行政院國家科學委員會補助專題研究計畫成果報告
※※※※※※※※※※※※※※※※※※※※※※※※※
※ 平行化基因演算法應用於仿生型自主式水下載具 ※
※ 幾何外型設計與行動規劃最佳化之研究 (II) ※
※※※※※※※※※※※※※※※※※※※※※※※※※
計畫類別:□個別型計畫 ■整合型計畫
計畫編號:NSC 89-2611-E-002-041
執行期間:89 年 08 月 01 日至 90 年 07 月 31 日
計畫主持人:郭真祥
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:國立台灣大學造船及海洋工程學系
中 華 民 國 90 年 07 月 31 日
行政院國家科學委員會專題研究計畫成果報告
平行化基因演算法應用於仿生型自主式水下載具
幾何外型設計與行動規劃最佳化之研究 (II)
Rapid and Global Optimization for the Biomimetic AUV
Geometr ic Design and Action planning Using Par allel Genetic
Algor ithms (II)
計畫編號:NSC 89-2611-E-002-017
執行期限:89 年 08 月 01 日至 90 年 07 月 31 日
主持人:郭真祥
國立台灣大學造船及海洋工程學系
計畫參與人員:孫志彬 國立台灣大學造船及海洋工程學系
計畫參與人員:陳彥均 國立台灣大學造船及海洋工程學系
一、中文摘要 本計畫之主要目的在於發展一套具平行計算 能力之基因演算法(Genetic Algorithms), 其中考 慮可以處理具拘束條件(with constraints)之非線性 系統中全域最佳化設計問題。並將所發展之平行化 基因演算法應用於仿生型自主式水下載具幾何外 型設計與行動規劃最佳化之研究。本計畫擬改進基 因演算法中所採用演化技術,以及引進平行計算處 理環境來分散求解適應值(fitness)計算量,針對 基因演算法應用於複雜問題之求解效率加以改 進,以提昇本方法運用在實際工程問題最佳化設計 之可行性。 關鍵詞:仿生型自主式水下載具,幾何最佳化設 計,平行化基因演算法,即時系統,虛擬實境 Abstr actIn the last year, two items of the project are carried out: The one is the construction of the geometrical modeling of the BAUV, while the other is the completion of computer programs of GA and the improvement and discussion of it’s searching mechanism.
Keywor ds: Biomimetic AUV, Geometric Optimal
Design, Parallel Genetic Algorithms, Real-time System, Virtual Reality
動性能,首先必須建構出最佳的操控系統。在水中 進行運動是魚類的天賦本能,了解魚類運動時身體 以及鰭的姿勢變化,有助於設計出仿生型自主式水 下載具的最佳操控系統,因此魚類在水中的運動模 式是重要的研究課題。 近年來,由於電腦的繪圖速度不斷增進,虛擬 實境廣範的運用於各研究領域。利用虛擬實境可以 將魚的運動過程完整呈現出來,如此將有助於了解 魚類如何利用身體以及鰭的姿勢變化,來進行牠所 需要的運動。並且可以藉由虛擬實境觀察各種運動 狀態下,魚類身體各部份之間的互動關係,協助我 們了解仿生型自主式水下載具各部份所需要的互 動關係,進而建構出一套穩定且高效率的運動模 式。 