Novel Non-contact Control System for Medical
Healthcare of Disabled Patients
CHI-CHUN LO
1,2, TSUNG-YI CHIEN
3, JENG-SHYANG PAN
4,5, (Senior Member, IEEE),
BOR-SHYH LIN
6, (Senior Member, IEEE)
1Department of Engineering and Maintenance, Chang Gung Memorial Hospital, Kaohsiung, Taiwan. 2 Institute of Electrical and Control Engineering, National Chiao Tung University, Hsinchu, Taiwan. 3 Administration Center, Chang Gung Medical Foundation, Taoyuan, Taiwan.
4 College of Information Science and Engineering, Fujian University of Technology, Fuzhou, China.
5Shenzhen Graduate School, Harbin Institute of Technology, Shenzhen, China.
6Institute of Imaging and Biomedical Photonics, National Chiao Tung University, Tainan, Taiwan.
Corresponding author: B.-S Lin ([email protected])
This work was supported in part by the research grants of Chang Gung Memorial Hospital under the grant number CORPG8E0141-2. The funders had no role in study design, data collection and analysis, decision to publish, or preparation of the manuscript. Chi-Chun Lo and Tsung-Yi Chien contributed equally to this work.
ABSTRACT When limb-disabled patients want to activate the nurse emergency call system, adjust the temperature on air-conditioners, switch on or off lights, watch television, or have other urgent needs and require assistance from other people, their needs cannot be readily met if there is no one around. All above devices need to be operated manually or with a remote control. Thus disabled patients cannot operate by themselves, and this also increases the burden of the nursing assistants. In order to improve the above issue, a novel non-contact control system is designed to allow disabled patients activating the nurse emergency call system and adjusting other appliances. Disabled patients can stare at the control icons of a visual stimulus generator, which accompanies a wearable electroencephalogram (EEG) acquisition device with non-contact dry electrode for monitoring patients’ EEG signals and converting the EEG signals into relevant control commands via the signal processing system, to achieve the function of nurse calling and the effect of controlling the devices in a hospital. The result shows that the proposed system could effectively monitor and convert EEG signals and achieve the control effects for which disabled a patient desires in a hospital. Therefore, the non-contact control system provides a new control framework for the facilities in a hospital, which significantly assist patients with limb disability.
INDEX TERMS Nurse emergency call system; visual stimulus generator; wireless EEG acquisition device; non-contact control system; disabled patients.
I. INTRODUCTION
Many patients with limb disability require long-term caring and can’t fulfill even some basic daily needs without others’ assistance. This not merely inflicts psychological burden on themselves and their family but also leads to a waste of medical costs. In hospitals, nurse emergency call systems, air-conditioners, lighting, and TV sets are what patients use most frequently. When a patient needs help while nursing staff are not around, the nurse emergency call system can remind the staff near the ward of a patient needing assistance by making both the door light in the ward and the indicator light outside display and the alert sound simultaneously. A bedside call panel with call cord of the nurse emergency call system is installed near the head of a hospital bed. When a patient presses the button of bedside call panel, the signal will activate the door light and the indicator light via the host of nurse emergency call system. However, these devices can only be switched on or off manually or with a remote control, which
disables the patients with limb disability from accomplishing what they want to do. Hence, it is useful and important to develop a non-contact control system to satisfy their needs and achieve the effect of patient safety.
In recent years, several user interfaces of non-contact control systems have been proposed, such as voice control, hand gesture recognition, and eye tracking, etc. In 1998, Bolcioni et al. proposed a novel voice control video system by using an on-chip isolated word speech recognizer [1]. In 2005, Ha et al. proposed a voice control system for wheelchairs by using voice recognition [2]. In 2005, Manresa et al. proposed a user-adaptive control system based on hand tracking and gesture recognition [3]. In 2012, Jeong et al. utilized a television control system based on gesture recognition to operate television [4]. They utilized a single camera to capture hand gesture and designed a specific circuit to transform the gesture invariants into control commands. The technique of eye tracking was also applied to the non-contact control field
in previous studies. In 2002, Barea et al. utilized an eye control system based on Electrooculography (EOG) to control a wheelchair [5], where the EOG signal was measured via the electrodes near the eyes and then fed to the input of the eye model to control the driver motor in the wheelchair by the movement of the eye balls. In 2005, Morimoto et al. presented several techniques for a remote eye gaze tracking with improved usability. These techniques simplified or eliminated the calibration procedure and consent free head motion [6]. However, the above methods might be affected by environment conditions, such as noise interference, illumination conditions, misidentified normal hand movements and unnecessary eyes movements, or were unfit and inconvenient for disabled patients.
