A Robust Evolutionary Algorithm for Optical Thin-Film Designs
Jinn-Moon Yang Department of Computer Science
and Information Engineering, National Taiwan University,
Taipei, Taiwan moon @csie.ntu.edu.tw
Abstract-
This paper presents an evolutionary approach, called Family Competition Evolutionary Algorithm (FCEA), for
optical thin-film designs. The proposed approach, based on family competition and multiple adaptive rules, inte- grates decreasing-based Gaussian mutation and two self- adaptive mutations to balance the exploitation and explo- ration. It is implemented and applied to two coating sys- tems. Numerical results indicate that the proposed ap- proach is very robust for optical coatings.
1
Introduction
The optical thin-film coating is technologically very impor- tant to modem optics. It can be broadly described as fol- lows [20], [lo]: any device or material is deliberately used to change the spectral intensity distribution or the state of po- larization of the electromagnetic radiation incident on it in or- der to satisfy performance specification and some constraints. Optical thin-film coatings have numerous remarkable appli- cations in many branches of science and technology, such a5
scientific instrument manufacturing, spectroscope, medicine, and astronomy. They also have used in architecture, the au- tomotive industry, energy conversion, computer and display devices, and communication [ 1 11.
Many approaches have been proposed to design optical thin-film coating systems. They can be divided roughly into three categories [ 103, [20]: analytical, graphical, and numer- ical methods. The numerical methods are particularly pow- erful because they can be applied to the design of coatings with much more complicated properties than the other meth- ods.The problem of an optical coating design can be formu- lated as an optimization problem based on the use of merit functions [9]. Generally, this optimization problem is ex- tremely difficult because of the large number of local mini- mum in the merit function.
Refinement methods [ 11, [ 121 and synthesis methods [SI, [19], [26] are two widely used numerical methods for optical thin-film designs. Refinement methods, such as damped least square, modified gradient, golden section, Hook and Jeeves
search,
and simplex method, normally requirea starting
de- sign that is closed to the desired performance [ l], [ 121. And then a desired solution is achieved by gradually modifying from the staring design. The solution quality of refinementCheng-Yen Kao Department of Computer Science
and Information Engineering, National Taiwan University,
Taipei, Taiwan [email protected]
methods heavily depends on and is sensitive to the start point. Unfortunately, good starting designs are not readily available for many modem design problems. At the same time, to choose a good starting design is time-consuming and difficult tasks in a complexity coating system.
Contrary to refinement methods, synthesis methods [ 191 such as gradient evolution, flip-flop method, inverse Fourier transform [7], and simulated annealing [27] generate their own starting designs automatically. They are usually com- bine with numerical refinement methods due to their solution quality is often not enough well. Some of synthesis and re- finement methods require the determination of first and sec- ond derivation of the merit function. Therefore, to develop a good synthesis method is an important research topic.
More recently, evolutionary algorithms [ 151, [22], [ 181, [29] have been applied to optical thin-film designs. Evo- lutionary algorithms [17], [4], [16] represent an emerging class of algorithms which are able to provide optimal or near- optimal solutions to a wide range of challenging problems. Their basic ideas are borrowed from genetics and natural se- lection. They are a generally adaptable concept for prob- lem solving , especially well suited for solving difficult op- timization problems where traditional optimization methods are less efficient. Evolutionary algorithms have been success- fully applied to many problems encountered in optical filters and coatings which are inherently computational complexity. These articles demonstrated that evolutionary algorithms are robust and obtain competitive results with others synthesis methods. There are about three main independently devel- oped but strongly related implementations of evolutionary al- gorithms: genetic algorithms [17], evolution strategies [4], and evolutionary programming [ 161.
A bit-string genetic algorithm [ 151 used a simple and fixed five-layer structure to design a silver-based heat system. An evolution strategy [18] was applied to design a filter used in colorimetry. In [21], [22] authors combined a gradient method into a real-coded genetic algorithm for synthesiz- ing three complex inhomogenous problems. Their results are very competitive with the ones obtained by non-evolutionary approaches. A mixed-integer evolution strategies technique used self-adaptive mutations to solve the homogeneous coat- ing problems [5], [23]. All of these evolutionary algorithms optimize a synthesis system with a fixed number of layers.
