LINEAR-COMPLEXITY EQUALIZED MULTIMUSER RECEIVERS
FOR WIDEBAND CDMA IN TIME VARYING CHANNELS
Po-Wei Fu, and Kwang Cheng Chen
College
of
Electrical Engineering National Taiwan University, Taipei, Taiwan, R.O.C.
F A X :
+886 2 23683824
e-mail:
powei@euler.ee.nthu.edu.tw,
chenkc@cc.ee.ntu.edu.tw
Abstract
-
In practical environments, CDMA suffers from multiple access interference, inter-symbol interference, and other time-varying effects from the channel. We therefore derive linear complexity multi-user receivers by adaptive algorithms for non- stationary fiequency-selective fading channels. Time-varying tapped-delay-line channel model is adopted. Performances of these schemes are shown more effective.I.
INTRODUCTION
In a practical CDMA system there are two primary issues should be considered inter-symbol interference (ISI) and multiple access interference (MAT). Consequently, multi-user communication research about MAI and IS1 due to multi-path fading attracts great interests, with the application of wideband
CDMA
systems for high data rate and multi-rate services. IS1 effect likely from a dynamic frequency selective channel should be designed carehlly with MAI concerns. Such as the multi-path decorrelating receiver in [7], if it acts in a practical environment with more paths, the decorrelating filter will become a nearly singular matrix due to the orthogonal property between signature waveforms. Moreover, most multi-user communication studies usually assume that different users experience the same channel, especially while adopting equalization approach. However, in a multi-user system, different signals go through different paths and thus with different fading result at the receiver end. [6] treated each channel as an individual linear time invariant system during several symbol periods with a different impulse response. In fact, the channel characteristics are time varying and even non- stationary in mobile communication systems. Thus, we take advantage of a general time varying Tapped-Delay-Line channel model to develop low-complexity multi-user receiver in slow time-varying frequency selective fading environment.In this case, channel equalization is generally required to mitigate the effect of IS1 and also effective to reduce MAI. However, theoretical equalization methods require a priori knowledge of channel parameters, which implies the need of accurate channel estimates to invoke tremendous system complexity. Instead, we proceed without channel identification to derive multi-user receiver structures of linear complexity and implement them by adaptive schemes to adapt the channel variations.
11.
SYSTEM MODEL
We consider a synchronous CDMA system with
K
users transmitted over respective frequency-selective fading channels with additive white Gaussian noise (AWGN). The low-pass equivalent transmitted signal for the user k is: x, (t)= A ,2
b ,(ip,
(t-
iT)
(2.1) whereA,and Skare the transmitted amplitude and the signature waveform of thekth
user respectively. The data symbols of all users are i.i.d. and with baseband antipodal modulation. b, E @,-1}. Tis the symbol period. The signaturewaveform of the user
k
is:i= -m
S,(t)= yC,(jh(t- j Tc ) 0 I t 2 T (2.2)
j = o
where C, is the spreading code (signature sequence) of the user
k,
96) is a normalized rectangular chip function with duration T, , and N is the procession gain, T = i?Tc.
Each user's signal is transmitted through an individual frequency- selective fading channel embedded in AWGN, which is modeled as Tapped-Delay-Line form [4]. This channel model is composed of random coefficients and independent to each other. Assumed that all users are received coherently, then the received signal of the kth user is:yk (t)=
4
~ ~ ~ b k ( i ~ , ~ ~-z,) ~ ( t ~(2.3) ~ - ~ - i ~ - j ~where
FV
is the bandwidth of the transmitted signals =l/Tc,z k is the transmission delay, L, = LT&w]+ 1 is the number of channel taps, and
Th
denotes the delay spread of the user k's channel. The time-variant dh(t) is the nth tap coefficient of the user k's channel at time t, which is a complex-valued stochastic process. L, is the number of resolvable paths, which could be set as a constant maximum valueL
for all user's channels. dkn(t) remains constant during a symbolperiod. The channels are assumed to suffer from Raylaigh Fading effect that dh(t) is a complex Gaussian random
process. It is reasonable to assume dh(t) constant during a
i=-wnS) j=O
symbol period, especially when the data rate is high. Therefore, the fmal received signal is:
k=J n=Oj=Oi=-ao
where n(t) is a complex-valued AWGN with zero mean and
power spectrum density No
.
z = 0 for synchronous CDMA.111.
RECEIVER STRUCTURE
For a signal with bandwidth
W,
the resolution of its multiple paths is approximately equal to 1/W. To equalize the unknown composite channel, we use a chip matched filter and then sample the output at chip rate, j &6)lt.