Brain-computer interface (BCI) is a technology that utilizes human neurophysiological signals for the direct brain communication with an external device, without any additional muscle activity [7, 8, 9, 10]. Based on the property of BCI techniques, a novel non-contact control system for the medical healthcare of disabled patients is proposed in this study to assist the patients who suffer from limb disability but have clear consciousness in communicating with the outside and taking care of themselves with their own consciousness, in turn elevating their quality of medical care and life, and achieving the target of patient safety. Patients could readily use the proposed control system by concentrating on the flickering control icons of the visual stimulus generator, without manual
operation. A wearable electroencephalogram (EEG)
acquisition device with non-contact dry electrodes is also developed to monitor real-time EEG signals. Different from traditional BCI systems, the proposed control system has several benefits, such as (1) a consumer tablet being used as the visual stimulus generator for the first time and (2) a wearable EEG acquisition device with the advantages of small volume, light weight, easy setup, and measuring EEG signal without conductive gel. Therefore, the practicability and convenience for the clinical applications is obviously improved in this study.
II. MATERIALS AND METHODS
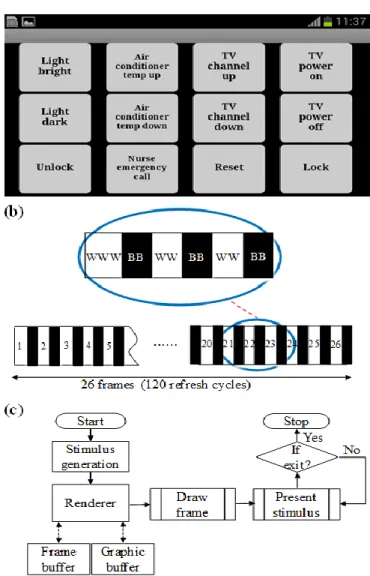
The proposed non-contact control system for medical healthcare is composed of several independent modules to generate meaningful actions. The key modules include a visual stimulus generator, a wearable EEG acquisition device, a signal processing system, and a device controller. The basic scheme and the photograph of the proposed non-contact control system are shown on Figure 1 (a) and Figure 1 (b), respectively. Here, twelve flickering control icons with different flickering frequencies (7.5 Hz ~ 13 Hz) would be generated by the visual stimulus generator as the sources of visual stimuli. The flickering frequencies of the icons " Light bright ", " Air conditioner temp up ", " TV channel up ", " TV power on ", " Light dark ", " Air conditioner temp down ", " TV channel down ", " TV power off ", " Unlock ", " Nurse emergency call", " Reset ", and " Lock " were set to 7.5 Hz, 8
Hz, 8.5 Hz, 9 Hz, 9.5 Hz, 10 Hz, 10.5 Hz, 11 Hz, 11.5 Hz, 12 Hz, 12.5 Hz and 13 Hz respectively. The disabled patients can execute control commands by concentrating on the wanted icon on the visual stimulus generator. When a patient’s eyes receive the specific visual stimulus, the specific EEG rhythm would be produced in his/her brain. Next, the wearable EEG acquisition device is utilized for measuring these specific EEG rhythms and transmitting them to the signal processing system by way of Bluetooth interface. Finally, the controlling program built in the signal processing system receives the EEG signals continuously and translates them into control commands and then transmits these control commands to the device controller to control the devices in the hospital.
A. VISUAL STIMULUS GENERATOR
Different from other BCI systems using LEDs as the visual stimulus devices, a consumer tablet is first used as the visual stimulus generator in this study. A visual stimulus program is also implemented to provide flickering visual stimulus sources with different flickering frequencies. The visual stimulus program provides twelve flickering control icons which represent specific functions, such as activating the nurse emergency call system and switching on an air-conditioner and a television, etc. The screenshot of the visual stimulus program FIGURE 1. (a) Basic scheme and (b) photograph of proposed non-contact control system for medical healthcare.
is shown in Figure 2 (a). In order to reduce the possibility of faulty operation, two additional icons (unlock and lock) are used for initializing and ending the command sequence respectively in order to supply an additional control locking mechanism. In order to prevent epilepsy influenced by high-frequent flickering, the frequency band of the visual stimulus is set from 7.5 Hz to 13 Hz in this study.
However, it is hard to attain specific flickering frequencies because the refresh rate of the consumer tablet is 60 Hz and is usually not divided by these specific flickering frequencies. In this study, an approach is proposed to produce the specific flickering frequency. For instance, in order to produce 13 Hz flickering frequency, 26 frames have to be randomly inserted in 120 refresh cycles. The division of 120 by 26*2 equals 2, with the remainder of 16. Therefore, 16 frames with 3 refresh cycles and 10 frames with 2 refresh cycles have to be randomly inserted in 120 refresh cycles to produce 13 Hz flickering frequency, and the interval between two frames is 2 refresh cycles. Figure 2 (b) illustrates the time series diagram of the proposed approach for producing 13 Hz flickering frequency.
