Remote Sensing Image Rectification
Ke-Sheng Cheng,*
,†
Hui-Chung Yeh,* and Chang-Hsuan Tsai*
R
ectification of a remote sensing image is commonly done matically over the last decade. No remote sensing imagesare free of geometric distortions and an essential
require-by applying polynomial regression models to image
coordi-nates and map coordicoordi-nates of ground control points. A ment for integrated processing of remote sensing images
and data from geographic information systems (GIS) is
major drawback of the polynomial regression model is
that it does not capture the random characteristic of ter- that they are spatially referenced. The geometric
distor-tions inherent in remote sensing images fall into two
cat-rain elevation. In fact, the distortion of a remote sensing
image is attributed to the variation of terrain elevation egories, the systematic and nonsystematic distortions.
Image rectification, a process by which the geometry of
and orbital parameters, the variations being random in
nature. A more effective approach of remote sensing im- an image area is made planimetric (Haralick, 1973;
Scho-wengerdt, 1997), must be performed prior to any
subse-age rectification is a stochastic approach that takes into
quent analyses. Many factors, such as scan skew, mirror
account the spatial variation structure of terrain
eleva-scan velocity, panoramic distortion, platform velocity,
tion. This article presents an anisotropic spatial modeling
curvature of the earth, and earth rotation, contribute to
approach of image rectification using ordinary kriging
the systematic distortions. This type of distortions can be
estimation. By considering the residuals of polynomial
rectified using data from platform ephemeris and
knowl-trend mapping as anisotropic random fields, the
pro-edge of internal sensor distortion. Nonsystematic
distor-posed approach models separately the spatial variation
tions arise from sensor system’s attitude, velocity, and
al-structures of the residuals in X and Y directions, and
em-titude, and can be corrected only through the use of
ploys the ordinary kriging method for spatial
interpola-ground control points (GCPs) (Jensen, 1986). In
particu-tion of the residual random fields. By means of a cross
lar, topographic, or relief displacement due to terrain
validation procedure, residuals of image rectification by
variation is usually the most serious of the displacement
the polynomial trend mapping, the multiquadric
interpo-types, especially in mountainous terrain (Paine, 1981).
lation function, and the ordinary kriging approaches are
There are essentially two different categories of image
compared. The ordinary kriging approach yields smallest
rectification techniques. One is the deterministic
ap-variances and root-mean-squared of mapping errors.
proach that establishes models for the nature and
magni-Elsevier Science Inc., 2000
tude of the sources of distortion and uses these models to establish correction formulae. The deterministic ap-proach relies on data of the flight parameters and the
INTRODUCTION
terrain information, and is effective when the types of Integration of remote sensing images and other geographic distortion are well characterized, such as that caused by information for various applications has increased dra- earth rotation (Richards, 1995). The other approach of image rectification is the statistical approach, which, by means of a GCP data set, establishes mathematical
rela-* Agricultural Engineering Department, National Taiwan
Univer-tionship between image coordinates and their
corre-sity, Taiwan, Republic of China
† Hydrotech Research Institute, National Taiwan University, Tai- sponding map coordinates using standard statistical
pro-wan, Republic of China cedures. These relationships can be used to correct the Address correspondence to K.-S. Cheng, Agricultural Engineering image geometry irrespective of the analyst’s knowledge Department and Hydrotech Research Inst., National Taiwan Univ.,
Tai-of the source and type Tai-of distortion (Richards, 1995).
wan, Republic of China. E-mail: [email protected]
Received 14 June 1999; revised 17 December 1999. The most widely used method in this category is the
REMOTE SENS. ENVIRON. 73:46–54 (2000)
Elsevier Science Inc., 2000 0034-4257/00/$–see front matter 655 Avenue of the Americas, New York, NY 10010 PII S0034-4257(00)00079-1
polynomial trend mapping (PTM) technique that em- polation. This study only deals with the geometric cor-ploys polynomial regression equations to relate image co- rection, and the process of pixel resampling is not part ordinates and their corresponding map coordinates. The of our investigation. We introduce the PTM and MIF order of polynomials to be used depends on the image geometric correction algorithms in this section.
