行政院國家科學委員會專題研究計畫 成果報告
解讀意圖對嬰兒表徵與模仿他人的動作之影響(第 2 年)
研究成果報告(完整版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 98-2628-H-004-002-MY2 執 行 期 間 : 99 年 08 月 01 日至 100 年 10 月 31 日 執 行 單 位 : 國立政治大學心理學系 計 畫 主 持 人 : 黃啟泰 計畫參與人員: 學士級-專任助理人員:趙婉婷 學士級-專任助理人員:蒙宛筠 碩士班研究生-兼任助理人員:黃思賓 公 開 資 訊 : 本計畫涉及專利或其他智慧財產權,1 年後可公開查詢中 華 民 國 101 年 01 月 21 日
中 文 摘 要 : 本研究以眼跡追蹤方法探討不同行為動因如何影響嬰兒知覺 目標導向的動作。實驗 1-1 修正 Falck-Ytter, Gredebä;ck 和 Hofsten (2006)等人的設計,呈現予 8 個月的嬰兒一系列由人手或布手產生的動作事件,以眼跡追 蹤儀(Tobii 1750)紀錄嬰兒觀看影片的注視反應。在人手動 作組中,嬰兒在電腦螢幕上觀看人手持一串珠子從左右方向 隨機出現,將珠子投入桌面上兩個不同容器之其中一個;在 布手動作組中,嬰兒觀看布手持一串珠子完成上述的動作。 結果發現:注視動作路徑的時間隨嘗試次數增加而減少,注 視目標與非目標的時間則無熟悉效果,但動作者為人手時, 嬰兒注視目標的時間較長,注視非目標或動作路徑的時間沒 有組間差異。根據受試者 8 個月大時在短路徑嘗試中注視目 標的平均時間,實驗 1-2 以平均時間中數進一步將受試者區 分為短目標注視時間與長目標注視時間組,比較目標注視時 間的差異是否預測 12 個月大時的模仿表現。結果發現:8 個 月時以視覺作業所測得之對目標的敏感度,並不能預測 12 個 月時的模仿表現。實驗 2 以實驗 1-1 的刺激影片為基礎,單 獨呈現動作者經過的路徑(動作者行經一段距離後,選擇停在 其中一容器的上方,並未將珠子向下投入容器中),進一步澄 清結果在目標知覺的角色。此外,納入一組新的動作者情境 ─自發動的珠子(簡稱珠子組),探討視覺標示及運動線索對 路徑注視偏好的相對影響。結果發現:當珠子與容器之間並 沒有目標導向的關係,嬰兒不會因動作者的性質,而選擇性 注意空間相近的終點物體,顯示結果是表徵目標的必要元 素。另一方面,觀看珠子自發動的動作時,雖然運動過程 中,珠子位置隨著運動不斷改變,並未像人手或布手在畫面 上留下路徑延伸的視覺標示,但各組嬰兒花相似時間注視動 作路徑,顯示運動線索在決定路徑的注視偏好上,比視覺標 示扮演更重要的角色。綜合上述發現,表徵目標的早期機制 似乎較依賴人產生的動作,當人手提供行為動因時,有助於 嬰兒解讀結果為動作目標,因此選擇性注意目標,當結果狀 態從呈現的動作移除後,嬰兒並不因行為動因不同而選擇性 注意終點物體。 中文關鍵詞: 眼跡追蹤、目標導向的動作、鏡相神經元理論、目的推理 論、目標、意圖
英 文 摘 要 : Previous research has shown that acts produced by people are more likely to induce goal attribution than acts produced by self-propelled objects (Falck-Ytter et al., 2006; Woodward, 1998). These provide support for the view that goal perception benefits
from action experience and familiar agents, as contrasted with the opposing view that goal perception is based on cue bootstrapping and not necessarily subject to human acts (Biro & Leslie, 2007). Experiments 1-1 and 1-2 were designed to
replicate the superiority to human over nonhuman acts on goal attribution; and explore whether such a tendency could serve as a predictive marker of imitation skills.
We assessed infants’ visual tracking of goal selection events at 8 months of age. After four months, imitative ability was assessed. There were two conditions. In the person agent (PA) condition, infants saw a human hand grab a chain of beads, select and put the chain into one of two containers. In the object agent (OA) condition, they saw the event performed by an artificial hand. The imitation test comprised six novel acts with objects.
The results showed that infants in PA spent more time looking to the goal container than infants in OA. They were further designated as short or long goal lookers based on the median of goal looking time. Comparing performance on the imitation test between short and long goal lookers, the results revealed no predictive relationships.
Experiment 2 clarified the role of outcome in goal perception. Infants saw the agent’s movement path. An additional self-propelled object condition was included. When there was no specified
goal-directedness, infants did not selectively attend to the end container according to agent types.
The findings suggest that the mechanism of goal
attribution underlying action processing is sensitive to human agency. However, the predictive relationship between action perception and imitation is not
established and needs further investigation.
英文關鍵詞: Eye tracking; Goal-directed action; Mirror neuron system theory; Teleological reasoning theory; Goal; Intention
目次
第一章 文獻簡介
1
第二章 實驗 1-1
6
第一節 研究方法7
第二節 結果與討論11
第三章 實驗 1-2
20
第一節 研究方法21
第二節 結果與討論23
第四章 實驗 2
25
第一節 研究方法25
第二節 結果與討論29
參考文獻
35
附錄(已投稿論文)
37
II
圖表目次
圖 1 實驗 1-1 的影片刺激 9
圖 2 實驗 1-1 的注視興趣區塊(areas of interest, AOI) 11
圖 3 實驗 1-1:動作者移動路徑示意圖 14
圖 4 實驗 1-2 模仿作業的實驗刺激 23
圖 5 實驗 2 的影片刺激 28
圖 6 實驗 2 的注視興趣區塊(areas of interest, AOI) 29