The structure of the visual stimulus program chiefly includes thread, resources, and graphic user interface (GUI). The thread part includes the threads of stimulus generation and renderer. The former offers the function of rewriting the renderer and produced multiple frequency-relevant elements practically representing the visual stimulus. The latter, by rendering every frame displaying in the canvas of the application, is employed to create visual stimuli. The resources part supplies all resources of extra display elements, most of which are bitmap files used as menu navigation icons. The GUI part offers a restricted and resource-efficient approach to develop graphic user interface and comprises a graphic buffer and a frame buffer. The flowchart of the visual stimulus program is shown in Figure 2 (c). First, the thread of stimulus generation produces the stimulus elements (abstract concepts in data structure) that can only form visual stimuli with a renderer. With bitmap resources and produced stimulus elements, the renderer is then rewritten by the renderer thread. Next, the renderer and stimulus generation threads send the generated data to the graphic buffer separately. The other display components, such as menu, along with the data in the graphic buffer are written into the frame buffer, through which the elements in the graphic buffer could be better presented to enhance the quality of display. Then, the program uses the data in the frame buffer for producing sequential frames to create continuous visual stimuli.
B. WEARABLE EEG ACQUISITION DEVICE
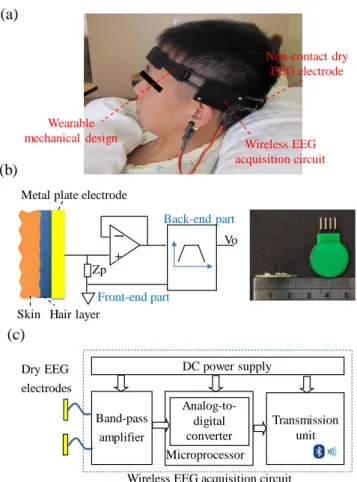
In this study, a novel wearable EEG acquisition device is also developed. It consists of non-contact dry EEG electrodes, a wearable mechanical design, and a wireless EEG acquisition circuit. The photograph of the wearable EEG acquisition device is shown in Figure 3 (a).
Here, the non-contact dry EEG electrode is developed to
measure EEG across the hair layer to reduce the influence of hair. It is composed of a metal plate electrode and an active circuit. The front-end of the active circuit is designed to provide a high input impedance to avoid the signal attenuation, and the back-end of the active circuit is designed to reserve the meaningful EEG signal and reduce the influence of the motion artifact. The basic scheme and the photograph of the contact dry electrode are shown in Figure 3 (b). The non-contact dry EEG electrode is placed on the occipital area (Oz) of the brain, with the reference electrode near the ear. Here, the wireless EEG acquisition circuit includes a bandpass amplifier with frequency band 0.1Hz~100Hz and gain value 5000, a microprocessor including a 12-bit analog-to-digital converter (ADC), and a data transmission unit with Bluetooth interface. The block diagram of the wireless EEG acquisition circuit is shown on Figure 3 (c).
FIGURE 2. (a) Screenshot of visual stimulus program, (b) time series diagram of proposed approach for generating 13 Hz flickering frequency, and (c) flowchart of visual stimulus program.
Here, the wearable mechanical design is designed to provide the convenience and practicability of the wearable EEG acquisition device for disabled patients. It is composed of a rectangular plastic box to have room for the wireless EEG acquisition circuit, and an adaptive mechanical design, placed between the non-contact electrode and the plastic band, includes three small plastic plates and a steel spring. Here, one of the plastic plates is fixed on the plastic band, and the other is fixed on the non-contact electrode. Here, the plastic band is used as a wearable mechanism, similar to a headband, and can supply the flexibility to adapt the head shape. The adaptive mechanical design can provide a force to make the electrode contact well to keep a good signal quality efficiently. The wearable EEG acquisition device can be charged by Micro-USB port and be utilized more than 8 hours.
C. SIGNAL PROCESSING SYSTEM
A consumer computer is used as the platform of the signal processing system. A controlling program built in the signal processing system is designed to receive EEG signals from the wearable EEG device and to produce relevant control commands and then transmit commands to the device controller to command the devices in the hospital. The software structure of the controlling program is composed of threads and resources. The thread of BT API is used for setting
Bluetooth communication between the signal processing system and the wearable EEG device. The thread of EEG translation is designed to translate EEG signals into control commands to control the devices in the hospital. The part of resources contains the external resources needed in the program.
Figure 4 shows the flowchart of the controlling program. At the beginning, the thread of BT API searches for the wearable EEG acquisition device and makes a SPP stream to link the system. Next, the thread of EEG translation translates the received EEG signal into a control command sequence. At that time, the system lock status would be checked by the program. When the status is locked, the program would not execute any control commands until an unlocked status is identified. On the other hand, when the status is unlocked, the program would execute the sequential control commands successively until a locked status or a lock instruction is identified.
