳號、 登錄時間和來源 IP 等相關登錄資料) 功能說明:根據系統中各項功能包括遙控電器、虛擬開關控制、 錄影裝置、定時裝置以及保全系統的操作步驟加以說 明。
5.2.2 系統操作模式
本系統包含了 Server 和 Client 兩種操作模式,分別使用於家電端 及遠端。切換鈕位於圖 5-6 中標示 1 的位置,使用者在家中必須使用 Server 操作模式與電源控制器連線;在遠端時則將必須使用 Client 操 作模式與家中主機連線。 5.2.2.1 Server 操作模式 當系統切換至 Server 操作模式時,便可以接收遠端使用者所送的 控制指令,再依控制指令啟動或關閉家中的電器。同時 Server 操作模 式透過網路攝影機所輸入的影像對屋內作監控的動作。另外,在 Server 操作模式下可使用虛擬感應開關功能,提供使用者在屋內的特定區域欲將系統切換至 Server 操作模式,可直接 按下主操作畫面左上方的切換鈕,此時切換 鈕中會顯示 Server 操作模式圖示如左圖所 示。切換至 Server 操作模式後,系統會自動和電源控制連線,若未連 線則會出現警告訊息視窗。另外在 Server 操作模式下的主工具列會出 現登錄管理鈕 , 用來管理所有登錄的使用者,詳細說明會在 5.2.8 節中。 5.2.2.2 Client 操作模式 當系統切換至 Client 操作模式時,使用者可在遠端遙控家中的電 器,並可透過網路攝影機所傳來的影像檢視屋內電器的啟動情形。另 外,由於網路攝影機內建了一個 web server,因此即使屋內的主機未 開啟也可以在遠端透過 Client 操作模式執 行保全監控。 欲將系統切換至 Client 操作模式,可直接按 下主操作畫面左上方的切換鈕,此時切換鈕 中會顯示 Client 操作模式圖示如左圖所示。切換至 Client 操作模式後, 系統會自動出現連線視窗如圖 5-8 所示。使用者只要輸入帳號、密碼 和 Server 端的位址,即可連線至 Server 端。 圖 5-8 . 連線視窗
5.2.3 電器控制
當電器安裝於電源控制裝置,使用者尚須在軟體上設定該電器在 攝影畫面中的位置以及安裝的插座編號等資訊,才可以透過軟體由家 電端或遠端控制該電器。首先,使用者必須新增控制電器至電器控制 面板,接下來可以透過電器控制面板或直接由攝影畫面控制安裝的電 器,詳細操作說明如下。 5.2.3.1 新增控制電器 步驟 1:按下主工具列中的新增物件鈕。 步驟 2:將游標移至攝影畫面,此時游標會變成十字形。接著按下 滑鼠左鍵不放拖曳,選取該電器在影像上的位置如圖 5-9 所示 (拖曳時若按下滑鼠右鍵可取消選取)。 步驟 3:當選取完成放開滑鼠左鍵,即出現新增物件視窗如圖 5-10 所示。 步驟 4:於物件名稱輸入框中輸入電器名稱。 步驟 5:於物件種類下拉式清單中選取控制家電。 步驟 6:於安裝插座下拉式清單中選取該家電所安裝的插座編號(若 選擇的插座已被其他電器所使用,則會顯示警告視窗如圖 5-11 所示)。 步驟 7:按下確定鈕,電器即新增至電器控制面板上。圖 5-10 . 新增物件視窗 圖 5-11 . 插座重複使用警告視窗 5.2.3.2 使用電器控制面板
