行政院國家科學委員會專題研究計畫 成果報告
多時序三維空間資訊於地層下陷監測及分析--子計畫:以空
載光達技術進行地層下陷監測之研究(I)
研究成果報告(完整版)
計 畫 類 別 : 整合型 計 畫 編 號 : NSC 96-2625-Z-004-002- 執 行 期 間 : 96 年 08 月 01 日至 97 年 07 月 31 日 執 行 單 位 : 國立政治大學地政學系 計 畫 主 持 人 : 邱式鴻 計畫參與人員: 大專生-兼任助理人員:徐華穗 大專生-兼任助理人員:陳德睿 大專生-兼任助理人員:吳宇 大專生-兼任助理人員:陳怡安 大專生-兼任助理人員:林伶潔 其他-兼任助理人員:李景中 處 理 方 式 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢中 華 民 國 97 年 10 月 28 日
行 政 院 國 家 科 學 委 員 會 專 題 研 究 計 畫 成 果 -期 末 報 告
多時序三維空間資訊於地層下陷監測及分析-子計畫二
以空載光達技術進行地層下陷監測之研究(I)
計畫編號:NSC 96-2625-Z-004 -002 - 執行期限:自民國 96 年 8 月 1 日至民國 99 年 7 月 31 日 主持人:邱式鴻 政治大學 地政學系 共同主持人:陳良健 中央大學 太空及遙測研究中心一、中文摘要
地層下陷是台灣西南部地區一個很 嚴重的問題,受地層持續下陷影響,每當 颱風侵襲期間,持續性的大雨或豪雨之後 常導致排水不良,造成相當嚴重的災情。 因此,為求有效了解地層下陷量並進行地 層下陷監控,地表空間資訊獲取方式中已 有傳統的精密水準測量,以及 GPS 高程 測 量 方 法 實 際 應 用 於 地 層 下 陷 量 的 監 測。然這兩種監測方式均需藉到現地觀 測,且觀測資訊均屬點或線的分佈型態, 除較無法獲取全面性的監測資料之外,所 需要的時間成本也較多。因此,本計畫是 三年期整合型計劃「多時序三維空間資訊 於地層下陷監測及分析」中的子計畫二, 擬以最新的空載光達測量技術,利用其能 在短時間自動獲取大區域範圍且具高精 度高密度的特性進行地層下陷可行性的 探討與評估。第一年先進行蒐集彙整實驗 區中已觀測之原始光達點雲資料或數值 高程模型(Digital Elevation Model, DEM) 資料,並規劃實驗區光達資料之掃瞄計 畫。第二年建立演算模式,並從原始點雲 資料中製作 DEM 資料及其他三維空間資 訊,提供其他計畫使用。第三年比較光達 DEM 資料與傳統航測 DEM 資料之差異 性,並分析歷年來之地層下陷量。以目前 空載光達測量技術,可達到的高程精度約 為 10cm,且可提供甚多之細節。若評估 可行,將來結合各個子計劃的研究成果將 更有助於未來地層下陷監測工作之進行 和後續地層下陷成因之分析。本報告提出 本子計畫二第一年之計畫成果,本年度研 究重點在於進行文獻蒐集和分析,確定應 用於地層下陷的空載光達資料掃瞄作業 方式與精度評估,蒐集實驗區現有的空載 光達資料,以及蒐集實驗區第一年期的空 載光達資料,探討穩定監測面之萃取方 式,完成試驗區的數值表面模型(Digital Surface Model, DSM) 或 數 值 高 程 模 型 (Digital Elevation Model, DEM)資料的產 製。研究成果顯示預期之目標均已達成。 關鍵詞︰地層下陷、光達、數值地型模型、災害模擬。
Abstract
Land subsidence along the southwestern area in Taiwan is a serious problem. The continuous land subsidence leads to the poor drainage, causing serious flood during the heavy rainfall. Therefore, traditional precise leveling surveying and GPS height surveying techniques have been implemented for effective land subsidence monitoring. However, these two surveying techniques are time-consuming and not cost-effective because they need to collect the height data by setting up the instruments on site. In addition, those collected
point-scattering or profile-scattering data cannot provide the global data for whole area to conduct comprehensive analysis and evaluation for land subsidence. Therefore, this study will evaluate and investigate the feasibility of airborne LIDAR (LIght Detection And Ranging) data for land subsidence. Airborne LIDAR data is acquired by airborne LIDAR surveying technique. This whole new surveying technique can collect 3-D point clouds with high height accuracy and high point density in short time. By using the above-mentioned characteristics, airborne LIDAR data is highly potential to provide global data for land subsidence without time-consuming and cost-effective. This research project in one sub-project of three-year integrated research project, titiled “Monitoring and Analyses for Land Subsidence Using Multi-temporal 3D Geoinformation”. For this research project, the first year will collect the relevant existing LIDAR data and DEM data and then acquire the LIDAR data by airborne LIDAR surveying technique after elaborate flight project and investigation on the improvement of height accuracy. The second year will develop the data processing schema to generate the DEM data for other studies in the integrated research project. The last year will analyze the land subsidence and compare the differences of data generated from aerial photogrammetry and airborne LIDAR surveying technique. If the land subsidence monitoring by using airborne LIDAR data is feasible, the research results combined with other sub-projects in the integrated research
project will be useful for future land subsidence monitoring and analysis.
The objective of the second sub-project in the first year is to collect the relevant existing LIDAR data and DEM data in the test area and meanwhile acquire the LIDAR data by airborne LIDAR surveying technique in the test area after elaborate flight project and investigation on the improvement of high accuracy from the relevant literatures. Meanwhile, the method to extracting stable monitoring surface from LIDAR data will be investigated. The above-mentioned tasks have been finished this year. The subsequent task in next year is to develop the algorithm to calculating the height component of Land Subsidence between two different periods.
Keywords: Land subsidence, LIDAR, DEM,
Disaster Simulation.