表 1 實驗 1-1:珠子經短路徑到達目標,嬰兒注視目標所需的潛伏期(ms) 12 表 2 實驗 1-1:珠子經長路徑到達目標,嬰兒注視目標所需的潛伏期(ms) 12 表 3 實驗 1-1:經由短路徑時,運動過程中,路徑、目標及非目標的平均注 視時間(ms) 13 表 4 實驗 1-1:經由長路徑時,運動過程中,路徑、目標及非目標的平均注 視時間(ms) 13 表 5 實驗 1-1:經由短路徑時,嬰兒初次注視終點物體與珠子到達終點物體 的平均時間(ms)差異 15 表 6 實驗 1-1:經由長路徑時,嬰兒初次注視終點物體與珠子到達終點物體 的平均時間(ms)差異 15 表 7 實驗 1-1:經由短路徑時,運動期間內首次注視物體為目標或非目標的 平均比率 16 表 8 實驗 1-1:經由長路徑時,運動期間內首次注視物體為目標或非目標的 平均比率 16 表 9 實驗 1-1:不同動作組嬰兒最初與最後三次嬰兒注視運動期間與結果狀 態的整體時間比率 17 表 10 實驗 1-1:不同動作組嬰兒在運動期間與結果狀態內,最初與最後三次 注視目標物、非目標物及運動路徑的注視時間比率 18 表 11 實驗 1-1:不同動作組嬰兒在運動期間與結果狀態內,最初與最後三次 注視目標物、非目標物及運動路徑的注視次數比率 19 表 12 實驗 1-2:根據 8 個月大時,在短路徑嘗試中,運動期間內,注視目標 的平均時間中位數,嬰兒被歸類為長注視者與短注視者的人數,及分組 後各組的平均注視時間與模仿表現分數 24 表 13 實驗 2:經由短路徑或長路徑到達終點物體上方,嬰兒注視終點物體所 需之潛伏期(ms) 30 表 14 實驗 2:經由短路徑時,運動過程中,路徑、終點物體及非終點物體的
III 平均注視時間 31 表 15 實驗 2:經由長路徑時,運動過程中,路徑、終點物體及非終點物體的 平均注視時間(ms) 32 表 16 實驗 2:經由短路徑時,嬰兒初次注視終點物體與珠子到達終點物體的 平均時間(ms)差異 33 表 17 實驗 2:經由長路徑時,嬰兒初次注視終點物體與珠子到達終點物體的 平均時間(ms)差異 33 表 18 實驗 2:經由短路徑時,運動期間內首次注視物體為終點物體或非終點 物體的平均比率 34 表 19 實驗 2:經由長路徑時,運動期間內首次注視物體為終點物體或非終點 物體的平均比率 34
第一章
文獻簡介
嬰兒在第一年結束前便能透過不同的社會訊息來對他人心智狀態作出推 論,像是注視追隨(gaze-following)、指示性手勢(pointing)或是模仿目標導引的動 作等能力,被認為是瞭解心智狀態的前驅能力(Carpenter, Nagell, & Tomasello, 1998)。Tomasello (1995)認為瞭解他人意圖的能力有賴於嬰兒的意圖發動性 (intentional agency),即是否瞭解行為與行為引發的結果之間的意圖關係。關於意 圖發動性的本質為何、及其如何發展,是近年來新興的發展社會認知神經科學領 域裡熱烈討論的一個研究議題。 意圖發動性是行為者發動意志行為所需的心智狀態,是幼兒掌握複雜的心智 狀態(如欲望、信念)的前驅能力,釐清意圖發動性的本質可以幫助我們瞭解在生 命的早期嬰兒如何獲得有關人類行為與外在世界的因果知識,透過這些知識啟 蒙,嬰兒進入社會世界,學習與他人互動。然而,對於意圖發動性如何發展,發 展心理學家的觀點並不一致。 這些爭論可以歸納為二大立場:經驗基礎論(experience-based theories),與線 索基礎論(cue-based theories)。經驗基礎論認為嬰兒透過觀察或執行動作的經驗, 逐漸獲得意圖發動性的概念,這些經驗內容影響嬰兒選擇性地歸因意圖或目標等 心智狀態予人類的行為(Meltzoff & Moore, 1994; Woodward, Sommerville, & Guajardo, 2001)。相反地,線索基礎論或目的論立場論(teleological stance theories) 則認為意圖發動性源自一組能夠使用線索、推論目標的認知計算系統,此系統的 運作不必要局限於人的行為,它可以彈性地計算任何人或物體所產生的行為,只 要有足夠的線索,此系統可以根據因果合理性計算出動作者的目標。此二理論各 有各自的擁護者,提供強有力的理論背景。這些理論背景主要建立在模仿與動作 表徵的發展研究。因此,本計畫首先分別回顧模仿與動作表徵的最近文獻,評述 當代爭議的問題,再說明如何以本人實驗室過去幾年的研究成果為基礎,在未來 的三年中以系統化的實驗來加入這場辯論。 經驗基礎論 Woodward 或許是第一位系統地提出證據,說明嬰兒在經驗的影響下,逐漸 發展以目標導引的方式解釋他人的動作。首先,Woodward (1998)呈現給嬰兒系 列的動作事件:動作者(手或棒子)循特定的路徑,從兩個物體間,重複地抓取(手) 或碰觸(棒子)其中一個物體。當習慣化產生後,交換物體的位置,一半的受試者 觀察動作者經新的路徑與舊的目標作用,另一半的受試者觀察動作者循舊的路徑 與新的目標作用。結果發現,只有在手抓取物體的情境,嬰兒才對舊路徑新目標 的測試事件產生去習慣化,顯示在習慣化過程中,嬰兒表徵重複被抓取的物體為 手的目標,棒子的行經路徑雖然與手臂相似,並不能引發嬰兒解讀物體為目標。 Woodward 進一步在棒子終端加上擋片,模擬抓取物體時手與物體之間的重疊, 或是加上鉗子,模擬手與物體間的互動,探討在手的情境中,物體的知覺醒目特 質與手的動態特徵是否影響嬰兒的注視偏好,結果發現嬰兒對手的抓取最敏感, 其它附加線索並不能導引嬰兒歸因目標予棒子。 Guajardo 與 Woodward (2004)進一步指出抓取動作含有的目標訊息與手本身 的表面屬性有關。當戴手套的手在兩個物體間抓取特定的物體,皮膚特質被遮蔽 後,嬰兒知覺目標改變的能力顯然受阻。然而,如果事前知道動作者的手戴上手 套,或動作者的身體和戴上手套的手同時在習慣化事件中呈現,嬰兒可以解釋戴
2
手套的抓取為目標導引的動作。此外,嬰兒亦能從手與物體的互動辨識意圖線 索。當手背無目的的碰觸物體時,注視新目標與原目標事件的時間沒有明顯差異 (Woodward, 1999)。然而,直到 1 歲左右,嬰兒才開始表徵指向的物體與動作者 間的意圖關係(Woodward & Guajardo, 2002),因為 9 至 12 個月間嬰兒開始發展使 用指向手勢(point gesture),Woodward 與 Guajardo 認為在指向線索下,知覺動作 目標變化顯然與嬰兒自身使用指向手勢的經驗有關。
Somerville, Woodward 與 Needham (2005)進一步探討動作經驗與目標知覺的 發展關聯。Sommerville 等允許小孩預先探索測試的玩具,給嬰兒戴上縫魔鬼氈 的手套,鼓勵其伸手碰觸玩具,手套因此黏住玩具,持續一段時間後,接著才進 行習慣化的程序,觀察抓取的動作。Sommerville 等發現動作經驗明顯地改變 3 個月大的嬰兒對抓取動作的解釋,預先操弄物體的嬰兒比沒有此經驗的嬰兒更能 知覺到抓取的目標的改變。在另一個研究中,Sommerville 與 Woodward (2005) 以拉布作業(cloth-pulling task),探討目標知覺與解決問題能力的關聯。習慣化事 件包括:動作者從兩條方巾間,重複地將特定一條拉向自己,取得置放在方巾另 端、手抓取不到的玩具。習慣化產生後,交換物體的位置,一半的受試者觀察動 作者拉原來的方巾取得新玩具,另一半的受試者觀察動作者移動新的方巾取回原 先取得的玩具。結果發現,12 個月的嬰兒對玩具的改變產生去習慣化,顯示其 表徵結果(而非過程)為問題解決的目的。10 個月組的反應雖較不明顯,但那些在 拉布作業上問題解決企圖愈明顯的嬰兒,在注視作業中愈能察覺到動作者的目標 改變。 無疑的,Woodward 與同僚的研究發現強力的支持經驗基礎論對目標表徵能 力發展的看法。目標表徵不僅與動作發動性(agency)有關(生命 vs.無生命),也與 動作的功能性、及嬰兒對此動作的熟悉度有關。基本上,如觀察的行為是嬰兒勝 任的技能,最有利於目標導引的知覺。此外,動作經驗可在短暫的時間內,誘使 嬰兒歸因目標予不熟悉的動作。這些研究發現指出動作觀察和動作執行可能源自 共同的機制,此機制在發展的過程中以經驗為基礎,因此選擇性地只對人的動作 敏感,此層意義與當代備受矚目的鏡子神經元系統理論正好不謀而合(Blakemore & Decety, 2001; Gallese & Goldman, 1998)。
另一方面,有關模仿的研究資料顯示解讀動作意圖在嬰兒的模仿表現扮演重 要的角色,在 14-18 個月間,當示範者呈現未完成的嘗試,嬰兒並不只是拷貝觀 察的失敗動作,他們偏好重演大人意圖但未完成的動作結果(Meltzoff, 1995)。物 體導向的模仿能力(object-related imitation)尚未發展前,嬰兒是否已能在知覺上解 讀或歸因目標予未完成的動作呢?近來一些研究者已嘗試用不同的方法探討此 議題。Daum, Prinz 與 Aschersleben (2008)在電腦螢幕上呈現未完成的抓取,畫面 暫停後,緊接著在另外兩個電腦螢幕上呈現兩種結果狀態:一為動作者抓取預期 的玩具(合理的結果),另一為動作者抓取非預期的玩具(不合理的結果)。Daum 等 發現 6 個月及 9 個月的嬰兒皆偏好注視後者,因為動作者抓取的玩具與他們預期 的目標並不一致。他們同時排除嬰兒對目標的預期係受到手的行進方向影響,從 行進方向預測落點,然而,嬰兒或許並不是透過解讀目標,而是從手行進的方向 預期其最終的落點點。在第二個實驗,呈現的未完成的抓取係從嬰兒自我中心的 角度(egocentric perspective)拍攝,與實驗一不同的是嬰兒並沒有偏好注視不合理 的結果,由於在兩個實驗中,影片皆包含手的行進方向線索,而在實驗二嬰兒的 表現反而較差,顯示是拍攝角度(而非手的行進方向)影響嬰兒解釋未完成的抓取