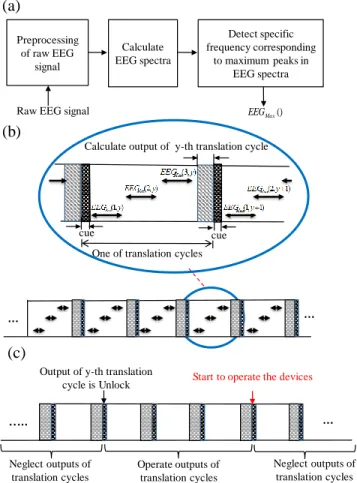
The procedures of EEG processing and the time-series diagram of translation process in the controlling program are illustrated in Figure 5 (a) and Figure 5 (b), respectively. The period between two cues can be viewed as one translation cycle, which is less than 5 seconds in this study. In Figure 5 (a), the received EEG signal is preprocessed to filter out higher frequency interference and reserve the meaningful EEG feature related to steady-state visual evoked potential (SSVEP). To get EEG spectra, a 512-point fast Fourier transform (FFT) with a 384-point overlap is utilized, and the frequency corresponding to the maximum peak in the EEG spectra between 7 Hz and 14 Hz would be detected. Let EEGMax( y1, ), EEGMax( y2, ), EEGMax( y3, ) denote the frequencies corresponding to the maximum peaks in the three consecutive EEG spectra at the y-th translation cycle, as shown in Figure 5 (b). The frequency can be viewed the specific frequency of the visual stimulus focused if three consecutive frequencies are the same. Finally, with the estimated specific frequency, the translation procedure can generate a control command corresponding to the flickering control icon focused. However, most of BCI systems are difficult to discriminate whether the disabled patient wants or does not want to perform a control command. This also
Start Search BT device Check BT device Connect to BT device EEG data translation If “unlock” status If “lock” instruction If “unlock” instruction If “work” instruction No Yes Yes Yes No Yes No No Yes
Set “lock” status
Set “unlock” status Instruction generation Execute instruction
FIGURE 4. Flowchart of controlling program in signal processing system.
Skin
Metal plate electrode
Front-end part Back-end part + ─ Hair layer Zp Vo Non-contact dry EEG electrode Wearable
mechanical design Wireless EEG
acquisition circuit
(a)
(b)
(c)
Band-pass amplifier Analog-to-digital converter Microprocessor DC power supply Transmission unit Dry EEG electrodesWireless EEG acquisition circuit
FIGURE 3. (a) Photograph of wearable EEG acquisition device, (b) basic scheme and photograph of non-contact dry EEG electrode, and (c) block diagram of wireless EEG acquisition circuit.
increases the limitation of the practicality of these BCI systems. In this study, a specific coding scheme is developed to provide an operational mode similar to self-paced BCI systems, as shown in Figure 5 (c). Whenever a disabled patient wants to perform a control command, he/she first focuses on the unlock icon to unlock the system for executing the control sequence. After finishing the sequence, he/she can either wait for locking up the system automatically or focus on the lock icon to lock up the system.
D. DEVICE CONTROLLER
The device controller is used for controlling the nurse emergency call systems, air conditioners, lights and televisions in the hospital. It mainly consists of an embedded Bluetooth receiver board (KSRobot KSM008 HC-05, Kaise Electronics Inc, Taiwan) and control circuits with infrared (IR) interface. When the device controller receives relevant control commands from the signal processing system via Bluetooth interface, the corresponding device will be activated via the infrared (IR) remote control to satisfy the disabled patient’s desire. The air conditioner and television are directly controlled via the device controller by infrared interface. However, both the nurse emergency call system and the light need to build an IR control board (S01, IT-Home Technology CO, Taiwan) on their sides to receive control signal from the
device controller by infrared interface. For the nurse emergency call system, an IR control board is built in the bedside call panel to activate the switch of the system. It delivers a control signal to I/O interface card after activating via the infrared (IR) control circuit of the device controller. When the host of nurse emergency call system receives a calling signal from I/O interface card, the indicator alarm will be activated. In addition, there is an IR control board built in the light side to activate the switch of a light to make the light bright or dark.
III. RESULTS AND DISCUSSIONS
A. SYSTEM VERIFICATION OF NON-CONTACT CONTROL SYSTEM
In this section, the reliability of the proposed wearable EEG acquisition device for measuring EEG signals in hairy site is first verified. Due to the experimental demand, the disabled patients are instructed to focus on different stimulus control icons on the visual stimulus generator about one minute, and the corresponding EEG signals are recorded for analyses. The experimental results for raw EEG signals and their spectra corresponding to distinct visual stimuli are shown in Figure 6. Obviously, different peak values could be discovered at the frequencies of the EEG spectra corresponding to different specific frequencies of visual stimuli. As a result, the proposed wearable EEG acquisition device could be exactly applied in the proposed non-contact control system to access EEG signals in the hairy site without conductive gel. The conventional EEG electrode with conductive gel (wet electrode) is most frequently used for measuring EEG. However, the conductive gel may irritate the skin [11], and it could easily encounter the issue of dehydration for long-term measurement to affect the signal quality [12]. Dry electrodes can improve the above issue effectively. However, most of the contact dry electrodes cannot contact with the scalp well, in particular, in the hairy site [13]. Different from other contact dry electrodes, the proposed non-contact dry electrode with adaptive mechanical design can measure EEG across the hair layer to improve the influence of the hair layer. From the experimental results, the proposed non-contact dry electrode can provide a good performance for measuring EEG in hairy site.