sources and the terrain variation in the scene. For
air-borne images or images from areas of rugged terrain, Polynomial Trend Mapping
more severe distortions present and higher order polyno- Let (x, y) be the image coordinate of a pixel and (X, Y) mials are used. In contrast, affine transformation, a first- be its corresponding map coordinate. Also let (Xˆ, Yˆ) be order polynomial, may be sufficient to rectify satellite estimate of the map coordinate (X, Y) by a polynomial images. An extended model of the conventional polyno- transformation. General form of the PTM algorithm is mial mapping is the Hardy’s multiquadric interpolation given in Eqs. (1a) and (1b):
function (MIF), which yields zero errors for coordinate
mapping at GCPs (Hardy, 1990; Star et al., 1997). The Xˆ⫽
兺
n
i⫽0
兺
i
j⫽0
aijxi⫺jyj, (1a)
MIF method employs a distance-weighting algorithm to
adjust residuals from the PTM method. Yˆ⫽
兺
ni⫽0
兺
i
j⫽0
bijxi⫺jyj. (1b)
Work of recent research (Malinverno, 1988; Turcotte, 1988; Chile`s, and Delfiner, 1999) has shown that terrain
Here n is the order of the polynomial model, and the variation is random in nature and can be modeled as a
ran-coefficients aij and bij are estimated by least-squares
re-dom field. Therefore, distortions raised by terrain
varia-gression analysis. The PTM is basically a statistical trend tion are randomly distributed over the spatial extent of
surface mapping model. Using a set of m GCPs, [(xk, yk);
an image. Neither the polynomial trend mapping nor the
(Xk, Yk)], k⫽1, 2, . . ., m, it finds the best-fit surface for
multiquadric interpolation function considers the spatial
the GCP data set. As was introduced earlier, low order variation structure of the terrain elevation. In this study
polynomials are used to rectify images with less geomet-we propose an alternative approach of image rectification
ric distortions, like satellite images from a flat region. by kriging. Kriging is a group of spatial interpolation
Geometric distortions like scale, translation, rotation, and methods based on the spatial correlation structure of the
skew effects can be modeled by an affine transformation random field under investigation. We adopted the
ordi-(n⫽1). Rectification of images from rugged terrain may nary kriging (OK), a linear, unbiased estimator with
min-require using higher order polynomials. However, in imum variance of estimation errors, for spatial
interpola-choosing the order of polynomials for image rectification, tion in this research.
one needs to be cautious that higher order polynomials The organization of this paper is as follows. The next
can lead to significant image distortions for regions out-section introduces the PTM and MIF algorithms of
im-side the range of the ground control points, although age rectification. The third section describes theory of the
they generally yield accurate fits in the vicinities of the ordinary kriging. The fourth section presents the algorithm
ground control points. of building a kriging model for image rectification. The fifth
section describes the method of accuracy assessment by
Multiquadric Interpolation Function
means of cross validation. An example is presented in the
sixth section to illustrate the proposed model and com- The MIF algorithm can be viewed as an extension of the pare the mapping accuracies by different approaches. PTM technique. The basic concept of this technique The final section presents some concluding remarks. is to adjust (Xˆ, Yˆ), the PTM estimate of map coordinate (X, Y), by means of a distance-weighted algorithm. The weights are determined such that the MIF mapping
er-GEOMETRIC CORRECTION ALGORITHMS
rors at ground control points are zero.
Since the statistical approach is commonly adopted for op- The first step of the MIF technique is to apply the erational purpose and is independent of the platform used PTM model with lower degree (1 or 2) polynomials to for data acquisition, we focus our study on modeling the the GCP data set, that is [Eqs. (2a) and (2b)],
geometric distortions based on ground control point
cor-Xˆk⫽a00⫹a10xk⫹a11yk⫹a20x2k⫹a21xkyk⫹a22y2k, (2a)
respondence. Ground control points are ground features
that can be delineated on a remotely sensed image and on Yˆk⫽b00⫹b10xk⫹b11yk⫹b20x2k⫹b21xkyk⫹b22y2k. (2b)
a corresponding map. Before proceeding, readers should
Let residuals of the PTM model at ground control points, be aware that geometric correction process described in
(Xk, Yk), k⫽1, 2, . . ., m, be (dXk, dYk) [Eqs. (3a) and (3b)]:
this article is only the first phase of a complete remote
sensing georeference process. It is followed by a resampl- dXk⫽Xk⫺Xˆk, (3a)
ing process, which interpolates digital numbers of pixels of
dYk⫽Yk⫺Yˆk. (3b)
the rectified image, using techniques like nearest
m} and the following steps to establish distance-weighted dY
0⫽
兺
m
k⫽1
f0kbk, (8b)
estimates for any non-GCP pixel (x0, y0) (Star et al., 1997).