3
的動作目標。在實驗三,Daum 等探討拍攝角度對解讀目標的影響,證實只有從 他人中心的角度(allocentric perspective)觀察影片時,嬰兒才偏好注視不合理的結 果。
Hamlin, Hallinan 和 Woodward 以物體選擇偏好探討嬰兒知覺未完成的抓 取。如同在 Woodward (1999)的實驗情境中,7 個月的嬰兒觀察示範者在兩個物 體間伸手抓取其中一個物體,或者僅以手背碰觸物體,之後當嬰兒有機會探索兩 個物體時,Hamlin 等發現觀察抓取動作組比觀察手背碰觸組更偏好選擇示範者 作用的物體。在第二個實驗,他們比較嬰兒觀察失敗抓取或指向手勢後的物體選 擇,結果發現前組比後組偏好示範者預期的物體,顯示嬰兒 7 個月大時已能將失 敗的抓取解釋為目標導引,即便僅呈現靜止的最終狀態,不使嬰兒有機會觀察伸 手移動的過程,他們似乎仍能解釋預設的物體為失敗抓取的目標。
解讀目標的證據亦來自嬰兒的前向性眼動(proactive eye movements)。當嬰兒 注視一個移動的物體,如果預先知道物體的終點,嬰兒的眼跡應該不只是被動地 追蹤物體,而能在物體到達前預先注視終點目標,即預測目的的注視反應。 Falck-Ytter, Gredebäck 和 Hofsten (2006)利用眼跡追蹤儀(eye tracker)呈現給 6 個 月、12 個月的嬰兒及大人受試者錄製的影片,影片中,動作者逐一拾起桌面的 三顆球放入位於另一端的圓筒。Falck-Ytter 等分析眼球移動的軌跡,及在畫面上 不同區塊停留的時間,發現:12 個月的嬰兒比 6 個月的嬰兒花更多時間注視圓 筒區域,且偏好在球尚未落入圓筒前,提前注視圓筒,12 個月組的反應形式與 大人組非常相似,顯示 1 歲左右時,嬰兒已能在觀察動作時預期動作的結果。當 動作者坐著不動,球自己驅動從桌面升起,移動至圓筒內,或觀察機器產生的球 體運動,12 個月的嬰兒與大人並不偏好注視圓筒區域,也沒有前向性的眼動反 應。顯示自我驅動的物體或機器產生的運動,無法引起嬰兒歸因目標,目標導引 的知覺起因於人發動的動作。 在最近的研究中,我們修訂 Falck-Ytter 等的實驗程序,追蹤 8 個月的嬰兒 在物體選擇情境的眼動反應(Huang & Chen, 2009)。嬰兒觀察一串自我驅動的珠 子從螢幕的左、右方隨機出現,從桌面上兩個不同的容器間,選擇並落入其中一 容器(物體動作者組),或是上述的動作由人的手完成(人動作者組)。動作事件重 複 8 次。另根據動作者的出現方向與目標容器的相對位置,動作者各有 4 次經短 路徑與長路徑到達目標容器。研究結果發現:當動作者經長路徑時,嬰兒在人動 作組尋找目標容器所花的時間明顯少於物體動作組,這是因為觀察期間後組花較 多時間注視物體的運動軌跡。同時,在長路徑情況中,人動作者組亦較物體動作 者組更常產生前向性的眼動,顯示當有充裕的時間觀察動作者行進,嬰兒偏好解 釋人的動作為目標導引。而在短路徑嘗試中,動作者行進的時間相當短暫,嬰兒 或許來不及形成預期,因此眼跡往往在珠子掉入杯子後才延遲到達。與 Falck-Ytter 等及 Woodward 與同僚的結論相似,我們的研究發現提供經驗基礎論 的證據。 為了解釋在社會情境中,高等動物如何推論行為者與結果之間的關係,近來 神經科學家認為在演化過程中,大腦演進出獨特的神經機制,負責解讀有關行為 目標的訊息(Perrett, Harries, Bevan, Thomas, Benson, Mistlin, Chitty, Hietanen, & Ortega, 1989)。研究者已在猴子的腦內發現不同的神經元系統,針對抓、戳和撕 等動作,產生區別的反應(Emery & Perrett, 2000)。例如,研究者發現:猴腦內 F5 區的神經元(與人腦 Broca 區對應的區域),同時對觀察及模仿抓取物體的動作產
4
生活躍,被稱為鏡相神經元(Fadiga, Fogassi, Pavesi, & Rizzolatti, 1995; Gallese, Fadiga, Fogassi & Rizzolati, 1996;Rizzolati, Fadiga, Fogassi & Gallese, 1996a; Rizzolati, Fadiga, Matelli, Bettinardi, Perani, & Fazio, 1996b;Iacoboni, Woods, Brass, Bekkering, Mazziotta, & Rizzolatti, 1999)。活化鏡相神經元的必要條件是手與物體 的直接互動,當物體或手勢單獨呈現、或是透過中介工具與物體互動(如手拿鑷 子夾取物體)時,並無法引發其活躍。由於目標知覺的早期發展受限於經驗及人 的動作,對自我驅動的物體並不敏感,上述我們回顧的文獻似乎支持鏡相神經元 系統(mirror neurons system)在社會認知的發展中扮演編碼目標的角色。
線索基礎論(cue-based theories)
然而,根據目的論立場論(teleological stance theory)或線索基礎論(cue-based theory)的看法,決定嬰兒歸因目標的必要條件不一定總是人動者發動的行為,任 何動作者(包含人與物體)的行為只要其行為明顯導向特定的結果或是符合理性 的計算(Biro, Csibre & Gergely, 2007; Gergely & Csibra, 2003),都可能被知覺為具 目標導引的特性。與經驗基礎論相形之下,目的論立場論認為解讀意圖的能力係 超越嬰兒自身執行動作的經驗。例如,在最近的研究中,Biro 與 Leslie (2007)質 疑嬰兒在 Woodward (1998)的實驗情境無法歸因棒子的目標,是否起因於目標線 索不足,以致嬰兒無法使用多重線索解讀棒子的行為。他們認為棒子在習慣化事 件行經固定的路徑,小孩無法使用 equifinality 線索解讀棒子的行為目的,他們 採取熟悉化(familiarization)的實驗程序,讓嬰兒觀察棒子循不同的路徑出現,且 每次接觸物體的不同部位,結果發現當兩個物體的位置交換,棒子接觸的物體改 變時,6 個月的嬰兒可以察覺目標的變化。目標線索同時包括動作效果與自我驅 動性。Biro 與 Leslie 認為在 Woodward 的研究中,手抓取物體或棒子碰觸物體後, 物體並沒有產生位移,缺少可以讓小孩解釋行為合理性的效果訊息,同樣地棒子 的自我驅動性在實驗情境中並沒有被強調出來。當棒子使物體產生明顯位移(如 黏住、向上提起物體,使其離開基座),或是動作開始前,強調物體的自我驅動 特性(如棒子上下左右運動),他們發現這些線索可以引導嬰兒歸因目標予物體動 作者,即便不是嬰兒熟悉的動作、或是超出嬰兒能力所及的動作。
相似地,Kiraly, Jovanovic, Prinz, Aschersleben 和 Gergely (2003)認為在 Woodward (1999)的研究,手背碰觸物體並非是無目的的動作,而是此動作未伴 隨有動作效果,因此無法鼓勵嬰兒解讀物體為手背的目標。當碰觸物體後,手背 使物體產生位移,他們發現 8-10 個月的嬰兒能可靠地分辨舊目標/新路徑與新目 標/舊路徑事件,顯示動作效果影響嬰兒是否以目標導引的形式解讀動作者與物 體之間的關係。Hofer, Hauf 和 Aschersleben (2005)以鉗子來代替手背,碰觸並使 物體產生位移,發現 12 個月(而非 9 個月)的嬰兒能夠解釋鉗子與物體之間的關 係為目標導向。然而,如果習慣化程序開始前,先給嬰兒機會觀察大人操作鉗子, 能夠讓 9 個月的嬰兒更願意歸因目標予鉗子作用的物體,顯示經驗似乎能夠促使 嬰兒偵測與目標有關的效果訊息。 這種運用線索、推論目標的彈性策略,不只影響嬰兒解釋人和物體的現場行 為,甚至影響他們知覺平面圖形在螢幕上的移動路徑。在一個著名的研究中, Gergely,Nadasdy,Csibra 和 Biro (1995)在電腦螢幕上呈現一大一小的兩個 圓,中間被一長方形隔開,在習慣化階段,小圓向大圓移動,到達長方形障 礙物時便停下,回到起點後,再次向大圓移動,這次小圓躍過障礙物,與大