0 0.5 1 1.5 2 2.5 3 -50 0 50 Time (second) A m p li tu d e ( u V ) 0 10 20 30 40 0 5 10 Frequency (Hz) E E G S p e c tr u m 0 0.5 1 1.5 2 2.5 3 -50 0 50 Time (second) A m p li tu d e ( u V ) 0 10 20 30 40 0 5 10 Frequency (Hz) E E G S p e c tr u m
Frequency of visual stimulus: 8 Hz
Frequency of visual stimulus: 12 Hz
FIGURE 6. Raw EEG signal and EEG spectra of steady state visually evoked potentials corresponding to different frequencies of visual stimulus.
(a)
(b)
…
…
cue Calculate output of y-th translation cycle
One of translation cycles cue Preprocessing of raw EEG signal Calculate EEG spectra Detect specific frequency corresponding to maximum peaks in EEG spectra
Raw EEG signal EEGMax()
(c)
..…
…
Neglect outputs of translation cycles Neglect outputs of translation cycles Operate outputs of translation cycles Output of y-th translationcycle is Unlock Start to operate the devices
FIGURE 5. (a) Procedure of EEG signal processing, (b) time-series diagram of translation process for steady state visually evoked potentials, and (c) illustration of specific coding scheme.
Next, the system verification and the performance evaluation of the proposed non-contact control system are demonstrated. There are 10 patients taking part in the system reliability experiment and accept the questionnaire survey. Their ages are ranging from 30 to 60 years old, and all of them do not have experiences in operating the proposed system and accept pre-training. Here, information transfer rate (ITR), proposed by Wolpaw et al. [14] and most frequently used for performance estimation of brain computer interface, is used for evaluating the performance of the proposed non-contact system. It can be calculated by
)
1
(
)
1
(
log
)
1
(
log
log
2 2 2N
P
P
P
P
N
V
ITR
(1)where ITR denotes the information transfer rate (bits/trial),
V
is the application speed in trials/second, N is the number of mental selections, and P is the classifier accuracy. Then the bit rateB
could be calculated by
minute
symbols
*
symbol
bits
B
(2) The experimental results show that the sensitivity andspecificity of the proposed system are 90.2±7.2% and 91.1±4.8%, respectively. In this system, N is set 12 as the visual stimulus generator includes twelve different control icons. Hence, the information transfer rate of the proposed system is about 2.53~3.19 bits per trial. In this system, the interval of EEG translation cycles is about 5 seconds so that the best bit rate of the proposed system is about 38.28 bits/ minute. Several brain computer interfaces have been developed and applied in control or communication systems [15-19]. Shyu et al. applied brain computer interface on a multimedia system [20]. They utilized a light-emitting diode (LED) panel for the visual stimulus device and utilized an EEG acquisition module with three electrodes, and the average accuracy was about 89.29%. Cecotti proposed a new self-paced BCI speller based on the detection of steady-state visual evoked potential without any training [21]. They combined the target and the visual stimuli like in the P300- speller paradigm and utilized eight electrodes to measure EEG signals. The average of the accuracy was about 92.25%. Lehtonen et al. utilized the average of EEG amplitude in specific frequency band like the BCI feature [22]. The feature was transformed by three linear transformations of feature space, and the average accuracy was about 80 %. Hazrati et al. presented a new technique for hand grasp control [23]. They utilized an adaptive neural network to judge hand opening and grasping from EEG signals measured from C3, C4, Cz, F3, F4, Fz and Pz in the international 10-20 system. The average accuracy was about 89.5 %.
Different from other BCI systems that need massive EEG machines and multi-channel EEG signals for extracting EEG data, the proposed non-contact control system utilizes a small-volume, wireless, and wearable EEG acquisition device and single channel EEG signals to draw out SSVEP, which also improves the convenient use. Besides, conventional SSVEP-based BCI systems utilize light-emitting diodes (LED) as the visual stimulus generator. In this study, a consumer tablet is utilized as the visual stimulus generator, which effectively improves the system integration and has the feature of light, easy setup, and good acceptability. In previous studies related to SSVEP-based BCI, the general information transfer rate was about 17~24.67 bits per minute [20-23]. From the experimental results, it shows the information transfer rate of the proposed system about 30.36~38.28 bits/ minute. From the above mentioned, the experimental results demonstrate the reliability of the proposed system that it can be applied to other application in all field.