lutionary algorithm (FCEA) [31], [30] to synthesize multi- layer thin-film systems with various number of layers. FCEA combines decreasing-based Gaussian mutation, self-adaptive Gaussian mutation, and self-adaptive Cauchy mutation. It in-
corporates family competition and adaptive rules to construct the relationship between mutations whose performance heav- ily depends on the same factor, called step size. FCEA inte- grates self-adaptive mutations, adapting the step sizes with a stochastic mechanism, with decreasing-based mutations, de- creasing the step sizes with fixed rate y where y
<
l, by using the family competition and adaptive rules to balance the ex- ploration and exploitation. The family competition is derived from (1+
A)-ES [4] and acts as a local search procedure.The rest of this paper is organized as follows. Section 2 describes the optical thin-film coating problems. Section 3 introduces the evolutionary nature of FCEA. In Section 4 two coating designs are presented to illustrate performance of our proposed approach. We also compare FCEA with various approaches on these problems. Concluding commentS are drawn in Section 5.
2 Problem Definition
The problem in numerical design of optical multilayer coat- ings is to find the construction parameters of systems which satisfy the desired optical specification. The construction pa- rameters includes the number of layers ( M ) , the thickness (4, refractive indices (q), and extinction coefficients (k) of the medium, substrate, and layers. In general. synthesis methods are to find thickness (dl ,
. . .
, ~ M M ) and indices (qt,. . .
, q ~ ) of M layers. Fig. l(a) shows a thin-film system consisting ofM layers.
Before you design a multilayer coating system, it is neces- sary to define the requirements. Mos: often this is defined by specifying the target transmittance T or target reflectance R at a number of wavelengths in the interesting spectral region. If the materials in a multilayer coating system are all nonab- sorbing, then 5? = 1
-
R. The purpose of designing a thin- film system is to find the number of layers M, the refractive indices qj, and the thickness dj of the j t h layer, in order to match closely the specified performance where 15
j5
M. A coating system is called normal-incidence coating if the incident angle 80 shown in Fig. l(a) is zero, otherwise it is called oblique-incidence coating.Let the spectral reflectance of the M-layer system shown in Fig. l(a) be denotedas R(q, d, A) where A is the interesting wavelength region. The desired spectral reflectance profiles are fitted by minimizing a suitable merit function [20] which composes of an appropriate function of R(q, d, A) defined within the wavelength range of interesting region: [At, A,] where A1 and A, are low and upper bound wavelength of in-
teresting spectrum region. A widely working merit function can be defined in the following equation:
where @A) is the target reflectance. Fig. l(b) shows an ex- ample of a target reflection
(fi(A))
and a respective design reflection ( R ( Q , d, A)). In computer practice, this integral is approximated by a summation over a discrete number W ofwavelength value and can be represented as
The most general method of calculating R(q, d, Ak) is based on a matrix formulation which is useful especially when the number of optimizing parameters is large. According to the
matrix method, the reflectance R(q, d, A k ) of a multilayer system at wavelength A k is given by
(3) where qa is refractive index of incident medium. E k and H k ,
the electric and magnetic vector, respectively, are defined as
where 0, = 2 ( n j d j c o s O j ) . q, is the refractive index of sub-
strate medium. qj, d j , and B j are the refractive indices, thick-
ness, and angle of incidence of the j t h layer, respectively. To design an optical multilayer thin-film system should consider several practical limitations. First, according to the maximum principle [26], it is no advantage to use more than two materials that have the lowest qt and highest ~h refractive
indices at normal light incidence. In this case, the most gen- eral structure of multilayer system is ( ~ L q h ) ~ or (qhQt)'.
Second, the number of layers may be limited because the cost of coatings increases with the number of layers. In this paper, a layer be eliminated if its thickness is lower 0.001 pm. Fi- nal, the thickness cannot be negative and very thin layers are difficult controlled for some deposition processes. Therefore, the coating problem can be formulated as a constraint opti- mization problem. In this paper, we will use these properties to design the structures of coating systems.