5 接觸。達到習慣化後,中間的障礙物移至右邊,在測試階段,嬰兒觀察小圓 以兩種不同的路徑向大圓移動:在合理的路徑中,小圓採取直線的路徑到達 大圓;在不合理的路徑中,小圓重複習慣化階段的動作,到達中線(此時已無 障礙物)稍稍停頓後再躍起。Gergely 等發現12 個月的嬰兒花較多時間注視不 合理的路徑,雖然此路徑是他們先前所熟悉的,顯然嬰兒瞭解障礙物移除後,接 近大圓的最合理方式是直線路徑。Gergely 認為嬰兒歸因動作的發動性予小圓, 並在合理性的計算下,為小圓的動作找到心理上的肇因,因此解釋人與物體行為 的心理架構皆是基於合理性的考量。
Kamewari, Kato, Kanda, Ishiguro 與 Hiraki (2005)延伸 Gergely 等(1995)的典 範,探討動作者的形態是否影響 6 個月的嬰兒解讀目標導向的動作。嬰兒觀察螢 幕上的人、人形機器人、或木盒等不同形態的動作者,經過不同的路徑到達房間 特定的位置。在習慣化階段,動作者與終點之間隔著一個箱形障礙物,因此動作 者必須繞道才能到達終點位置,三組的嬰兒分別觀看動作者繞過障礙物到達目標 的影片。習慣化後,將障礙物移開,嬰兒觀看動作者直行至目標終點(合理的路 徑),或是重複先前繞行的路徑(不合理的路徑)。結果發現:當人與人形機器人 重複不變的路徑時,最吸引嬰兒的注意力,顯示嬰兒認為一個具有內在心智活動 的動作者,應該選擇最有效達到目標的策略,當直行最短路徑上已無障礙物時, 嬰兒似乎認為繞道而行不是合乎理性原則的行為。另一方面,機器人的動作對大 多數嬰兒而言是斬新經驗,可見目標歸因不一定必須依賴人發動的動作。 然而,嬰兒對木盒的行為不敏感,是否因嬰兒選擇性地歸因目標予具有人形 特徵的動作者(human-like creatures)呢?Csibra (2008)認為在盒子的情境中,盒子 每次都繞行相同的路徑抵達目標,缺少行為的變異性(equifinality)線索誘引嬰兒 探索盒子的發動性。Csibra 修正 Kamewari 等的盒子事件,使盒子在習慣化階段 繞經不同的路徑到達目標,發現 6 個月的嬰兒能夠使用行為變異性解釋路徑與目 標之間的關係,因此強烈的主張嬰兒依賴多重線索來解讀不同動作者的行為,此 種解讀能力獨立於經驗,是一套使用線索推論目標的解釋動作系統。 由上可知,研究者對於目標歸因的發展本質,尚未有共識。由於目標歸因對 於探索早期社會認知發展是項極重要的研究主題,為了解決經驗基礎論與線索基 礎論(目的論立場論)之間的爭議,未來研究有必要繼續澄清嬰兒解讀不同動作者 的行為的心理歷程。
6
第二章 實驗 1-1
嬰兒在一歲前已能使用不同的社會訊息解讀他人的動作意圖,這些社會性認 知技能,包括注視追隨(gaze-following)、指示性手勢(pointing)及模仿學習等能 力,被認為是發展心智理論的前驅能力(Carpenter, Nagell, & Tomasello, 1998)。釐 清解讀意圖能力的本質及其發展路徑,有助於我們瞭解生命早期嬰兒如何發現人 類行為與外在世界的因果知識,並透過這些知識學習與他人互動,是社會認知神 經科學(developmental social cognitive neuroscience)領域裡備受矚目的研究課題。
前向性眼動(proactive eye movements)最近被認為是嬰兒解讀意圖的新證 據。當物體沿某個方向行進時,如果嬰兒能預測動作目標,應該在物體到達終點 前預先注視目標結果,而不只是被動地追蹤動作軌跡。例如,Falck-Ytter, Gredebäck 和 Hofsten (2006)使用眼跡偵攝儀追蹤 6 個月、12 個月的嬰兒和大人 觀看一動作者將球投入容器的注視反應,他們定義容器為動作的目標區域(area of interest),發現:12 個月的嬰兒比 6 個月的嬰兒花更多時間注視目標區域,同時 偏好在球尚未進入容器前,提早注視此區,12 個月組的注視反應與大人組相似, 顯示 12 個月左右時,嬰兒已能從觀察中預測動作者的目標。當動作者坐著不動, 觀察球自發動進入容器內內,或是觀察機械化的球體運動,12 個月的嬰兒與大 人並不偏好注視目標區域,前向性的眼動反應亦不顯著。自發動的物體和機械化 的運動,並不能引起嬰兒的預測反應,顯示目標知覺具有選擇性,與動作是否由 人產生有關。 在最近的國科會研究計畫中,筆者修訂 Falck-Ytter 等的實驗程序,追蹤 8 個月、12 個月和 17 個月的嬰兒觀察物體選擇事件的注視反應(Huang & Chen, 2009)。嬰兒觀察一串珠子自發動地自左或右方隨機出現,從兩個不同造型的容 器間,選擇並落入其中一個容器(物體動作者組),或是上述動作由人的手完成(人 動作者組)。動作事件重複 8 次嘗試,根據動作者的出現方向與目標容器的相對 位置,動作者各有 4 次由短路徑(直接到達目標,未經非目標容器)與長路徑(經非 目標容器,再到達目標)呈現動作結果。結果發現:整體而言,預測效率隨著年 齡增加,但人動作者組預測目標的潛伏期較快速,與物體動作者組相較下,同時 花較少時間注視運動路徑。與 Falck-Ytter 等及 Woodward 與同僚的發現相似,嬰 兒的預測目標受惠於人引發的動作。然而,當分析嬰兒對落點的初始預期,發現: 不管經由短路徑或長路徑,8 個月組偏好在動作開始時注視相對於動作者起點較 遠的落點,18 個月組則偏好注視相對於動作者起點較近的落點;整體而言,手 動作組比物體動作組較常注視遠端的落點。 一個可能的解釋或許是:8 個月組的預測目標較依賴拋擲路徑的線索,依據 拋擲路徑的原理,落點通常與運動起始點間隔一段相當的距離,因此與近端物體 對照之下,遠端容器似乎是較合理的落點位置。相形之下,為了快速預測,18 個月組似乎較依賴動作者行經物體時立即的時空關係,選擇最先經過的物體,此 策略在長路徑情況中雖容易導致錯誤選擇,並不影響預測效率,他們仍可用比 8 個月組相對較短的潛伏期注意到目標區域,顯示他們同時能快速地修正錯誤。 另一方面,手動作比物體動作更常引起注視遠端容器的偏好,或許意味手比 自發動物體更易於提示拋擲路徑的線索,引導嬰兒在初始反應注視拋擲路徑的終 點(即相對較遠的物體)。然而,如果手提示拋擲路徑的線索,如何解釋:整體言 之,手比自發動物體更容易引致預測注視?以及觀察自發動物體比觀察手使嬰兒
7 花更多時間注視動作過程?一個可能性或許是:在手引發的動作事件中,手臂漸 次伸出,停留在畫面上,並未消失,具有標誌經過路徑的作用,嬰兒可能以手臂 為定錨估計未完的路程,對落點的預測因此較有效率;而在自發物體的事件中, 經過的路徑並沒有視覺標誌,嬰兒可能更需依賴物體運動判斷落點位置,因此花 較多時間注視珠子的運動路徑,導致預測落點的時間延長。如果上述假設成立, 手事件引起之預測落點的相對效率未必能簡單地歸因於解讀目標所致,因為拋擲 路徑與視覺定錨等其他線索可能提供更簡約(parsimonious)的解釋選項。 實驗一探討在手產生的動作事件中,手臂是否提供定錨角色。我們設計一隻 具有手掌及手指特徵的布手,比較人手與布手產生的動作事件是否引發的注視反 應是否不同。如果在我們先前的研究中,嬰兒的預測目標受惠於人的手(而非自 發動物體),係由人的手包含內在的意圖訊息,依據經驗基礎論,對於預測目標 效率的影響,人手應該比布手更佔有優勢,換言之,嬰兒花於注視後者行經路徑 的時間應該相對較多。反之,如果嬰兒以手臂為定錨標記行經路線,預測動作落 點,人的手與布手對於預測目標效率的影響應該相當,且不會影響初始的物體選 擇偏好。
第一節 研究方法
受試者 受試者為 48 名 7-8 個月的嬰兒(22 位男生,26 位女生,M = 8.29 個月,SD = 0.29 個月,以下稱 8 個月組)。受試者皆為足月產,未有已知的身心障礙,其中 有 21 位,因對影片沒興趣或分心而無法配合坐在螢幕前完成測試,致資料無法 採用。 實驗儀器本研究使用無線式眼跡偵測儀(Tobii 1750; Tobii technology)播放實驗影片, 並紀錄嬰兒的注視反應。眼跡偵測儀外觀為一台為 17 吋的液晶顯示器,螢幕四 周有五個擬紅外線光源的 LED 燈泡,作用為增亮受試者瞳孔反射的光線,一隱 藏式的攝影機內建在螢幕下方的中央位置,功能在於偵測雙眼瞳孔的移動與虹膜 反射的光線,這些收錄資料傳回工作站的電腦後,研究者可使用影像運算處理程 式(ClearView 2.5.1; Tobii technologies)來計算眼球移動的過程,估算受試者在螢 幕上的注視停留位置與注視時間。 攝影機的最佳攝影範圍為距螢幕前方 60-80 公分處,攝影機上緣有效的偵攝 範圍為+/-40 度角,下緣有效的範圍為+/-10 度角。因此正式實驗時需要家長協助 維持小朋友的坐姿在攝影範圍內。 實驗材料 實驗影片皆為事先錄製好並在眼跡偵測儀上播放。影片一開始先有白板放下 來,桌面上左右邊各放有一個新奇的容器,其中一容器為娃娃的圖案,以紅白為 主色系,在螢幕上高 8.3cm,寬 4.5cm,另一容器則是小熊的圖案,以橘綠為主 色系,高 8cm,寬 5cm,兩容器相距 8cm,背景為素面的淺色牆壁,過程中有一 串全紅色長 7.5cm 的珠子會從畫面的左方或右方出現。受試者以隨機方式分配到 兩種不同的實驗情境影片中─人手動作組及布手動作組。(見圖一) 在布手動作組中,白板打開後,靜止畫面呈現兩秒會有一段提示鈴聲響起,