電器控制面板如圖 5-12 所示,其主要功能是提供使用者有效地操 作已設定的電器物件。面板中會顯示所有安裝的電器圖示以及該電器 的名稱與目前狀態,當滑鼠游標移至圖示上方時會自動顯示該電器所 安裝的插座編號。電器控制面板中的功能鈕分別表示如下: 改變電器狀態 (ON / OFF) 將電器加入至定時設定 電器可由虛擬感應開關控制 重新設定電器所在位置 從電器控制面板中刪除電器 欲修改電器在電器控制面板上所設定的插座編號,使用者可直接 按下電器所安裝的插座編號鈕 ,出現變更插座編號視窗如圖 5-13 所示。此時在變更插座編號下拉式清單中選取重新設定的插座編 號,若該插座編號已被其他電器使用,則這兩個插座編號會直接互換。 另外,使用者也可以直接從攝影畫面中改變電器的狀態,只要將 滑鼠游標移至畫面中欲控制的電器上,該電器周圍便浮現成按鈕狀如 圖 5-14 所示,按鈕下方會標示電器名稱即目前狀態,此時在電器鈕上 按下滑鼠左鍵即可改變該電器的狀態如圖 5-15 所示。
圖 5-12 . 電器控制面板
圖 5-13 . 直接從攝影畫面中改變電器狀態
5.2.4 虛擬感應開關功能
虛擬感應開關主要是提供使用者在屋內的特定區域以手部揮動的 感應方式來改變單一或多項物件的狀態,包含電器、錄影裝置或保全 裝置,如圖 5-16 所示。使用者可以利用主工具列中的新增物件功能產 生虛擬感應開關,並使用虛擬感應開關功能中的設定功能來編輯欲啟 動的物件,完成之後使用者可在屋內所設定的區域中以手部來回揮動 一次改變連結物件的狀態。另外,虛擬感應開關可以直接設在電器物 件上,使用者可以直接在電器前以手部來回揮動一次改變該電器的狀 態。 圖 5-16 . 以手部揮動的感應方式來改變電器的狀態 5.2.4.1 新增虛擬感應開關 步驟 1:按下主工具列中的新增物件鈕。 步驟 2:將游標移至攝影畫面,此時游標會變成十字形。接著按下 滑鼠左鍵不放拖曳,選取該虛擬感應開關在影像上的位置 (拖曳時若按下滑鼠右鍵可取消選取)。 步驟 3:當選取完成放開滑鼠左鍵,即出現新增物件視窗如圖 5-10 所示。 步驟 4:於物件名稱輸入框中輸入虛擬感應開關的名稱。 步驟 5:於物件種類下拉式清單中選取虛擬感應開關。 步驟 6:按下確定扭,該虛擬感應開關即新增至虛擬感應開關控制 面板上。5.2.4.2 使用虛擬感應開關控制面板 虛擬感應開關面板如圖 5-17 所示,其主要功能是提供使用者有效 地操作已設定的虛擬感應開關物件。面板中會顯示所有已設定的虛擬 感應開關圖示以及該虛擬感應開關的名稱與目前狀態。一個虛擬感應 開關可以控制改變單項或多項物件的狀態,如電器、錄影功能或保全 功能。當滑鼠游標移至圖示 上方時會自動顯示該虛擬 感應開關所連結的電器物 件如圖 5-20 所示。而虛擬 感應開關控制面板中的功 能鈕分別表示如下: 圖 17 . 虛擬感應開關控制面板 圖 5-17 . 虛擬感應開關控制面板 改變虛擬感應開關狀態 將虛擬開關設為定時啟動 設定虛擬感應開關的控制物件 重新設定感應位置 刪除虛擬感應開關 使用者可利用電器控制面板中的 功能鈕將電器物件同時設成 虛擬感應開關物件,此時該電器物件會新增至虛擬感應開關控制面板 上,因此該虛擬感應開關所感應的區域即該電器在影像上的區域。使 用者可以直接在電器前以手部揮動改變該電器的狀態如圖 5-18 所示。