(XˆM0, YˆM0)⫽(Xˆ0, Yˆ0)⫹(dX0, dY0). (9)
1. Calculate the distance between a non-GCP point
(x0, y0) and a GCP (xk, yk) [Eq. (4)]: Here, (Xˆ
0, Yˆ0) and (XˆM0, YˆM0) are the PTM and
MIF estimates of map coordinate (X0, Y0), respec-f0k(x0, y0)⫽
√
(x0⫺xk)2⫹(y0⫺yk)2. (4)tively. The MIF algorithm yields exact estima-2. Calculate the distance between two control points tions, that is, zero estimation errors, at ground GCP (xk, yk) and GCP (xl, yl) [Eq. (5)]: control points since Eq. (6c) has a unique
solu-tion. The residuals at (x0, y0) are determined by fkl⫽
√
(xk⫺xl)2⫹(yk⫺yl)2. (5) summing the distance-weighted residuals, f0kak
and f0kbk, k⫽1, 2, . . ., m, contributed by all
3. Model the residuals (dXk, dYk), k⫽1, 2, . . ., m, by
ground control points. the following matrix equations:
THEORY OF THE ORDINARY KRIGING
冤
dX1 dX2 ⯗ dXm冥
⫽冤
f11 f12 . . . f1m f21 f22 . . . f2m ⯗ ⯗ ⯗ ⯗ fm1 fm2 . . . fmm冥
·冤
a1 a2 ⯗ am冥
, (6a)The PTM is basically a traditional trend surface mapping model. It finds the best-fit surface for the GCP data set. The MIF interpolates the residuals resulted from PTM by weighting residuals contributed by each ground con-trol point. Neither method considers the spatial variation
冤
dY1 dY2 ⯗ dYm冥
⫽冤
f11 f12 . . . f1m f21 f22 . . . f2m ⯗ ⯗ ⯗ ⯗ fm1 fm2 . . . fmm冥
·冤
b1 b2 ⯗ bm冥
, (6b)structure of terrain elevation. The terrain variation struc-ture may be nonlinear and anisotropic. In contrast, krig-ing is a group of spatial estimation methods that take or, equivalently,
into account the spatial variation of the random field un-der investigation. In this study, we apply the most widely
D⫽
冤
DDXY
冥
⫽⌿·冤
A
B
冥
, (6c) used ordinary kriging to remote sensing imagerectifica-tion and introduce briefly the theory of ordinary kriging where DX and DY represent vectors of residuals in
in this section.
X and Y directions, A and B are column vectors
Let Z(x) be a random field and z(x) be its realization of ak and bk, respectively, and ⌿ is the
inter-at a spinter-atial locinter-ation x. We wish to estiminter-ate an unknown GCP-distance matrix, that is [Eq. (6d)],
value z(x0) using observed data {z(xi), i⫽1, 2, . . ., m} and
combine them linearly with weights ki0:
⌿⫽
冤
F0 0F冥
, (6d)z*(x0)⫽
兺
m
i⫽1
ki0z(xi). (10)
with F being the distance matrix in Eqs. (6a)
and (6b). Here z*(x0) represents the ordinary kriging estimate of
4. Solve Eq. (6c) for ak and bk, k⫽1, 2, . . ., m, z(x0). The ordinary kriging assumes the following
second-order stationary properties [Eqs. (11a)., (11b), and (11c)]
冤
AB
冥
⫽⌿⫺1·冤
DXDY
冥
. (7) for the random field {Z(x), x苸⍀}:E[Z(x)]⫽lZ, (11a)
The solution is unique since there are m
equa-Var[Z(x)]⫽r2
Z, (11b)
tions for m unknowns in Eqs. (6a) and (6b).