B. COMPARISON WITH OTHER NON-CONTACT CONTROL SYSTEMS
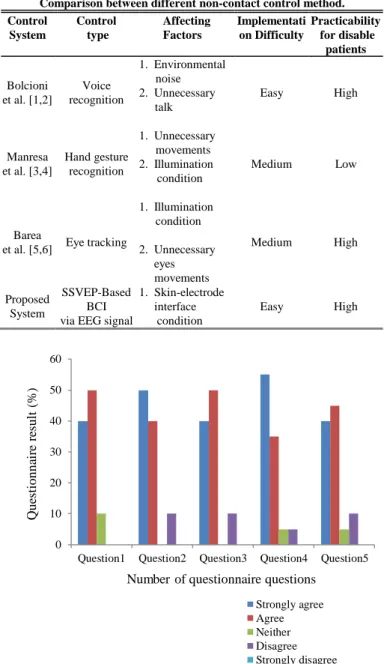
Several user interfaces for disabled patients have been designed and discussed in previous studies [1]-[6]. Current non-contact control systems include voice recognition systems, hand gesture recognition systems, and eye tracking systems. A voice recognition system has been put forward earlier, but it might be affected by noise interference and is unfit to be used in the ward. Although there is no noise interference issue on a hand gesture recognition system, it is unfit and inconvenient for limb-disabled patients. About the drawback of an eye tracking system, unnecessary eyes movements might cause wrong judgement on the active control commands, and it is difficult for the users to control it all the time. The advantages of the proposed system are that the disabled patients could easily operate this controller by merely focusing on the control icons without manual operation, and the proposed wearable EEG acquisition device and the design of visual stimulus tablet also improves the convenience of setup and use and provides high compatibility for other commercial products. The comparison between the proposed system and other non-contact control systems is shown in Table 1.
A total of ten disabled patients with ages ranging from 30 to 60 are recruited for this experiment, and the trial number of each subject is ten, and all patients’ families provide a written informed consent. In order to evaluate the benefits of the proposed system, a proper questionnaire is devised for patients, patients’ family, and nursing assistants. There are ten questionnaires offered to patients, and twenty questionnaires to patients’ family and nursing assistants. The content of the questionnaire includes the following. (1) Patients could operate the proposed system without help. (2) If needed, you are willing to use the proposed system again. (3) Patients are satisfied with the proposed system and feel good. (4) The proposed system could lighten the loading of the nursing
assistants. (5) The proposed system is helpful for patients and improves their quality of life in the hospital. Figure 7 shows the result of the questionnaire survey. It could be seen that the respondents’ approval of the proposed system is more than 85%. The proposed system provides a new operational mode, thus the disabled patients could easily operate the proposed system by themselves via concentrating on the flickering control icons without manual operation.
C. FUTURE WORK AND APPLICABILITY OF THE SOLUTION IN OTHER FIELDS
The development of the proposed system can be viewed as an innovative system prototype, and can be utilized in all kinds of medical care in the future. Besides, the visual stimulus
device could be combined with other consumer electronic products, such as LCD control system for multimedia and electric bed, and new coding architecture of visual stimulus has still to be updated and upgraded to avoid the interference with other environmental flickering light sources.
IV. CONCLUSION
In this study, a novel non-contact control system for medical healthcare of disabled patients is proposed and successfully applied in the hospital. According to the advantage of the brain-computer interface technique, the proposed system can be used by the brain, without manual operation, to control the nurse emergency call system, lights, air-conditioners and TV sets in the hospital. In this study, a tablet is also used as the visual stimulus for the first time, and a specific coding scheme is proposed to provide the property of asynchronous operation so as to increase the practicability of the proposed system and the convenience for use. Furthermore, a wearable EEG acquisition device with non-contact dry EEG electrodes is also designed and implemented in this study. With the advantages of small volume, light weight, and easy setup in the proposed EEG sensor, the proposed system can be easily used for measuring EEG signals in hairy site, without conductive gel, in the hospital. The system performance of the proposed non-contact control system has been tested and verified. The verified result shows that the disabled patients can operate the proposed system by themselves, meaning that the proposed system can effectively improve the long-term care burden for patients’ family and nursing assistants and be exactly applied clinically to achieve the target of patient safety.
REFERENCES
[1] L. Bolcioni, M. Felici, R. Rambaldi, and R. Guerrieri, “A low-power, voice-controlled, H.263 video decoder for portable applications,” IEEE
Journal of Solid-State Circuits, vol. 33, no. 11, pp. 1810-1819, Nov.
1998.