二、前言與研究目的
台灣西部沿海地區地勢低漥,受地層 持續下陷影響,排水不良問題相當嚴重, 每當颱風侵襲期間,持續性的大雨或豪雨 之後常導致淹水災情,若適逢大潮導致海 水倒灌,則淹水災情更是嚴重。 台灣地區地層下陷問題肇始於六十 年代迄今已逾三十餘載,持續下陷面積已 達1,140平方公里,最大累積下陷量達到三 公尺以上,主要區域集中在彰化、雲林及 嘉義之沿海及內陸地區。 造成地層下陷的主要原因之一為自 然的地質作用,尤其是台灣西南部平原及 沿海地區,其地層多屬河流或洪流沖積土 砂而構成之沖積平原,由於各沖積平原之 土層構造,較為鬆軟及特殊,土層堆積而 造成土砂顆粒間自然壓密所形成之緩慢地層下陷自然不可避免。因此,921大地 震之後更造成彰化到嘉義臨海地區地層 下陷達四、五十公分;另一個造成地層下 陷的主因則是人為因素,也就是土地之過 度開發與利用,尤其近年來,使得地層下 陷之幅度與速率有加快之現象,例如地下 水超抽。而地層因累積下陷量降低地面高 程之影響,弱減河海堤保護標準、阻滯排 水設施功能發揮,致易遭洪泛或暴潮溢淹 災害之侵襲。因此對於地層下陷的之現 象,必須整合分析相關的空間資料觀測成 果,協助地層下陷的成因、機制、防治與 風險進ㄧ步的研究分析,期能發展完整有 效的監測系統達到減低地層下陷造成之 損害。因此,經濟部水利署和財團法人工 業技術研究院建立了地層下陷資訊管理 系統提供台灣地區地層下陷資料整理、地 陷知識簡介、相關文獻整理、進行Web GIS 查 詢 與 最 新 訊 息 瀏 覽 ( 參 考 http://www.subsidence.org.tw/)。 此外,目前政府對地層下陷的防範措 施是定期進行地層下陷監測,並進行「嚴 重地層下陷地區」劃設作業,提供防洪排 水 與 防 災 設 施 之 興 建 及 改 善 工 程 之 參 考。根據經濟部「嚴重地層下陷地區劃設 作業規範」,劃設或變更嚴重地層下陷地 區之參考資料有兩種,第一種為地層下陷 資料,包括符合二等水準點閉合標準之地 面高程檢測資料及經濟部水利署管理之 地層下陷監測井資料。此外,全球定位系 統(Global Positioning System, GPS)高程測 量、驗潮站資料配合其他測量技術、航測 (Aerial Photogrammetry) 、衛星遙測 (Remote Sensing)及其他監測技術等也經 常應用於地層下陷監測。第二種為易淹水 區域資料,包括以經濟部水利署繪製之感 潮線、台灣地區常淹水地區及颱風豪雨水 災常淹水地區等區域之聯集為主,各縣 (市)政府淹水地區調查資料為輔。 而地層下陷的監測方法包括利用(一) 水準測量、(二)衛星定位測量、(三) 遙測 INSAR干涉量測技術的地表監測方法(柳 志錫、諶凱英,2006)和利用(一)單管式、(二) 雙管式、和(三)無線電波分層式監測井的 地下監測方法。此外,空載光達(LIDAR) 技術,因為可於短時間內獲取大片面積高 密度且高精度的高程資料,其高程精度達 公寸級(史天元、彭淼祥,2003;內政部, 2005),因此可利用於地表較細微的地形變 化監測,而對於地層下陷監測則有應用的 可能性。若對於監測區域再獲取遙測影 像,則可進ㄧ步建立當地的土地覆蓋及利 用之資訊,有助於後續地層下陷成因之分 析。 至目前為止,在地層下陷監測方面仍 以精密水準測量方法為最普遍且精度較 高。然而水準測量作業相當耗費人力、時 間甚多、不易自動化,且測量之時間間隔 較大,不易獲得連續之地層下陷資料。目 前水利單位於沿海地層下陷較嚴重之地 區施行傳統水準測量即限於人力時間,故 平均2~3年方得輪流施測一次。此外水準 測量所得為單點高程資訊,無法完整呈現 全區域整體地層下陷現況。為了進行淹水 分析及模擬,尚須取得網格形式之資料, 其作法是將擬檢討地區分割為長寬各一 公里之正方形網格,並將具有參據之累積 下陷量與近年地層下陷年平均速率地層 下陷檢測資料,經空間內插方法分配於網 格中。此外,不論是大地水準測量、地層 下陷監測井或是GPS 高程資料,均需藉由 觀測儀器親臨現場測量,且觀測資料型態 皆屬於點分佈資料或是斷面資料,觀測點 位的分佈及密度或是斷面的位置將影響 到網格資料的空間內插結果,而所採用的 內插方式亦是重要的影響因素之一。倘能
透過航測及遙測等空間資訊技術獲取地 表三維資訊之變動量,不僅不需赴現場觀 測,亦可節省相當大人力及時間,且可瞭 解 大 面 積 區 域 之 地 層 下 陷 之 趨 勢 及 分 佈,故總計畫「多時序三維空間資訊於地 層下陷監測及分析」中擬推動、評估、及 促進航測及遙測等空間資訊技術應用於 大面積區域地層下陷監測的可行性。為了 直接獲取大面積高解析度地層下陷之網 格資料,總計畫中擬利用各種空間資訊技 術獲取多時序三維空間資訊,同時分析比 較不同時期、不同感測器之觀測資料,期 望觀察出地層下陷範圍之變化;此外更進 ㄧ步分析地層下陷範圍與淹水災害間之 關係,提供相關單位進行地層下陷區域劃 設、淹水模擬、擬定減災措施及建設防災 設施之參考。總計畫中所採用的遙測技術 包括多時序歷史航空照片(子計畫一)、空 載光達掃瞄(子計畫二)及雷達影像(子計 畫三)等技術,除了可以獲取大面積高解析 度三維地形資料以外,尚可建立三維建物 模型(Building Models)(子計畫四)供災害 境況模擬使用(子計畫五)。因此,總計畫 整合不同時間、不同解析度之三維空間資 訊,以觀察歷年來實驗區之地層下陷量, 並與歷史淹水災害進行分析比對。各項子 計畫經過完整且嚴謹的思維邏輯,由各子 計畫主題之間的關聯性出發,規劃總計畫 之整合架構。五個子計畫間關係如圖1, 其中箭頭代表其關聯性。 而本計劃即為總計畫中的第二個子 計畫,試圖探討並分析以空載光達資料進 行地層下陷監測的可行性。 空 載 光 達 (LIDAR) 或 稱 雷 射 掃 瞄 儀 (Airborne Laser Scanner)之量測技術乃利 用雷射掃描方式,大量且快速地向地面發 射雷射光波,藉由感測器接收雷射反射訊 號,經電腦計算處理後得到地面掃描點之 三維座標,進而達到獲取地物三維空間座 標之目的。經由光達點雲(Point Clouds)資 料 之 處 理 可 以 直 接 獲 得 數 值 地 形 模 型 (DTM)資料及三維建物模型等資料。如何 利用空載光達技術快速獲取三維空間資 訊,進行全面性地層下陷監測,為本子計 畫之主要研究目的。而製作的不同時段、 不同解析度之數值表面模型 (DSM
)
或數 值高程模型(Digital Elevation Model, DEM) 資料則可供總計劃中利用GIS 進行水災 致災因子分析、地層下陷量之時間分析及 災害境況模擬等(子計畫五),最後並將本 計畫之成果提供作為子計畫五中以三維 網路GIS 技術(3D Web GIS)介面所建立 的三維空間資訊查詢雛形系統中,資料查 詢 及 視 覺 化 模 擬 及 展 現 功 能 之 基 礎 資 料,供相關單位參考使用。 而過去有關地層下陷監測分析的空 間資料觀測成果包含年度性的水準觀測 資料、GPS 固定站資料、不同時期的數值 地形模型(DEM)資料、地下水位監測井資 料、及重力觀測資料等,這些資料對地層 下陷現象而言,有些是點或線的描述,有 些則是面的描述,資料的分佈、觀測時 期、精度、及參考系統相當多元,但空載 光 達 技 術 機 動 性 更 強 且 可 以 以 更 高 效 率,於短時間內獲取大面積且高密度、高 精度的高程資料。若研究確實可行,將更 有助於未來進行地層下陷監測工作之進 行且對後續地層下陷成因之分析更將有 所助益。三、文獻回顧與分析