8 接著有一布製的手臂由畫面的的左方或右方隨機出現,並選擇將手上的珠子投入 特定的容器內,珠子消失約三秒後,白板又再度闔上。布手有兩個部份,手臂為 覆蓋著藍色不織布的長條水管;手掌與手指與人手相似,顏色為乳黃色。 在人手動作組中,白板完全放下呈現兩容器在桌上的靜止畫面約 2 秒後,受 試者會聽到口語的提示音「這邊」,接著有一人的手臂由畫面的的左方或右方隨 機出現,並選擇將手上的珠子投入特定的容器內,畫面上手臂仍停留在該容器上 方,約三秒後白板又再度闔上,嘗試事件結束。過程中,示範者的身體與臉並沒 有出現,手臂並無著衣袖或穿戴首飾。 由於示範者出現的位置相對於目標容器會有不同長短的距離,在行經短路徑 的事件中,珠子出現於畫面上至消失於杯中歷時約 3.29 秒;在長路徑的事件中, 珠子移動約 5.8 秒。每位受試者要看 8 次的嘗試事件,包含四次長路徑與四次短 路徑。每一次影片開始前都會有卡通動畫將小朋友的注意力引導回螢幕上,待確 認其注視點回到螢幕後才會播放下一段影片。 實驗設計 本實驗採受試者內與受試者間二因子混合設計。受試者內變項為路徑(短路 徑與長路徑),受試者間變項為動作者(布手動作者、人手動作者)。 實驗一包含兩組情境:布手示範組以及人手示範組。受試者隨機分派至其中 一組觀察情境,每個年齡組在每個實驗情境有 24 位受試者。在每個觀察情境中, 示範的動作會隨機由畫面的左邊或右邊出現並總是將珠子投入固定的容器中,由 於示範者出現的位置相對運行至目標容器會有不同長短的距離,因此移動的過程 又可分為長路徑與短路徑,每一種路徑皆會出現四次,一共有 8 次嘗試。此外, 兩個容器的位置及作為目標物的次數均經過平衡抵消的安排。 實驗情境 所有的受試者皆在家長的陪同下,至慈濟大學人類發展學系嬰兒認知實驗室 接受一對一的個別施測。受試者與家長初抵實驗室,實驗者與工作人員會先陪小 朋友在遊戲區進行一段 10 至 15 分鐘的暖身活動,同時與家長解說實驗程序,並 要求家長在實驗過程中避免以口語描述影片中動作或物體的名稱,另外,為了記 錄完整的眼跡資料,還須請家長協助維持小孩端正的坐姿。待家長充分了解實驗 內容後,我們會請家長填寫一份簡短的問卷及同意書。當小孩表現較自在,與實 驗者有簡單的互動(願意探索實驗者遞給他的玩具,或主動將玩具交給實驗者), 便引導家長和小朋友進入測驗室,進行正式實驗。 進入測驗室後,先安排家長抱著小朋友坐在螢幕前方,並調整至眼跡偵測儀 能捕捉小孩眼睛的最佳距離(螢幕前方約 60 公分的距離)。在正式實驗前,為了 正確紀錄眼睛相對於螢幕位置的觀看焦點,每位受試者皆須進行眼球校正的活 動,我們會在螢幕的五個位置(左上、左下、右上、右下、中央)隨機呈現卡通動 畫(伴有鈴聲的小黃鴨、跳動的貓咪圖案),吸引小朋友注視前方,待其雙眼資料 皆被程式判定為可接受後,方可進入正式的實驗階段。正式實驗的過程中,研究 人員會在螢幕播放預先錄製的實驗影片,觀看期間螢幕下方內建的眼跡偵測儀會 同時紀錄孩子注意力的焦點及注視時間。實驗過程大約 5~10 分鐘。實驗結束後, 會致贈受試者及家長一份玩具禮物與存有其參加實驗的照片光碟作紀念。
9 圖 1 實驗 1-1 的影片刺激 人手動作組 假手動作組 短路徑 長路徑 短路徑 長路徑 記分 根據事件中的元素我們將影片區分為三個階段─初始狀態、運動期間及結果 狀態。初始狀態包含從容器開始出現於畫面上到動作者出現前,期間畫面上只能 看到兩個新奇的容器的靜止狀態;運動期間則是從動作者開始出現於畫面中的 200 毫秒後,至珠子完全消失於目標容器內;結果狀態為珠子消失後直到白板完 全遮蔽兩容器為止。 為了分析比較受試者在觀看影片期間,注視不同容器及觀察珠子運行軌跡所 花的時間及反應模式,我們使用 ClearView 2.5.1 程式內建的功能定義了三個注視 興趣的區塊(areas of interest, AOI),分別為:目標區、非目標區、以及運動區。 目標區與非目標區個別圈畫出桌面上兩個新奇的容器,且兩區包含的範圍大小一 致;運動區則根據動作者運行過程中的端點決定長寬,亦即找出軌跡最高和最左 (右)側來決定範圍,三個區塊間並無重疊的部份。程式會根據我們劃定的範圍 內,輸出影片播放時所有落入注視興趣區域的注視點資料。特別要注意的是,只 有在運動期間與結果狀態內才會看到動作者(布手或人手)運行的過程,因此需要 畫出運動區的範圍,然而在初始狀態中並無法看到運動軌跡,故此階段並無定義 運動區。(見圖二) 在進入資料分析前,本研究在有效的眼跡資料篩選上有三點標準。第一,注
10 視點(fixation)的時間必須持續達 200ms 以上;第二,運動期間開始時,亦即動作 者(布手或人手)出現的 200ms 後,受試者必須先注意到運動區才對目標區或非目 標區做選擇,以確保注視的過程有受動作者提供的訊息影響;第三,在整個動作 期間內,注視時間須大於該次嘗試所有受試者之平均注視時間減二個標準差以 上。由於近端及遠端的影片在珠子移動的時間上有顯著的差異,p < .001 (Mann-Whitney U),近端(M = 3.29s, SD = 0.03s);遠端(M = 5.80s, SD = 0.03s), 是以下列的資料分析會分別呈現近端及遠端的結果。近端與遠端嘗試的有效資料 各需達三次以上才會被納入分析中。 實驗 1-1 有兩個分主要分析方式:近遠端嘗試的比較以及八次順序嘗試的比 較。第一個分析方式包含四個部份:分別為潛伏期(latency)、注視物體及運動路 徑的時間、預測性注視(lag)、運動期間與結果狀態內首次的物體選擇偏好。順序 分析則包括最初與最後三次注視物體及動作者的時間。下面將分別描述此五個資 料的定義與計算方式。 潛伏期(latency):當受試者注意到動作者(運動區)後,首次注視目標區所需 的反應時間。計算方式是將首次注視到目標區的時間點減去運動期間的起始點。 注視物體及運動路徑的時間:受試者在運動期間與結果狀態內嬰兒注視目標 物、非目標物及運動路徑所花的時間比率。計算方式則是將運動期間與結果狀態 內嬰兒注視目標物、非目標物及運動路徑的時間分別除以嬰兒注視影片(運動期 間與結果狀態)的總時間。 預測性注視(lag):比較受試者注視到目標區的時間與珠子到達目標的時間差 異,因此又可分為預測性注視和延遲注視。我們將預測性注視定義為:受試者的 注視點在珠子到達目標區前即注意到目標;而延遲注視則定義為:注視點較珠子 到達目標區的時間來的晚。計算方式是將珠子接觸到杯口的時間設為比較基準 點,將注視到目標區的時間點與此基準點相減,若為正值則為預測注視,負值則 為延遲注視。 運動期間內首次的物體選擇偏好:我們關心的是運動期間內,受試者對兩個 物體的初始選擇偏好,因此不受限於注視點必須先注意到動作者的情況下。此計 算方式又分為兩種,其一先算出首次物體選擇反應中偏好注視為目標物的比率; 第二種則是算出對其落點的偏好,又可分為「近端偏好」與「遠端偏好」。在短 路徑情境中,由於動作者出現的位置從與目標物位於同一邊,並不經過非目標 物,如嬰兒初次選擇的物體為目標物,記為「近端偏好」,如初次選擇的物體為 非目標物,則為「遠端偏好」;相反地,在長路徑情境中,因動作者從目標物的 對側位置出現,初次選擇的物體為目標物或非目標物時,分別記為「近端偏好」 或「遠端偏好」。 最初與最後三次注視物體及動作者的時間:根據八次嘗試順序,計算受試者 於運動期間及結果狀態內注視三個區塊(目標區、非目標區及運動區)個別花費的 時間佔整體注視時間的比率。
11
圖 2
實驗 1-1 的注視興趣區塊(areas of interest, AOI)
人手動作組 假手動作組 短路徑 長路徑 短路徑 長路徑
第二節 結果與討論