Coef-ficients ak and bk can be viewed as the residuals Cov[Z(xi),Z(xj)]⫽Cov(|xi⫺xj|), (11c)
contributed by (xk, yk) per unit length of distance
where ⍀ represents the spatial extent of the study area. from point (xk, yk). From Eq. (7), we see that ak
We require the kriging estimator to be unbiased and have and bkdepend on the geometric layout of ground
minimum variance of estimation errors, that is [Eqs. (12a) control points, which is characterized by ⌿, and and (12b)]
the predetermined PTM residuals DX and DY. An
E[Z*(x0)]⫽E[Z(x0)], (12a)
implicit assumption of the MIF algorithm is that
residuals contributed by (xk, yk) are isotropic since minimizing Var[Z*(x0)⫺Z(x0)]. (12b)
the distance matrices F and ⌿ are independent
The unbiasedness condition [Eq. (12a)] is warranted with of directions.
unit-sum weights [Eq. (13)] 5. Perform a geometric interpolation at (x0, y0) by
Eqs. (8a), (8b), and (9):
兺
mi⫽1 ki0⫽1. (13) dX0⫽
兺
m k⫽1 f0kak, (8a)Table 1. Variogram Models
the two above constraints simultaneously. We achieve
this by introducing a Lagrange multiplierᐉ and minimiz- Influence
ing Eq. (14): Model Type Formula Range Sill
Exponential c(h)⫽x[1⫺exp(⫺h/a)] 3a x
M⬅Var[z*(x0)⫺z(x0)]⫺2ᐉ
冢
兺
m
i⫽1
ki0⫺1
冣
. (14)Spherical c(h)⫽
冦
x[3/2(h/a)⫺1/2(h/a)x3],, hh⭐a⬎a a xBy substituting
兺
m
i⫽1
ki0z(xi) for z*(x0) and differentiating M Gaussian c(h)⫽x[1⫺exp[⫺(h/a)2]] √3 a x Power c(h)⫽xha, a⬍2 ⫹∞ N/A
with respect to ki0’s and ᐉ, we obtain the ordinary
krig-ing system (Journel and Huijbregts, 1978)
兺
mj⫽1
ki0cij⫹ᐉ⫽ci0, i⫽1, 2, . . ., m,
eters: the influence range hc, the sill c(∞), and the
nug-get C0. The influence range is the minimum distance at
兺
mi⫽1
ki0⫽1, (15)
which two random variables Z(x) and Z(x⫹hc) become
independent. The sill is the lowest upper bound of the where cij⫽c(|xi⫺xj|) is the semivariogram, or simply the
variogram and is equal to r2
Z, the variance of Z(x). The
variogram, of the random field Z(x) and is defined in
nugget is used to model a discontinuity at the origin of Eq. (16):
the variogram. The variogram can be estimated using
ob-c(|xi⫺xj|)⫽1/2E{[Z(xi)⫺Z(xj)]2}. (16) served data {z(xi), i⫽1, 2, . . ., m}
Equation (15) can also be expressed in matrix form
cˆ(h)⫽ 1
2|N(h)|N(h)
兺
[z(xi)⫺z(xj)]2, h⬎0 (19)
where N(h)⬅{(xi, xj): |xi⫺xj|⫽h; i,j⫽1, 2, . . ., m}. The
function cˆ(h) is often termed the experimental
vario-冤
c11 . . . c1i . . . c1m 1 ⯗ ⯗ ⯗ ⯗ ⯗ ci1 . . . cii . . . cim 1 ⯗ ⯗ ⯗ ⯗ ⯗ cm1 . . . cmi . . . cmm 1 1 . . . 1 . . . 1 0冥
·冤
k10 ⯗ ki0 ⯗ km0 ᐉ冥
⫽冤
c10 ⯗ ci0 ⯗ cm0 1冥
. (17)gram. Variograms are conditionally negative definite
functions (Wackernagel, 1995) and permissible models (see Table 1) or their linear combinations are often used We solve the ordinary kriging system for kriging weights to fit experimental variograms.