如前所述,地層下陷的監測方法包括 利用(一)水準測量、(二)衛星定位測量 (GPS)、(三)遙測INSAR干涉量測技術的地 表監測方法(柳志錫、諶凱英,2006)和利 用(一)單管式、(二)雙管式、和(三)無線電波分層式監測井的地下監測方法。其中空 間技術主要用於地表的監測,除了傳統的 精密水準測量之外,還有GPS測高已經實 際應用於地層下陷的研究中,如彭淼祥等 人(2001)針對地層下陷分析為應用目的, 探討GPS測高作業模式,文中探討觀測的 需求條件、作業模式、分析步驟等,最後 並比對GPS下陷量與水準觀測下陷量之驗 證分析。研究成果顯示,施測範圍800平 方公里,水準高程的測量精度達1公分以 內;由同一時期兩個完全重複觀測的GPS 網比較,內部精度高程達15mm、平面精 度達5mm、基線精度達1.6mm。由兩個時 期GPS網所得到之下陷量與兩個時期水準 所獲得之下陷量驗證精度,由8個驗證數 據顯示,GPS與水準作業最大差值11mm, 平均4mm。而洪偉嘉等人(2006)應用GPS 技術,分別於彰化、雲林地區設置GPS固 定站,以遠端傳輸及監控方式,對主要下 陷區做全天候監控。另外對於雲林縣全區 利用GPS技術搭配所研發之GPS監測樁實 行高程監測。經實測成果顯示,應用GPS 技術進行地層下陷監測,為確實可行的方 法。 上述利用GPS測高進行地層下陷的監 測必須由觀測儀器親臨現場測量,且觀測 資料型態屬於點分佈資料,觀測點位的分 佈位置及密度將影響地層下陷之分析與 判斷,且較不易進行全面性的下陷分析。 為了不需赴現場觀測,節省人力及時間, 且可瞭解大面積區域之地層下陷趨勢及 分佈,則有王志添等人(2001)研究利用合 成口徑雷達(SAR)之差分干涉測量法,求 取地表位移量,估算台灣東南部東港沿海 地區(約45公里x 25公里)地表下陷情形。此 法是以三軌道差分干涉方式,選用ERS1 與ERS2 之合成口徑雷達資料分別為1996 年1 月31 日、2 月1 日、5 月16 日。前 兩張影像日期差一天為Tandem Mode資 料,具有高同調性,以此產生地形之干涉 圖像及數位地形,與選擇另一張影像,具 有同調性且時間差為105 天之影像,產生 差分干涉圖像,求取地表位移量估算地表 下陷情形。將求出之地層下陷與同年下半 年中央地調所於該地區以GPS 作地面觀 測資料比較分析,得到一致之下陷趨勢 外,最大下陷速度約為2公分/月,首次證 明差分干涉法於亞熱帶多植物的台灣地 區之下陷監測具有實用價值。此外,謝嘉 聲 與 史 天 元 (2006) 以 ERS 的 衛 星 雷 達 影 像,利用差分干涉的技術產生在地形平坦 區域的位移圖形,以偵測地震的地表變形 情形。為能確實的比較所獲得的結果,將 GPS量測所得點位變動資料,經內插處理 及座標轉換後,形成雷達座標系統之干涉 條紋圖,以檢驗雷達干涉所獲得之結果, 經比對干涉條紋圖後,兩者間干涉條紋的 變化情形相當一致。 雖然遙測INSAR干涉量測技術的地 表監測可以獲取全面性的資料,但機動性 仍比不上空載光達測量技術。空載光達技 術的發展,源自1970 及1980 年代美國太 空總署(NASA)的研發,之後因應全球定位 系統(Global Positioning System, GPS)及慣 性 導 航 系 統 (Inertial Navigation System, INS)的發展,使得精確的即時定位定姿態 方法得以實現。經由德國Stuttgart 大學於 1988 至1993 年期間將雷射掃瞄技術與 即時定位定姿態系統加以結合產生初始 的 空 載 雷 射 掃 瞄 儀 系 統 (Ackermann, 1999)。所以光達測量技術就是使用雷射光 束進行掃描式測距之系統,如圖2所示, 空載光達的測量原理就是透過將雷射掃 描儀固定於飛行載台上,由空中向地面以 高頻率發射雷射光束,並由感測器接收反 射訊號後,記錄發射脈衝到接收反射訊號
之間的時間差,載台以DGPS 完成精密的 動態定位,同時利用INS 獲取慣性姿態維 度,導出外部參考座標,每一次掃描皆建 立自雷射載台至地面反射點間之空間向 量,整合距離、位置、姿態以及座標之資 料,進而可推導出地面投影之三維座標, 使地形高程測量作業快速而準確。 除機動性之外,空載光達測量技術具 有下列的特性(劉進金,2005): 1. 快速測繪高精度三維座標點 2. 獨 立 點 與 多 重 回 訊 (Multiple echoes): 3. 受天氣影響比一般航測小: 因此利用空載光達測量技術可快速 獲得地形的三維地形資料,對於地形模型 與地表模型的建立、地形變化的分析等, 為一非常快速而有效的方法。本子計畫引 進新科技空載光達測量技術,期待以其具 備高度機動性,能快速及有效率獲取區域 的三維地形資訊,和受天氣影響小的特 性,並配合適當的飛航規劃,施測相隔特 定時間間隔實驗區的地形變化。 空載光達技術機動性強且可以以更 高效率,於短時間內獲取大面積且高密 度、高精度的高程資料。然光達資料其高 程精度雖高,其誤差亦約為10cm,因此是 否合適用於地層下陷監測分析,實有待進 一步研究,所以本年度子計畫二主要是透 過文獻蒐集和分析,確定應用於地層下陷 的空載光達資料掃瞄作業方式與精度評 估,蒐集實驗區現有的空載光達資料,以 及 蒐 集 實 驗 區 第 一 年 期 的 空 載 光 達 資 料,探討以空載光達進行地層下陷的關鍵 因素以及探討萃取穩固監測面的方法,完 成試驗區的DSM、DEM資料的產製。若研 究確實可行,將更有助於未來進行地層下 陷監測工作之進行且對後續地層下陷成 因之分析更將有所助益。
四、主要研究流程與研究方法
本子計畫研究蒐集涵蓋目標區之空 載光達資料,分析研究期間內空載光達資 料高程之變化以求地層下陷量,本年度為 三年期計畫之第一年。研究工作內容包 含:(1).透過文獻蒐集和分析,確定應用於 地層下陷的空載光達資料掃瞄作業方式 與精度評估;(2).蒐集實驗區第一年期的空 載光達資料;(3).完成試驗區的 DSM、 DEM 資料的產製;(4).蒐集實驗區現有的 空載光達資料。此外,本年度亦探討萃取 穩固監測面的方法。研究流程如圖 3 所示。 本研究的重點乃利用不同時期的空 載光達資料進行地層下陷之分析,然目前 一般經驗空載光達高程精度達 15 公分 時,平面精度約在 50 公分左右(Tao and Yasuoka, 2002; Lohr et al., 2004; Habib et al., 2006),對於試驗區雲林元長的沉陷速 度最近兩年約為每年 11.6 公分(經濟部水 利署,2006)和 8.2 公分/年(許海龍,2007) 的下陷情況進行監測,此精度是否足以檢 定其下陷量,因此空載光達資料的高程精 度是否能透過適當的規劃掃描以達到每 年地層下陷監測之應用,或是僅僅只能以 間隔較長(如 2~3 年)的空載光達資料應用 於地層下陷分析,這將是第一個可能遭遇 的問題。 其次,產製 DSM 或 DEM 已經經過人 工編修或是內插處理,以 DSM 或 DEM 來 比較地層下陷將有精度不足的問題,因此 地層下陷量的計算如何直接由產製的點 雲資料直接計算而得,這將是第二個可能 遭遇的問題。此外,不同時期空載光達具 有 差 異 性 的 資 料 有 可 能 來 自 於 地 物 變 遷,因此在進ㄧ步分析地層下陷的變化量 之 前 必 須 先 將 地 物 變 遷 的 部 份 排 除 在外,才能達到真正分析地層下陷量的目 標。因此,如何透過所蒐集各年度之水準 測量資料、GPS 觀測資料、航拍照片、雷 達影像、土地使用分區、防洪公共設施等 其他相關資料,協助排除地物變遷量達到 真正分析地層下陷量乃是第三個可能遭 遇之問題。最後,由於空載光達資料是採 用 GPS 測高的系統,而傳統精密水準測量 所得的結果是正高系統,因此將來分析空 載光達地層下陷量時如何透過正確的大 地起伏模式修正,是第四個可能遭遇之問 題。 總之,利用空載光達測量技術監測地 層下陷面臨的四個關鍵技術: (一)、光達點雲精度是否足以判斷地 層的下陷量。 (二)、如何以點雲資料來比對不同時 期的高程。 (三)、非自然地層下陷(變動)數據的過 濾。 (四)、正確的大地起伏模式。 針對上述研究過程可能遭遇的問題 分別說明如下。 (一)、光達點雲精度是否足以判斷地層的 下陷量 本研究實驗區雲林元長附近近兩年 最大年下陷速率約 11.6 公分/年和 8.2 公分 /年,依彭淼祥等人(2001)研究顯示地層下 陷之重複監測頻率、觀測精度與下陷量規 模有關,以年下陷量達 11.6 公分和 8.2 公 分的地區,觀測頻率每年施測一次,觀測 高程精度至少需達 5.8 公分(2 倍σ < 11.6 公分)和 4.1 公分(2 倍σ < 8.2 公分)。 