[2] Q. P. Ha, T. H. Tran, and G. Dissanayake, “A wavelet-and neural network-based voice interface system for wheelchair control,”
International Journal Intelligent Systems Technologies and
Applications, vol. 1, no. 1-2, pp. 49-65, Jul. 2005.
[3] C. Manresa, J. Varona, R. Mas, and F. J. Perales, “Hand Tracking and Gesture Recognition for Human-Computer Interaction,” Electronic
Letters on Computer Vision and Image Analysis, vol. 5, no. 3, pp.
96-104, Jul. 2005.
[4] S. Jeong, J. Jin, T. Song, K. Kwon, and J. W. Jeon, “Single-camera dedicated television control system using gesture drawing,” IEEE
Transactions on Consumer Electronics, vol. 58, no. 4, pp. 1129-1137,
Nov. 2012
[5] R. Barea, L. Boquete, M. Mazo, and E. Lopez, “System for Assisted Mobility Using Eye Movements Based on Electrooculography,” IEEE
Transactions on Neural Systems and Rehabilitation Engineering, vol.
10, no. 4, pp. 209-218, Nov. 2002.
[6] C. H. Morimoto, and M. R. M. Mimica, “Eye gaze tracking techniques for interactive applications,” Computer Vision and Image Understanding, vol. 98, no. 1, pp. 4-24, Apr. 2005.
[7] J. R. Wolpaw, D. J. McFarland, G. W. Neat, and C. A. Forneris, “An EEG-based brain-computer interface for cursor control,”
Electroencephalography and Clinical Neurophysiology, vol. 78, no. 3,
pp. 252-259, Mar. 1991.
[8] E. C. Leuthardt, G. Schalk, J. R. Wolpaw, J. G. Ojemann, and D. W. Moran, “A brain-computer interface using electrocorticographic signals 0 10 20 30 40 50 60
Question1 Question2 Question3 Question4 Question5
Strongly agree Agree Neither Disagree Strongly disagree Number of questionnaire questions
Q ue st ionna ir e re sul t (% )
FIGURE 7. Experimental result of questionnaire survey for benefits of proposed non-contact system.
TABLE 1
Comparison between different non-contact control method. Control System Control type Affecting Factors Implementati on Difficulty Practicability for disable patients Bolcioni et al. [1,2] Voice recognition 1. Environmental noise 2. Unnecessary talk Easy High Manresa et al. [3,4] Hand gesture recognition 1. Unnecessary movements 2. Illumination condition Medium Low Barea
et al. [5,6] Eye tracking
1. Illumination condition 2. Unnecessary eyes movements Medium High Proposed System SSVEP-Based BCI via EEG signal
1. Skin-electrode interface
condition
in humans,” Journal of Neural Engineering, vol. 1, no. 2, pp. 63-71, Jun. 2004.
[9] Y. Wang, R. Wang, X. Gao, B. Hong, and S. Gao, “A Practical VEP-Based Brain-Computer Interface,” IEEE Transactions on Neural
Systems and Rehabilitation Engineering, vol. 14, no. 2, pp. 234-239,
Jun. 2006.
[10] R. Sitaram, H. Zhang, C. Guan, M. Thulasidas, Y. Hoshi, A. Ishkawa, K. Shimizu, and N. Birbaumer, “Temporal classification of multichannel near-infrared spectroscopy signals of motor imagery for developing a brain-computer interface,” NeuroImage, vol. 34, no. 4, pp. 1416-1427, Jun. 2007.
[11] A. Gruetzmann, S. Hansen, and J. Müller, “Novel dry electrodes for ECG monitoring,” Physiological Measurement, vol. 28, no. 11 pp. 1375-1390, Jun. 2007.
[12] C. T. Lin, L. D. Liao, Y. H. Liu, I. J. Wang, B. S. Lin, and J. Y. Chang, “Novel Dry Polymer Foam Electrodes for Long-Term EEG Measurement,” IEEE Transactions on Biomedical Engineering, vol. 58, no. 5 pp. 1200-1207, Jun. 2011.
[13] Y. J. Huang, C. Y. Wu, A. M. K. Wong, and B. S. Lin, “Novel Active Comb-shaped Dry Electrode for EEG Measurement in Hairy Site,”
IEEE Transactions on Biomedical Engineering, vol. 62, no. 1 pp.
256-263, Jun. 2014.
[14] J. R. Wolpaw, H. Ramoser, D. J. McFarland, and G. Pfurtscheller, “EEG-Based Communication: Improved Accuracy by Response Verification,” IEEE Transactions on Rehabilitation Engineering, vol. 6, no. 3 pp. 326-333, Jun. 1998.
[15] G. R. Muller-Putz, and G. Pfurtscheller, “Control of an Electrical Prosthesis With an SSVEP-Based BCI,” IEEE Transactions on
Biomedical Engineering, vol. 55, no. 1 pp. 361-364, Jan. 2008.