ki0and then substitute them into Eq. (10) to obtain zˆ(x0), In some cases the spatial variation structures or the
the kriging estimate of z(x0). The variance of the estima- variograms may vary in different directions; then the
tion error, also known as the ordinary kriging variance, random field Z(x) is said to be anisotropic. For example, is given in Eq. (18) (Journel and Huijbregts, 1978): physical or environmental parameters such as rainfall and elevation may exhibit higher degree of variation in one
r2
ok⫽E{[Z(x0)⫺Zˆ(x0)]2}
direction than in the other direction. There are two types of anisotropy, the geometric anisotropy and the zonal an-⫽ᐉ⫹
兺
mi⫽1
ki0ci0. (18)
isotropy. The geometric anisotropy is characterized by varying influence ranges and constant sill in different di-The variogram represents spatial variation structure of
rections. For zonal anisotropy, both the influence range the random field Z(x). Figure 1 illustrates the typical
va-and sill vary with directions. In dealing with the geomet-riogram of a random field. A vageomet-riogram has three
param-Figure 1. Typical variogram of a random field.
Figure 2. Rose diagram of an anisotropic
rically anisotropic random field, we first identify the di- transformation function. In terms of kriging, it seems in-rections of maximum and minimum spatial variation by tuitively reasonable to define a random field Z(x, y) with constructing the rose diagram, an isovariogram ellipse as (x, y) being the image coordinate and Z(x, y) the east a function of influence ranges (see Fig. 2). We then re- (or north) map coordinate, and then estimate the map scale the distance between two spatial points (x1, y1) and coordinate Z(x0, y0) of a non-GCP pixel at (x0, y0) using
(x2, y2) by using the rotation angle w and the anisotropic ground control points {(xi, yi), i⫽1, 2, . . ., m} and Eqs.
ratio k [Eq. (20)]: (10) and (17). However, since (x, y) and Z(x, y), respec-tively, represent the image coordinate and map coordi-nate of the same pixel, the random field Z(x, y) is
non-h⫽
冪
[(x1⫺x2)cos w⫹(y1⫺y2)sin w] 2⫹ k2[(y
1⫺y2)cos w⫺(x1⫺x2)sin w]2 (20) stationary, and therefore violates the ordinary kriging’s
second-order stationarity assumption. This modeling ap-proach may encounter problems of fitting the experi-Then the spatial variation between any pair of (x1, y1) and
mental variograms with impermissible models, and we (x2, y2) is calculated by using the above h in the
vario-demonstrate this with an example in the Model Applica-gram model of the minimum variation axis.
tion section. In order to apply ordinary kriging to image rectification, we first model the trend present in the map-coordinate random field Z(x, y) by first-degree
poly-KRIGING APPROACH OF
nomials in Eqs. (21a) and (21b):
IMAGE RECTIFICATION
Xˆ⫽a00⫹a10x⫹a11y, (21a)
One may consider image rectification as the work of
map-ping image coordinates to map coordinates through a Yˆ⫽b00⫹b10x⫹b11y. (21b)
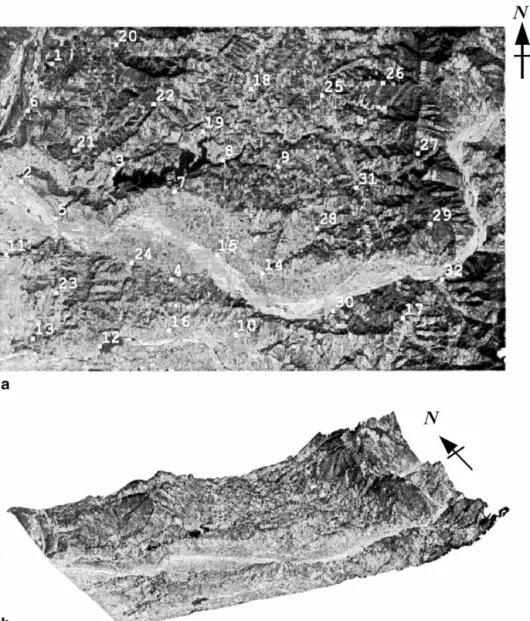
Figure 3. SPOT image of the study
We then consider the residuals dX and dY as two sepa- 3. Repeat steps 1 and 2 by returning the selected GCP and choosing another point, until all ground rate second-order stationary random fields, Z1(x, y) and
control points have been selected.