The output samples construct sufficient statistics. The sampled signal after the Ith symbol, mthchip time is:
T C 0 K M-1 rm (I)= b k (1 - - i ) l l h (I;i)+ V m ( I ) , (3.1) &=I i=O N-1 L-l
h h ( t i ) . . ~ ~ c k ( j p & i ) f
q++(iN+rn-j-n)T,lf$(tpt
j - 0 t i 4where vm(Z) is from the background noise, and
M
= [(L
-
1)/N1+ 1.
The output samples during each symbol period are collected as a processing vector form:r(O= [ Y g ( I ) i ( o - * - ~ N - , ( o r * (3.2)
=
KZ,M-l)l(Z,M)*
*-h(l,O)~p(Z-M+1(1
-M+2)..
.p(Z)T
+*z)
Not knowing the channel parameters, to equalize the overall channel for extracting the Ith data symbol of the user k, we stack the successive P output vectors since the desired signal responds on the Zth, (Z+l)th, (Z+P-1)th symbol periods, where
from r(Z). The processing delay is at least MT. The depth of
stacking is a tradeoff between the performance and complexity, and here we just adopt the basic complexity for P=M. It follows:
P = ~ ( L - ~ ) / N ~ + I = M . w e f o m OUT processing vector R ~ ( z )
RM (I)= YM(~)+ VM(Z)= H d O B d O +
VM(O
rHl, M - IMZ, M-2).
.
.HZ,O)o
. . .
(3.3)
where HY(I), RY(Z), and BM(I) are M N x K ( M + L - l ) ,
M N x 1 and
K(M
+
L-
1)" 1 matrixes respectively.Fig. 1 shows the general structure of the receivers. For the user
k's Zth symbol detection, the adaptive filter shown in Fig. 2 with
N
branches and M stages is denoted as a vector w k ( I ) , M N x l .There are
N
branches at the output of the serial-to-parallel device and each branch corresponds to a spreading code position. The finial decision is made as:In the following, we derive two forms of the linear complexity receivers and evaluate their performance in non-stationary channels.
A.
Linear
MMSE
Receiver
A typical approach is to use Minimum Mean Squared Error
(MSE) criterion, MSE ~ ( i ) E E [
kk
0)-
ik
(J)?
1.
J(Z) and itsminimum value are variant with I in non-stationary channels. TO minimize J ( I ) with respect to w k ( ~ ) , by the orthogonal
principle,
The optimum coefficients of the filter for user
k
are time varying due to the stochastic non-stationary characteristics of the composite channel. In case the channel is time varying but stochastically stationary or even fixed, with the stationary data symbols and the cyclic stationary spreading codes, R M ( I ) is statistically stationary and then the index I of (3.5) disappears as in a traditional Wiener-Hoff equation, i.e.If the composite channel is non-stationary, we should solve
(3.5) to derive the optimum solution of the Zth period, assumed that we could know the relationship between the ensemble average E R,(I)R:(Z).Wt(Z]
I
and the optimum W k @ ) and the cross-correlation E RM (I)$(Z).
Unfortunately, it is difficult to separate Wk(Z) from the ensemble average term unless we constraint the filer coefficients to be fured values (i.e. uncorrelatedwith
R M @ ) R E ( I ) ) for simplicity.However, for wideband CDMA systems, it easily achieves a "locally stationary" condition. There are M+G1 symbols of
each user involved in the processing vector
R Y
(I),
so if the channel is stationary at least for M+L-1 symbol periods, an fixed optimum solution exits for each processing vector basedon its local statistics. If the processing vector is locally stationary,
[
I
The auto-correlation %(I) and cross-correlation '3
(I)
are random, and thus W, (Z) is a random process. But with certain specificZ,
it is fixed given the statistics of the processing vector. Hence, within a locally stationary period, the receiver should search an optimum solution for that period and then to track the optimum solutions over successive periods.To derive the theoretically achievable MMSE, denote the optimum error between the desired symbol and the optimum estimate as
c(z),
and the optimum coefficient as w k ( z ) .bk (I)= z ( ’ ) + w k (IPA4
(I)
(3.8)Taking mean squared operation, under the locally stationary condition, J,~,
(I)=
U: (l)- w k (~)it~(l)SirkH(I)
= 0;
(z)-
‘%?
(l)(‘%(l)-’)”
‘% k (1) (3.9)From (3.9), it shows that the achievable MMSE depends on the statistical characteristics of %(z) and %k(Z) for each locally
stationary period.
-%m
-
[ % y o
] X - 0I,,,-,
1
I %(r) 0 % f ( Z - M + 1 ) ; = - % F ( I - M + l )B. Decision Feedback Equalization Receiver
-
wr”
(1)WbH (1)
(3.12)
‘ % k ( l ) and %(Z) are known, we can derive the optimum
D E
coefficients from (3.13). We make use of Kalman filtering and simpler algorithms as LMS and RLS to adaptively track the optimum solutions over successive stationary periods.