首先,我們在不同長、短路徑的觀察嘗試中,分別比較嬰兒前 2 次與後 2 次觀看影片(運動期間與結果狀態)的平均注視時間,結果發現:觀看長路徑事 件,前 2 次(M = 7429, SD = 1784)的平均注視時間(ms)顯著大於後 2 次(M = 6422, SD = 1925),t (46) = 4.62, p < .001;觀看短路徑事件,前 2 次的平均數值(M = 5983, SD = 1243)雖大於後 2 次(M = 5779, SD = 1273),但差異未達統計顯著水準。 潛伏期(latency) 潛伏期指運動期間注意到動作者之後,首次注視目標區所需的時間。每一路 徑事件的 4 次觀察中,注視目標區的嘗試必須達 2 次以上,受試者的資料才會納 入分析。 雖然嬰兒對刺激的整體注視時間隨嘗試次數遞減,事前比較發現在路徑條件 中前 2 次和後 2 次嘗試的潛伏期並無差異,故接下來的分析未將順序列入組內變 項。表一與表二為兩組嬰兒在短路徑和長路徑嘗試中,注視目標區分別所需的平 均潛伏期。獨立樣本 t 檢定顯示動作者效果在短、長路徑嘗試中皆未達統計顯著 水準。無論是布手或人手將珠子投入目標容器,並不影響嬰兒注意目標的時間。 雖然潛伏期的組間差異不顯著,整體而言,在短路徑嘗試中,人手組注視目 標區的嘗試比率(M = .86, SD = .20)高於布手組(M = 67, SD = .23),t (42) = 2.90, p = .006;在長路徑嘗試中,兩組注視目標區的嘗試比率則無差異,M (SD)分別 是:.90 (.17),人手組,和.90 (.25),布手組,t (45) < 1。另一方面,在短路徑嘗12 試中,人手組和布手組分別有 12 和 31 嘗試次被記為未注視目標,其中分別有 55%和 83%的嘗試次係因只注視非目標容器,45%和 17%因為沒有產生物體選擇 反應(只觀看動作路徑)。在長路徑嘗試中,人手組和布手組分別有 10 和 11 嘗試 次被記為未注視目標,其中分別有 64%和 60%的嘗試次係因只注視非目標容器, 36%和 40%因為沒有產生物體選擇反應。 表 1 實驗 1-1:珠子經短路徑到達目標,嬰兒注視目標所需的潛伏期(ms) 組別 人數 M (SD) 人手組 23 3219 (905) 布手組 20 3528 (672) 表 2 實驗 1-1:珠子經長路徑到達目標,嬰兒注視目標所需的潛伏期(ms) 組別 人數 M (SD) 人手組 24 3323 (1102) 布手組 23 3858 (1477) 目標區、非目標區及運動路徑的注視時間 人手與布手對預測目標潛伏期的影響相似,並未排除另一個可能性:如果人 的動作有利於目標解讀,觀察人手移動時,是否比觀察布手移動時,花相對較多 時間注視目標區?由於運動與結果狀態期間,動作者與目標物和非目標物同時呈 現在監視器畫面上,接下來將分別分析在這段期間內嬰兒注視目標物、非目標物 及運動路徑所花的時間。 表二是不同動作者經由短路徑將珠子投入目標容器,在前二次和後二次嘗 試,嬰兒於運動期間內注視運動路徑、目標和非目標所花的時間。2 (動作者) × 3 (注視區域) × 2 (嘗試順序)混合型 ANOVA 發現注視區域效果達統計顯著水準, F (2, 41) = 42.99, p < .001。注視區域和動作者的交互作用亦達統計顯著水準,F (2, 43) = 3.27, p = .048。整體而言,注視運動路徑的時間遠多於注視目標或非目標的 時間,分別是:t (43) = 8.11, p < .001 及 t (43) = 9.23, p < .001;後二者間的差異 達邊緣顯著,t (43) = 1.76, p = .086。進一步分析交互作用:人手組注視目標的時 間明顯多於布手組,t (42) = 3.02, p = .004;運動路徑或非目標的注視時間,並沒
13 有發現顯著的組間差異,兩者皆為 t (42) < 1。 表三是不同動作者經由長路徑將珠子投入目標容器,在前二次和後二次嘗 試,嬰兒注視運動路徑、目標和非目標所花的時間。2 (動作者) × 3 (注視區域) × 2 (嘗試順序)混合型 ANOVA 發現嘗試順序和注視區域的主要效果、及兩者間的 交互作用達統計顯著水準,分別是:F (1, 45) = 12.19, p = .001; F (2, 44) = 56.00, p < .001;及 F (2, 44) = 6.42, p = .004。整體而言,注視運動路徑的時間遠多於注視 目標或非目標的時間,t (46) = 4.83, p < .001 及 t (46) = 10.14, p < .001;注視目標 的時間又多於注視非目標的時間,t (46) = 5.46, p < .001。 整體而言,雖然嬰兒在前二次比後二次嘗試花較多時間注視影片,分析交互 作用,發現目標和運動路徑的注視時間隨嘗試次數增加而減少,t (46) = 5.81, p < .001 及 t (46) = 4.42, p < .001;非目標的注視時間並沒有明顯變化。 表 3 實驗 1-1:經由短路徑時,運動過程中,路徑、目標及非目標的平均注視時間(ms) 前 2 次嘗試 後 2 次嘗試 組別 路徑 M (SD) 目標 M (SD) 非目標 M (SD) 路徑 M (SD) 目標 M (SD) 非目標 M (SD) 人手 2340 (812) 1123 (602) 623 (528) 1990 (818) 1175 (895) 637 (665) 布手 2147 (741) 698 (465) 780 (553) 2206 (1004) 644 (469) 671 (604) 表 4 實驗 1-1:經由長路徑時,運動過程中,路徑、目標及非目標的平均注視時間(ms) 前 2 次嘗試 後 2 次嘗試 組別 路徑 M (SD) 目標 M (SD) 非目標 M (SD) 路徑 M (SD) 目標 M (SD) 非目標 M (SD) 人手 3108 (1247) 1798 (1231) 720 (644) 2328 (1245) 1824 (1496) 760 (722) 布手 2941 (1001) 1320 (663) 650 (683) 2465 (912) 1295 (1164) 608 (725)
14 目標預測與珠子到達的時間差(lag) 為了探討在動作完成前,嬰兒是否預先偵測目標落點,接著分析嬰兒注意到 動作者後,首次注視目標區的時間,是否提前或延後於珠子到達目標容器的時間。 表四和表五分別是不同動作者經由短路徑或長路徑將珠子投入目標,嬰兒首 次注視目標與珠子到達目標的平均時間差異。此處分析的資料為注意到動作者 後,首次注意目標區的注視點,篩選標準與分析潛伏期相同,注視目標的嘗試需 達 2 次以上,才會進入分析。單一樣本 t 檢定評估時間差異是否顯著大於或小於 0,結果顯示:在短路徑嘗試中,布手組預測目標的時間較珠子到達目標的時間 延遲,t (19) = 2.65, p = .016;人手組預測目標的時間與珠子到達的時間沒有差 異。在長路徑嘗試中,二組皆提前預測目標落點,人手組,t (23) = 10.13, p < .001, 布手組,t (21) = 5.18, p < .001。 事實上,在長路徑嘗試中,珠子到達目標所需的時間,比行經短路徑更費時, 兩組嬰兒皆提前預測目標,或許是有較多時間偵測目標有關線索,即便一開始選 擇錯誤的物體,仍來得及在珠子落下之前完成修正。為了與短路徑嘗試的時間差 異比較,進一步將長路徑嘗試中珠子到達目標區的時間,校正為動作者離開近側 物體(非目標)的時間,與嬰兒注視目標的時間相減,為校正後的時間差異(見圖三 及表五)。單一樣本 t 檢定分析在長路徑嘗試中,校正後的時間差異是否顯著大 於或小於 0,發現二組皆在動作者經過近側非目標之後才注視遠側的目標,布手 組,t (23) = 6.78, p < .001,人手組,t (21) = 7.02, p < .001。顯示嬰兒很少在動作 者未通過近側非目標之前就預測目標。 圖三 實驗 1-1:動作者移動路徑示意圖 短路徑 長路徑 長路徑(校正後)
15 表 5 實驗 1-1:經由短路徑時,嬰兒初次注視終點物體與珠子到達終點物體的平均時 間(ms)差異 組別 人數 M (SD) 人手 20 -235 (825) 布手 20 -397 (670) 註 排除注意到動作者後無選擇物體反應的嘗試後,四次嘗試中,有效嘗試須達 二次以上才納入分析 表 6 實驗 1-1:經由長路徑時,嬰兒初次注視終點物體與珠子到達終點物體的平均時 間(ms)差異 組別 人數 M (SD) M (SD)_corrected 人手 24 2280 (1103) -1471 (1063) 布手 22 1628 (1473) -2101 (1403) 註 排除注意到動作者後無選擇物體反應的嘗試後,四次嘗試中,有效嘗試須達 二次以上才納入分析 初始的物體選擇偏好 為了探討預測目標效果是否反映在嬰兒初始的注視偏好,我們接著分析運動 期間內,不論是否注意到動作者,在首次注視的物體中,目標或非目標區域的比 率是否顯著高於隨機。 表五表示行經短路徑與長路徑時,不管是否注意到動作者,在運動期間內初 次的物體選擇中,偏好注視目標物的比率。運動期間內,若嬰兒沒有注視任何物 體或注視影片的時間未達門檻,此嘗試不會被納入分析。篩選後,在各路徑嘗試 中,達門檻的嘗試至少 3 次以上(含 3 次),且注視物體的嘗試至少 2 次或以上, 受試資料才會進入分析。 以單一樣本 T-test 檢定注視偏好是否顯著大於隨機機率(P = .5),結果顯示: 在短路徑嘗試中,人手組與布手組皆未表現明顯的選擇偏好;在長路徑嘗試中, 人手組未表現明顯的選擇偏好,相較於非目標,布手組明顯偏好注視位於遠側的 目標,t (22) = 3.66, p = .001。在短路徑嘗試中,由於動作者出現的位置從與目標 位於同一邊,從不經過非目標,我們將嬰兒初次注視目標的反應,註記為「近端 偏好」,初次注視非目標的反應,註記為「遠端偏好」;相反地,在長路徑嘗試中, 動作者從目標的對側位置出現,先經過非目標再到達目標,初次注視目標或非目