5.2.4.3 設定虛擬感應開關的控制物件 一個虛擬感應開關可以同時啟動單一或多項物件的狀態,包含電 器、錄影裝置或保全裝置,因此使用者可使用虛擬感應開關控制面板 中的 功能鈕啟動虛擬感應開關設定視窗如圖 5-19 所示,來設定欲 連結的控制物件。 設定視窗左方會顯示現存物件項目,使用者可按 鈕加入至該開 關所啟動的物件項目,或按 鈕從啟動物件項目中移除。當滑鼠游標 移至面板中已設定的虛擬感應開關圖示,會自動顯示所有啟動電器的 連結如圖 5-20 所示。 圖 5-19 . 虛擬感應開關設定視窗 圖 5-20 . 虛擬感應開關設定視窗
5.2.5 錄影管理功能
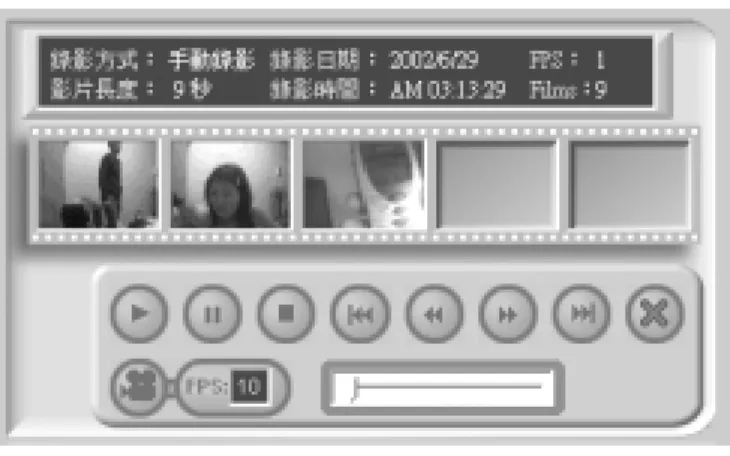
此功能主要是可以自動儲存與管理系統中錄影功能所錄的影片, 使用者可自行設定影片的儲存量,最高可達 10 FPS (Frames Per Second)。錄影管理功能除了會自動儲存影片,並提供完整的播放功 能,讓使用者可以很方便地檢視所有記錄的影片。錄影管理功能所錄 的影片可分為手動錄影、保全錄影和定時錄影三種不同的錄影方式分 別表示如下: 手動錄影:使用者可自行用錄影管理功能中的 鈕錄影。按 鈕中含有一個輸入框可以讓使用者設定影片的 FPS。 定時錄影:在使用者設定的時間內錄影,相關操作會在 5.2.7 節加以說 明。 保全錄影:此錄影方式和前面兩者最大的不同在於保全錄影是當保全 系統偵測到可疑物體時所自動錄下的影片,非使用者所控 制。 5.2.5.1 使用錄影管理面板 錄影控制面板如圖 5-21 所示。已錄過的影片會以縮圖的方式將第 一格的畫面顯示於面板上。當用滑鼠點選影片圖示時,面板上方的影 片資訊會顯示該部影片的錄影方式、影片長度、錄影日期、錄影時間、 影片的格數和 FPS。錄影時,攝影畫面的左上角會出現 ●REC 閃爍 表示正在錄影,錄完後會自動將影片圖示顯示於面板上。另外在面板 下方的功能鈕可用來檢視影片圖示中的影片,其功能分別表示如下: 播放影片 暫停播放影片 停止播放影片 移至影片開端 影片倒轉 影片快轉 移至影片尾端 刪除影片 手動錄影圖 5-21 . 錄影管理面板
5.2.6 智慧型保全系統說明
使用者可利用保全功能對屋內作有效的監控,保障屋內安全。系 統啟動時會自動調整與設定保全裝置,使用者不需作任何設定即可有 效的偵測出所有可疑物體並加以分析與追蹤。當系統判斷出偵測到的 可疑物體為竊賊時,會自動啟動錄影功能,將整個行竊過程紀錄在家 電端與遠端的電腦中,並同時對屋主的行動電話發出手機簡訊,顯示 屋內遭入侵的警告訊息。 5.2.6.1 保全控制面板 使用者可利用面板中的 鈕啟動保全系統以及 鈕設定警報裝 置。其中,面板裡的看門狗會以動畫的方式顯示目前監控狀態。當保 全系統啟動時,看門狗會左右環顧如圖 5-22 所示,表示正在監控屋內 環境。當發現竊賊時,看門狗便會開始吠如圖 5-23 所示。當保全系統 關閉時,看門狗會自行趴下休息如圖 5-24 所示。 監控保全功能啟動後,在監控過程中當系統偵測到屋內遭入侵, 會自動警報裝置。使用者可以使用 鈕開啟警報裝置設定視窗如圖 5-27 所示,視窗中包含了警報設定、分析輸入影像和背景狀態圖三個 部分。圖 5-22.保全系統監控中 圖 5-23.保全系統發現竊賊 圖 5-24.保全系統關閉中 5.2.6.2 警報設定 當警報被觸發時,保全功能有三種反應方式供使用者選擇來達到 警報功用,此三個選項的表示如下: (1)傳送警告簡訊至屋主手機:勾選此項目當後警報被觸發時,系統會 自動依使用者所輸入 E-Mail 將簡訊內 容傳送到屋主的行動電話中(行動電話 必須可以接收電子郵件)。 (2)啟動錄影裝置:勾選此項目當後警報被觸發時會自動啟動錄影裝 置,根據使用者所設定的 FPS 值錄下竊賊的犯罪 過程。 (3)啟動警報聲:勾選此項目之後,當後警報被觸發時,系統會自動播 放使用者預設選定的音效檔來嚇阻竊賊。 5.2.6.3 分析輸入影像 假設保全系統啟動時如圖 5-25 所示,當有人走進畫面中時如圖 5-26 所示,影像分析畫面會顯示出偵測到的物體如圖 5-27 所示,並加 以分析追蹤到的物體。影像分析畫面下方有兩個選項分別表示如下: (1) 顯示分析曲線:勾選則會顯示追蹤物體的分析曲線,系統會自行由 分析曲線判斷偵測到的物體是否為關節物體還是 外頭天色變化所造成的光影變化。
圖 5-25. 保全系統啟動時所偵測的屋內環境 圖 5-26 . 人進入屋內時被系統偵測並加以追蹤 圖 5-27 .警報裝置設定視窗
5.2.7 定時功能
定時功能如圖 5-28 所示,主要是提供使用者在指定的時段內啟動 指定的物件,包含家電、虛擬感應開關、錄影裝置以及保全系統。使 用者首先把要定時啟動的物件加入定時控制面板中。接下來,使用者 可用定時控制面板中的功能鈕,設定物件的啟動時段。物件資訊 工作佇列 定時物件圖示 物件名稱和 啟動時間 目前時間 定時功能鈕 時間軸 物件啟動時段 圖 5-28 . 定時控制面板 5.2.7.1 新增定時控制物件 電器控制面板和虛擬感應開關面板中均包含了一個 功能 鈕,使用者可透過它將電器物件和虛擬感應開關物件加入定時控制面 板中,此時該物件也同時成為定時控制物件,可以在指定的時段中執 行。另外,錄影裝置和保全系統本身也是定時控制物件之一,使用者 可直接設定啟動時段。 5.2.7.2 使用定時控制面板 定時控制面板中包含了定時物件資訊,定時物件圖示和物件時間 軸,如圖 5-28 所示和當滑鼠游標移至定時物件圖示時,會自動顯示該 物件的資訊以及在時間軸上的啟動時間。其中物件資訊中除了顯示物 件名稱、種類以及狀態外,還會顯示目前時間、下次啟動時間,以及 距離下次被啟動所剩下的時間。另外在物件資訊的右上方則顯示該定 時物件在工作佇列中的位置,此功能會在下一節詳細說明。定時控制 面板中含有四個功能鈕,分別表示如下:
新增物件啟動時段。 改變定時物件狀態 ( 啟動或關閉 )。 修改物件啟動時段。 刪除定時物件 5.2.7.3 時間軸與工作佇列 時間軸主要是用來顯示定時物件的啟動時段,時間軸上所標示的是 一天的時間,由 00 時至 24 時。在圖 5-28 中,當游標移至電風扇圖示 時,時間軸所顯示電風扇的啟動時段分別在 3 點 25 分時啟動 233 分 鐘,以及在 14 點 35 分時啟動 185 分鐘。 5.2.7.4 新增物件啟動時段 假設現在要為電風扇新增一個啟動時段,由 14 點 35 分開啟家電 至 17 點 40 分關閉電器,則設定步驟如下: 步驟 1:游標移至電風扇圖示上方,此時圖示周圍會以紅框圍住。 步驟 2:按下 鈕。 步驟 3:當游標移至時間軸時會出現粗調鈕和粗調鈕所在的時間。 (粗調鈕會隨著滑鼠游標左右移動,移動 一格表示移動 15 分鐘,因此它顯示每 個鐘頭的 00 分、15 分、30 分、45 分。) 步驟 4:將粗調鈕移至 PM 2 : 30 的位置。 步驟 5:按下粗調鈕不放,出現微調滑桿如 右圖所示。 步驟 6:此時移動一格表示移動一分鐘,可 由粗調鈕所在的時間往前往後各 微調 15 分鐘。 步驟 7:微調至 PM 2 : 35 時放開滑鼠左鍵, 即設定啟動時間為 14 點 35 分。 步驟 8:往右移動滑鼠將粗調鈕移至接近關閉 時間 PM 5:45。