C. Kalman Filtering
By assuming a non-linear state transition for optimum solutions and by Taylor expansion of the non-linear function, Extended Kalman filter [2] is adopted. Consider the coefficient vector w k
(z)
as the state of the receiver of theuser k for Zth symbol and then assume the state varies as the following model:
w k (Z
+
I)= F (I; w k (Z))+ VI(I)
(3.14)F (I; w k (Z)) denotes the transition matrix function which is a
functional of the discrete time index 1 and the present state
W k ( j ) , and
v,(z)
is a zero-mean white noise vector with correlation matrix Ql(Z). The measurement equation is modeled as:bk (I)= wk (I)+ vZ (3.15)
V2(Z) is a zero-mean white noise process with correlation function Q2 (1) and uncorrelated with Vl
(I).
To make use of the standardKalman
filtering algorithm, linearize the nonlinear functional with respect to Wk(Z) around the optimum filtering Coefficients W k ( 1 ) by Taylor expansion.where F ‘ (I; w k (Z))
=
dF(’;
wk(‘))
and O(2) denotes those mk(I)
terms with order higher than one dropped for linearization. Take (3.16) into (3.14), we get the follows:
w k
(I
+
I)= F ’(I;
w k(z)>w,
(I)+
D(Z)+ V1 (Z) (3.17) entries in D(Z) are known at time 1. With (3.15), as long as F(I;w~(z)),
Q,(I)
andQ&)
are known, the recursive iterations for deriving the MMSE solution proceed as follows: For 1=1,2,3...
K(1,O) = E [ ( W k (1)- E [ W k ( 1 ) D ( w k ( 1 ) - E [ W k (1)DI
G ( 0 = K (I,! - 1)R M
(I)b
5
( O K ([,I - 1 ) R ( U + Q~(01’
where F w k (I))- F ’
(z;
w k (z))3Lk(I)
and all theFind F (E;
wk
(I)), Q , (1) andQ2
(1) from the channel model and the relationship of two consecutive MMSE solutions, and apply them for each concerned environment.D.
Adaptive Implemention
The adaptive algorithm used in non-stationary environments needs both good convergence and tracking property. For our several proposed linear receivers, we use the two most widely adopted adaptive algorithms to implement them, the LMS and RLS algorithms. L M S is known for its simple complexity and its robustness due to model independence. RLS could be view as a special case of Kalman filter [ 5 ] , which is known for its tracking ability.
Least Mean Square Algorithm
No matter the channel is stationary or not, use the instantaneous estimates to replace the ensemble expectations:
w k (l -I- l)= w k
@)+
&k(lk
b”,
(3.19) A helpll working rule for choosing r(l follows [2]. The currentdecision &(l) at the output of the receiver is used to replace
bk(l) in (3.19) for decision directed mode. Note: The notation, R, (I), in (3.19) is replaced by R, (I) for DFE.
(I)
Recursive Least Square Algorithm
The optimum solution in (3.5) and (3.1 1) involve the estimation of ensemble averages. Minimize the time-average weighted squared error by bast-Squared method [2] in place of the ensemble expectations to derive the optimum solution. The cost function is:
J”Q)=
2 A i - lbk
(I)-&(IF
(3.20) d is the forgetting factor, which is a positive constant close to 1. Getting rid of the ensemble averages, the algorithm is used with for stationary and non-stationary cases. By matrix inversion lemma, the RLS algorithm is as follows: Forl =1,2.--K (I)= ( a - * p ( j - 1)R @))/(I
+
A - ’ R Q>(I-
1)R (I) 5 (I)= b k (I)- w k (I - 1 ) R M (I)W
A“
(I)= W (I - 1)+ K (I)r’(I)i=O
{ ( I ) = b k ( I ) - W k ( I - l & M (I)
( 3 . 2 1 )
PO)= n-‘P(I-I)-a-‘K(I)R~P(I-l)
;k (r)= k
(rt
M (I)W B
(o)=
[o],
p(o)= 6-11,6 is a positive small value. The current decision i k ( 1 ) at the output of the receiver is used to replace bk(l) in (3.21) in decision directed mode.IV.
NUMERICAL SIMULATION
In this section, we present the simulation results of the proposed LMMSE receiver, and DFE receiver with both LMS and RLS Algorithm. There are K=5 users in the processing gain N=16 CDMA system. 16-length Hadamard Walsh codes are used for our simulation. Independent equally probable binary { 1, -1} sequences are generated for all users as the data symbols. We assume =1 for all k. For the simulated fading characteristics of the channels, each channel is generated separately by referring the impulse response model of [9]. Assumed the carrier fkequency is 2GHz, the transmitted
bandwidth is 1.25MHz and the relative moving velocity between the transmitter and receiver is 6Okm5r. Thus, the maximum Doppler frequency is 11 1.11
Hz.