16 標的反應,分別註記為「遠端偏好」和「近端偏好」。從上述分析,同時亦支持 初始的物體選擇偏好與動作者的類型有關:當動作者為布手時,嬰兒傾向注視對 側的物體(即遠側的目標);當動作者為人手時,則無明顯的物置偏好。 表 7 實驗 1-1:經由短路徑時,運動期間內首次注視物體為目標或非目標的平均比率 組別 人數 目標 非目標 人手 21 .59 (.32) .41 (.32) 布手 23 .46 (.31) .54 (.31) 表 8 實驗 1-1:經由長路徑時,運動期間內首次注視物體為目標或非目標的平均比率 組別 人數 目標 非目標 人手 21 .55 (.33) .45 (.33) 布手 23 .71 (.28) .29 (.28) 最初與最後三次注視目標區、非目標區及運動路徑的時間 上述的四個結果分析中(包含潛伏期、注視物體及運動路徑的時間、目標預 測與珠子到達的時間和初始的物體選擇偏好),我們將八次嘗試根據長短路徑分 成兩組,每組包含四次嘗試,並比較長短路徑的差異。接著,為了瞭解嬰兒的注 視情形是否會隨著嘗試次數而產生變化,我們將不分路徑,按照八次嘗試影片播 放的順序進行分析。 運動期間與結果狀態中,動作者都有出現在監視器畫面上,為了解受試者是 否對重複的影片產生熟悉化,首先,依順序比較八次嘗試內嬰兒注視運動期間與 結果狀態的平均注視百分比(計算注視百分比的方式:真實的注視總時間 / 影片 的總播放時間)。我們在熟悉化事件的八次嘗試裡,找出最初三次與最後三次有 效資料進行聚集。篩選成為有效資料的標準為:整體注視比率須界於所有受試者 的注視平均加減二個標準差以內,此標準的資料形式為右偏態,故淘汰左邊的極 端值。表八為布手或人手組嬰兒最初與最後三次嬰兒注視運動時間與結果狀態的 整體時間比率。 2(動作者)×2(順序)ANOVA 發現順序的顯著效果,F (1,44) = 9.20, p =.004, 動作者的效果和及二者的交互作用未達統計顯著性。整體言之,嬰兒最後三次的
17 注視比率低於最初三次,顯示隨著影片播放次數增加,嬰兒對影片已漸漸熟悉。 表 9 實驗 1-1:不同動作組嬰兒最初與最後三次嬰兒注視運動期間與結果狀態的整體 時間比率 組別 人數 最初三次 最後三次 M (SD) M (SD) 布手組 24 0.62 (0.13) 0.57 (0.14) 人手組 24 0.68 (0.11) 0.61 (0.16) 接著將比較動作者與兩個物體同時呈現的期間(運動期間與結果狀態),受試 者注視目標、非目標與運動路徑的時間,是否具有順序差異(最初三次 vs.最後三 次)? 表九是布手或人手組的嬰兒在運動期間與結果狀態內,最初與最後三次注視 目標物、非目標物及運動路徑的注視時間比率。計算注視比率的方式:運動期間 與結果狀態內注視目標物或非目標物或運動路徑的時間 / 注視目標物、非目標 物及運動路徑的總時間。2(動作者)×2(順序)ANOVA 分析注視目標區的時間比 例,發現動作者的顯著效果,F (1, 46) = 4.67, p = .036,顯示嬰兒觀察人手事件 時花較多時間注視目標物。順序效果與交互作用皆不顯著。2(動作者)×2(順 序)ANOVA 分析注視非目標區的時間比例,動作者、順序效果及二者的交互作用 皆不顯著。 2(動作者)×2(順序)ANOVA 分析注視運動路徑區的時間比例,發現順序的顯 著效果,F (1, 46) = 4.69, p = .036,最後三次的注視時間顯著低於最初三次;動 作者效果不顯著。交互作用達邊緣顯著,F (2, 46) = 3.71, p = .06,使用相依樣本 T 檢定分別檢驗兩動作組嬰兒在最初與最後三次注視運動路徑的時間比率,結果 顯示:布手組無顯著差異,t (23) < 1;人手組的差異達顯著,t (23) = 3.07, p< .01 最後三次的時間顯著減少。 總結上述的統計結果發現:一、嬰兒注視目標物與非目標物的時間不會隨著 嘗試次數而改變,但注視運動路徑的時間則有顯著的減少,可能是嬰兒對移動的 動作者漸漸感到熟悉。二、注視目標物時,人手組的嬰兒注視時間顯著較長,或 許是人手較有助於引導嬰兒去注視目標物。 若嬰兒知道動作者的目標為何,即使因熟悉化使整體注視時間減少,嬰兒仍 會傾向注視目標物。但我們發現嬰兒注視運動路徑的時間顯著多於注視目標物與 非目標物的時間,這是否可能為聚光效果所造成?運動階段時,布手或人手會移 動至目標物上方,若有產生聚光效果,那麼嬰兒注視動作者與目標物的時間比率
18 皆應顯著高於非目標物。目前的統計結果顯示,即使嬰兒注視運動路徑的時間因 熟悉化而減少,但注視比率仍高於目標物與非目標物,且兩動作組嬰兒皆如此, 此部分支持聚光效果。 然而,統計結果也發現嬰兒注視目標物的時間並未顯著高於非目標物,且注 視比率亦未隨嘗試而增加;最重要的是,兩動作組嬰兒注視目標物的時間具有顯 著的差異,人手組顯著高於布手組。倘若聚光效果有發生,那麼兩動作組嬰兒注 視目標物的時間會相似,然結果並非如此,因此我們推測嬰兒有對目標物進行表 徵,特別是當動作者為人手時,較易幫助嬰兒形成目標表徵。 進一步分析嬰兒在運動期間與結果狀態內,最初與最後三次注視目標物、非 目標物及運動路徑的注視次數比率,如表十。2(動作者)×2(順序)ANOVA 發現, 注視目標物時,僅動作者效果顯著 F (1, 46) = 3.92, p = .054,人手組的注視次數 顯著大於布手組;順序與交互作用皆不顯著。注視非目標物時,無順序、動作者 效果,F (1, 46) <1,亦無交互作用。注視運動路徑時,順序與動作者效果皆不顯 著,交互作用達邊緣顯著 F (2, 46) = 3.72, p = .06,再使用相依樣本 T 檢定分別檢 驗兩動作組嬰兒最初與最後三次注視運動路徑的次數,結果顯示:布手組 t (23) = -1.90, p = .07,最後三次的注視次數增加但未達顯著;人手組則無顯著差異 t (23) < 1。 嬰兒的注視次數與注視時間比率的統計結果相符,我們發現嬰兒注視目標物 的時間與次數並未隨嘗試而增加,但人手組嬰兒注視目標物的時間與次數皆顯著 高於布手組,如同之前的推測當動作者為人手時,較易幫助嬰兒形成目標表徵; 注視非目標物時,嬰兒的注視時間與次數亦沒有隨嘗試而增加,且也無動作者差 異;在運動路徑部份,人手組嬰兒的注視次數雖無順序上的差異,但注視時間確 有顯著的減少,即隨著嘗試的增加嬰兒每次注視動作者的時間縮短了,顯見人手 有助於嬰兒產生熟悉化反應。 表 10 實驗 1-1:不同動作組嬰兒在運動期間與結果狀態內,最初與最後三次注視目標 物、非目標物及運動路徑的注視時間比率 組別 順序 人數 目標物 非目標物 運動路徑 M (SD) M (SD) M (SD) 假手動作組 最初三次 24 0.22 (0.12) 0.17 (0.09) 0.61 (0.15) 最後三次 0.23 (0.14) 0.16 (0.15) 0.60 (0.22) 人手動作組 最初三次 24 0.29 (0.14) 0.12 (0.09) 0.59 (0.18) 最後三次 0.32 (0.19) 0.18 (0.13) 0.50 (0.20)
19 表 11 實驗 1-1:不同動作組嬰兒在運動期間與結果狀態內,最初與最後三次注視目標 物、非目標物及運動路徑的注視次數比率 組別 順序 人數 目標物 非目標物 運動路徑 M (SD) M (SD) M (SD) 假手動作組 最初三次 24 0.26 (0.11) 0.20 (0.10) 0.54 (0.13) 最後三次 0.26 (0.13) 0.18 (0.14) 0.60 (0.22) 人手動作組 最初三次 24 0.31 (0.13) 0.14 (0.12) 0.52 (0.15) 最後三次 0.33 (0.14) 0.20 (0.12) 0.50 (0.20)
20
第三章 實驗 1-2
為了釐清目標知覺在注視偏好扮演的角色,實驗 1-2 將以模仿能力為效標, 探討目標注視時間與模仿能力之間的發展關聯。 過去研究發現嬰兒 3.5 個月時視覺注意力的個別差異能預測 8-12 個月時的再 認記憶,面對新刺激時,注視最久一次的時間越短越具有回憶優勢,顯示分析注 視時間可透露訊息處理的效率(Courage, Howe & Squires, 2004)。依循相同的邏 輯,實驗 1-2 安排 8 個月時參加實驗 1 的嬰兒,於 12 個月時重返實驗室接受模 仿能力的評量,探討 8 個月時注視偏好的個別差異是否能預測其 12 個月時的模 仿表現,如果注視偏好透露孩子解讀目標能力的差異,我們很好奇早期測得的差 異是否持續地影響孩子之後在其他社會性認知能力的表現(如模仿)? 由實驗 1 可知,動作者與路徑因素影響注視目標的偏好,實驗 1-2 根據孩子 在短路徑嘗試中注視目標的平均時間,將受試者進一步區分為短目標注視時間與 長目標注視時間組,比較目標注視時間的差異是否能有效預測 12 個月時的模仿 表現。 另一方面,實驗 2 進一步控制物體操作的方式,因為行經路徑長短與外觀結 果變化可能提供與目標有關的線索,本實驗採用的模仿作業包含兩種不同操作類 型,分別是結合動作作業(combinatory action task)與非結合動作作業(non-combinatory action task)。