Z2(x, y), that is,
4. Calculate and compare the means and variances
Z1(x, y)⬅dX⫽X⫺Xˆ, (22a)
of (dXk, dYk), (dXMk, dYMk) and (dX*k, dY*k), k⫽1,
Z2(x, y)⬅dY⫽Y⫺Yˆ. (22b) 2, . . ., m. A better rectification model shall have
mean error close to zero and smaller variance of In the above equation, subscripts 1 and 2 correspond to
estimation errors.
X (east) and Y (north) directions, respectively. The
rea-son for using first-degree polynomials to model the trend Note that steps 1–3 of the cross validation establish of Z(x, y) is that using higher-degree polynomials in m sets of polynomial and variogram models. Based on
trend mapping may eliminate the embedding spatial vari- estimates of the cross validation procedure, we can also ation structure of the random field, and the residuals check the unbiasedness assumption of kriging [Eq. (12a)] would simply be noises. Variograms of the residual ran- and the coherence of kriging variance using Eqs. (25a) dom fields Z1(x, y) and Z2(x, y) must be estimated using and (25b):
Eq. (19) and fitted with permissible variogram models.
ME⫽1
m
兺
m
i⫽1
[z(xi)⫺z*(xi)]⬵0, (25a)
Let Z*1(x, y) and Z*2(x, y) be the ordinary kriging
esti-mates of Z1(x, y) and Z2(x, y), respectively, and they are
calculated using Eqs. (10) and (17). Finally, we calculate MRV⫽1
m
兺
m i⫽1 [z(xi)⫺z*(xi)]2 r2 ok,i ⬵1, (25b)the kriging estimate, (X*, Y*), of map coordinate (X, Y) using the following equations:
where r2
ok,i is the ordinary kriging variance at location xi.
X*⫽Xˆ⫹Z*1(x, y), (23a)
Y*⫽Yˆ⫹Z*2(x, y). (23b) Figure 4. Variogram parameter a of Z1(x, y) and Z2(x,
y) in different directions (influence range⫽3a). The final estimation errors of the map coordinate (X, Y)
by the kriging approach are
X⫺X*⫽X⫺Xˆ⫺Z*1(x, y)⫽Z1(x, y)⫺Z*1(x, y), (24a) Y⫺Y*⫽Y⫺Yˆ⫺Z*2(x, y)⫽Z2(x, y)⫺Z*2(x, y). (24b)
Equations (24a) and (24b) indicates that the final estima-tion errors of the kriging approach (X⫺X*, Y⫺Y*) are numerically the same as the kriging errors [Z1(x, y)⫺ Z*1(x, y), Z2(x, y)⫺Z*2(x, y)].
ACCURACY ASSESSMENT
Similar to the MIF technique, the ordinary kriging is also an exact interpolator that yields zero interpolation errors at data locations. In this study we apply a cross-validation technique to verify various assumptions about the ordi-nary kriging model and the data, and also to compare the mapping accuracies of different techniques. In the cross-validation procedure one removes each sample value at a time from the observed data set, and reestimates the removed data from remaining samples using the differ-ent polynomial or variogram models. The method of cross validation for accuracy assessment works as follows:
1. From the GCP data set {(xi, yi); (Xi, Yi), i⫽1, 2,
. . ., m}, choose any one point [(xk, yk); (Xk, Yk)]
and use the remaining GCPs to estimate (Xk, Yk)
by using the PTM, MIF, and ordinary kriging techniques.
2. Calculate the estimation errors. Let (dXk, dYk),
(dXMk, dYMk), and (dX*k, dY*k) be estimation errors
of the PTM, MIF, and the kriging approaches, re-spectively.
Figure 6. Power variogram of the east map ordinate.