3 Family Competition Evolutionary Algorithm
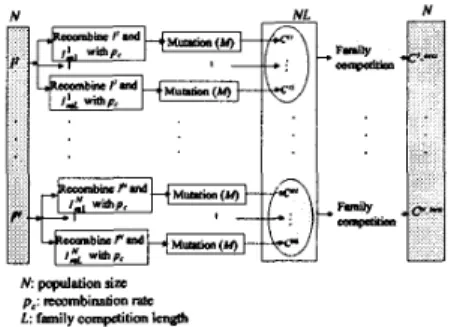
In this section, we present the detail of the family competi- tion evolutionary algorithm (FCEA) for the optical thin-film deign. Fig. 2 shows the basic structure of the FCEA. FCEA is a multi-operator approach which integrates decreaqing- based Gaussian mutation ( M d g ) , self-adaptive Cauchy muta- tion ( M & and self-adaptive Gaussian mutation(Ug).
Their performance heavily depends on the same factor step size that decides the perturbation size in one step of a mutation opera- tor.The basic steps of the FCEA are described as follows (Fig. 2): N solutions are randomly generated as the initial population. Then FCEA enters the main evolutionary loop, in which each generation consists of three nearly identical
...
2 772 d 2 I 0.9 0.8 0.7 0.6 ‘ci E 4 0.4 0 3 8 0.5::
1,.
, , ,,J-,
, , , , , , , , , , , , , , , , , , , , , , , , , 0 0.4 0.42 0.44 0.5 0.52 0.54 0.6 0.62 0.64 0.7 0.7’2 0.74 A / Wavelength L W m ) A,(a) The construction parameters of an optical multilayer system (b) F’rofiles of a target coating and a real construction Figure 1: The overview of a coating system
I I I
satisfy tCrminal
Figure 2: Overview of our algorithm: (a) FCEA (b) FCadaptive procedure
procedures. Each procedure is realized by doing recombina- tions, mutations, family competition, and selection. These three procedures mainly differ only in the mutations used: decreasing-based Gaussian mutation, self-adaptive Cauchy mutation, and self-adaptive Gaussian mutation. Hence we refer such
a
procedure as “FCadaptive” which will be de- scribed later in detail. Note that the input of an FCadaptive procedure is N solutions. Then the output is a new quasi- population with N solutions which will be the input of the next FC-adaptive procedure.The FCadaptive procedure (2(b)) employs three param- eters, namely, the parent population (P with N solutions), mutation operator (M), and family competition length (L), to generate a new quasi-population. The main procedures of FCadaptive are the family competition (Fig. 3) and the adap- tive rules. During the family competition procedure, each in-
Figure 3: The main steps of the family competition
dividual(I1) sequentially becomes the “family father.” With a probability p,, this “family father” and another solution ( I : )
randomly chosen from the rest of the parent population are used as parents to do a recombination operation. Then the new offspring or the “family father” (if the recombination is not conducted) is operated on by a mutation to generate a off- spring
(C”).
For each family father, such a procedure is re- peated L times. Finally L solutions (C”,. . .
,
CIL) are pro- duced but only the one (C1-best) with the best value of merit function survives. The merit function is defined as Eq. (2).Since we create L solutions from the same “family father” and perform a selection, this is a family competition strategy. We thought this was a good way to avoid the premature con- vergence but also to keep the spirit of local searches, because of these suspicions, and resule agree [3 11.
Two adaptive rules are implemented to adapt step sizes in FC-adaptive procedure with self-adaptive mutations. FCEA adjusts the step sizes while mutations are applied, however, such updates may be insufficient. According to dynamic evo- lutionary information, adaptive rules are designed to decrease the step sizes of self-adaptive mutation or to grow the step sizes of decreasing-based mutation in order to create the rela-
tionship of mutations after the family competition procedure. After the FC-adaptive procedure, there are N parents and N children left. Based on different stages, we employ vari- ous ways of obtaining a new quasi-population with N indi- viduals. In Cauchy self-adaptive mutation stage, each pair of father and its best child the one with a better objective value survives. This procedure is called “family selection.” On the other hand, “population selection” chooses the best N indi- viduals from all N parents and N children. With a probabil-
ity Pps, FCEA applies population selection to speed up the
convergence when the decreasing-based Gaussian mutation is used. For the probability (l-Pp8), family selection is still considered. In order to reduce the ill effects of greediness on this selection, the initial Pps is set to 0.05, but it is changed to 0.5 when the mean step size of self-adaptive Cauchy mu- tation is larger than that of decreasing-based Gaussian muta- tion. Hence, through the process of selection, the FCadaptive procedure forces each solution of the starting population to have one final offspring. Note that we create LN offspring in the procedure FCadaptive but the size of the new quasi- population remains the same as N .