所以提高光達點雲高程精度將可提 高不同時期點雲高程比較的顯著性,目前 國內光達點雲成果雖然其高程已經可以 達到 5 公分以內的精度水準(許海龍, 2007),但其乃依據控制點水準測量之成果 進行高程約制所得,而本計劃研究擬直接 以橢球高進行地層下陷監測,因此依據各 種 影 響 空 載 光 達 成 果 精 度 的 因 素 探 討 (Maune, 2001; Morin, 2002; Maas, 2002; 陳大科等,2005; 高玉惠等,2005 ; 劉榮 寬等,2005),原則上保留(許海龍,2007) 之飛行掃描規劃,而於第 10 步驟稍作改 良,期望亦能提高空載光達橢球高精度並 直接運用光達資料之橢球高進行地層下 陷監測,因此飛行掃描規劃如下: 1. 降低飛航高度:在飛航安全高度 與航空管制高度條件下,規劃較 低之飛航高度以增加雷射點反射 訊 號 強 度 並 減 少 飛 航 帶 寬 的 寬 度。 2. 調降雷射脈衝率:可增強接收雷 射點雲的反射訊號,確保訊號接 收的穩定與品質。 3. 縮小掃描角度:除可提高雷射點 雲密度外,並可減少飛行時大角 度掃描邊緣點位的誤差。 4. 降低飛行速度:增加雷射點雲密 度,可提高觀測量的可靠度。 5. 提高 GPS 測量精度:以 24 小時連 續觀測提高地面測站位置及橢球 高精度;依據衛星顆數時段表、 出沒軌跡圖、PDOP 值等資訊規劃 最佳觀測時段。 6. 航帶重疊比例:航帶規劃左右至 少各需 30%重疊。 7. 每條航線至少應有 2 個 GPS 基 站同步接收 GPS 觀測量,基站與 航線範圍小於 20km。 8. 交叉飛航(Cross Flight)數據:測區
範圍內航線需進行航線之起點、 中間及終點各進行 1 條交叉飛航 掃描,並須以掃描面積重疊範圍 最大為原則。 9. 航帶平差:利用航帶平差提高實 驗區雷射點雲整體的精確度。 10. 加入地面已知控制點進行約制: 於全區佈設控制點,比較點上雷 射點之高程較差值,建立橢球高 程修正模式,再利用此模式進行 全區雷射點之高程修正,並據以 製作 DSM、DEM 等後續應用的資 料庫。 (二)、如何以點雲資料來比對不同時期的 高程 比較同區域範圍內高程差異性之相 關研究如下: 1.以航帶重疊區評估相關光達掃描精度 Latypov(2002) 以 地 表 區 域 範 圍 及 平 坦度為變數採用 68%及 95%信賴區間的統 計方法(詳表 1、2),計算並篩選航帶重疊 區內各區域的高程平均值與標準偏差,可 求得左右航帶重疊的差異,進而評估系統 誤差。此法有很多優勢,它避免了單點匹 配的問題,以及在分析和檢查重疊區內明 確的平坦表面時能靈活運用大小不同的 地表。透過不同大小的地表,能在某些程 度上區分隨機、系統和地域的系統誤差。 而且一個大區域的平均高程可以忽略隨 機誤差的影響。 上述方法雖是應用於航帶平差來解 決航帶重疊區高程殘差的問題,但對於不 同時期相同區域的監測工作也可參考其 以區域內平均高程及平坦度為參數篩選 適當的監測面,以供觀測其地層下陷的變 化量。 2.雷射測高地形的品質改善 荷蘭在建立國家數值高程模型時,是 以大量的地面控制點來提高空載光達測 量的精度,而所謂地面控制點是以一公頃 大小區域內實地測量的 100 個地形點為一 個控制點,該地表的選定是以運動場等較 平坦的地區為主,也就是比較平坦、大區 域 的 平 均 高 程 方 法 來 控 制 光 達 地 形 模 型,而平坦、大區域內多個點雲的平均高 程 可 減 少 雷 射 噪 音 的 誤 差 (Elberink et al.,2003) ,亦即以多個光達點取代單個光 達點可以忽略隨機誤差的影響。假設雷射 噪音誤差為 12cm,面積內點雲數量為 100 點 , 則 平 均 高 程 的 差 異 為 (12* 2 )/ 100 =1.7cm (Crombaghs and Brugelmann,2000)。 由上述分析以及由於光達平面精度較 高程精度差,一般經驗空載光達高程精度 達 15 公分時,平面精度約在 50 公分左 右,因此本研究採用多個光達點計算出之 擬合平面中心高程方式亦有上述降低隨 機誤差影響的優點,因此為了避免高差因 DSM、DEM 模型內插造成的精度降低, 將以原始點雲擬合平面中心高程來比較 不同時期同一監測面高程的變化情形。 而地層下陷分析是屬於多時期數據 的變形分析應用,考慮變形觀測所需的作 業設計要點(彭淼祥等人,2001)包括: 1. 相同的觀測精度:前後期觀測精 度應具統計性相等,再進行比較 才有意義,可採 F 檢驗測試。 2. 相同的基準:確認起算基準區域 之穩定性,避免因基準系統性差 異誤判為下陷量的變化。 3. 安排相同條件的觀測程序:前後 期影響量相同,經由高程相減仍 獲得正確下陷量
4. 重複監測頻率需求:監測頻率、 觀測精度與下陷量規模有關。 為求不同時期有相同的比較基準,本 研究擬採用區域適中(大區域可分割成數 塊區域計算,例如 5m×5m)、精度高、坡 度變化小及穩定不易變化的區域的人造 平坦面中心的地形地物面作為監測面供 長期觀測的點雲擬合平面中心高程來進 行不同時期地層下陷的比對。其進行方式 說明如下: 1 測區網格化 依據本研究規劃中的光達密度為 4.5 點/m2,在 5m×5m=25m2大小面積內平均 將有 25×4.5=112 點的點雲資料,觀測點數 達 100 點以上,符合多個光達點取代單一 光達點的構想。最後再以統計方法的 t 檢 定來比較高程的差異,並將上述所定之門 檻值加以測試並調整至合理範圍,以期達 到最適監測面的選定。如合乎條件的監測 面數量過少將嘗試以更小的區域來萃取 監測面,過多時也可嘗試減小平坦度角度 或加大區域範圍以增加電腦計算效率。 而以每一網格面內含 100 個光達點 為原則,配合 96、97 年空載光達掃描密 度(詳表 1),將2km 10× km的測區劃分為 5 米見方大小的 80 萬個網格(監測面),供後 續分析其屬性(即平面坡度及平均反射強 度)是否符合監測之所需。 2 網格中心高程 將網格區域內所有原始光達點雲以 最小二乘法進行平面擬合後,求出擬合之 平面方程式係數,並取其擬合平面之中心 高程來代表網格中心高程。 3 擬合平面平坦度 由於光達平面精度較高程精度差,一 般經驗空載光達高程精度達 15 公分時, 平 面 精 度 約 在 50 公 分 左 右 (Tao and Yasuoka., 1998;Lohr.U. et al., 2004;Habib et al., 2006)。如監測面不夠平坦,平面的 誤差將會影響高程的大小,因此配合 96、 97 年空載光達掃描具 4.6、3.0 公分的內部 精度,規劃地表監測面的平坦度亦即平面 傾斜角度控制在 5 度以內,可使點雲因平 面誤差而造成的高程誤差保持在 4.6 公分 以內( 0.5 m×tan5°≒ 0.046m )。 4 擬合平面精度 配合 96、97 年空載光達掃描具 4.6、 3.0 公分的內部精度成果,以擬合平面精 度小於 4.6 公分者為平坦之監測面(本研究 中使用的 96 年光達點雲資料雖然是航帶 平差前的點雲資料,其航帶重疊區高程誤 差為 5.6 公分,本研究雖取其航帶平差後 4.6 公分的內部精度為門檻值,但並不影 響萃取的結果)。 (三)、非自然地層下陷(變動)數據的過濾 不同時期空載光達高程資料之差異 性有可能來自於地物變遷,因此在進ㄧ步 分析地層下陷的變化量之前必須先將地 物變遷的部份排除在外,才能達到真正分 析地層下陷量的目標。目前初步構想如 下: 1. 以高程差異常數據過濾:依實驗區每 近兩年最大地層下陷量 11.6 公分的特 性,經由比較不同時期數據,萃取出差異 過大於 11.6 公分的監測面區塊,藉由相關 影像資料,人工判別該監測面是否為地物 變遷可能而加以剔除。 2. 以高程差分布圖過濾:觀察監測面高 程差與週遭鄰近的監測面高程差是否差 異過大,配合相關影像資料,以人工排除 可能的異常資料。