結合作業中的物體由兩個獨立的物件組成(如環圈 與橫桿),示範過程包括手持物體(環圈)朝特定目標(橫桿)移動,導致物件間接觸 構成新的外觀輪廓,移動過程中,與實驗 1 的刺激影片相似,嬰兒接收到與動作 目標有關的路徑線索。非結合作業的設計是為了排除路徑線索的相似性影響預測 注視與模仿表現之間的關聯,非結合作業的物體本身內含可移動的物件(如可上 下移動的三角形),操作此物件可在物體上引發結果狀態(如蜂鳴器的聲音),由於 物件已事先組裝完成,物體的外觀輪廓並不因物件操弄而產生變化,相形下,路 徑所提供與目標有關的訊息亦較有限。 實驗 2 的研究策略具有重要的意涵。首先,從模仿的研究文獻中,大部份的 發展心理學家傾向將模仿視為嬰兒與生俱來的能力,認為模仿是社會性認知發展 的先驅能力,強調模仿的功能面向,事實上,我們對於模仿的原因與過程所知甚 少,因此本研究透過縱貫研究的策略,從不同的分析層次並進,探討模仿與早期 社會認知能力的關聯,在理論發展上,有助於釐清模仿與解讀目標的能力在早期 發展中,是一開始相互獨立,最後才結合為統整的系統,或是二者在嬰兒時期的 發展變化事實上可視為連續的過程。在實務應用方面,如果解讀目標代表社會性 認知能力早期發展的的神經心理記號,將有助於臨床上評估技術的提升,針對特 殊兒童的早期診斷提出更有效的鑑別指標,進而對早期介入方式建議可能的改善 策略。 實驗 2 的假設是:如果解讀意圖是模仿的必要能力,依據經驗基礎論與鏡相 神經元系統的論點,歸因意圖對人類行為的特殊性最敏感,我們認為觀看手事件 引起之注視偏好,最能預測嬰兒同時或之後的模仿表現;然而,依據線索基礎論, 歸因意圖不受限於人為動作的屬性,則觀看手事件或自發動物體事件後之注視時 間差異,應皆能預測她們同時或之後的模仿表現。此外,若目標預測與動作者的 訊息來源無關,而是決定於訊息處理的效率,我們認為在挑戰的情況下,觀看短 路徑事件的潛伏期變異應該比觀看長路徑事件更能鑑別嬰兒的訊息處理效率,也
21 因而更能預測她們同時或之後的模仿表現。
第一節 研究方法
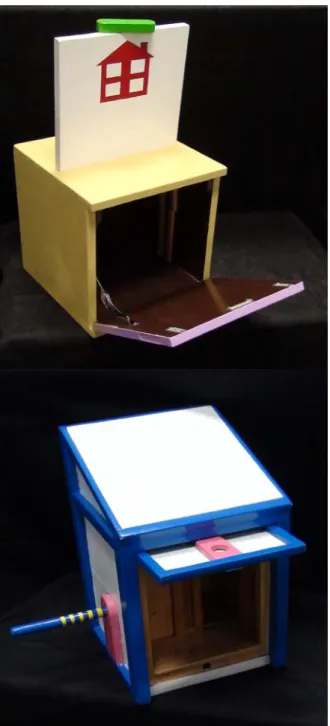
受試者 實驗 1-2 的受試者為 8 個月大時參加實驗 1-1 的嬰兒,邀請其於 12 個月時 回實驗室參加模仿的測試,回測者計有 38 位(17 位男生,21 位女生, M = 12.33 個月,SD = 0.36 個月,以下稱為 8 個月組)。 實驗刺激 依據操作方式,實驗刺激包含兩類物體作業:結合動作(combinatory acts)作 業與非結合動作(noncombinatory acts)作業。結合動作作業包含啞鈴、聲盒-棒子、 橫桿-圈圈三組物體,每一組物體由兩個獨立分開的部件組成,目標結果的完成 依賴操作其中一個部件,使其與另一部件組成新的結果輪廓。非結合動作作業由 三角形、掀盒與推盒三個物體組成,每一個物體內含有一可移動的部件,操弄此 部件可在物體上引發特定的目標結果,但此部件無法從物體上拆解下來。 以下是實驗刺激的設計描述(見圖): 一、結合動作作業: 啞鈴。此物件是一個形似啞鈴的物體,包含兩個正方體,兩正方體的一面接 有黃色塑膠管,其中一端的塑膠管較窄,因此在初始狀態時可收於另一管內部, 當雙手抓住兩端正方體向外拉時,則可拆成兩個獨立的部件。 聲盒-棒子。此物件包括了一個方形盒子與一圓柱形木棒,盒子的表面大約 傾斜30度,在表面的右方中間處有一凹洞,大小剛好可容納木棒的尾端,凹洞下 面裝設有開關,當棒子進入凹洞觸壓按鈕時,將啟動開關,引發盒內的蜂鳴器發 出聲音。 橫桿-圈圈。此物件包括了一塊架在木製板子上的長方形直立木板,及一直 徑約4cm的塑膠圈圈。在直立木板的1/2上方處有一突出的塑膠橫桿,圈圈可穿過 橫桿尖端的珠子,懸吊在橫桿上。 二、非結合動作作業: 三角形。此物件的底座為一由壓克力板製成之方盒,頂座為一由壓克力製成 之五角盒,底座與頂座之間由一塑膠管連接,一個中央有圓孔的三角形體穿過塑 膠管,因為管內裝有隱藏式電子開關,當三角體在底座與頂座之間上下移動,經 過塑膠管中段時,將啟動電子開關,引發底座內的蜂鳴器發出聲音。 掀盒。此物件的底座為一木作長方盒,朝上的一面為可透光的壓克力板,長 方盒表面的中線位置裝有一活動的木框,木框可於表面上做來回 180 度的翻轉, 因為木盒其中一邊裝有隱藏式的開關,當木框翻轉至有開關的那一邊盒面時,將 啟動開關引發內部的燈泡發光。 推盒。此物件為一木作長方盒,盒面長邊的中線開有一軌道,軌道上有一塊 方形積木,因為長方盒內部其中一邊裝有電子式開關,當方塊順著軌道推至裝有 開關的一邊時,將啟動開關,引發內部的蜂鳴器發出聲音。22 實驗設計 實驗二採受試者內與受試者間二因子混合設計。受試者內變項為模仿作業類型 (結合動作作業 vs.非結合動作作業),受試者間變項為注視風格(短目標注視時間 vs.長目標注視時間)。 實驗情境 實驗過程中,小朋友坐在高腳椅上(若受試者不願坐高腳椅,則坐在家長的 腿上)家長坐在小孩旁邊,前方為一長桌,實驗者坐在小孩的正對面。兩架數位 攝影機固定於三腳架上,分別立於實驗者的左後方與右後方,左後方鏡頭是由正 面捕捉受試者的臉、手、身體及其前方桌面上的物體,其拍攝資料為事後記分的 主要依據;右後方的攝影機是拍攝可能因物體遮蔽無法自正前方補捉的動作,是 為記分的參考資料。等待小孩坐定位後,實驗者再次提醒家長勿影響小孩的自然 反應,接著開始依序示範。 實驗者依序示範引發每個物件預期呈現的結果所需之目標動作。一開始,實 驗者兩手平放於桌子上,物件呈現於初始狀態置放在實驗者的兩手之間。接下 來,實驗者以口語提示「看這邊」並開始操作物體。啞鈴:實驗者雙手抓住啞鈴 兩端的方塊,將兩端的方塊向外拉,啞鈴遂拆解成兩個獨立的物件;聲盒-棒子: 實驗者單手拿棒子朝下,朝盒子方向移動,以棒子的尾端向下壓盒子表面的凹 洞,引發蜂鳴器發出聲音;橫桿-圈圈:實驗者單手拿圈圈,將圈圈穿過橫桿尖 端的珠子,並將圈圈懸掛在橫桿上;三角體:實驗者使用雙手將三角體往上移動, 使三角體離開底座,當經過管子中間時,引發蜂鳴器發出聲音;掀盒:實驗者單 手握住木框的外緣,將木框翻轉180度至盒子的另一側,水平放於表面並按壓開 關,使木盒表面發光;推盒:單手抓住盒面上的方塊,將方塊移動至盒子的另一 側,引發蜂鳴器發出聲音。每一個物體皆重複操作三次後,接著交由受試者操作。 計分 每位受試者的攝影資料包括其在每一物體之20秒反應時間的資料,依據錄影 帶,實驗者詳細登錄受試者在每一段反應時間產生的動作類型。每一個物體的計 分皆有兩個部份,分別為第一個反應的動作,以及在20秒內達成目標動作的反應。 計分方式為出現目標動作者計1分,若無則為0分。最後再依據結合作業與非 結合作業,分別求出兩項作業在第一個動作及20秒內達成目標動作的總分數。 以下為實驗物體之目標動作的操作型定義。啞鈴:雙手抓住啞鈴兩端的方 塊,將兩端的方塊向外拉開,並使其變成兩個完全分開的部份;聲盒-棒子:手 拿棒子朝下,路徑朝盒子方向移動,以棒子的尾端向下壓盒子表面的凹洞,並引 發蜂鳴器發出聲音:圈圈-橫桿:手拿圈圈,將圈圈懸掛在橫桿上,圈圈必須越 過尖端的珠子與橫桿接觸,若未接觸橫桿,圈圈經過的距離必須超過橫桿的1/2; 三角體:手將三角體上提,三角體必須離開底座,並引發蜂鳴器發出聲音;掀盒: 手抓木框,將木框翻轉至盒子的開關處,使盒面發光;推盒:手抓住盒面上的方 塊,將方塊移動至盒子的另一側,引發蜂鳴器發出聲音。 評分者間信度 全部受試者的攝影資料,邀請一位大學生與實驗者一同觀察、記分,作為分 析研究資料的主要依據。為了達到評分者間信度,再邀請另一位不知研究目的的
23 大學生擔任信度評分者,並在正式記分前進行訓練。在確定信度記分者清楚了解 記分原則及熟悉記分的操作型定義後,由其單獨紀錄所有資料。 在結合動作與非結合動作作業中,20 秒內完成目標動作的評分者一致性係數分 別為 0.86 與 1.00(Cohen’s kappa)。評分者間的一致性相當高。 圖四 實驗 1-2 模仿作業的實驗刺激 結合作業 啞鈴 聲盒-棒子 橫桿-圈圈 非結合作業 三角形 掀盒 推盒
第二節 結果分析
由於在短路徑嘗試中,組間差異反映在目標注視時間,我們遂根據短路徑嘗 試中注視目標平均時間的中位數,將注視時間大於中位數之嬰兒編組為長目標注 視時間組,小於中位數者編為短目標注視時間組,比較這兩組嬰兒在兩種作業類 型的模仿表現。由於目標注視時間代表嬰兒觀察動作事件時對目標的注意,如果 歸因目標在模仿過程中扮演重要的角色,長目標注視時間組的模仿表現應優於短 目標注視時間組。 表十三說明人手或布手經由短路徑將珠子投入目標,依照嬰兒 8 個月時目標 注視時間的中位數,將其歸類為長目標注視時間(long goal looking)與短目標注視 時間(short goal looking),分組後各組人數、平均注視時間與 12 個月時所測得之 模仿表現。卡方檢定發現:在長目標注視時間組,較多觀看人手動作的受試者,反之,在短目標注視時間組,較多觀看布手動作的受試者,χ2
(1, N = 34) = 5.85,