Regarding chromosome representation, we present each solution of a population as (M, I, z, 0, v , $) where M is the number of layers of a coating system. The indicator I rep- resents the structure of the refractive indices because we use only one pair of materials with qt and qh. The refractive in- dex of first layer is when I is 0 and it is ~h when I is 1.
The vector z is the thickness vector of a coating system to be optimized; U , v , and $ are the step-size vectors of decreasing- based mutation, self-adaptive Gaussian mutation, and self- adaptive Cauchy mutation, respectively. In other words, each solution z is associated with some parameters for step-size control. The number of element of each vector, z, U , v, and $, is M. The initial value M is randomly chosen from [MI, Mh] where MI and Mh are the numbers of the low bound and up- per bound layers, respectively. Initially, I is randomly set to 1 or 0. The initial value of each entry of z is randomly chosen over a feasible region; 0 , v, and ?,LJ are set to 0.04,0.01, and 0.01.
In the rest of this section we explain each important com- ponent of the FCadaptive procedure: recombination opera- tors, mutation operations, and rules for adapting step sizes ( U , v, and ?,LJ). For easy description of the operators, we use a
=(Ma,
I”, z”, U ” , v”, $”) to represent the “fam- ily father” and b =(Adb,I*,
z b , U * , vb, +*) as another par- ent (only for the recombination operator). The offspring,c = ( M C , I“, z“, U “ , v“, @“), is generated by a genetic oper- ation. We also use the symbol zjd to denote the thickness of
j t h layer of a solution d, V j E (1,.
. .
,
M } .3.1 Recombination Operators
The advantages or disadvantages of a recombination for a par- ticular objective function can hardly be accessed in advance [3]. Therefore, we implement two simple recombination op- erators to generate offspring: modified discrete recombina-
tion and intermediate recombination [21. Here we would like to mention again that recombination operators are activated with only a probability p , . The optimizing solution (z) and a step size (a, U , or $) are recombined in a recombination operator.
Modified Discrete Recombination: The original discrete recombination [2] generates a child that inherits genes from two parents with equal probability. Here the two parents of the recombination operator are the “family father” and an- other solution randomly selected. Our experience indicates that FCEA can be more robust if the child inherits genes from the “family father” with a higher probability [3 11. Therefore, we modified the operator to be as follows:
( 5 )
For a “family father”, applying this operator in the family competition is viewed as a local search procedure because this operator is designed to preserve the relationship between a child and its “family father”.
Intermediate Recombination: We define intermediate recombination as:
za with probability 0.8
z; =
{
z i with probability 0.2.xj” = zj”
+
0.5(z!-
zj”), and (6)wj” = wj” +0.5(wj -?U;), (7) where w is U , 0, or $ based on the mutation operator applied in the family competition. For example, if self-adaptive Gaus- sian mutation is used in this FCadaptive procedure. 3: in (6)
and (7) is U . We follow the work of the evolution strategies community [6] to employ only intermediate recombination on step-size vectors, that is, 0, v , and $.
3.2 Mutation Operators
Mutations are main operators of the FCEA. After the recom- bination, a mutation operator is applied to the “family father” or the new offspring generated by a recombination. In FCEA, the mutation is performed independently on each vector ele- ment of the selected individual by adding a random value with expectation zero:
x; = xj
+
wD(.),
(8)where xj is the thickness of the jth layer of z, 2; is the j t h
variable of z’ mutated from z, D ( - ) is a random variable, and w is the step size. In this paper,
D(.)
is evaluated as N(0,l) or C(1) if the mutations are, respectively, Gaussian mutation or Cauchy mutation.Self-Adaptive Gaussian Mutation: We adapted Schwe- fel’s [24] proposal to use self-adaptive Gaussian mutation. The mutation is accomplished by first mutating the step size
vj and then the thickness zj:
vj” = v; exp[.r’N(o, 1)
+
~ N j ( 0 , I)], (9)Figure 4: Difference of the search spaces between self- adaptive and decreasing-based mutations
where N ( 0 , l ) is the standard normal distribution. N j ( 0 , l ) is a new value with distribution N ( 0 , l ) that must be regener- ated for each index j . For FCEA, we follow [6] in setting T
and T’ as
(a)-’
and(m)-’,
respectively.Self-Adaptive Cauchy Mutation: We follow previous works [32] to define self-adaptive Cauchy mutation as fol- lows:
$$ = ?+h;exp[~’N(0,1) + ~ N j ( o , l ) ] , (11)
z; = 2; +$;cj(t). (12)
In our experiments. t is 1. Note that self-adaptive Cauchy mutation is similar to self-adaptive Gaussian mutation except that (10) is replaced by (12).