此外,仿生型自主式水下載具依據現有的操控 系統,在水中的運動軌跡與姿勢,也可以利用虛擬 實境呈現在電腦上,例如仿生型自主式水下載具面 對障礙物的迴避過程等。根據虛擬實境所呈現的結 果,可以協助我們找出現有操控系統中所存在的缺 失,對於仿生型自主式水下載具操控系統的改善有 所助益。此為本計畫進行動畫模擬及虛擬實境研究 目的之一。 本研究是一個為期三年的整合性研究計劃,接 續前一年的研究成果,今年(第二年)的研究目標 分別有: 1. 研究並建立平行化研究環境 2. 研究並建立平行化基因演算法 3. 研究並建立具拘束條件之非線性最佳化程式 4. 結合其他子計劃之流力計算程式,進行幾何外型
象,並且根據實際錦鯉的外型量測資料,利用 CAD 軟體(Rhinoceros)建立其立體模型(圖 1-1),並 且從著色後的結果(圖 1-2),確認所建立曲面之 平滑度。今年之中,本研究從真實錦鯉的照片中取 得錦鯉的表面材質,並利用貼圖技術,將此材質貼 附在所建立的立體錦鯉模型之上(圖 3 至圖 1-5),以增加其真實性。 圖 1-1 錦鯉幾何外型 圖 1-2 錦鯉外型著色後結果 圖 1-3 貼圖後之錦鯉立體模型 圖 1-4 貼圖後之錦鯉立體模型 圖 1-5 貼圖後之錦鯉立體模型 2. 錦鯉之運動 在第一年中,本研究利用錦鯉的脊柱做為基準 線,在錦鯉游動時,根據脊柱的變形狀況,帶動整 條錦鯉身體與尾鰭各剖面的變形(圖 1-6)。今年 本研究更進一步,將此方法整合在前一節所建立的 錦鯉模型之上,圖 1-7 至圖 1-10 便是錦鯉模型游動 時,從各角度著色(render)所得的結果。 圖 1-6 錦鯉脊柱與各剖面之變形
圖 1-7 錦鯉運動狀態圖 圖 1-8 錦鯉運動狀態圖 圖 1-9 錦鯉運動狀態圖 四、遺傳演算法求解具拘束條件之最佳化問題 工程最佳化問題中往往存在著設計上所需之 拘束條件(constraints),運用基因演算法求解這類 最佳化問題時,經常使用懲罰函數方法(penalty function method)來處理拘束條件,其主要原因在 於懲罰函數方法容易導入問題的目標函數中。懲罰 函數方法需要對違反限制條件的方程式導入懲罰 函數參數 (penalty parameter),此方法的困難處在於 使用者往往需要進行數值試驗來決定懲罰函數參 數值的大小,而參數值的大小會影響到適應函數的 計算結果。為了改善這個問題,本研究發展一套以 基因演算法為基礎,結合改良式懲罰函數方法來處 理最佳化問題中的拘束條件,研究目標在於建立具 求解非線性問題最佳化之理論模型,其特點在於不 需要懲罰函數參數。在理論方面,我們運用基因演 算法作為最佳化計算核心,結合懲罰函數方法來處 理拘束條件,包含線性、非線性與等式、不等式拘 束條件。 1. 求解拘束條件最佳化問題相關研究 運用基因演算法求解具拘束條件最佳化問題 上,可依處理拘束條件之不同策略分為以下五種: 1.懲罰函數方法 [6][7];2.針對不合理解之處理方 法 (Rejection of infeasible solutions); 3.採用編碼與 基因運算元來維持解的合理性 (Maintain feasible solutions by specific representation and genetic operators); 4.編碼方法 (Based on decoders); 5.混合 式方法(Hybrid method)。 在上述方法中,懲罰函數方法在定義適應函數方面 具有容易實行的特性,而且不針對問題的型態作假 設,可以用來處理非線性最佳化問題,所以懲罰函 數方法已廣泛地運用在各式最佳化問題上。本研究 以懲罰函數方法為基礎,進一步發展一套不需懲罰 函數參數的方法。 2. 拘束條件最佳化理論 考慮一個具拘束條件之最佳化問題,其問題之 數學模型如下式所示:
Minimize
f
(
x
ρ
)
Subject to
g
j(
x
ρ
)
≥
0
,
j
=
1
,...,
J
K
k
x
h