We use the first order AR (Gaussian Markov) model to simulate the variation of each tap coefficient d ,0).
Assume that the tap coefficients are invariant during a symbol period, and(5.1) where vd (I) is a zero mean complex Gaussian driving noise. p ~0.999 is a good approximation around several thousands symbol periods. The number of resolvable paths
L
= 26, and the number of the stacked processing vectorsM
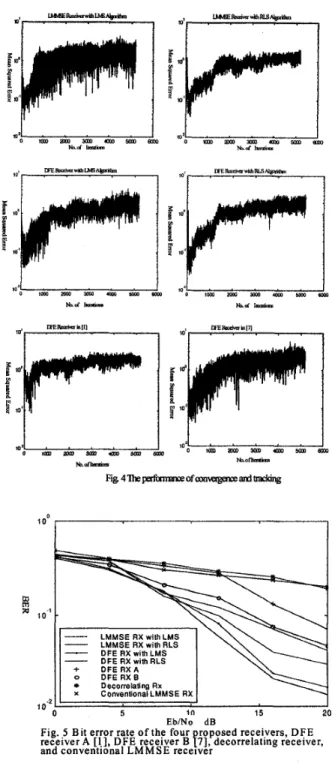
= 3. Fig.4 shows the convergence and tracking performance of all adaptive receivers over 100 independent runs at Eb/No =20dB and initially the training sequence with 100 data symbols was used. E, denotes the transmitted symbol energy. We observed successfbl tracking to thousand decision-directed operations.
We simulated the BER of each proposed adaptive receiver with respective to different S N R for 1200 data symbols where the front 100 symbols are used in training mode. The conventional LMMSE receiver, decorrelating receiver [3] and
the adaptive DFE receivers in [ 11 and [7] are simulated, shown in Fig. 5. From Fig. 5 and Fig. 6, the DFE receiver with RLS adaptive algorithm performs best. The behaviors of these receivers are affected mostly by interference but noise. d h (l+1)= pdkn (I)+Vd (l)
V.
CONCLUSION
Based on the approach of equalization, we proposed multi- user receiver structures of linear-complexity for wideband
CDMA in time-varying frequency-selective fading channels in this paper and demonstrated their superior performance.
REFERENCES
(1) Majeed Abdulrahman, etc., “Decision Feedback Equalization for CDMA in Indoor Wireless Communications,” IEEE JSACVol. 12, No. 4, pp.698-706, May 1994.
(2) Simon Haykin, “Adaptive Filter Z%eory,” Third Edition, Prentice Hall, 1996.
(3) R. Lupas and S . Verdu, “Linear Multiuser Detectors for
synchronous code-division multiple-access channels,” IEEE
Trans. Comm., Vol. 35, pp. 123-136, Jan. 1989.
(4) John G. Proakis, “Digital Communications, ” third edition,
MCGraw Hill, 1995.
(5) A. H. Sayed, and T. Kailath, “A State-space Approach to Adaptive RLS Filtering,” IEEE Signal Processing Mag., Vol. 1 1, pp. 18-60, 1994.
(6) X. Wang, and H.V. Poor, “Blind Equalization and Multiuser Detection in Dispersive CDMA Channels”, IEEE Trans. On
Comm.,
Vol. 46, No. 1, pp. 91-103, Jan. 1998.(7) Zhenhua Xie, etc. “A Family of Suboptimum Detectors for Coherent Multiuser Communications,” IEEE JSAC, Vol. 8, pp. 683-690, May 1990.
(8) 2. Zvonar and D. Brady, “Suboptimum Multimuser Detector for Synchronous CDMA Frequency-Selective Rayleigh Fading Channels,” Proceedings of Globe-corn, pp. 82-85, 1992.
(9) UMTS 30.03 version 3.2.0, TR 101 112 V3.2.0 (1998-04) & Serial TO Parellel I Adaptive Equalizing Filter
Fig. 1. The structure of the linear equalized receiver
--
A Igo rithm
F i g . 2 . T h e structure of t h e kth branch in A d a p t i v e E q u a l i z i n g Filter d e v i c e
__cc Feed Forward Filter Make Decision i ’ 0 ) \ / 1 O0
I
10.l 10’; * Decorrelating Rx x Conventional LMMSE RX + D F E R X A 0 D F E R X B * Decorrelating Rx x Conventional LMMSE RX I I 5 i n 15 Eb/No dBFig. 5 Bit error rate of the four roposed receivers DFE receiver A [I,], DFE receiver B f7], decorrelating rkceiver, and conventional LMMSE receiver
3
Acknowledgement: This research was supported by the National Science Council, Taiwan, R.O.C., under the contract NSC-88-22 19-E-002-002.