Decreasing-Based Gaussian Mutations: Our decreasing-based Gaussian mutation uses the step-size vector (T with a fixed decreasing rate y = 0.97 as follows:
ffc = ycr” (13)
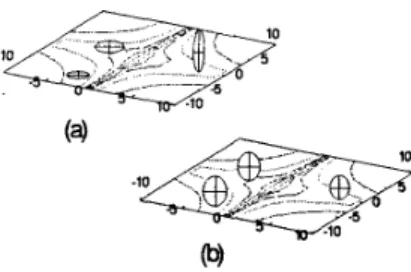
z; = z; +ffCNj(O,l) (14) Previous results [3 11 demonstrated that self-adaptive mu- tations converge faster than decreasing-based mutations but, for rugged functions, self-adaptive mutations more easily trapped into local optima than decreasing-based mutations.
For decreasing mutation, it is like we search for a better child in a hypersphere centered at the parent. However, for self-adaptive mutation, the search space becomes a hyperel- lipse. Fig. 4 illustrates this difference by two-dimensional contour plots. Therefore, children are searched in two differ- ent types of regions. These can be reasons why we want to
use these three types of mutations.
3.3 Adaptive Rules
The performance of Gaussian and Cauchy mutations is largely influenced by the step sizes. FCEA adjusts the step sizes while mutations are applied (e.g. (9), ( l l ) , and (13)). However, such updates insufficiently consider the perfor- mance of the whole family. Therefore, after the family com- petition, some additional rules are implemented:
A-decrease-rule: Immediately after self-adaptive mu- tations, if objective values of all offspring are greater than or equal to that of the “family father,” we decrease the step-size vectors w (Gaussian) or $J (Cauchy) of the parent:
wj” = 0.97wj”, (15) where wa is the step size vector of the parent. In other words, if there is no improvement after self-adaptive mutations, we may propose a more conservative be im- plemented. That is, smaller step size tends to make bet- ter improvement in the next iteration. This is inspired from the 1/5-success rule of (l+X)-ES [2].
D-increase-rule: It is difficult, however, to decide the rate 7 of decreasing-based mutations. Unlike self- adaptive mutations which adjust step sizes automati- cally, its step size goes to zero as the number of iter- ations increases. Therefore, it is essential to employ a rule which can enlarge the step size in some situations. The step size of the decreasing-based mutation should not be too small, when compared to step sizes of self- adaptive mutations. Here, we propose to increase 0 if either of the two self-adaptive mutations generates bet- ter offspring. To be more precise, after a self-adaptive mutation, if the best child with step size w is better than its “family father,” the step size of the decreasing-based mutation is updated as follows:
where w;,,,, is the mean value of the vector v ; and
0
is 0.2 in our experiments. Note that this rule is applied in stages of self-adaptive mutations but not of decreasing- based mutations.4
experimental Results
In this section we present the numerical results for the syn- thesis of two different optical coatings to illustrate the pro- posed method. We would to mention again that all the mate- rials were assume to be nonabsorting and nondispersive with normal incidence in this paper. Table 1 indicates the setting of FCEA parameters, such as initial step sizes, family com- petition lengths, and recombination probabilities. They are used for synthesis problems defined in this work. Ld. 0 , and
p , ~ are the parameters for decreasing-based mutation;
La,
v ,$, and p c ~ are for self-adaptive mutations. The population size is 50. These parameters are decided after experiments on these three optical coatings with various values.