冤
Xˆk Yˆk冥
⫽冤
20.1298 ⫺2.8702 ⫺2.8702 ⫺19.6934冥
·冤
yxkk冥
⫹冤
223499.217 2699844.881冥
. (26) We then removed the trend from Z(x, y) using Eqs. (22a) and (22b), and performed variogram analyses on residual random fields Z1(x, y) and Z2(x, y).Variogram Modeling
Experimental directional variograms of residual random fields Z1(x, y) and Z2(x, y) were fitted with exponential
models. The principal directions of anisotropy are 0⬚– 180⬚ (E–W) and 90⬚–270⬚ (N–S) for Z1(x, y), and 30⬚–
210⬚ and 120⬚–300⬚ for Z2(x, y), as demonstrated in
Fig-Figure 5. Major and minor directional variograms of Z1(x, ure 4. The anisotropic ratios are 2.51 and 2.33 in the east
y) and Z2(x, y).
and north directions, respectively. Within the study area, terrain variation is most significant in the E–W direction
MODEL APPLICATION and mild in the N–S direction, therefore, more severe
geometric distortions can be expected in the E–W direc-We apply the proposed ordinary kriging approach to a
tion. The fact that the principal directions of anisotropy test area in Northern Taiwan. The test area is 20 km by
for Z1(x, y) and Z2(x, y) are consistent with the principal
14 km in coverage, with terrain elevation ranging from
variation directions of terrain elevation demonstrates the 150 m to 1000 m above the mean sea level. A river flows
advantage of anisotropic variogram modeling. Figure 5 from east to west crossing the center of the study area.
illustrates the major and minor variograms of Z1(x, y) and
We used an unrectified SPOT satellite image (see Fig. 3)
Z2(x, y). Also, we mentioned in earlier section that
con-covering the study area to evaluate different rectification
structing variograms of the map coordinates X and Y techniques. A total of 32 ground control points were
se-without removing their trends may lead to fitting the ex-lected for model building. In the application we use the
perimental variograms with impermissible models. Fig-Universal Transverse Mercator (UTM) coordinates and
ure 6 shows the experimental variogram of the east ordi-image lines and columns for map and ordi-image
coordi-nates, respectively. nate X, along with its best-fit power model. Since the trend present in the east ordinates is not removed, the
Polynomial Trend best-fit power model has a degree of power exceeding
2.0, and therefore such variogram model is not per-Using the selected GCPs, the first-degree polynomial
trend present in the study area is given in Eq. (26): missible.
Table 2. Cross Validation of Kriging Estimates
Mean Error (m) Mean of Variance Ratio
Random Field (Unbiasedness) (Variance Coherence) Anisotropic Ratio k
Z1(Easting) ⫺0.22 1.06 2.52
Table 3. Statistical Properties of Rectification Errors
Rectification Errors
PTM PTM Multiquadric
(1st Degree (2nd Degree Interpolation
Polynomials) Polynomials) Function Ordinary Kriging
Parameter dXk dYk dXk dYk dXMk dYMk dX* dY*
Mean (m) 1.37 ⫺0.28 ⫺0.18 0.15 0.22 ⫺0.75 ⫺0.22 ⫺0.15 Variance (m2) 7978.59 876.30 7609.78 553.95 7368.94 642.27 4803.02 581.05 RMSE (m) 87.93 29.14 85.86 23.19 84.49 24.96 68.21 23.73
65.50a 62.89a 62.30a 51.07a
Absolute Rectification Errors
PTM PTM Multiquadric
(1st Degree (2nd Degree Interpolation
Polynomials) Polynomials) Function Ordinary Kriging
Parameter |dXk| |dYk| |dXk| |dYk| |dXMk| |dYMk| |dX*| |dY*|
Mean (m) 68.26 23.09 63.69 18.57 59.56 20.62 52.57 19.00 Variance (m2) 3171.13 326.06 3421.97 197.98 3706.87 203.94 1950.43 208.39
aOverall RMSE.
Accuracy Assessment application. Table 3 presents the statistical properties of
rectification errors (dXk, dYk), (dXMk, dYMk), and (dX*k,
The final estimates of map coordinates for all GCPs were
dY*k) based on the cross-validation procedures outlined
calculated using the anisotropic variogram models and
in previous section. The ordinary kriging approach yields Equations (10), (17), (23a), and (23b). Table 2 presents
smaller mean, variance and root-mean-square of estima-the results of cross-validation check of kriging estimates.