3. 以可能變遷地區範圍過濾:透過所蒐 集各年度之水準測量資料、GPS 觀測資 料、航拍照片、雷達影像、土地使用分區、 防洪公共設施等其他相關料,搜尋可能有 變遷的區域(如農業區內的耕地變動或道 路整修造成的地物變化),檢視該區域內的 數據是否有異常現象,如此可排除因地物 變遷造成的影響。 監測工作進行時需以相同的固定物 來 觀 察 其 不 同 時 期 的 變 化 , Song et al.(2002)研究認為雖然 LIDAR 實際的反 射強度和物質理論上的反射係數並不一 致,但還是會有相對大小的反射強度可供 區別。Matikainen et al.(2003) 則認為建物 與樹木的反射強度值有明顯的差異。因此 可將監測面在兩不同時期的平均反射強 度和平面坡度進一步約制排除地物變遷 植被覆蓋區,以萃取出道路、屋頂、運動 場、混凝土等平坦穩固之監測面,同時排 除農業耕作區等不適用於監測的區域。 1 考量反射強度 (1)、同時期反射係數之差異:將所有網格 內之原始點雲平均強度值與測區航空 正射影像(圖 5)套繪後觀察發現 97 年 柏油道路強度值大約介於 5~8 之間, 而屋頂、運動場、混凝土、人工草皮 面 等 人 工 結 構 物 強 度 值 大 多 介 於 14~18 之間,因此本研究擬以網格內平 均反射強度的相對大小來區別不同屬 性的監測面,期望提高穩固監測面萃 取的正確率。 (2)、不同時期反射強度之差異:由於測區 包含大區域的農耕區,農耕地屬不穩 定之監測面,會因不同時間而呈現不 同的面貌,例如剛插秧和收割前後的 水 稻 田 有 可 能 會 呈 現 不 同 的 反 射 強 度,本研究將嘗試以前後兩年監測面 平均強度值的差異大小來排除變化較 大的農耕區。 2 考量坡度差異 若前後兩年穩定監測面的空間平面 方程式分別以式(1)、(2)表示 Z = a1X + b1Y + c1 (1) Z = a2X + b2Y + c2 (2) 則當前後兩年的空間平面是穩固不 變時,理論上 a1/b1和 a2/b2的比值(可代表 坡度大小之變化)應該為 1,但考慮各種誤 差的影響,其比值即使不為 1 也應趨近於 1,且二平面的空間夾角也不應太大,本 研究於萃取監測面時,將嘗試以前後兩年 同一空間平面的坡度差異大小和平面夾 角差異大小來萃取穩固的監測面。 (四)、正確的大地起伏模式 由於空載光達儀器測量產出的點 雲高程是 WGS84 座標系統的橢球高,而 實驗區內現有高程卻是以基隆平均海水 面為基準的正高系統,因此以空載光達成 果製作 DSM、DEM 等數值成果時,需經 過大地起伏模式的轉換,而近年來常被大 地測量界學者應用於計算大地起伏的方 法有:Molodensky 法、最小二乘配置法 (least squares collocation, LSC)、Stokes' 積分公式和以 deflection-geoid 公式推求大 地起伏等(呂誌強,2004)。許海龍(2007) 於雲林地層下陷地區地形變遷調查研究 中,以測區內選定均勻分布的 20 個已知 控制點佈設 1.2m×1.2m 的板標,並以(1) 反射強度值、(2)周遭點位高程差異及(3) 點位間最遠距離小於 1.2m 的三個條件, 辨識出落在板標上的點雲資料後,繼而將 雷射點雲高程成果與已知點位高程作比 對,建立高程修正模式。但因本次實驗區 每年地層下陷量不大,且人工板標測定水
準高程亦需要較高的人力成本,為節省成 本並減少大地起伏改正的干擾,擬直接以 不同時期的 WGS84 點雲成果來比較高程 的變化,而不以經大地起伏改正後的正高 高程來比較,但 DSM、DEM 的製作則將 參考上述水利署高程修正的模式來改正 不同座標系統間大地起伏的差異,以方便 該三維空間資訊成果的後續利用。 而 DSM、DEM 乃利用 TerraScan 自 動濾除及進行人工編輯後,分類所成地面 點及非地面點後,以 1/2500 圖幅進行分區 儲存,且各區間重疊 5 米。至於實驗區現 有空載光達資料搜集,乃詢問各政府機關 及民間公司是否曾進行實驗區類似計畫 並發文加以蒐集相關資料。
五、主要研究成果
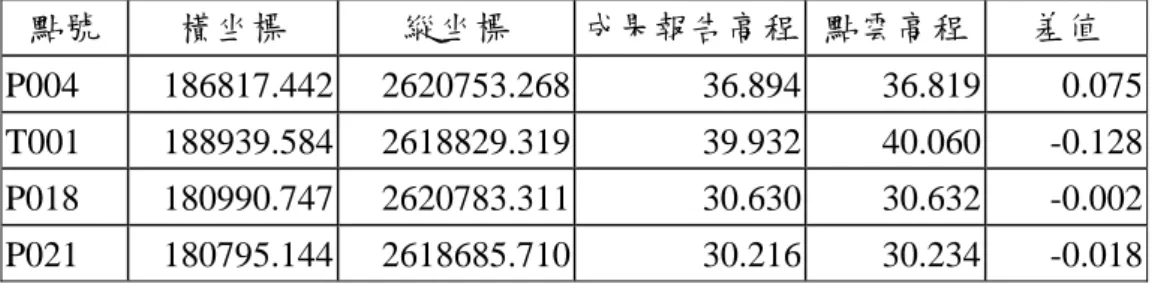
本研究空載光達實驗區的選定,係以 台灣西部沿海區域,地勢低窪坡降平緩, 且受地層下陷影響,普遍存在排水不良問 題的雲林縣為主,實驗區橫跨下陷速率較 大的雲林縣元長鄉、土庫鄉(年平均地層下 陷速率請參考圖 4),其西南角坐標約為 (2618900m, 178800m)、東北角坐標約為 (2620900m, 188800m),長為 10 公里、寬 2 公里的範圍(如圖 5 粉紅色框位置)。 5.1 空載光達資料之蒐集 本年度空載光達資料之掃描時參數 之設定如表 3 所示,且地面主站之選用以 96 年水利署雲林地層下陷計畫中所用之 基站(PA01、PA02)(許海龍,2007),原則 上掃描時之視角(Field Of View, FOV)不應 過大以獲得良好反射及足夠密度之雷射 點。 經 97.3.15~16 兩日飛行,其成果如圖 6。共計東西向 11 條及交叉航線 3 條。利 用 TerraScan 自動濾除及必要人工編輯 後,可分類地面點及非地面點,由於資料 量相當大,故利用 1/2500 圖幅進行區塊切 割,此 1/2500 分之一圖幅經處理為各重疊 5 米之正交網格,分類範例如圖 7。其中 橘色點為分類後之地面點位。而經由分類 完成後,地面點及可用來內差成一公尺規 則網格之 DEM,成果如圖 8。 此外,本計劃於 97 年 4 月 25 日赴現 場以 VRS GPS 實地施測 10 個檢核點(圖 9 中編號 P 開頭之點位),檢核後之成果精度 表如表 4。其高程差平均值約 2 公分,檢 核精度已可達 5cm 以內,符合當初設計, 亦即以年下陷量達 11.6 公分的地區,觀測 頻率每年施測一次,觀測精度至少需達 5.8 公分(2 倍σ < 11.6 公分)之設計目標。 接下來進行加入地面已知控制點進 行約制改正點雲高程:即於測試區選定高 程約制控制點,比較該點上內插雷射點之 高程較差值,建立橢球高程修正模式,再 利用此模式進行全區雷射點之高程修正。 如表 6 即以表 5 中四點為高程約制 點,計算實測橢球高和點雲高程,求四點 之差量(如表 5 所示),以此差量為基準並 利用雙線性內插計算其餘 6 個檢核點所需 改正之改正量,如表 6,而改正後與實測 橢球高之關係亦顯示於表 6 中。顯示其高 程平均差異量為 0.060m,而高程 RMSE 為 0.024m。 由於僅有 6 點檢核點,因此將位於試 驗區之特殊設計之板標所測之 VRS GPS 高程加入後選取約制點進行改正量計算 並計算其餘檢核點坐標。其中板標 W061 無點雲資料,試驗中發現 T002 高程差異 較大因此捨去不用,X120A 雖遠離測區, 但因為在交叉航帶上,所以有點雲資料。 接著以 P004、T001、P018、P021 四點高 程控制點約制後計算實測橢球高和點雲高程,經雙線性內插計算檢核點之改正 量,如表 7 以此差量為基準並利用雙線性 內插計算 9 個檢核點所需改正之改正量, 如表 8,而改正後與實測橢球高之關係亦 顯示於表 8 中。顯示其高程平均差異量為 0.46m,而高程 RMSE 為 0.028m。 由表 6 和表 8 顯示經特定高程點約制 之後,其高程檢核之 RMSE 約在 3 公分之 內,因此對後續進行地層下陷量計算有其 助益。 而在現有資料之蒐集上,透過發文經 濟部水利署,本計劃已順利取得 2007 年 經濟部水利署「雲林地層下陷地區地形變 遷調查研究」中相關資料一批,並已經運 用於初步研究地層下陷之分析模式,以及 發表論文”應用空載光達測量技術於地層 下陷監測之研究”於 2008 年第 27 屆測量 及空間資訊研討會。 而正高系統的 DSM、DEM 的製作則 已經參考水利署高程修正的模式來製作 完成並交付相關子計畫進行後續利用。 