4.1 Infrared Antireflection Coating
The first design problem is the synthesis of a wideband antire- flection (AR) coating for germanium in the infrared. At least 60 different solutions were published for this
AR
coating, in- cluding non-evolutionary approaches [l], [123, 1111, [141 and-3
~ --
probability (pC)
family competition I
I
LA = 6 (MA,)p , ~ =0.2 (M, and Mc) length . step sizes population size ( N ) L , = 6 (Myand M,) va = $; = 0.01. a, = 4v; 50 other notation
Table 2: Some solutions of FCEA for infrared antireflection coatings over the region 7.7
5
X5
12.3 pm on a q s = 4.0 substrate based on the refractive index pair 2.2 and 4.2.S-20 S-27 S-33 S-40 S-44 S-51 S-61 S-71
M 15 16 17 23 27 27 34 36 Cqd(pm)20.3427.0433.9640.1744.98 51.19 61.7 71.15 MF(%) 0.855 0.697 0.614 0.577 0.553 0.522 0.509 0.494
M: number of layers;
L T : total family competition length (ZL,
+
Ld);MF: value of merit function;
evolutionary approaches [5], [22], [23]. The target design was the reflectance R specified to zero at 0.1 pm wavelength increments between 7.7 and 12.3 pm; therefore, W defined
in (2) is 47. The incident medium is air (qm = 1) and the substrate refractive index is r ] , = 4.0. The high- and the low- index coating materials were Ge ( ~ h = 4.2) and ZnS ( q =
2.2).
The initial number of layers is randomly chosen from 15 to 40. The initial thickness of each layer was uniformly selected from the region from 0.2 to 1.0 pm. FCEA totally executed 100 times and the maximum number of generations is 2000. Table 2 shows several best solutions obtained by our FCEA on different total optical thickness.
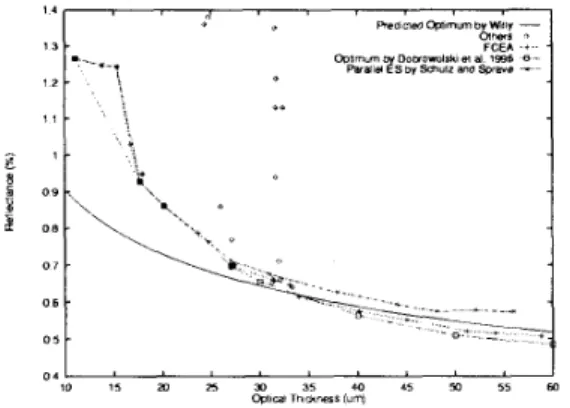
Some of solutions from the previous research and one pre- dicted curve by Willey [28] are shown in Fig. 5. One curve obtained by Dobrowolski [ 131 and believed to correspond to optimum solutions is also plotted. Fig. 5 shows that several, but by no means all, of these published solutions lie close to the believable optimum curve. Nevertheless, a number of
Figure 5: Comparison FCEA with Parallel ES and over 20 approaches on the antireflection coating problem.
these solutions are relatively far from this curve. This implies the importance of using good starting designs or using good design techniques. Fig. 5 shows that the solutions of FCEA are very closed to the believable optimum curve. They are better than the solutions obtained by parallel evolution strat- egy [23] when the total thickness is larger than 35 um. FCEA is also very competitive with well-known approaches, such as damped least square, modified gradient. Hook and Jeeves search [ 13. genetic algorithm [22], and evolution strategy [5].
There are some observations according to Fig. 5.
1. Willey's predicated optimal values [28] were overesti- mated when the total thickness is lower than 30 pm. The observation was consistent with the previous find- ings [23], [131.
2. In [23] authors described that Willey's predicatedcurve [28] was the best estimate when the total thickness is beyond 30 pm. The solutions obtained by FCEA are better than Willey's predicated values. Therefore, we claimed that the solutions obtained in [13] are corre- spond to the optimum solutions for this AR coating. 3. The solution quality will be improved when the num-
ber of layer is become larger and the total thickness is thicker. We would like to mention again that the cost of coatings increases with the number of layer. 4. We observed the "Bermuda triangle", i.e. great dif-
ference between the empirical and analytical estimate [23], in the region from 11 pm to 17 pm. The clusters of layers evident may be used to explain this observa- tion.