[16] R. C. Panicker, S. Puthusserypady, and S. Yin, “An Asynchronous P300 BCI With SSVEP-Based Control State Detection,” IEEE Transactions
on Biomedical Engineering, vol. 5, no. 6 pp. 1781-1788, Feb. 2011.
[17] P. F. Diez, V. A. Mut, E. M. A. Perona, and E. L. Leber, “Asynchronous BCI control using high- frequency SSVEP,” Journal of NeuroEngineering and Rehabilitation, vol. 8, no. 1 pp. 38-47, Jul. 2011.
[18] R. Ortner, B. Z. Allison, G. Korisek, H. Gaggl, and G. Pfurtscheller, “An SSVEP BCI to control a hand orthosis for persons with tetraplegia,” IEEE Transactions on Biomedical Engineering, vol. 19, no. 1 pp. 1-5, Jul. 2011.
[19] E. Yin, Z. Zhou, J. Jiang, Y. Yu, and D. Hu, “A Dynamically Optimized SSVEP Brain-Computer Interface (BCI) Speller,” IEEE Transactions on
Biomedical Engineering, vol. 62, no. 6 pp. 1447-1456, Jun. 2015.
[20] K. K. Shyu, P. L. Lee, M. H. Lee, M. H. Lin, R. J. Lai, and Y. J. Chiu, “Development of a Low-Cost FPGA-Based SSVEP BCI Multimedia Control System,” IEEE Transactions on Biomedical Circuits and
Systems, vol. 4, no. 2 pp. 125-132, Apr. 2010.
[21] Y. Liu, X. Jiang, T. Cao, F. Wan, P. U. Mak, P. I. Mak, and M. I. Vai, “Implementation of SSVEP Based BCI with Emotiv EPOC,” in Proc.
IEEE International Conference on Virtual Environments Human-Computer interfaces and Measurement Systems, Tianjin, China, Jul. 2-4,
2012, pp. 34-37.
[22] A. Nawrocka, and K. Holewa, “Brain-Computer Interface based on Steady-State Visual Evoked Potentials (SSVEP),” in Proc. 14th
International Carpathian Control Conference, Rytro, Poland, May
26-29, 2013, pp. 251-254.
[23] Y. Zhang, P. Xu, K. Cheng, and D. Yao, “Multivariate synchronization index for frequency recognition of SSVEP-based brain-computer interface,” Journal of Neuroscience Methods, vol. 221, no. 15 pp. 32-40, Jan. 2014.
Chi-Chun Lo is currently the Director of the
Department of Engineering and Maintenance, Chang Gung Memorial Hospital, Kaosiung, Taiwan. He is also a Ph.D candidate for Electrical and Control Engineering in National Chiao Tung University, Taiwan. His research interests are in the areas of Biomedical Circuits and Systems, Electrical and Control Engineering.
Tsung-Yi Chien is currently the Deputy of
Administration Center, Chang Gung Medical Foundation, Taoyuan, Taiwan. His research interests are in the areas of hospital building space planning, mechanical and electrical engineering design, planning and construction of public facilities.
Jeng-Shyang Pan (M’01-SM’09) received the B.
S. degree in Electronic Engineering from the National Taiwan University of Science and Technology in 1986, the M. S. degree in Communication Engineering from the National Chiao Tung University, Taiwan in 1988, and the Ph.D. degree in Electrical Engineering from the University of Edinburgh, U.K. in 1996. Currently, he is the Assistant President in Fujian University of Technology and the Doctoral Advisor in the Harbin Institute of Technology Shenzhen Graduate School. He has published more than 500 papers in which 200 papers are indexed by SCI. He is the IET Fellow, UK and has been the Vice Chair of IEEE Tainan Section. He was Awarded Gold Prize in the International Micro Mechanisms Contest held in Tokyo, Japan in 2010. He was also awarded Gold Medal in the Pittsburgh Invention & New Product Exposition (INPEX) in 2010, Gold Medal in the International Exhibition of Geneva Inventions in 2011 and Gold Medal of the IENA, International “Ideas – Inventions – New products“, Nuremberg, Germany. He was offered Thousand Talents Program in China in 2010. He is the Editor-in-Chief of Journal of Information Hiding and Multimedia Signal Processing. His current research interests include soft computing, robot vision and signal processing.
Bor-Shyh Lin (M’02-SM’15) is currently a
Associate Professor of the Institute of Imaging and Biomedical Photonics, National Chiao Tung University (NCTU), Taiwan. He received the B.S. degree from NCTU, Taiwan, in 1997, M.S. degree in electrical engineering from National Taiwan University (NTU), Taiwan, in 1999, and Ph.D. degree in electrical engineering from NTU, Taiwan, in 2006. His research interests are in the areas of Biomedical Circuits and Systems, Biomedical Signal Processing, and Biosensor.