5.2 監測面萃取 本小節探討分析以第四節所探討之 因素進行監測面萃取之比較分析,試驗中 除使用本年度(97)所規劃設計掃描之資料 外,96 年光達資料係引用經濟部水利署 96 年「雲林地層下陷地區地形變遷調查研 究 」 之 部 份 掃 描 資 料 , 該 掃 描 資 料 原 WGS84 航帶平差成果經轉換為正高系統 後並無保留存檔,故本研究目前使用之 WGS84 點雲資料尚未經過航帶平差。且 由於飛航並非針對本研究試驗區特性而 規劃,因此使用之點雲資料係擷取涵蓋測 區 59 條航帶中的部份掃描資料。 本次 97 年空載光達測量成果第四節 所述之規劃,航帶平差所使用之共軛面 (Tie Surface)其高程精度(內部精度)為 3.0 公分, 而 96 年高程精度(內部精度)為 4.6 公分。 此外,本實驗區屬農業耕作區域,其 中 78 號東西快速道路橫貫經過,高速鐵 路位於東側並由東北往西南方穿越,區內 分佈少數小型村鎮而無大型城市,因此在 遮蔽物少且地勢平坦的現況條件下,有利 空載光達的作業。但由於農業耕作區內的 地表將因耕作而有所變動,此將不利於穩 固監測面的選定。 而 96、97 年平均反射強度(詳表 5)分 布不同,本研究僅將 96 年所有點雲平均 反射強度乘以 0.6 簡單改正至與 97 年平均 反射強度一致,以供後續反射強度比對之 用。 目前監測面以每一網格面內含 100 個 光達點為原則,配合 96、97 年空載光達 掃描密度(詳表 5),將測區劃分為 5 米見方 大小的 80 萬個網格(監測面),供後續分析 其屬性(即平面坡度及平均反射強度)是否 符合監測之所需。 監測面選取除了以 5 米見方網格考慮 其平坦度及擬合平面精度之外;另外就是 除上述條件外,再加上擬合平面的坡度差 異及平均反射強度差異約制,茲將監測面 選取結果說明如下: (1).監測面萃取成果 將測區劃分為 5 米見方網格,且網格 擬合平面平坦度在 5 度以內,擬合平面精 度在 4.6 公分以內,共可過濾出 106,505 個網格面,平均高程差為-13.4 公分。由於 高程差含有一些較大的異常數據(可能為 填土區或開挖區),導致高程差分佈的統計 圖範圍有過大的情況(如圖 9),因此取 95% 的信賴區間排除異常數據之干擾,以 2.5% 及 97.5%的位數-32.0 公分及 5.0 公分為高 程差過濾範圍,可得新的高程差分佈情況
(如圖 10),共計有 101,154 個網格面,經 統計高程差平均值為-13.7 公分。 接下來,由 101,154 個網格面,限制 擬合平面前後兩年之 a、b 的係數比(即坡 度差異約制)在 80%~120%之間(差異在 20%之內),二空間平面夾角差異在 2 度以 內,前後兩年之平均反射強度差異在 20% 以內,萃取監測面,並套繪於正射影像上 以人工判定監測面是否為穩固面,此為萃 取法 1,其結果詳見表 10。如再將萃取時 將平均反射強度區分為 5~8(柏油路面)及 14~18(道路、屋頂、運動場、混凝土、人 工草皮面)二種時,由其組合得萃取法 2、 3、4,萃取結果詳見表 10。 5.3 初步成果分析 以下分析皆以全區高程差 95%的信 賴區間(即-32.0 公分~5.0 公分之間)來排除 少數高程差異常的數據。 1、在只考慮網格擬合面之平坦度與精度 時,萃取出 101,154 個網格面。由於本 法萃取數量大,並未以人工辨識方式 統計穩固監測面正確萃取的百分比。 2、萃取時加上擬合平面坡度與夾角約制 以及平均反射強度差異約制時(萃取法 1),可萃取出正確率為 62%的穩固網格 監測面。 3、萃取時針對反射強度分類出的 5~8(柏 油路面)及 14~18(道路、屋頂、運動場、 混凝土、人工草皮面)兩種地物(萃取法 4),可提高穩固網格監測面萃取正確率 至 80%。 4、引用之 96 年成果其正高檢核之外部精 度雖可達 3.5 公分,但卻缺少 WGS84 橢球高的外部精度,因此本研究為配 合 96 年成果,96、97 年均以內部精度 來計算相關的萃取參數,實驗結果顯 示,因不同精度大小訂出的萃取參數 雖會影響監測面的萃取數量,但對穩 固監測面的正確率影響並不大。 5、测區內的高速鐵路於本研究中並未萃 取出任何可用之監測面,究其原因係 高鐵高架橋面寬僅約 13 米,除兩側翼 牆 妨 礙 光 達 的 掃 描 外 , 橋 面 上 的道 板、道渣與兩側電纜人行道高度均不 同,導致無法萃取出 5 米見方的平坦 監測面,如需以空載光達測量對高鐵 進行監測,可能需要更小的監測面來 進行分析。
六、結論
本子計畫依原定目標進行,已有初步 之成果,初步確定應用於地層下陷的空載 光達資料掃瞄作業方式與精度評估,完成 實驗區第一年期的空載光達資料蒐集,以 及試驗區的 DSM、DEM 資料的產製並提 供作為其他子計畫使用。而也順利蒐集實 驗區現有空載光達資料一批,並初步完成 穩定的監測面與地層下陷之分析模式,第 二年除將繼續探討如何提升空載光達資 料高程精度之外,並將確認地層下陷之分 析模式,續將使用所蒐集到的資料進行更 深一步之分析與探討。 空載光達測量具備快速、不受天候影 響的特性,且此技術日益精進成熟,若可 運用於地層下陷工作中的地表監測,不但 可節省大量的人力及經費,且全面的地層 下陷資料可提供更完整的研究與分析。因 此除了 97 年於測區內施测 GPS 高程測量 外,將於後續計畫中繼續施測主站以外之 GPS 高 程 測 量 來 約 制 全 區 點 雲 的 橢 球 高,以改善此方面誤差的影響。 此外,本子計畫研究雖僅以空載光達測量獲取的三維空間資料及反射強度萃 取監測面計算地層下陷量,穩固監測面萃 取正確率可達 80%。將來如能搭配近紅外 光航空影像,利用植生指數(NDVI)來排除 摘種農作物的農耕區,或許能萃取更多、 更正確的穩固監測面,進一步提高地表監 測工作的自動化。
七、致謝
本研究感謝經濟部水利署提供 96 年 空載光達資料,並承蒙行政院國家科學委 員 會 支 持 之 研 究 計 畫 (NSC 96-2625-Z-004-002)經費支援。參考文獻
1. Ackermann, F. 1999,Airborne laser scanning - present status and future expectations. ISPRS Journal of
Photogrammetry & Remote Sensing. 54
2. Crombaghs,M.J.E.,Brugelmann,2000,On the adjustment of overlapping strips of. laseraltimeter height data, International Archives of Photogrammetry and Remote. Sensing, Vol. XXXIII, Part B3,230-237
3. Elberink.Oude, S., Brand, G., Brugelmann, R.,2003,Quality
improvement of laser altimetry DEM's, International Archives of
Photogrammetry and Remote Sensing, vol. 34, part 3/W13,proceedings of the ISPRS workshop III/3 "3-D
reconstruction from airborne laserscanner and InSAR data", Germany: Dresden: 51-58.
4. Maas, H.G., 2002. Methods for measuring height and planimetry discrepancies in airborne laserscanner
data. Photogrammetric Engineering and Remote Sensing, 68, 933-940.
5. Maune, David F., 2001,Digital Elevation Model Technologies and Application:The DEM User Manual, ASPRS, 431~434