4.2 'kistimulus Filter
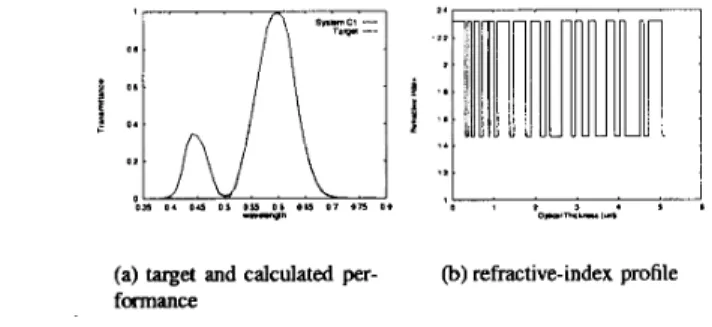
The requirement of the third example is to produce a filter that matches the CIEzx curve for the standard observer in the 380-780 nm spectral region [25]. This filter is used in the Uis- timulus colorimeters. The target curve is the solid line shown in Fig. 6(a). The final designs should consist of only two coating materials Si02 and NbzOs whose refractive indices are ql = 1.468 and q h = 2.323, respectively. Both substrate and medium are assumed to be made of glass whose index is qs = qm = 1.52. The merit function was defined at 41 equispaced points on the interesting wavelength scale.
The initial number of layers is randomly chosen from 25 to 35. The initial thickness of each layer was uniformly selected from the region from 0.01 to 0.1 pm. The maximum number of generations is 2000.
Fig. 6 shows a target performance and refractive-index profile of our FCEA for the CIEzx filter. The solution quality is 0.427% and the number of layers is 32. The total thickness is 5.13 pm. Fig. 6(b) shows the refractive-index profile of the solution. Table 3 shows that FCEA is very comparative with needle method 1251 which is a very powerful synthesis method.
(a) target and calculated per- f m a n c e (b) refractive-index profile FCEA number of layers 32 34 total thickness (Cqd)(pm) 5.13 4.8 MF(%) 0.421 0.588
Figure 6: The performance and refractive-index profile of our FCEA for the CIE2, filter of the tristimulus colorimeters in the region 380-780 nm. needle method [25] 31 3.982 0.62
5
Conclusions
This study presents that FCEA is a stable synthesis approach for optical thin-film designs. Our experience suggests that a global optimization method should consist of both global and local search strategies. For our FCEA, the decreasing- based mutation with large initial step sizes is the global search strategy; the self-adaptive mutations with family competition procedure and replacement selection are local search strate- gies. Based on the family competition and adaptive rules, these mutation operators can closely cooperate with one an- other. Experiments of three well-known optical coating prob- lems verify that the proposed approach is very comparative with evolutionary algorithms and traditional approaches. We believe that the flexibility and robustness of FCEA make it an effective synthesis method of optical thin-film designs.
In future, we will investigate a more flexible approach to adapt the number of layers of a coating system. We will also consider a flexible mechanism to adapt the family competi- tion lengths for improving the performance according to the performance improvement of mutations and the morphology of the landscape.
Bibliography
[ l ] J. A. Aguilera, J. Aguilera, P. Baumeister, A. Bloom, D. Coursen, J. A. Dobrowolski, F. T. Goldstein, D. E. Gustafson, and R. A. Kemp. Antireflection coatings for germanium IR optics: a comparison of numerical design methods. Applied Optics, 27( 14):2832-2840,1988. [2] T. Back. Evolutionary Algorithms in Theory and Prac-
tice. Oxford University Press, New York, USA, 1996.
[3] T. Back, U. Hammel, and H-P. Schwefel. Evolution-
ary computation: Comments on the history and current state. IEEE Trans. Evolutionary Computation. 1( lk3- 17, 1997.
[4] T. Back, F. Hoffmeister. and H-P. Schwefel. A survey of evolution strategies. In Proc. Fourth Int. Con$ on Genetic Algorithms. pages 2-9. 1991.
[5] T. Back and M. Schutz. Evolution strategies for mix- integer optimization of optical multilayer systems. In David B. Fogel and W. Atmar, editors, Proc. 4th Annu. Con5 on Evolutionary Programming, pages 33-5 1. Evolutionary Programming Society, San Diego. CA.
1995.
[6] T. Back and H-P. Schwefel. An overview of evolution algorithms for parameter optimization. Evolutionary Computation, l(1):l-23, 1993.
[7] B. G. Bovard. Derivation of a matrix describing a re- grate dielectric thin film. Applied Optics, 27( 10): 1998- 2005, 1988.
[8] J. A. Dobrowolski. Comparison of the fourier transform and flip-flop thin-film synthesis methods. Applied Op- tics. 25( 12): 19661972,1986.
[9] J. A. Dobrowolski. Merit function for more effective thin film calculations. Applied Optics, 28( 1O2824- 2831, 1989.