(
ρ
)
=
0
,
=
1
,...,
(1)束條件,函數hk
(
x
)
ρ
為第k個等式拘束條件。 針對上述最佳化問題,我們發展一套以基因演算法 為基礎,結合改良式懲罰函數方法來處理問題中的 拘束條件。本研究所提出之方法結合判斷解的合理 性法則與競賽選擇 (Tournament selection)方法,藉 此建構出適應函數 (fitness function),可以將具拒束 條件問題轉換為不具拒束條件問題,之後運用基因 演算法進行最佳化計算。 上述最佳化問題的適應函數可依下式定義: + = ≥ =∑
= m j j j otherwise x g f m j for x g if x f x F 1 max ( ) ,..., 2 , 1 0 ) ( ) ( ) ( ρ ρ ρ ρ (2) 其 中F
(
x
ρ
)
為 基 因 演 算 法 中 所 需 的 適 應 函 數 ,)
(
x
f
ρ
為原問題之目標函數。運算元 < gj(
x
)
ρ
> 代 表gj(
x
)
ρ
的絕對值,當gj(
x
)
ρ
小於零時,其< gj(
x
)
ρ
> 值設為零。 在方程式(2)當中,藉由判斷解的合理性與否,進而 定義出問題的適應函數,有以下兩種情況: 情況一:問題的解x
ρ
滿足所有 m 個限制條 件,則適應函數就以原問題之目標函數定義。 情形二:問題的解x
ρ
違反限制條件,則適應 函數是以fmax值加上違反限制條件值的總和來 定義。其中 fmax值代表目前演化代數 (current generation) 中合理解之最大目標函數值。 由方程式(2)的適應函數之定義得知,本研究所發展 的處理方法不需要懲罰函數參數的引入,能夠廣泛 地應用於各類最佳化問題上,不需針對限制條件決 定其懲罰函數參數。此特點比起傳統的懲罰函數方 法,在使用上有著相當不錯的方便性。 方程式(1)中的等式拘束條件,一般經由下式轉換至 不等拘束條件:0
)
(
)
(
≡
−
≥
+x
h
x
g
k Jρ
δ
kρ
k
=
1
,...,
K
(3)
(3)
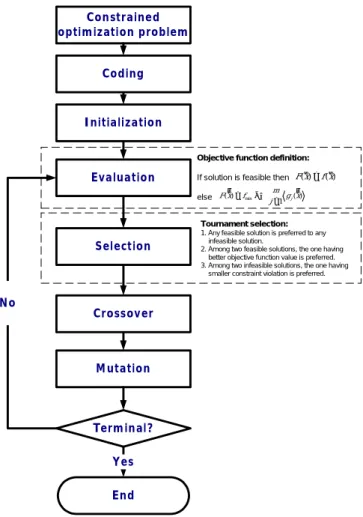
其中 δ 為一個很小的正值。 本方法中,運用競賽選擇方法,運用以下三種規則 中可以判斷出解的優劣,而其中較好的解會被篩選 出來,進而複製至新的子代中。 規則 1:在兩個解的比較中,合理的解比不合理 的解好,會被選入新的子代中。 規則 2:兩個解均是合理解時,目標函數值較大 的解會被選入新的子代中。 規則 3:兩個解均是不合理解時,懲罰函數值較 小的解會被選入新的子代中。 綜合以上論述,將本研究所提出的最佳化程序顯示 於圖 1-11。Objective function definition:
If solution is feasible then else Constrained optimization problem Coding Initialization Evaluation Selection Crossover M utation Terminal? Yes No End ∑ = − = () 1 ) ( min g x j m f x F j ρ ρ ) ( ) (x fx Fρ = ρ Tournament selection:
1. Any feasible solution is preferred to any infeasible solution.
2. Among two feasible solutions, the one having better objective function value is preferred. 3. Among two infeasible solutions, the one having smaller constraint violation is preferred.