6. Morin, Kristian Walker, 2002,
Calibration of Airborne Laser Scanners, UCGE Report Number 20179
7. Song, J.-H., Han, S.-H., Yu, K., and Kim, Y.-I., 2002,Assessing the possibility of land-cover classification using LIDAR intensity data. In: The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. 34, Part 3B, 259-262.
8. Tao, Guo and Yoshifumi Yasuoka, 2004, Combining high-resolution satellite imagery and airborne laser scanning data for generating bareland DEM in urban areas, Proceedings of
International Workshop on Visualization and Animation of Landscape, International Archives of Photogrammetry, Remote Sensing and Spatial Information Science, Kunming, China, 26-28.
9. Lohr, U., A. Hellmeier, L. Barruncho, 2004, Precise LIDAR data - an efficient way to build up virtual 3D city models, Proceedings of the International Workshop on Vision Technologies Applied to the Rehabilitation of City Centres, Lisbon, Portugal,
http://lusiglob.edinfor.logicacmg.com/por tal/ docs/Lisbon_LHB_2004.pdf.
10. Habib, Ayman Fawzy, Rita Wai Ting Cheng, Eui-Myoung Kim, Edson
Aparecido Mitishita, Richard Frayne, and Janet Lenore Ronsky, 2006 ,Automatic Surface Matching for the Registration of LIDAR Data and MR Imagery,
Electronics and Telecommunications Research Institute Journal, vol.28, no.2:162-174.
11. Latypov.D,2002,Estimating relative LIDAR accuracy information from overlapping flight lines,ISPRS Journal of Photogrammetry and Remote Sensing 56 (2002) (4):236-245.
12. Matikainen, L., Hyyppa, J., and
Hyyppa, H., 2003. Automatic detection of buildings from laser scanner data for map updating. In: The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. 34, Part 3/W13,218-224
13. Renslow M., 2001,Development of A Bare Ground DEM and Canopy Layer In NW Forestlands Using High
Performance LIDAR,ESRI international user conference. 14. 內政部,2005,「辦理 LIDAR 測 區之高精度及高解析度數值地形測 繪、資料庫建置與應用推廣工作案期中 報告-2」。共 141 頁,工研院能資所執 行。 15. 王志添、王顯達、陳滌清、陳乃 宇、梁隆鑫,2001,雷達差分干涉法應 用於地層下陷研究。航測及遙測學 刊 ,第六卷,第一期,第 283-295 頁, 民國 90 年 3 月。 16. 史天元、彭淼祥,2003,「空載雷 射掃描數據精度評估程序之研究」,第 二十一屆測量學術及應用研討會論文 集,247-256。 17. 呂誌強,2004,「DEM 解析度對 大地起伏模式之影響」,國立交通大學 土木工程學系,碩士論文:新竹。 18. 洪偉嘉、柳志錫、黃鎮臺、劉進 金,2006,應用 GPS 監測地層下陷。 website: http://www.subsidence.org.tw/ 更新日期 Oct 01 2006;取用日期 2006 年 12 月 12 日。 19. 彭淼祥、史天元、楊名、劉進金, 2001,「雲林地層下陷高程監測」。第二 十屆測量學術及應用研討會,論文編號 B1,337-344。 20. 許海龍,2007,「雲林地層下陷地 區地形變遷調查研究」,台北市/經濟部 水利署。 21. 陳大科、石佳惠、施萍芬、王成 機,2005,「空載光達資料航帶平差之 精度探討」,第 24 屆測量學術及應用研 討會,123-131 22. 柳志錫、諶凱英,2006,「地層下 陷之監測方法」。 http://www.subsidence.org.tw/,取用日期 2008 年 02 月 18 日 23. 高玉惠、黃偉城、林東裕,2005, 「GPS 動態軌跡解算於空載 LIDAR 點雲成果精度之探討」,內政部『辦理 LIDAR 測區之高精度及高解析度數值 地形測繪、資料庫建置與應用推廣工作 案』成果發表暨應用研討會,247-255 24. 劉榮寬、徐偉城、史天元、劉進 金,「空載光達系統率定初探」,第 24 屆測量學術及應用研討會,447-456 25. 經濟部水利署,2006,「高鐵雲林 沿線地層下陷及行車安全」。 http://www.wra.gov.tw/ct.asp?xItem=260
91&ctNode=5281&comefrom=lp,取用 日期:2008 年 02 月 18 日。 26. 劉進金,2005,「空載光達技術之 發展現況空載光達技術之發展現況」, 「國內高解析空載及衛載遙測之現況 及未來」研討會,93 年 10 月 8 日。行 政院農業委員會及國立中央大學太空 及遙測研究中心共同主辦。 27. 謝嘉聲、史天元,2006,以雷達 干涉技術偵測地表變形之研究。website: http://www.subsidence.org.tw/ 更新日期 Oct 01 2006;取用日期 2006 年 12 月 12 日。 以歷史航測影像製作多時序數值 地形模型於地層下陷監測之應用 以空載光達進行 地層下陷監測之研究 以雷達影像進行 地層下陷與災害環境監測之研究 地層下陷區域三維空間資訊之 建立及展現 多時序及多來源DEM比較分析及 三維空間資訊在災害模擬之應用 圖 1 整體計畫之子計畫關聯圖 圗 2 空載光達的測量原理圖示(Renslow, 2001)
圖 3 計畫研究流程圖
表1 面積大小與精度的關係(Latypov,2002)