[ 101 J. A. Dobrowolski. Optical properties of films and coat- ings. In M. Bass. editor, Handbook of Optics, chap-
ter 42, pages 2824-2831. McGraw-Hill. New York.
1995.
[ 113 J. A. Dobrowolski. Numerical methods for optical thin films. Optics and Photonics News, 8(6):24-33, June 1997.
[ 121 J. A. Dobrowolski and R. A. Kemp. Refinement of opti- cal multilayer systems with different optimization pro- cedures. Applied Optics, 29( 19):287&2893. 1990. [13] J. A. Dobrowolski, A. V. Tikhonravov, M. K. Trubet-
skov, B. T. Sullivan, and P. G. Verly. Optimal single- band normal-incidence antireflection coatings. Applied Optics, 35(4):644-658,1996.
[14] J. Druessel and J. Grantham. Optimal phase modula- tion for gradient-index optical filters. Optics Letters,
18( 19): 1583-1585,1993.
[15] T. Eisenhammer, M. Lazarov, M. Leutbecher, U. Schoffel, and R. Sizmann. Optimization of in- terference filters with genetic algorithms applied
to
silver-based heat mirrors. Applied Optics, 32(3 1):63 1Cb 6315,1993.[16] D. B. Fogel. Evolutionary Compritation: Toward a New Philosophy of Machine Intelligent. NJ:IEEE Press, Pis- cataway, 1995.
[311 J.-M. Yang and C.-Y. Kao. Integrating adaptive muta- tions and family competition into genetic algorithms as function optimizer. Soft Computing, 4(2), to appear. [171 D. E. Goldberg. Genetic Algorithms in Search, Opti-
mization and Machine Learning. Addison-Wesley Pub- lishing Company, Inc., Reading, MA, USA, 1989.
[321 X. Yao and Y. Liu. Fast evolution strategies. In P. J. An- geline, R. G. Reynolds, J. R. McDonnell. and R. Eber-
hart, editors, Proc. 6th Annu. Conf on Evolutionary Programming (Lecture Notes in Computer Science, vol. 1213), pages 151-161,1997.
[18] H. Greniner. Robust optical coating design with evolu- tionary strategies. Applied Optics, 36(28):5477-5482,
1996.
[19] L. Li and J. A. Dobrowolski. Computation speeds of different optical thin-film synthesis methods. Applied Optics, 3 1( 19):379&3799, 1992.
[20] H. A. Macleod. Thzn film opticalfilters. McGraw-Hill, New York. 1986.
1211 S . Martin, J. Rivory, and M. Schoeanauer. Simulated darwinian evolution of homogenous multilayer system: a new method for optical coating design. Optical Com- munication, 110503-506, 1994.
[223 S . Martin, J. Rivory, and M. Schoeanauer. Synthesis of optical multilayer systems using genetic algorithms. Applied Optics, 34( 13k2247-2254,1995.
[23] M. Schutz and J. Sprave. Application of parallel mixed- integer evolutionary strategies with mutation rate pool- ing. In Proc. 5th Annu. Con$ on Evolutionary Program- ming, pages 345-354,1996.
1241 H.-P. Schwefel. Numerical Optimization of Computer Models. Chichester: Wiley, 1981.
[25] B. T. Sullivan and J. A. Dobrowolski. Implementation of a numerical needle method for thin-film design. Applied Optics, 35(28):5484-5492,1996.
[26] A. V. Tikhonravov. Some theoretical aspects of thin- Applied Optics, film optics and their applications.
32(28):54 17-5426,1993.
[27] W. J. Wild and H. Buhay. Thin film multilayer design optimization using monte car10 approach. Optics Let- ters, 11(1):745-747,1986.
[281 R. A. Willy. Predicting achievable design performance of broadband antireflective coating. Applied Optics, 32(28):5447-545 1,1993.
[29] J.-M. Yang and C.-Y. Kao. An evolutionary algorithm for synthesizing optical thin-film designs. In Parallel Problem Solving form Nature-PPSN
V
(Lecture Notes in Computer Science, vol. 1498), pages 947-958,1998. [30] J.-M. Yang and C.-Y. Kao. Flexible ligand docking us-ing a robust evolutionary algorithm. Journal of Compu- tational Chemistry, to appear.