tion errors than the MIF and PTM with the first-degree The unbiasedness of kriging estimates (ME⯝0) and
co-polynomials. Although PTM with the second-degree herence of kriging variance (MRV⯝1) are well satisfied,
polynomials achieves slightly smaller mean and variance indicating the anisotropic variogram models and the
as-of estimation errors in the north direction than the krig-sumption of second-order stationarity for the residual
ing approach, their differences are negligible. More im-random fields Z1(x, y) and Z2(x, y) (after variogram
re-scaling using the anisotropic ratio) are adequate for this portantly, the kriging approach achieves approximately
visit to the Mathematics Department, University of Florida,
35–40% reductions in variance of estimation errors in the
during which this study was carried out. He is also grateful to
east direction than all other models. This improvement
the Mathematics Department of University of Florida for
pro-is admirable since the terrain variation and geometric viding excellent research environment. We also thank the anon-distortions are most significant in the east direction. Also, ymous reviewers for their constructive criticisms and
sugges-tions that were very helpful in revising the manuscript.
root-mean-square error (RMSE) of horizontal (east) di-rection is significantly higher than RMSE of vertical
(north) direction, indicating the rectification errors are REFERENCES mainly contributed by errors in the east direction. The
overall RMSE of the ordinary kriging is 51.07 m, 18–22%
Chile`s, J. P., and Delfiner, P. (1999), Geostatistics—Modeling lower than RMSE of other models. Finally the kriging
Spatial Uncertainty, Wiley, New York, pp. 449–451.
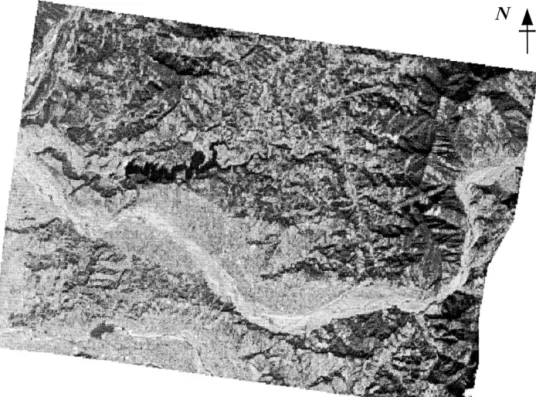
rectified image of the study area is shown in Figure 7. Haralick, R. M. (1973), Glossary and index to remotely sensed image pattern recognition concepts. Pattern Recognition 5: 391–403.
CONCLUSIONS
Hardy, R. L. (1990), Theory and applications of the multiquad-ric-biharmonic method. Comput. Math. Appl. 19(8/9):163–208. In this study we compare the accuracies of image
rectifi-Jensen, J. R. (1986), Introductory Digital Image Processing—A cation by polynomial trend mapping, multiquadric
inter-Remote Sensing Perspective, Prentice-Hall, Englewood
polation function, and ordinary kriging techniques. The
Cliffs, NJ, pp. 102–105. proposed ordinary kriging approach of image rectification
Journel, A. G., and Huijbregts, C. J. (1978), Mining Geostatis-considers the mapping errors resulted from traditional
tics, Academic, London, 600 pp.
polynomial trend mapping as two stationary random Malinverno, A. (1988), Testing linear models of sea-floor topog-fields. Anisotropic variogram modeling of the PTM resid- raphy. Pure Appl. Geophys. 131:139–156.
uals identifies the principal variation directions and then Paine, D. P. (1981), Aerial Photography and Image Interpreta-take into account the spatial variation structures of dif- tion for Resource Management, Wiley, New York, 571 pp.
Richards, J. A. (1995), Remote Sensing Digital Image Analysis, ferent directions. Results of the cross validation
demon-Springer-Verlag, Berlin, pp. 54–57. strate that ordinary kriging approach yields smaller
val-Schowengerdt, R. A. (1997), Remote Sensing—Models and Meth-ues of variance and root mean square of mapping errors
ods for Image Processing, Academic, San Diego, pp. 324–353.
than PTM and MIF techniques. This study demonstrates
Star, J. L., Estes, J. E., and McGwire, K. C. (1997), Integration the potential of applying the proposed ordinary kriging
of Geographic Information Systems and Remote Sensing,
approach to image rectification for both space-borne and Cambridge University Press, New York, pp. 18–25.
airborne images. Turcotte, D. L. (1998), Fractals in geology and geophysics. Pure
Appl. Geophys. 131:171–196.
Wackernagel, H. (1995), Multivariate Geostatistics,
Springer-Ver-The first author would like to thank the National Science