圖 1-11:具拘束條件問題的最佳化程序 3. 計算結果與討論 運用本研究所提出之方法來求解一個具有兩個 變數的最佳化問題,問題的數學模型如下式所示: Minimize
(
)
(
12 211
)
2(
1 27
)
2 2−
+
+
−
+
=
x
x
x
x
x
f
ρ
Subject to the nonlinear constraints:
6 , 0 0 84 . 4 ) 5 . 2 ( ) ( 0 ) 5 . 2 ( ) 05 . 0 ( 84 . 4 ) ( 2 1 2 2 2 1 2 2 2 2 1 1 ≤ ≤ ≥ − − + = ≥ − − − − = x x x x x g x x x g ρ ρ
(4)
將上式目標函數圖形與限制條件之區域繪於圖 1-12。 圖 1-12:目標函數與限制條件圖 上圖中,細長的彎月區域滿足本問題的限制條件, 此合理解的區域僅佔整個求解區域約 0.7%,而且 其為一個凹型區域,這樣的求解區域形式對於傳統 的求解方法是一個很大的挑戰。 以下將基因演算法的使用參數、解的編碼形式與求 解空間整理於表一與表二。 表一:基因演算法之參數 參數說明 參數值 Population size 50 Number of generation 100 Crossover probability 0.6 Mutation probability 0.02
Type of selection Tournament selection
Type of crossover Uniform crossover
Scaling Linear scaling
表二:解的編碼與求解範圍 變數 求解範圍 編碼長度 解析度 當解滿足限制條件時: 2 2 1 2 2 2 1 11) ( 7) ( ) ( ) ( 2 − + + − + = = f x x x x x x F ρ ρ 當解違反限制條件時: > − − − < + > − − − − < + = 1 84 . 4 / ) 5 . 2 ( 84 . 4 / 84 . 4 / ) 5 . 2 ( 84 . 4 / ) 05 . 0 ( 1 ) ( 2 2 2 1 2 2 2 1 max x x x x f x F ρ 依照上述適應函數的定義,我們運用基因演算法進 行最佳化計算。最佳化的收斂結果如下圖 1-13 所 示,實線表示每一演化代數(generation)中最佳的 解,虛線表示族群(population)中所有解的平均值, 結果顯示本方法有相當穩定與不錯的最佳化結 果,族群中的所有解均朝向滿足限制條件的求解區 域前進。 0 20 40 60 80 100 Generation 0 20 40 60 80 100 F it n e s s
Nonlinear Function Optimization Using Efficient Constraint Handling Method
Fitness Best Fitness Avg. 圖 1-13:最佳化收斂情形 表三將本研究所得之結果與文獻[8]運用傳統懲罰 函數方法所得之結果作一比較,結果顯示本研究能 夠找到較接近最佳解的值,也較符合問題的限制條 件。 表三:本研究之方法與文獻[8]所得結果之比較 本研究結果 文獻[8]結果
x
1 2.247 2.246x
2 2.378 2.382f(x
1,x
2)
13.5135 13.6160g1(x
1,x
2)
0.0281 0.0315g2(x
1,x
2)
0.2239 0.2184制條件區域內而且適應函數的值為最小值。此結果 顯示,本方法在導引最佳化過程朝向滿足限制條件 的問題上具有優越能力。 圖 1-14:初始世代、第十代與第一百代中,解的分 佈結果 五、計畫成果自評 我們已經成功地發展一套以基因演算法為基 礎,結合改良式懲罰函數方法來處理最佳化問題中 的拘束條件。本研究所提出之方法結合判斷解的合 理性法則與競賽選擇方法,藉此建構出適應函數之 數學式,可以將具拒束條件問題轉換為不具拒束條 件問題,而且不需要懲罰函數參數。由測試問題的 結果顯示,本方法較傳統的懲罰函數方法能夠得到 較好的結果,而且能有效的導引最佳化過程朝向滿 足限制條件的區域前進。 六、參考文獻
[1] Goldberg, D. E., ”Genetic Algorithms in Search, Optimization and Machine Learning”.
[2] Addison-Wesley, Reading MA, K. & Goldberg, D.E., “An Investigation of Niche and Species Formation in Genetic Function Optimization”, Proceeding of the Third Inter. Conference on Genetic Algorithms, pp. 42-50, 1989.
[3] Goldberg, D.E., and Richardson. J., “Genetic Algorithms with Sharing for Multi-Model Function Optimization”, Genetic Algorithms and Their Applications: Proceedings of the Second International Conference on Genetic Algorithms, pp.41-49, 1987.
[4] Krishnakumar, K., “Micro-Genetic Algorithm for Stationary and Non-Stationary Function Optimization ”, Intelligent Control and Adaptive System, Vol. 1196, 1989.
[5] David L. Carroll, “Chemical Laser Modeling with Genetic Algorithms”, AIAA Journal, Vol.34, No.2, pp.338-346, 1996.
[6] J.T. Richardson, M.R. Palmer, G. Liepins, M. Hilliard, “Some guidelines for genetic algorithms with penalty functions”, Proceedings of the Third Confer. on Genetic algorithms, pp 191-197, 1989.
[7] K. Deb, “An efficient constraint handling method for genetic algorithms”, Computer methods in applied mechanics and engineering, Vol.186, pp 311-338, 2000.
[8] D. Powell, M.M. Skolnick, “Using genetic algorithms in engineering design optimization with nonlinear constraints”, Proceedings of the Fifth International Conference on Genetic algorithms, pp 424-430, 1993.