步驟 9:按下粗調鈕並利用微調滑桿將時間 微調至 PM 5:40。 步驟 10:放開滑鼠左鍵則啟動時段會顯示於 時間軸上如圖所示,啟動時 段會顯示啟動時間和啟動時 間長度。設定完成電風扇將 會在 14 點 35 分啟動,17 點 40 關閉,長 185 分鐘。
5.2.8 登錄使用者管理
近年來隨著網路快速發展與普及,使得網路安全更顯得重要。遠端 家電控制與智慧型保全系統由於可以透過網路來控制家中電器並取得 屋中影像,因此系統必須多一層保護對登入的使用者加以管理,防止 被有心人士利用。使用者管理介面如圖 5-29 所示,提供使用者在 server 模式下,對所有登入的使用者會給予不同的使用權限,並檢查使用者 的來源 IP 位址是否合法。按下主工具列中的登錄管理鈕 ,即可 進入登錄使用者管理視窗。 5.2.8.1 新增登入使用者 步驟 1:按下使用者清單下方的 鈕,即出現新增使用者的對話視 窗,如圖 5-30 所示。 步驟 2:輸入新增的使用者帳號和密碼。 步驟 3:設定操作權限,包含 4 個核選方塊(可複選) (1) 新增物件:選取此選項,則該使用者可對系統新增各種物件。 (2) 控制物件:選取此選項,則該使用者可控制系統中所有的物件。 (3) 修改物件:選取此選項,則該使用者可對系統中物件任意修改。 (4) 刪除物件:選取此選項,則該使用者可刪除系統中的物件。 步驟 4:設定限制來源 IP 規則 (5.2.8.4 節會詳細介紹)。圖 5-29 . 使用者管理介面 圖 5-30 . 新增使用者的對話視窗 5.2.8.2 修改登入使用者資料 可直接點選使用者帳號清單中的使用者帳號,檢視該使用者的各 項設定內容。修改完欲修改的項目後按下 即可完成修改。 5.2.8.3 刪除登入使用者 步驟 1:在使用者管理介面中的使用者帳號清單中選取欲刪除的使 用者帳號。 步驟 2:按下 鈕,即可刪除此使用者。
5.2.8.4 限制來源 IP 限制來源 IP 主要是用來限制使用者只能由特定的網域登錄,避免 有心人士利用他人的帳號密碼登錄 server 端。透過限制來源 IP 規則, 可以設定使用者由指定網域登錄或限制由指定網域登錄。新增限制來 源 IP 規則步驟如下: 步驟 1:按下 按扭,即出現新增限制來源 IP 規則視窗如圖 5-31 所示。 步驟 2:選擇限制方式,有以下兩種方式: (1)允許進入規則:所設定的來源網域可允許登錄 server 端。 (2)限制進入規則:所設定的來源網域被禁止登錄 server 端。 步驟 3:在輸入框中輸入限制來源 IP (字元’* ’表示 0 至 255,假設 IP 設為 140.134.26.* 則表示的網域涵蓋 140.134.26.0 至 140.134.26.255)。 步驟 4:確認內容後按下 即可新增限制來源 IP 規則,否 則按下 取消新增限制來源 IP 規則。 圖 5-31. 新增限制來源 IP 規則