圖4 實驗區年平均地層下陷速率圖 (經濟部水利署,2008) 表 3 空載雷射掃描規劃參數表 參數 地點 航線數 離地高 (m) 航高 (m) 航速 (km/h) 掃瞄角度 (deg.) 雷射脈衝率 (KHz) 掃描頻率 (Hz) 掃描帶寬 (m) 重疊帶寬 (m) 下陷區 10 600 600 154 ±15 33 33 322 96(30%) 交叉航線 3 600 600 154 ±15 33 33 322 96 總計 13 圖 5 掃描航線規劃圖
圖 6 掃描航線成果圖
圖 8 一米 DEM 成果範例
表 4 檢核成果精度表(高程系統:TWD97 橢球高、平面系統:TWD97 、單位:公尺) 點號 橫坐標 縱坐標 檢測點高程 DEM高程 高程差量 P002 187628.712 2620192.374 36.558 36.596 0.038 P004 186817.442 2620753.268 36.894 36.819 -0.075 P005 186798.575 2618760.414 37.341 37.381 0.040 P007 186440.987 2619656.473 35.509 35.521 0.012 P009 184704.657 2620909.960 33.653 33.673 0.020 P010 185315.787 2619108.996 34.039 34.133 0.094 P012 183843.415 2619559.521 33.591 33.632 0.041 P014 183126.508 2620810.028 32.298 32.329 0.031 P018 180990.747 2620783.311 30.630 30.632 0.002 P021 180795.144 2618685.710 30.216 30.234 0.018 高程差平均值 0.022 高程差最小值 -0.075 高程差最大值 0.094 高程差標準偏差 0.042 表 5 P4、P5、P18、P21 實測 VRS GPS 橢球高和點雲高程之差異 點號 橫坐標 縱坐標 VRS GPS 橢球高 點雲高程 差異 P004 186817.442 2620753.268 36.894 36.819 0.075 P005 186798.575 2618760.414 37.341 37.381 -0.040 P018 180990.747 2620783.311 30.630 30.632 -0.002 P021 180795.144 2618685.710 30.216 30.234 -0.018 表 6 表 5 中以四點為高程約制點進行點雲高程雙線性內插改正後與實測橢球高之關係 點號 E N H 原點雲高 雙線性改正量 改正點雲高 差值 P002 187628.712 2620192.374 36.558 36.596 0.050 36.646 0.088 P007 186440.987 2619656.473 35.509 35.521 0.012 35.533 0.024 P009 184704.657 2620909.960 33.653 33.673 0.052 33.725 0.072 P010 185315.787 2619108.996 34.039 34.133 -0.016 34.117 0.078 P012 183843.415 2619559.521 33.591 33.632 -0.002 33.630 0.039 P014 183126.508 2620810.028 32.298 32.329 0.027 32.356 0.058 平均差異 0.060 RMSE 0.024
表 7 P004、T001、P18、P021 實測 VRS GPS 橢球高和點雲高程之差異 點號 橫坐標 縱坐標 成果報告高程 點雲高程 差值 P004 186817.442 2620753.268 36.894 36.819 0.075 T001 188939.584 2618829.319 39.932 40.060 -0.128 P018 180990.747 2620783.311 30.630 30.632 -0.002 P021 180795.144 2618685.710 30.216 30.234 -0.018 表 8 表 7 中以四點為高程約制點進行點雲高程雙線性內插改正後與實測橢球高之關係 點號 E N H 原點雲高 雙線性改正 改正點雲高 差值 P002 187628.712 2620192.374 36.558 36.596 0.034 36.630 0.072 P007 186440.987 2619656.473 35.509 35.521 -0.016 35.505 -0.004 P009 184704.657 2620909.960 33.653 33.673 0.058 33.731 0.078 P010 185315.787 2619108.996 34.039 34.133 -0.051 34.082 0.043 P012 183843.415 2619559.521 33.591 33.632 -0.018 33.614 0.023 P014 183126.508 2620810.028 32.298 32.329 0.030 32.359 0.061 P005 186798.575 2618760.414 37.341 37.381 -0.093 37.288 0.045 N005A 187637.957 2618913.811 37.163 37.274 -0.088 37.186 0.023 X120A 181095.216 2621712.470 32.636 32.700 0.010 32.710 0.074 平均差異 0.046 RMSE 0.028 表 9、兩不同時期空載光達測量之飛航參數及相關統計資料 飛航日期 96.2.4 97.3.16 航線數(條) 59 13 離地高(公尺) 600 600 航速(公里/時) 166 154 掃瞄角度(度) ±15 ±15 雷射脈衝率(千赫茲) 50 33 掃描頻率(千赫茲) 43 33 掃描帶寬(公尺) 322 322 航帶重疊(%) 30 30 雷射點密度(點/平方公尺) 5.2 3.4 內部精度(公分) 4.6 3.0 地面主站(名稱) PA01 PA02 PA01 PA02 有效網格數(個) 799,503 797,094 平均高程(公尺) 33.56 33.39 平均反射強度 14.4 8.6
130. 0 110. 0 90. 0 70 .0 50 .0 30.0 10. 0 -10 .0 -30 .0 -50 .0 -7 0.0 -90 .0 -11 0.0 高程差 次數 40000 30000 20000 10000 0 標準差 = 11 平均數 = -1 N = 106505. 6.0 4.0 2.0 0.0 -2 .0 -4.0 -6.0 -8.0 -10.0 -12.0 -14.0 -16.0 -18.0 -20.0 -22.0 -24.0 -26. 0 -28.0 -30.0 -32.0 高程差 次數 10000 8000 6000 4000 2000 0 標準差 = 8.60 平均數 = -13.7 N = 101154.00 圖 9 不考慮是否為穩固監測面 高程差異統計 圖 10 95%信賴區間的高程差異統計 表 10、不同條件監測面萃取與計算結果 項目 萃 取法 1 2 3 4 平面平坦度 5 度以內 擬合平面精度 4.6 公分以內 高程差範圍(95%) -32.0 公分~5.0 公分 平均反射強度差異 20%以內 平面係數差異 (坡度差異) 20%以內 平面夾角差異 2 度以內 平均反射強度約制 無 5~8 14~18 5~8 & 14~18 自動萃取網格數量 1671 個 562 個 121 個 683 個 經人工辨識為穩固 網格面之數量 1031 個 438 個 105 個 543 個 正確率(穩固/萃取) 62% 78% 87% 80% 穩固網格面分佈圖 圖 11 ── ── 圖 12 圖 11、萃取法 1 穩固網格面分佈情況
圖 12、萃取法 4 穩固網格面分佈情況